Embed Size (px)
Citation preview
Target Tracking with Binary Proximity Sensors: Fundamental Limits, Minimal
Descriptions, and Algorithms
N. Shrivastava, R. Mudumbai, U. Madhow, and S. SuriUniv. of California Santa Barbara
SENSYS 2006
Presented by Jeffrey Hsiao
Outline
• Introduction• Geometry of Binary Sensing• Fundamental Limits• Tracking Algorithms• Simulation Results• Mote Experiments• Closing Remarks• Comments
Outline
• Introduction• Geometry of Binary Sensing• Fundamental Limits• Tracking Algorithms• Simulation Results• Mote Experiments• Closing Remarks• Comments
Introduction
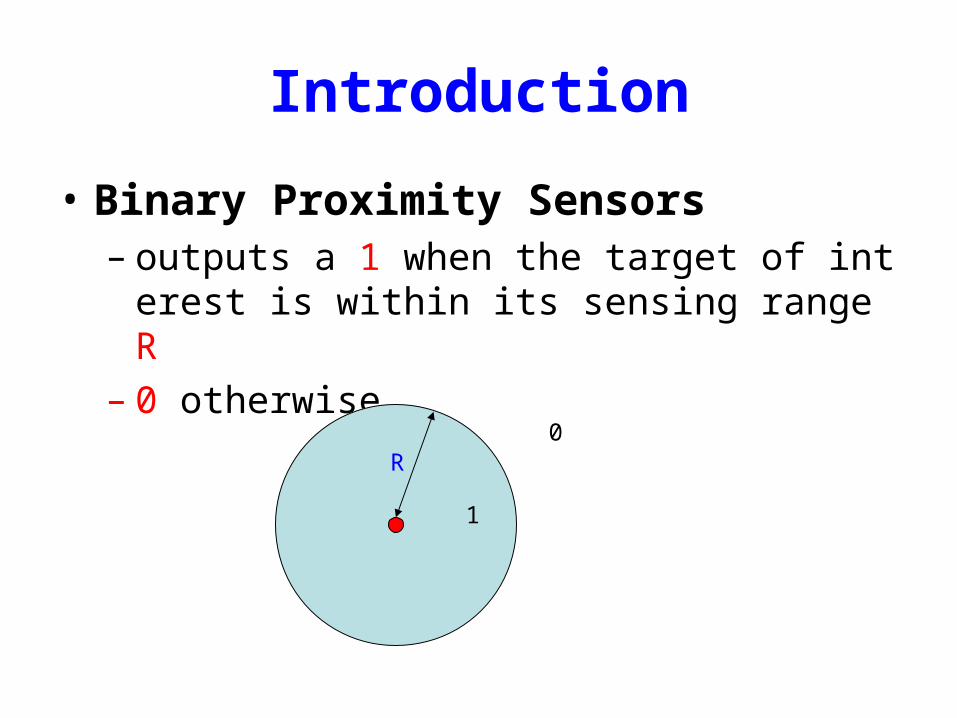
• Binary Proximity Sensors– outputs a 1 when the target of interest is withi
n its sensing range R– 0 otherwise
1
0R
Fundamental Limit Of Spatial Resolution
• Spatial Resolution– worst-case deviation between the estimated
and the actual paths
• Ideal achievable resolution is of the order of 1/R– R is the sensing range of individual sensors is the sensor density per unit area
Minimal Representations For The Target’s Trajectory
• Analogy between binary sensing and the sampling theory and quantization– “high-frequency” variations in the target’s
trajectory are invisible to the sensor field– estimate the shape or velocity for a “low-pass”
version of the trajectory.– consider piecewise linear approximations to
the trajectory that can be described economically
Occam’s Razor Approach
• Explanation of any phenomenon should make as few assumptions as possible
• Entities should not be multiplied beyond necessity
• All things being equal, the simplest solution tends to be the best one
Outline
• Introduction• Geometry of Binary Sensing• Fundamental Limits• Tracking Algorithms• Simulation Results• Mote Experiments• Closing Remarks• Comments
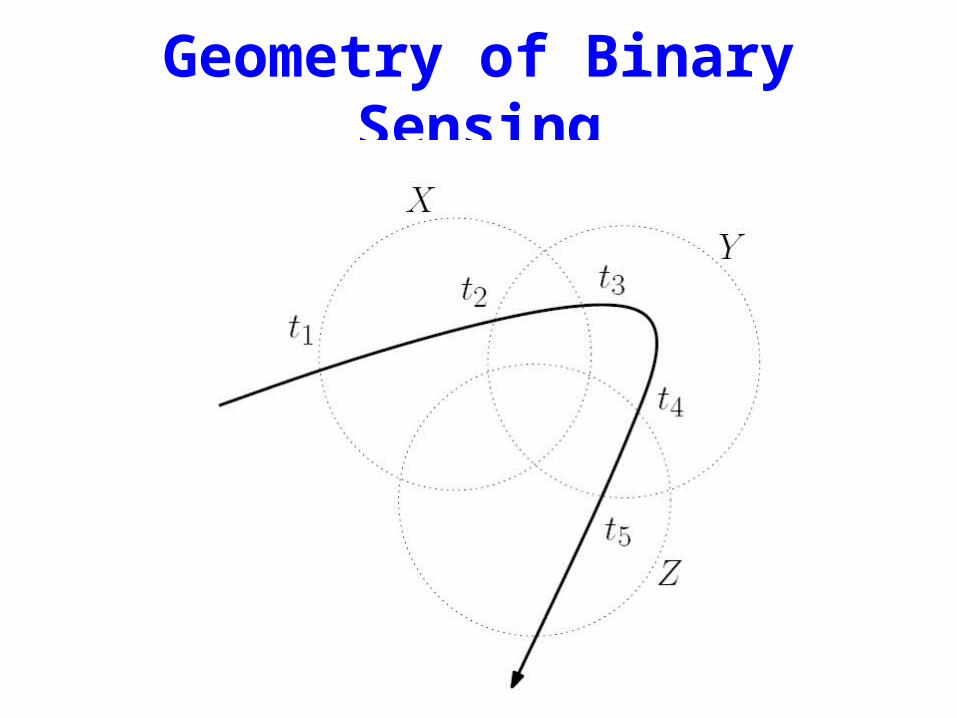
Geometry of Binary Sensing
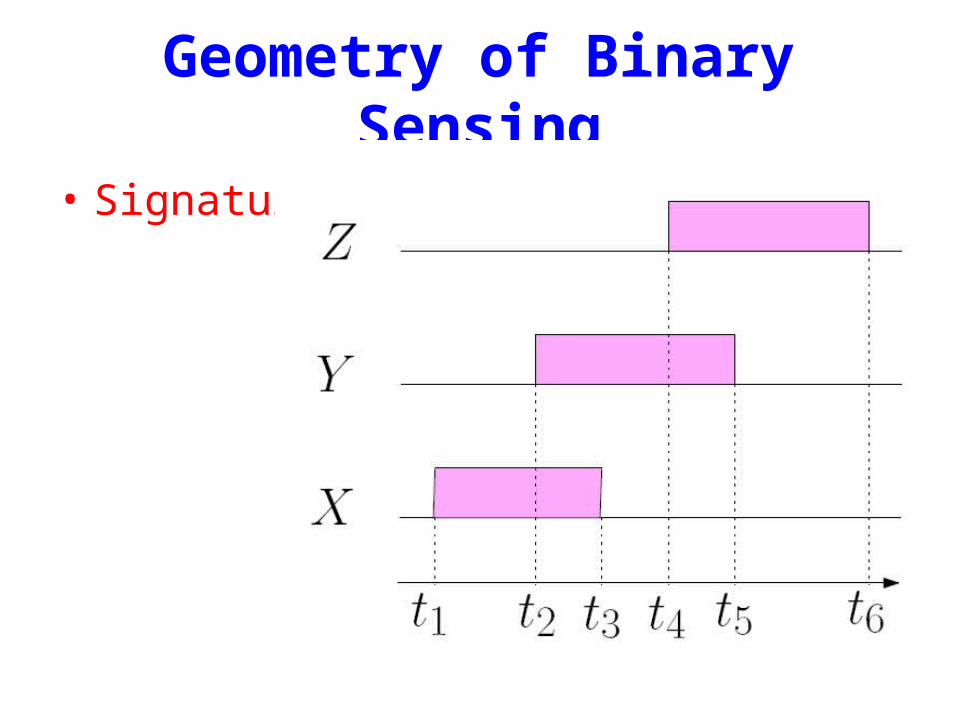
Geometry of Binary Sensing
• Signature
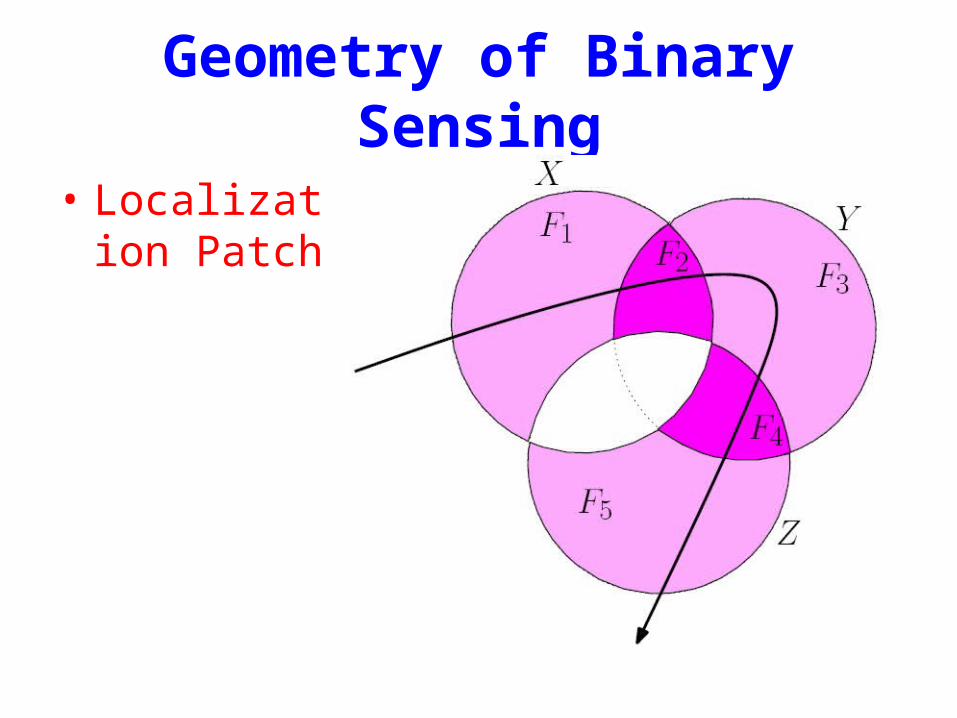
Geometry of Binary Sensing
• Localization Patch
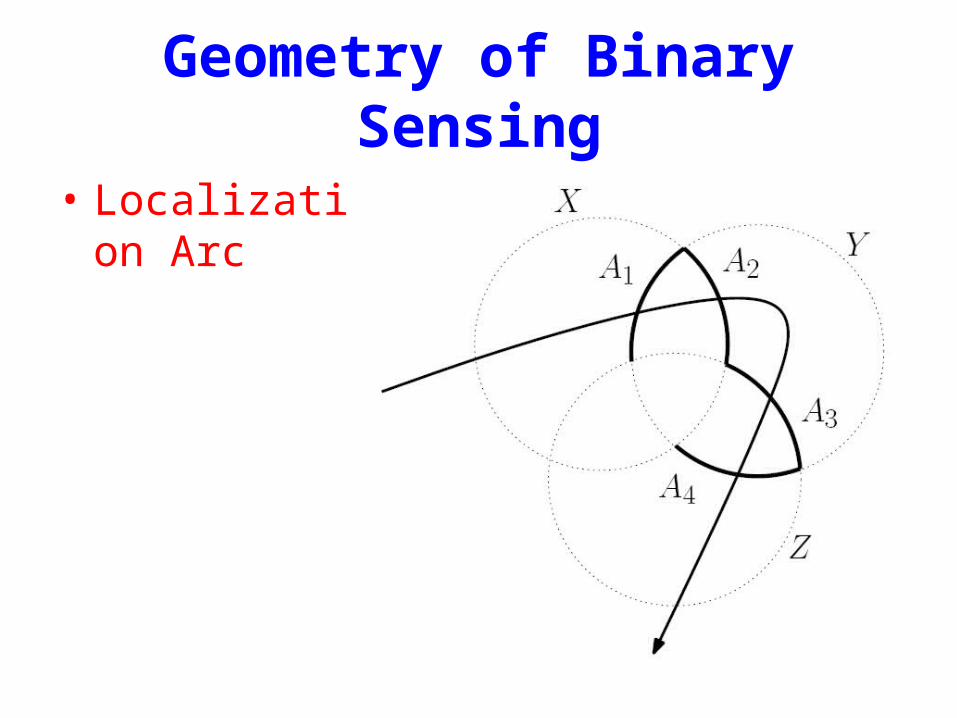
Geometry of Binary Sensing
• Localization Arc
Outline
• Introduction• Geometry of Binary Sensing• Fundamental Limits• Tracking Algorithms• Simulation Results• Mote Experiments• Closing Remarks• Comments
Fundamental Limits
• An Upper Bound on Spatial Resolution
• Achievability of Spatial Resolution Bound
• Remarks on Spatial Resolution Theorems
• Sampling and Velocity Estimation
An Upper Bound on Spatial Resolution
• THEOREM 1
• If a network of binary proximity sensors has average sensor density and each sensor has sensing radius R
• Then the worst-case error in localizing the target is at least W(1/ R)
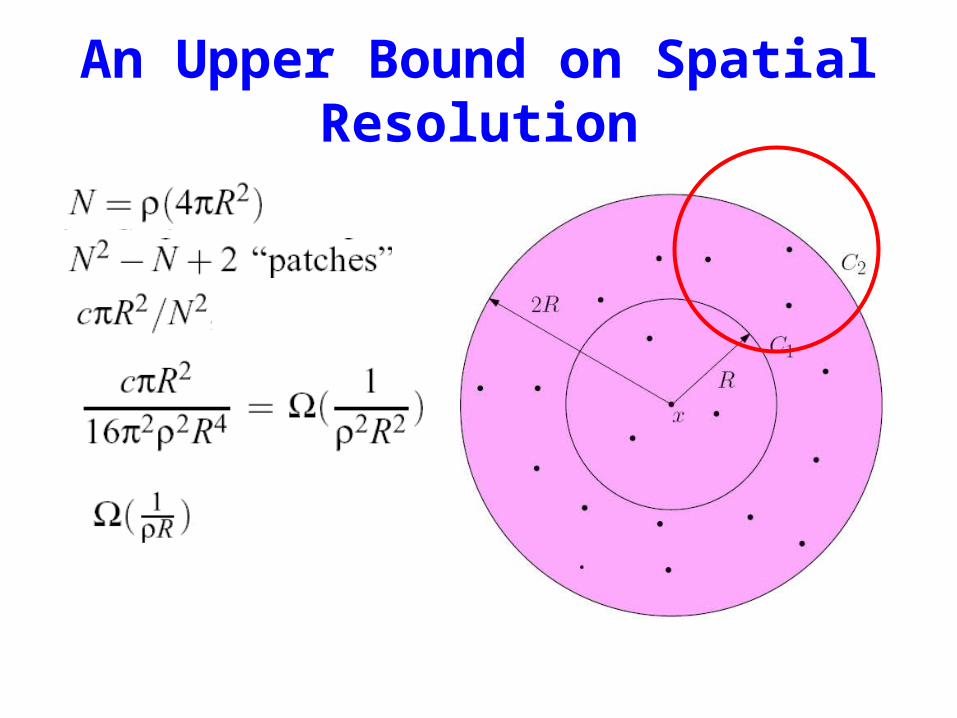
An Upper Bound on Spatial Resolution
Achievability of Spatial Resolution Bound
• THEOREM 2– Consider a network of binary proximity sensor
s, distributed according to the Poisson distribution of density , where each sensor has sensing radius R.
– Then the localization error at any point in the plane is of order 1/R .
Remarks on Spatial Resolution Theorems
• The more sensors we have, the better the spatial accuracy one should be able to achieve
• Having a large sensing radius may seem like a disadvantage
• A quadratic increase in the number of patches into which the sensor field is partitioned by the sensing disks
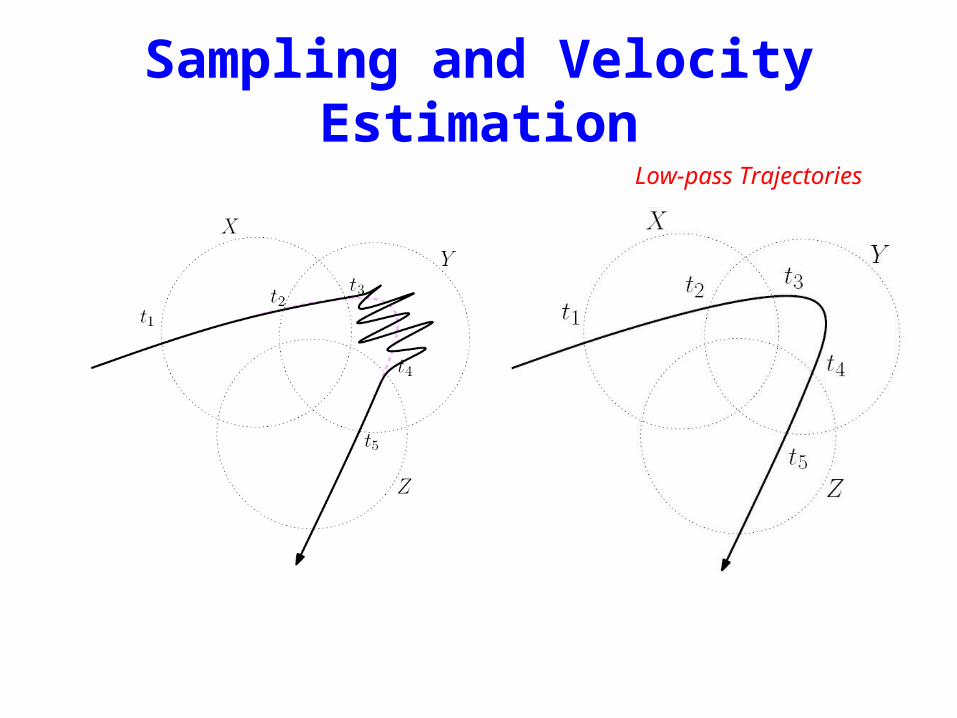
Sampling and Velocity Estimation
Low-pass Trajectories
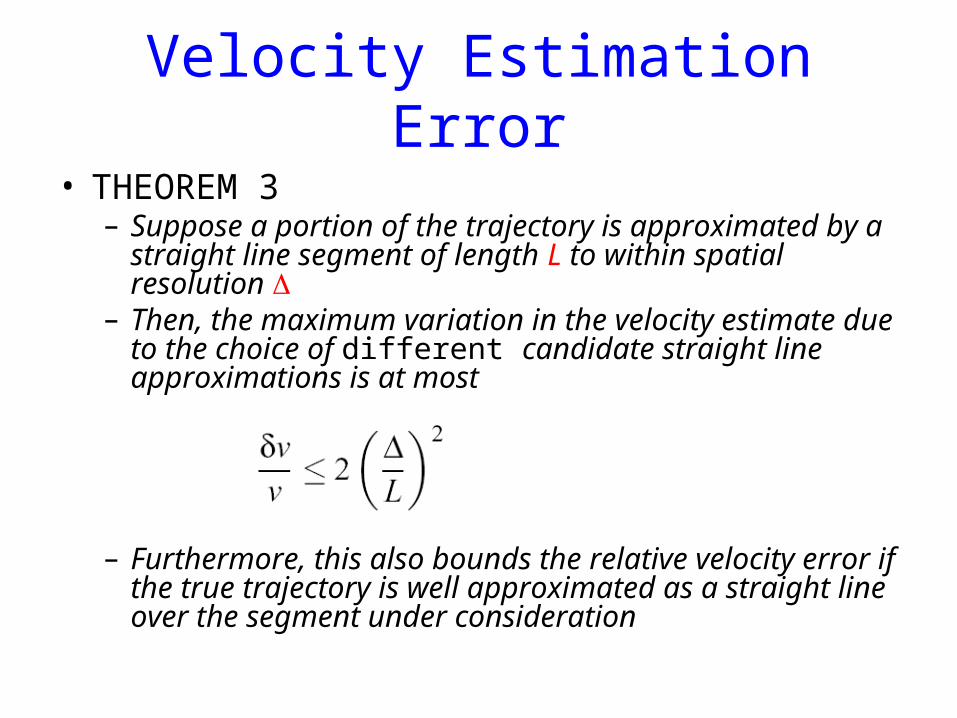
Velocity Estimation Error
• THEOREM 3– Suppose a portion of the trajectory is approximated by
a straight line segment of length L to within spatial resolution
– Then, the maximum variation in the velocity estimate due to the choice of different candidate straight line approximations is at most
– Furthermore, this also bounds the relative velocity error if the true trajectory is well approximated as a straight line over the segment under consideration
Outline
• Introduction• Geometry of Binary Sensing• Fundamental Limits• Tracking Algorithms• Simulation Results• Mote Experiments• Closing Remarks• Comments
Tracking Algorithms
• I– be the subset of sensors whose binary output
is 1 during the relevant interval
• Z – be the remaining sensors whose binary output
is 0 during this interval
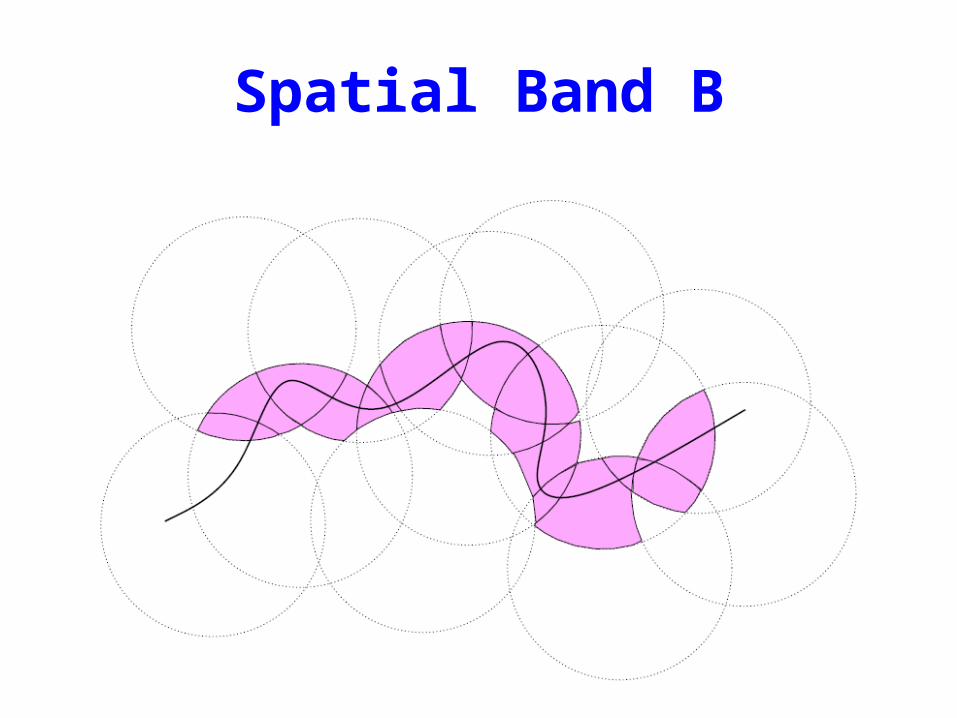
Spatial Band B
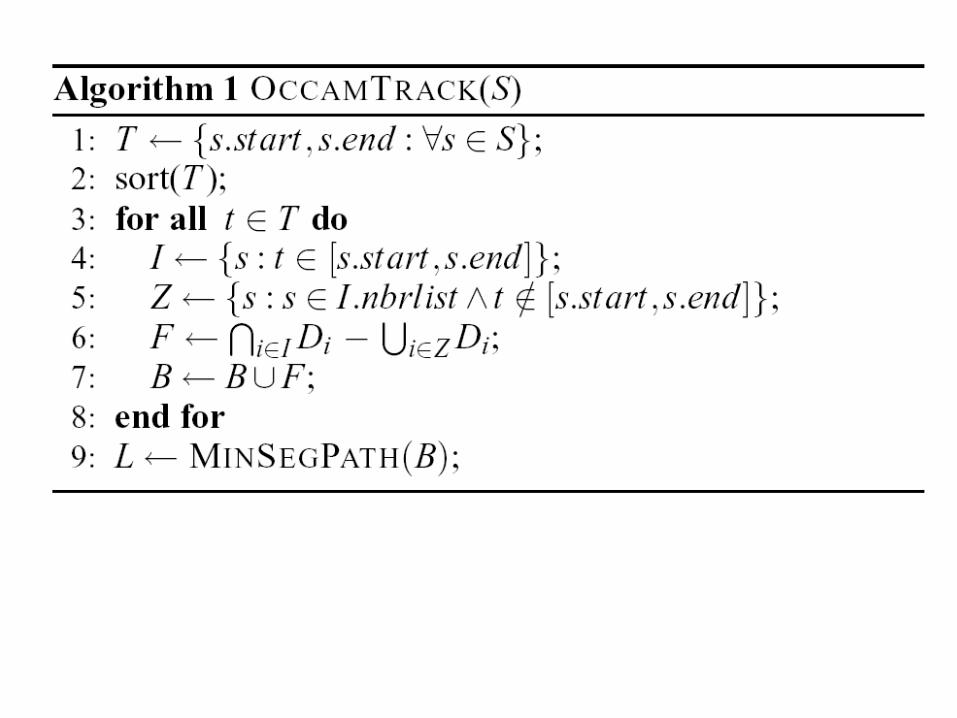
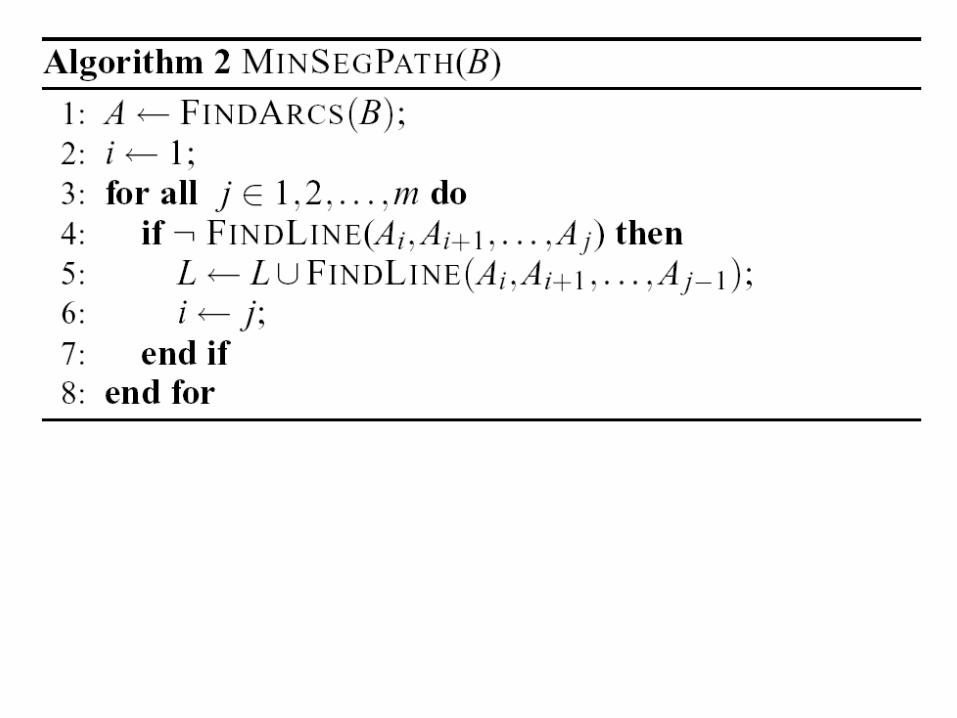
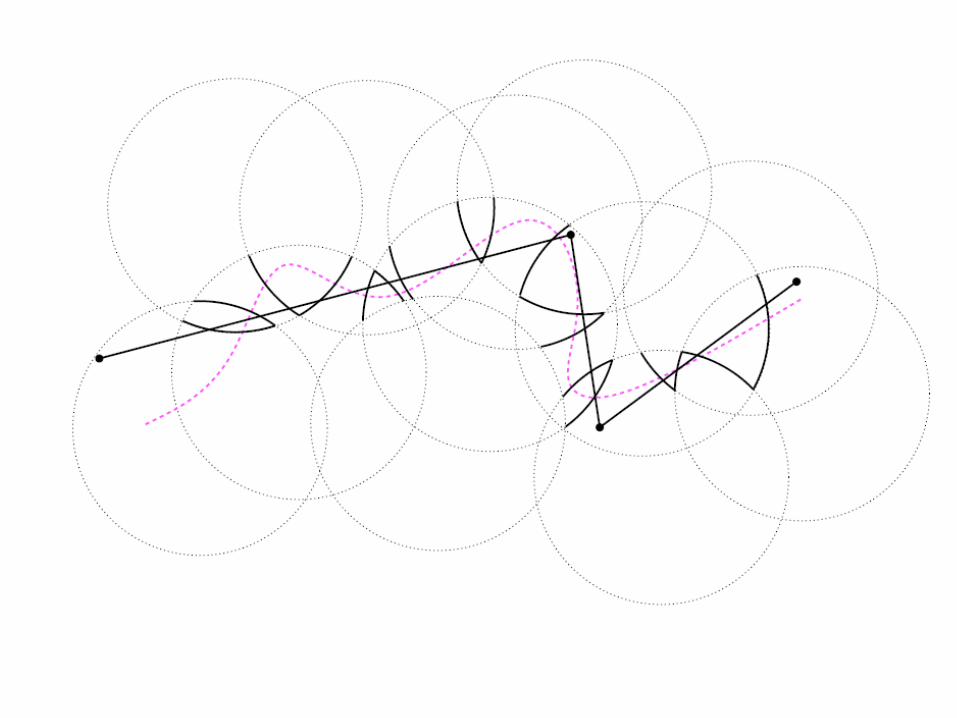
Analysis of OCCAMTRACK
• THEOREM 4– The algorithm OCCAMTRACK computes a
piecewise linear path that visits the localization arcs in order and uses at most twice the optimal number of segments in the worst-case
– If there are m arcs in the sequence, then the worst-case time complexity of OCCAMTRACK is O(m3)
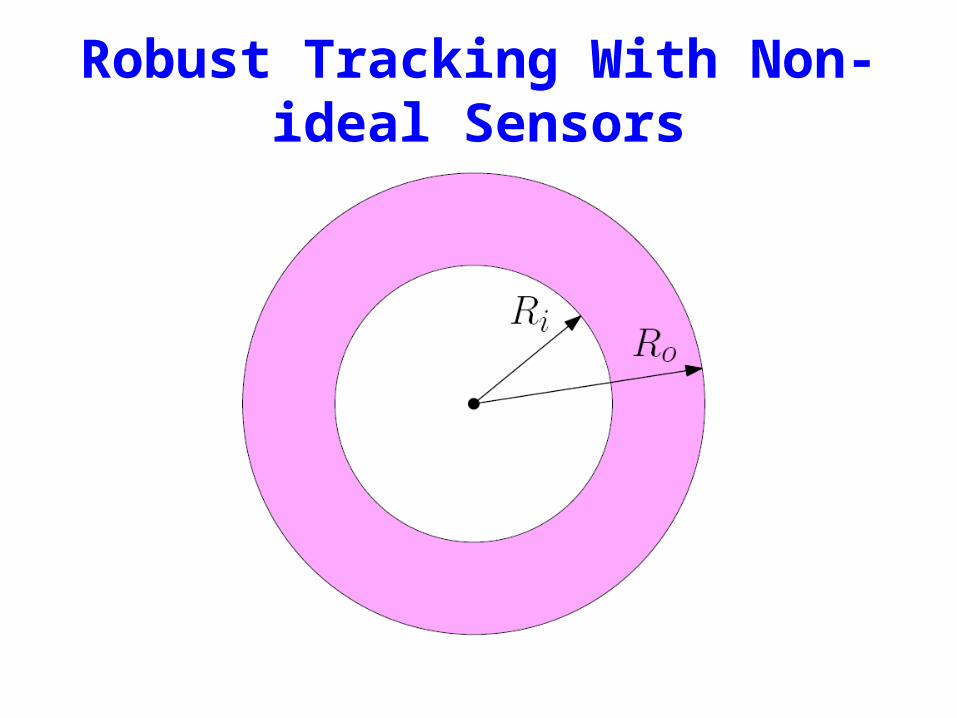
Robust Tracking With Non-ideal Sensors
Particle Filtering Algorithm
• At any time n, we have K particles (or candidate trajectories)– with the current location for the kth particle denoted b
y xk[n]
• At the next time instant n+1, suppose that the localization patch is F– Choose m candidates for xk [n+1] uniformly at random
from F
• We now have mK candidate trajectories• Pick the K particles with the best cost functions
Cost Function
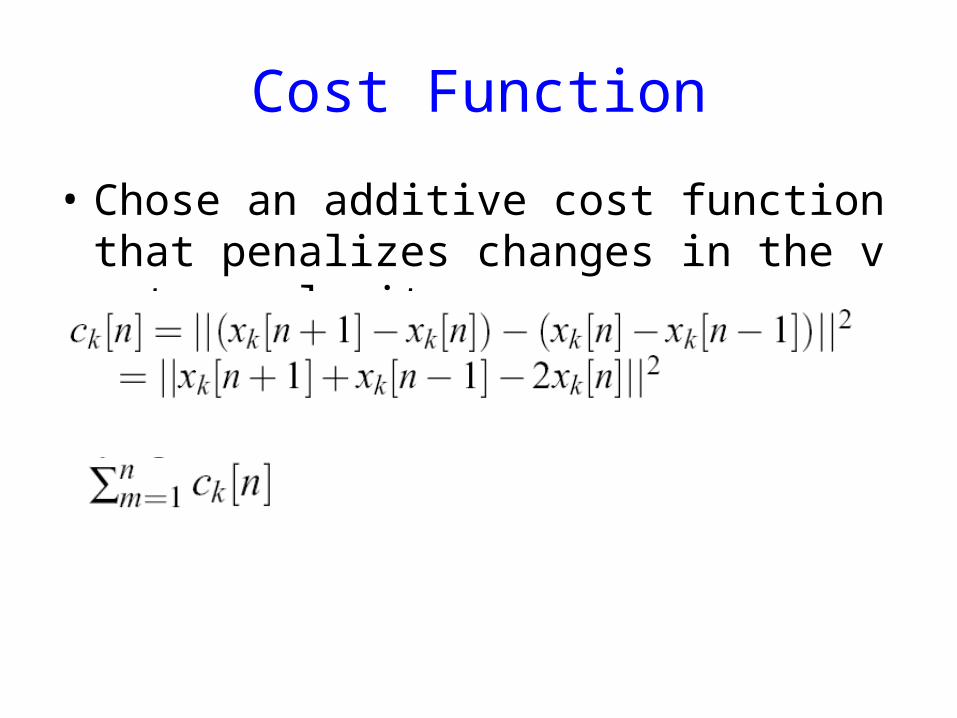
• Chose an additive cost function that penalizes changes in the vector velocity
Geometric Postprocessing
• Particle filtering algorithm described above gives a robust estimate of the trajectory consistent with the sensor observations
• But it provides no guarantees of a “clean” or minimal description
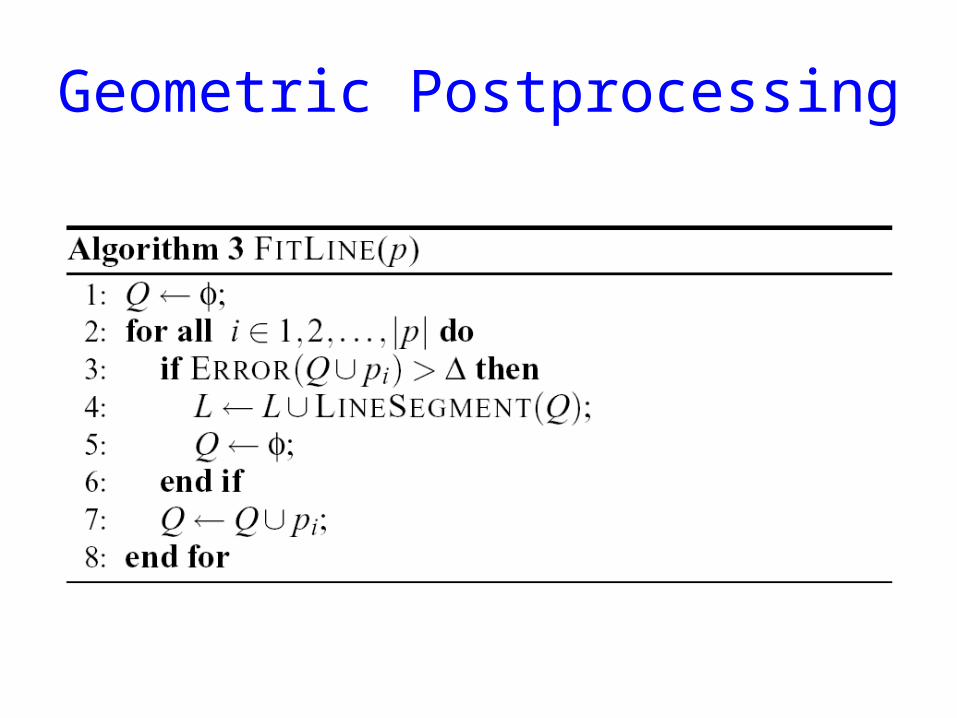
Geometric Postprocessing
Outline
• Introduction• Geometry of Binary Sensing• Fundamental Limits• Tracking Algorithms• Simulation Results• Mote Experiments• Closing Remarks• Comments
Simulation Results
• The code for OCCAMTRACK was Written in C and C++
• The code for PARTICLE-FILTER was written in Matlab
• The experiments were performed on an AMD Athlon 1.8 Ghz PC with 350 MB RAM
OCCAMTRACK with ideal sensing
• A 1000×1000 unit field• Containing 900 sensors in a regular 30×30 grid• Sensing range for each sensor was set to 100
units• Geometric random walks to generate a variety of
trajectories– Each walk consists of 10 to 50 steps, where each
step chooses a random direction and walks in that direction for some length, before making the next turn
• Each trajectory has the same total length• Generated 50 such trajectories randomly
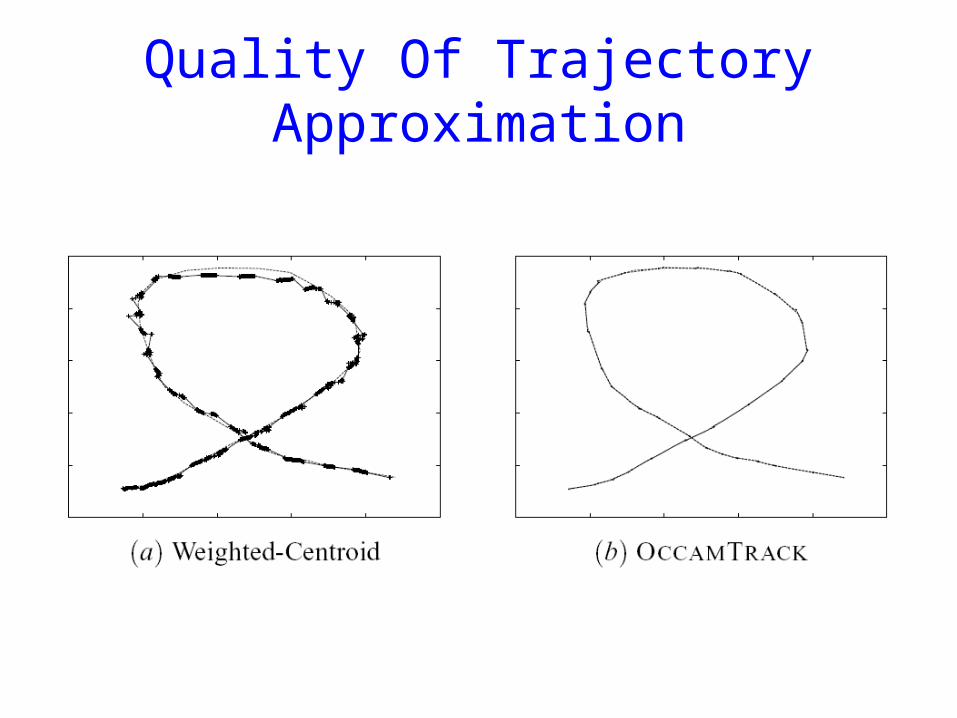
Quality Of Trajectory Approximation
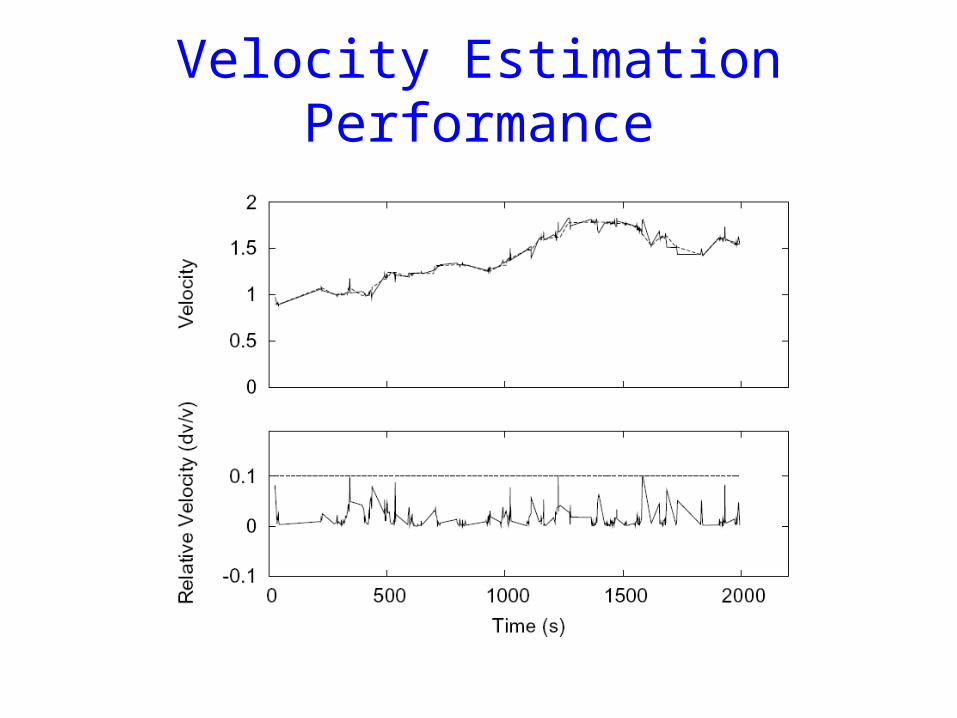
Velocity Estimation Performance
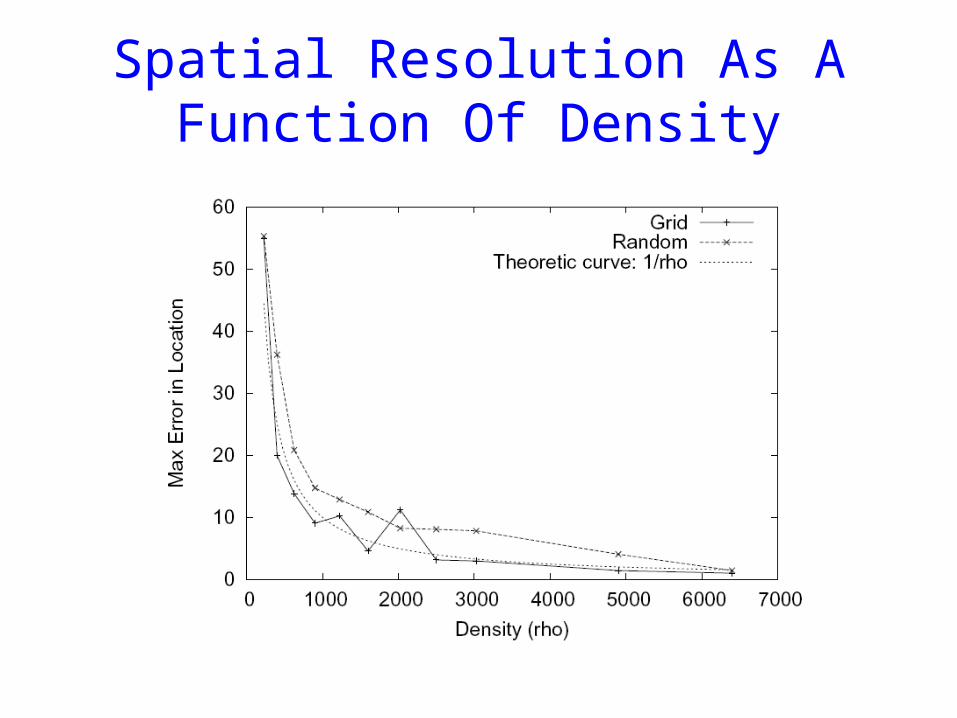
Spatial Resolution As A Function Of Density
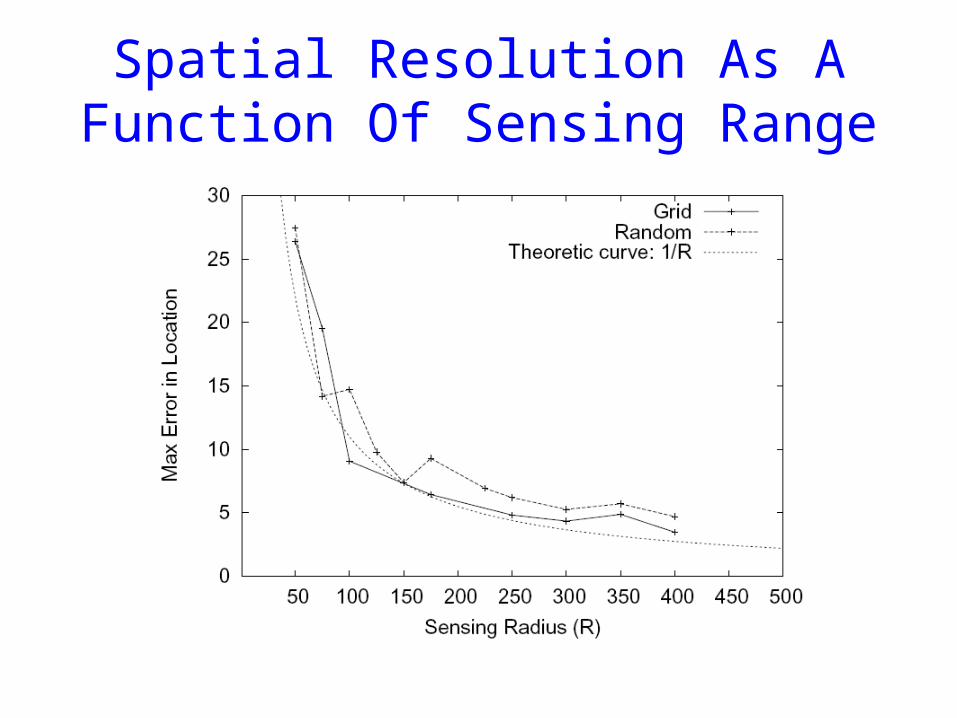
Spatial Resolution As A Function Of Sensing Range
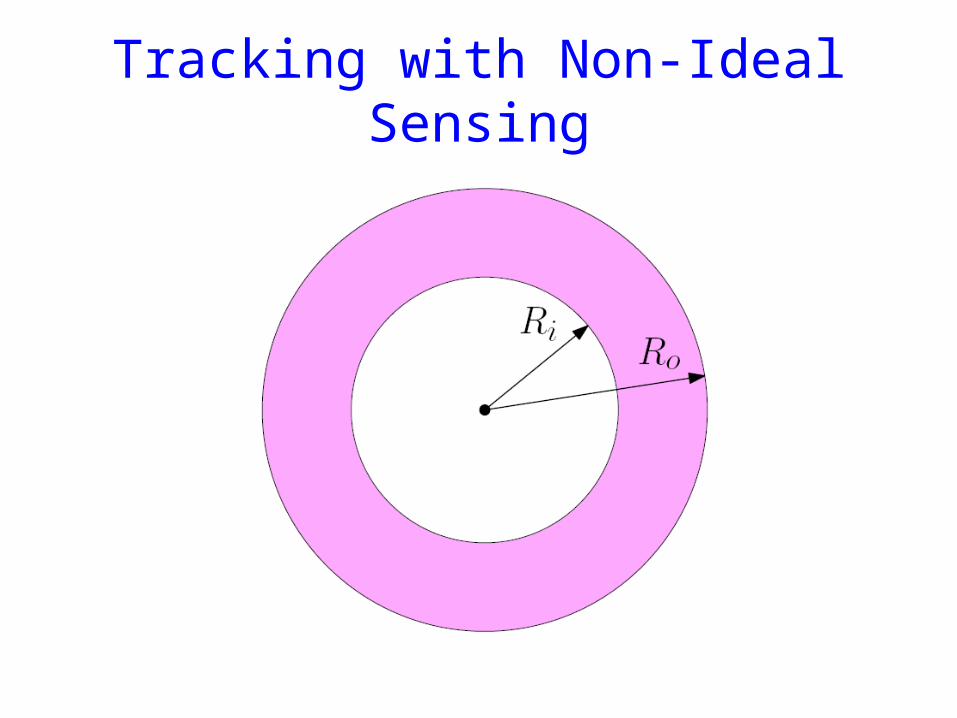
Tracking with Non-Ideal Sensing
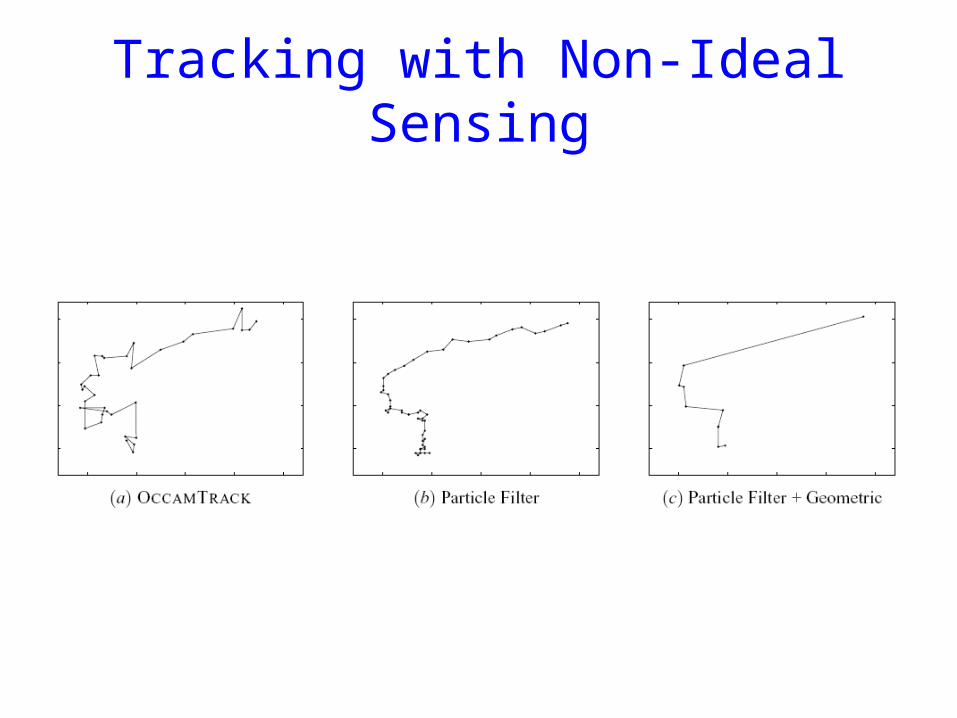
Tracking with Non-Ideal Sensing
Outline
• Introduction• Geometry of Binary Sensing• Fundamental Limits• Tracking Algorithms• Simulation Results• Mote Experiments• Closing Remarks• Comments
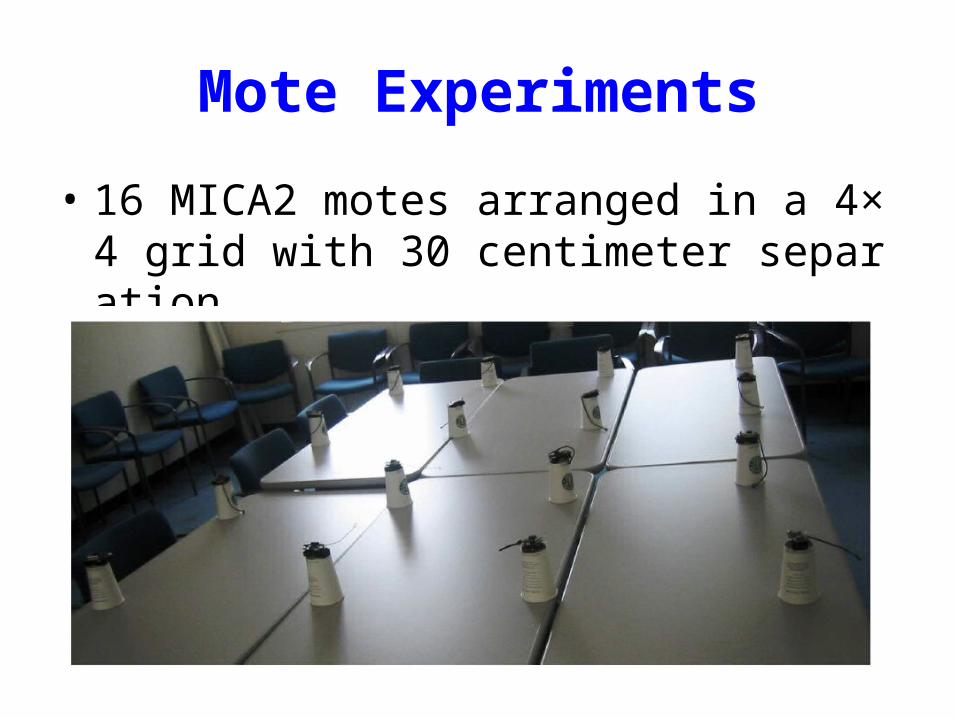
Mote Experiments
• 16 MICA2 motes arranged in a 4×4 grid with 30 centimeter separation
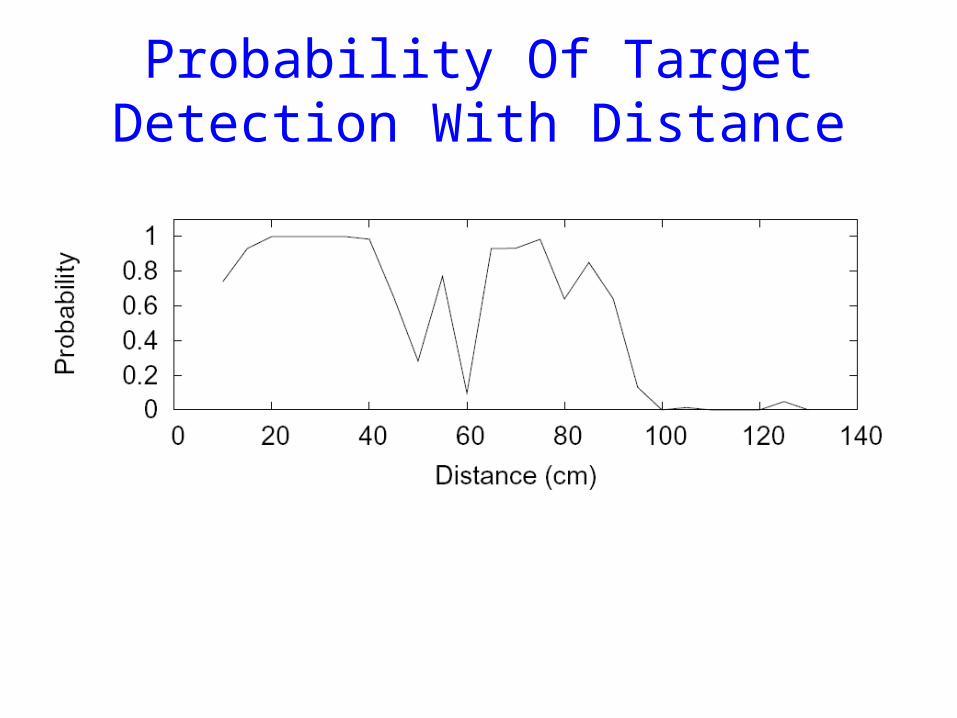
Probability Of Target Detection With Distance
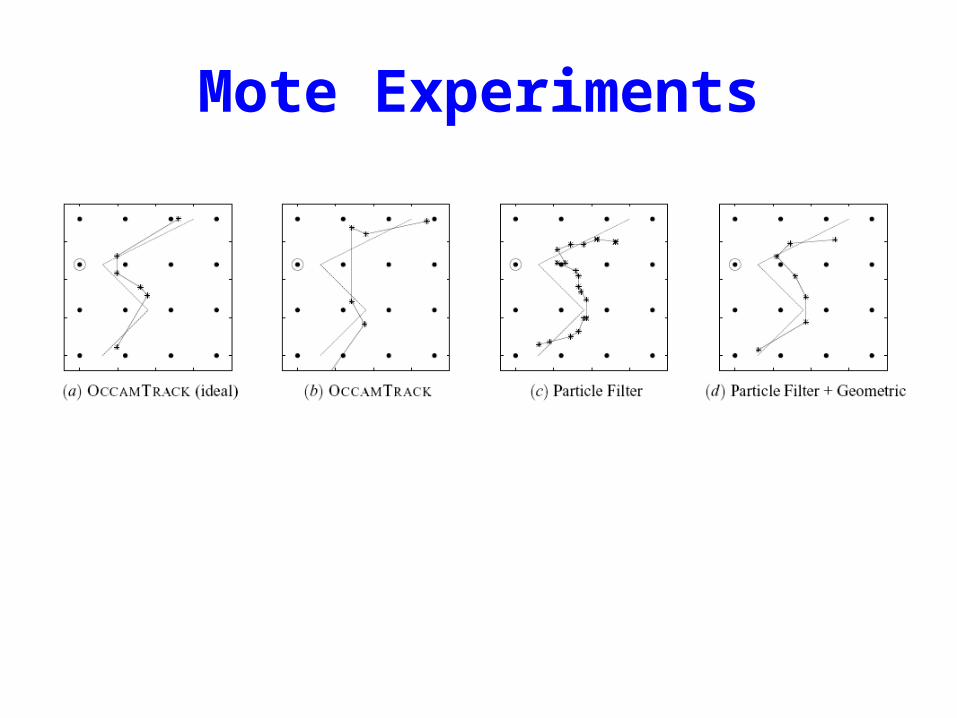
Mote Experiments
Outline
• Introduction• Geometry of Binary Sensing• Fundamental Limits• Tracking Algorithms• Simulation Results• Mote Experiments• Closing Remarks• Comments
Closing Remarks
• Have identified the fundamental limits of tracking performance possible with binary proximity sensors
• Have provided algorithms that approach these limits
Closing Remarks
• Results show that the binary proximity model, despite its minimalism, does indeed provide enough information to achieve respectable tracking accuracy– assuming that the product of the sensing radi
us and sensor density is large enough
Future Works
• An in-depth understanding, and accompanying algorithms, for multiple targets is therefore an important topic for future investigation
• To incorporate additional information (e.g., velocity, distance) if available
• To embed Occam’s razor criteria in the particle filtering algorithm
Outline
• Introduction• Geometry of Binary Sensing• Fundamental Limits• Tracking Algorithms• Simulation Results• Mote Experiments• Closing Remarks• Comments
Comments
• Strength – A simple yet robust algorithm proposed for target trac
king in sensor networks– Complete work
• Analysis• Simulation• Experiments
• Weakness– For non-ideal case, performance for particle filtering a
nd geometric postprocessing is not mentioned• Time complexity could be high
Thank You Very Much For Your Attention!
Any More Questions?


















![IJETA-V2I6P7]:Nikita Shrivastava, Prof. Amit Dubey](https://img.pdfslide.net/doc/110x75/5695cf1a1a28ab9b028c9cae/ijeta-v2i6p7nikita-shrivastava-prof-amit-dubey.jpg)










