Embed Size (px)
Citation preview
Rozdział 1
Statyka
1.1 Twierdzenie o trzech siłach
Twierdzenie dotyczy równowagi płaskiego zbieznego układu sił.
Twierdzenie 1 (Twierdzenie o trzech siłach) Aby trzy nierówno-
ległe do siebie siły działajace na ciało sztywne były w równowadze, linie
działania tych sił musza przecinac sie w jednym punkcie, a same siły
musza tworzyc trójkat zamkniety.
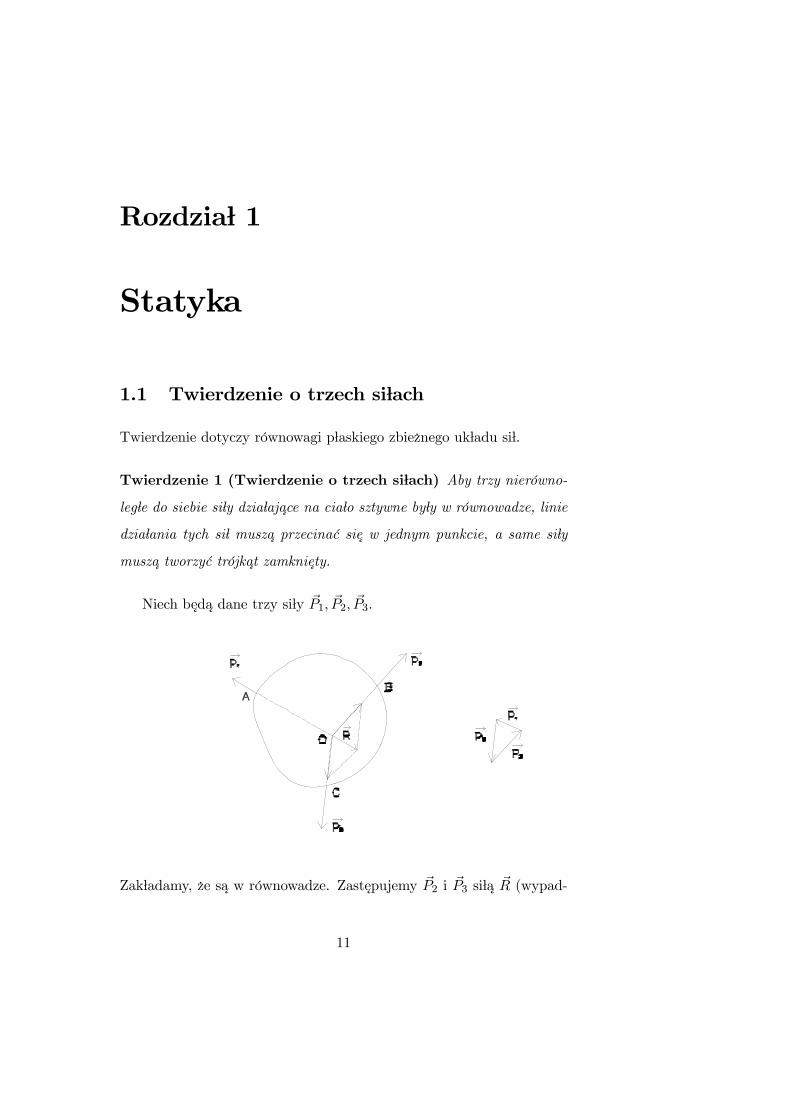
Niech beda dane trzy siły P1, P2, P3.
Zakładamy, ze sa w równowadze. Zastepujemy P2 i P3 siła R (wypad-
11

kowa tych dwóch).
R = P2 + P3.
Pozostaja wiec dwie siły: P1 i R. Poniewaz układ jest w równowadze,
wiec
P1 = −R, P1 = R.
Stad P1, P2, P3 sa zbiezne i tworza wielobok zamkniety. W kazdym
przypadku jest to trójkat.
1.2 Równania równowagi płaskiego zbieznego
układu sił
Wprowadzmy układ współrzednych.
Poniewaz siła jest wektorem, mozemy ja zapisac nastepujaco
P = Px + Py = Pxi+ Pyj,
Px = P cosα, Py = P sinα,
P =qP 2x + P 2y .
Jezeli mamy układ n sił zbieznych, to wypadkowa
R =X
Pi.
12

Stosujac twierdzenie, rzut sumy geometrycznej wektorów na dowolna os
równa sie sumie rzutów tych wektorów na ta sama os, otrzymujemy⎧⎨⎩ Rx = P1x + P2x + . . .+ Pnx =P
Pix
Ry = P1y + P2y + . . .+ Pny =P
Piy,
R =qR2x +R2y =
r³XPix
´2+³X
Piy
´2.
Warunkiem równowagi jest, aby
R = 0.
Stad otrzymujemy równania równowagi:⎧⎨⎩ Rx = P1x + P2x + . . .+ Pnx =P
Pix = 0
Ry = P1y + P2y + . . .+ Pny =P
Piy = 0.
1.3 Moment siły
MO = r × F
r = r1 +−−→AB
MO = r1 × F +−−→AB × F = r1 × F.
13

MO = rF sin³r, F
´MO = hF
Aby siły zbiezne lezace w jednej płaszczyznie były w równowadze,
sumy rzutów tych sił na osie układu musza byc równe zeru.
Równania równowagi mozna przedstawic równiez w innej postaci.
W tym celu udowodnimy twierdzenie Varignona.
Twierdzenie 2 (Varignon) Moment wzgledem dowolnego punktu O
wypadkowej dwóch sił równy jest sumie momentów sił wypadkowych
wzgledem tegoz punktu.
Zgodnie z definicja momentu wektora wzgledem punktu mozemy napisac
MO = r ×R,
gdzie R = F1 + F2.
MO1 = r × F1,
MO2 = r × F2.
14
Otrzymujemy
MO = r ×R = r ׳F1 + F2
´= r × F1 + r × F2
= MO1 +MO
2 .
Twierdzenie to mozna uogólnic na dowolna ilosc sił zbieznych
MO =X
M0i .
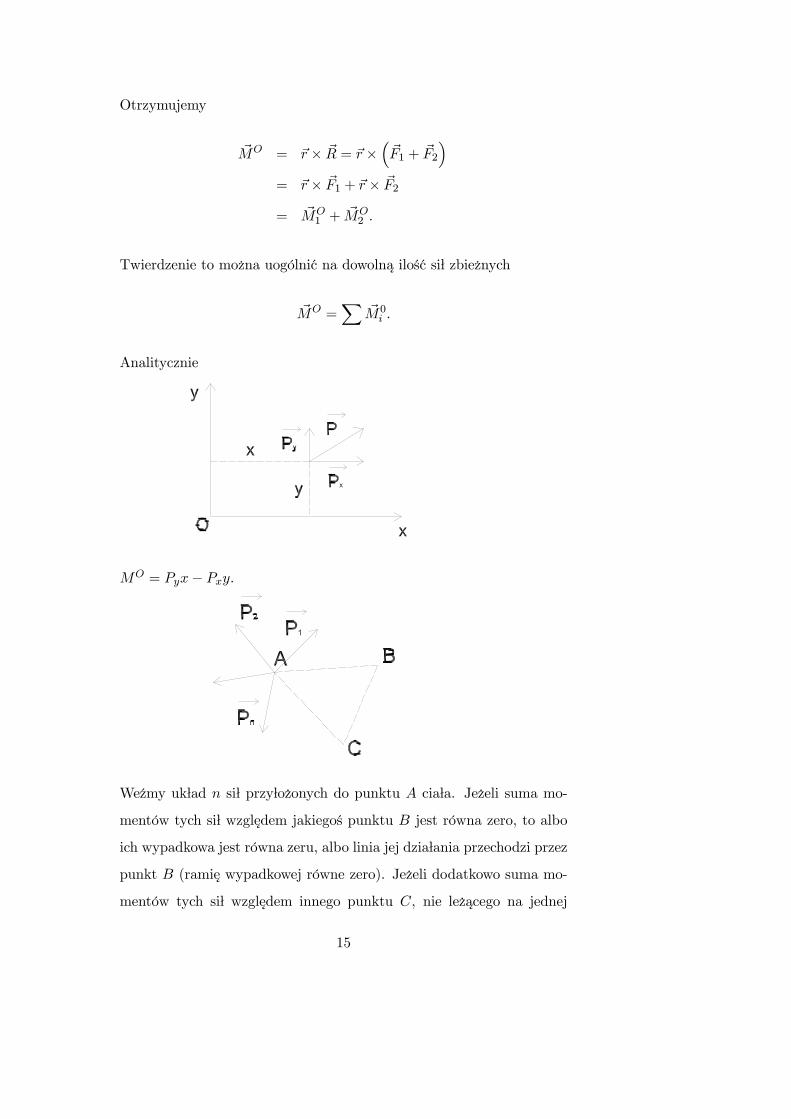
Analitycznie
MO = Pyx− Pxy.
Wezmy układ n sił przyłozonych do punktu A ciała. Jezeli suma mo-
mentów tych sił wzgledem jakiegos punktu B jest równa zero, to albo
ich wypadkowa jest równa zeru, albo linia jej działania przechodzi przez
punkt B (ramie wypadkowej równe zero). Jezeli dodatkowo suma mo-
mentów tych sił wzgledem innego punktu C, nie lezacego na jednej
15
prostej z punktami A i B jest takze równa zeru, wówczas wypadkowa
R musi byc równa zero.
Aby płaski układ sił zbieznych znajdował sie w równowadze
musza równac sie zeru rzuty momentów wszystkich sił tego
układu wzgledem dowolnych dwóch punktów nie lezacych z
punktem przyłozenia sił na jednej prostej. Stad druga postac
równan równowagi
XMiB = 0,
XMiC = 0.
Gdy w zadaniach mamy trzy niewiadome, to do pierwszej postaci rów-
nan dodajemy jedno równanie momentów.
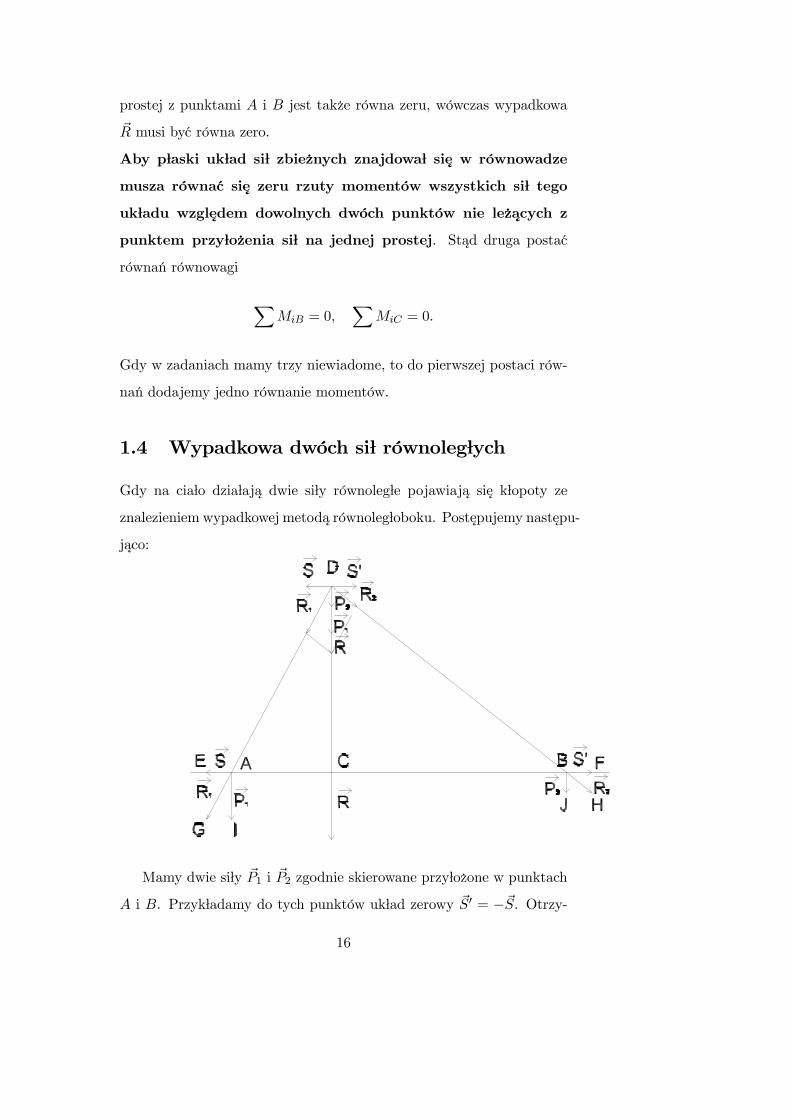
1.4 Wypadkowa dwóch sił równoległych
Gdy na ciało działaja dwie siły równoległe pojawiaja sie kłopoty ze
znalezieniem wypadkowej metoda równoległoboku. Postepujemy nastepu-
jaco:
Mamy dwie siły P1 i P2 zgodnie skierowane przyłozone w punktach
A i B. Przykładamy do tych punktów układ zerowy S0 = −S. Otrzy-
16

mujemy wypadkowe
R1 = P1 + S i R2 = P2 + S.
Siły R1 i R2 mozemy juz złozyc. Przesuwamy je do punktuD i składamy
R = R1 +R2,
R = P1 + S + P2 + S0 = P1 + P2,
R = P1 + P2.
Linia działania wypadkowej przechodzi przez punkt C.
Połozenie tego punktu okreslaja odcinki (Twierdzenie Talesa)
AC = ABP2
P1 + P2, BC = AB
P1P1 + P2
.
Jezeli siły równoległe sa przeciwnie skierowane, to
R = R1 +R2,
R = P1 − P2,
AC = ABP2
P1 − P2, BC = AB
P1P1 − P2
.
1.5 Para sił
Układ dwóch sił równoległych P 0 = −P, P 0 = P nie lezacych na jednej
prostej nazywamy para sił. Odległosc miedzy siłami nazywamy ramie-
niem pary sił.
17
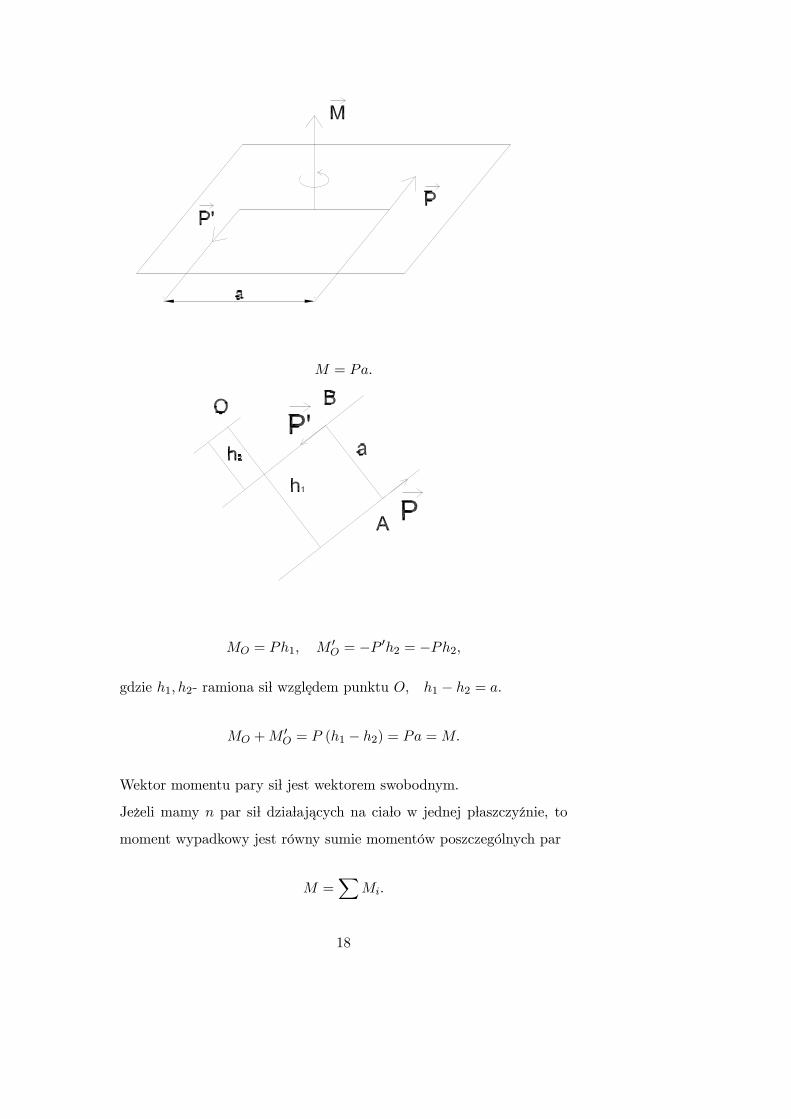
M = Pa.
MO = Ph1, M 0O = −P 0h2 = −Ph2,
gdzie h1, h2- ramiona sił wzgledem punktu O, h1 − h2 = a.
MO +M 0O = P (h1 − h2) = Pa =M.
Wektor momentu pary sił jest wektorem swobodnym.
Jezeli mamy n par sił działajacych na ciało w jednej płaszczyznie, to
moment wypadkowy jest równy sumie momentów poszczególnych par
M =X
Mi.
18

Aby pary sił działajace w jednej płaszczyznie na ciało sztywne
znajdowały sie w równowadze, suma momentów tych par musi
sie równac zeru. XMi = 0.
Warunek równowagi par sił w jednej płaszczyznie.
Pary sił o tej samej płaszczyznie działania i równych momen-
tach sa sobie statycznie równowazne.
Składanie par sił w jednej płaszczyznie.
Aby pary sił działajace w jednej płaszczyznie na ciało sztywne
znajdowały sie w równowadze, suma momentów tych par musi
sie równac zeru.
XMi = M1 +M2 + . . .+Mn = Qb,XMi = 0 - warunek równowagi.
1.6 Redukcja dowolnego płaskiego układu
Rozpatrzmy przypadek:
Dana siła P . Do dowolnego punktu O ciała przykładamy układ zerowy.
P i P 0 = −P .
Otrzymujemy układ:
siła P ,
para sił o momencie MO = aP .
Jezeli mamy układ n sił, to mozna go spróbowac do siły i pary sił, gdzie
R =X
Pi - wektor główny,
MO =X
MiO -moment główny wzgledem srodka redukcji O.
19

Redukcja w układzie współrzednych
Rx =X
Pix, Ry =X
Piy.
Moment kazdej siły wzgledem srodka redukcji, którym jest poczatek
układu, wynosi
MiO = Piyxi − Pixyi.
Moment główny
MO =X
MiO =X
(Piyxi − Pixyi)
1.6.1 Redukcja układu do wypadkowej
Jezeli moment główny układu da sie przedstawic w postaci
MO = hR, R- wektor główny,
to układ redukuje sie do wypadkowej.
W przypadku, gdy suma geometryczna układu sił P1, P2, . . . , Pn
działajacych w jednej płaszczyznie na ciało sztywne jest rózna
od zera, układ zastapic mozemy jedna siła wypadkowa równa
wektorowi głównemu
R =X
Pi.
20

Moment tej siły wypadkowej
MO
³R´
=X
MiO,
MO
³R´
= Ryx−Rxy- równanie prostej, na której lezy wypadkowa.
1.7 Warunki równowagi dowolnego płaskiego układu
sił
Aby układ znajdował sie w równowadze wektor i moment główny musi
byc równy 0.
R = 0, MO = 0.
Równania równowagi dowolnego płaskiego układu
XPix = 0,
XPiy = 0,
XMiO = 0,X
Pix = 0,X
MiA = 0,X
MiB = 0,XMiA = 0,
XMiB = 0,
XMiC = 0.
1.8 Siły zbiezne w przestrzeni
Wypadkowa zbieznego przestrzennego układu sił
R =X
Pi.
Dowolny układ sił przyłozonych do jednego punktu zastapic
mozemy jedna siła wypadkowa przyłozona w tym punkcie i
równa sumie geometrycznej sił.
21

R = P1 + P2 + P3.
Px = P cosα, Py = P cosβ, Pz = P cos γ,
P =pOA02 +AA02, AA0 = Pz, OA02 = P 2x + P 2y ,
P =qP 2x + P 2y + P 2z .
Stad wypadkowa układu
R = Rxi+Ryj +Rzk,
Rx =X
Pix, Ry =X
Piy, Rz =X
Piz,
R =qR2x +R2y +R2z.
22
Równania równowagi
XPix = 0,
XPiy = 0,
XPiz = 0,
z warunku
R =X
Pi = 0.
1.9 Przestrzenny układ sił równoległych
Dany jest układ n sił w przestrzeni
Wektor główny tego układu jest
R =X
Pi = Rxi+Ryj +Rzk.
Moment główny wzgledem poczatku układu
MO =X
Mi =MxOi+MyOj +MzOk,
gdzie
Rx =X
Pix, Ry =X
Piy, Rz =X
Piz,
MxO =X
(Piyzi − Pizyi) = Ryz −Rzy,
MyO =X
(Pizxi − Pixzi) = Rzx−Rxz, (1.1)
MzO =X
(Pixyi − Piyxi) = Rxy −Ryx.
23

Katy nachylenia sił do osi układu sa α, β, γ.
Pix = Pi cosα, Rx = R cosα,
Piy = Pi cosβ, Ry = R cosβ, (1.2)
Piz = Pi cos γ, Rz = R cos γ.
Podstawiamy 2.2 do 2.1
X(Pi cosβ · zi − Pi cos γ · yi) = R cosβ · z −R cos γ · y,X(Pi cos γ · xi − Pi cosα · zi) = R cos γ · x−R cosα · z,X(Pi cosα · yi − Pi cosβ · xi) = R cosα · y −R cosβ · x.
Po uporzadkowaniu wg kosinusów kierunkowych otrzymujemy
³Rz −
XPizi
´cosβ =
³Ry −
XPiyi
´cos γ,³
Rx−X
Pixi
´cos γ =
³Rz −
XPizi
´cosα,³
Ry −X
Piyi
´cosα =
³Rx−
XPixi
´cosβ.
Stad otrzymujemy
Rx−P
Pixicosα
=Ry −
PPiyi
cosβ=
Rz −P
Pizicos γ
.
Dzielac stronami przez R mamy
Rx−P
PixiR
cosα=
Ry−P
PiyiR
cosβ=
Rz−P
PiziR
cos γ.
Oznaczajac
x0 =
PPixiR
, y0 =
PPiyiR
, z0 =
PPiziR
, (1.3)
24

otrzymujemy równanie wypadkowej
x− x0cosα
=y − y0cosβ
=z − z0cos γ
.
Punkt S (x0, y0, z0) nazywamy srodkiem sił równoległych.
Zwiazki 2.3 mozna zapisac nastepujaco:
r0 =
PPiriPPi
, x0 =
PPixxiPPix
, y0 =
PPiyyiPPiy
, z0 =
PPizziPPiz
.
1.10 Srodki ciezkosci
Mamy bryłe. Mozna ja podzielic na n elementów.
Srodkiem ciezkosci nazywamy punkt, wzgledem którego suma mo-
mentów wszystkich sił ∆Gi równa sie zero (srodek równoległych sił
ciezkosci).P∆Gi = G- wypadkowa
xoX∆Viγi =
X∆Gixi,
xoX∆Viγi =
X∆Viγixi,
xo =
Pγixi∆ViPγi∆Vi
.
25

Obracajac układ otrzymujemy
yo =
Pγiyi∆ViPγi∆Vi
,
zo =
Pγizi∆ViPγi∆Vi
.
Przechodzac do granicy przy n→∞ mamy
xo =
RV
γxdVRV
γdV,
yo =
RV
γydVRV
γdV,
zo =
RV
γzdVRV
γdV.
Jezeli ρ = const. (ciało jednorodne), to
xo =
RV
xdV
V,
yo =
RV
ydV
V,
zo =
RV
zdV
V.
Jezeli uwzglednimy, ze γ = ρg, ρ = const., to otrzymamy wzory na
współrzedne srodka masy:
xo =
Pρixi∆ViPρi∆Vi
=
Pxi∆miP∆mi
=
Pxi∆mi
M,
yo =
Pρiyi∆ViPρi∆Vi
=
Pyi∆miP∆mi
=
Pyi∆mi
M,
zo =
Pρizi∆ViPρi∆Vi
=
Pzi∆miP∆mi
=
Pzi∆mi
M.
26
Przechodzac do granicy przy n→∞ otrzymujemy
xo =
RρxdVRρdV
=
Rxdm
M,
yo =
RρydVRρdV
=
Rydm
M,
zo =
RρzdVRρdV
=
Rzdm
M,
gdzie
ZxdmZydm - momenty statyczne.Zzdm
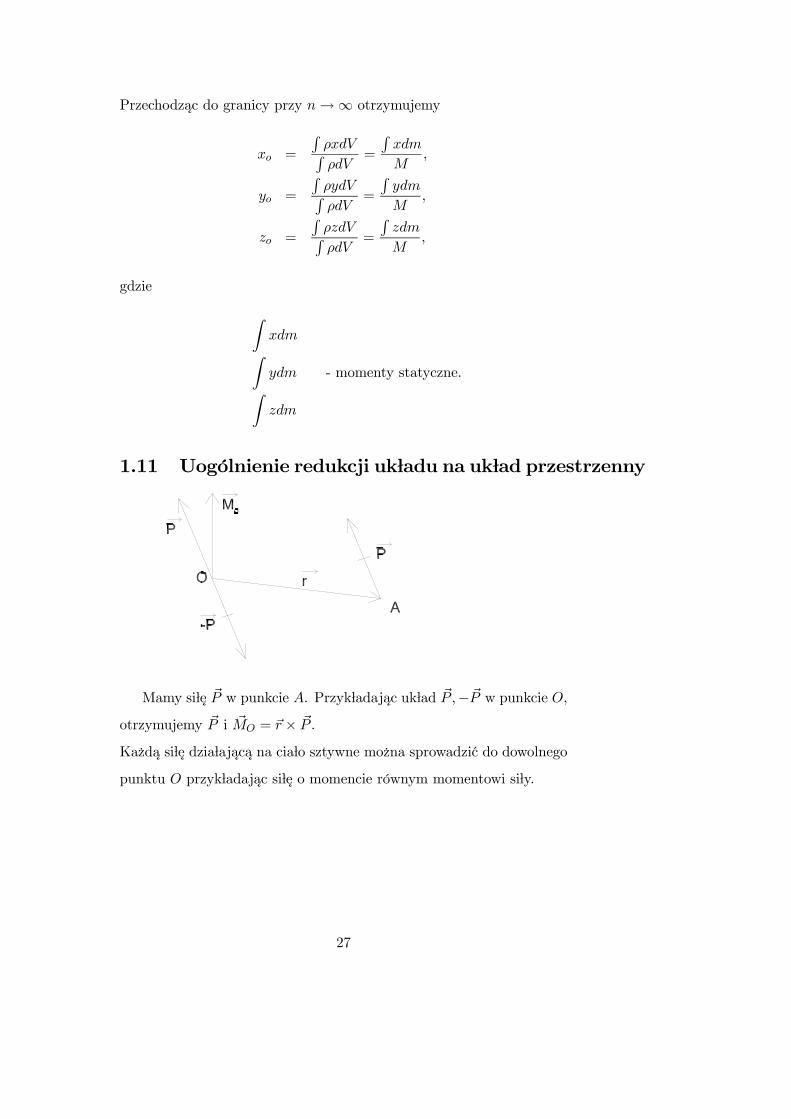
1.11 Uogólnienie redukcji układu na układ przestrzenny
Mamy siłe P w punkcie A. Przykładajac układ P,−P w punkcie O,
otrzymujemy P i MO = r × P .
Kazda siłe działajaca na ciało sztywne mozna sprowadzic do dowolnego
punktu O przykładajac siłe o momencie równym momentowi siły.
27

Podobnie mozna postapic ze wszystkimi siłami układu przestrzennego:
R = P1 + P2 + . . .+ Pn =X
Pi,
MO = MO1 +MO2 + . . .+MOn =X
MOi
= r1 × P1 + r2 × P2 + . . .+ rn × Pn,
gdzie r1 =−→OA1, r2 =
−→OA2, . . . , rn =
−→OAn,
R - wektor główny,
MO - moment główny.
Analitycznie:
Momenty wzgledem osi:
MOx =X
Mix =X
(Pizyi − Piyzi) ,
MOy =X
Mix =X
(Pixzi − Pizxi) ,
MOz =X
Mix =X
(Piyxi − Pixyi) ,
gdzie xi, yi, zi - współrzedne punktów przyłozenia sił Pi.
MO =qM2
Ox +M2Oy +M2
Oz.
1.12 Ogólne warunki i równania równowagi dowol-
nego przestrzennego układu sił
Aby dowolny układ był w równowadze, musi byc
R = 0, MO = 0.
28

Ogólne równania równowagi
⎧⎪⎪⎪⎨⎪⎪⎪⎩P
Pix = 0,P
Mix = 0,PPiy = 0,
PMiy = 0,P
Piz = 0,P
Miz = 0.
1.13 Zmiana bieguna redukcji
Załózmy, ze układ sił P1, . . . , Pn zredukowalismy wzgledem punktu
O.
MO =X
MiO =X
ri × Pi =X−→
OAi × Pi.
Obierzmy teraz punkt O1 jako punkt redukcji
MO1 =X
MiO1 =X−−−→
O1Ai × Pi,
−−−→O1Ai =
−−→O1O +
−−→OAi.
Wtedy
MO1 =X−−−→
O1Ai × Pi =X³−−→
O1O +−−→OAi
´× Pi
=−−→O1O ×
XPi +
X−−→OAi × Pi,X
Pi = R,X−−→
OAi × Pi =MO.
29

Zatem
MO1 =MO +−−→O1O ×R.
1.14 Niezmienniki redukcji układu sił
1. Wektor główny nie zalezy od srodka redukcji.
2. Rzut momentu głównego na kierunek wektora głównego
MO1 ◦R =MO ◦R+³−−→O1O ×R
´◦R,
czyli
MO1 ◦R = MO ◦R = const.
MO ◦R = MOR cosα.
Poniewaz R = const. wzgledem srodka redukcji, to
MO cosα = const.
1.15 Przypadki redukcji układu
Gdy moment główny jest prostopadły do wektora głównego, układ sił
mozemy zredukowac do jednej siły wypadkowej
R =X
Pi.
Wówczas moment wypadkowej równa sie momentowi głównemu.
1. R 6= 0, MO 6= 0 - siła, para sił.
2. R 6= 0, MO = 0 - wypadkowa.
30
3. R = 0, MO 6= 0 - para sił.
4. R = 0, MO = 0 - równowaga.
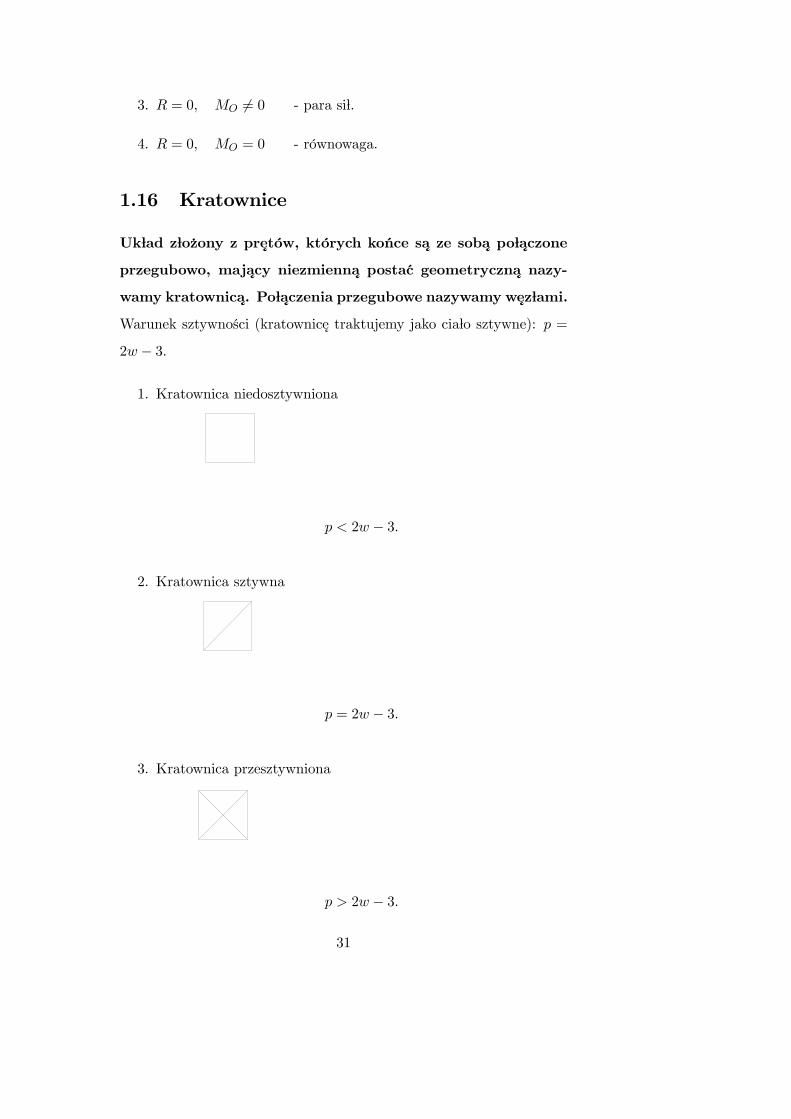
1.16 Kratownice
Układ złozony z pretów, których konce sa ze soba połaczone
przegubowo, majacy niezmienna postac geometryczna nazy-
wamy kratownica. Połaczenia przegubowe nazywamy wezłami.
Warunek sztywnosci (kratownice traktujemy jako ciało sztywne): p =
2w − 3.
1. Kratownica niedosztywniona
p < 2w − 3.
2. Kratownica sztywna
p = 2w − 3.
3. Kratownica przesztywniona
p > 2w − 3.
31
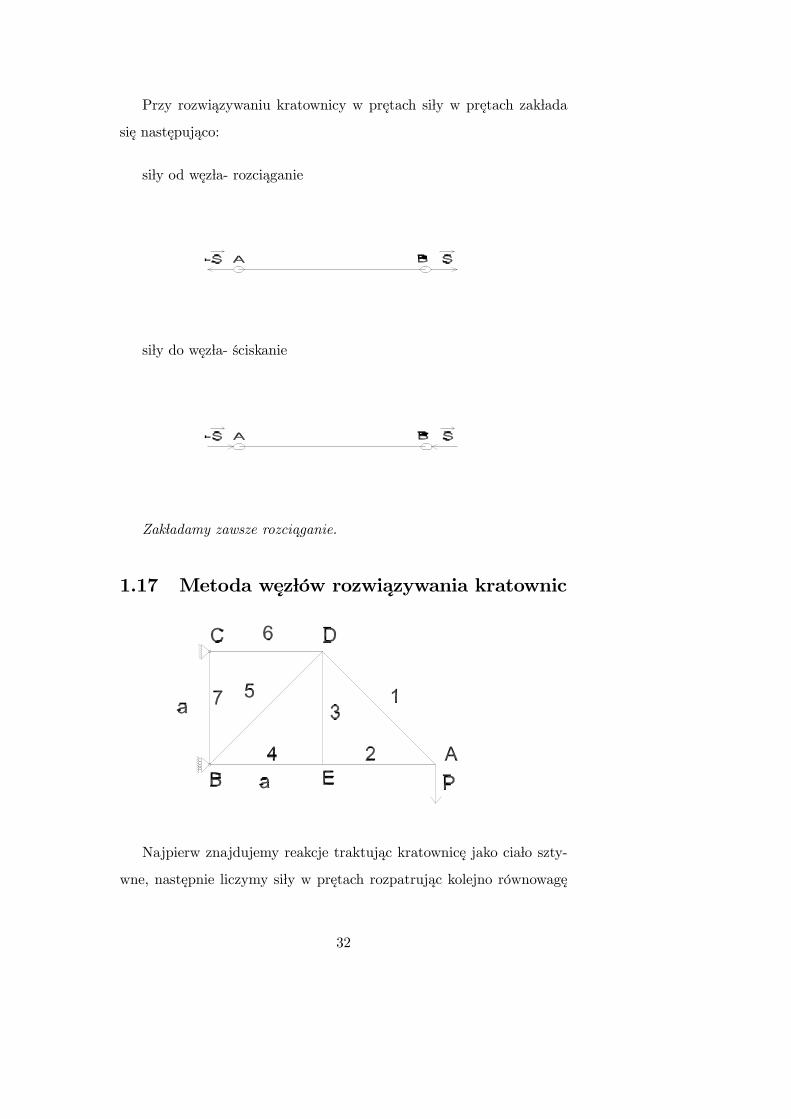
Przy rozwiazywaniu kratownicy w pretach siły w pretach zakłada
sie nastepujaco:
siły od wezła- rozciaganie
siły do wezła- sciskanie
Zakładamy zawsze rozciaganie.
1.17 Metoda wezłów rozwiazywania kratownic
Najpierw znajdujemy reakcje traktujac kratownice jako ciało szty-
wne, nastepnie liczymy siły w pretach rozpatrujac kolejno równowage
32

wszystkich wezłów. Wycinamy (uwalniamy od wiezów) wezeł np. A
zastepujac prety siłami
⎧⎨⎩P
Pix = −S2 − S1 cos 45o = 0P
Piy = −P + S1 sin 45o = 0
=⇒
⎧⎨⎩ S1 =√2P
S2 = −P.
Jezeli w jednym wezle schodza sie trzy prety, przy czym dwa z nich leza
na jednej prostej, to trzeci jest pretem zerowym.
1.18 Metoda Rittera
Metoda Rittera polega na rozpatrywaniu równowagi czesci kratownicy
powstałej na skutek jej przekroju przez trzy prety.
Odcieta czesc traktujemy jako ciało sztywne i układamy dla niej rów-
nania momentów wzgledem punktów, w których parami przecinaja sie
kierunki sił niwiadomych.
33
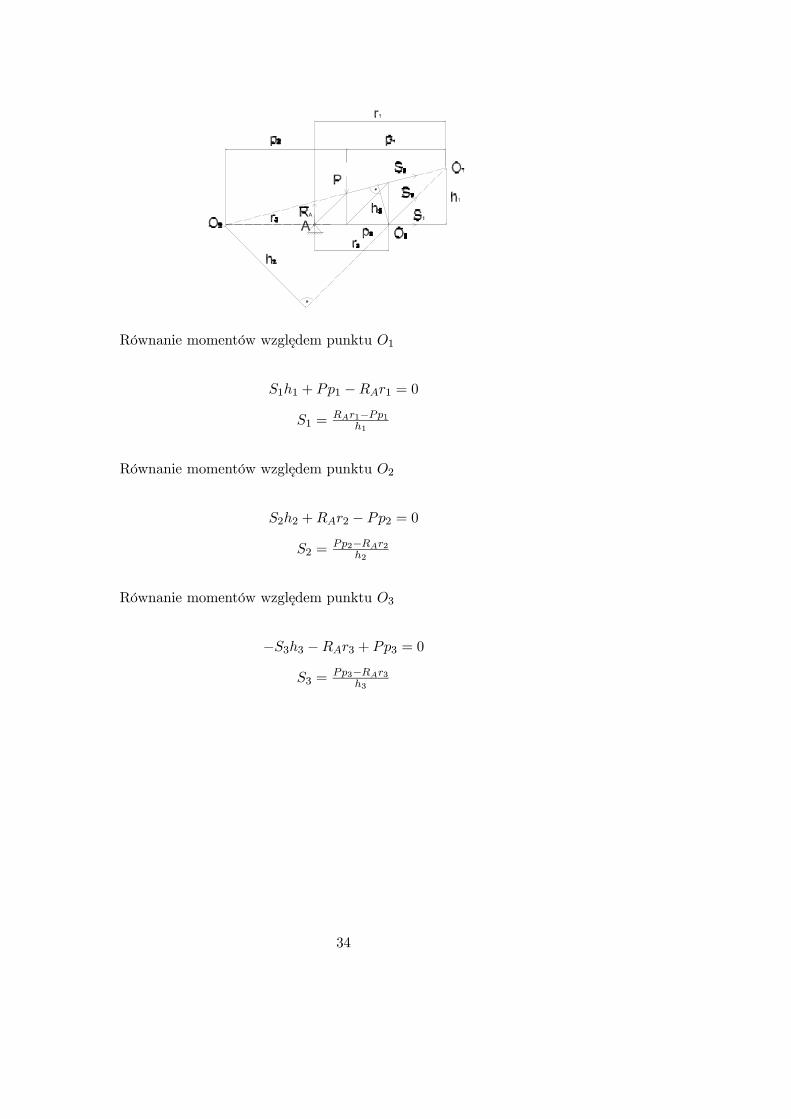
Równanie momentów wzgledem punktu O1
S1h1 + Pp1 −RAr1 = 0
S1 =RAr1−Pp1
h1
Równanie momentów wzgledem punktu O2
S2h2 +RAr2 − Pp2 = 0
S2 =Pp2−RAr2
h2
Równanie momentów wzgledem punktu O3
−S3h3 −RAr3 + Pp3 = 0
S3 =Pp3−RAr3
h3
34





























