Embed Size (px)
Citation preview

ARTICLE IN PRESS
0378-4371/$ - se
doi:10.1016/j.ph
�CorrespondE-mail addr
Physica A 386 (2007) 513–530
www.elsevier.com/locate/physa
Synchronization in complex delayed dynamical networkswith nonsymmetric coupling
Jianshe Wu�, Licheng Jiao
Institute of Intelligent Information Processing, 132# Xidian University, 2# Taibai South Road, Xi’an 710071, China
Received 4 December 2006; received in revised form 25 June 2007
Available online 2 August 2007
Abstract
A new general complex delayed dynamical network model with nonsymmetric coupling is introduced, and then we
investigate its synchronization phenomena. Several synchronization criteria for delay-independent and delay-
dependent synchronization are provided which generalize some previous results. The matrix Jordan canonical
formalization method is used instead of the matrix diagonalization method, so in our synchronization criteria, the
coupling configuration matrix of the network does not required to be diagonalizable and may have complex eigenvalues.
Especially, we show clearly that the synchronizability of a delayed dynamical network is not always characterized by the
second-largest eigenvalue even though all the eigenvalues of the coupling configuration matrix are real. Furthermore, the
effects of time-delay on synchronizability of networks with unidirectional coupling are studied under some typical network
structures. The results are illustrated by delayed networks in which each node is a two-dimensional limit cycle oscillator
system consisting of a two-cell cellular neural network, numerical simulations show that these networks can realize
synchronization with smaller time-delay, and will lose synchronization when the time-delay increase larger than a
threshold.
r 2007 Elsevier B.V. All rights reserved.
PACS: 84.35.+i; 05.45.+b
Keywords: Complex network; Synchronization; Time-delay; Nonsymmetric coupling; Exponentially stability
1. Introduction
Complex network models are used to describe various interconnected systems of real world, such as theWorld Wide Web, food webs, electronic power grids, internet, etc. [1–4]. Since the complexity of real worldnetwork, there are various complex network models used to study the dynamics of coupled systems.Synchronization is a basic motion in coupled dynamical networks which has been carefully studied for a longtime [4–16]. Wang and Chen presented a uniform complex network model and investigated its synchronization
e front matter r 2007 Elsevier B.V. All rights reserved.
ysa.2007.07.052
ing author. Tel./fax: +86 29 88201023.
esses: [email protected] (J. Wu), [email protected] (L. Jiao).

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530514
in small-world and scale-free networks [7–10]. Latterly, Lu and Chen improved the model of Wang and Chenand characterized the synchronizability of small-world networks based on their model [11]. Li and Chenderived a sufficient condition for the global synchronization and asymptotical stability by introducing areference state with the Lyapunov stability theorem [12]. Time-delay in signal transition is a veryfamiliar phenomenon in nature, and the effects of time-delay on the dynamics of various coupled dynamicalsystems have been an interest for research in science and technology. Li and Chen extended the modelof Wang and Chen to a uniform model with the coupling delay, and derived some synchronization criteriafor both delay-independent and delay-dependent exponential stability of the synchronization state [13]. Zhouand Chen investigated the synchronization dynamics of a general model of complex delayed dynamicalnetworks as well as the effects of time-delays, and some criteria which ensure the networks to be delay-independent and delay-dependent exponentially synchronized are derived [14]. Lu and Chen introduced ageneral time-varying complex network model and derived some synchronization criteria for time-varyingcomplex network [15,16].
A commonly used approach to analyzing the synchronization phenomena of a complex dynamical networksis to linearize it at the synchronization state, thus the criteria for synchronization presented so far in mostliteratures require that the coupling configuration matrix of the network is symmetric or diagonalizable. Inthis special case, the coupling configuration matrix has only real eigenvalues. In fact, the coupling betweennodes of many real-world networks is nonsymmetric, such as the food web [17], metabolic network [18],World-Wide-Web [19], epidemic networks [20], document citation networks [21]. Furthermore, the coupling insome real-world networks may be unidirectional, such as the AIDS spreading network. Most of thenonsymmetric matrices have complex conjugate eigenvalues, even though all the eigenvalues of anonsymmetric matrix are real, it may not be diagonalizable [22]. Recently, there are some researches onsynchronization of complex networks with nonsymmetric coupling: without assuming symmetry andirreducibility, some criteria for synchronization in networks and delayed networks were presented in Refs.[23,24], respectively; and some adaptive synchronization criteria for networks with uncertain coupling arereported in Ref. [25].
In this paper, a new general delayed dynamical complex network model with nonsymmetric coupling isintroduced, and then we investigate its synchronization phenomena. The matrix canonical formalizationmethod is used instead of the matrix diagonalization method. Criteria for delay-independent and delay-dependent synchronization are derived, and the synchronization criteria obtained in this paper do not requirethe coupling configuration matrix to be diagonalizable, and made some previous results a special case.Especially, since the effect of time-delay, we show clearly that the synchronizability of a delayed dynamicalnetwork is not always characterized by the second-largest eigenvalue of the coupling configuration matrix eventhough all its eigenvalues are real.
This paper is organized as follows. In Section 2, a general delayed dynamical complex network model withnonsymmetric coupling is introduced, and some mathematical definitions and lemmas are given. The mainresults of this paper are given in Section 3, which contains some general criterion for synchronization, andsome criteria for delay-independent and delay-dependent synchronization in the delayed networks. In Section4, the effects of time-delay on synchronizability of networks with unidirectional coupling under some differenttypical topological structures are analyzed. Illustrating networks and some simulation results are also given inSection 4. Section 5 is the conclusion of this paper.
Now, we list some mathematical notations used in this paper. We denote a matrix A is an n� n complex(real) matrix by A 2MnðCÞ ðA 2MnðRÞÞ. We denote the positive (nonnegative) definiteness of A by A �
0 ðAk0Þ and the negative (nonpositive) definiteness of A by A � 0 ðA%0Þ. A � B means A� B is a positivedefinite matrix. The vector norm used will be kxk ¼ ðx�xÞ1=2. lR
i and lIi denote the real part and imaginary part
of a complex number li, respectively. _wRil ðtÞ ¼ dwR
il ðtÞ=dt, and _wIilðtÞ ¼ dwI
ilðtÞ=dt, where wilðtÞ is a complexvariable. The Hermitian part of a square matrix P is denoted as PH ¼ 1
2ðP� þ PÞ, where P 2MnðCÞ; and the
symmetric part of a square matrix is denoted as DS ¼ 12ðDT þDÞ, where D 2MnðRÞ. The n� n identity matrix
is denoted by In. The set of all l 2 C that are eigenvalues of G 2MnðCÞ is called the spectrum of G and isdenoted as sðGÞ. The spectral radius of G is the nonnegative real numberrðGÞ ¼ maxfjlj : l 2 sðGÞg. For amatrix P 2MnðCÞ, lPmin and lPmax are the minimum and maximum eigenvalues of P, respectively, ifsðPÞ � R.

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530 515
2. Network model and mathematic preliminaries
2.1. Delayed dynamical network model with nonsymmetric coupling
We consider a delayed dynamical network consisting of N linearly and diffusively coupled identical nodes.The state equations of the entire network are described by
_xiðtÞ ¼ f ðxiðtÞÞ þXN
j¼1
gijAxjðt� tÞ; i ¼ 1; . . . ;N, (1)
where xiðtÞ ¼ ðxi1ðtÞ;xi2ðtÞ; . . . ;xinðtÞÞT2 Rn is the state variable of the ith node. A 2MnðRÞ is the
inner-coupling matrix which describe the individual coupling between two connected nodes of thenetwork, tX0is the coupling time-delay, f : Rn ! Rn is a vector-valued function describe the dynamicsof an individual node, gij 2 R describe the time-invariant coupling strength from node j to node iðjaiÞ, gijX0,and
gii ¼ �XN
j¼1jai
gij ; i ¼ 1; . . . ;N, (2)
which imply that the row sum of matrix G ¼ ðgijÞ 2MN ðRÞ are all zero. Obviously, the coupling configurationof the matrix G contains both coupling topological structure and strength information in the network. Notethat the coupling configuration matrix G in our network model is not assumed to be symmetric or irreducible,and it may have complex eigenvalues. So the network (1) is a generalization of the model discussed inRefs. [13,14].
Network (1) can be equivalently expressed as (3) by using Kronecker product [26–28],
_X ðtÞ ¼ f ðX ðtÞÞ þ ðG � AÞX ðt� tÞ, (3)
where X ðtÞ ¼ ðx1ðtÞ; . . . ;xN ðtÞÞT2 RnN , X ðt� tÞ ¼ ðx1ðt� tÞ; . . . ;xN ðt� tÞÞT 2 RnN , f ðX ðtÞÞ ¼ ðf ðx1ðtÞÞ; . . . ;
f ðxNðtÞÞÞT2 RnN , G � A 2MnN ðRÞ denotes the Kronecker product of matrices G and A. It is convenient to
use (3) than (1) sometimes. From the Gersgorin discs theorem [22], the real parts of all the eigenvalues of G areless than or equal to zero. Since the row sum of G are all zero, zero is always an eigenvalue of G correspondingto eigenvector ð1; 1; . . . ; 1ÞT. In this paper, we always assume that zero is an eigenvalue of G with multiplicityone. From Lemma 2 in Ref. [26], zero is an eigenvalue of G with multiplicity one if it is irreducible. Forsimplicity, we always assume l1 ¼ 0, if the coupling configuration matrix have k different eigenvalues and allof them taken to be real, we denote them as l24l34 4lk.
2.2. Mathematic preliminaries
Definition 1 (Synchronization). Let D0 denotes an open set in the state space. If from any initial pointT 0
X ðt0Þ ¼ ðx1ðt0Þ; . . . ;xNðt0ÞÞ 2 D , there is kxiðt0Þ � sðtÞk ! 0 as t!1, i ¼ 1; . . . ;N, the delayed autono-mous network (1) is said to realize synchronization. The open set D0 is called the region of synchrony, andSðtÞ ¼ ðsðtÞ; . . . ; sðtÞÞT is called the synchronization state of the network.
Obviously, if network (1) realized synchronization, then x1ðtÞ ¼ x2ðtÞ ¼ xN ðtÞ ¼ sðtÞ, from (2) one hasPNj¼1gijAsðtÞ ¼ 0, in turn from (1) to get
_sðtÞ ¼ f ðsðtÞÞ, (4)
which means sðtÞ is a solution of system _xðtÞ ¼ f ðxðtÞÞ. The authors in Ref. [13] include Eq. (4) intheir definition of synchronization, while the definition of synchronization in Ref. [14] does not requirethat sðtÞ is a solution of system _xðtÞ ¼ f ðxðtÞÞ, in fact, they are equivalent. sðtÞ can be an equilibriumpoint, a limit cycle, an aperiodic orbit, or a chaotic orbit, such as the chaotic Lorenz, Chen, andLu attractors [29].

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530516
When the network (1) realized synchronization, the synchronization state SðtÞ is asymptotically stable in thestate space. On the other hand, if the synchronization state SðtÞ is asymptotically stable, then the delayednetwork (1) will realize synchronization by Definition 1.
Definition 2. The synchronization state SðtÞ of the delayed network (1) is said to be delay-independentasymptotically stable, if the synchronization state SðtÞ is asymptotically stable for any fixed time-delayt 2 ½0;1Þ. And the delayed network is then called a delay-independent network.
Definition 3. The synchronization state SðtÞ of the delayed network (1) is said to be delay-dependentasymptotically stable, if the synchronization state SðtÞ is asymptotically stable for any fixed time-delayt 2 ½0; h, h40. And the delayed network is then called a delay-dependent network.
Lemma 1 (Horn and Johnson [22]). Let G 2MnðCÞ be a given complex matrix. There is a nonsingular matrix
F 2MnðCÞ such that
G ¼ F
Jn1ðl1Þ 0
Jn2ðl2Þ
. ..
0 JnkðlkÞ
2666664
3777775F�1 ¼ FJF�1 (5)
and n1 þ n2 þ þ nk ¼ N. The Jordan matrix J of G is unique up to permutation of the diagonal Jordan blocks.The eigenvalues li, i ¼ 1; . . . ; k, are not necessarily distinct. If G is a real matrix with only real eigenvalues
(sðGÞ � RÞ, then the similarity matrix F can be taken to be real. JniðliÞ is the Jordan blocks:
JniðliÞ ¼
li 1 0
li. ..
. ..
1
0 li
0BBBBB@
1CCCCCA; i ¼ 1; . . . ; k. (6)
Obviously, if li is an eigenvalue with multiplicity one ðni ¼ 1Þ, then the corresponding Jordan block J1ðliÞ ¼ li.
Lemma 2. For any two n-dimensional complex vectors Y and Z, and a positive definite matrix Q 2MnðCÞ,
Y �Z þ Z�YpY �QY þ Z�Q�1Z. (7)
In particular, if Q ¼ In, Lemma 2 reduced to
Y �Z þ Z�YpY �Y þ Z�Z, (8)
else if x and y are real vectors and Q 2MnðRÞ, then
xTyp12xTQyþ 1
2xTQ�1y. (9)
Proof. Since a positive definite matrix is Hermitian, from the spectral theorem for Hermitian matrices [22],there is a unitary matrix U, such that Q ¼ U�GU , G ¼ diagðl1; . . . ; lnÞ is a diagonal matrix with its entries areeigenvalues of Q. Then,
0pðffiffiffiffiGp
UY �ffiffiffiffiffiffiffiffiG�1
pUZÞ�ð
ffiffiffiffiGp
UY �ffiffiffiffiffiffiffiffiG�1
pUZÞ
¼ Y �U�GUY þ Z�U�G�1UZ � Y �U�ffiffiffiffiGp ffiffiffiffiffiffiffiffi
G�1p
UZ � Z�U�ffiffiffiffiffiffiffiffiG�1
p ffiffiffiffiGp
UY
¼ Y �QY þ Z�Q�1Z � Y �Z � Z�Y , ð10Þ
thus, obtain the result. &

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530 517
Definition 4 (Zhou and Chen [14]). Function kðz1; z2Þ is defined as
kðz1; z2Þ ¼
1 if z140 or z1 ¼ 0 and z240;
0 if z1 ¼ z2 ¼ 0;
�1 if z1o0 or z1 ¼ 0 and z2o0;
8><>: (11)
then, kðuðtÞ; _uðtÞÞuðtÞ ¼ juðtÞj, djuðtÞj=dt ¼ kðuðtÞ; _uðtÞÞ _uðtÞ.
Lemma 3 (Zhou and Chen [14]). Let V ðtÞ40 for t 2 R; t 2 ½0;1Þ and t0 2 R. Suppose that
_V ðtÞp� aV ðtÞ þ b supt�tpapt
V ðaÞ (12)
for all t4t0. If a4b40, there exist two constants g40 and k40, such that
V ðtÞpke�gðt�t0Þ; t4t0.
Lemma 4. Suppose P 2MnðCÞ is a positive definite matrix, and w 2 Cn, then
lPminw�wpw�PwplPmaxw�w. (13)
Proof. Since a positive definite matrix is Hermitian, from the spectral theorem for Hermitian matrices [22],there is a unitary matrix U and a real diagonal matrix L, such thatP ¼ U�LU , where the entries of L areeigenvalues of P, then
w�Pw ¼ ðUwÞ�LUw
plPmaxw�U�Uw ¼ lPmaxw�w.
Similarly, one has w�PwXlPminw�w. The proof is completed. &
3. Synchronization in delayed dynamical networks
Since the coupling configuration matrix G in our network model is not symmetric and may have complexeigenvalues, it should be treated as a complex matrix in the process of transformation.
3.1. General synchronization analysis
Theorem 1. Suppose f ðxðtÞÞ is continuously differentiable at sðtÞ 2 Rn, then the synchronization state SðtÞ of the
delayed network (1) is exponentially stable if the following k � 1 ni-node time-varying systems are exponentially
stable about their zero solutions:
_W ðtÞ ¼ ðIni�Df ðsðtÞÞÞW ðtÞ þ ðJni
ðliÞ � AÞW ðt� tÞ; i ¼ 2; . . . ; k, (14)
where 2pkpN, n2 þ n3 þ þ nk ¼ N � 1, W ¼ ðw1; . . . ;wj ; . . . ;wniÞT2 Cnni , wj 2 Cn, Df ðsðtÞÞ is the
Jacobian matrix of f ðxðtÞÞ at sðtÞ, Ini�Df ðsðtÞÞ denotes the Kronecker product of matrices Ini
and Df ðsðtÞÞ.JniðliÞ are the Jordan blocks of the coupling configuration matrix G.
Proof. To investigate the stability of the synchronous solution SðtÞ, let
ZiðtÞ ¼ xiðtÞ � sðtÞ; i ¼ 1; 2; . . . ;N, (15)
ZiðtÞ is the error between xiðtÞ and sðtÞ. Substituting (15) into (1) and considering (4), one has
_ZiðtÞ ¼ f ðsðtÞ þ ZiðtÞÞ � f ðsðtÞÞ þXN
j¼1
gijAZjðt� tÞ
¼ Df ðsðtÞÞZjðtÞ þXN
j¼1
gijAZjðt� tÞ; i ¼ 1; 2; . . . ;N. ð16Þ

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530518
By using Kronecker product, one can rewrite (16) as
_ZðtÞ ¼ ðIN �Df ðsðtÞÞ þ G � AÞZðt� tÞ, (17)
where ZðtÞ ¼ ðZ1ðtÞ; . . . ; ZnðtÞÞTis the error variable between X ðtÞ and SðtÞ. From Lemma 1 there is a non-
singular matrix F 2 CN�N such that
G ¼ FJF�1. (18)
Let
ZðtÞ ¼ ðF� InÞyðtÞ, (19)
then
_ZðtÞ ¼ ðF� InÞ_yðtÞ. (20)
Substituting (18), (19), and (20) into (17), by some algebra, one has
_yðtÞ ¼ ðIN �Df ðsðtÞÞ þ J � AÞyðt� tÞ, (21)
where yðtÞ ¼ ðy1ðtÞ; . . . ; yNðtÞÞT2 CnN , yiðtÞ 2 Cn, i ¼ 1; 2; . . . ;N. From the Lyapunov linearization method for
non-autonomous system [30], the synchronization state SðtÞ of network (1) is exponentially stable if system(21) is exponentially stable about its zero solution. Considering the special form of J given in (5) and (6),system (21) can be easily transformed to (14) equivalently. The proof is thus completed. &
Remark 1. If the Jordan matrix J of the coupling configuration matrix G happen to be diagonal, and all theeigenvalues of G taken to be real, it is a special case that has been discussed in Refs. [13,14].
Theorem 2. Suppose f ðxðtÞÞ is continuously differentiable at sðtÞ 2 Rn, and the coupling configuration matrix G
has k different eigenvalues, then the synchronization state SðtÞ of the delayed network (1) is exponentially stable if
the following k � 1 individual time-varying systems are exponentially stable about their zero solutions:
_wðtÞ ¼ Df ðsðtÞÞwðtÞ þ liAwðt� tÞ; i ¼ 2; . . . ; k, (22)
where 2pkpN, wðtÞ 2 Cn, and li 2 sðGÞ.
Proof. We will show that the exponential stability of the zero solution of the ith ni-node time-varying systemin (14) is equivalent to that of the corresponding ith individual time-varying system in (22). Suppose ni ¼ 2,then the ith two-node system in (14) can be described by the following two equations with W ¼ ðw1;w2Þ
T:
_w1ðtÞ ¼ Df ðsðtÞÞw1ðtÞ þ liAw1ðt� tÞ þ Aw2ðt� tÞ, (23)
_w2ðtÞ ¼ Df ðsðtÞÞw2ðtÞ þ liAw2ðt� tÞ. (24)
Firstly, it is obvious that, if the zero solution of the time-varying system (24) is exponentially stable, then thezero solution of the ith individual time-varying system in (22) is exponentially stable. Secondly, if the zerosolution of the ith equation in (22) is exponentially stable, then the zero solution of (24) is exponentially stable,in turn it follows that the zero solution of (23) is exponentially stable. The case for ni42 can be proved thesame way and omitted here. From Theorem 1, the proof is thus completed. &
Remark 2. By Theorem 2, to estimate whether it can realize synchronization exponentially in the delayeddynamical network (1), one only need to find out all the different eigenvalues of the coupling configurationmatrix G no matter whether it is symmetric or diagonalizable, and estimate the exponential stability of thek � 1 individual time-varying systems in (22). So, Theorem 2 is a generalization of the results in Refs. [13,14].
3.2. Delay-independent synchronization analysis
By defining a Lyapunov–Krasovskii function and using Lemma 2, a sufficient condition ensuring theexponential stability of the synchronization state SðtÞ of the delayed network (1) is obtained.

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530 519
Theorem 3. Suppose f ðxðtÞÞ is continuously differentiable at sðtÞ 2 Rn. If there exist two n� n positive definite
matrix, P;Q � 0, such that
PDf ðsðtÞÞ þDf ðsðtÞÞTPþQþ r2ðGÞPAQ�1ATP%� eIn, (25)
where rðGÞ is the spectral radius of G, e is a positive number, then the synchronization state SðtÞ of the delayed
network (1) is delay-independent exponentially stable.
Proof. Define a Lyapunov–Krasovskii function as follows:
V ðtÞ ¼ w�ðtÞPwðtÞ þ
Z t
t�tw�ðaÞQwðaÞda, (26)
where wðtÞ 2 Cn. By using Lemmas 2 and 4, the derivative of V ðtÞ along the trajectory of the ith individualtime-varying system in (22) is
_V ðtÞ ¼ w�ðtÞðPDf ðsðtÞÞ þDf ðsðtÞÞTPÞwðtÞ þ w�ðtÞPliAwðt� tÞ þ wðt� tÞ�l�i ATPwðtÞ
þ w�ðtÞQwðtÞ � w�ðt� tÞQwðt� tÞ
pw�ðtÞðPDf ðsðtÞÞ þDf ðsðtÞÞTPþQþ jlij2PAQ�1ATPÞwðtÞ
p� ekwðtÞk2,
p�e
lPmax þ tlQmaxV ðtÞ; i ¼ 2; . . . ; k. ð27Þ
From the Lyapunov’s theorem for local stability [30] and Theorem 2, the proof is thus completed. &
In particular, if P ¼ Q ¼ In, Theorem 3 reduced to the following simple and useful corollary.
Corollary 1. For the delayed dynamical network (1), if
Df ðsðtÞÞ þDf ðsðtÞÞT þ r2ðGÞAAT%� ðeþ 1ÞIn, (28)
where e is a positive number, then the synchronization state SðtÞ is delay-independent exponentially stable. From
Lemma 4, sufficient condition (28) can be further written as
Df ðsðtÞÞS þ1
2r2ðGÞrðAATÞ%�
ðeþ 1Þ
2In.
Remark 3. Corollary 1 means that smaller spectral radius of G and AAT easily implies delay-independentsynchronization.
3.3. Delay-dependent synchronization analysis
Compared to the delay-independent networks, there are networks which can realize synchronization onlywhen the time-delays less than a threshold.
Theorem 4. Suppose f ðxðtÞÞ is continuously differentiable at sðtÞ 2 Rn, P;Q 2MnðCÞ are positive definite
matrices. If there exist a positive constant b, such that
h2lPmax
lPminr2ðGÞl
ðPAÞ�Q�1PAmaxðlDf ðsðtÞÞTDf ðsðtÞÞmax þ r2ðGÞlATAmaxÞ þlQmax
2ob, (29)
and
ðPDf ðsðtÞÞ þ liPAÞH%� bIn; i ¼ 2; . . . ; k, (30)
where li 2 sðGÞ, then the synchronization state of the delayed network (1) is delay-dependent exponentially stable
for any fixed time-delay t 2 ½0; h.
Proof. Define a Lyapunov function as
ViðtÞ ¼ w�i ðtÞPwiðtÞ; i ¼ 2; . . . ; k. (31)

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530520
Rewrite the ith equation of (22) as
_wiðtÞ ¼ ½Df ðsðtÞÞ þ liAwiðtÞ � liA
Z t
t�t_wiðaÞda; i ¼ 2; . . . ; k. (32)
Thus, by using Lemmas 2 and 4, the derivative of ViðtÞ along trajectory of (32) is
_ViðtÞ ¼ w�i ðtÞ ðDf ðsðtÞÞ þ liAÞ�Pþ PðDf ðsðtÞÞ þ liAÞð ÞwiðtÞ
� PliA
Z t
t�t_wiðaÞda
� ��wiðtÞ � w�i ðtÞ PliA
Z t
t�t_wiðaÞda
� �p2w�i ðtÞðPðDf ðsðtÞÞ þ liAÞÞ
HwiðtÞ
þ liPA
Z t
t�t_wiðaÞda
� ��Q�1 liPA
Z t
t�t_wiðaÞda
� �þ w�i ðtÞQwiðtÞ
pð�2bþ lQmaxÞw�i ðtÞwiðtÞ þ jlij
2
Z t
t�t_wiðaÞda
� ��ðPAÞ�Q�1PA
Z t
t�t_wiðaÞda
� �
pð�2bþ lQmaxÞw�i ðtÞwiðtÞ þ lij j
2lðPAÞ�Q�1PAmax
Z t
t�t_wiðaÞda
� �� Z t
t�t_wiðaÞda
� �
¼ ð�2bþ lQmaxÞw�i ðtÞwiðtÞ þ jlij
2lðPAÞ�Q�1PAmax
Z t
t�t
Z t
t�tð _wiðaÞÞ
� _wiðgÞda dg� �
pð�2bþ lQmaxÞw�i ðtÞwiðtÞ þ jlij
2lðPAÞ�Q�1PAmaxt
2 supt�tpapt
ðð _wiðaÞÞ� _wiðaÞÞ
pð�2bþ lQmaxÞw�i ðtÞwiðtÞ þ r2ðGÞl
ðPAÞ�Q�1PAmaxh2
� supt�tpapt
ððDf ðsðaÞÞwðaÞ þ liAwða� tÞÞ�ðDf ðsðaÞÞwðaÞ þ liAwða� tÞÞÞ
pð�2bþ lQmaxÞw�i ðtÞwiðtÞ þ r2ðGÞl
ðPAÞ�Q�1PAmaxh2
�ð2lDf ðsðtÞÞTDf ðsðtÞÞmax þ 2r2ðGÞlATAmaxÞ sup
t�2tpapt
ðw�i ðaÞwiðaÞÞ
p1
lPmaxð�2bþ lQmaxÞViðtÞ
þ2h2
lPminr2ðGÞl
ðPAÞ�Q�1PAmaxðlDf ðsðtÞÞTDf ðsðtÞÞmax þ r2ðGÞlATAmaxÞ supt�2tpapt
ðViðaÞÞ; i ¼ 2; . . . ; k.
From Lemma 3, ViðtÞ ði ¼ 2; . . . ; kÞ are exponentially approach to zero, therefore, the k � 1 individual time-varying systems in (22) are exponentially stable about their zero solutions. From Theorem 2, the proof iscompleted. &
In the following of this paper, sometimes we denote the Jacobian matrix of f ðxðtÞÞ at sðtÞ as
Df ðsðtÞÞ ¼ ðsmlðtÞÞn�n
where smlðtÞ are continuous or piecewise continuous functions.
Theorem 5. Suppose f ðxðtÞÞ is continuously differentiable at sðtÞ 2 Rn. If there exist a positive matrix
P ¼ ðpilÞðk�1Þ�n, and a positive vector b ¼ ðb2; b3; . . . ;bkÞT, such that
pilðsllðtÞ þ lRi allÞ þ
Xn
m¼1mal
pimðsmlðtÞ þ lRi amlÞ
��������������
þXn
m¼1
pim lIi aml
�� ��þ hðjlRi j þ jl
Ii jÞXn
m¼1
pimjaml jXn
m¼1
jslmðtÞjp� bi; i ¼ 2; . . . ; k; l ¼ 1; . . . ; n, ð33Þ

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530 521
and
hpimaxðjlRi j þ jl
Ii jÞ
2
pimin
Xn
m¼1
jalmjXn
m¼1
pimjaml jobi; i ¼ 2; . . . ; k; l ¼ 1; . . . ; n, (34)
where pimin ¼ minfpi1; . . . ; ping, pimax ¼ maxfpi1; . . . ; ping, and li 2 sðGÞ, then the synchronization state SðtÞ of
the delayed dynamical network (1) is delay-dependent exponentially stable for any fixed time-delay t 2 ½0; h.
Proof. For i ¼ 2; . . . ; k, from (32) one has
_wilðtÞ ¼Xn
m¼1
ðslmðtÞ þ lialmÞwimðtÞ � li
Xn
m¼1
Z t
t�talm _wimðaÞda; l ¼ 1; . . . ; n. (35)
Since wilðtÞ are complex variables, Eq. (35) can be equivalently written as (36) and (37)
_wRil ðtÞ ¼
Xn
m¼1
ðslmðtÞ þ lRi almÞw
RimðtÞ �
Xn
m¼1
lIi almwI
imðtÞ
� lRi
Xn
m¼1
Z t
t�talmwR
imðaÞdaþ lIi
Xn
m¼1
Z t
t�talmwI
imðaÞda; l ¼ 1; . . . ; n, ð36Þ
_wIilðtÞ ¼
Xn
m¼1
ðslmðtÞ þ lRi almÞw
IimðtÞ þ
Xn
m¼1
lIi almwR
imðtÞ
� lRi
Xn
m¼1
Z t
t�talmwI
imðaÞda� lIi
Xn
m¼1
Z t
t�talmwR
imðaÞda; l ¼ 1; . . . ; n. ð37Þ
Similarly, from (22) one has
_wRil ðtÞ ¼
Xn
m¼1
slmðtÞwRimðtÞ þ lR
i
Xn
m¼1
almwRimðt� tÞ
� lIi
Xn
m¼1
almwIimðt� tÞ; i ¼ 2; . . . ; k; l ¼ 1; . . . ; n, ð38Þ
_wIilðtÞ ¼
Xn
m¼1
slmðtÞwIimðtÞ þ lR
i
Xn
m¼1
almwIimðt� tÞ
þ lIi
Xn
m¼1
almwRimðt� tÞ; i ¼ 2; . . . ; k; l ¼ 1; . . . ; n. ð39Þ
From (38) and (39), it is easy to obtain
j _wRil ðtÞ � _wI
ilðtÞjpXn
m¼1
slmðtÞðwRimðtÞ � wI
imðtÞÞ
����������þ jlR
i jXn
m¼1
almj j supt�tpapt
jwRimðaÞ � wI
imðaÞj
þ jlIi jXn
m¼1
jalmj supt�tpapt
jwRimðaÞ � wI
imðaÞj
pXn
m¼1
jslmðtÞjðjwRimðtÞj þ jw
IimðtÞjÞ
þ ðjlRi j þ jl
Ii jÞXn
m¼1
jalmj supt�tpapt
ðjwRimðaÞj þ jw
IimðaÞjÞ. ð40Þ

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530522
Define Lyapunov functions as
ViðtÞ ¼Xn
l¼1
pilðjwRil ðtÞj þ jw
IilðtÞjÞ; i ¼ 2; . . . ; k, (41)
then from Definition 4 and considering (36), (37), (40), and (41), the derivative of V iðtÞ along the trajectoryof (35) is
dV iðtÞ
dt¼Xn
l¼1
pil
dðjwRil ðtÞj þ jw
IilðtÞjÞ
dt
¼Xn
l¼1
pilkðwRil ðtÞ; _w
Ril ðtÞÞ _w
Ril ðtÞ þ
Xn
l¼1
pilkðwIilðtÞ; _w
IilðtÞÞ _w
IilðtÞ
pXn
l¼1
pilðsllðtÞ þ lRi allÞjw
Ril ðtÞj þ
Xn
m¼1mal
pimðsmlðtÞ þ lRi amlÞ
��������������jw
Ril ðtÞj
8><>:
�Xn
m¼1
pimjlIi amlw
IilðtÞj þ
Xn
m¼1
pimjlIi amlw
Ril ðtÞj
þ pilðsllðtÞ þ lRi allÞjw
IilðtÞj þ
Xn
m¼1mal
pimðsmlðtÞ þ lRi amlÞ
��������������jw
IilðtÞj
�tjlRi jXn
m¼1
pimjaml j supt�tpapt
j _wRil ðaÞ � _wI
ilðaÞj
þ tjlIi jXn
m¼1
pimjaml j supt�tpapt
j _wRil ðaÞ � _wI
ilðaÞj
9>=>;
p�bi
pimax
V iðtÞ þhðjlR
i j þ jlIi jÞ
2
pimin
Xn
m¼1
jalmjXn
m¼1
pimjaml j supt�2tpapt
V iðaÞ; i ¼ 2; . . . ; k.
From Lemma 3, ViðtÞ ! 0 exponentially, thus wilðtÞ ! 0 exponentially for all i ¼ 2; . . . ; k and l ¼ 1; . . . ; n.Then from Theorem 2, the proof is completed. &
Remark 4. Obviously, it is easy to obtain an allowable bound of time-delay for synchronization in term ofexplicit expression from Theorems 4 or 5.
Theorem 5 is somewhat complicated in practical use; one can obtain the following simpler corollary whichcan be used in some special cases.
Corollary 2. If there exist nþ 1 positive numbers p1; p2; . . . ; pn and b, such that
plðsllðtÞ þ lRi allÞ þ
Xn
m¼1mal
pmðsmlðtÞ þ lRi amlÞ
��������������
þXn
m¼1
pmjlIi aml j þ hðjlR
i j þ jlIi jÞXn
m¼1
pmjaml jXn
m¼1
jslmðtÞjp� b; i ¼ 2; . . . ; k; l ¼ 1; . . . ; n, ð42Þ
and
hpmaxðjlRi j þ jl
Ii jÞ
2
pmin
Xn
m¼1
jalmjXn
m¼1
pmjaml job; i ¼ 2; . . . ; k; l ¼ 1; . . . ; n, (43)

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530 523
where pmin ¼ minfp1; . . . ; png, pmax ¼ maxfp1; . . . ; png, and li 2 sðGÞ, then the synchronization state SðtÞ of the
delayed network (1) is delay-dependent exponentially stable for any fixed time-delay t 2 ½0; h.
Corollary 2 is really a special case of Theorem 5, where each row of the matrix P are all equal to ðp1; . . . ; pnÞ,and b2 ¼ b3 ¼ ¼ bk ¼ b.
In particular, if G has only real eigenvalues (negative numbers except forl1 ¼ 0Þ; one can obtain thefollowing useful corollary from Corollary 2.
Corollary 3. If li 2 sðGÞ � R, and there exist n positive numbers p1; p2; . . . ; pn, such that
ho mini¼2;...;kl¼1;...;n
Hðli; lÞ, (44)
where
Hðli; lÞ ¼plðsllðtÞ þ liallÞ þ j
Pnm¼1mal
pmðsmlðtÞ þ liamlÞj
li
Pnm¼1pmjaml j
Pnm¼1jslmðtÞj � ðpmaxl
2i =pminÞ
Pnm¼1jalmj
Pnm¼1pmjaml j
, (45)
then the synchronization state SðtÞ of the delayed network (1) is delay-dependent exponentially stable for any
fixed time-delay t 2 ½0; h.
Definition 5. The synchronizability of the delayed dynamical network (1) is said to be determined by lp ifHðlp; lÞ ¼ mini¼2;...;k
l¼1;...;nHðli; lÞ. The definition in case of which the coupling configuration matrix has complex
eigenvalues can be given similarly.
Remark 5. It can be seen clearly from Theorem 5 and all its corollaries that, unlike the non-delayed networkswith symmetric coupling, whose synchronizability is characterized by the second-largest eigenvalue of itscoupling configuration matrix [7–11], for a delayed network with nonsymmetric or symmetric coupling, itssynchronizability is not always characterized by the second-largest eigenvalue of its coupling configurationmatrix even though all the eigenvalues are real.
4. Synchronizability analysis of unidirectional coupled networks with different structures
In this section, we analyze the effect of time-delay on the synchronizability of delayed networks withunidirectional coupling under different topological structures by using the theoretical results above.Simulations are also done to verify the results by using delayed networks in which each node is a two-dimensional oscillator system consisting of a two-cell cellular neural network. The state equations of the N
−2 −1 0 1 2−1.5
−1
−0.5
0
0.5
1
1.5
x (1)
x (
2)
Fig. 1. Limit cycle in the two-cell CNN with a11 ¼ a22 ¼ 1:2, a12 ¼ 0:5, a21 ¼ �0:5.

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530524
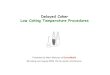
nodes are described by (46) and (47) [31,32], where the parameters are a11 ¼ a22 ¼ 1:2, a12 ¼ 0:5, anda21 ¼ �0:5. Fig. 1 shows that there is a limit cycle in the state space of the two-cell cellular neural network(CNN):
_xi1 ¼ �xi1 þ a11yi1 þ a12yi2;
_xi2 ¼ �xi2 þ a21yi1 þ a22yi2;
(i ¼ 1; . . . ;N, (46)
yilðxilÞ ¼12ðjxil þ 1j � jxil þ 1jÞ; l ¼ 1; 2. (47)
Obviously, the Jacobian matrix of f ðxðtÞÞ at sðtÞ in this system satisfy
Df ðsðtÞÞ ¼s11 ¼ �1 or 0:2 s12 ¼ 0:5
s21 ¼ �0:5 s22 ¼ �1 or 0:2
" #.
As analyzed above, the synchronizability of the delayed network (1) has relation with the inner-couplingmatrix A. In order to compare the synchronizability of delayed networks with different structures, we alwaysassume A ¼ In, p1 ¼ p2 ¼ ¼ pn ¼ 1 in Corollaries 2 and 3, and all the coupling strength from node j tonode i are 1 (iajÞ in this section. All simulations are done using networks of 50 nodes with different structures.
4.1. Global unidirectional coupling
The coupling configuration matrix of the globally unidirectional coupled network with N nodes is
Ggu ¼
�ðN � 1Þ 1 1
0 �ðN � 2Þ 1 1
..
.0 . .
. . .. ..
.
..
. ... . .
.�1 1
0 0 0
266666664
377777775, (48)
which has only real eigenvalues: l1 ¼ 0, l2 ¼ �1, l3 ¼ �2; . . . ; lN ¼ �ðN � 1Þ. From Corollary 3, one canobtain a sufficient condition for synchronization as follows:
tpho minl¼1;...;ni¼2;...;N
H1ðli; lÞ ¼ðsllðtÞ þ liÞ þ j
Pnm¼1mal
smlðtÞj
li
Pnm¼1jslmðtÞj � l2i
8<:
9=;. (49)
Let H 01ðl; lÞ denotes the derivative of H1ðl; lÞ with respect to the variable l, then, we have the following results:
(i)
The synchronizability of the delayed network with global unidirectional coupling is determined by thesecond-largest eigenvalue l2 if H 0ðl; lÞp0 for all l ¼ 1; . . . ; n in interval l 2 ½lN ; l2. In other words, thedelayed network will realize synchronization iftpho minl¼1;...;n
fH1ð�1; lÞg. (50)
(ii)
The synchronizability of the delayed network with global unidirectional coupling is determined by thesmallest eigenvalue lN if H 0ðl; lÞX0 for all l ¼ 1; . . . ; n in interval l 2 ½lN ; l2. That is, the delayednetwork will realize synchronization iftpho minl¼1;...;n
fH1ð�ðN � 1Þ; lÞg. (51)
(iii)
Or else, the synchronizability of the delayed network with global unidirectional coupling is determined byeigenvalue li, 2pipN, �ðN � 1Þplip� 1.
ARTICLE IN PRESS
0 5 10 15 20 25 30−4
−3
−2
−1
0
1
2
3
4
time
sta
te v
ariable
s
25 26 27 28 29 30−4
−3
−2
−1
0
1
2
3
4
time
sta
te v
ariable
sFig. 2. Time responses of the state variables in the delayed network with global unidirectional coupling in time interval ½0 30: (a)
t ¼ 0:0194; (b) t ¼ 0:0320.
J. Wu, L. Jiao / Physica A 386 (2007) 513–530 525
For example, if N ¼ 6, the synchronizability of the delayed network with global unidirectional couplingconsisting of the two-cell CNNs is determined by l2 ¼ �1, it will synchronize when to0:12 from (49); whereasN ¼ 50, it is determined by l50 ¼ �49, and it will synchronize when to0:0195 from (49). The simulationresults are shown in Fig. 2, obviously, it is a delay-dependent network.
For comparing, the coupling configuration matrix of the delayed network with global symmetric coupling is
Ggs ¼
�ðN � 1Þ 1 1
1 �ðN � 1Þ . .. ..
.
..
. . .. . .
.1
1 1 �ðN � 1Þ
26666664
37777775, (52)
which has only two different eigenvalues, l1 ¼ 0 and l2 ¼ �N with multiplicity N � 1. From Corollary 3, asufficient condition for synchronization is easily obtained as follows:
tpho minl¼1;...;n
fH1ð�N; lÞg. (53)
For the delayed network consisting of 50 two-cell CNNs with global symmetric coupling, it will synchronizewhen to0:0191 from (53). Simulation results are shown in Fig. 3.
Remark 6. Comparing (51) and (53), one can see clearly that the synchronizability of the delayed networkwith global unidirectional coupling, if it is determined by the smallest eigenvalue lN , will approach to that ofthe delayed network with global symmetric coupling as the number of nodes increasing.
Remark 7. As an illustrating example of Remark 5, it can be seen clearly that the synchronizability of adelayed network is not always characterized by the second-largest eigenvalue l2 of its coupling configurationmatrix.
4.2. Nearest-neighbor unidirectional coupling
Secondly, consider a nearest-neighbor coupled network consisting of N nodes arranged in a ringand each node only connected to its neighbor nodes with unidirectional coupling. The coupling configuration

ARTICLE IN PRESS
0 1 2 3 4 5−4
−3
−2
−1
0
1
2
3
4
time
sta
te v
ariable
s
19 19.2 19.4 19.6 19.8 20−4
−3
−2
−1
0
1
2
3
4
time
sta
te v
ariable
sFig. 3. Time responses of the state variables in the delayed network with global symmetric coupling: (a) t ¼ 0:0190 in time interval ½0 5;
(b) t ¼ 0:0310 in time interval ½0 20.
J. Wu, L. Jiao / Physica A 386 (2007) 513–530526
matrix is
Gnu ¼
�1 1 0 0
0 �1 1 . .. ..
.
..
. . .. . .
. . ..
0
0 0 �1 1
1 0 0 �1
266666664
377777775, (54)
which has eigenvalues:
liþ1 ¼ e2ipj=N � 1; i ¼ 0; . . . ;N � 1, (55)
where j ¼ffiffiffiffiffiffiffi�1p
. From Corollary 2, a sufficient condition for synchronization in the nearest-neighborunidirectional coupled network is then obtained
to mini¼1;...;N�1
l¼1;...;n
�ðsllðtÞ þ cosð2ip=NÞ � 1þ jPn
m¼1malðsmlðtÞÞj þ j sinð2ip=NÞjÞ
ðj cosð2ip=NÞ � 1j þ j sinð2ip=NÞjÞPn
m¼1jslmðtÞj þ ðj cosð2ip=NÞ � 1j þ j sinð2ip=NÞjÞ2. (56)
For the nearest-neighbor unidirectional coupled network consisting of 50 two-cell CNNs, we cannot find asolution from (56).
The coupling configuration matrix of a nearest-neighbor coupled network with symmetric coupling is asfollows:
Gns ¼
�2 1 0 0 1
1 �2 1 0 . ..
0
0 1 . .. . .
. . .. ..
.
..
. . .. . .
. . .. . .
.0
0 0 1 �2 1
1 0 0 1 �2
266666666664
377777777775, (57)

ARTICLE IN PRESS
100 150 200−3
−2
−1
0
1
2
3
time
sta
te v
aria
ble
s
199 199.2 199.4 199.6 199.8 200−3
−2
−1
0
1
2
3
time
sta
te v
aria
ble
sFig. 4. Time responses of the state variables in the delayed network with nearest-neighbor symmetric coupling in time interval ½0200: (a)
t ¼ 0:0155; (b) t ¼ 0:4000.
J. Wu, L. Jiao / Physica A 386 (2007) 513–530 527
which has only real eigenvalues:
li ¼ �4 sin2 ði � 1Þp
N
� �; i ¼ 1; . . . ;N. (58)
From Corollary 3, a sufficient condition ensuring synchronization is easily obtained as follows:
tpho mini¼2;...;Nl¼1;...;n
H1 �4 sin2 ði � 1Þp
N
� �; l
� �� �. (59)
From (59) with N ¼ 50, and by some algebra, one can obtain that the synchronizability of thedelayed network with nearest-neighbor symmetric coupling consisting of the two-cell CNNs isdetermined by l8 ¼ �0:7252, and it will synchronize when to0:0156. Simulation results are shown inFig. 4.
4.3. Star unidirectional coupling
At last, in a delayed network with star unidirectional coupling, all nodes are connected to one center node,and the coupling configuration matrix is
Gsu ¼
�1 0 0 1
0 �1 0 1
..
. . .. . .
. . .. ..
.
�1 1
0 0 0
26666664
37777775, (60)
which has only two different eigenvalues also, l1 ¼ 0 and l2 ¼ �1 with multiplicityN � 1. Similarly, asufficient condition for synchronization is obtained the same as (50). One can get that the delayed networkconsisting of the two-cell CNNs with star unidirectional coupling will realize synchronization if to0:12.Simulation results are shown in Fig. 5.

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530528
Whereas the coupling configuration matrix of a delayed network with star symmetric coupling is
Gss ¼
�ðN � 1Þ 1 1 1
1 �1 0 0
1 0 . .. . .
. ...
..
. ... . .
.�1 0
1 0 0 �1
266666664
377777775, (61)
0 5 10 15 20−4
−3
−2
−1
0
1
2
3
4
time
sta
te v
ariable
s
90 92 94 96 98 100−3
−2
−1
0
1
2
3
time
sta
te v
ariable
s
Fig. 5. Time responses of the state variables in the delayed network with star unidirectional coupling: (a) t ¼ 0:1199 in time interval ½0 20;
(b) t ¼ 1:5 in time interval ½0 100.
0 5 10 15 20−4
−3
−2
−1
0
1
2
3
4
time
sta
te v
ariable
s
18 18.5 19 19.5 20−6
−4
−2
0
2
4
6
time
sta
te v
ariable
s
Fig. 6. Time responses of the state variables in the delayed network with star symmetric coupling in time interval [0 20]: (a) t ¼ 0:0190; (b)t ¼ 0:0315.

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530 529
which has three different real eigenvalues, l1 ¼ 0; l2 ¼ �1 with multiplicity N � 2, and l3 ¼ �N. Then, it iseasy to get the following interesting conclusions from Corollary 3:
(i)
If the synchronizability of the delayed network with star symmetric coupling is determined by the second-largest eigenvalue l2 ¼ �1, sufficient condition for synchronization is the same as that with starunidirectional coupling given in (50), which is also a sufficient condition for synchronization in the delayednetwork with global unidirectional coupling when its synchronizability is determined by the second-largesteigenvalue.(ii)
Else if the synchronizability of the delayed network with star symmetric coupling is determined by thesmallest eigenvalue l3 ¼ �N, sufficient condition for synchronization is the same as that with globalsymmetric coupling given in (53).For the network consisting of 50 two-cell CNNs with star symmetric coupling, its synchronizability isdetermined by l3 ¼ �50 and it will synchronize when to0:0191 from (53). Simulation results are shown inFig. 6.
Simulations show that all the above networks consisting of the two-cell CNNs are delay-dependent, that is,they can realize synchronization only when the time-delay less than a threshold, or else, they will losesynchronization.
5. Conclusion
We investigate synchronization phenomena based on a new general delayed complex dynamical networkmodel with nonsymmetric coupling. The matrix canonical formalization method is used instead the matrixdiagonalization method, several criteria for both delay-independent and delay-dependent synchronization innetworks with nonsymmetric coupling are derived, which generalize some previous results. Analysis indicatesthat the synchronizability of a delayed network cannot be characterized by the second-largest eigenvalue ofthe coupling configuration matrix even though it has only real eigenvalues. The effects of time-delay on thesynchronizability of unidirectional coupled networks with several typical topological structures are analyzed,and the results are verified by simulations on networks in which each node is a two-dimensional limit cycleoscillator system consisting of a two-cell cellular neural network.
References
[1] R. Albert, A.-L. Barabasi, Statistical mechanics of complex networks, Rev. Mod. Phys. 74 (2002) 47–97.
[2] S.H. Strogatz, Exploring complex networks, Nature 410 (2001) 268–276.
[3] D.J. Watts, S.H. Strogatz, Collective dynamics of small-world networks, Nature 393 (1998) 440–442.
[4] X. Wang, G. Chen, Complex networks: small-world, scale-free and beyond, IEEE Circuits Syst. Mag. 3 (2003) 6–20.
[5] J.A.K. Suykens, P.F. Curran, L.O. Chua, Robust synthesis for master–slave synchronization of Lur’e systems, IEEE Trans. Circuit
Syst. I 46 (1999) 841–850.
[6] W. Lu, T. Chen, Synchronization of coupled connected neural networks with delays, IEEE Trans. Circuit Syst. I 51 (2004) 2491–2503.
[7] X. Wang, Complex networks: topology, dynamics and synchronization, Int. J. Bifurc. Chaos 12 (2002) 885–916.
[8] X. Wang, G. Chen, Synchronization in small-world dynamical networks, Int. J. Bifurc. Chaos 12 (2002) 187–192.
[9] X. Wang, G. Chen, Synchronization in scale-free dynamical networks: robustness and fragility, IEEE Trans. Circuit Syst. I 49 (2002)
54–62.
[10] X. Li, G. Chen, Synchronization and desynchronization of complex dynamical networks: an engineering viewpoint, IEEE Trans.
Circuit Syst. I 50 (2003) 1381–1390.
[11] J. Lu, X. Yu, G. Chen, D. Chen, Characterizing the synchronizability of small-world dynamical networks, IEEE Trans. Circuit Syst. I
51 (2004) 787–796.
[12] Z. Li, G. Chen, Global synchronization and asymptotic stability of complex dynamical networks, IEEE Trans. Circuit Syst. II 53
(2006) 28–33.
[13] C. Li, G. Chen, Synchronization in general complex dynamical networks with coupling delays, Physica A 343 (2004) 263–278.
[14] J. Zhou, T. Chen, Synchronization in general complex delayed dynamical networks, IEEE Trans. Circuit Syst. I 53 (2006) 733–744.
[15] J. Lu, G. Chen, A time-varying complex dynamical network model and its controlled synchronization criteria, IEEE Trans. Autom.
Control 50 (2005) 841–846.
[16] J. Lu, X. Yu, G. Chen, Chaos synchronization of general complex dynamical networks, Physica A 334 (2004) 281–302.

ARTICLE IN PRESSJ. Wu, L. Jiao / Physica A 386 (2007) 513–530530
[17] R.J. Williams, N.D. Martinez, E.L. Berlow, J.A. Dunne, A.-L. Barabasi, Two degrees of separation in complex food webs, Proc.
Natl. Acad. Sci. 99 (2002) 12913–12916.
[18] H. Jeong, B. Tombor, R. Albert, Z. Oltvai, A.-L. Barabasi, The large-scale organization of metabolic networks, Nature 407 (2000)
651–653.
[19] R. Albert, H. Jeong, A.-L. Barabasi, Diameter of the World Wide Web, Nature 401 (1999) 130–131.
[20] G.S. Zaric, Random vs. nonrandom mixing in network epidemic models, Health Care Manage. Sci. 5 (2002) 147–155.
[21] L. Egghe, R. Rousseau, Co-citation, bibliographic coupling and a characterization of lattice citation networks, Scientometrics 55
(2002) 349–361.
[22] R.A. Horn, C.R. Johnson, Topics in Matrix Analysis, Post & Telecom Press, China, 2005.
[23] W. Lu, T. Chen, New approach to synchronization analysis of linearly coupled ordinary differential systems, Physica D 213 (2006)
214–230.
[24] W. Lu, T. Chen, G. Chen, Synchronization analysis of linearly coupled systems described by differential equations with a coupling
delay, Physica D 221 (2006) 118–134.
[25] J. Zhou, J. Lu, J. Lu, Adaptive synchronization of an uncertain complex dynamical network, IEEE Trans. Autom. Control 51 (2006)
652–656.
[26] C.W. Wu, L.O. Chua, Synchronization in an array of linearly coupled dynamical systems, IEEE Trans. Circuit Syst. I 42 (1995)
430–447.
[27] C.W. Wu, Synchronization in coupled arrays of chaotic oscillators with nonreciprocal coupling, IEEE Trans. Circuit Syst. I 50 (2003)
294–297.
[28] C.W. Wu, Synchronization in arrays of coupled nonlinear systems with delay and nonreciprocal time-varying coupling, IEEE Trans.
Circuit Syst. II 52 (2005) 282–286.
[29] J. Lu, G. Chen, A new chaotic attractor coined, Int. J. Bifurc. Chaos 12 (2002) 659–661.
[30] J.-J.E. Slotine, W. Li, Applied Nonlinear Control, China Machine Press, China, 2004.
[31] L.O. Chua, L. Yang, Cellular neural networks: theory, IEEE Trans. Circuit Syst. 35 (1988) 1257–1272.
[32] P.P. Civalleri, M. Gilli, On the dynamic behavior of two-cell cellular neural networks, Int. J. Circuit Theory Appl. 21 (1993) 451–471.


![THE EHRLICH-ABERTH METHOD FOR THEftisseur/reports/aberth.pdftridiagonal form [12], [15]. In the sparse case, the nonsymmetric Lanczos algorithm produces a nonsymmetric tridiagonal](https://img.pdfslide.net/doc/110x75/60aa58279dcb0e7be268753b/the-ehrlich-aberth-method-for-ftisseurreportsaberthpdf-tridiagonal-form-12.jpg)

![NONSYMMETRIC STRUCTURED MULTIFRONTAL ... - College …or pattern symmetric matrices. The main contribution of this paper is to extend the approaches in [20, 22] to nonsymmetric matrices](https://img.pdfslide.net/doc/110x75/5f7014491da2725899418336/nonsymmetric-structured-multifrontal-college-or-pattern-symmetric-matrices.jpg)