Embed Size (px)
Citation preview

Target visibility level and detection distanceon a driving simulatorR Bremond PhD, V Bodard MSc, E Dumont PhD and A Nouailles-Mayeur PhDUniversite Paris Est, Institut Francais des Sciences et Technologies des Transportsde l’Amengament et des Reseaux, Infrastructure et Mobilite – Laboratoire Exploitation,Perception, Simulateurs et Simulations, Paris, France
Received 8 August 2011; Revised 25 November 2011; Accepted 3 December 2011
The visibility level (VL), a quality index in road lighting design, also serves toassess automotive lighting performance. Unlike illuminance levels, the VLprovides a link between lighting design and driving performance. The referenceperformance of the VL is the detection of a small uniform target, standing on auniform background (the road surface). Still, VL is subject to a number of caveatswith regards to the driving task. We address the non-realistic nature of thereference target (a uniform square). A driving simulation experiment wasconducted in a virtual night-time rural highway environment. The subjectsdrove along the road and came across different targets on the roadside. Thedetection distances were recorded and compared with the corresponding VL,showing rather good agreement.
1. Introduction
The main purpose of automotive lighting is toprovide highway visibility to the driver (asecondary goal is to signal the vehicle to otherroad users). The quantitative assessment ofhighway visibility is a challenging issue, inwhich the main theoretical background comesfrom psychophysics and addresses targetdetection.
For road and vehicle lighting design prac-titioners, Adrian’s empirical target visibilitymodel is the prevailing alternative to illumi-nance and luminance levels.1,2 The model isbased on a set of psychophysical data3 andpredicts the threshold contrast of a flatuniform target on a uniform background.The visibility level (VL) is the ratio betweenthe actual contrast of a target and its thresh-old contrast. Thus, VL¼ 1 means that the
considered target is just visible, albeit inlaboratory conditions. This index is cited inseveral national and international stan-dards.4–6 In order to account for the factthat visibility in complex driving situationsrequires higher thresholds than in laboratoryconditions, lighting engineers introduce a so-called field factor, which is equivalent to athreshold VL required to ensure safe driving.For instance, VL¼ 7 was proposed in theFrench recommendations for road lighting.5
Automotive front-lighting designers havealso considered the VL as an alternative tousual indices in their field, mostly based onilluminance distributions.7–10 The reason isthe same: Contrary to illuminance, VL isdirectly related to a key visual performance inthe driving task, namely detection. AssumingVL is related to visibility distance, which is inturn related to accident risk and severity,11
VL might be considered in accident scenariosto rate lighting systems in terms of safety.
Despite these interesting features, VL suf-fers from a variety of problems. First, setting
Address for correspondence: Roland Bremond, UniversiteParis Est, IFSTTAR, 58 Boulevard Lefebvre, 75015 Paris,FranceE-mail: [email protected]
Lighting Res. Technol. 2013; 45: 76–89
� The Chartered Institution of Building Services Engineers 2011 10.1177/1477153511433782

a unique field factor does not address the factthat the same VL may lead to variousperformance levels depending on the context(e.g. speed, traffic, task demand, etc.).12
Further discussions about the relevant targetshape,13 about measurement issues14 andabout the impact of the driving task ontarget detection performance15–18 have pre-vented its adoption in automotive lightingevaluation so far. Computer visionapproaches have also been proposed19–21 toaddress implementation issues raised by non-uniform targets and backgrounds, as well asfor large targets.
Among the caveats with regards to theactual driving task, we address in this paperthe non-realistic nature of the small uniformgrey square target usually associated with theVL index. Although this standard target wasinitially chosen because of its key featureswith respect to hazard detection in terms ofsize and uniformity,22 it is a rather unlikelyobject to find on the road.
An experiment was conducted, in the hopeof facilitating the implementation of VL forautomotive lighting design. Several issues areaddressed:
1) The first one, as we just said, is thepeculiarity of the standard target. In thepresent study, more familiar targets werecompared to the conventional grey squaretarget.
2) The second issue is the time-varyingapparent size of the target as the drivercomes closer. This was solved by conduct-ing the study in a driving simulator.
3) The third issue was to identify a straight-forward link between lighting recommen-dations and road safety.
The aim of electric lighting is to improvedrivers’ visual performance at night, given thatbetter anticipation leads to improved roadsafety.22 The current belief is that using VL as
a lighting index is more relevant for road safetythan using illuminance. Still, it describesdetection performance, not a safety index,such as accident risk. To improve the linkbetween VL and road safety, we introduce thedetection distance as an intermediate variable.We can then use the stopping distance as asafety reference for lighting design. Then, thedetection distance provides an input for quan-titative risk models. For instance, Gallen et al.relate detection distance to accident probabil-ity and severity.11 Their model uses driverparameters such as the detection distance andreaction time (RT), road parameters such asslope, curvature and friction, as well as vehiclespeed and dynamics parameters, and com-putes the stopping distance. Then, the accidentseverity can be related to the relative speedbetween the driver’s car and the target at themoment of collision.
In the current context of energy and costsaving, this quantitative approach mayimpact the lighting design methodology:based on the standard obstacle collisionavoidance scenario, adapting the lightingsystem to those characteristics of the roadwhich affect the stopping distance regardlessof the drivers visual performance wouldarguably increase its efficiency.
The driving simulation experiment wasconducted with 27 subjects, in a virtualnight-time highway environment illuminatedwith headlamps only, and devoid of traffic. Atarget detection performance was assessed forthe standard uniform square and for objectsmore familiar to drivers: a road sign, apedestrian and a car. These targets werepresented either as uniform grey silhouettes,or with a more realistic texture. The subjectshad to detect the various targets while driv-ing, and the detection distance was recorded.This distance was then compared to the VLcomputed from the size and contrast of thetarget at the time of detection.
The next section describes the experimentalmaterial and method. Section 3 describes with
Target visibility level and detection distance on a driving simulator 77
Lighting Res. Technol. 2013; 45: 76–89

more details the photometric analysis, andSection 4 gives the experimental results of thedriving simulation experiment. The lastsection summarizes the main results anddiscusses how they may help improve auto-motive lighting design.
2. Driving simulator experiment
2.1. Participants
A total of 27 subjects (5 women, 22 men),with a mean age of 35 years, participated inthe experiment. They were all licensed driverswith normal or optically corrected vision(tested for night vision with EssilorErgovision tester) without known visual orauditory impairment. The subjects scoredbetween 10/10 and 12/10 in a binocularacuity test, except one who scored 8/10.Under these conditions, a statistical analysisusing analysis of variance did not show anyeffect of visual acuity on visual performance.
Although they were recruited fromIFSTTAR employees, all subjects were naiveto the purpose of the experiment and weregiven a full explanation of the experimentalprocedure. A written informed consent wasobtained before participation, with the optionto withdraw from the study at any time.
2.2. Apparatus
The driving simulation experiment tookplace in a dark room dedicated to photomet-rically controlled psycho-visual experiments.The driving simulator comprised a steeringwheel with force feedback, a gear box andpedals, but no motion system. IFSTTAR’sown software (SIM2 and DR2) served to runthe simulator and to graphically render thevirtual environment.23 The computer graphicsimages were displayed at a 60-Hz frame rateby means of a SXGA (1280� 1024) video-projector. The subjects sat in a car seatmounted on a platform with adjustableheight so as to ensure that they all had theireyes level with the centre of the projection
screen. The screen was 3m in front of thesubjects. It was 2m in width and 1.5m inheight, subtending a visual field 378 horizon-tally and 308 vertically.
2.3. Virtual night-time highway environment
The geometry of the road was that of arural four-lane freeway with central separa-tion (see Figure 1(a)). Vehicle headlampillumination was simulated by means of a
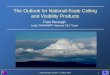
Figure 1 Three-step special effect to simulate headlightillumination conditions: (a) daytime scene, (b) with blackfog and (c) with headlamp beam pattern texture.(Available in colour in electronic version of paper.)
78 R Bremond et al.
Lighting Res. Technol. 2013; 45: 76–89

computer graphics special effect whichinvolves three steps, illustrated in Figure 1.The daytime highway environment is firstrendered using photographical textures(Figure 1(a)). A hardware accelerated blackfog effect is then applied which consists ofmultiplying the colour C0 of every pixel by anexponential function of the depth Z to mimicthe inverse square law of illumination:
C ¼ C0 exp �k2Z2
� �ð1Þ
The parameter k was adjusted so that thebrightest pixels in the scene would fade toblack at about 200m (Figure 1(b)). Finally, atransparency texture built from the intensitydistribution of a high-beam headlamp isapplied to introduce a sense of the beampattern, with darker areas on the sides (Figure1(c)). This rendering technique was designedto provide a subjective sense of headlightillumination in dynamic conditions. It doesnot produce an accurate luminance patternon the road (see a luminance map Figure 2),
and thus, it cannot serve to assess headlightperformance.
2.4. Reaction time
Driving on a highway, at night, withouttraffic, leads to high speeds. It is even worsewith driving simulators in which speeds tendto be higher than on the road.24–26 Indeed, themean speed in our experiment was 151 km/h(93.8mph). This high speed, combined withRT, has a significant impact on the measuredvisibility distance.
In order to account for the distance runby the car between the moment the driver seesthe target and the moment she or he pushesthe button, the mean RT of every subject wasmeasured prior to the driving simulationexperiment. During this pre-test, the subjectswere presented with a uniform grey back-ground on which a sequence of 13 uniformgray square targets were shortly displayed,with a high contrast. The time intervalbetween successive targets was random. Thesubjects were simply asked to signal theappearance of a target by pressing a buttonon the steering wheel (the same button as inthe driving simulation experiment). The mean
Figure 2 Left: Snapshot of the virtual environment. Right: Luminance map measured on the projection screen(logarithmic grey scale)
Target visibility level and detection distance on a driving simulator 79
Lighting Res. Technol. 2013; 45: 76–89

RT was computed for every subject (the firstthree targets were discarded) and was laterused in order to correct the estimated targetdetection distance.
The mean RT over all subjects was 0.43seconds (with a standard deviation of 0.015seconds), which corresponds to 18 meters at151 km/h. Given the inter-individual variabil-ity in terms of RT (between 0.33 seconds and0.58 seconds), individual corrections of thedetection distances were preferred to a uni-form correction.
2.5. Protocol
The independent variable was the type oftarget, of which there were seven: a uniformsquare, a uniform road sign, a uniformpedestrian, a uniform car, a textured roadsign, a textured pedestrian and a textured car(see Figure 3).
During the experiment, each of the seventargets was presented eight times to everysubject. Targets stood next to the right-hand-side pavement marking. They were set inrandom order, to prevent drivers from antic-ipating the type of the next target, and toavoid any learning bias. They were also set atrandom positions along 600m long roadsections, with a minimum of 200m betweensuccessive targets, to prevent drivers fromanticipating the location of the next target.The same sequence of targets was used for allthe subjects, to avoid any bias from thevariations in the local target backgroundacross subjects.
After the RT pre-test, every participant wasgiven an opportunity to become familiar withthe simulator by driving in the same virtualenvironment as in the experiment until theyfelt comfortable with the equipment, whichusually happened after a few minutes. Theparticipants were then given the followinginstructions: ‘You are going to drive on ahighway at night. From time to time, you willmeet an object on the roadside. Each time yousee one of these objects, you will tell that you
have seen it by pushing the button on thesteering wheel’. The complete duration ofthe experiment was less than half an hour foreach subject, including the pre-test and thefamiliarization.
3. Photometric analysis
3.1. Luminance measurements
In order to estimate the photometricparameters which are needed to implementthe Adrian target visibility model, luminancemeasurements were performed on the dis-played computer graphics images, using animaging photometer with a 980� 980 pixelresolution (Minolta CA2000). Performingthese measurements in the dynamic condi-tions of the experiment was not feasible,because of the exposure time required by thephotometer. Therefore, snapshots of the vir-tual environment were used, taken every 10mfrom 150m down to 20m for each type oftarget. This resulted in 14� 7¼ 90 luminancemaps (see for example, Figure 2).
3.2. Computation of VLs
A mask was manually defined for everytype of target at every distance, in order to tagtarget pixels in the luminance maps(Figure 4). The luminance of a target wascomputed as the mean luminance of the targetpixels. From the number of pixels in the maskand from the angular size of a pixel, it wasalso possible to estimate the equivalent angu-lar size of each target, defined as the angularsize of a square subtending the same numberof pixels npix:
� ¼ 2atanapix2D
ffiffiffiffiffiffiffiffi�pixp
� �ð2Þ
where apix is the size of a pixel (about1.56mm) and D is the distance between thesubjects and the screen (3m).
80 R Bremond et al.
Lighting Res. Technol. 2013; 45: 76–89

Figure 3 Snapshots of the seven targets presented to the participants in the driving simulator (here at 20 m). Left:Uniform targets; right: Textured targets. From top to bottom: Uniform square, road sign, pedestrian and car.(Available in colour in electronic version of paper.)
Target visibility level and detection distance on a driving simulator 81
Lighting Res. Technol. 2013; 45: 76–89

For the background and adaptation lumi-nance, we followed the approach proposed byMoon and Spencer for non-uniform sur-rounds.27 The background is containedwithin the region covered by foveal vision, adisc approximately 1.58 in diameter centred inthe middle of the target. So the pixels withinthat region, excluding target pixels, weretagged as background pixels and the back-ground luminance Lb was computed as themean of these luminance values. As for theadaptation luminance La, Moon and Spencerestablished it to be a linear combination ofbackground luminance Lb and surroundluminance:
La¼ 0:923Lbþ0:0096
�!X"ij>"f
Lij"�2ij cos"ij ð3Þ
where " is the solid angle subtended by a pixelfrom the position of the subjects, "ij andLij are, respectively, the eccentricity
(in arcminute) and luminance of the pixel atcoordinates (i,j), and "f is the foveal half angle(about 0.758).
It was thus possible to extract theparameters of the Adrian model fromthe luminance maps, and then to computethe VL of every target at every distance,assuming a 0.2-second presentation time (astandard value for lighting design), and a35-year-old observer (the mean age of theparticipants in the experiment). The resultsare summarized in Table 1. There are a fewcases in which the VL could not becomputed, mostly because the target wastoo large (�418). The luminance variationinside a target is described with the lumi-nance standard deviation (SD, in percent-age, with respect to the mean luminance).‘Uniform’ targets do not lead to SD¼ 0,because even though the reflectance of theobject is uniform, the luminances renderedon the screen are impacted by the beampattern texture.
Figure 4 Illustration of the process to extract photometric data from a luminance map: (a) snapshot of the target(textured pedestrian), (b) corresponding mask (white for target), (c) foveal region from which data are extracted in theluminance map (pixels within the white contours contribute to object luminance; pixels within black contourscontribute to background luminance; surrounding pixels contribute to adaptation luminance). (Available in colour inelectronic version of paper.)
82 R Bremond et al.
Lighting Res. Technol. 2013; 45: 76–89

Tab
le1
Ph
oto
metr
icd
ata
extr
act
ed
fro
mlu
min
an
cem
ap
s(e
.g.Fig
ure
2)
measu
red
on
scre
en
sho
tso
fth
ese
ven
targ
ets
at
dis
tan
ces
Db
etw
een
20
man
d150
ma
D (m)
Siz
e
(arc
min
)
L (cd
/m2)
SD
Lb
(cd
/m2)
C (cd
/m2)
La
(cd
/m2)
VL
Sm
all
targ
et
150
5.4
0.0
87
150%
0.0
76
0.1
34
0.1
56
0.1
140
5.4
0.0
13
300%
0.0
74
�0.8
20
0.1
53
1.1
130
6.2
0.2
10
90%
0.1
01
1.0
69
0.1
82
1.5
120
6.2
0.5
11
22%
0.1
75
1.9
14
0.2
56
4.1
110
7.2
0.9
01
34%
0.2
78
2.2
42
0.3
56
7.9
100
7.2
1.9
98
25%
0.4
72
3.2
31
0.5
42
15.3
90
8.9
4.1
37
31%
0.8
33
3.9
69
0.8
82
34.6
80
9.8
7.9
72
25%
1.4
12
4.6
44
1.4
26
57.0
70
10.7
14.0
39
19%
2.4
13
4.8
19
2.3
68
80.0
60
12.5
23.5
13
27%
4.1
07
4.7
25
3.9
62
108.0
50
14.2
36.0
85
20%
6.0
48
4.9
66
5.7
79
140.3
40
17.9
37.1
99
24%
6.7
26
4.5
30
6.4
12
156.6
30
24.5
24.0
78
19%
4.8
15
4.0
01
4.5
88
158.2
20
35.6
9.4
37
24%
2.0
34
3.6
39
1.9
46
147.4
Un
ifo
rm
sig
n
150
12.2
0.0
00
0.0
08
�1.0
00
0.0
79
0.9
140
12.9
0.0
00
0.0
13
�1.0
00
0.0
86
1.5
130
14.3
0.1
43
113%
0.0
20
6.0
82
0.0
94
7.2
120
16.1
0.3
48
35%
0.0
30
10.5
24
0.1
05
20.4
110
18.0
0.6
33
23%
0.0
61
9.4
41
0.1
37
36.6
100
20.8
0.9
51
26%
0.1
12
7.5
20
0.1
91
52.0
90
23.4
1.7
46
24%
0.1
96
7.9
11
0.2
75
87.7
80
26.6
3.1
33
22%
0.3
87
7.1
01
0.4
59
128.9
70
31.2
5.6
00
22%
0.7
74
6.2
37
0.8
26
173.1
60
36.9
9.3
91
19%
1.5
56
5.0
36
1.5
59
189.4
50
44.7
14.7
79
17%
2.8
40
4.2
03
2.7
72
196.9
40
56.3
21.6
73
14%
5.2
19
3.1
52
5.0
03
177.8
Un
ifo
rm
ped
est
rian
150
16.9
0.0
00
0.0
01
�1.0
00
0.0
63
0.2
140
18.1
0.0
00
0.0
02
�1.0
00
0.0
63
0.4
130
19.2
0.0
46
235%
0.0
04
11.3
26
0.0
67
4.0
120
20.6
0.3
09
58%
0.0
10
30.4
78
0.0
74
29.0
110
23.2
0.5
47
27%
0.0
18
29.0
05
0.0
84
54.3
100
26.0
0.8
74
34%
0.0
45
18.5
02
0.1
11
81.9
90
29.2
1.6
05
32%
0.0
84
18.1
61
0.1
50
141.4
80
32.5
2.8
26
30%
0.1
89
13.9
77
0.2
52
200.0
70
37.1
4.8
42
34%
0.3
96
11.2
16
0.4
49
263.7
60
43.6
8.4
46
27%
0.6
90
11.2
32
0.7
29
369.5
50
52.1
13.6
74
27%
1.3
51
9.1
19
1.3
53
388.4
Target visibility level and detection distance on a driving simulator 83
Lighting Res. Technol. 2013; 45: 76–89

Un
ifo
rm
car
150
35.6
0.1
36
111%
0.0
02
61.6
09
0.0
65
21.8
140
37.9
0.3
48
32%
0.0
07
49.1
61
0.0
71
55.7
130
42.2
0.6
10
20%
0.0
28
20.5
29
0.0
92
89.2
120
46.0
1.0
48
19%
0.0
74
13.1
12
0.1
37
127.1
100
55.7
3.9
19
21%
0.3
46
10.3
20
0.3
93
282.2
Textu
red
sig
n
150
11.0
0.0
00
0.0
02
�1.0
00
0.0
69
0.2
140
11.4
0.0
00
0.0
05
�1.0
00
0.0
73
0.5
130
13.6
0.0
00
0.0
07
�1.0
00
0.0
76
1.0
120
15.9
0.0
11
510%
0.0
09
0.1
36
0.0
80
0.1
110
15.8
0.1
49
135%
0.0
18
7.2
84
0.0
91
8.8
100
18.6
0.3
30
76%
0.0
44
6.5
91
0.1
21
20.1
90
21.2
0.5
33
70%
0.0
71
6.5
48
0.1
49
33.1
80
25.2
0.8
48
74%
0.1
25
5.7
74
0.2
07
50.6
70
29.1
1.5
41
78%
0.2
61
4.9
01
0.3
41
76.0
60
31.8
3.0
93
71%
0.5
36
4.7
74
0.6
06
116.9
50
39.2
5.0
18
76%
1.1
34
3.4
24
1.1
72
121.1
40
49.7
7.9
87
80%
2.2
91
2.4
86
2.2
78
115.0
Textu
red
ped
est
rian
150
16.9
0.0
00
0.0
02
�1.0
00
0.0
64
0.4
140
18.1
0.0
00
0.0
02
�1.0
00
0.0
63
0.4
130
19.4
0.0
00
0.0
03
�1.0
00
0.0
67
0.8
120
20.5
0.1
16
137%
0.0
09
11.2
27
0.0
74
10.2
110
22.5
0.3
54
64%
0.0
19
17.7
96
0.0
85
33.2
100
25.9
0.5
60
53%
0.0
43
12.1
09
0.1
09
51.5
90
29.2
1.0
23
50%
0.0
88
10.5
68
0.1
55
85.4
80
32.5
1.7
98
64%
0.1
70
9.5
46
0.2
35
128.4
70
37.1
2.8
96
68%
0.3
46
7.3
80
0.4
02
161.4
60
43.6
5.3
52
75%
0.5
73
8.3
45
0.6
21
257.9
50
52.1
8.6
78
75%
1.2
00
6.2
34
1.2
13
257.4
Textu
red
car
150
36.6
0.0
00
0.0
03
�1.0
00
0.0
67
1.2
140
38.3
0.0
00
0.0
04
�1.0
00
0.0
68
1.7
130
42.1
0.0
05
710%
0.0
06
�0.1
64
0.0
71
0.4
120
44.5
0.1
15
133%
0.0
11
9.1
88
0.0
77
18.0
110
49.1
0.2
82
67%
0.0
28
9.1
99
0.0
95
41.8
100
55.1
0.4
96
44%
0.0
48
9.3
72
0.1
17
70.1
aT
arg
et
an
gu
lar
size
(wh
en
small
er
than
18)
;m
ean
lum
inan
ce,
L;
stan
dard
devia
tio
no
flu
min
an
ce,�
L;
back
gro
un
dlu
min
an
ce,
Lb;
con
trast
,C
;ad
ap
tati
on
lum
inan
ce,
La
an
dvis
ibil
ity
level,
VL
(co
mp
ute
dfo
ra
35�
year�
old
ob
serv
er
wit
ha
0.2�
seco
nd
pre
sen
tati
on
tim
e).
84 R Bremond et al.
Lighting Res. Technol. 2013; 45: 76–89

4. Results
Henceforth, detection distance obtained fromthe participants is referred to as theExperimental Detection Distance (EDD),whereas the detection distance obtainedfrom VL values is referred to as theComputed Detection Distance (CDD).
4.1. Target detection performance
The EDD values are presented in Table 2for every target. They are corrected toaccount for individual RT (see Section 2.4).Each value is a mean over 8 detections and 27drivers (216 data). A few cases (5 out of 1512:3 uniform squares, and 2 road signs) werediscarded because the targets had not beendetected at all. The relative visibility withrespect to the reference target (the uniformsquare), defined as the ratio between theirrespective EDD, is also given in Table 2.Analysis of variance showed that the ‘target’factor is statistically significant (p50.001).
These results call for several comments.First, as expected, the reference target forlighting design – the uniform square – isharder to detect than most tested targets.However, the ‘road sign’ target is unexpect-edly harder to detect, although the differenceis small (6%). Second, the EDD of the mostvisible target (the uniform car) is only 40%higher than that of the reference target. Thisvalue can be interpreted as a ‘shape bias’introduced when using the small square as areference, instead of a big car, in terms ofdetection distance. Third, targets are morevisible when they are uniform than when they
are textured. This may be due to the highreflectance of the uniform targets, whichmakes them more conspicuous than the tex-tured targets, which are darker in some parts.The small uniform target is indeed a worst-case scenario, which justifies its use as areference for assessing the performance oflighting systems in terms of visibility.
4.2. VL and detection distance
The first comment to be made about theVLs in Table 1 is that the targets are darkerthan their background when they appear inthe distance, and then ‘vanish’ at some pointbefore their contrast becomes positive as thedriver comes closer. However, the VL beforethis point never reaches values much higherthan 1, because of the combined effect ofsmall angular size and low absolute contrast.
From the estimated VL values, we com-puted detection distance values correspondingto a threshold VL of 7, a field factor valuerecommended for road lighting.5,13,28 Therationale is to compute the detection distanceas if the driver detects the targets at the verymoment their VL reaches the thresholdVL¼ 7. Table 3 shows this CDD for everytarget, compared to the corresponding meanEDD recorded on the driving simulator.
In most cases, the computed visibility(CDD) is very close to the measured visibility(EDD), and the highest difference is 12%(Table 3). This comes as a confirmation thatthe VL is a relevant index for assessinghighway visibility. Setting the threshold toVL¼ 7 yields CDD values close enough to theEDD values so that this threshold can be
Table 2 Mean detection distance for each target. The distance and the VL are computed at the moment of targetdetection, taking into account the individual reaction time
Target Reference(uniform square)
Road sign Road sign(uniform)
Pedestrian Pedestrian(uniform)
Car Car (uniform)
EDD 106 100 120 124 128 122 149VL 9 18 13 6 9 14 26RV ratio 1.00 0.95 1.20 1.17 1.22 1.15 1.41
RV: relative visibility.
Target visibility level and detection distance on a driving simulator 85
Lighting Res. Technol. 2013; 45: 76–89

considered relevant for a simple driving task,such as the one experienced by the partici-pants on the driving simulator. However, theCDD values are most of the time higher thanthe EDD reference values. Given that EDDvalues would be even smaller if the driverswere not expecting the targets,29 this suggeststhat a higher VL threshold should be consid-ered, in order to compute safer detectiondistance estimates.
4.3. Stopping distance
Let us now consider the impact of thedetection distance on the stopping distance,which is directly related to road safety. On astraight horizontal highway, the stoppingdistance Ds is the sum of two terms whichboth depend on speed V (in ms�1): thedistance driven during RT t, and the brakingdistance on a pavement with a coefficient offriction F:
Ds ¼ VtþV2
2gFð4Þ
with g¼ 9.81m s�2. Typical values for the RTfor drivers are around 2 seconds. This is muchhigher than the RTs measured in the
experiment (less than 0.5 second), becausedrivers are normally unaware that they willneed to brake to avoid a collision, whereas theparticipants in the experiment were expectingthe targets. Moreover, the action of steppingon the brake pedal is physiologically a littleslower than the action of pressing a button.Table 4 shows the stopping distance for a carrunning at 90 km/h, assuming a RT of 2 sec-onds and a coefficient of friction rangingfrom 0.3 (wet pavement) to 0.8 (dry concretepavement).
Previous studies about the VL have dis-cussed the threshold needed to get a fairtarget detection performance,1,13,30,31 how-ever, recommendations do not propose prac-tical implementations5 or do not use VLthresholds proposed in the scientific litera-ture.6 The data collected in this study suggestsome design rules for lighting systems, at leastfor automotive lighting, based on a ‘safevisibility distance’. Consider a driving sce-nario – for example, a pedestrian on ahighway where the speed limit is 90 km/h.A safe stopping distance can be computed(e.g. with Equation (4)) which would set athreshold detection distance (e.g. the brakingdistance plus 1 second at the regulatory
Table 3 Comparison between detection distance measured in a driving simulator (Experimental Detection Distance,EDD), and detection distance predicted from VL using Adrian model with a field factor of 7 (Computed DetectionDistance, CDD)
Reference Road sign(uniform)
Road sign Pedestrian(uniform)
Pedestrian Car(uniform)
Car
EDD 106 120 100 128 124 149 122CDD 115 131 112 129 124 146 126Deviation 8% 9% 12% 1% 0% �2% 3%
Table 4 Stopping distance Ds for various values of the pavement coefficient of friction F, at 90 km/h, with a 2 secondreaction time
Coefficient of friction, F 0.3 0.4 0.5 0.6 0.7 0.8
Stopping distance, DS (m) 156 130 114 103 96 90
86 R Bremond et al.
Lighting Res. Technol. 2013; 45: 76–89

speed). Then, the VL of the reference target (apedestrian in the current example) could becomputed as a function of the headlampillumination, using the Adrian model and therelative visibility (RV) ratio in Table 2. Basedon previous studies about the relevant VLthreshold, the lighting system could then betuned so as to produce this threshold VLvalue, for example, VL¼ 7 in the AssociationFrancaise de l’Eclairage recommendations.5
Note that this implies some knowledge aboutthe vehicle performance and road surfacecharacteristics to compute the stopping dis-tance. If a local map of the infrastructurecharacteristics is available,32 better estimatescan be expected.
5. Conclusion
This study, conducted in controlled condi-tions on a driving simulator, suggests that theAdrian VL provides a fair description of avisual performance which is related to a safetyindex (the target detection distance). Theresults also suggest that the detection perfor-mance with the usual reference target (a smalluniform square) is quantitatively related tothe detection distance with more naturaltargets. Thus, the VL framework is of greatinterest for assessing headlight performance.
As expected, the VL of a target at themoment of detection depends on the nature ofthe target (either a reference square, or alarger target, with a semantic value) and on itstexture. It would be interesting to test whethertargets with equal mean reflectance andvarious texture patterns would produce thesame VL and detection distance. However,the range of RV ratio, for the tested items, israther limited (from 95% to 141%, seeTable 2), and might be dealt with as atarget-dependent correction factor.
Setting the VL threshold at the moment oftarget detection to VL¼ 7 (based on the roadlighting literature) led to a rather good fit tothe data in an automotive lighting scenario.
However, for design applications, this thresh-old value is only relevant for a very simpledriving task, such as the one which wassimulated in the experiment (rural environ-ment without traffic). Field factor values formore complex situations deserve further study.
These results extend previous findingsabout visibility indices in road lighting andautomotive lighting design, by tackling targetvisibility in dynamic conditions. In addition,we introduce a detection distance index basedon the stopping distance, which allows settingthe required visual performance in relation toroad (e.g. friction) and vehicle parameters(e.g. speed). Such an index can be related toaccident probability and severity,11 whichprovides a practical solution for introducingrisk analysis into lighting design.
The present study is limited to automotivelighting, and the results cannot be extended toroad lighting design directly. The relevance ofthe VL as a predictor of the detection distancein road lighting conditions was tackled inearlier work,17 but the data did not allow adefinitive conclusion on that particular aspect,and calls for more investigations. It will also beinteresting to compare the object-orientedapproach (such as the VL approach describedin this paper) to an edge-oriented approachbased on image processing20 which makes nohypothesis about the target size or uniformity.
Funding
This work was partially supported by theSAGILLIS FUI project.
Acknowledgement
We wish to thank Vincent Ledoux and EnochSaint-Jacques who carried out the photomet-ric measurements, and Pierre Charbonnier forhelpful advice about the stopping distancecomputation.
Target visibility level and detection distance on a driving simulator 87
Lighting Res. Technol. 2013; 45: 76–89

References
1 Adrian W. Visibility levels under night-timedriving conditions. Journal of the IlluminatingEngineering Society 1987; 16: 3–12.
2 Adrian W. Visibility of targets: model forcalculation. Lighting Research and Technology1989; 21: 181–188.
3 Blackwell HR. Contrast thresholds of thehuman eye. Journal of the Optical Society ofAmerica 1946; 36: 624–643.
4 Commission Internationale de l’Eclairage. AnAnalytic Model for Describing the Influence ofLighting Parameters upon Visual Performance.CIE publication 19/2. Vienna: CIE, 1981.
5 Association Francaise de l’Eclairage.Recommendations Relatives a l’Eclairage desVoies Publiques. Lux editions, 2002.
6 Illuminating Engineering Society of NorthAmerica. American National Standard Practicefor Roadway Lighting, RP-8-00. New York:IESNA, 2000.
7 Olson P, Aoki T, Battle D, Flannagan M.Development of a Headlight SystemPerformance Evaluation Tool. Ann Arbor, MI:The University of Michigan TransportationResearch Institute, 1990.
8 Ising K, Fricker T, Lawrence J, Siegmund G.Threshold visibility levels for the Adrian visibilitymodel under night-time driving conditions:Proceedings of the Society of AutomotiveEngineers World Congress,Detroit, USA, 2003.Paper no. 2003-01-0294. DOI: 10.4271/2003-01-0294.
9 Ising K. Threshold visibility levels required fornight-time pedestrian detection in a modifiedAdrian/CIE visibility model. Journal of theIlluminating Engineering Society of NorthAmerica 2008; 5: 63–75.
10 Ising K, Green M. The distribution of visibilitylevels at target detection in a modified Adrian/CIE visibility model: Proceedings of the HumanFactors and Ergonomic Society AnnualMeeting, San Antonio, Texas. October 2009,1796–1800.
11 Gallen R, Hautiere N, Glaser S. Advisory speedfor intelligent speed adaptation in adverse con-ditions: Proceedings of the IEEE IntelligentVehicles Symposium, San Diego, CA, June2010, 107–114.
12 ReaMS.Towardamodel of visual performance:foundations anddata. Journal of the IlluminatingEngineering Society 1986; 15: 41–57.
13 Lecocq J. Calculation of the visibility level ofspherical targets in roads. Lighting Researchand Technology 1999; 31: 171–175.
14 Bremond R, Dumont E, Ledoux V, Mayeur A.Photometric measurements for visibility levelcomputations. Lighting Research andTechnology 2011; 43: 119–128.
15 Mayeur A, Bremond R, Bastien C. The effectof task and eccentricity of the target ondetection thresholds in mesopic vision.Implications for road lighting. Human Factors2008; 50: 712–721.
16 Mayeur A, Bremond R, Bastien C. Effectsof the viewing context on peripheral targetdetection. Implications for road lightingdesign. Applied Ergonomics 2010; 41:461–468.
17 Mayeur A, Bremond R, Bastien C. The effectof the driving activity on target detection as afunction of the visibility level. TransportationResearch Part F: Traffic Psychology andBehaviour 2010; 13: 115–128.
18 Bremond R, Mayeur A. Some drawbacks of thevisibility level as an index of visual performancewhile driving: Proceedings of the 27th Session ofthe CIE, Sun City, South Africa, Vienna: CIE,2011, 1140–1143.
19 Hautiere N, Dumont E. Assessment of visibilityin complex road scenes using digital imaging:Proceedings of the 26th Session of the CIE,Beijing, China, VIenna: CIE, July 2007, D496–99.
20 Joulan K, Hautiere N, Bremond R. Contrastsensitivity functions for road visibility estimationon digital images: Proceedings of the 27thSession of the CIE, Sun City, South Africa,Vienna: CIE, 2011, 1144–1149.
21 Joulan K, Hautiere N, Bremond R. A unifiedframework for edge detection and edge visibility:Proceedings of the CVPR Workshop onBiologically-Consistent Vision, ColoradoSprings, CO: CVPR, 2011, 21–26. DOI:10.1109/CVPRW.2011.5981679.
22 Rea MS, Bullough JD, Zhou Y. A method forassessing the visibility benefits of roadwaylighting. Lighting Research and Technology2010; 42: 215–241.
88 R Bremond et al.
Lighting Res. Technol. 2013; 45: 76–89

23 Rosey F, Auberlet J-M, Bertrand J,Plainchault P. Impact of perceptual treatmentson lateral control during driving on crestvertical curves: a driving simulator study.Accident Analysis and Prevention 2008; 40:1513–1523.
24 Tornos J. Driving behaviour in a real and asimulated road tunnel – a validation study.Accident Analysis and Prevention 1998; 30:497–503.
25 Bullough JD, Rea MS. Simulated drivingperformance and peripheral detection atmesopic and low photopic light levels. LightingResearch and Technology 2000; 32: 194–198.
26 Bella F. Driving simulator for speed researchon two-lane rural roads. Accident Analysis andPrevention 2008; 40: 1078–1087.
27 Moon P, Spencer DE. The visual effect of non-uniform surrounds. Journal of the OpticalSociety of America 1945; 35: 233–247.
28 Lecocq J. Visibility level in outdoor lighting.Adrian model applied to spherical cap targets:Proceedings of the 22th Session of the CIE,Melbourne, Australia, Vienna: CIE, 1991,48–51.
29 Roper VJ, Howard EA. Seeing with motor carheadlamps. Transactions of the IlluminatingEngineering Society 1938; 30: 417–438.
30 Bacelar A, Cariou J, Hammard M.Calculational visibility model for road lightinginstallations. Lighting Research andTechnology 1999; 31: 177–180.
31 Paulmier G, Brusque C, Carta V, Nguyen V.The influence of visual complexity on thedetection of targets investigated by computergenerated images. Lighting Research andTechnology 2001; 33: 197–205.
32 Bartels C. SAFESPOT local dynamic maps –virtual world for safety applications:Proceedings ITS World Congress. Beijing,China. October 2007.
Target visibility level and detection distance on a driving simulator 89
Lighting Res. Technol. 2013; 45: 76–89