-
8/9/2019 Task a Report
1/9
PICK AND PLACE ROBOTTASK A
Group Members:
Mohammad Johirul Islam
(245185)
Samuel Olaiya Afolaranmi
(245179)
-
8/9/2019 Task a Report
2/9
TASK A: PICK AND PLACE ROBOT
1
Table of Contents
Introduction..............................................................................................................................................................................
2
Components
Used..................................................................................................................................................................
2
Building the
Model.................................................................................................................................................................
3
Program
Algorithm:...............................................................................................................................................................
5
Flow
Chart................................................................................................................................................................................
6
Full System
PICs......................................................................................................................................................................
6
System Running
(Video).......................................................................................................................................................
8
Challenges
Faced....................................................................................................................................................................
8
Remedy
.....................................................................................................................................................................................
8
Limitations of the Systemand Further
Recommendations:........................................................................................
8
FiguresFig 1: Robot ARM .3
Fig 2: Gear assembly .3
Fig 3: Input buffer .4
Fig 4: Output Buffer .4
-
8/9/2019 Task a Report
3/9
TASK A: PICK AND PLACE ROBOT
2
IntroductionPick and Place is a very common function in Robotics
industries. In industries many robots are used
in different work cells to pick up the objects from the
production line and place it to buffer zone or
deliver it to packaging area.
This Pick up and Placing has been done by Robot Arms. There are
also different type of manipulator
to hold the objects. There is one motor require to pick up and
placing and one required for
transportation. The sorting in the output buffer can be done
depending on size, color. We have sorted
here depending on color (2 color)
Components UsedItem Name Type Port Used Quantity Description
1 Lego
NXT Motor
Servo
OUTPUT
A
&
C
2 This motor is specific to the NXT set.
Includes a rotation encoder, returning
to the NXT the position of the shaft
with 1 resolution.
2 Light Sensor INPUT 2 1 The Light Sensor reads the light
intensity of an object to distinguish
values of the light and dark, shades of
gray.
3 Lego
Touch Sensor
INPUT 1 1 The touch sensor detects when an
object touches the endpoint of the
sensor, or when the sensor is released
again.
4 Lego
Programming
Brick
CONTRO
LLER
N/A 1 Real brain of your robot, the NXT
brick centralizes information from the
sensors, calculates and issues
commands to actuators.
5 4X2 bricks Objects N/A 4 Two of blue color and two of
Yellow
color.
6 Lego Blocks Building
Blocks
N/A Many These has been used to build the
model
-
8/9/2019 Task a Report
4/9
TASK A: PICK AND PLACE ROBOT
3
Building the Model
The first step of the project is to design the model and
building it.
We had to build One Pick and Place Robot, One Input Buffer and
Two Output buffers.
We followed the design of the sample PnP Robot model given as
sample for this project.
We used Lego Digital Designer to analyze the design of the
sample.
Fig 1: Robot ARM
We went to Building guide mode to follow building step by step
as it was the first time for us
with these lego.
Here we assigned the lower servo as Motor A and the upper one as
Motor B
Motor A is responsible for the rotational motion of the arm. We
can also call it the translationmotion from one place to
another.
Motor B is responsible for the vertical movement of the arm to
pick au and placing the blocks.
Later we developed one input buffer and two output buffers.
One of the important consideration of building the robot is
Motor A carries all the loads of
the arm and to have a steady motion a bigger gear is introduced
as driven gear. This gives
lower speed of the arm but higher torque for the Motor A.
Fig 2: Gear assembly
-
8/9/2019 Task a Report
5/9
TASK A: PICK AND PLACE ROBOT
4
The light sensor has been placed with the input buffer in such a
way that it can sense the light
reflection value on the way of ascendance of the arm.
Fig 3: Input buffer
Two output buffers are built in basic ways. But important
consideration of these buffers is
their front legs. They are needed to design in such a way that
it does not make any obstacle
for the Robot arm.
Fig 4: Output Buffer
-
8/9/2019 Task a Report
6/9
TASK A: PICK AND PLACE ROBOT
5
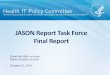
Program Algorithm:The programming part has been done in LEGO
MINDSTORM NXT 2.0
Motor A moves 0.5 clockwise rotation and this lead the Robot Arm
under the input Buffer.
Then Motor C makes a 54 degree of rotation which creates a
vertical motion of the arm.
This 54 degree motion make the arm reach near the light
sensor.
The sensor differentiate the color depending on reflection
intensity.
If the intensity is less than 40% than the block will be
consider as blue.
Else the block will be consider as yellow.
For the Blue Block the Motor A will give 1 full clockwise
rotation to achieve the position of
the arm tip over the Blue output buffer.
Then Motor C will descend gradually 94 degree so that it can
easily place the block over the
output buffer and arm reaches to its vertical initial
position.
To get to its horizontal initial position, Motor A give 1.5
anticlockwise rotation.
For the Yellow Block the Motor A will give 2 full clockwise
rotation to achieve the position
of the arm tip over the Yellow output buffer.
Then Motor C will descend gradually 94 degree so that it can
easily place the block over the
output buffer and arm reaches to its vertical initial
position.
To get to its horizontal initial position, Motor A give 2.5
anticlockwise rotation.
The whole process is in an infinite loop for continuous
operation.
The touch sensor is used as emergency stop.
-
8/9/2019 Task a Report
7/9
TASK A: PICK AND PLACE ROBOT
6
Flow Chart
-
8/9/2019 Task a Report
8/9
TASK A: PICK AND PLACE ROBOT
7
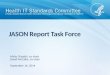
Full System PICs
Fig: Robot in Initial Position
Fig: After Completion of a Full Cycle.
-
8/9/2019 Task a Report
9/9
TASK A: PICK AND PLACE ROBOT
8
System Running (Video)http://youtu.be/Ko5O8hePU4w
Challenges Faced
Firstly, we faced a challenge of getting familiarize with the
commands and user interface of
the NXT 2.0
While building the model, we have found that there was many
blocks missing, which actually
forced us to improvise alternative designs with available lego
blocks.
Finally a great challenge we have faced on the demonstration day
that the Robot and the input
buffer and the output buffers are not be able to fixed in its
own position due to lack of base
lego brick.
We have to identify the input buffer and the output buffers each
time we change the position
of the robot. And it was really very hard as there is no scaling
system about the positions of
the buffers.
Remedy
We used the some NXT tutorials and help files to familiarize
with the NXT interface and the
commands.
We tried to find the missing blocks that we need in the lab, if
not found the design need to be
modified.
To restrict the slipping of the robot and the buffers we used
some adhesive tapes so that they
can be fixed to their positions.
Limitations of the System and Further Recommendations:
The light sensor can detect depending on the reflection
intensity. So it cannot detect more than
two color. Using color sensor can solve the problem.
In our system there was no sensor to detect the condition of the
input buffer as if it is emptyor full. An ultrasonic sensor can be
used to solve this issue.
The light sensor can be fixed with the Arm, then we would not
have to wait for sensing.
A conveyor in the output buffer can make the system more
live.
http://youtu.be/Ko5O8hePU4whttp://youtu.be/Ko5O8hePU4whttp://youtu.be/Ko5O8hePU4w