Embed Size (px)
Citation preview
MainPage Classes Files ExamplesClassList ClassIndex ClassMembers
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
ClassList
Herearetheclasses,structs,unionsandinterfaceswithbriefdescriptions:
Sabertooth ControlsaSabertoothorSyRenmotordriverrunninginPacketSerialmode
MainPage Classes Files ExamplesClassList ClassIndex ClassMembers
PublicMemberFunctions|StaticPublicMemberFunctions|
Listofallmembers
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
SabertoothClassReference
ControlsaSabertoothorSyRenmotordriverrunninginPacketSerialmode.More...
PublicMemberFunctions Sabertooth(byteaddress)
Sabertooth(byteaddress,SabertoothStream&port)
byte address()constSabertoothStream& port()const
void autobaud(booleandontWait=false)const
void command(bytecommand,bytevalue)const
void motor(intpower)const
void motor(bytemotor,intpower)const
void drive(intpower)const
void turn(intpower)const
void stop()const
void setMinVoltage(bytevalue)const
void setMaxVoltage(bytevalue)const
void setBaudRate(longbaudRate)const
void setDeadband(bytevalue)const
void setRamping(bytevalue)const
void setTimeout(intmilliseconds)const
StaticPublicMemberFunctions
staticvoid autobaud(SabertoothStream&port,booleandontWait=false)
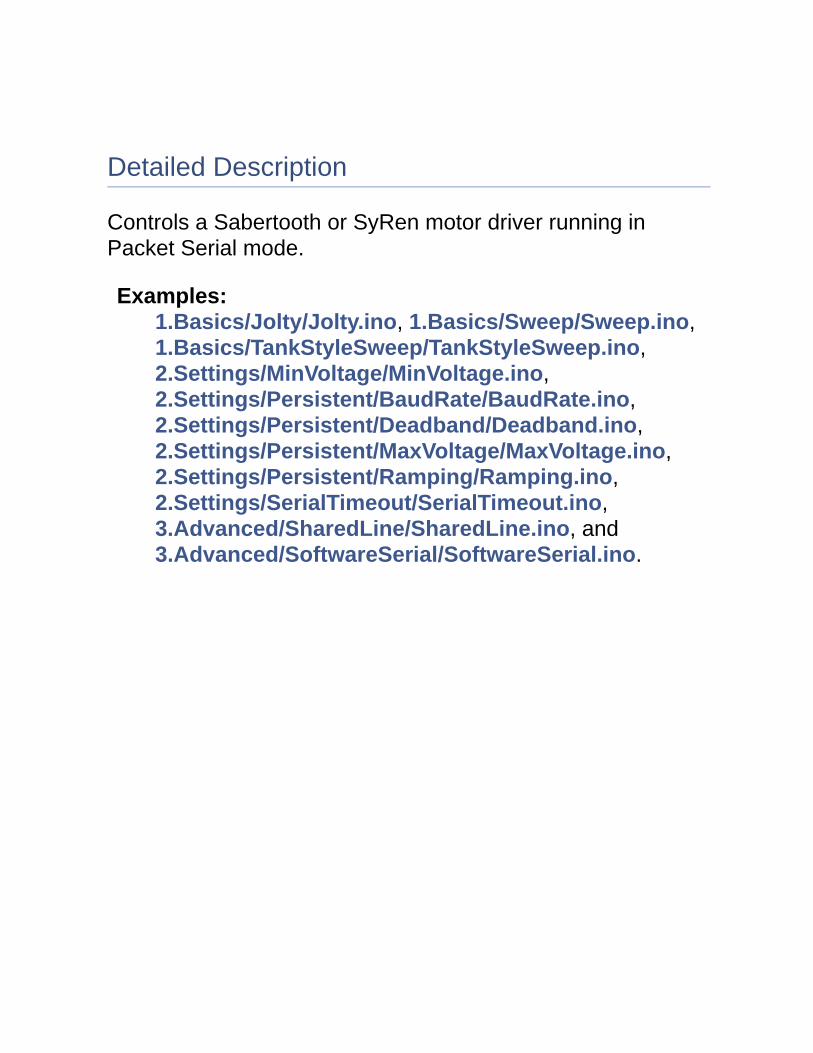
DetailedDescription
ControlsaSabertoothorSyRenmotordriverrunninginPacketSerialmode.
Examples:1.Basics/Jolty/Jolty.ino,1.Basics/Sweep/Sweep.ino,1.Basics/TankStyleSweep/TankStyleSweep.ino,2.Settings/MinVoltage/MinVoltage.ino,2.Settings/Persistent/BaudRate/BaudRate.ino,2.Settings/Persistent/Deadband/Deadband.ino,2.Settings/Persistent/MaxVoltage/MaxVoltage.ino,2.Settings/Persistent/Ramping/Ramping.ino,2.Settings/SerialTimeout/SerialTimeout.ino,3.Advanced/SharedLine/SharedLine.ino,and3.Advanced/SoftwareSerial/SoftwareSerial.ino.
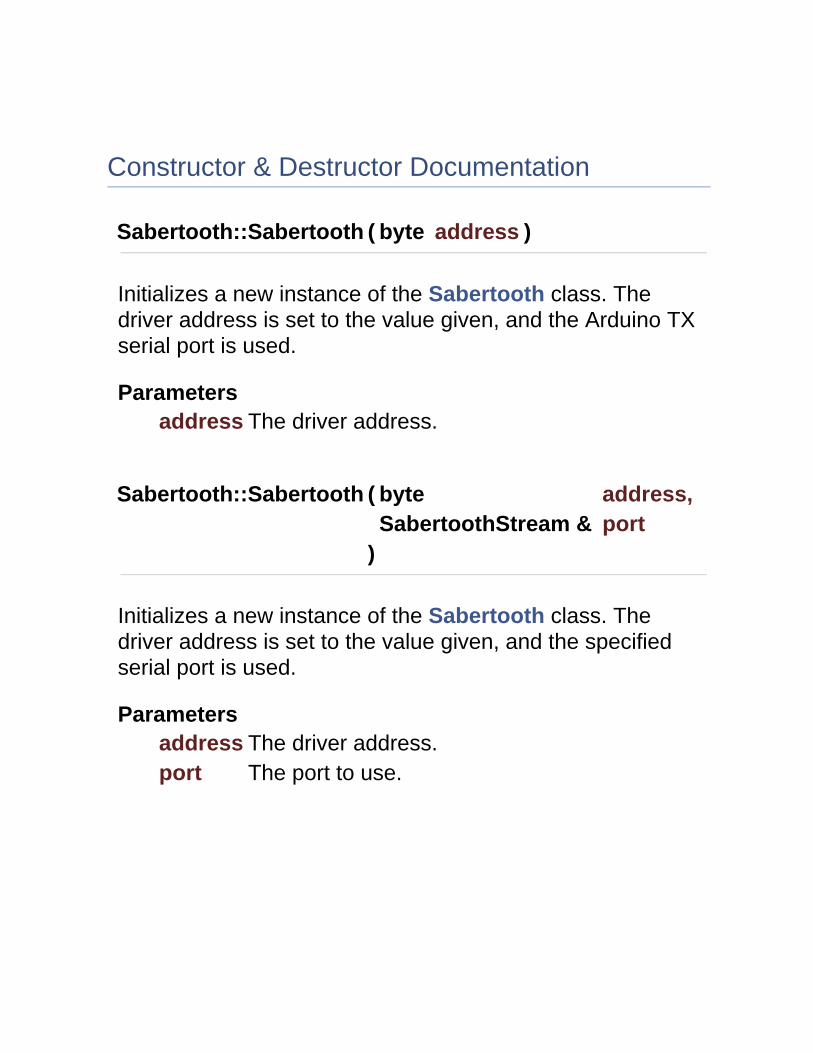
Constructor&DestructorDocumentation
Sabertooth::Sabertooth ( byte address )
InitializesanewinstanceoftheSabertoothclass.Thedriveraddressissettothevaluegiven,andtheArduinoTXserialportisused.
Parametersaddress Thedriveraddress.
Sabertooth::Sabertooth ( byte address,SabertoothStream& port)
InitializesanewinstanceoftheSabertoothclass.Thedriveraddressissettothevaluegiven,andthespecifiedserialportisused.
Parametersaddress Thedriveraddress.port Theporttouse.
MemberFunctionDocumentation
byteSabertooth::address ( ) const inline
Getsthedriveraddress.
ReturnsThedriveraddress.
voidSabertooth::autobaud ( boolean dontWait=false ) const
Sendstheautobaudcharacter.
ParametersdontWait Iffalse,adelayisaddedtogivethedriver
timetostartup.
Examples:3.Advanced/SharedLine/SharedLine.ino.
voidSabertooth::autobaud ( SabertoothStream& port,
boolean dontWait=false)
Sendstheautobaudcharacter.
Parametersport Theporttouse.dontWait Iffalse,adelayisaddedtogivethedrivertimetostart
up.
voidSabertooth::command ( byte command,byte value) const
Sendsapacketserialcommandtothemotordriver.
Parameterscommand Thenumberofthecommand.value Thecommand'svalue.
voidSabertooth::drive ( int power ) const
Setsthedrivingpower.
Parameterspower Thepower,between-127and127.
voidSabertooth::motor ( int power ) const
Setsthepowerofmotor1.
Parameterspower Thepower,between-127and127.
Examples:3.Advanced/SharedLine/SharedLine.ino.
voidSabertooth::motor ( bytemotor,int power) const
Setsthepowerofthespecifiedmotor.
Parametersmotor Themotornumber,1or2.power Thepower,between-127and127.
SabertoothStream&Sabertooth::port ( ) const inline
Getstheserialport.
ReturnsTheserialport.
voidSabertooth::setBaudRate ( long baudRate ) const
Setsthebaudrate.BaudrateisstoredinEEPROM,sochangespersistbetweenpowercycles.
ParametersbaudRate Thebaudrate.Thiscanbe2400,9600,
19200,38400,oronsomedrivers115200.
voidSabertooth::setDeadband ( byte value ) const
Setsthedeadband.DeadbandisstoredinEEPROM,sochangespersistbetweenpowercycles.
Parametersvalue Thedeadbandvalue.Motorpowersintherange
[-deadband,deadband]willbeconsideredinthedeadband,andwillnotpreventthedriverfromenteringnorcausethedrivertoleaveanidlebrakestate.0resetstothedefault,whichis3.
voidSabertooth::setMaxVoltage ( byte value ) const
Setsthemaximumvoltage.MaximumvoltageisstoredinEEPROM,sochangespersistbetweenpowercycles.
Parametersvalue Thevoltage.Theunitsofthisvaluearedriver-
specificandarespecifiedinthePacketSerialchapterofthedriver'susermanual.
voidSabertooth::setMinVoltage ( byte value ) const
Setstheminimumvoltage.
Parametersvalue Thevoltage.Theunitsofthisvaluearedriver-
specificandarespecifiedinthePacketSerialchapterofthedriver'susermanual.
voidSabertooth::setRamping ( byte value ) const
Setstheramping.RampingisstoredinEEPROM,sochangespersistbetweenpowercycles.
Parametersvalue Therampingvalue.Consulttheusermanualfor
possiblevalues.
voidSabertooth::setTimeout ( int milliseconds ) const
Setstheserialtimeout.
Parametersmilliseconds Themaximumtimeinmilliseconds
betweenpackets.Ifthistimeisexceeded,thedriverwillstopthemotors.Thisvalueisroundeduptothenearest100milliseconds.Thislibraryassumesthecommandvalueisinunitsof100milliseconds.Thisistrueformostdrivers,butnotall.Checkthepacketserialchapterofthedriver'susermanualtomakesure.
voidSabertooth::stop ( ) const
Stops.
voidSabertooth::turn ( int power ) const
Setstheturningpower.
Parameterspower Thepower,between-127and127.
MainPage Classes Files ExamplesClassList ClassIndex ClassMembers
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
ClassIndex
S
S
Sabertooth
S
MainPage Classes Files ExamplesClassList ClassIndex ClassMembers
All Functions
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
Hereisalistofalldocumentedclassmemberswithlinkstotheclassdocumentationforeachmember:
address():Sabertoothautobaud():Sabertoothcommand():Sabertoothdrive():Sabertoothmotor():Sabertoothport():SabertoothSabertooth():SabertoothsetBaudRate():SabertoothsetDeadband():SabertoothsetMaxVoltage():SabertoothsetMinVoltage():SabertoothsetRamping():SabertoothsetTimeout():Sabertoothstop():Sabertoothturn():Sabertooth
MainPage Classes Files ExamplesClassList ClassIndex ClassMembers
All Functions
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
address():Sabertoothautobaud():Sabertoothcommand():Sabertoothdrive():Sabertoothmotor():Sabertoothport():SabertoothSabertooth():SabertoothsetBaudRate():SabertoothsetDeadband():SabertoothsetMaxVoltage():SabertoothsetMinVoltage():SabertoothsetRamping():SabertoothsetTimeout():Sabertoothstop():Sabertoothturn():Sabertooth
MainPage Classes Files ExamplesFileList
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
FileList
Hereisalistofalldocumentedfileswithbriefdescriptions:[detaillevel1 2]
SabertoothSabertooth.h
MainPage Classes Files ExamplesSabertooth
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
SabertoothDirectoryReference
Filesfile Sabertooth.cppfile Sabertooth.h[code]
MainPage Classes Files ExamplesFileList
Sabertooth
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
Sabertooth.h
1 /*
2 ArduinoLibraryforSyRen/SabertoothPacket
Serial
3 Copyright(c)2012-2013DimensionEngineering
LLC
4 http://www.dimensionengineering.com/arduino
5
6 Permissiontouse,copy,modify,and/or
distributethissoftwareforany
7 purposewithorwithoutfeeishereby
granted,providedthattheabove
8 copyrightnoticeandthispermissionnotice
appearinallcopies.
9
10 THESOFTWAREISPROVIDED"ASIS"ANDTHE
AUTHORDISCLAIMSALLWARRANTIES
11 WITHREGARDTOTHISSOFTWAREINCLUDINGALL
IMPLIEDWARRANTIESOF
12 MERCHANTABILITYANDFITNESS.INNOEVENT
SHALLTHEAUTHORBELIABLEFORANY
13 SPECIAL,DIRECT,INDIRECT,ORCONSEQUENTIAL
DAMAGESORANYDAMAGESWHATSOEVER
14 RESULTINGFROMLOSSOFUSE,DATAORPROFITS,
WHETHERINANACTIONOFCONTRACT,
15 NEGLIGENCEOROTHERTORTIOUSACTION,ARISING
OUTOFORINCONNECTIONWITHTHE
16 USEORPERFORMANCEOFTHISSOFTWARE.
17 */
18
19 #ifndefSabertooth_h
20 #defineSabertooth_h
21
22 #ifdefined(ARDUINO)&&ARDUINO>=100
23 #include<Arduino.h>
24 typedefStreamSabertoothStream;
25 #else
26 #include<WProgram.h>
27 typedefPrintSabertoothStream;
28 #endif
29
30 #ifdefined(USBCON)
31 #defineSabertoothTXPinSerialSerial1//
ArduinoLeonardohasTX->1onSerial1,not
Serial.
32 #else
33 #defineSabertoothTXPinSerialSerial
34 #endif
35 #defineSyRenTXPinSerial
SabertoothTXPinSerial
36
41 classSabertooth
42 {
43 public:
49 Sabertooth(byteaddress);
50
57 Sabertooth(byteaddress,SabertoothStream&
port);
58
59 public:
64 inlinebyteaddress()const{return
_address;}
65
70 inlineSabertoothStream&port()const{
return_port;}
71
76 voidautobaud(booleandontWait=false)
const;
77
83 staticvoidautobaud(SabertoothStream&
port,booleandontWait=false);
84
90 voidcommand(bytecommand,bytevalue)
const;
91
92 public:
97 voidmotor(intpower)const;
98
104 voidmotor(bytemotor,intpower)const;
105
110 voiddrive(intpower)const;
111
116 voidturn(intpower)const;
117
121 voidstop()const;
122
123 public:
128 voidsetMinVoltage(bytevalue)const;
129
135 voidsetMaxVoltage(bytevalue)const;
136
142 voidsetBaudRate(longbaudRate)const;
143
152 voidsetDeadband(bytevalue)const;
153
159 voidsetRamping(bytevalue)const;
160
169 voidsetTimeout(intmilliseconds)const;
170
171 private:
172 voidthrottleCommand(bytecommand,int
power)const;
173
174 private:
175 constbyte_address;
176 SabertoothStream&_port;
177 };
178
179 #endif
MainPage Classes Files Examples
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
Examples
Hereisalistofallexamples:
1.Basics/Jolty/Jolty.ino1.Basics/Sweep/Sweep.ino1.Basics/TankStyleSweep/TankStyleSweep.ino2.Settings/MinVoltage/MinVoltage.ino2.Settings/Persistent/BaudRate/BaudRate.ino2.Settings/Persistent/Deadband/Deadband.ino2.Settings/Persistent/MaxVoltage/MaxVoltage.ino2.Settings/Persistent/Ramping/Ramping.ino2.Settings/SerialTimeout/SerialTimeout.ino3.Advanced/SharedLine/SharedLine.ino3.Advanced/SoftwareSerial/SoftwareSerial.ino
MainPage Classes Files Examples
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
1.Basics/Jolty/Jolty.ino
Goesinonedirection,stops,andthengoesintheotherdirection.
//JoltySampleforPacketSerial
//Copyright(c)2012DimensionEngineeringLLC
//Seelicense.txtforlicensedetails.
#include<Sabertooth.h>
SabertoothST(128);//TheSabertoothisonaddress
128.We'llnameitsobjectST.
//Ifyou'vesetupyourSabertoothonadifferent
address,ofcoursechange
//thathere.Forhowtoconfigureaddress,etc.
seetheDIPSwitchWizardfor
//Sabertooth-
http://www.dimensionengineering.com/datasheets/
SabertoothDIPWizard/start.htm
//SyRen-
http://www.dimensionengineering.com/datasheets/
SyrenDIPWizard/start.htm
//BesuretoselectPacketizedSerialModefor
usewiththislibrary.
//
//Onthatnote,youcanusethislibraryfor
SyRenjustaseasily.
//Thediff-drivecommands(drive,turn)donot
workonaSyRen,ofcourse,butitwillrespond
correctly
//ifyoucommandmotor1todosomething
(ST.motor(1,...)),justlikeaSabertooth.
//
//Inthissample,hardwareserialTXconnectsto
S1.
//SeetheSoftwareSerialexamplein3.Advanced
forhowtouseotherpins.
voidsetup()
{
SabertoothTXPinSerial.begin(9600);//9600isthe
defaultbaudrateforSabertoothpacketserial.
ST.autobaud();//Sendtheautobaudcommandto
theSabertoothcontroller(s).
//NOTE:*Notall*Sabertoothcontrollersneed
thiscommand.
//Itdoesn'thurtanything,butV2
controllersusean
//EEPROMsetting(changeablewiththe
functionsetBaudRate)toset
//thebaudrateinsteadofdetectingwith
autobaud.
//
//Ifyouhavea2x12,2x25V2,2x60or
SyRen50,youcanremove
//theautobaudlineandsaveyourselftwo
secondsofstartupdelay.
}
voidloop()
{
ST.motor(1,127);//Goforwardatfullpower.
delay(2000);//Wait2seconds.
ST.motor(1,0);//Stop.
delay(2000);//Wait2seconds.
ST.motor(1,-127);//Reverseatfullpower.
delay(2000);//Wait2seconds.
ST.motor(1,0);//Stop.
delay(2000);
}
MainPage Classes Files Examples
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
1.Basics/Sweep/Sweep.ino
Sweepsfromfullreversetofullforwardandthenfromfullforwardtofullreverse.
//SweepSampleforPacketSerial
//Copyright(c)2012DimensionEngineeringLLC
//Seelicense.txtforlicensedetails.
#include<Sabertooth.h>
SabertoothST(128);//TheSabertoothisonaddress
128.We'llnameitsobjectST.
//Ifyou'vesetupyourSabertoothonadifferent
address,ofcoursechange
//thathere.Forhowtoconfigureaddress,etc.
seetheDIPSwitchWizardfor
//Sabertooth-
http://www.dimensionengineering.com/datasheets/
SabertoothDIPWizard/start.htm
//SyRen-
http://www.dimensionengineering.com/datasheets/
SyrenDIPWizard/start.htm
//BesuretoselectPacketizedSerialModefor
usewiththislibrary.
//
//Onthatnote,youcanusethislibraryfor
SyRenjustaseasily.
//Thediff-drivecommands(drive,turn)donot
workonaSyRen,ofcourse,butitwillrespond
correctly
//ifyoucommandmotor1todosomething
(ST.motor(1,...)),justlikeaSabertooth.
//
//Inthissample,hardwareserialTXconnectsto
S1.
//SeetheSoftwareSerialexamplein3.Advanced
forhowtouseotherpins.
voidsetup()
{
SabertoothTXPinSerial.begin(9600);//9600isthe
defaultbaudrateforSabertoothpacketserial.
ST.autobaud();//Sendtheautobaudcommandto
theSabertoothcontroller(s).
//NOTE:*Notall*Sabertoothcontrollersneed
thiscommand.
//Itdoesn'thurtanything,butV2
controllersusean
//EEPROMsetting(changeablewiththe
functionsetBaudRate)toset
//thebaudrateinsteadofdetectingwith
autobaud.
//
//Ifyouhavea2x12,2x25V2,2x60or
SyRen50,youcanremove
//theautobaudlineandsaveyourselftwo
secondsofstartupdelay.
}
voidloop()
{
intpower;
//Rampmotor1from-127to127(fullreverseto
fullforward),
//waiting20ms(1/50thofasecond)pervalue.
for(power=-127;power<=127;power++)
{
ST.motor(1,power);
delay(20);
}
//Nowgobackthewaywecame.
for(power=127;power>=-127;power--)
{
ST.motor(1,power);//TipforSyRenusers:
TypingST.motor(power)doesthesamethingas
ST.motor(1,power).
delay(20);//
SinceSyRendoesn'thaveamotor2,this
alternativecansaveyoutyping.
}
}
MainPage Classes Files Examples
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
1.Basics/TankStyleSweep/TankStyleSweep.ino
Sweepsvariousrangesinmixed(rover)mode.
//Tank-StyleSweepSampleforPacketSerial
//Copyright(c)2012DimensionEngineeringLLC
//Seelicense.txtforlicensedetails.
#include<Sabertooth.h>
//Mixedmodeisfortank-stylediff-driverobots.
SabertoothST(128);//TheSabertoothisonaddress
128.We'llnameitsobjectST.
//Ifyou'vesetupyourSabertoothonadifferent
address,ofcoursechange
//thathere.Forhowtoconfigureaddress,etc.
seetheDIPSwitchWizardfor
//Sabertooth-
http://www.dimensionengineering.com/datasheets/
SabertoothDIPWizard/start.htm
//SyRen-
http://www.dimensionengineering.com/datasheets/
SyrenDIPWizard/start.htm
//BesuretoselectPacketizedSerialModefor
usewiththislibrary.
//
//Thissampleusesthemixedmode(diff-drive)
commands,whichrequiretwomotors
//andhencedonotworkonaSyRen.
//
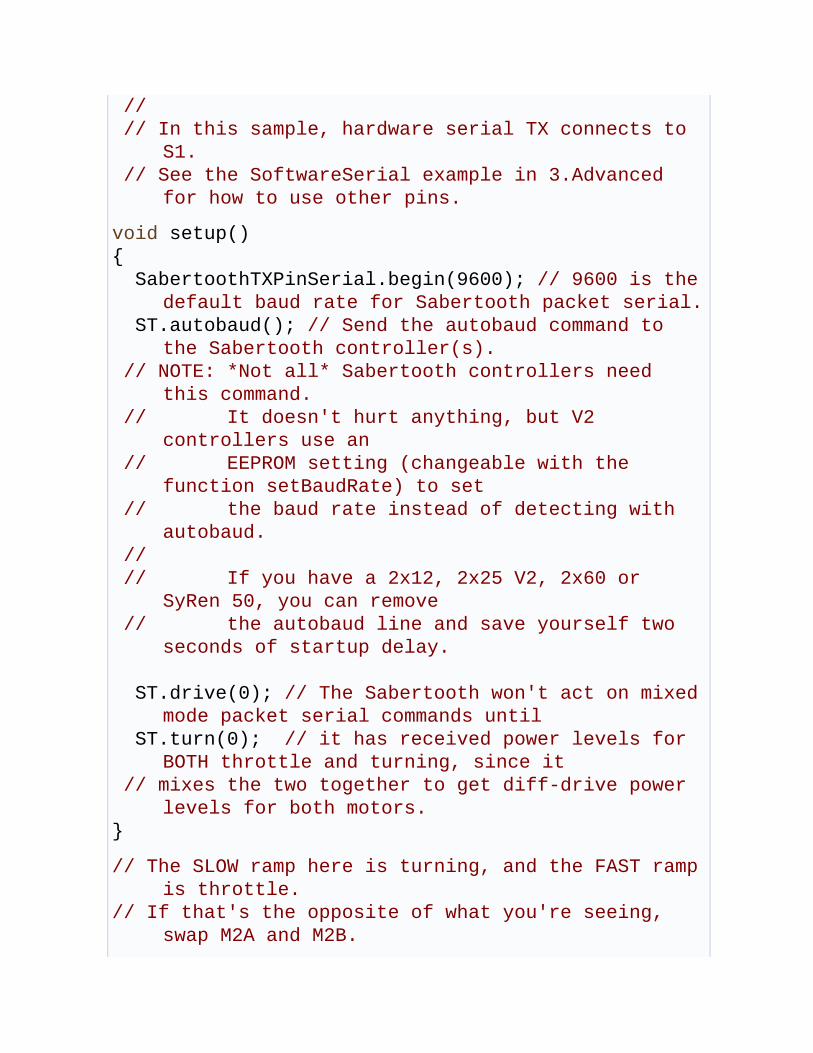
//Inthissample,hardwareserialTXconnectsto
S1.
//SeetheSoftwareSerialexamplein3.Advanced
forhowtouseotherpins.
voidsetup()
{
SabertoothTXPinSerial.begin(9600);//9600isthe
defaultbaudrateforSabertoothpacketserial.
ST.autobaud();//Sendtheautobaudcommandto
theSabertoothcontroller(s).
//NOTE:*Notall*Sabertoothcontrollersneed
thiscommand.
//Itdoesn'thurtanything,butV2
controllersusean
//EEPROMsetting(changeablewiththe
functionsetBaudRate)toset
//thebaudrateinsteadofdetectingwith
autobaud.
//
//Ifyouhavea2x12,2x25V2,2x60or
SyRen50,youcanremove
//theautobaudlineandsaveyourselftwo
secondsofstartupdelay.
ST.drive(0);//TheSabertoothwon'tactonmixed
modepacketserialcommandsuntil
ST.turn(0);//ithasreceivedpowerlevelsfor
BOTHthrottleandturning,sinceit
//mixesthetwotogethertogetdiff-drivepower
levelsforbothmotors.
}
//TheSLOWramphereisturning,andtheFASTramp
isthrottle.
//Ifthat'stheoppositeofwhatyou'reseeing,
swapM2AandM2B.
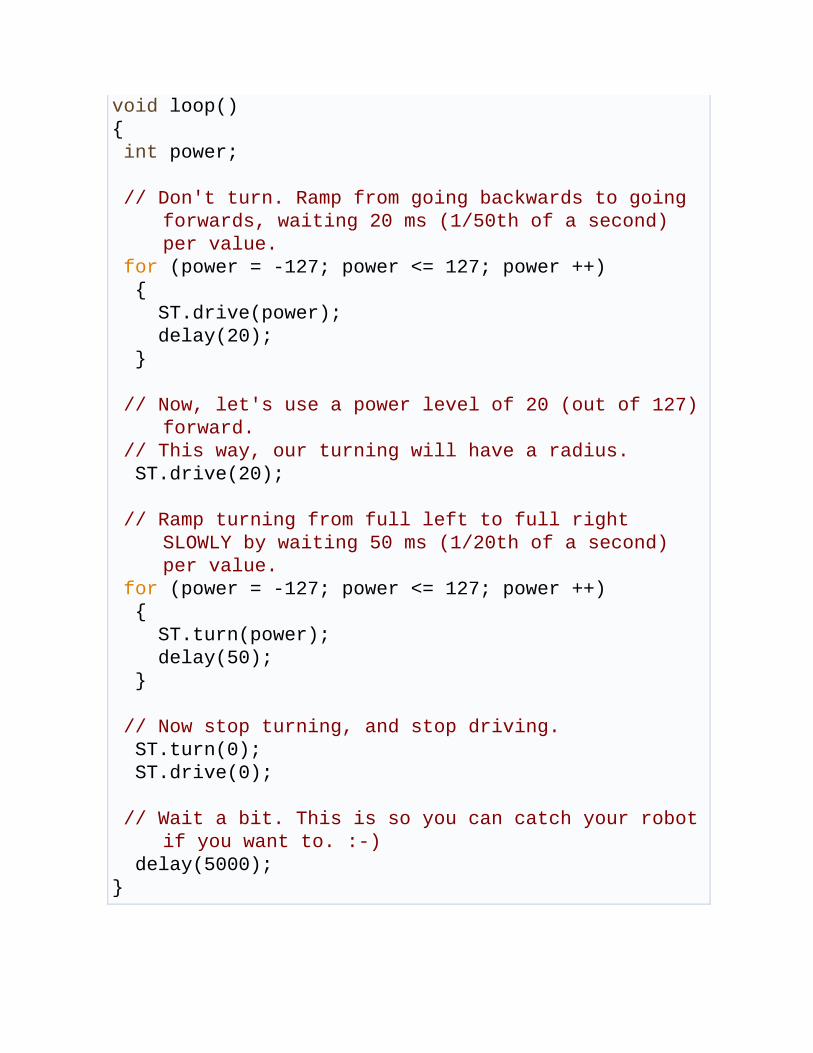
voidloop()
{
intpower;
//Don'tturn.Rampfromgoingbackwardstogoing
forwards,waiting20ms(1/50thofasecond)
pervalue.
for(power=-127;power<=127;power++)
{
ST.drive(power);
delay(20);
}
//Now,let'suseapowerlevelof20(outof127)
forward.
//Thisway,ourturningwillhavearadius.
ST.drive(20);
//Rampturningfromfulllefttofullright
SLOWLYbywaiting50ms(1/20thofasecond)
pervalue.
for(power=-127;power<=127;power++)
{
ST.turn(power);
delay(50);
}
//Nowstopturning,andstopdriving.
ST.turn(0);
ST.drive(0);
//Waitabit.Thisissoyoucancatchyourrobot
ifyouwantto.:-)
delay(5000);
}
MainPage Classes Files Examples
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
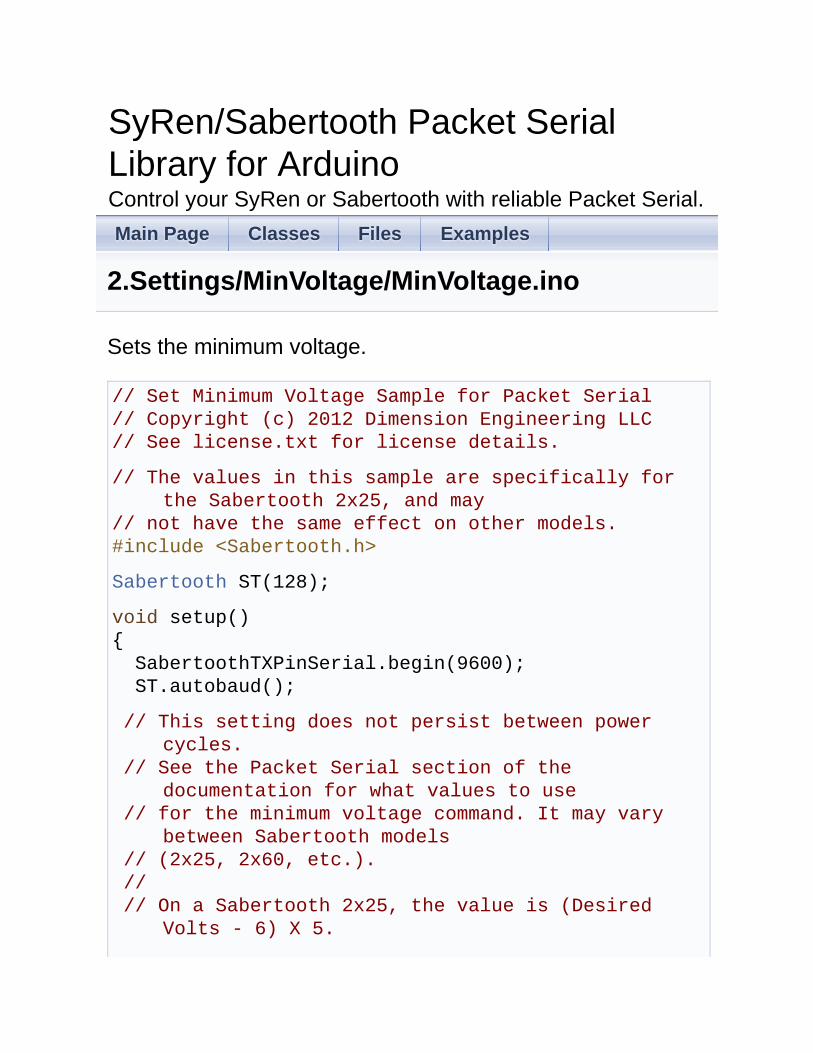
2.Settings/MinVoltage/MinVoltage.ino
Setstheminimumvoltage.
//SetMinimumVoltageSampleforPacketSerial
//Copyright(c)2012DimensionEngineeringLLC
//Seelicense.txtforlicensedetails.
//Thevaluesinthissamplearespecificallyfor
theSabertooth2x25,andmay
//nothavethesameeffectonothermodels.
#include<Sabertooth.h>
SabertoothST(128);
voidsetup()
{
SabertoothTXPinSerial.begin(9600);
ST.autobaud();
//Thissettingdoesnotpersistbetweenpower
cycles.
//SeethePacketSerialsectionofthe
documentationforwhatvaluestouse
//fortheminimumvoltagecommand.Itmayvary
betweenSabertoothmodels
//(2x25,2x60,etc.).
//
//OnaSabertooth2x25,thevalueis(Desired
Volts-6)X5.
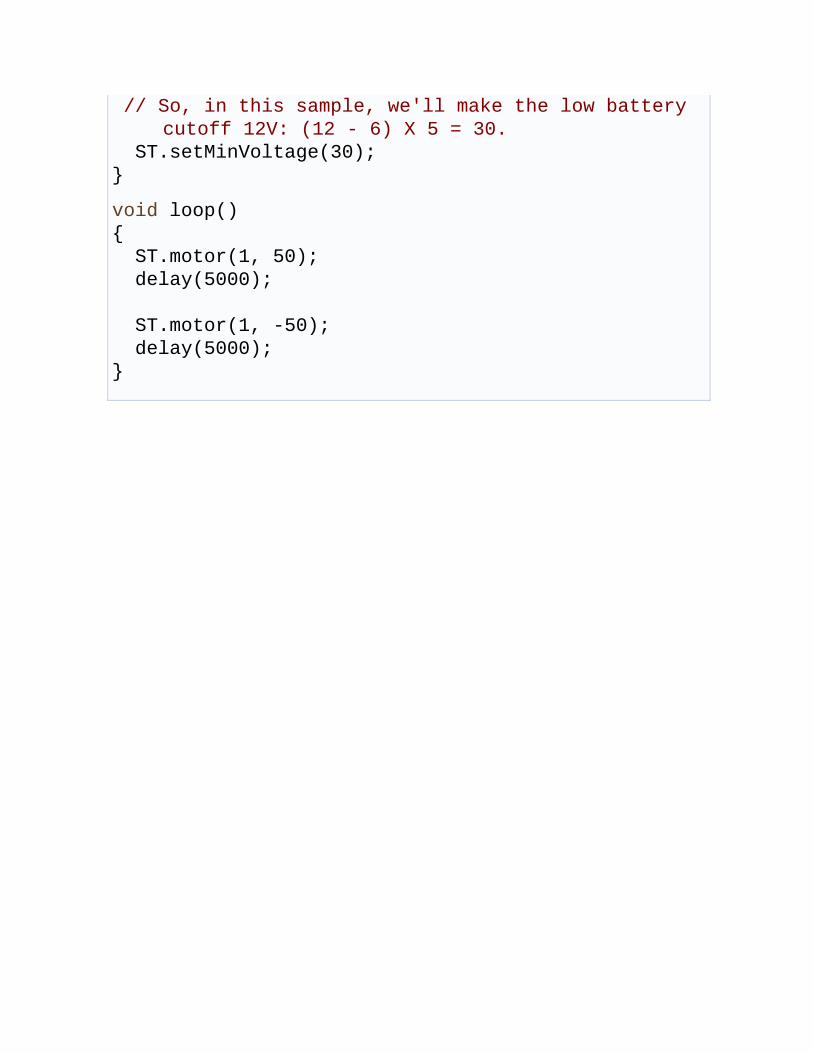
//So,inthissample,we'llmakethelowbattery
cutoff12V:(12-6)X5=30.
ST.setMinVoltage(30);
}
voidloop()
{
ST.motor(1,50);
delay(5000);
ST.motor(1,-50);
delay(5000);
}
MainPage Classes Files Examples
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
2.Settings/Persistent/BaudRate/BaudRate.ino
ChangesthePacketSerialbaudrate.
WARNING:Thissamplemakeschangesthatwillpersistbetweenrestarts.
//SetBaudRateSampleforPacketSerial
//Copyright(c)2012DimensionEngineeringLLC
//Seelicense.txtforlicensedetails.
//WARNING:Thissamplemakeschangesthatwill
persistbetweenrestarts.
//NOTE:ThesetBaudRatefunctionwillonlyhavean
effectonV2controllers(2x12,2x25V2,2x60,
SyRen50).
//Earliercontrollersautomaticallydetect
thebaudrateyouchooseinSerial.begin
//whenyoucalltheautobaudfunction.
AutobaudwasreplacedinV2controllersfor
reliability
//intheeventthattheSabertoothlost
power.
#include<Sabertooth.h>
SabertoothST(128);
voidsetup()
{
//ThissamplewilltelltheSabertooth*at9600
baud*to*switchto2400baud*.
//Keepinmindyoumustsendthecommandto
changethebaudrate*atthebaudrate
//theSabertoothislisteningat*(factory
defaultis9600).Afterthat,ifitworks,
//youwillbeabletocommunicateusingthenew
baudrate.
//
//Optionsare:
//2400
//9600
//19200
//38400
//115200(onlysupportedbysomedevicessuch
as2X60--checkthedevice'sdatasheet)
//
//WARNING:TheSabertoothremembersthiscommand
betweenrestarts.
//TochangeyourSabertoothbacktoitsdefault,
youmust*beatthebaudrateyou've
//settheSabertoothto*,andthencall
ST.setBaudRate(9600)
SabertoothTXPinSerial.begin(9600);
ST.setBaudRate(2400);
SabertoothTXPinSerial.end();
//OK,we'reat2400.Let'stalktotheSabertooth
atthatspeed.
SabertoothTXPinSerial.begin(2400);
}
voidloop()
{
ST.drive(0);
ST.turn(20);
delay(2000);
ST.turn(-20);
delay(2000);
}
MainPage Classes Files Examples
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
2.Settings/Persistent/Deadband/Deadband.ino
Modifiesthedeadband.
WARNING:Thissamplemakeschangesthatwillpersistbetweenrestarts.
//SetDeadbandSampleforPacketSerial
//Copyright(c)2012DimensionEngineeringLLC
//Seelicense.txtforlicensedetails.
//WARNING:Thissamplemakeschangesthatwill
persistbetweenrestartsANDinallmodes.
#include<Sabertooth.h>
SabertoothST(128);
voidsetup()
{
SabertoothTXPinSerial.begin(9600);
ST.autobaud();
//Thismakesthedeadbandfrom-20to20(of
127).
//Ifyourcommandsforamotorstayentirely
withinthedeadbandformorethan
//asecond,themotordriverwillstopthemotor.
//WARNING:TheSabertoothremembersthiscommand
betweenrestartsANDinallmodes.
//TochangeyourSabertoothbacktoitsdefault,
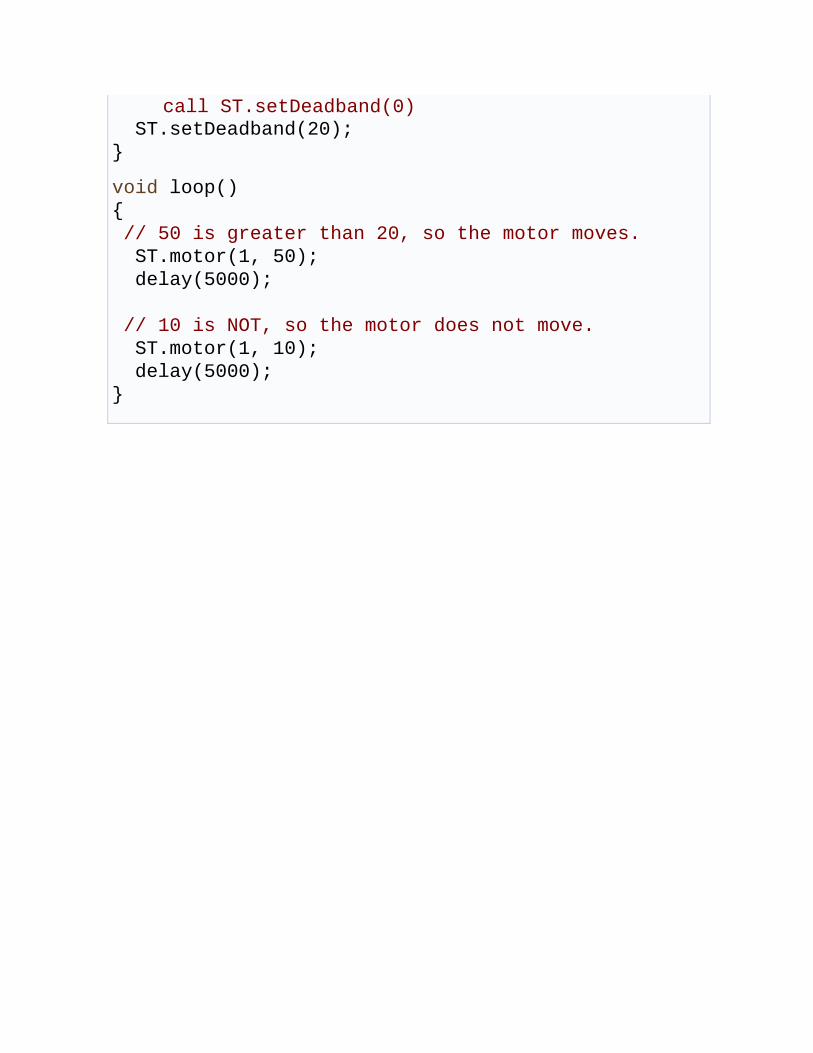
callST.setDeadband(0)
ST.setDeadband(20);
}
voidloop()
{
//50isgreaterthan20,sothemotormoves.
ST.motor(1,50);
delay(5000);
//10isNOT,sothemotordoesnotmove.
ST.motor(1,10);
delay(5000);
}
MainPage Classes Files Examples
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
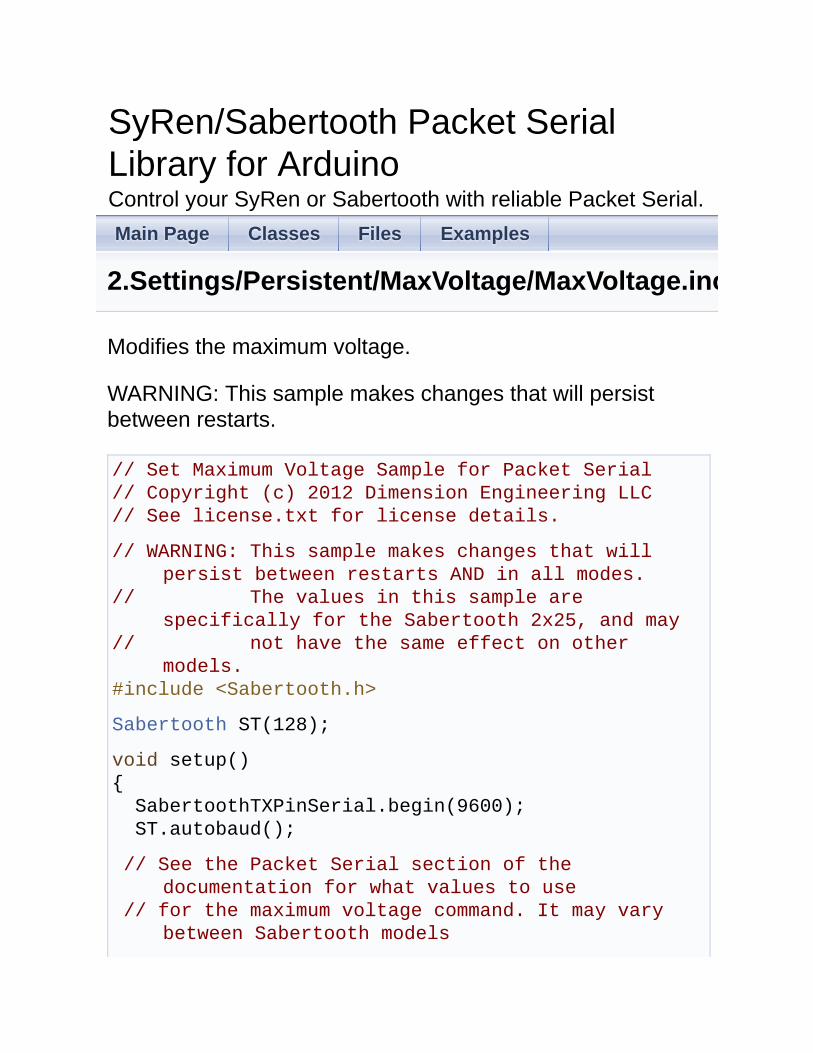
2.Settings/Persistent/MaxVoltage/MaxVoltage.ino
Modifiesthemaximumvoltage.
WARNING:Thissamplemakeschangesthatwillpersistbetweenrestarts.
//SetMaximumVoltageSampleforPacketSerial
//Copyright(c)2012DimensionEngineeringLLC
//Seelicense.txtforlicensedetails.
//WARNING:Thissamplemakeschangesthatwill
persistbetweenrestartsANDinallmodes.
//Thevaluesinthissampleare
specificallyfortheSabertooth2x25,andmay
//nothavethesameeffectonother
models.
#include<Sabertooth.h>
SabertoothST(128);
voidsetup()
{
SabertoothTXPinSerial.begin(9600);
ST.autobaud();
//SeethePacketSerialsectionofthe
documentationforwhatvaluestouse
//forthemaximumvoltagecommand.Itmayvary
betweenSabertoothmodels
//(2x25,2x60,etc.).
//
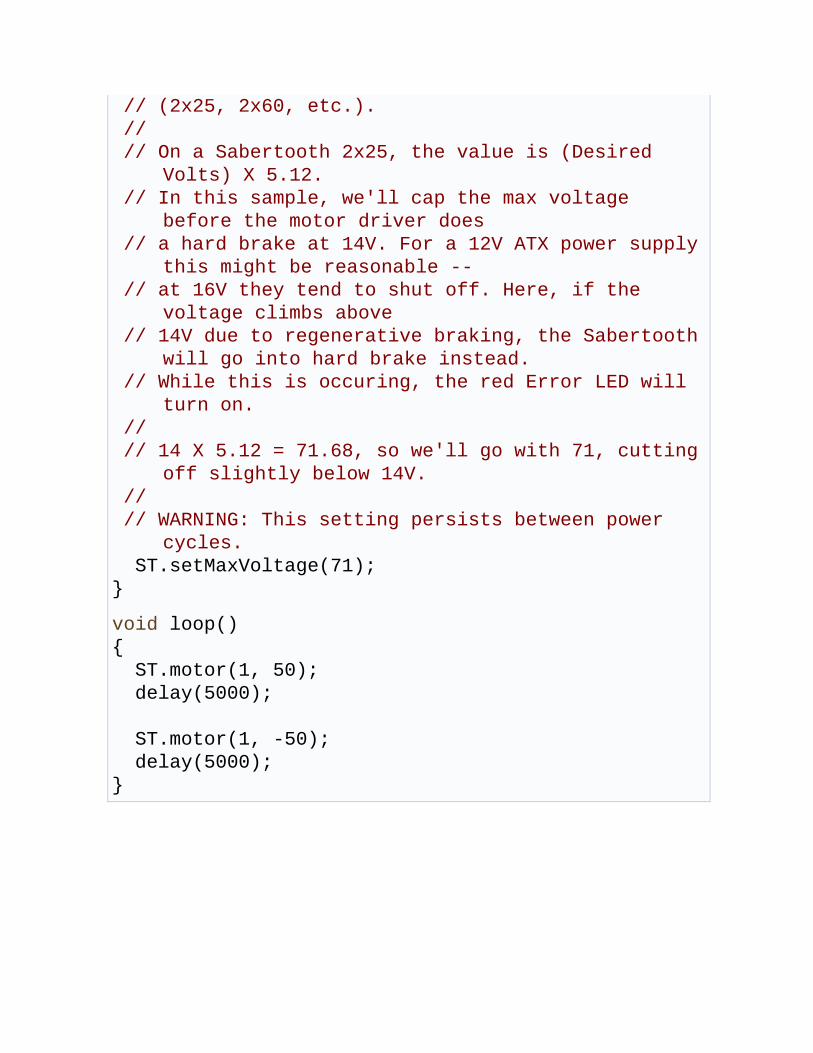
//OnaSabertooth2x25,thevalueis(Desired
Volts)X5.12.
//Inthissample,we'llcapthemaxvoltage
beforethemotordriverdoes
//ahardbrakeat14V.Fora12VATXpowersupply
thismightbereasonable--
//at16Vtheytendtoshutoff.Here,ifthe
voltageclimbsabove
//14Vduetoregenerativebraking,theSabertooth
willgointohardbrakeinstead.
//Whilethisisoccuring,theredErrorLEDwill
turnon.
//
//14X5.12=71.68,sowe'llgowith71,cutting
offslightlybelow14V.
//
//WARNING:Thissettingpersistsbetweenpower
cycles.
ST.setMaxVoltage(71);
}
voidloop()
{
ST.motor(1,50);
delay(5000);
ST.motor(1,-50);
delay(5000);
}

MainPage Classes Files Examples
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
2.Settings/Persistent/Ramping/Ramping.ino
Modifiestheramptime.
WARNING:Thissamplemakeschangesthatwillpersistbetweenrestarts.
//SetRampingSampleforPacketSerial
//Copyright(c)2012DimensionEngineeringLLC
//Seelicense.txtforlicensedetails.
//WARNING:Thissamplemakeschangesthatwill
persistbetweenrestartsANDinallmodes.
#include<Sabertooth.h>
SabertoothST(128);
voidsetup()
{
SabertoothTXPinSerial.begin(9600);
ST.autobaud();
//SeetheSabertooth2x60documentationfor
informationonrampingvalues.
//Therearethreeranges:1-10(Fast),11-20
(Slow),and21-80(Intermediate).
//Therampingvalue14usedheresetsaramptime
of4secondsforfull
//forward-to-fullreverse.
//
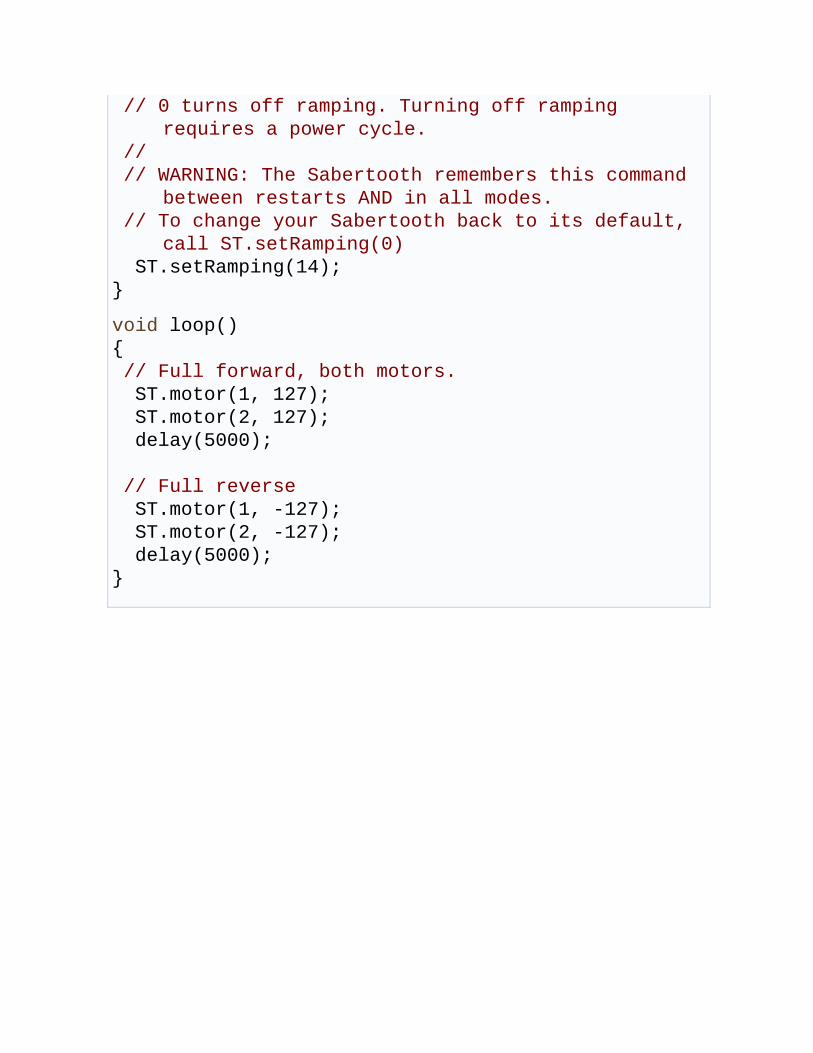
//0turnsofframping.Turningofframping
requiresapowercycle.
//
//WARNING:TheSabertoothremembersthiscommand
betweenrestartsANDinallmodes.
//TochangeyourSabertoothbacktoitsdefault,
callST.setRamping(0)
ST.setRamping(14);
}
voidloop()
{
//Fullforward,bothmotors.
ST.motor(1,127);
ST.motor(2,127);
delay(5000);
//Fullreverse
ST.motor(1,-127);
ST.motor(2,-127);
delay(5000);
}
MainPage Classes Files Examples
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
2.Settings/SerialTimeout/SerialTimeout.ino
Setsaserialtimeout,andthendelaystodemonstrateitsstoppingbehavior.
//SetSerialTimeoutSampleforPacketSerial
//Copyright(c)2012DimensionEngineeringLLC
//Seelicense.txtforlicensedetails.
#include<Sabertooth.h>
SabertoothST(128);
voidsetup()
{
SabertoothTXPinSerial.begin(9600);
ST.autobaud();
//setTimeoutroundsuptothenearest100
milliseconds,sothis950willactuallybe1
second.
//Avalueof0disablestheserialtimeout.
ST.setTimeout(950);
}
voidloop()
{
//Setmotor1toreverse20(outof127),and
sleepfor5seconds.
//Noticehowitcutsoutafter1second--this
istheserialtimeoutinaction.
//Sinceweconfigureditinsetup()for1second,
1secondwithoutanynew
//commandswillcausethemotorstostop.
ST.motor(1,-20);
delay(5000);
//Whydothis?
//IftheS1wiregetscutforsomereason,orif
yourprogramcrashes,
//theSabertoothwillstopreceivingcommands
fromtheArduino.
//Withatimeout,yourrobotwillstop.So,it's
asafetyfeaturemostly.
}
MainPage Classes Files Examples
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
3.Advanced/SharedLine/SharedLine.ino
CommunicateswithtwoSabertoothmotordriversusingasharedTX/S1wire.
//SharedLineSampleforPacketSerial
//Copyright(c)2012DimensionEngineeringLLC
//Seelicense.txtforlicensedetails.
#include<Sabertooth.h>
//Upto8Sabertooth/SyRenmotordriverscanshare
thesameS1line.
//Thissampleusesthree:address128and129on
ST1[0]andST1[2],
//andaddress130onST2.
SabertoothST1[2]={Sabertooth(128),
Sabertooth(129)};
SabertoothST2(130);
voidsetup()
{
SabertoothTXPinSerial.begin(9600);
Sabertooth::autobaud(SabertoothTXPinSerial);//
Autobaudisforthewholeserialline--you
don'tneedtodo
//itforeachindividualmotordriver.Thisis
theversionof
//theautobaudcommandthatisnottiedtoa
particular
//Sabertoothobject.
//Seetheexamplesin1.Basicsforinformationon
whetheryou
//needthislineatall.
}
voidloop()
{
//ST1[0](address128)haspower50(of127max)
onM1,
//ST1[1](address129)haspower60(of127max)
onM2,and
//ST2(address130)we'lldotank-styleand
haveitdrive20andturnright50.
//Dothisfor5seconds.
ST1[0].motor(1,50);
ST1[1].motor(2,60);
ST2.drive(20);
ST2.turn(50);
delay(5000);
//Andnowlet'sstopfor5seconds,except
address130--we'llletitstopandturn
left...
ST1[0].motor(1,0);
ST1[1].motor(2,0);
ST2.drive(0);
ST2.turn(-40);
delay(5000);
}
MainPage Classes Files Examples
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
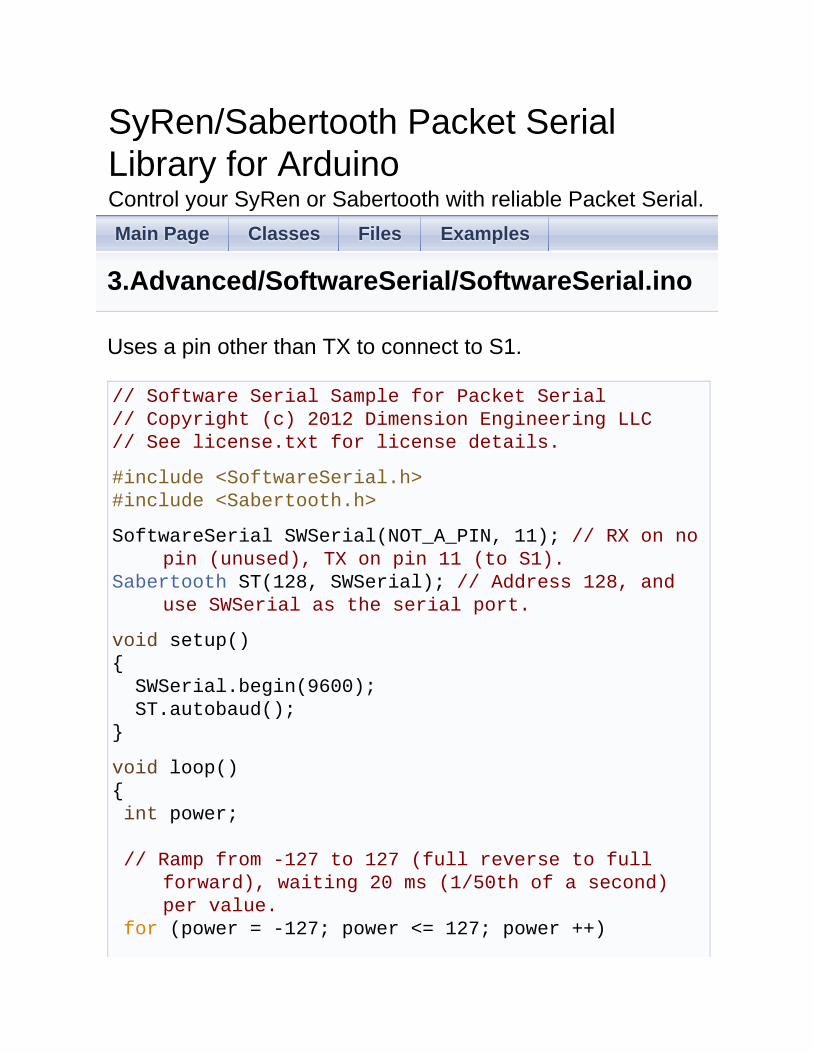
3.Advanced/SoftwareSerial/SoftwareSerial.ino
UsesapinotherthanTXtoconnecttoS1.
//SoftwareSerialSampleforPacketSerial
//Copyright(c)2012DimensionEngineeringLLC
//Seelicense.txtforlicensedetails.
#include<SoftwareSerial.h>
#include<Sabertooth.h>
SoftwareSerialSWSerial(NOT_A_PIN,11);//RXonno
pin(unused),TXonpin11(toS1).
SabertoothST(128,SWSerial);//Address128,and
useSWSerialastheserialport.
voidsetup()
{
SWSerial.begin(9600);
ST.autobaud();
}
voidloop()
{
intpower;
//Rampfrom-127to127(fullreversetofull
forward),waiting20ms(1/50thofasecond)
pervalue.
for(power=-127;power<=127;power++)
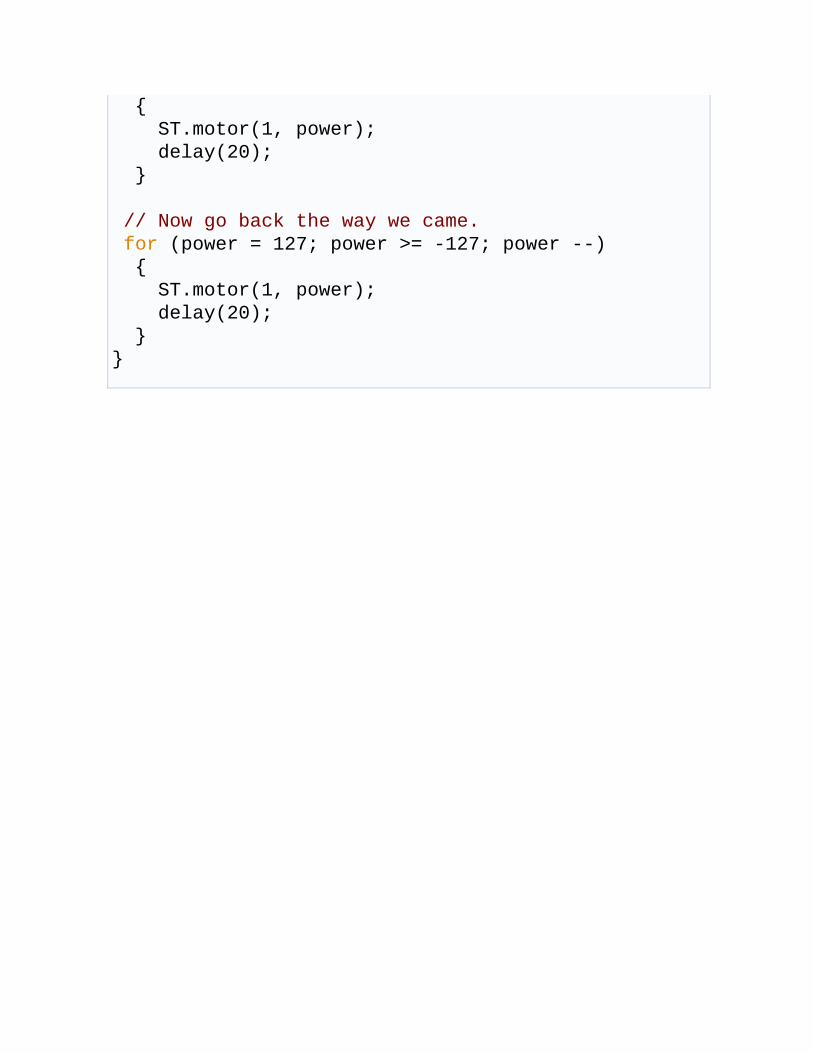
{
ST.motor(1,power);
delay(20);
}
//Nowgobackthewaywecame.
for(power=127;power>=-127;power--)
{
ST.motor(1,power);
delay(20);
}
}
MainPage Classes Files ExamplesClassList ClassIndex ClassMembers
SyRen/SabertoothPacketSerialLibraryforArduinoControlyourSyRenorSabertoothwithreliablePacketSerial.
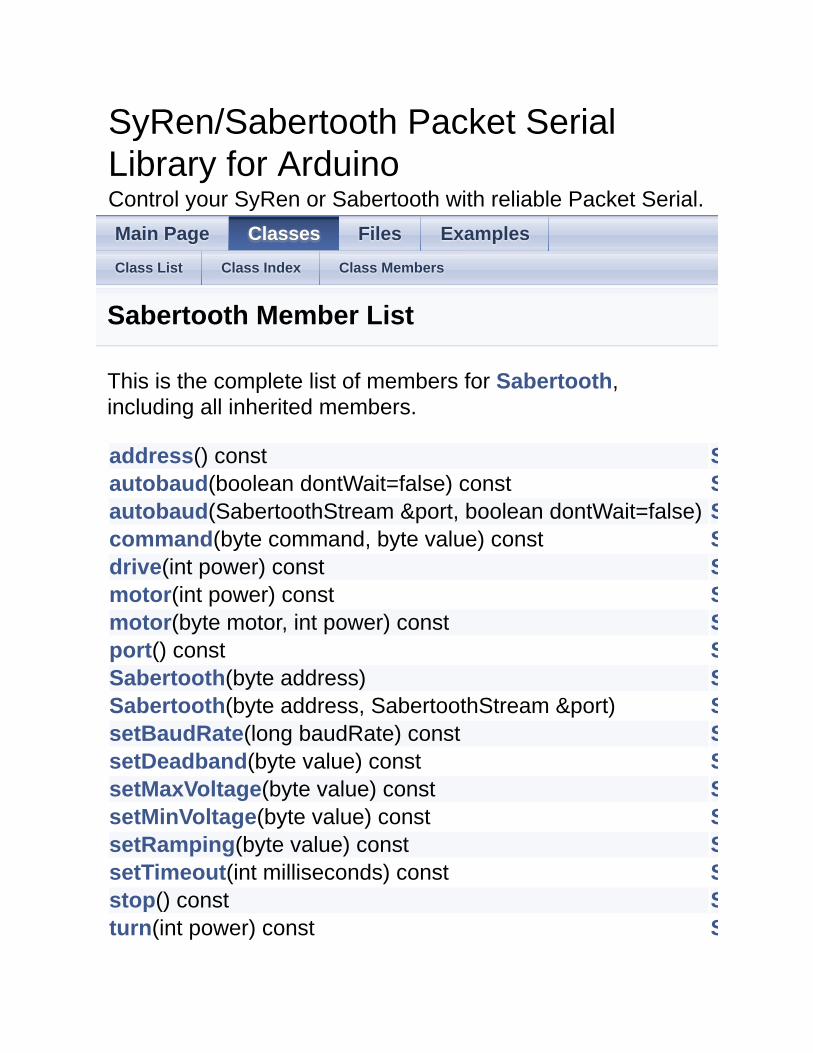
SabertoothMemberList
ThisisthecompletelistofmembersforSabertooth,includingallinheritedmembers.
address()const Sabertoothautobaud(booleandontWait=false)const Sabertoothautobaud(SabertoothStream&port,booleandontWait=false) Sabertoothcommand(bytecommand,bytevalue)const Sabertoothdrive(intpower)const Sabertoothmotor(intpower)const Sabertoothmotor(bytemotor,intpower)const Sabertoothport()const SabertoothSabertooth(byteaddress) SabertoothSabertooth(byteaddress,SabertoothStream&port) SabertoothsetBaudRate(longbaudRate)const SabertoothsetDeadband(bytevalue)const SabertoothsetMaxVoltage(bytevalue)const SabertoothsetMinVoltage(bytevalue)const SabertoothsetRamping(bytevalue)const SabertoothsetTimeout(intmilliseconds)const Sabertoothstop()const Sabertoothturn(intpower)const Sabertooth