-
7/17/2019 Taller...
1/10
Taller Control de procesosAnlisis de ganancia y diseo de
controladores
Facultad de Ingenieras y ArquitecturaUniversidad de Pamplona
Nombre Cesar !nrique "o#as $ilvaC%digo &'()*+(&,(Nombre
-evin .avid /eal 0odoyC%digo &'(12')2)1
N3TA4444444
Taller
1) G ( s )=
K
(s+5)3
s
(3+15s2+75s+125+k)
G (s )=K
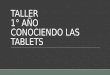
K=10, 100, 400, 580, 1000
num1=[10];
den1=[1 15 75 135];
gf1=tf(num1, den1);
num2=[100];
den2=[1 15 75 225];
gf2=tf(num2, den2);
num3=[400];
den3=[1 15 75 525];
gf3=tf(num3, den3);
num4=[580];
den4=[1 15 75 705];
gf4=tf(num3, den3);
num5=[1000];
den5=[1 15 75 1125];gf5=tf(num5, den5);
step(gf1, 'b', gf2,'r', gf3,'k', gf4,'m',gf5,'g',5)
legend('k1','k2','k3','k4','k5')
-
7/17/2019 Taller...
2/10
Taller Control de procesosAnlisis de ganancia y diseo de
controladores
Facultad de Ingenieras y ArquitecturaUniversidad de Pamplona
Nombre Cesar !nrique "o#as $ilvaC%digo &'()*+(&,(Nombre
-evin .avid /eal 0odoyC%digo &'(12')2)1
N3TA4444444
CONCLUSION:
De acuerdo a la grfica se concluye que k3, k4 y k5 son
inestables ya que no estn
controladas en co!araci"n con k1 y k# las cuales son estables a
!artir de 1 y 1,5
res!ecti$aente%
&on base a esto se !uede deducir que la 'nica anera de
estabili(ar la grfica es un ensayo
de !rueba y error !ara los $alores de la ganancia% )l $alor s
adecuado es el enor !ara laganancia en este caso 10%
2) G (S )= 0.1
s+1
Tipo controlador Kp Ti Td
P T*+ 0
PI 0,- T*+ +*0,3 0
-
7/17/2019 Taller...
3/10
Taller Control de procesosAnlisis de ganancia y diseo de
controladores
Facultad de Ingenieras y ArquitecturaUniversidad de Pamplona
Nombre Cesar !nrique "o#as $ilvaC%digo &'()*+(&,(Nombre
-evin .avid /eal 0odoyC%digo &'(12')2)1
N3TA4444444
PID 1,# T*+ #+ 0,5 +
-
7/17/2019 Taller...
4/10
Taller Control de procesosAnlisis de ganancia y diseo de
controladores
Facultad de Ingenieras y ArquitecturaUniversidad de Pamplona
Nombre Cesar !nrique "o#as $ilvaC%digo &'()*+(&,(Nombre
-evin .avid /eal 0odoyC%digo &'(12')2)1
N3TA4444444
.eg'n la grfica/
T= #,5 +=0,#5
Tipo controlador Kp Ti Td
P 11 0PI -,- 0,83 0
PID 13,# 0,5 0,1#5
Ki= K!*Ti
Kd= K!TdPara controlador PI: Ki= -,-*0,83= 11,-# Kd= -,-0 =
0
-
7/17/2019 Taller...
5/10
Taller Control de procesosAnlisis de ganancia y diseo de
controladores
Facultad de Ingenieras y ArquitecturaUniversidad de Pamplona
Nombre Cesar !nrique "o#as $ilvaC%digo &'()*+(&,(Nombre
-evin .avid /eal 0odoyC%digo &'(12')2)1
N3TA4444444
CONCLUSION
)l 2todo 1 de iegleric6ols es uy !rctico !ara dise7ar un control
9 !araa!ro:iarse a los $alores Ki y K! que se necesitan !ara
obtener las condiciones deseadas
ya que &uando se conocen las constantes Ki y K! se !uede
llegar s r!ido al a;uste
deseado%
3)G (S )=
6
s2+16
Tipo de
controlador
Kp Ti Td
P 0,5 Kcr 0
PI 0,45 Kcr cr*1,# 0
PID 0,< Kcr 0,5 cr 0,1#5 cr
-
7/17/2019 Taller...
6/10
Taller Control de procesosAnlisis de ganancia y diseo de
controladores
Facultad de Ingenieras y ArquitecturaUniversidad de Pamplona
Nombre Cesar !nrique "o#as $ilvaC%digo &'()*+(&,(Nombre
-evin .avid /eal 0odoyC%digo &'(12')2)1
N3TA4444444
bteniendo datos de la grfica/ cr= 1,3 Kcr= #,5
Tipo de
controlador
Kp Ti Td
P 1,#5 0PI 1,1#5 1,083 0
PID 1,5 0,
-
7/17/2019 Taller...
7/10
Taller Control de procesosAnlisis de ganancia y diseo de
controladores
Facultad de Ingenieras y ArquitecturaUniversidad de Pamplona
Nombre Cesar !nrique "o#as $ilvaC%digo &'()*+(&,(Nombre
-evin .avid /eal 0odoyC%digo &'(12')2)1
N3TA4444444
CONCLUSION
ara el segundo 2todo de iegleric6ols lo s eficiente es
increentar los $alores de
k! 6asta un $alor cr>tico Kcr !ara que la grfica !resenta
oscilaciones sostenidas, con base
a esto el controlador que e;or se a;usta a esto es el 9D%
4) G (S )=0.2
3 s+1
Ks= !2 Tao= 3
Ti= #TaoKs = #30,#= 1!2
-
7/17/2019 Taller...
8/10
Taller Control de procesosAnlisis de ganancia y diseo de
controladores
Facultad de Ingenieras y ArquitecturaUniversidad de Pamplona
Nombre Cesar !nrique "o#as $ilvaC%digo &'()*+(&,(Nombre
-evin .avid /eal 0odoyC%digo &'(12')2)1
N3TA4444444
") G (S )=0.5
6 s
-
7/17/2019 Taller...
9/10
Taller Control de procesosAnlisis de ganancia y diseo de
controladores
Facultad de Ingenieras y ArquitecturaUniversidad de Pamplona
Nombre Cesar !nrique "o#as $ilvaC%digo &'()*+(&,(Nombre
-evin .avid /eal 0odoyC%digo &'(12')2)1
N3TA4444444
Tao= # Ks= !"
Ti= 4TaoKs= 4
-
7/17/2019 Taller...
10/10
Taller Control de procesosAnlisis de ganancia y diseo de
controladores
Facultad de Ingenieras y ArquitecturaUniversidad de Pamplona
Nombre Cesar !nrique "o#as $ilvaC%digo &'()*+(&,(Nombre
-evin .avid /eal 0odoyC%digo &'(12')2)1
N3TA4444444
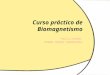
CONCLUSION
?l !rinci!io la funci"n no era la adecuada ya que daba una
oscilaci"n lo cual indica unaala funcionalidad !ero al corregirla
se !uede obser$ar que se estabili(a lo cual ser>a lo
"!tio%