Embed Size (px)
Citation preview

Systems/Circuits
Why New Spinal Cord Plasticity Does Not Disrupt Old MotorBehaviors
Yi Chen,1 Lu Chen,1 Yu Wang,1 Xiang Yang Chen,1,2 and Jonathan R. Wolpaw1,2,3,4
1National Center for Adaptive Neurotechnologies, Wadsworth Center, New York State Department Health, Albany, New York 12201-0509, 2Department ofBiomedical Sciences, State University of New York, Albany, New York 12222, 3Department of Neurology, Stratton VA Medical Center, Albany, New York12208, and 4Department of Neurology, Neurological Institute, Columbia University, New York, New York 10032
When new motor learning changes the spinal cord, old behaviors are not impaired; their key features are preserved by additionalcompensatory plasticity. To explore the mechanisms responsible for this compensatory plasticity, we transected the spinal dorsalascending tract before or after female rats acquired a new behavior— operantly conditioned increase or decrease in the right soleusH-reflex—and examined an old behavior—locomotion. Neither spinal dorsal ascending tract transection nor H-reflex conditioningalone impaired locomotion. Nevertheless, when spinal dorsal ascending tract transection and H-reflex conditioning were combined, therats developed a limp and a tilted posture that correlated in direction and magnitude with the H-reflex change. When the right H-reflexwas increased by conditioning, the right step lasted longer than the left and the right hip was higher than the left; when the right H-reflexwas decreased by conditioning, the opposite occurred. These results indicate that ascending sensory input guides the compensatoryplasticity that normally prevents the plasticity underlying H-reflex change from impairing locomotion. They support the concept of thestate of the spinal cord as a negotiated equilibrium that reflects the concurrent influences of all the behaviors in an individual’s repertoire;and they support the new therapeutic strategies this concept introduces.
Key words: H-reflex; motor learning; operant conditioning; plasticity; rehabilitation; spinal cord
IntroductionIt has long been commonly assumed that learning depends en-tirely on plasticity in the brain. Nevertheless it is now clear thatthe neural substrate of a motor behavior often includes plasticityin the spinal cord as well (Wolpaw and Tennissen, 2001; Doyon et
al., 2009; Wolpaw, 2010, 2012; Dayan and Cohen, 2011; Penhuneand Steele, 2012; Pierrot-Deseilligny and Burke, 2012; Vahdat etal., 2015). Since the spinal cord, together with its analogousbrainstem nuclei, is the final common pathway for motor behav-iors, the spinal cord plasticity associated with the acquisition of anew motor behavior can affect existing (i.e., old) behaviors thatuse the same spinal neurons and synapses. Despite this, new be-haviors do not normally disrupt old ones; the normal CNS ac-quires and maintains an extensive repertoire of motor behaviorsthroughout life. Recent studies indicate that the brain and spinalcord plasticity associated with a new behavior includes compensa-tory plasticity that preserves the key features of old behaviors (e.g.,right/left symmetry in locomotion; Chen et al., 2011, 2014a). Com-pensatory spinal cord plasticity may also occur when trauma impairsmotor function (Frigon and Rossignol, 2009).
We hypothesize that sensory feedback to the brain guides thiscompensatory plasticity. When the spinal cord plasticity under-
Received March 21, 2017; revised July 7, 2017; accepted July 14, 2017.Author contributions: Y.C., Y.W., X.Y.C., and J.R.W. designed research; Y.C., L.C., Y.W., X.Y.C., and J.R.W. per-
formed research; Y.C., L.C., Y.W., X.Y.C., and J.R.W. analyzed data; Y.C., X.Y.C., and J.R.W. wrote the paper.This work was supported by the National Institutes of Health (HD36020. X.Y.C.; NS061823, X.Y.C. and J.R.W.;
NS22189, J.R.W.; 1P41EB018783, J.R.W.; HD32571, A.W. English), and a VA Merit Award (1 I01 BX002550, J.R.W.).We thank Drs. Jonathan S. Carp, Dennis J. McFarland, Aiko K. Thompson, and Elizabeth Winter Wolpaw for commentson the manuscript.
The authors declare no competing financial interests.Correspondence should be addressed to Xiang Yang Chen, Wadsworth Center, New York State Department
Health, Empire State Plaza, Albany, NY 12201-0509. E-mail: [email protected]:10.1523/JNEUROSCI.0767-17.2017
Copyright © 2017 the authors 0270-6474/17/378198-09$15.00/0
Significance Statement
The spinal cord provides a reliable final common pathway for motor behaviors throughout life. Until recently, its reliability wasexplained by the assumption that it is hardwired; but it is now clear that the spinal cord changes continually as new behaviors areacquired. Nevertheless, old behaviors are preserved. This study shows that their preservation depends on sensory feedback fromthe spinal cord to the brain: if feedback is removed, the acquisition of a new behavior may disrupt an old behavior. In sum, whena new behavior changes the spinal cord, sensory feedback to the brain guides further change that preserves old behaviors. Thisfinding contributes to a new understanding of spinal cord function and to development of new rehabilitation therapies.
8198 • The Journal of Neuroscience, August 23, 2017 • 37(34):8198 – 8206

lying a new behavior impairs an old behavior, the impairment isreflected in the sensory feedback associated with performance ofthe old behavior. Discrepancies between this feedback and thefeedback associated with normal performance guide further plas-ticity, which reduces the discrepancies and preserves the key fea-tures of the old behavior. This hypothesis predicts that the loss ofsensory feedback to the brain will allow the spinal cord plasticityunderlying a new behavior to impair an old behavior.
We tested this prediction by examining the impact of a newmotor behavior—an operantly conditioned increase or decreasein the soleus H-reflex (Wolpaw, 1987; Chen and Wolpaw, 1995;Thompson et al., 2009)—on an old motor behavior—locomo-tion—in rats in which midthoracic transection of the dorsal columnascending tract (DA rats) had greatly reduced proprioceptive feed-back to the brain (Sengul and Watson, 2014). Specifically, weassessed in DA rats the impact of H-reflex conditioning on twokey features of locomotion: right/left symmetry in step-cycle tim-ing and in hip height. In normal rats, H-reflex conditioning doesnot disturb these symmetries; that is, it does not cause the rats tolimp or to walk with a tilted posture (Chen et al., 2005, 2011). InDA rats, we found that the effects of H-reflex conditioning aresubstantially different.
Materials and MethodsExperimental design. Subjects were 32 young-adult female Sprague Daw-ley rats weighing 214 –266 g (mean, 237 g; SD, �15 g) at the beginning ofthe study. The use of female rats reduced the need for bladder expression in
the first few days after dorsal column ascending tract transection. H-reflexconditioning is comparable in females and males (Chen and Wolpaw, 1995,1997, 2002; Chen et al., 1996, 2005, 2014a). All procedures satisfied the Guidefor the Care and Use of Laboratory Animals (National Academies Press,Washington, D.C., 2011) and had been reviewed and approved by the Insti-tutional Animal Care and Use Committee of the Wadsworth Center.
Figure 1A shows the two studies. In Study 1, we transected the dorsalcolumn ascending tract at thoracic level T9 and then exposed rats toup-conditioning or down-conditioning of the right soleus H-reflex forthe standard 50 d period, or to no conditioning. In Study 2, we exposedrats to H-reflex up-conditioning or down-conditioning for 50 d, tran-sected the dorsal column ascending tract, and then continued the condi-tioning for 50 more days. We assessed the impact of these procedures onlocomotor right/left symmetries during walking on a treadmill.
The procedures for electrode implantation, dorsal column ascendingtract transection, postsurgical care, assessment of locomotion, H-reflexconditioning, histological evaluation, and data analysis have been de-scribed previously (for review, see Chen and Wolpaw, 2012; Thompsonand Wolpaw, 2014). They are summarized here.
Electrode implantation. Rats were implanted under general anesthesia[ketamine HCl (80 mg/kg, i.p.) and xylazine (10 mg/kg, i.p.)] and asepticconditions with chronic stimulating and recording electrodes as de-scribed previously (Chen and Wolpaw, 1995, 1997, 2002; Chen et al.,2001, 2002, 2005, 2006). To elicit the right soleus H-reflex, a siliconerubber nerve cuff containing a pair of fine-wire electrodes was placedaround the right posterior tibial (PT) nerve just above the triceps suraebranches. The cuff was closed by a suture that encircled the cuff. Torecord electromyographic (EMG) activity, a pair of fine-wire EMG elec-trodes with final 0.5 cm segments stripped and separated by 0.2– 0.3 cm
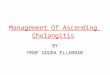
Figure 1. Study design. A, Studies 1 and 2. The times of electrode implantation, dorsal ascending tract (DA) transection, H-reflex data collection, locomotor assessment on the treadmill, andperfusion are indicated. B, Dorsal ascending tract transection. Camera lucida drawings and transverse sections of T9 spinal cord from a normal rat and a DA rat. DC, Dorsal columns; LC, lateral column;dotted areas at base of dorsal columns, CSTs. The dorsal ascending tract transection is apparent; CSTs and lateral columns are intact. C, Average (�SD) values for right/left step symmetry and hipheight symmetry for DA rats before H-reflex conditioning (1.0 is perfect symmetry). Dorsal ascending tract transection alone does not produce locomotor asymmetry.
Chen et al. • Why Spinal Plasticity Does Not Disrupt Behaviors J. Neurosci., August 23, 2017 • 37(34):8198 – 8206 • 8199

were placed in the right soleus muscle. The wires from the nerve cuff andthe muscle were led subcutaneously to a connector plug mounted on theskull. In addition, small (2 mm) dots were tattooed bilaterally on the skinover the lateral aspects of the knees, hips (i.e., trochanter major), and iliaccrests at the fifth lumbar vertebra to guide placement of markers duringlocomotor sessions (see below).
After surgery, the rat was kept warm and given an analgesic (Demerol,0.2 mg, i.m.), and was returned to its cage and allowed to eat and drink adlibitum (Chen and Wolpaw, 1995, 2002).
Spinal cord dorsal column ascending tract transection. Before H-reflexconditioning (Study 1), or after a 50 d exposure to H-reflex up-conditioning or down-conditioning (Study 2), each rat received a spinalcord dorsal ascending tract transection at T9 as described previously(Chen et al., 2001; Chen and Wolpaw, 2002). Briefly, under the anesthe-sia regimen described above, a partial dorsal laminectomy was per-formed at T8 –9 with minimal disturbance of the dural envelope. Theanimal was then mounted on a stereotaxic frame with the nearby dorsalprocesses rigidly fixed. The T9 transection was performed by electrocau-tery. The cauterizer, mounted on the stereotaxic frame, was activated inbrief pulses to minimize thermal damage to adjacent tissue. The transec-tion extended 0.4 mm to either side of the midline and 0.7 mm into thespinal cord from the dorsal surface; thus, it cut the dorsal ascending tractbilaterally and left the underlying corticospinal tract (CST) wholly orlargely intact. After transection, the site was rinsed with normal salineand covered with Durafilm to minimize connective tissue adhesions tothe dura. The muscle and skin were then sutured in layers. Care in thedays immediately after the transection included analgesia, antibiotics,bladder expression, and high-calorie dietary supplementation as previ-ously described in detail (Chen and Wolpaw, 1997, 2002; Chen et al.,2001, 2006, 2014a, 2014b). Bladder function returned 1–3 d (mean, 1.3 d;SD, �0.6 d) after transection. Open-field locomotion was assessed ac-cording to the rating scale of Basso et al. [1995; i.e., the BBB (Basso,Beattie, and Bresnahan) test; perfect score 21]. In all animals, the BBBscore returned to �20 in 2– 6 d (mean, 3.4 d; SD, �1.0 d). Thus, althoughkinematic analysis (see below) focused on the hindlimbs and did notassess the possible effects of dorsal ascending tract transection on fore-limb/hindlimb coordination (English, 1980, 1989), it was clear that dor-sal ascending tract transection did not produce a persistent visibledisturbance of locomotion.
Soleus H-reflex monitoring and conditioning. Data collection started�30 d after electrode implantation and continued 24 h/d, 7 d/week for�70 d (Study 1) or 120 d (Study 2; Fig. 1A). During this period, each ratlived in a standard rat cage with a 40 cm flexible cable attached to the skullplug. The cable, which allowed the animal to move freely about the cage,conveyed the wires from the electrodes to a commutator above the cage,and from there to an EMG amplifier and a stimulus isolation unit. The rathad ad libitum access to water and food, except that during H-reflexconditioning it received food mainly by performing the task describedbelow. Animal well-being was carefully checked several times each day,and body weight was measured weekly. Laboratory lights were dimmedfrom 9:00 P.M. to 6:00 A.M. each day.
Stimulus delivery and data collection were under the control of a com-puter system, which monitored ongoing EMG activity (gain, 1000�;bandpass, 100 –1000 Hz; sample rate, 5000 Hz) continuously 24 h/d,7 d/week, for the entire period of data collection. Whenever the absolutevalue (equivalent to the full-wave rectified value) of right soleus back-ground (i.e., ongoing) EMG activity remained within a defined range fora randomly varying 2.3–2.7 s period, the computer initiated a trial. Ineach trial, the computer stored the most recent 50 ms of EMG activityfrom the muscle (i.e., the background EMG interval), delivered a mono-phasic stimulus pulse to the nerve cuff, and stored the EMG activity foranother 100 ms. Stimulus pulse amplitude and duration were initially setto produce a maximum H-reflex and an M response (direct motor re-sponse) that was typically just above threshold. (The direct motor re-sponse is the EMG activity produced by the few motorneuron axonsdirectly excited by the nerve cuff stimulus.) In each rat, pulse durationremained fixed (typically 0.5 ms) throughout study. Pulse amplitude wasadjusted by the computer after each trial to maintain the right soleus Mresponse [i.e., average absolute value of EMG activity in the M-response
interval (typically 1.5– 4.0 ms after PT nerve stimulation)] unchanged ata target size. This ensured that the effective strength of the nerve stimuluswas stable throughout the study despite any changes that occurred innerve-cuff electrode impedances or in other factors (Wolpaw, 1987;Chen and Wolpaw, 1995). H-reflex size was calculated as average abso-lute value of EMG activity in the H-reflex interval (typically 5.5–10.0 msafter stimulation) minus average absolute value of background EMGactivity at the time of stimulation, and was expressed in units of averageabsolute value of background EMG activity at the time of stimulation.
To determine the initial size of the H-reflex, data were collected for20 d under the control mode, in which the computer simply digitized andstored soleus EMG activity for 100 ms following the stimulus. Then, therat was exposed to right soleus H-reflex up-conditioning (HRup rats) ordown-conditioning (HRdown rats) for 50 d (Study 1) or 100 d (Study 2;Fig. 1A). Under the up-conditioning or down-conditioning mode, thecomputer gave a reward (i.e., a 20 mg food pellet) 200 ms after PT nervestimulation if the absolute value of right soleus EMG activity in the H-reflexinterval was above (up-conditioning) or below (down-conditioning) acriterion value. The criterion value was set and adjusted as needed eachday so that the rat received an amount of food that met its daily require-ment [e.g., �700 reward pellets (i.e., 14 g) per day for a 300 g rat].
In every rat, the impact on H-reflex size of the initial 50 d of condi-tioning was determined by expressing the average daily H-reflex size forDays 41–50 of conditioning in percentage of the average daily H-reflexsize for the final 10 control-mode days. For example, a value of 150%indicated that the H-reflex had increased by 50%. In the Study-2 rats, theimpact on H-reflex size of the second 50 d of conditioning (i.e., afterdorsal ascending tract transection) was determined by expressing theaverage daily H-reflex size for Days 91–100 of conditioning in percentageof the average daily H-reflex size for Days 41–50.
Locomotor data collection. At the beginning of study, before electrodeimplantation, each rat learned to walk quadrupedally on a motor-driventreadmill at 9 –13 m/min over 1–2 training sessions of 20 –30 min each(Chen et al., 2005, 2006, 2011, 2014a, 2014b). These training sessionswere effective: when the rats were placed on the treadmill for actuallocomotor data collection later on, they typically walked immediately.Subsequently, locomotor data were collected from each rat in two (Study1) or three (Study 2) treadmill sessions as shown in Figure 1A.
Before each locomotor session, the hindlimbs were shaved and, guidedby the tattooed dots (see above), 3 mm reflective adhesive markers wereplaced on the lateral aspects of the fifth metatarsophalangeal joint, the anklejoint (i.e., lateral malleolus), the knee joint, the hip joint (i.e., trochantermajor), the iliac crest at the fifth lumbar vertebra, and the midpoint betweenthe ankle and knee joints of each leg to enable later analysis of locomotorkinematics. In each rat, treadmill speed was the same for all sessions. Duringlocomotion, soleus EMG activity was continuously recorded (bandpass,100–1000 Hz), digitized (4000 Hz), and stored. In addition, locomotor ki-nematics were recorded bilaterally with a 3-D video data-collection andanalysis system (100 frames/s; Vicon Motion Systems). Data were col-lected under two conditions. One was undisturbed locomotion. In theother, the soleus H-reflex was elicited just after the middle of the stancephase (i.e., the “locomotor H-reflex”) as described by Chen et al. (2005,2006, 2014a, 2014b). Approximately 5 min (i.e., �500 step cycles) of datawere collected under each condition. At the end of each session, thefemur and tibia lengths in each leg were measured externally.
Analysis of locomotor data. The EMG activity recorded during undis-turbed locomotion was rectified and used to calculate soleus locomotorH-reflex size and (after low-pass filtering by a 50 ms running average)soleus locomotor burst amplitude. As for the H-reflex elicited in theconditioning protocol (i.e., the “protocol H-reflex”), locomotor H-reflexsize was calculated as average absolute value of EMG activity in theH-reflex interval minus average absolute value of background EMG ac-tivity at the time of stimulation, and was expressed in units of averageabsolute value of background EMG activity (Chen et al., 2005). Soleuslocomotor burst amplitude was calculated as average absolute value ofEMG activity between burst onset and offset and was expressed in micro-volts (Chen et al., 2005, 2006).
The concurrent 3-D locomotor kinematic data were analyzed withVicon Motus software (Vicon Motion Systems) to assess two measures
8200 • J. Neurosci., August 23, 2017 • 37(34):8198 – 8206 Chen et al. • Why Spinal Plasticity Does Not Disrupt Behaviors

that reflect the right/left symmetry of the step cycle. The first measure wasstep symmetry, defined as the average time from right foot contact (RFC)to left foot contact (LFC) divided by the average time from LFC and RFC(i.e., a value of 1.0 indicates that the step cycle is perfectly symmetrical).The second measure was hip-height symmetry, defined as the averageright hip height during right stance divided by the average left hip heightduring left stance (i.e., a value of 1.0 indicates that the hip heights areequal). We selected these measures for two reasons. First, they are clearlykey features of locomotion: if step symmetry differs from 1.0, the rat islimping; and if hip height differs from 1.0, the rat is tilted as it walks[furthermore, such asymmetries might have long-term musculoskeletalconsequences (e.g., osteoarthritis in the spine or limbs)]. Second, in theabsence of appropriate compensatory plasticity, these key featuresseemed likely to be impaired by unilateral conditioning of the soleusH-reflex (Chen et al., 2011). For these reasons, they appeared to providea good test of our hypothesis that the dorsal column ascending tractsguide the compensatory plasticity that prevents H-reflex conditioningfrom impairing locomotion: the hypothesis predicts that, in DA rats,H-reflex conditioning should produce asymmetry in the step cycle and inhip height.
Perfusion, postmortem examination, and lesion verification. At the endof data collection, each rat was anesthetized, the right soleus muscle wasinjected with cholera toxin subunit B-conjugated Alexa Fluor 488 (forretrograde labeling of soleus motoneurons), and 3 d later the rat wasperfused through the heart for postmortem examination and lesion ver-ification, and for later anatomical and immunohistochemical studies(Wang et al., 2006, 2009).
The nerve cuff, EMG electrodes, and tibial nerve were examined, andthe right and left soleus muscles were removed and weighed. The femurand tibia were exposed and their lengths were measured. The spinal cordwas removed and blocks, including the transection, were embedded inOCT (optimum cutting temperature) compound (Tissue-Tek) and fro-zen on dry ice. Transverse 20-�m-thick serial sections from these blockswere cut with a cryostat, mounted onto precoated glass slides (Super-frost, Thermo Fisher Scientific), and analyzed to define the location andsize of the dorsal ascending tract transection and any associated damageto the CST or other tracts (Chen and Wolpaw, 1997, 2002; Chen et al.,2002).
Statistical analysis. The data consist of protocol H-reflexes (i.e.,H-reflex sizes measured throughout the day whenever the rats satisfiedthe background EMG criteria), locomotor H-reflexes (i.e., H-reflex sizesmeasured during the stance phase of locomotion), soleus locomotorEMG burst amplitudes, and putative key locomotor features (i.e., right/left symmetry in step-cycle timing, right/left symmetry in hip height).
The first objective was to compare the impact of H-reflex up or downconditioning on these measures in normal rats to the impact in DA rats.We compared the rat groups (i.e., up-conditioned normal rats, down-conditioned normal rats, unconditioned DA rats, up-conditioned DArats, down-conditioned DA rats) by ANOVA. The normal rats were theStudy-2 rats before dorsal ascending tract transection; the DA rats werethe Study-1 rats (Fig. 1A). If the groups differed significantly, we thencompared for each group the data before conditioning to those at the endof up-conditioning or down-conditioning or no conditioning by pairedt test.
The second objective was to evaluate for normal rats and for DA ratsthe correlations between conditioning-induced change in H-reflex sizeand changes in key locomotor features. The normal rats were the Study-2rats before dorsal ascending tract transection; the DA rats were theStudy-1 rats and the post-dorsal ascending tract transection Study-2 rats(Fig. 1A). These correlations were evaluated by linear regression.
ResultsAnimal well-being and postmortem examinationAnimals remained healthy and active throughout data collection.Body weight increased from 214 to 266 g (mean, 237 g; SD, �15 g) atthe beginning of the study to 295– 459 g (mean, 347 g; SD, �40 g)at the time of perfusion. Right and left soleus muscle weights(measured as percentage of body weight) averaged 0.049% (SD,
�0.009%) for the right and 0.048% (SD, �0.008%) for the left.They did not differ significantly from each other (p � 0.39 bypaired t test), and did not differ from soleus muscle weights ofnormal rats (Chen and Wolpaw, 1995, 1997, 2002; Chen et al.,1996, 1999, 2001, 2002, 2005, 2006). Examination of the nervecuffs revealed the expected connective tissue investment of thewires and apparent good preservation of the nerve inside the cuff.
Dorsal ascending tract transectionQuantitative analysis indicated that dorsal ascending tract tran-section was usually complete or nearly complete in most of therats. On average, 19% (SD, �20%; range, 0 – 67%) of the rightand 16% (SD, �19%; range, 0 – 60%) of the left dorsal ascendingtract remained. Figure 1B shows a T9 transverse section from arepresentative rat. As Figure 1C also shows, dorsal ascending tracttransection itself did not disturb the normal right/left symmetriesin step-cycle timing or hip height during locomotion.
The right and left lateral columns were entirely intact in all 32rats; and the right and left CSTs were entirely intact in 26 rats. Sixrats had sustained CST damage, indicating that the transectionhad extended too deep. This CST damage is potentially impor-tant because the CST is essential for acquisition and maintenanceof H-reflex down-conditioning and for acquisition of up-con-ditioning (Chen and Wolpaw, 2002; Chen et al., 2002, 2003). Inthese six rats, the percentages of the right and left CST that re-mained were 100 and 69%, 88 and 68%, 68 and 100%, 43 and38%, 11 and 31%, and 0 and 0%, respectively. The latter threerats, with large or complete CST lesions, were excluded from thedata analysis.
The rats studiedThe Study-1 results include data from 18 DA rats, 6 exposed toH-reflex up-conditioning, 6 to down-conditioning, and 6 to noconditioning (NC). The Study-2 results include data from 10 ratsexposed to either up-conditioning (5 rats) or down-conditioning(5 rats) before dorsal ascending tract transection and then con-tinued to be conditioned for another 50 d (one additionalStudy-2 down-conditioned rat did not finish the study due tobreakage of the nerve-cuff wires).
For the purpose of this investigation (to determine whetherthe loss of sensory feedback to the brain caused by dorsal ascend-ing tract transection allows the spinal cord plasticity underlyingthe new behavior of H-reflex conditioning to impair the old be-havior of locomotion), the results provide three sets of data. Thedata gathered from the Study-2 rats before dorsal ascending tracttransection assess the impact of H-reflex conditioning on loco-motion in normal rats. The data gathered from the Study-1 ratsassess the impact of H-reflex conditioning on locomotion in ratsin which the dorsal ascending tract was transected before condi-tioning. Finally, the data gathered from the Study-2 rats afterdorsal ascending tract transection assess the impact of furtherH-reflex conditioning on locomotion in rats in which the dorsalascending tract was transected after the initial 50 d of H-reflexconditioning had increased or decreased the H-reflex.
H-reflex conditioningAs Figure 2A shows, conditioning had its expected effects on theright soleus H-reflex in both the DA rats of Study 1 and the not-yet-transected (i.e., normal) rats of Study 2: H-reflex size changedgradually in the rewarded direction over the 50 d period of up-conditioning (HRup rats) or down-conditioning (HRdown rats).Down-conditioning decreased the H-reflexes of the Study-2 ratssomewhat more than those of the Study-1 rats, although this
Chen et al. • Why Spinal Plasticity Does Not Disrupt Behaviors J. Neurosci., August 23, 2017 • 37(34):8198 – 8206 • 8201

difference did not reach significance (p �0.06 by t test). In neither the Study-1 ratsnor the Study-2 rats did the averageH-reflex increases (or decreases) in the fi-nal 10 d of the 50 d period of up-conditioning (or down-conditioning) differsignificantly from those in the many nor-mal rats studied previously (for review, seeChen and Wolpaw, 2012; Thompson andWolpaw, 2014).
After the Study-2 rats underwent dor-sal ascending tract transection and condi-tioning continued for another 50 d, theH-reflex tended to rise further in theHRup rats (p � 0.07 by paired t test) andremained approximately the same in theHRdown rats (in the Study-2 rats, thetransient increase 1–2 d after dorsal as-cending tract transection is a nonspecificeffect of the surgery and/or anesthesia;Chen et al., 2001).
Locomotor H-reflexes and soleuslocomotor EMG activityIn the DA rats of Study 1 and the not-yet-transected (i.e., normal) rats of Study 2,the change in the H-reflex elicited duringthe conditioning protocol (i.e., the protocolH-reflex) was accompanied by correspond-ing change in the locomotor H-reflex (i.e.,the H-reflex elicited during the stancephase of locomotion) and in the right soleuslocomotor burst, which supports stance.Figure 2B summarizes and illustrates theseeffects. Thus, in DA rats as in normal rats,H-reflex conditioning changed the soleuscontribution to locomotion.
Locomotor symmetryDespite their similarity in the effects ofH-reflex conditioning on H-reflexes andsoleus locomotor EMG activity, normalrats and DA rats differed markedly in theimpact of conditioning on locomotorsymmetry. Figure 3A summarizes theseresults. As expected in normal rats (Chenet al., 2005, 2011), H-reflex conditioningdid not affect the normal right/left sym-metries in step-cycle timing or hip height
Figure 2. H-reflex conditioning and its effects on soleus locomotor EMG activity. A, Average (�SE) H-reflex size (in percentageof average control value) for HRup rats (red up-triangles) and HRdown rats (blue down-triangles) of Study 1 (solid symbols) andStudy 2 (open symbols) for each day during the final 10 d of the control-mode period and the 50 (Study 1) or 100 d (Study 2) of HRupor HRdown conditioning. Dorsal ascending tract transection in the Study-2 rats is indicated. B, Effects of H-reflex conditioning onH-reflexes and locomotor bursts in DA rats. Top: Average (�SE) protocol H-reflexes (i.e., the H-reflexes measured in the
4
conditioning protocol), locomotor H-reflexes (i.e., theH-reflexes measured in the stance phase of locomotion), andsoleus locomotor bursts for the DA rats of Study 1 at the end ofHRup or HRdown conditioning (***p � 0.001, **p � 0.01,*p � 0.05 vs initial (i.e., preconditioning) value by paired ttest). Bottom, Data from representative HRup and HRdown DArats. Average post-stimulus EMG activity in the conditioningprotocol (left) or during locomotion (middle), and average lo-comotor bursts (right), in the control mode (solid) and afterconditioning (dashed) are shown. M responses and H-reflexesare indicated. The effects of conditioning on H-reflexes andlocomotor bursts are evident.
8202 • J. Neurosci., August 23, 2017 • 37(34):8198 – 8206 Chen et al. • Why Spinal Plasticity Does Not Disrupt Behaviors

Figure 3. Impact of H-reflex conditioning on key locomotor features in normal rats and in DA rats. A, left, Average (�SE) right/left step symmetry after up-conditioning or down-conditioningor no conditioning (NC; in percentage of initial value). In normal rats (Study-2 rats before dorsal ascending tract transection), conditioning does not affect symmetry. In DA rats (Study-1 rats),conditioning produces step asymmetry: up-conditioning increases and down-conditioning decreases the ratio of the time between RFC and LFC to the time between LFC and RFC. Right, Average(�SE) right/left hip height symmetry at the end of up-conditioning or down-conditioning or no conditioning (in percentage of initial value). In normal rats, conditioning does not affect hip-heightsymmetry. In DA rats, the right hip is higher after up-conditioning and lower after down-conditioning (**p � 0.01, *p � 0.05 vs initial value by paired t test). B, Step symmetry (top) and hip-heightsymmetry (bottom) versus final H-reflex size after up-conditioning (red) or down-conditioning (blue) for normal rats (left) and DA rats (right). The normal rats are the Study-2 rats before dorsalascending tract transection. Their final H-reflex size is their H-reflex size at the end of the initial 50 d of conditioning just before dorsal ascending tract transection; it is expressed in percentage of theirH-reflex size for the control mode period before conditioning. The DA rats with solid symbols are the Study-1 rats. Their final H-reflex size is their H-reflex size at the end of the 50 d of conditioning;it is expressed in percentage of their H-reflex size for the control-mode period before conditioning. The DA rats with open symbols are the Study-2 rats after dorsal ascending tract transection. Theirfinal H-reflex size is their H-reflex size at the end of the second 50 d of conditioning; it is expressed in percentage of their H-reflex size at the end of the initial 50 d of conditioning just before dorsalascending tract transection. In normal rats, H-reflex up-conditioning or down-conditioning does not affect step or hip symmetry. In contrast, in DA rats transected before conditioning (solidsymbols), conditioning creates asymmetries that correlate with the direction and magnitude of the 50 d of conditioning. Similarly, in DA rats transected after (Figure legend continues.)
Chen et al. • Why Spinal Plasticity Does Not Disrupt Behaviors J. Neurosci., August 23, 2017 • 37(34):8198 – 8206 • 8203

in the not-yet-transected Study-2 rats. After 50 d of up-conditioningor down-conditioning (i.e., just before dorsal ascending tract tran-section), right/left step-cycle timing and hip heights remained sym-metrical. In contrast, in the DA rats of Study 1, H-reflex conditioningproduced significant right/left asymmetries in step-cycle timing andhip heights that correlated with the direction of H-reflex change. Up-conditioning made the right step last longer than the left and itmade the right hip higher than the left; down-conditioning madethe right step briefer than the left and the right hip lower than theleft. Furthermore, when, after 50 d of conditioning, the normalrats of Study 2 underwent dorsal ascending tract transection andcontinued to be conditioned for another 50 d, those that devel-oped further change in H-reflex size also developed correspond-ing asymmetries in step-cycle timing and hip height.
Figure 3B shows for normal rats and DA rats the correlationsbetween H-reflex change and right/left symmetries in step-cycletiming and hip height. In normal rats, H-reflex change had nodetectable effect. In DA rats, H-reflex conditioning producedasymmetries in both measures that correlated with the directionand magnitude of the concurrent change in H-reflex size. Thus,the more the H-reflex increased with up-conditioning, the morethe right step became longer than the left and the right hip be-came higher; and the more the H-reflex decreased with down-conditioning, the more the right step became shorter than the leftand the right hip became lower. Figure 3C,D illustrates theseeffects.
In summary, H-reflex conditioning does not disturb locomo-tion in normal rats. In DA rats, it does disturb locomotion: thestep-cycle asymmetry is manifested as a limp and the hip-heightasymmetry is manifested as a tilted hindlimb posture. The direc-tion and magnitude of these abnormalities correlate with thedirection and magnitude of H-reflex change.
DiscussionThe primary significance of these results is their contributiontoward a new understanding of spinal cord function. The work ofrecent decades has made it clear that the spinal cord changesthroughout life as growth and aging occur, as new behaviors areacquired, and in response to trauma and disease (for review, seeWolpaw and Tennissen, 2001; Wolpaw, 2010, 2012; Pierrot-Deseilligny and Burke, 2012). Thus, the traditional concept of ahardwired spinal cord that does not change after early develop-ment is no longer viable. However, it has not been clear how acontinually changing spinal cord remains a reliable final com-mon pathway for all the behaviors in an individual’s repertoire.The present results help answer this question. They thereby sup-port a new concept of spinal cord function that reconciles itslong-recognized reliability with its newly appreciated plasticity.
Maintenance of motor behaviorsThe acquisition of a new motor behavior can certainly affect anold behavior. The distinctive walk of professional ballet dancers isa striking example (Kilgannon, 1996). The changes in spinal re-flex pathways (Nielsen et al., 1993; and presumably in other path-ways) that underlie the acquisition of this specialized behaviorchange the old behavior of locomotion. Nevertheless, locomo-tion is not disrupted; it looks different (i.e., its kinematicschange), but it remains satisfactory. In rats, soleus H-reflex con-ditioning has an analogous impact. Because it changes the spinalpathway of the reflex (for review, see Wolpaw and Lee, 1989;Thompson and Wolpaw, 2014), it affects the pathway’s contribu-tion to other behaviors, such as locomotion. Locomotor EMGactivity and kinematics change (Chen et al., 2005, 2011; Fig. 2B).Nevertheless, in normal rats, the features that characterize nor-mal locomotion (e.g., right/left symmetry in step timing and hipheight) are preserved. As Bernstein (1967) emphasized, motorbehaviors have key features that are much more precisely con-trolled than other features. This principle has been formalized inthe “uncontrolled manifold” concept, which partitions the vari-ance in kinematic variables into the part that impairs key features(e.g., right/left step symmetry) and the part that does not (Scholzand Schoner, 1999; Latash et al., 2007; Chang et al., 2009).
Recent studies indicate that, when acquisition of a new behav-ior (i.e., soleus H-reflex conditioning) changes the lumbosacralspinal cord, the preservation of normal locomotion entails com-pensatory plasticity involving other spinal pathways (Chen et al.,2011, 2014a). The resulting changes in locomotor EMG activityand kinematics preserve key locomotor features (e.g., right/leftsymmetry in hip height). For example, when soleus H-reflexdown-conditioning decreases ankle angle (i.e., decreases plantar-flexion) during locomotion (which by itself would lower the hip),an associated increase in hip extension may preserve hip height(Chen et al., 2011).
Studies that take advantage of the anatomical separation be-tween the brain and spinal cord illuminate the compensatoryplasticity that preserves old behaviors. After denervation of animportant leg muscle in cats, locomotion gradually recovers. Byassessing the locomotor impact of subsequent spinal cord tran-section, Carrier et al. (1997) showed that this recovery dependson plasticity in both the brain and spinal cord. Frigon and Ros-signol (2009) further extended this work. In another example,unilateral operant down-conditioning of the triceps suraeH-reflex in monkeys has little or no effect on the contralateralH-reflex (Wolpaw et al., 1989, 1993). Terminal studies that as-sessed the impact of spinal cord transection showed that the pres-ervation of an unchanged contralateral H-reflex depended onplasticity in both the brain and spinal cord (Wolpaw and Lee,1989). Thus, just as the initial acquisition of a motor behaviormay involve plasticity in both the brain and spinal cord, its sub-sequent preservation as further behaviors are acquired may do soas well. Each behavior rests on a network of brain and spinalplasticity that changes as needed to maintain the key features ofthe behavior.
The present results illuminate the process that maintains amotor behavior; they show that this process is driven and guidedby sensory feedback from the spinal cord to the brain. Dorsalascending tract transection, which eliminates much of that feed-back, allows H-reflex conditioning to disrupt key locomotor fea-tures, such as step-cycle and hip-height symmetry, producing alimp and a tilted posture. After dorsal ascending tract transection,the brain no longer receives feedback reflecting the impact ofH-reflex conditioning on locomotion; and/or the limited feed-
4
(Figure legend continued.) 50 d of conditioning, the subsequent 50 d of conditioning createsasymmetries that correlate with any further change in H-reflex size. C, Step-cycle symmetry intwo DA rats of Study 1 before (black) and after up-conditioning (HRup rat; red) or down-conditioning (HRdown rat; blue). Symmetry values for five consecutive step cycles are shown.Perfect symmetry is 1.0. Before conditioning, the step cycle is symmetrical in both rats; afterconditioning, the right step is longer than the left in the HRup rat and shorter in the HRdown rat.Thus, the rats are limping. D, Average right and left hindlimb positions during stance in two DArats before and after up-conditioning or down-conditioning. The rats walk toward the right. Hip(H), knee (K), and ankle (A) angles are marked. Before conditioning, right and left hip heightsare equal. After up-conditioning, the right hip is higher than the left; after down-conditioning,it is lower. Thus, the HRup rat tilts to the left; and the HRdown rat tilts to the right.
8204 • J. Neurosci., August 23, 2017 • 37(34):8198 – 8206 Chen et al. • Why Spinal Plasticity Does Not Disrupt Behaviors

back that it does receive is inadequate for guiding appropriatecompensatory plasticity. The result is that appropriate compen-sation does not occur and locomotion becomes abnormal.
In a similar fashion, loss or distortion of ascending sensoryfeedback may contribute to the disabilities of people with spinalcord injury, stroke, or other disorders that impair interactionsbetween the brain and the spinal cord. These disorders do notmerely impair the brain’s descending control over the spinalcord, they can also impair the ascending sensory feedback thatguides this control. Thus, motor disabilities may occur and per-sist not only because the disorder creates them, but also becausethe disorder disrupts the feedback needed to guide their correc-tion and/or because the limited feedback that remains is inade-quate for guiding appropriate compensatory plasticity.
Function of the spinal cordBy demonstrating that dorsal ascending tract transection allowsH-reflex conditioning to disrupt locomotion, the present resultshelp explain how the highly plastic spinal cord remains a reliablefinal common pathway for motor behaviors throughout life. Wehave recently proposed that new motor behaviors are acquiredand old behaviors are preserved through a process in which thesubstrate of brain and spinal plasticity underlying each behavioroperates as an independent agent: each behavior repeatedly in-duces spinal cord (and brain) plasticity that maintains its keyfeatures despite the plasticity induced by other behaviors (Wol-paw, 2010; Thompson et al., 2013; Chen et al., 2014a). Wheneverthe behavior is performed, the associated sensory feedback iscompared with the expected feedback (i.e., the feedback associ-ated with normal performance). This comparison (which mayoccur in the cerebellum; D’Angelo et al., 2016; Popa et al., 2016)detects deviations from the key features of the behavior. Thesedeviations constitute error signals that guide appropriate changesin the brain and spinal substrate responsible for the behavior.
As a result, the spinal cord is continually modified by themany behaviors that use it. The aggregate process is a negotiationamong the behaviors: they negotiate the properties of the spinalneurons and synapses that they all use. The negotiation ensuresthat spinal neuronal and synaptic properties are maintained in anequilibrium—a negotiated equilibrium—that serves all the be-haviors in an individual’s repertoire (Wolpaw, 2010; Thompsonet al., 2013; Chen et al., 2014a). This model assumes that sensoryfeedback to the brain guides the plasticity that maintains eachbehavior despite the plasticity produced by other behaviors.Thus, the model predicts that loss of sensory feedback will allowthe spinal cord plasticity underlying a new behavior to impair oldbehaviors. The present results confirm this prediction.
Experimental and clinical uses of H-reflex conditioningThis demonstration of the importance of ascending sensory in-put in preserving an old behavior when new learning changes thespinal cord was made possible by a distinctive attribute of theH-reflex conditioning protocol. Unlike most motor learning,H-reflex conditioning is not guided by the ascending somatosen-sory feedback generated during performance; it is guided princi-pally by the food reward (i.e., by the visual, auditory, and/orgustatory input associated with the reward). Thus, H-reflex con-ditioning can occur in DA rats, in which its impact on old behav-iors is apparent.
This attribute of the conditioning protocol underlies itspromising therapeutic applications. In the present study, the pro-tocol was used to disrupt normal locomotion. Applied in a clin-ical context, it represents a new therapeutic approach called
“targeted neuroplasticity” (Thompson and Wolpaw, 2014, 2015). Inrats in which a lateralized spinal cord injury has weakened stanceon one side and created a limp, up-conditioning of the soleusH-reflex on that side strengthens stance and restores locomotorsymmetry (Chen et al., 2006). Similarly, in people with spasticitydue to incomplete spinal cord injury, down-conditioning of thehyperactive soleus H-reflex reduces limping and increases walk-ing speed (Thompson et al., 2013). Furthermore, the global im-provement in their walking cannot be attributed simply to theplasticity that reduces the H-reflex (i.e., the plasticity targeted bythe reward contingency). The introduction of a new motor be-havior—a smaller soleus H-reflex—appears to trigger a widerprocess (i.e., a new negotiation) that leads to beneficial plasticityat many sites and improves locomotor muscle activity in theproximal and distal muscles of both legs (Thompson et al., 2013).Recent animal studies provide additional evidence for and insightinto this initiation of wider beneficial plasticity (Chen et al.,2014b).
SummaryThis study helps to explain how the highly plastic spinal cordreliably serves all the motor behaviors in an individual’s reper-toire. By showing that dorsal ascending tract transection allowsthe acquisition of a new behavior to disrupt an old behavior, theresults support the conclusion that sensory feedback to the brainenables each behavior to exert continuing influence over spinalneuronal and synaptic properties and to thereby ensure its con-tinued satisfactory performance.
ReferencesBasso DM, Beattie MS, Bresnahan JC (1995) A sensitive and reliable loco-
motor rating scale for open field testing in rats. J Neurotrauma 12:1–21.CrossRef Medline
Bernstein NA (1967) The co-ordination and regulation of movements. Ox-ford: Pergamon.
Carrier L, Brustein E, Rossignol S (1997) Locomotion of the hindlimbs afterneurectomy of ankle flexors in intact and spinal cats: model for the studyof locomotor plasticity. J Neurophysiol 77:1979 –1993. Medline
Chang YH, Auyang AG, Scholz JP, Nichols TR (2009) Whole limb kinemat-ics are preferentially conserved over individual joint kinematics after pe-ripheral nerve injury. J Exp Biol 212:3511–3521. CrossRef Medline
Chen XY, Wolpaw JR (1995) Operant conditioning of H-reflex in freelymoving rats. J Neurophysiol 73:411– 415. Medline
Chen XY, Wolpaw JR (1997) Dorsal column but not lateral column transec-tion prevents down-conditioning of H reflex in rats. J Neurophysiol 78:1730 –1734. Medline
Chen XY, Wolpaw JR (2002) Probable corticospinal tract control of spinalcord plasticity in the rat. J Neurophysiol 87:645– 652. CrossRef Medline
Chen XY, Wolpaw JR (2012) Operant conditioning of spinal cord reflexes inrats. In: Animal models of acute neurological injuries. II: injury andmechanistic assessments. (Chen J, Xu ZC, Xu XM, Zheng JH, eds), Chap-ter 44, 543–551. New York: Humana Press.
Chen XY, Wolpaw JR, Jakeman LB, Stokes BT (1996) Operant conditioningof H-reflex in spinal-cord injured rats. J Neurotrauma 13:755–766.CrossRef Medline
Chen XY, Wolpaw JR, Jakeman LB, Stokes BT (1999) Operant conditioningof H-reflex increase in spinal-cord injured rats. J Neurotrauma 16:175–186. CrossRef Medline
Chen XY, Feng-Chen KC, Chen L, Stark DM, Wolpaw JR (2001) Short-termand medium-term effects of spinal cord tract transections on soleusH-reflex in freely moving rats. J Neurotrauma 18:313–327. CrossRefMedline
Chen XY, Carp JS, Chen L, Wolpaw JR (2002) Corticospinal tract transec-tion prevents operantly conditioned increase of H-reflex in rats. ExpBrain Res 144:88 –94. CrossRef Medline
Chen XY, Chen L, Wolpaw JR (2003) Conditioned H-reflex increase per-sists after transection of the main corticospinal tract in rats. J Neuro-physiol 90:3572–3578. CrossRef Medline
Chen et al. • Why Spinal Plasticity Does Not Disrupt Behaviors J. Neurosci., August 23, 2017 • 37(34):8198 – 8206 • 8205

Chen Y, Chen XY, Jakeman LB, Schalk G, Stokes BT, Wolpaw JR (2005) Theinteraction of a new motor skill and an old one: H-reflex conditioning andlocomotion in rats. J Neurosci 25:6898 – 6906. CrossRef Medline
Chen Y, Chen XY, Jakeman LB, Chen L, Stokes BT, Wolpaw JR (2006) Op-erant conditioning of H-reflex can correct a locomotor abnormality afterspinal cord injury in rats. J Neurosci 26:12537–12543. CrossRef Medline
Chen Y, Chen L, Wang Y, Wolpaw JR, Chen XY (2011) Operant condition-ing of rat soleus H-reflex oppositely affects another H-reflex and changeslocomotor kinematics. J Neurosci 31:11370 –11375. CrossRef Medline
Chen Y, Chen L, Liu R, Wang Y, Chen XY, Wolpaw JR (2014a) Locomotorimpact of beneficial or non-beneficial H-reflex conditioning after spinalcord injury. J Neurophysiol 111:1249 –1258. CrossRef Medline
Chen Y, Chen L, Wang Y, Wolpaw JR, Chen XY (2014b) Persistent benefi-cial impact of H-reflex conditioning in spinal cord injured rats. J Neuro-physiol 112:2374 –2381. CrossRef Medline
D’Angelo E, Mapelli L, Casellato C, Garrido JA, Luque N, Monaco J, PrestoriF, Pedrocchi A, Ros E (2016) Distributed circuit plasticity: new clues forthe cerebellar mechanisms of learning. Cerebellum 15:139 –151. DOI10.1007/s12311-015-0711-7. CrossRef Medline
Dayan E, Cohen LG (2011) Neuroplasticity subserving motor skill learning.Neuron 72:443– 454. CrossRef Medline
Doyon J, Bellec P, Amsel R, Penhune V, Monchi O, Carrier J, Lehericy S,Benali H (2009) Contributions of the basal ganglia and functionally re-lated brain structures to motor learning. Behav Brain Res 199:61–75.CrossRef Medline
English AW (1980) Interlimb coordination during stepping in the cat: ef-fects of dorsal column section. J Neurophysiol 44:270 –279. Medline
English AW (1989) Interlimb coordination during locomotion. Integ Com-par Biol 29:255–266.
Frigon A, Rossignol S (2009) Partial denervation of ankle extensors prior tospinalization in cats impacts the expression of locomotion and the phasicmodulation of reflexes. Neuroscience 158:1675–1690. CrossRef Medline
Kilgannon C (1996) By their walk shall you know them. New York Times,November 10. Available at: http://www.nytimes.com/1996/11/10/nyregion/by-their-walk-shall-you-know-them.html
Latash ML, Scholz JP, Schoner G (2007) Toward a new theory of motorsynergies. Motor Control 11:276 –308. CrossRef Medline
Nielsen J, Crone C, Hultborn H (1993) H-reflexes are smaller in dancersfrom the Royal Danish Ballet than in well-trained athletes. Eur J ApplPhysiol Occup Physiol 66:116 –121. CrossRef Medline
Penhune V, Steele CJ (2012) Parallel contributions of cerebellar, striatal andM1 mechanisms to motor sequence learning. Behav Brain Res 226:579 –591. CrossRef Medline
Pierrot-Deseilligny E, Burke D (2012) The circuitry of the human spinalcord: spinal and corticospinal mechanisms of movement. Cambridge,UK: Cambridge UP.
Popa LS, Streng ML, Hewitt AL, Ebner TJ (2016) The errors of our ways:understanding error representations in cerebellar-dependent motorlearning. Cerebellum 15:93–103. CrossRef Medline
Scholz JP, Schoner G (1999) The uncontrolled manifold concept: identify-ing control variables for a functional task. Exp Brain Res 126:289 –306.CrossRef Medline
Sengul G, Watson C (2014) Ascending and descending pathways in the spi-nal cord. In: The rat nervous system, Chap 8 (Paxinos G, ed), pp 115–130.Amsterdam: Elsevier.
Thompson AK, Wolpaw JR (2014) Operant conditioning of spinal reflexes:from basic science to clinical therapy. Front Integr Neurosci 8:25. CrossRefMedline
Thompson AK, Wolpaw JR (2015) Targeted neuroplasticity for rehabilita-tion. Prog Brain Res 218:157–172. CrossRef Medline
Thompson AK, Chen XY, Wolpaw JR (2009) Acquisition of a simple skill:task-dependent adaptation plus long-term change in the human soleusH-reflex. J Neurosci 29:5784 –5792. CrossRef Medline
Thompson AK, Pomerantz FR, Wolpaw JR (2013) Operant conditioning ofa spinal reflex can improve locomotion after spinal cord injury in hu-mans. J Neurosci 33:2365–2375. CrossRef Medline
Vahdat S, Lungu O, Cohen-Adad J, Marchand-Pauvert V, Benali H, Doyon J(2015) Simultaneous brain-cervical cord fMRI reveals intrinsic spinalcord plasticity during motor sequence learning. PLoS Biol 13: e1002186.CrossRef Medline
Wang Y, Pillai S, Wolpaw JR, Chen XY (2006) Motor learning changesGABAergic terminals on spinal motoneurons in normal rats. Eur J Neu-rosci 23:141–150. CrossRef Medline
Wang Y, Pillai S, Wolpaw JR, Chen XY (2009) H-reflex down-conditioninggreatly increases the number of identifiable GABAergic interneurons inrat ventral horn. Neurosci Lett 452:124 –129. CrossRef Medline
Wolpaw JR (1987) Operant conditioning of primate spinal reflexes: theH-reflex. J Neurophysiol 57:443– 459. Medline
Wolpaw JR (2010) What can the spinal cord teach us about learning andmemory? Neuroscientist 16:532–549. CrossRef Medline
Wolpaw JR (2012) Harnessing neuroplasticity for clinical applications.Brain 135:e215. CrossRef Medline
Wolpaw JR, Lee CL (1989) Memory traces in primate spinal cord producedby operant conditioning of H-reflex. J Neurophysiol 61:563–572. Medline
Wolpaw JR, Tennissen AM (2001) Activity-dependent spinal cord plasticityin health and disease. Annu Rev Neurosci 24:807– 843. Medline
Wolpaw JR, Lee CL, Calaitges JG (1989) Operant conditioning of primatetriceps surae H-reflex produces reflex asymmetry. Exp Brain Res 75:35–39. Medline
Wolpaw JR, Herchenroder PA, Carp JS (1993) Operant conditioning of theprimate H-reflex: factors affecting the magnitude of change. Exp BrainRes 97:31–39. CrossRef Medline
8206 • J. Neurosci., August 23, 2017 • 37(34):8198 – 8206 Chen et al. • Why Spinal Plasticity Does Not Disrupt Behaviors