Embed Size (px)
Citation preview
SYLLABI
and
SCHEME OF TEACHING
MASTER OF ENGINEERING
IN
MECHANICAL ENGINEERING
(ROBOTICS)
(2020-22)
MECHANICAL ENGINEERING DEPARTMENT
NATIONAL INSTITUTE OF TECHNICAL TEACHERS TRAINING & RESEARCH
CHANDIGARH
January, 2020
Instructions to Paper Setter
1. The examiner shall set eight questions, taking four questions each from Part-
A and Part-B of the syllabus. The candidate is required to attempt five
questions in all, taking at-least two questions from each Part-A and Part-B of
the question paper. The Question-paper should be fairly distributed over the
whole course of study and not concentrated on any one or a few portions only.
2. The Question-paper is to be set strictly according to the syllabus and not
according to the last years question paper, which is sent just as a sample only.
3. Special instructions if any, in regard to the paper should be followed.
4. For University examination the maximum marks are 50 and duration of
examination is 3 hours.
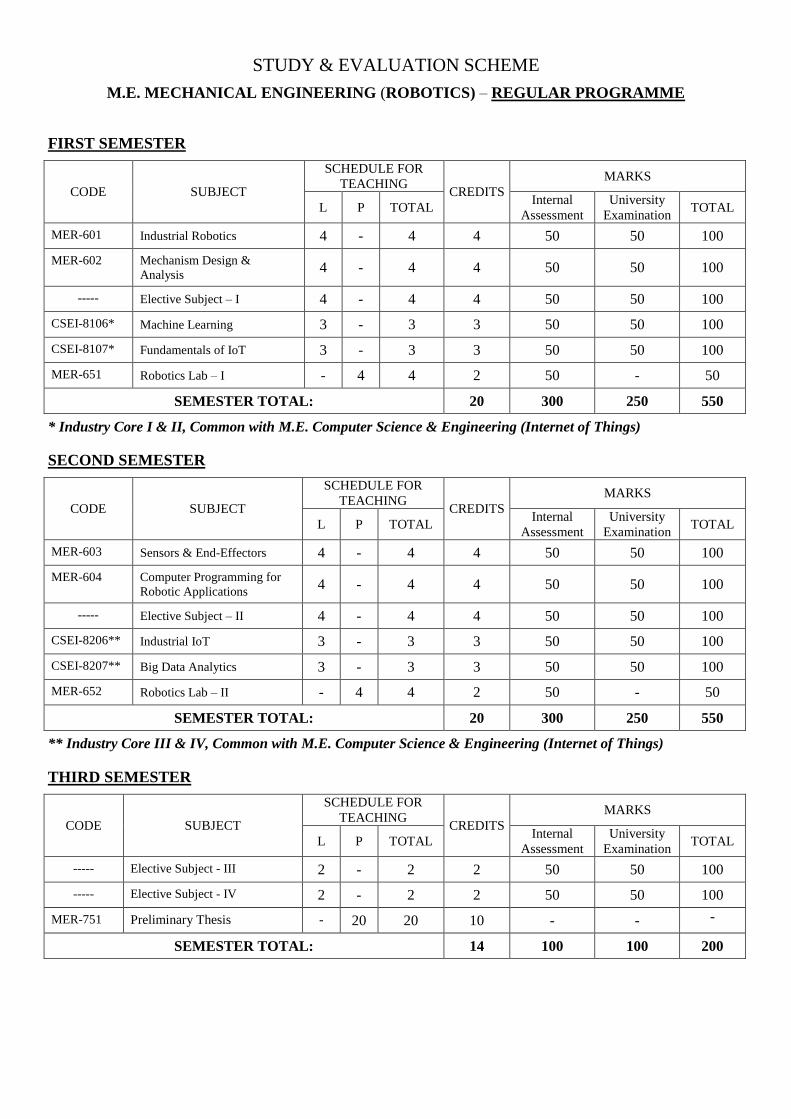
STUDY & EVALUATION SCHEME
M.E. MECHANICAL ENGINEERING (ROBOTICS) – REGULAR PROGRAMME
FIRST SEMESTER
CODE SUBJECT
SCHEDULE FOR
TEACHING CREDITS
MARKS
L P TOTAL Internal
Assessment
University
Examination TOTAL
MER-601 Industrial Robotics 4 - 4 4 50 50 100
MER-602 Mechanism Design &
Analysis 4 - 4 4 50 50 100
----- Elective Subject – I 4 - 4 4 50 50 100
CSEI-8106* Machine Learning 3 - 3 3 50 50 100
CSEI-8107* Fundamentals of IoT 3 - 3 3 50 50 100
MER-651 Robotics Lab – I - 4 4 2 50 - 50
SEMESTER TOTAL: 20 300 250 550
* Industry Core I & II, Common with M.E. Computer Science & Engineering (Internet of Things)
SECOND SEMESTER
CODE SUBJECT
SCHEDULE FOR
TEACHING CREDITS
MARKS
L P TOTAL Internal
Assessment
University
Examination TOTAL
MER-603 Sensors & End-Effectors 4 - 4 4 50 50 100
MER-604 Computer Programming for
Robotic Applications 4 - 4 4 50 50 100
----- Elective Subject – II 4 - 4 4 50 50 100
CSEI-8206** Industrial IoT 3 - 3 3 50 50 100
CSEI-8207** Big Data Analytics 3 - 3 3 50 50 100
MER-652 Robotics Lab – II - 4 4 2 50 - 50
SEMESTER TOTAL: 20 300 250 550
** Industry Core III & IV, Common with M.E. Computer Science & Engineering (Internet of Things)
THIRD SEMESTER
CODE SUBJECT
SCHEDULE FOR
TEACHING CREDITS
MARKS
L P TOTAL Internal
Assessment
University
Examination TOTAL
----- Elective Subject - III 2 - 2 2 50 50 100
----- Elective Subject - IV 2 - 2 2 50 50 100
MER-751 Preliminary Thesis - 20 20 10 - - -
SEMESTER TOTAL: 14 100 100 200
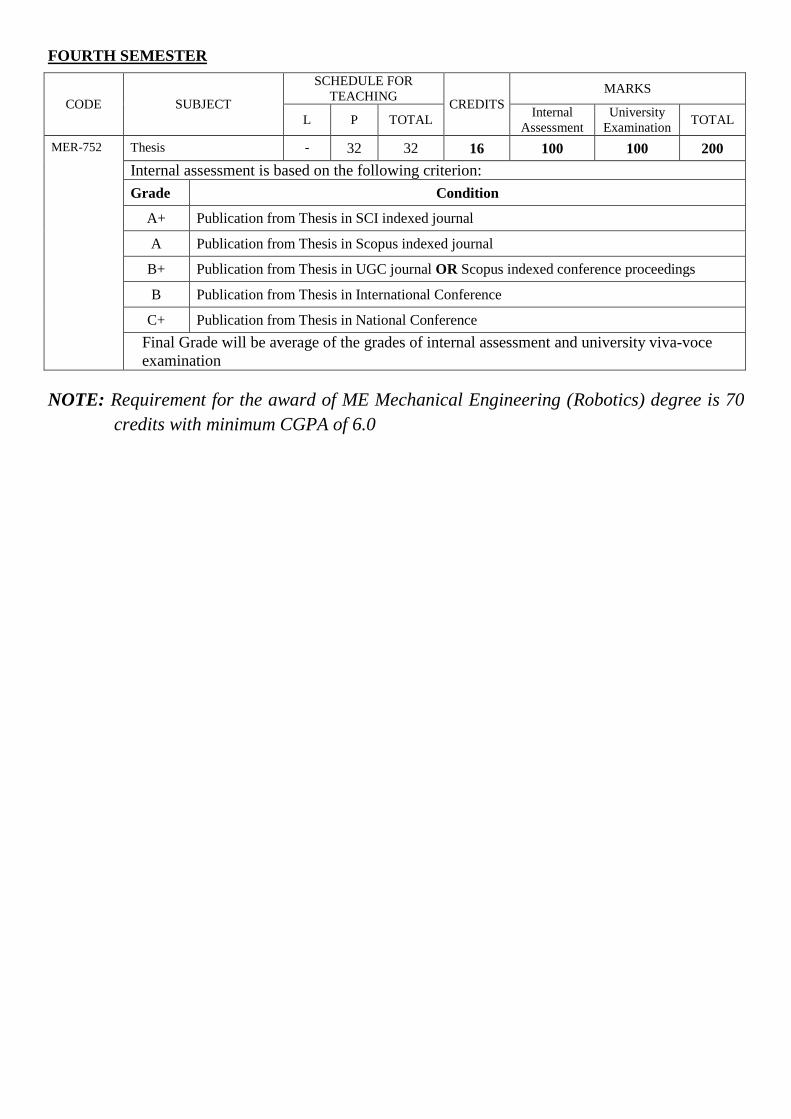
FOURTH SEMESTER
CODE SUBJECT
SCHEDULE FOR
TEACHING CREDITS
MARKS
L P TOTAL Internal
Assessment
University
Examination TOTAL
MER-752 Thesis - 32 32 16 100 100 200
Internal assessment is based on the following criterion:
Grade Condition
A+ Publication from Thesis in SCI indexed journal
A Publication from Thesis in Scopus indexed journal
B+ Publication from Thesis in UGC journal OR Scopus indexed conference proceedings
B Publication from Thesis in International Conference
C+ Publication from Thesis in National Conference
Final Grade will be average of the grades of internal assessment and university viva-voce
examination
NOTE: Requirement for the award of ME Mechanical Engineering (Robotics) degree is 70
credits with minimum CGPA of 6.0
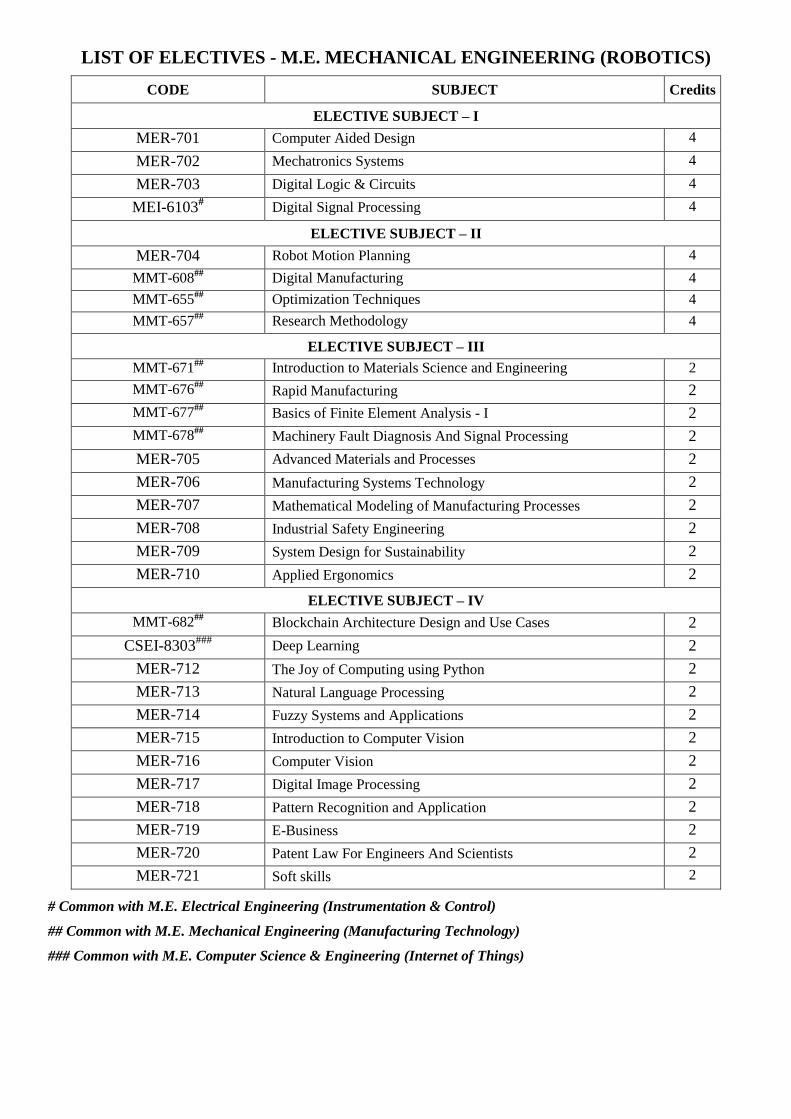
LIST OF ELECTIVES - M.E. MECHANICAL ENGINEERING (ROBOTICS)
CODE SUBJECT Credits
ELECTIVE SUBJECT – I
MER-701 Computer Aided Design 4
MER-702 Mechatronics Systems 4
MER-703 Digital Logic & Circuits 4
MEI-6103# Digital Signal Processing 4
ELECTIVE SUBJECT – II
MER-704 Robot Motion Planning 4
MMT-608## Digital Manufacturing 4
MMT-655## Optimization Techniques 4
MMT-657## Research Methodology 4
ELECTIVE SUBJECT – III
MMT-671##
Introduction to Materials Science and Engineering 2
MMT-676##
Rapid Manufacturing 2
MMT-677##
Basics of Finite Element Analysis - I 2
MMT-678##
Machinery Fault Diagnosis And Signal Processing 2
MER-705 Advanced Materials and Processes 2
MER-706 Manufacturing Systems Technology 2
MER-707 Mathematical Modeling of Manufacturing Processes 2
MER-708 Industrial Safety Engineering 2
MER-709 System Design for Sustainability 2
MER-710 Applied Ergonomics 2
ELECTIVE SUBJECT – IV
MMT-682##
Blockchain Architecture Design and Use Cases 2
CSEI-8303###
Deep Learning 2
MER-712 The Joy of Computing using Python 2
MER-713 Natural Language Processing 2
MER-714 Fuzzy Systems and Applications 2
MER-715 Introduction to Computer Vision 2
MER-716 Computer Vision 2
MER-717 Digital Image Processing 2
MER-718 Pattern Recognition and Application 2
MER-719 E-Business 2
MER-720 Patent Law For Engineers And Scientists 2
MER-721 Soft skills 2
# Common with M.E. Electrical Engineering (Instrumentation & Control)
## Common with M.E. Mechanical Engineering (Manufacturing Technology)
### Common with M.E. Computer Science & Engineering (Internet of Things)
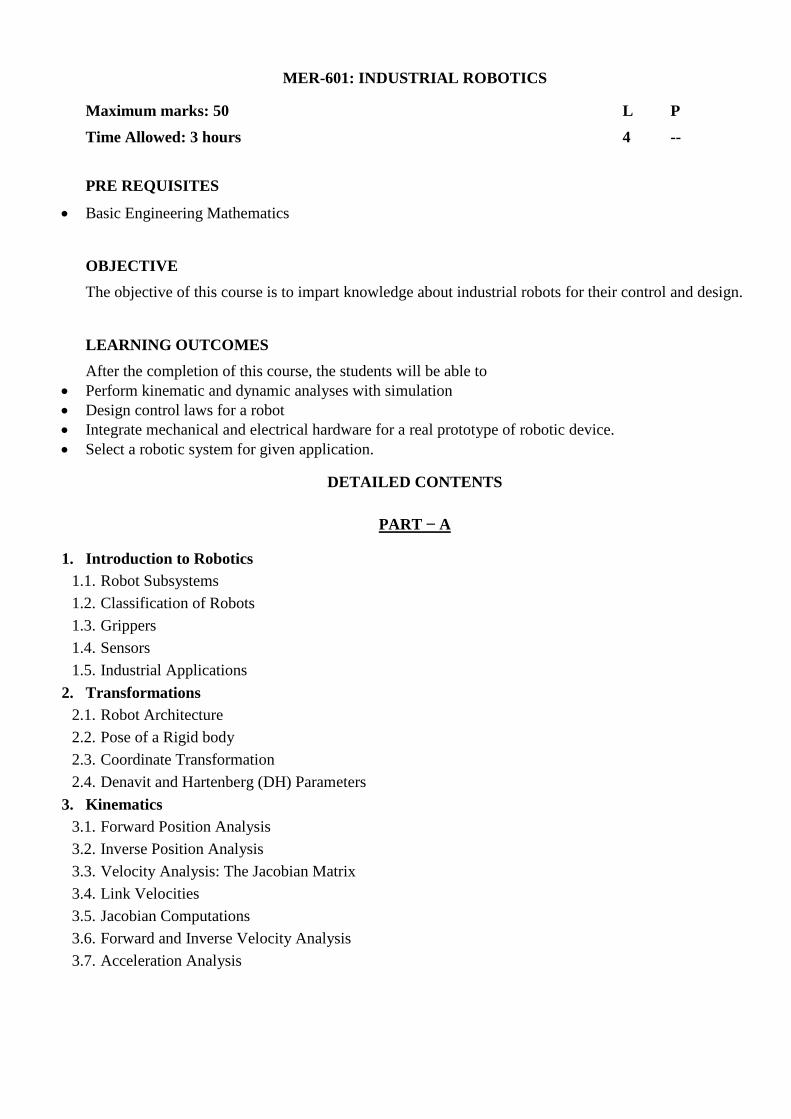
MER-601: INDUSTRIAL ROBOTICS
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Basic Engineering Mathematics
OBJECTIVE
The objective of this course is to impart knowledge about industrial robots for their control and design.
LEARNING OUTCOMES
After the completion of this course, the students will be able to
Perform kinematic and dynamic analyses with simulation
Design control laws for a robot
Integrate mechanical and electrical hardware for a real prototype of robotic device.
Select a robotic system for given application.
DETAILED CONTENTS
PART − A
1. Introduction to Robotics
1.1. Robot Subsystems
1.2. Classification of Robots
1.3. Grippers
1.4. Sensors
1.5. Industrial Applications
2. Transformations
2.1. Robot Architecture
2.2. Pose of a Rigid body
2.3. Coordinate Transformation
2.4. Denavit and Hartenberg (DH) Parameters
3. Kinematics
3.1. Forward Position Analysis
3.2. Inverse Position Analysis
3.3. Velocity Analysis: The Jacobian Matrix
3.4. Link Velocities
3.5. Jacobian Computations
3.6. Forward and Inverse Velocity Analysis
3.7. Acceleration Analysis
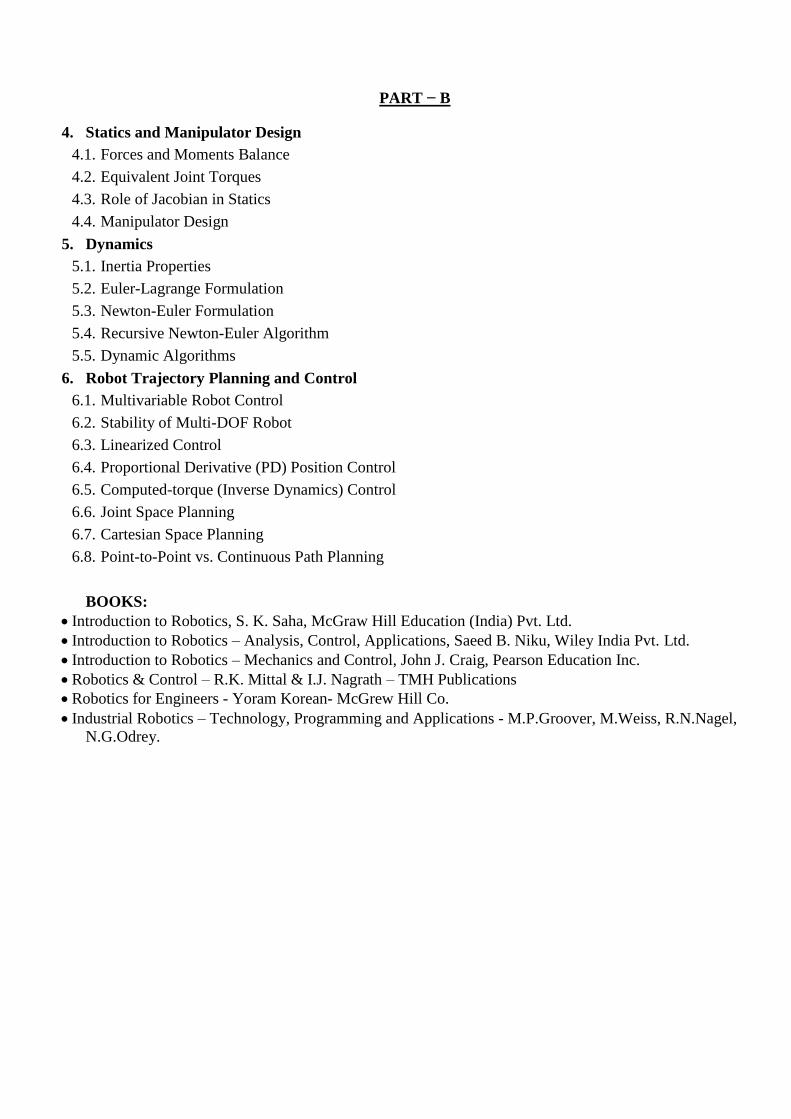
PART − B
4. Statics and Manipulator Design
4.1. Forces and Moments Balance
4.2. Equivalent Joint Torques
4.3. Role of Jacobian in Statics
4.4. Manipulator Design
5. Dynamics
5.1. Inertia Properties
5.2. Euler-Lagrange Formulation
5.3. Newton-Euler Formulation
5.4. Recursive Newton-Euler Algorithm
5.5. Dynamic Algorithms
6. Robot Trajectory Planning and Control
6.1. Multivariable Robot Control
6.2. Stability of Multi-DOF Robot
6.3. Linearized Control
6.4. Proportional Derivative (PD) Position Control
6.5. Computed-torque (Inverse Dynamics) Control
6.6. Joint Space Planning
6.7. Cartesian Space Planning
6.8. Point-to-Point vs. Continuous Path Planning
BOOKS:
Introduction to Robotics, S. K. Saha, McGraw Hill Education (India) Pvt. Ltd.
Introduction to Robotics – Analysis, Control, Applications, Saeed B. Niku, Wiley India Pvt. Ltd.
Introduction to Robotics – Mechanics and Control, John J. Craig, Pearson Education Inc.
Robotics & Control – R.K. Mittal & I.J. Nagrath – TMH Publications
Robotics for Engineers - Yoram Korean- McGrew Hill Co. Industrial Robotics – Technology, Programming and Applications - M.P.Groover, M.Weiss, R.N.Nagel,
N.G.Odrey.
MER-602: MECHANISM DESIGN AND ANALYSIS
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Engineering mathematics
Engineering mechanics
OBJECTIVE
The objective of this course is to develop competency in graphical and analytical method for solving
problems in static and dynamic force analysis.
LEARNING OUTCOMES
After the completion of this course, the students will be able to
Understand the fundamentals of the theory of kinematics and dynamics of machines.
Understand techniques for studying motion of machines and their components.
Use computer software packages in modern design of machines
DETAILED CONTENTS
PART − A
1. Basics of Mechanisms and Machines
1.1 Types of Motion, Links, Kinematic Pair, Types of Joints, Degree of Freedom
1.2 Classification of Kinematic Pairs, Kinematic Chain, Linkage, Mechanism and Structure
1.3 Planar, Spheric, and Spatial Mechanisms
1.4 Inversions of Four-bar and Slider Crank Mechanism
1.5 Grashof's Law and Mechanical Advantage
1.6 Mobility of Mechanisms, Transmission Angle
1.7 Pantograph, Straight Line Mechanisms
2. Kinematic Synthesis of Mechanisms
2.1 Velocity and Acceleration Diagrams for four bar and six bar mechanisms, Velocity by Instantaneous
Centre Method, Klein Construction, Aronhold-Kennedy Theorem of Three Centers
2.2 Radius of Curvature of a Point Trajectory Using Kinematic Coefficients
2.3 Stages of Kinematic Synthesis and Errors, Chebyshev Spacing of Precision points
3. Vibrations
3.1 Definition and Types of vibrations
3.2 Natural frequencies of simple systems
3.3 Types of damping- Analysis with viscous damping - Derivations for over, critical and under damped
systems, Logarithmic decrement and Problems.
3.4 Principle modes of vibrations, Normal mode and natural frequencies of systems
3.5 Dynamic testing of machines and structures
PART − B
4. Friction and Friction Drives
4.1 Types & Laws of friction, Coefficient of Friction, Uniform Pressure and Uniform Wear
4.2 Law of Belting, Ratio of Friction Tensions in Belts, Power Transmitted by Belts and Ropes,
Maximum Power Transmission by Belt
4.3 Classification of Gears, Gear Terminology
4.4 Law of Gearing, Velocity of sliding, Gear Teeth Profile, Path of Contact, Arc of Contact, Contact
Ratio
4.5 Interference of in Involute Gears, Minimum Number of Teeth, Undercutting, Gear Forces, Different
Types of Gear Trains, Analysis of Epicyclic Gear Train
5. Structural Analysis
5.1 Free body diagram and its importance
5.2 Classification of structures and components
5.3 Notion of stress – normal stress, shear stress and bearing stresses
5.4 Stresses on inclined plane in an axial member
5.5 Strain – normal strain, shear strain
5.6 Mechanical properties – elasticity, plasticity, creep, fatigue, buckling etc.
5.7 Deformation of axial members
6. Finite Element Analysis
6.1 Introduction to FEA
6.2 Steps of Finite Element Modeling & Analysis
6.3 Structural Analysis of mechanism
6.4 Modal Analysis of mechanism
6.5 Optimization using FEA Technique
Text books:
1. Dally and Riley, “Experimental stress analysis”, McGraw-Hill International Student Edition, McGraw-
Hill Book Company.
2. Theory of Machines and Mechanisms, A. Ghosh and A.K. Mallik, Affiliated East- West Press
3. Theory of Machines and Mechanisms, J. E. Shigley and J. J. Uicker, 2nd Ed., McGraw-Hill
4. Ferdinand P. Beer, E. Russell Johnston and Jr.John T. DeWolf “Mechanics of Materials”, Tata
McGraw-Hill, Third Edition, SI Units
References:
1. Kinematic Synthesis of Linkages, R. S. Hartenberg and J. Denavit, McGraw-Hil
2. Design of Machinery: An Introduction to the Synthesis and Analysis of Mechanisms and Machines,
Robert L.Norton, Tata McGraw-Hill, 3rd Edition
3. Ferdinand P. Beer, E. Russell Johnston and Jr.John T. DeWolf “Mechanics of Materials”, Tata
McGraw-Hill, Third Edition, SI Units
CSE 8106: MACHINE LEARNING (Common with M.E. Computer Science & Engineering - Internet of Things)
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Basics of Probability
Linear Algebra
Calculus
OBJECTIVE
This course will serve as a comprehensive introduction to various topics in machine learning.The objective
is to familiarize the audience with some basic learning algorithms and techniques and their applications, as
well as general questions related to analyzing and handling large data sets. At the end of the course the
students should be able to design and implement machine learning solutions to classification, regression, and
clustering problems; and be able to evaluate and interpret the results of the algorithms.
LEARNING OUTCOMES
At the end of the course, the students will be able to:
Understand the fundamental issues and challenges of machine learning.
Understand the strengths and weaknesses of many popular machine learning approaches.
Interpret the underlying mathematical relationships within and across Machine Learning algorithms
and the paradigms of supervised and un-supervised learning.
Design and implement various machine learning algorithms in a range of real-world applications.
DETAILED CONTENTS
PART − A
1. Introduction
1.1. Supervised Learning
1.2. Decision Trees & CART
1.3. Linear regression
1.4. SGradient Descen
2. Probabilistic Models
2.1. Bayes classifier
2.2. Bayes classifier
2.3. Hidden Markov models (HMMs) for pattern classification
3. Design and Analysis of Experiments
3.1. Cross validatio
3.2. Performance measures
3.3. CI Estimation
3.4. Hypothesis Testing
PART − B
4. Unsupervised Learning
4.1. Criterion functions for clustering
4.2. Techniques for clustering -- K-means clustering
4.3. Gaussian Mixture Models
4.4. Hierarchical clustering
4.5. Density based clustering
5. Dimensionality Reduction Techniques
5.1. Principal component analysis
5.2. Fisher discriminant analysis
5.3. Multiple discriminant analys
BOOKS
Introduction Machine Learning by Tom Mitchell
Introduction to Machine Learning by Ethem Alpaydin
Introduction to Statistical Learning, Gareth James, Daniela Witten, Trevor Hastie, Robert Tibshirani,
Springer, 2013.
Pattern Classification, 2nd Ed., Richard Duda, Peter Hart, David Stork, John Wiley & Sons, 2001.
CSEI 8107 FUNDAMENTALS OF IOT (Common with M.E. Computer Science & Engineering - Internet of Things)
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Basics of Sensors
Machine Level Programming
OBJECTIVE
This course focuses on the latest microcontrollers with application development, product design and
prototyping. This also focuses on interoperability in IoT along with various IoT Platforms for application
development.
LEARNING OUTCOMES
At the end of the course, the students will be able to:
Understand the various network protocols used in IoT
Understand the role of Big Data, Cloud Computing and Data Analytics in a typical IoT system.
Design a simple IoT system made up of sensors, wireless network connection, data analytics and
display/actuators, and write the necessary control software.
Build and test a complete IoT system.
DETAILED CONTENTS
PART − A
1. Introduction
1.1. Introduction to IoT
1.2. Sensing
1.3. Actuation
1.4. Basics of Networking
1.5. Communication Protocols
1.6. Sensor Networks
1.7. Machine to Machine Communications
1.8. Understanding of the IoT ecosystem
1.9. various layers in building an IoT application and interdependencies
2. INTEROPERABILITY IN IoT
2.1. Introduction to Arduino Programming
2.2. Integration of Sensors and Actuators with Arduino
2.3. Introduction to Python programming
PART − B
3. SDN FOR IoT
3.1. Introduction to SDN
3.2. SDN for IoT
3.3. Data Aggregation
3.4. Handling and Analytics
3.5. Cloud Computing
3.6. Sensors
3.7. Fog Computing
3.8. Understanding of the various protocols being used in IoT like MQTT, AMQP, REST API
4. Iot Platforms and Applications
4.1. Understanding of the IoT platforms like PTC Thingworx and IoT frameworks like MS Azure
4.2. Understanding of the usage of these platforms to build applications like Smart Cities and Smart
Homes
4.3. Connected Vehicles
4.4. Smart Grid
4.5. Case Study: Agriculture, Healthcare, Activity Monitoring
BOOKS
David Etter, “IoT (Internet of Things) Programming: A Simple and Fast Way of Learning IoT,” Kindle
Edition
Jan Holler, VlasiosTsiatsis, Catherine Mulligan, Stefan Avesand, Stamatis Karnouskos, and David
Boyle, “From Machine to Machine to the Internet of Things: Introduction to a New Age of Intelligence,”
Elsevier Science Publishing Co. Inc, 2014.
Pethuru Raj and Anupama C. Raman, “The Internet of Things: Enabling Technologies, Platforms, and
Use Cases,” 1st Edition, Auerbach Publications, 2017
Yasuura, H., Kyung C.M., Liu Y., and Lin Y.L., “Smart Sensors at the IoT Frontier,” 1st Edition,
Springer International Publishing, 2018.
MER-651: ROBOTICS LAB – I
L P
-- 4
Note: The internal evaluation of the work done by the student will be based on a file documenting the practical work
carried out during the course followed by a viva-voce examination.
PRACTICE TASKS
1. Study of a robotic manipulator and its components.
2. Study of robot Teach-pendant functions and its use in moving robot wrist in joint space and
Cartesian space.
3. Use of teach-pendant for recording wrist positions and speed control.
4. Use of teach-pendant for making simple robot programs for pick and place operations.
5. Creating geometrical models of simple structural components using CAD software.
6. Structural analysis of a cantilever in FEA software.
7. Modal analysis of a cantilever in FEA software.
8. Study of basic components used in IoT.
9. Building a simple IoT application using smartphone and free cloud service.
10. Implementing a simple machine learning algorithms using ANN.
MER-603: SENSORS AND END-EFFECTORS
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Basic electronics
OBJECTIVE
The objective of this course is to understand the basic concepts of sensor and instruments and to select
appropriate instruments for various applications.
LEARNING OUTCOMES
After the completion of this course, the students will be able to
Compare the different types of sensors and transducers.
Classify the need of sensors for various processes
Rectify errors in sensors.
DETAILED CONTENTS
PART − A
1. INTRODUCTION
1.1 Role of Sensors in Robotic system
1.2 Internal and External Sensors
1.3 Gripper for Mechanization and Automation
1.4 Sensors specifications
1.5 Selection of Sensors and Grippers
2. Proximity, Displacement, Velocity and Acceleration Sensors
2.1 Proximity Sensors of various types
2.2 Encoder
2.3 Potentiometer
2.4 LVDT
2.5 Synchros and Resolvers
2.6 Tachometer
2.7 Hall-Effect Sensor
2.8 Accelerometer
3. Force and Touch Sensors
3.1 Strain Gauge
3.2 Piezoelectric Sensor
3.3 Current Based Sensing
3.4 Pressure transducers
3.5 Piezo resistive sensors
3.6 Surface acoustic wave
PART − B
4. Range Sensors
4.1 Ultrasonic sensors
4.2 Microwave sensors
4.3 Laser sensors
4.4 Infrared range sensor
5. Vision System Sensors:
5.1 Elements in Vision Sensor
5.2 Camera Vision Sensing
5.3 Image processing in vision system
6. End-Effectors
6.1 End Effectors and Types-Mechanical, Pneumatic and Hydraulic, Magnetic, Vacuum
6.2 Two Fingered and Three Fingered Mechanical gripper
6.3 Selection and Design Considerations.
6.4 End Effector design case studies
Recommended Books:
1. Sensor & transducers, D. Patranabis, 2nd edition, PHI
2. Instrument transducers, H.K.P. Neubert, Oxford University press.
3. Measurement systems: application & design, E.A.Doebelin, Mc Graw Hill
4. Klafter R.D., Chmielewski T.A and Negin M., “Robotic Engineering – An Integrated Approach”,
Prentice Hall, 2003.
MER-604: COMPUTER PROGRAMMING FOR ROBOT APPLICATIONS
Maximum marks: 50 L P
Time Allowed: 3 hours --
PRE REQUISITES
Basic Engineering Mathematics
OBJECTIVE
The objective of this course is to provide a practical understanding and applications of various
programming tools for industrial automation.
LEARNING OUTCOMES
After the completion of this course, the students will be able to
Learn basics of MATLAB programming
Understand the main features of the MATLAB program development environment to enable their
usage in the higher learning.
Interpret and visualize simple mathematical functions and operations thereon using plots/display.
DETAILED CONTENTS
PART − A
1. Computer Programming
1.1 Introduction to Computer Programming
1.2 Algorithm and Pseudo-code
1.3 Compilers and Interpreters
1.4 Overview of High Level Programming Languages
2. Introduction to MATLAB
2.1 MATLAB Environment
2.2 Scalar and Vector Data types
2.3 Matrix manipulation
2.4 Saving and Retrieving Data using MAT-Files
2.5 Cell Arrays and Structures
2.6 Character Strings
2.7 Relational and Logical Operations
2.8 Plotting 2D and 3D graphs
2.9 Applications – Solving linear systems of equations, Curve fitting and Interpolation
3. Programming using MATLAB
3.1 Introduction – M-Files, User Input/output, Script-Files and Function-Files
3.2 Control Flow – For Loops, While Loops, If-Else-End Constructs, Switch-Case Constructs, Try-Catch
Blocks
3.3 Functions – Function Construction Rules, Input and Output Arguments, Scope of Variables,
Function Handles, Anonymous Functions, Nested Functions, Private Functions, Overloaded Functions
3.4 Exchanging Data with MAT-Files
3.5 Low level File I/O
PART − B
4. Modeling and Simulation using MATLAB/Simulink
4.1 Introduction to Graphical Programming
4.2 Simulink Basics
4.3 Creating Models using Blocks and Signals
4.4 Running Simulations and Analyzing Results
4.5 Modeling and Simulating Dynamic Systems
5. Robotics System Toolbox
5.1 Features of Robotic System Toolbox
5.2 Building Robot Models
5.3 Coordinate System Transformations
5.4 Inverse Kinematics and Dynamics
5.5 Trajectory Tracking
5.6 Using Robot Operating System (ROS)
BOOKS:
1. Rudra Pratap, “Getting Started with MATLAB 7”, Oxford University Press, 2009
2. Duane Hanselman and Bruce Littlefield, “Mastering MATLAB 7”, Pearson Education, 2009
3. S. J. Chapman, “Programming in MATLAB for Engineers”, Brooks/Cole Thomson Learning, 2004.
4. Agam Kumar Tyagi, “MATLAB and Simulink for Engineers”, Oxford University Press, 2012
CSEI 8206 INDUSTRIAL IOT (Common with M.E. Computer Science & Engineering - Internet of Things)
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Fundamentals of IoT
OBJECTIVE
To Introduce the state of art of Industrial IoT with smart machines that performs pervasive sensing distinct
from M2M communication. The course is a blend of engineering and business of IoT. It deals with
connectivity in industrial networks, building systems to enable delivery of software services networked to
the cloud platforms. At the end of the course, the students will be in a position to start an Industrial IoT
business.
LEARNING OUTCOMES
At the end of the course, the students will be able to:
Understand Industry 4.0 Standards and IIOT Architecture.
Apply Intelligent algorithms for IIOT based Applications.
Analyse the security threats of IIOT.
Evaluate various components of Cyber Physical Systems in the context of Industry 4.0
DETAILED CONTENTS
PART − A
1. Introduction to Industry 4.0
1.1. Globalization and Emerging Issues
1.2. The Fourth Revolution
1.3. LEAN Production Systems
1.4. Smart and Connected Business Perspective
1.5. Smart Factories
1.6. Cyber Physical Systems and Next Generation Sensors
1.7. Collaborative Platform and Product Lifecycle Management
1.8. Augmented Reality and Virtual Reality
1.9. Artificial Intelligence
1.10. Big Data and Advanced Analysis.
1.11. Cybersecurity in Industry 4.0
2. Basics of Industrial IoT
2.1. Industrial Processes
2.2. Industrial Sensing & Actuation
2.3. Industrial Internet Systems
3. IIoT-Introduction, Industrial IoT
3.1. Business Model and Reference Architecture: IIoT-Business Models-Part I, Part II
3.2. IIoT Reference Architecture
4. Industrial IoT- Layers
4.1. IIoT Sensing
4.2. IIoT Processing
4.3. IIoT Communication
4.4. IIoT Networking
PART − B
5. Industrial IoT
5.1. Big Data Analytics and Software Defined Networks
5.2. Fisher discriminant analysis
5.3. Multiple discriminant analys
6. IIoT Analytics
6.1. Introduction
6.2. Machine Learning and Data Science, and Julia Programming,
6.3. Data Management with Hadoop
6.4. Data Center Networks
6.5. Security and Fog Computing: Cloud Computing in IIoT
7. Industrial IoT-
7.1. Security and Fog Computing
7.2. Application Domains: Factories and Assembly Line
7.3. Food Industry
7.4. Healthcare
7.5. Power Plants
7.6. Inventory Management & Quality Control
7.7. Plant Safety and Security (Including AR and VR safety applications)
7.8. Facility Management
8. Industrial IoT- Application Domains
8.1. Oil
8.2. chemical and pharmaceutical industry
8.3. Applications of UAVs in Industries
8.4. Real case studies
BOOKS:
Enterprise IoT Strategies and Best Practice for Connected Products and Services. – Dirk Slama, Frank
Puhlmann, Jim Mirrish, Rishi M Bhatnagar
The Internet of Things: Key Applications and Protocols - David Boswarthick
The Silent Intelligence, The Internet of Things. By – Daniel Kellmereit, Daniel Obodovski.
Industry 4.0: The Industrial Internet of Things”, by Alasdair Gilchrist (Apress)
Industrial Internet of Things: CybermanufacturingSystems”by Sabina Jeschke, Christian Brecher,
Houbing Song, Danda B. Rawat (Springer).
CSE 8207 BIG DATA ANALYTICS (Common with M.E. Computer Science & Engineering - Internet of Things)
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Basics knowledge of Python or any Object Oriented Programming Language
OBJECTIVE
The objective of this course is to teach the emerging concepts and case studies of Big Data with the real
world case studies. In addition, the course focuses towards the coverage of data acquisition, storage,
processing, querying and visualization with hands-on-practice using various big data analytics tools.
LEARNING OUTCOMES
At the end of the course, the students will be able to:
Understand the concepts of Big Data Analytics with real world case studies.
Acquire, store and process Big Data from various sources.
Analyse and visualize Big Data.
Apply Big Data Analytics in various domains
DETAILED CONTENTS
PART − A
1. Introduction to Big Data
1.1. Definition
1.2. various tools for Big Data
1.3. Possibilities of Big Data storage using RDBMS
1.4. Data Warehousing and Data Marts concept
1.5. Types of analytics - Descriptive, Diagnostic, Predictive, Prescriptive
1.6. Big Data characteristics - Volume, Velocity, Variety, Veracity, Value, Data analysis flow
1.7. Big data examples, applications & case studies.
2. Big Data Architectures & Patterns
2.1. MapReduce
2.2. Sharding
2.3. Bloom Filters
2.4. Lambda Architecture
2.5. Consistency
2.6. Availability & Partition Tolerance (CAP)
2.7. Consensus in Distributed Systems
2.8. Leader Election and Other analytics patterns
3. Python Programming for Big Data Applications
3.1. Introduction to Python
3.2. Big Data stack setup and examples
3.3. Hortonworks Data Platform/Apache Ambari
3.4. Amazon EMR, Running Python
3.5. MapReduce examples on big data stack.
4. Data Acquisition
4.1. Apache Flume
4.2. Apache Sqoop
4.3. Publish - Subscribe Messaging Frameworks
4.4. Big Data Collection Systems
4.5. Messaging queues
4.6. Custom connectors
4.7. Implementation example
5. Big Data Storage
5.1. HDFS
5.2. HBase
5.3. Kudu
6. NoSQL Databases
6.1. Key-value databases
6.2. Document databases
6.3. Column Family databases
6.4. Graph database
PART − B
7. Standard ETL Tools
7.1. Standard Industry tools
8. Batch Data Analysis
8.1. Hadoop & YARN
8.2. MapReduce & Pig
8.3. Spark core
8.4. Batch data analysis examples & case studies
9. Real-time Analysis
9.1. Stream processing with Storm
9.2. In-memory processing with Spark Streaming
9.3. Real-time analysis examples & case studies
10. Interactive Querying
10.1. Hive,
10.2. Spark SQL,
10.3. Interactive querying examples & case studies
11. Cloud Computing Platforms
11.1. Amazon Web Services (AWS)
11.2. Deploying Big Data applications in the cloud
12. Web Frameworks & Serving Databases
12.1. Django - Python web framework
12.2. Using different serving databases with Django
13. Data Visualization
13.1. Building visualizations with Lightning,
13.2. pyGal&Seaborn
BOOKS:
Arshdeep Bahga, Vijay Madisetti, "Big Data Analytics: A Hands-On Approach", VPT Publishers,
2018
Big Data Black Book, D T editorial service, Dreamtech Press, Wiley India; 1st edition, 2016.
Baesens Bart, "Analytics in A Big Data World - The Essential Guide To Data Science and Its
Applications", Wiley, 2014
Radha Shankarmani, M. Vijayalakshmi, "Big Data Analytics", Wiley, 2016
Acharya Seema, Subhashini Chellappan, "Big Data and Analytics", Wiley, 2015
NPTEL Course on “The Joy of Computing using Python” by Dr.
SudarshanIyengarhttps://onlinecourses.nptel.ac.in/noc18_cs35/preview
NPTEL Course on “Programming, Data Structures and Algorithms in Python” by Dr.
MadhavanMukundhttps://onlinecourses.nptel.ac.in/noc16_cs11/preview
NPTEL Course on “Big Data Computing” by Dr. Rajiv
Misrahttps://onlinecourses.nptel.ac.in/noc19_cs33/preview
Dive into Python 3, Mark Pilgrim, http://www.diveintopython3.net).
MER-652: ROBOTICS LAB – II
L P
-- 4
Note: The internal evaluation of the work done by the student will be based on a file documenting the practical work
carried out during the course followed by a viva-voce examination.
PRACTICE TASKS
1. Study of functioning of proximity sensor and potentiometer using digital multimeter.
2. Study of sensors used for sensing/measuring various parameters in robotic systems.
3. Study of working of different types of robotic grippers.
4. Write a MATLAB program for inverse kinematics of 3-link planar robotic arm.
5. Write a MATLAB program for plotting joint angles and torque for a 2-link planar robotic arm
6. Use of Robotic Systems Toolbox for building robot models.
7. Use of Robotic Systems Toolbox for forward/inverse kinematics/dynamics in robots.
8. Extraction and uploading of machine data on a free cloud service.
9. Exercises on use of RDBMS for storage of big data.
10. Using Amazon Web Service for deployment and retrieval of Big Data.
MER-701: COMPUTER AIDED DESIGN
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
NIL
OBJECTIVE
The objective of this course is to provides an introduction into engineering design and communication
through the use of computer aided design (CAD) software
LEARNING OUTCOMES
After the completion of this course, the students will be able to
Integrate the role of graphic communication in the engineering design process
Generate and interpret engineering technical drawings of parts and assemblies according to
engineering design standards.
Use CAD software to generate a computer model and technical drawing for a simple, well-defined part
or assembly.
DETAILED CONTENTS
PART − A
1. Computer Aided Design
1.1 Design processes and computer aided design
1.2 Hardware and software in CAD
1.3 Parametric and variational design
2. CAD Features
2.1 Components of CAD software and their function
2.2 Introduction and essential features of graphics package
2.3 Configuration of graphics package
2.4 Geometric transformations-2D and 3D
3. Geometric Modelling
3.1 Curves-mathematical representation of analytical and synthetic curves
3.2 Curve manipulation
3.3 Surfaces and their representation
3.4 Solids-representation techniques and manipulation of solids
PART − B
4. CAD Database
4.1 Need and features of CAD data base
4.2 Data structures
4.3 Data exchange and data exchange formats
5. Features of some Software Packages
5.1 Pro-Engineer
5.2 CATIA or INVENTOR
5.3 Geometrical modeling of simple components
6. CAD in Robotics
6.1 Geometrical Modeling of Manipulator Links
6.2 Assembly of Links and Joints
6.3 Kinematic Analysis
BOOKS:
1. Chris McMahon and Jimmie Browne, “CAD/CAM Principles, Practices and Manufacturing
Management”, Prentice Hall, 1999
2. Groover M. P., “Automation, Production Systems and Computer Aided Manufacturing”, Pearson
Education, New Delhi, 2015
Ibrahim Zeid, R Sivasubramanian, “CAD/CAM – Theory and Practice”, Tata-McGraw Hill Ltd., New
Delhi, 2009
MER-702: MECHATRONICS SYSTEMS
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Basic Electronics and Mathematics
OBJECTIVE
The objective of this course is to provide the student with basic skills useful in identifying the concepts
of automated machines and equipment and describe the terms and phrases associated with
mechatronics.
LEARNING OUTCOMES
After the completion of this course, the students will be able to
Select & identify suitable mechatronics hardware for the given application.
Describe & explain potential areas of mechatronics
Differentiate various control aspects of automation
Demonstrate the self-learning capability of Industrial Automation.
DETAILED CONTENTS
PART − A
1. Introduction
1.1. Mechatronics & its Elements
1.2. Mechatronics Design Process
1.3. Integrated Design Issues in Mechatronics
1.4. Applications of Mechatronics
2. Modeling & Simulation of Physical Systems
2.1. Mathematical modeling of physical systems
2.2. Dynamic response of first and second order systems
2.3. System transfer functions
2.4. Block Diagram Approach
2.5. State Space Approach
3. Actuators
3.1. Fluid power control elements and standard graphical symbols
3.2. Directional, Pressure and Flow Control Valves – Construction and Working
3.3. Basic fluid power circuits
3.4. Mechanical & Solid state switches
3.5. AC and DC motors
3.6. Stepper motors
PART − B
4. Control Theory
4.1. Introduction to Open Loop & Closed Loop Control
4.2. Transient & Steady state performance characteristics
4.3. Frequency response
4.4. PID Controllers & their Tuning
4.5. Adaptive Control
5. Data Acquisition
5.1. Sensors
5.2. Operational amplifier
5.3. Protection and filtering
5.4. Digital signals
5.5. Data acquisition systems
6. Mechatronics System Design
6.1. Traditional & Mechatronics Design
6.2. Possible Mechatronics Design Solutions
6.3. Digital logic
6.4. Programmable logic controllers
6.5. Microcontrollers
6.6. Simple Logic Circuits using PLC and microcontroller
BOOKS:
1. David G. Alciatore, Michael B. Histand, “Introduction to Mechatronics and Measurement Systems”,
Tata McGraw Hill, 4th
Edition, 2014
2. W Bolton, “Mechatronics: A Multidisciplinary Approach”, Pearson Education, 4th
Edition, 2014
3. S R Majumdar, “Pneumatic Systems”, Tata McGraw Hill, New Delhi, 2008.
4. S R Majumdar, “Oil Hydraulic Systems”, Tata McGraw Hill, New Delhi, 2010
5. Groover M. P., “Automation, Production Systems and Computer Aided Manufacturing”, Pearson
Education, New Delhi, 2015
MER-703: Digital Logic and Circuits
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Basic Electronics and Mathematics
OBJECTIVE
The knowledge of digital logic and circuits is required for designing a robotic control system. This
subject will also enable the students to formulate Boolean expressions for programming the robot for
performing given tasks.
LEARNING OUTCOMES
After the completion of this course, the students will be able to
Formulate truth tables for different logic problems
Derive Boolean expressions for implementing logic
Identify components required for developing hardware for implementing logic
DETAILED CONTENTS
PART − A
1. Number System and Codes
1.1. Number System
1.2. Floating Point Representation of Numbers
1.3. Arithmetic Operations
1.4. Binary Coded Decimal (BCD)
1.5. Weighted Binary Codes
1.6. Non-Weighted Codes
1.7. Error Detecting & Correcting Codes
1.8. Alphanumeric Codes
2. Boolean Algebra and Minimization Techniques
2.1. Boolean Logic Operations
2.2. Basic Laws Of Boolean Algebra
2.3. Demorgan’s Theorems
2.4. Minimization Techniques
2.4.1. Sum Of Products and Product Of Sums
2.4.2. Karnaugh map
3. Logic Gates
3.1. Different Logic gates
3.2. Mixed logic
3.3. Multilevel gating networks
3.4. Multiple output gate networks
4. Logic families
4.1. Digital integrated circuits
4.2. Current-sourcing and current-sinking logic
4.3. Resistor-transistor logic
4.4. Resistor-capacitor-transistor logic
4.5. Diode-transistor logic
4.6. Transistor-transistor logic
5. Combinational Circuits
5.1. Multiplexers and Demultiplexers
5.2. Decoders and Encoders
5.3. Parity generators/checkers
5.4. Code converters
5.5. Magnitude comparator
PART − B
6. Flip-Flops
6.1. Latches
6.2. S-R flip flop
6.3. D flip-flop
6.4. J-K flip-flop
6.5. T flip-flop
7. Counters and Registers
7.1. Asynchronous counter
7.2. Synchronous counters
7.3. Counter ICs
7.4. Shift registers
7.5. Shift register counters
7.6. Sequence generator
8. Sequential Circuits
8.1. General sequential circuit model
8.2. Classification of sequential circuits
8.3. Synchronous sequential circuits
8.4. Fundamental mode Asynchronous sequential circuits
8.5. Pulse Mode Asynchronous sequential circuits
9. D/A and A/D Converters
9.1. Analog and digital data conversions
9.2. Characteristics of D/A converter
9.3. Types of D/A converters
9.4. Characteristics of A/D converter
9.5. Types of A/D converters
10. Clock Generators
10.1. Astable multivibrator
10.2. Monostable multivibrator
10.3. Schmitt trigger
BOOKS:
1. Digital Logic Design Principles by Norman Balabanian, Bradley Carlson, Wiley Student Edition
2. Digital Circuits & Design by D.P Kothari, J.S Dhillon, Pearson Education India
3. Digital Circuits and Design by Salivahanan and Arivazhagan, Vikas Publishing House, Noida
MEI-6103: DIGITAL SIGNAL PROCESSING (Common with M.E. Electrical Engineering – Instrumentation & Control)
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Signal and system
Engineering mathematics
OBJECTIVE
The objective of this course is to provide a thorough understanding and working knowledge of design,
implementation and analysis DSP systems.
LEARNING OUTCOMES
After the completion of this course, the students will be able to
Interpret, represent and process discrete/digital signals and sytems
Thorough understanding of frequency domain analysis of discrete time signals.
Ability to design & analyze DSP systems like FIR and IIR Filter etc.
Practical implementation issues such as computational complexity, hardware resource limitations as
well as cost of DSP systems or DSP Processors.
Understanding of spectral analysis of the signals
DETAILED CONTENTS
PART − A
1. Transformations:
1.1 Review of Z-Transform
1.2 Solution of Linear Difference Equations
1.3 Fourier series and Fourier Transform, Discrete Fourier Transform, Radix-2 FFT
1.4 Introduction to Radix-4 and Split Radix FFT
1.5 Discrete Cosine Transform, DCT as Orthogonal Transform, Walsh Transform, Hadamard Transform,
Wavelet Transform.
2. Digital Filters
2.1 Filter Design: Filter Specifications, Coefficient Calculation Methods- Window method, optimal
method, Frequency Sampling method.
2.2 Realization Structures, Finite Word Length Effects.
2.3 IIR Filter Design: Specifications, Coefficient Calculation methods- Pole-Zero Placement method,
Impulse Invariant method,
2.4 Matched Z-Transform method, Bilinear Z- Transformation method, Use of BZT and Classical Analog
Filters to design IIR Filters
2.5 Realization Structures, Finite Word Length Effects.
2.6 Qualitative and quantitative methods
3. Multirate Digital Signal Processing:
3.1 Sampling Rate Alteration Devices, Multirate Structures for sampling rate conversion
3.2 Multistage design of Decimator and Interpolator, The Polyphase Decomposition
3.3 Arbitrary Rate Sampling Rate Converter, Filter Banks, QMF banks
3.4 Multilevel Filter Banks, Sub-band Coding, Discrete Wavelet Transform.
4. Linear Prediction and Optimum Linear Filters:
4.1 Forward and Backward Linear Prediction
4.2 Properties of Linear Prediction-Error Filters
4.3 AR Lattice and ARMA Lattice-Ladder Filters
4.4 Wiener Filters for Filtering and Prediction.
PART − B
5. Adaptive Digital Filters:
5.1 Concepts of Adaptive Filtering
5.2 LMS Adaptive Algorithm, Recursive Least Squares Algorithm, Applications.
6. Power Spectrum Estimation:
7.8 Nonparametric methods for Power Spectrum Estimation
7.9 Bartlett method, Welch method, Blackman and Tukey method
7.10 Parametric methods for Power Spectrum Estimation, Yule- Walker method, Burg method
7.11 Unconstrained Least-Squares method, Sequential Estimation methods
7.12 Selection of AR Model Order, MA model for Power Spectrum Estimation,
7.13 ARMA model for Power Spectrum Estimation.
7. Monitoring DSP Chips:
7.1. Introduction to fixed point and floating point processors
7.2. ADSP21xx and TMS320Cxx- Architecture, Memory, Addressing Modes, Interrupts, Applications.
7.3. Comparison of ADSP21xx and TMS320Cxx series.
BOOKS:
1 “Digital Signal Processing: A Practical Approach”, by Ifeacher & Jervis, -Pearson Education.
2 “Digital Signal Processing: Principles, Algorithms and Applications”, by Proakis & Manolakis, 4e, -
Pearson Education
3 “Digital Signal Processing”, by S.K.Mitra, -Tata-Mcgraw Hill
4 “Discrete Time Signal Processing”, Oppenheim & Schafer. PHI
5 “Fundamentals of Digital Signal Processing using MATLAB”, by Robert J. Schilling & Sndra L.
Harris. -CENGAGE Learning
6 6. “Modern Digital Signal Processing”, Roberto Cristi.
7 “Modern Filter Theory”, by Johnson & Johnson
8 “Theory and application of Digital Signal Processing”, by Rabiner & Gold
9 “Digital Signal Processing”, Schuam’s Series.
“Digital Signal Processing”, by Salivahanan, Vallavaraj & Gnanapriya, - Tata-Mcgraw Hill.
MER-704: ROBOT MOTION PLANNING
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Engineering Mathematics and Basics of Robotics
OBJECTIVE
The objective of this course is to provide the student with some knowledge and analysis skills
associated with trajectory planning and robot control.
LEARNING OUTCOMES
After the completion of this course, the students will be able to
demonstrate knowledge of the relationship between mechanical structures of industrial robots and their
operational workspace characteristics
demonstrate an ability to generate joint trajectory for motion planning
demonstrate knowledge of robot controllers
DETAILED CONTENTS
PART − A
1. 1. Configuration Space
1.1 Specifying a Robot's Configuration
1.2 Obstacles and the Configuration Space
1.3 The Dimension of the Configuration Space
1.4 The Topology of the Configuration Space
1.5 Parameterizations of S O(3)
1.6 Example Configuration Spaces
1.7 Transforming Configuration and Velocity Representations
2. Motion Planning
2.1 Joint Space Planning
2.2 Cartesian Space Planning
2.3 Position and Orientation Trajectories
2.4 Point-to-Point Planning
2.5 Continuous Path Generation
PART − B
3. Trajectory Planning
4.1 Preliminaries
4.2 Decoupled Trajectory Planning
4.3 Direct Trajectory Planning
4. Robot Motion Control
5.1 Control Systems
5.2 Controllability
5.3 Simple Mechanical Control Systems
5.4 Motion Planning
BOOKS:
Latombe, J. C. (2012). Robot motion planning (Vol. 124). Springer Science & Business Media.
Hegde, G.S. (2009). Industrial Robotics, University Science Press.
MMT-608: DIGITAL MANUFACTURING (Common with M.E. Mechanical Engineering - Manufacturing Technology)
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Basics of manufacturing
OBJECTIVE
The objective of this course is to understand the transformation taking place, throughout the world, in
design and manufacturing of products through digital manufacturing – a shift from paper-based
processes to digital processes in the manufacturing industry.
LEARNING OUTCOMES
After the completion of this course, the students will be able to
Understand product design and development process, along with the manufacturing aspects.
Use parametric 3D CAD software tools in the correct manner for making geometric part models,
assemblies and automated drawings of mechanical components and assemblies.
Apply geometric transformations on the created wireframe, surface and solid models
DETAILED CONTENTS
PART − A
1. Introduction
1.1. Types of manufacturing systems and their characteristics
1.2. Computer aided Manufacturing (NC, CNC, DNC and adaptive control systems)
1.3. Computer Network architectures and protocols
1.4. Computer Integrated Manufacturing Systems
1.5. What makes a manufacturing process “digital”
2. CNC Machines
2.1. Constructional details
2.2. Design features
2.3. Safety devices
2.4. Part programming
3. Group Technology and Cellular Manufacturing
3.1. Parts classification and part coding – approaches and systems
3.2. Benefits of group technology
3.3. Cellular manufacturing-basics, layout considerations
3.4. Cell formation approaches and evaluation of cell designs
3.5. Planning and control in cellular manufacturing
3.6. Applications in Manufacturing
4. Computer Aided Process Planning
4.1. Role of Computer in Planning function
4.2. CAPP Approaches
4.3. Benefits of CAPP
4.4. Machinability Data Systems
4.5. Computer – Generated Time Standards
5. Computer Aided Quality Control
5.1. Computers in quality control
5.2. Contact and non-contact inspection methods
5.3. Computer aided testing
6. Flexible Manufacturing Systems
6.1. FMS and its Components
6.2. Layout considerations in FMS
6.3. Material Handling in FMS
PART − B
7. Reverse Engineering
7.1. Reverse Engineering – Principles and Technology
7.2. Contact type methods
7.3. Non-contact type methods
7.4. Applications in Product Manufacturing
8. Additive Manufacturing
8.1. Additive Manufacturing Processes
8.2. Steps in Additive Manufacturing
8.3. Materials used in Additive Manufacturing
8.4. Post processing
8.5. Challenges, Benefits and Applications
9. Cloud Based Manufacturing
9.1. Introduction to Cloud computing
9.2. Data Analytics in Manufacturing
9.3. Networked manufacturing
9.4. Industrial Internet of Things
9.5. Industry 4.0 Standard
9.6. Applications of Cloud based Manufacturing
BOOKS:
1. Groover M. P. and Zimmers E. W., “Computer Aided Design and Manufacturing”, Pearson Education,
New Delhi, 2003
2. Groover M. P., “Automation, Production Systems and Computer Aided Manufacturing”, Pearson
Education, New Delhi, 2015
3. P. Radhakrishnan, S. Subramanyan, V. Raju, “CAD/CAM/CIM”, New Age International, 2008
4. C.K. Chua,K.F. Leong,C.S. Lim, “Rapid Prototyping: Principles And Applications”, 3rd Edition,
World Scientific Publishing Co Pte Ltd, 2008
5. Alasdair Gilchrist, “Industry 4.0: The Industrial Internet of Things”, Apress, 2016
REFERENCE BOOKS
6. Alp Ustundag, Emre Cevikcan, “Industry 4.0: Managing The Digital Transformation”, Springer Series
in Advanced Manufacturing, 2017
7. Zude Zhou, Shane Shengquan Xie, Dejun Chen, Fundamentals of Digital Manufacturing Science”,
Springer Series in Advanced Manufacturing, 2011
MMT-655: OPTIMIZATION TECHNIQUES (Common with M.E. Mechanical Engineering - Manufacturing Technology)
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
Back ground in differential calculus and basic mathematics
OBJECTIVE
The objective of this course is to to formulate mathematical models and to understand solution
methods for real life optimal decision problems.
LEARNING OUTCOMES
After the completion of this course, the students will be able to
Cast engineering minima/maxima problems into optimization framework.
Learn efficient computational procedures to solve optimization problems.
Use MATLAB to implement important optimization methods.
DETAILED CONTENTS
PART − A
1. Numerical Techniques
1.1 Introduction to numerical techniques
1.2 Numerical differentiation and numerical integration
1.3 Eigen value problems
1.4 Newton-Raphson’s method
1.5 Computer based numerical analysis.
2. Introduction to optimization
2.1 Introduction and Engineering applications of optimization
2.2 Optimal Problem Formulation; Design – variables, Constraints, Objective function, Variable bounds.
2.3 Integer Programming
2.4 Geometric Programming
3. Single-variable Optimization
3.1 Optimality Criteria
3.2 Bracketing Methods – Exhaustive search and Bounding phase methods
3.3 Region-Elimination Methods-Interval halving method; Fibonacci search method, golden section
search method
3.4 Point-Estimation Method : Successive quadratic estimation method
3.5 Gradient-based Methods : Newton-Raphson method, Bisection method, Secant method, Cubic search
method
PART − B
4. Multivariable Optimization
4.1 Optimality Criteria
4.2 Unidirectional Search
4.3 Direct Search Methods: Simplex, Hooke-Jeeves pattern search and Powell’s conjugate direction
method.
4.4 Gradient-based Methods: Cauchy’s (steepest descent) method, Newton’s method, conjugate gradient
method, variable – metric method.
5. Constrained Optimization
5.1 Kuhn-Tucker Conditions
5.2 Transformation Methods: Penalty function method.
5.3 Sensitivity Analysis
5.4 Direct Search for Constrained Minimization : Variable elimination, Complex search and Random
search methods.
5.5 Linearized Search Techniques: Frank-Wolfe method, Cutting plane method, Feasible Direction
Method, Generalized Reduced Gradient Method, Gradient Projection Method.
BOOKS:
1. Sastry S.S, “Introductory methods of Numerical Analysis”, Prentice Hall of India, 2009
2. Rao S.S., “Engineering Optimization: Theory and Practices”, John Wiley and Sons, 4th Edition, 2009
3. Kambo N.S., “Mathematical Programming Techniques”, East West Press, 2009
4. Deb Kalyanmoy, “Optimization for Engineering Design: Algorithms and Examples”, Prentice Hall of
India, New Delhi, 2005
5. Belegundu,Chandragupta, “ Optimization Concepts and application in Engineering”, Pearson, 2003
MMT-657: RESEARCH METHODOLOGY (Common with M.E. Mechanical Engineering - Manufacturing Technology)
Maximum marks: 50 L P
Time Allowed: 3 hours 4 --
PRE REQUISITES
NIL
OBJECTIVE
The objective of this course is to introduce students to quantitative and qualitative methods for
conducting meaningful research
LEARNING OUTCOMES
After the completion of this course, the students will be able to
Understand the important concepts of research design, data collection, statistical and interpretative
analysis, and final report presentation
Learn systematic approach to research studies
Learn statistical data analysis techniques
Apply estimation & hypothesis technique for engineering problems
DETAILED CONTENTS
PART − A
1. Introduction Research Methodology
1.1 Definition of Research
1.2 Need of Research
1.3 Concept and steps of Research Methodology
1.4 Uses of Research Methodology, Research Techniques
2. Reviewing Literature
2.1 Need
2.2 Sources – Primary and Secondary
2.3 Purposes of Review
2.4 Scope of Review
2.5 Steps in conducting review
3. Identifying and defining research problem
3.1 Locating. Analyzing stating and evaluating problem
3.2 Generating different types of hypotheses
3.3 Hypothesis evaluation
4. Method of Research
4.1 Descriptive research design-survey
4.2 Case study
4.3 Content analysis
4.4 Ex-post Facto Research
4.5 Co-relational and Experimental Research
PART − B
5. Sampling Techniques
5.1 Concept of population and sample
5.2 Sampling techniques
5.2.1 Simple random sampling
5.2.2 Stratified random sampling
5.2.3 Systematic sampling
5.2.4 Cluster sampling
5.3 Quota sampling techniques
5.4 Determining size of sample
6. Procedure of data collection
6.1 Aspects of data collection
6.2 Techniques of data Collection
7. Statistical Methods of Analysis
7.1 Descriptive statistics
7.1.1 Meaning
7.1.2 Graphical representations
7.1.3 Mean, range and standard deviation
7.2 Characteristics and uses of normal curve.
8. Inferential Statistics
8.1 T-test
8.2 Chi-square tests
8.3 Correlation (rank difference and product moment)
8.4 ANOVA (one way)
8.5 Softwares for statistical analysis: SPSS, MATLAB
9. Procedure for writing a research proposal and report
9.1 Purpose, types and components of research proposal
9.2 Audiences and types of research reports
9.3 Format of Research report and journal
10. Case Studies on software tools used for research work
BOOKS:
1. C.R. Kothari, “Research Methodology – Methods and Techniques”, Wiley Eastern Ltd, 2009
2. Richard I. Levin and David S. Rubin, “Statistics for Management”, 7th
Edition, Pearson Education
India, 2012
3. K. N. Krishnaswamy, Appa Iyer Sivakumar and M. Mathirajan, “Management Research
Methodology: Integration of Methods and Techniques”, Pearson, 2006
4. S. P. Gupta, “Statistical Methods”, Sultan Chand & Sons, 2006
5. Ronald E. Walpole, Raymond H. Myers, Sharon L. Myers and Keying Ye, “Probability and Statistics
for Engineers and Scientists”, Pearson Edition, 2002
6. P. K. Gupta and D. S. Hira, “Problem in Operations Research”, S. Chand and Co., 2007
7. Bernand Ostle and Richard N. Mensing, “Statistics in Research”, 3rd
edition, Oxford & IBH Pub Co.,
1975
8. Hines, Montgomery, Goldsman and Borror, “Probability and Statistics in Engineering”, 4th
edition,
John Wiley & Sons, 2003