Embed Size (px)
DESCRIPTION
ELECT 1002. System-On-a-Chip Design. SoC Co-Design: Co-Specification Models. Dr. Eng. Amr T. Abdel-Hamid. Spring 2009. SoC HW/SW Co-Design. - PowerPoint PPT Presentation
Citation preview

SoC Co-Design: Co-Specification Models
Dr. Eng. Amr T. Abdel-Hamid
ELECT 1002
Spring 2009
System
-On
-a-Ch
ip D
esign

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Co-Specification (System Model Generation): Developing system specification that describes hardware software modules and relationship between the hardware and software.
Model the (embedded) system functionality from an abstract level. No concept of hardware or software. Common environment: SystemC: based on C++.
Co-Synthesis: Automatic and semi Automatic design of hardware and software modules to meet the specification
Partitioning: Dividing the functionality of an embedded system into units
of computation Scheduling:
Assign an execution start time to each task in a set, where tasks are linked by some relations
SoC HW/SW Co-Design

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Allocation: Determining on which processing elements (PEs) some
computation will occur Select the number and type of communication links
and processing elements for the target system. Assignment (Mapping):
Choosing particular component types for the allocated computation units
Co-Simulation and Co-verification Simultaneous simulation of hardware and software
SoC HW/SW Co-Design

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
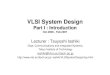
SOC Design Tasks1. Model Generation (Co-Spec.)
Bus-arbitrationmodel
Specificationmodel
1
PE-assembly model
2
Time-accurateCommunication
model
3
Implementation model
4
Cycle-accurateComputation
model
5
6
SystemDesign
ComponentDesign
2. Bus-arbitration model generation (Co-Spec.)
3. Protocol refinement (Co-Synthesis)
4. RTL synthesis (Co-Synthesis)
5. IP replacement (Co-Synthesis)
6. Interconnect network generation (Co-Synthesis)
7. Co-Simulation???

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
A representation of a system that can be used to describe its functionality independent of its implementation in hardware or software
Allows hardware/software partitioning to be delayed until trade-offs can be made
Typically used at a high-level in the design process Provides a simulation environment after partitioning is done,
for both hardware and software designers to use to communicate
Supports cross-fertilization (Design Modifications) between hardware and software domains
Unified HW/SW Representation

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Hardware Software Model
Uses a unified representation of the system to allow early performance analysis

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
System Models: State-oriented models: Finite-state machine (FSM), Petri
net Activity-oriented models: Dataflow graph, Flowchart Structure-oriented models: Block diagram, RT netlist, Gate
netlist Data-oriented models: Entity-relationship diagram, Jackson’s
diagram Heterogeneous models: FSM/dataflow graph, State charts,
*Charts. Specification Languages:
UML SystemC SpecC SystemVerilog ESTEREL SDL
Unified HW/SW Representation

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Models and Architectures
Models are conceptual views of the system’s functionality Architectures are abstract views of the system’s
implementation
Model: a set of functional objects and rules for composing these objects
Architecture: a set of implementation components and their connections

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Example: An Elevator Controller Model

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Example: An Elevator Controller Architecture
Processor
Memory
I/O Ports
Flip-Flops
CLCI/O
System Level
(General Purpose Proc.)
Hardware (RTL) Description

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
State-oriented models: Finite-state machine (FSM), Petri net, ASMs
Activity-oriented models: Dataflow graph, Flowchart
Structure-oriented models: Block diagram, RT netlist, Gate netlist
Data-oriented models: Entity-relationship diagram, Jackson’s diagram
Heterogeneous models: FSM/dataflow graph, State charts, *Charts.
System Models:

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Data Flow Diagram
W = Z * (X+Y)
support hierarchy suitable for specifying complex
transformational systems inherent data dependencies
do not express temporal behaviors or control sequencing
weak for modeling embedded systems

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Graphs contain nodes corresponding to operations in either hardware or software
Often used in high-level hardware synthesis Can easily model data flow, control steps, and concurrent
operations because of its graphical nature.
Pipeline Representation
Heterogeneous: Data Control Flow Graphs

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Reactive System continuously react to external and internal stimuli at their
environment’s speed e.g. telephones, automobiles, operating system, etc.
To describe reactive behavior: states and events are good medium
Advantage used to describe and analyze control sequences yield better to analysis and synthesis than alternative control
models due to their finite nature
Finite State Machines

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
State Transition Diagrams Used to visually represent an FSM Emphasis is on identifying states and possible transitions
Circles represent States Arrows represent Transitions
Initial State
State
Transitions
01/01
01/11
S3 S2
S1S0
1-/11
01/10011/0011/10
Input/Output

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
State tables
Table is another way to represent an FSM with an emphasis on exploring all Event/State combinations
Similar to the truth table Doesn’t contain the system clock when specifying its
transitions (it is implicit that transitions occur only when allowed by clock)
Unless different stated, all the transitions are occurring on the positive edge of the clock
Present State
Inputs Next State
Outputs

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
FSM Example
General Machine Description: deliver package of gum after 15 cents deposited single coin slot for dimes, nickels no change
Vending Machine
FSM
N
D
Reset
Clk
OpenCoin
SensorGum
Release Mechanism

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Vending Machine Example
Present State
0¢
5¢
10¢
15¢
D
0 0 1 1 0 0 1 1 0 0 1 1 X
N
0 1 0 1 0 1 0 1 0 1 0 1 X
Inputs Next State
0¢ 5¢ 10¢ X 5¢ 10¢ 15¢ X
10¢ 15¢ 15¢ X
15¢
Output Open
0 0 0 X 0 0 0 X 0 0 0 X 1
Reset
N
N
N, D
[open]15¢
0¢
5¢
10¢
D
D

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Mealy FSM
The FSM where the outputs are used immediately

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Moore FSM
Each bit of the output is passed through a memory element.

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Mealy FSM
Output is dependent on the inputs and the current state
state 1 state 2
transition condition 1 /output 1
transition condition 2 /output 2

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Moore FSM Output is dependent only on the current state
state 1 /output 1
state 2 /output 2
transitioncondition 1
transitioncondition 2

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Moore vs. Mealy FSM
Moore and Mealy FSMs can be functionally equivalent Equivalent Mealy FSM can be derived from Moore FSM and vice
versa Mealy FSM Has Richer Description and usually requires
smaller number of states Smaller circuit area
Mealy FSM computes Outputs as soon as Inputs change Mealy FSM responds one clock cycle sooner than equivalent
Moore FSM Moore FSM has no combinational path between Inputs and
Outputs Moore FSM is more likely to have a shorter critical path

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Mealy FSM - Example
Mealy FSM that Recognizes Sequence “10”
S0 S1
0 / 0 1 / 0 1 / 0
0 / 1
Meaning of states: S0: No elements of the sequence observed S1: “1” observed

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Moore FSM - Example
Moore FSM that Recognizes Sequence “10”
S0 / 0 S1 / 0 S2 / 1
00
0
1
11
reset
Meaning of states: S0: No elements of the sequence observed S1: “1” observed S2: “0” observed

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Disadvantage Flat fashion, lots of states result in unstructured,
unrealistic, and chaotic state diagram (State Space Explosion)
Not suitable for describing concurrent system
Solution: Abstract State Machines (ASMs) Hierarchical Concurrent Finite State Machine
(HCFSM or State Charts) Hierarchical Finite State Machines with Multiple
Concurrency Models (*Charts)
Finite State Machines

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Quake Example
Types of behavior to capture: Wander randomly if don’t see or hear an enemy When see enemy -> attack When hear an enemy -> search and chase When die -> Spawn If health is low and see an enemy ->retreat
Extensions: When see power-ups during wandering -> collect them
Exactly borrowed from John Laird and Mike van Lent’s GDC tutorial

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Example FSM
States: E: enemy in sight S: sound audible D: dead
Events: E: see an enemy S: hear a sound D: die
Action performed: On each transition On each update in
some states (e.g. attack)
SpawnD
Wander~E,~S,~D
~E
D
AttackE,~D~E
E
E
D
~S
ChaseS,~E,~D
E
S
S
D

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Example FSM Problem
States: E: enemy in sight S: sound audible D: dead
Events: E: see an enemy S: hear a sound D: die
SpawnD
Wander~E,~S,~D
~E
D
AttackE,~D~E
E
E
D
~S
ChaseS,~E,~D
E
S
S
D
Problem: Can’t go directly from attack to chase. Why not?

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Better Example FSM
States: E: enemy in sight S: sound audible D: dead
Events: E: see an enemy S: hear a sound D: die
Extra state to recall whether or not heard a sound while attacking
SpawnD
Wander~E,~S,~D
~E
D
AttackE,~S,~D~E
E
E
D
~S
ChaseS,~E,~D
S
S
D
E
Attack-SE,S,~D
~E
~S
S
D

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Example FSM with Retreat
SpawnD
(-E,-S,-L)
Wander-E,-D,-S,-L
E
-SAttack-EE,-D,-S,-L
E
Chase-E,-D,S,-L
S
D
S
D
D
Retreat-EE,-D,-S,L
L
-E
Retreat-S-E,-D,S,L
Wander-L-E,-D,-S,L
Retreat-ESE,-D,S,L
Attack-ESE,-D,S,-L
E
E-E
-L
S
-S
L
-E E
L-L
-L
-L
L
D
• States:– E: enemy in sight– S: sound audible– D: dead– L: Low health
• Worst case: Each extra state variable can add 2n extra states• n = number of
existing states

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Hierarchical FSMs
What if there is no simple action for a state? Expand a state into its own FSM, which explains what to do
if in that state Some events move you around the same level in the
hierarchy, some move you up a level When entering a state, have to choose a state for it’s child
in the hierarchy Set a default, and always go to that Or, random choice Depends on the nature of the behavior

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Hierarchical FSM Example
Note: This is not a complete FSM All links between top level states
still exist Need more states for wander
StartTurn Right
Go-throughDoor
Pick-upPowerup
Wander Attack
Chase
Spawn
~E
E~S
SD
~E

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
HCFSM (StateCharts)
Extension of conventional FSMs by David Harel: (1987) Hierarchy Concurrency Communication
StateCharts Highly structured and economical description language Compact Expressive Compositional Modular

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
StateCharts
Classical automata not useful for complex systems
(complex graphs cannot be understood by humans).
Introduction of hierarchy StateCharts [Harel, 1987]
StateChart = the only unused combination of “flow“
or “state“ with “diagram“ or “chart“

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Introducing hierarchy
FSM will be in exactly one of the substates of S if S is active(either in A or in B or ..)
FSM will be in exactly one of the substates of S if S is active(either in A or in B or ..)

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
StateCharts: Hierarchy
When a superstate is active, exactly one of its substates is active

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Definitions
• Current states of FSMs are also called active states.• States which are not composed of other states are called
basic states.• States containing other states are called super-states.• For each basic state s, the super-states containing s are
called ancestor states.• Super-states S are called OR-super-states, if exactly
one of the sub-states of S is active whenever S is active.
ancestor state of Esuperstate
substates

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
OR States
•An OR-state can contain other states as its internal substates (hierarchical internal structure);• super OR-state is active, if and only if one of its immediate substates is active (exclusive or);• When the control enters a (super) OR-state, its default substate is entered and becomes active;• When the control leaves a (super) OR-state, all its substates become inactive!

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Default state mechanism
Try to hide internal structure from outside world! Default stateFilled circleindicates sub-state entered whenever super-state is entered.Not a state by itself!

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Combining history and default state mechanism
same meaning

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
History mechanism
For input m, S enters the state it was in before S was left (can be A, B, C, D, or E). If S is entered for the very first time, the default mechanism applies.History and default mechanisms can be used hierarchically.
(behavior different from last slide)
km

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
StateCharts: Concurrency
And Decomposition: Orthogonal product of A and D
A = {B, C}D = {E, F, G}Y = A X D

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
ConcurrencyConvenient ways of describing concurrency are required.AND-super-states: FSM is in all (immediate) sub-states of a super-state; Example:

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
And States

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Entering and leaving AND-super-states
Line-monitoring and key-monitoring are entered and left, when service switch is operated.
incl.

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Timers
Since time needs to be modeled in embedded systems, timers need to be modeled. In StateCharts, special edges can be used for timeouts.
If event a does not happen while the system is in the left state for 20 ms, a timeout will take place.
If event a does not happen while the system is in the left state for 20 ms, a timeout will take place.

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Using timers in answering machine

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Broadcast mechanism
Values of variables are visible to all parts of the StateChart model.New values become effective in phase 3 of the current step and are obtained by all parts of the model in the following step.
StateCharts implicitly assumes a broadcast mechanism for variables.
StateCharts is appropriate for local control systems (), but not for distributed applications for which updating variables might take some time ().
StateCharts implicitly assumes a broadcast mechanism for variables.
StateCharts is appropriate for local control systems (), but not for distributed applications for which updating variables might take some time ().

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
StarCharts (*charts)
Limitation on concurrency of HCFSM StateCharts loosely defines state transitions in concurrent
FSM’s to be simultaneous Broadcast mechanism Undetermined behavior on circular dependencies
*Charts are models of computation supporting concurrency better
Loosely synchronized concurrency model Dataflow
Tightly synchronized concurrency model Discrete Event Synchronous/Reactive (SR)

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
*Charts

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Architectures
Application-specific architectures Controller architecture, Datapath architecture, Finite-state machine with datapath (FSMD).
Single-purpose processor General-purpose processors
Complex instruction set computer (CISC)Reduced instruction set computer (RISC)Vector machineVery long instruction word computer (VLIW)Parallel processors

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
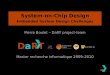
Processor technology
Processors vary in their customization for the problem at hand
total = 0for i = 1 to N loop total += M[i]end loop
General-purpose processor
Single-purpose processor
Application-specific processor
Desired functionality

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
General-purpose processors
Programmable device used in a variety of applications Also known as “microprocessor”
Features Program memory General datapath with large register file
and general ALU User benefits
Low time-to-market and NRE costs High flexibility
“Pentium” the most well-known, but there are hundreds of others
IR PC
Registerfile
GeneralALU
DatapathController
Program memory
Assembly code for:
total = 0 for i =1 to …
Control logic and
State register
Datamemory

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Single-purpose processors
Digital circuit designed to execute exactly one program a.k.a. coprocessor, accelerator or
peripheral Features
Contains only the components needed to execute a single program
No program memory Benefits
Fast Low power Small size
DatapathController
Control logic
State register
Datamemory
index
total
+

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Application-specific processors
Programmable processor optimized for a particular class of applications having common characteristics Compromise between general-purpose
and single-purpose processors Features
Program memory Optimized datapath Special functional units
Benefits Some flexibility, good performance, size
and power
IR PC
Registers
CustomALU
DatapathController
Program memory
Assembly code for:
total = 0 for i =1 to …
Control logic and
State register
Datamemory

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Controller Architecture (Mealy FSM)

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Datapath architecture

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
FSMD (FSM + DATA)

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
Conclusion
Different models focus on different aspects Proper model needs to represent system’s features Models are implemented in architectures Smooth transformation of models to architectures increases
productivity
Readings Assignment: D. Harel, "Statecharts: A Visual Formalism for Complex Systems", Sci. Comput.
Programming 8 (1987), 231-274. (Group: ??) Alain Girault, Bilung Lee, and Edward A. Lee, “Hierarchical Finite State Machines
with Multiple Concurrency Models”, IEEE Transactions On Computer-aided Design Of Integrated Circuits And Systems, Vol. 18, No. 6, June 1999. (Group: ??)

Dr. A
mr T
alaat
ELECT1002
So
C D
esign
References
D. Harel, "Statecharts: A Visual Formalism for Complex Systems", Sci. Comput. Programming 8 (1987), 231-274.
Alain Girault, Bilung Lee, and Edward A. Lee, “Hierarchical Finite State Machines with Multiple Concurrency Models”, IEEE Transactions On Computer-aided Design Of Integrated Circuits And Systems, Vol. 18, No. 6, June 1999.
+ many others