Embed Size (px)
Citation preview

Team P.A.C.K menEE 296 Project

Introduction to team P.A.C.K men
• Paul Linden – Systems specialist.
• Aaron Lake – Power specialist.
• Chris McLeod – Hardware and brute force realist.
• Kyle Tanabe – Logic and programming specialist.
• P.A.C.K. rat -our hard working mouse.

Goals
• Design and Build a robot capable of finding the center of a maze
• Have the mouse be able to return back to the center without looking for a new path.
SO FAR

Breakdown of project
Rabbit 2000 processor
Drive system
Sensory input
Input/Output logic
Maze solving
System power management

Drive system
• Motors: NEMA 17 stepper motors 9.6 VDC
1.8o step uni-polar
• Chassi: single piece of 1/8” aluminum custom fit to specifications.
• Wheels: custom aluminum alloy rims with rubber treads radius = 2.35cm


Sensory system
• 20 infrared sensors, 5 on each corner.
• Top down design.
• Symmetrically placed along board with enhanced peeking abilities.

Sensory Layout



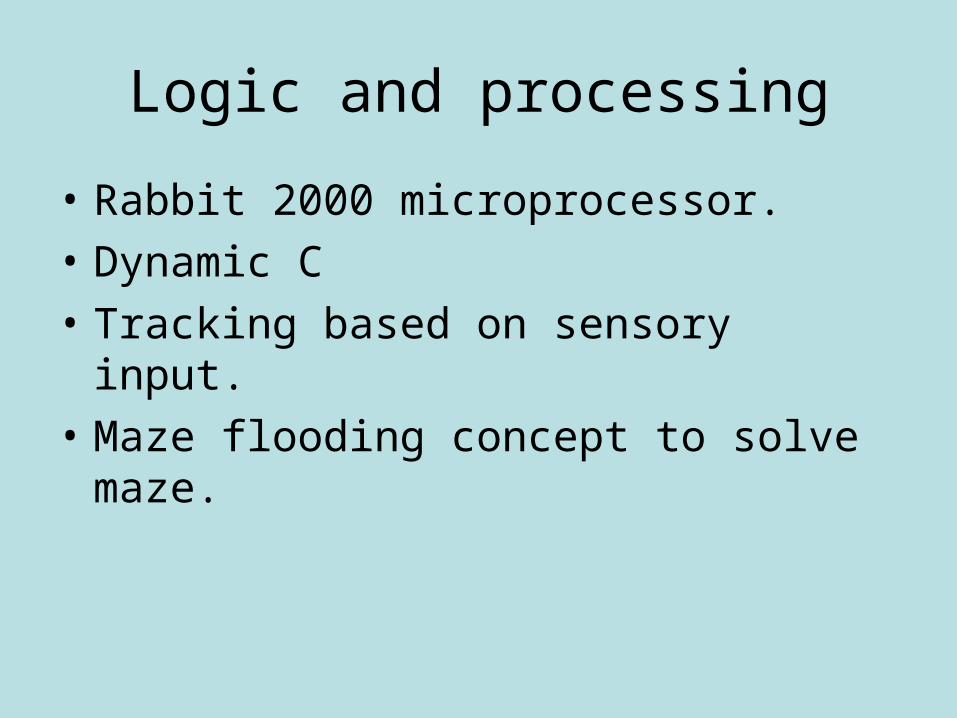
Logic and processing
• Rabbit 2000 microprocessor.
• Dynamic C
• Tracking based on sensory input.
• Maze flooding concept to solve maze.

7,7 7,6 7,5 7,4 7,3 7,2 7,1 7,0
6,7 6,6 6,5 6,4 6,3 6,2 6,1 6,0
5,7 5,6 5,5 5,4 5,3 5,2 5,1 5,0
4,7 4,6 4,5 4,4 4,3 4,2 4,1 4,0
3,7 3,6 3,5 3,4 3,3 3,2 3,1 3,0
2,7 2,6 2,5 2,4 2,3 2,2 2,1 2,0
1,7 1,6 1,5 1,4 1,3 1,2 1,1 1,0
0,7 0,6 0,5 0,4 0,3 0,2 0,1 0,0
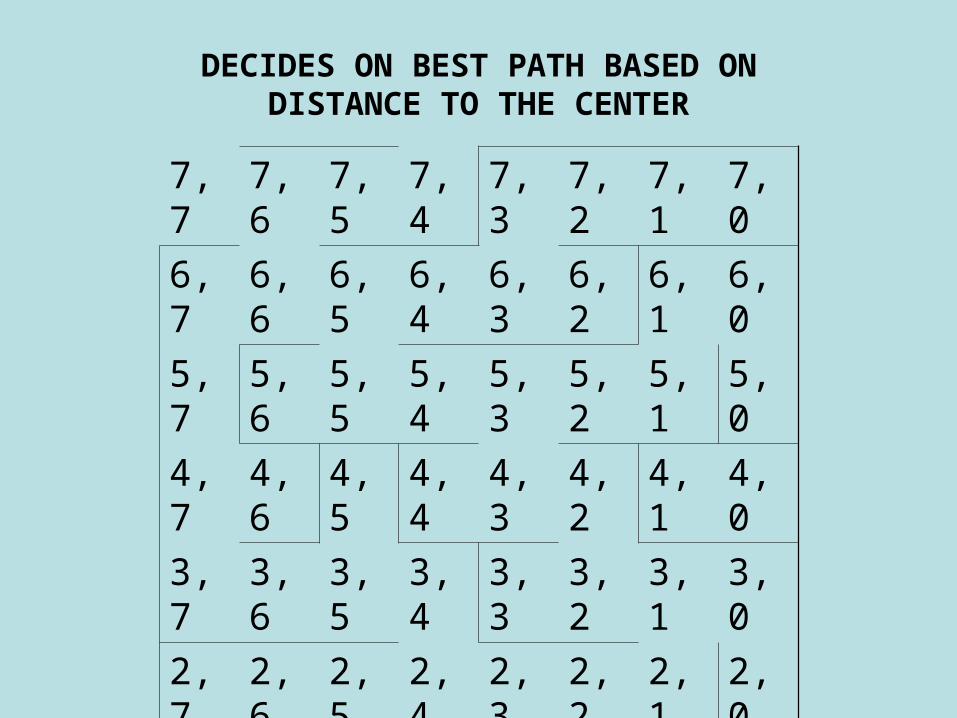
MAZE IS ARRANGED AS A NUMBERED GRID TO AID IN PROGRESS TRACKING
7,7 7,6 7,5 7,4 7,3 7,2 7,1 7,0
6,7 6,6 6,5 6,4 6,3 6,2 6,1 6,0
5,7 5,6 5,5 5,4 5,3 5,2 5,1 5,0
4,7 4,6 4,5 4,4 4,3 4,2 4,1 4,0
3,7 3,6 3,5 3,4 3,3 3,2 3,1 3,0
2,7 2,6 2,5 2,4 2,3 2,2 2,1 2,0
1,7 1,6 1,5 1,4 1,3 1,2 1,1 1,0
0,7 0,6 0,5 0,4 0,3 0,2 0,1 0,0
DECIDES ON BEST PATH BASED ON DISTANCE TO THE CENTER

7,7 7,6 7,5 7,4 7,3 7,2 7,1 7,0
6,7 6,6 6,5 6,4 6,3 6,2 6,1 6,0
5,7 5,6 5,5 5,4 5,3 5,2 5,1 5,0
4,7 4,6 4,5 4,4 4,3 4,2 4,1 4,0
3,7 3,6 3,5 3,4 3,3 3,2 3,1 3,0
2,7 2,6 2,5 2,4 2,3 2,2 2,1 2,0
1,7 1,6 1,5 1,4 1,3 1,2 1,1 1,0
0,7 0,6 0,5 0,4 0,3 0,2 0,1 0,0
REMEMBERS PATH IT HAS TAKEN

7,7 7,6 7,5 7,4 7,3 7,2 7,1 7,0
6,7 6,6 6,5 6,4 6,3 6,2 6,1 6,0
5,7 5,6 5,5 5,4 5,3 5,2 5,1 5,0
4,7 4,6 4,5 4,4 4,3 4,2 4,1 4,0
3,7 3,6 3,5 3,4 3,3 3,2 3,1 3,0
2,7 2,6 2,5 2,4 2,3 2,2 2,1 2,0
1,7 1,6 1,5 1,4 1,3 1,2 1,1 1,0
0,7 0,6 0,5 0,4 0,3 0,2 0,1 0,0
REMEMBERS BAD PATHS

7,7 7,6 7,5 7,4 7,3 7,2 7,1 7,0
6,7 6,6 6,5 6,4 6,3 6,2 6,1 6,0
5,7 5,6 5,5 5,4 5,3 5,2 5,1 5,0
4,7 4,6 4,5 4,4 4,3 4,2 4,1 4,0
3,7 3,6 3,5 3,4 3,3 3,2 3,1 3,0
2,7 2,6 2,5 2,4 2,3 2,2 2,1 2,0
1,7 1,6 1,5 1,4 1,3 1,2 1,1 1,0
0,7 0,6 0,5 0,4 0,3 0,2 0,1 0,0
REMEMBERS PATH BACK

Power management
• AA Duracell NiMH rechargable batteries.
• 2.05 A/hr, 1.2V
• Processor = 5V
• Motors = 9.6V
• Sensors = 5V
• 16 total batteries

Additional thoughts
• Potential problems:
design issues
logic problems
power issues
• What we will Learn: Teamwork
Engineering Applications
C C and more C

Any questions?

Tanks for coming out!











![StrategicContracting [Read-Only] - Naval Sea … Beckler Det. Contract Specialist Margaret Best WS Contract Admin Specialist Barbara Contreras Contract Specialist Vacant Contract Specialist](https://img.pdfslide.net/doc/110x75/5aeb47f87f8b9ab24d8e87f6/strategiccontracting-read-only-naval-sea-beckler-det-contract-specialist.jpg)

















