Embed Size (px)
Citation preview

EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 1
Model design of the climber
for the Space Elevator
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 1
-ALPHA-
Team:Aoki Bravo A
Speaker::S.Tanaka
Department of Precision machinery engineering, Graduate School of Nihon University
Team Aoki Bravo A
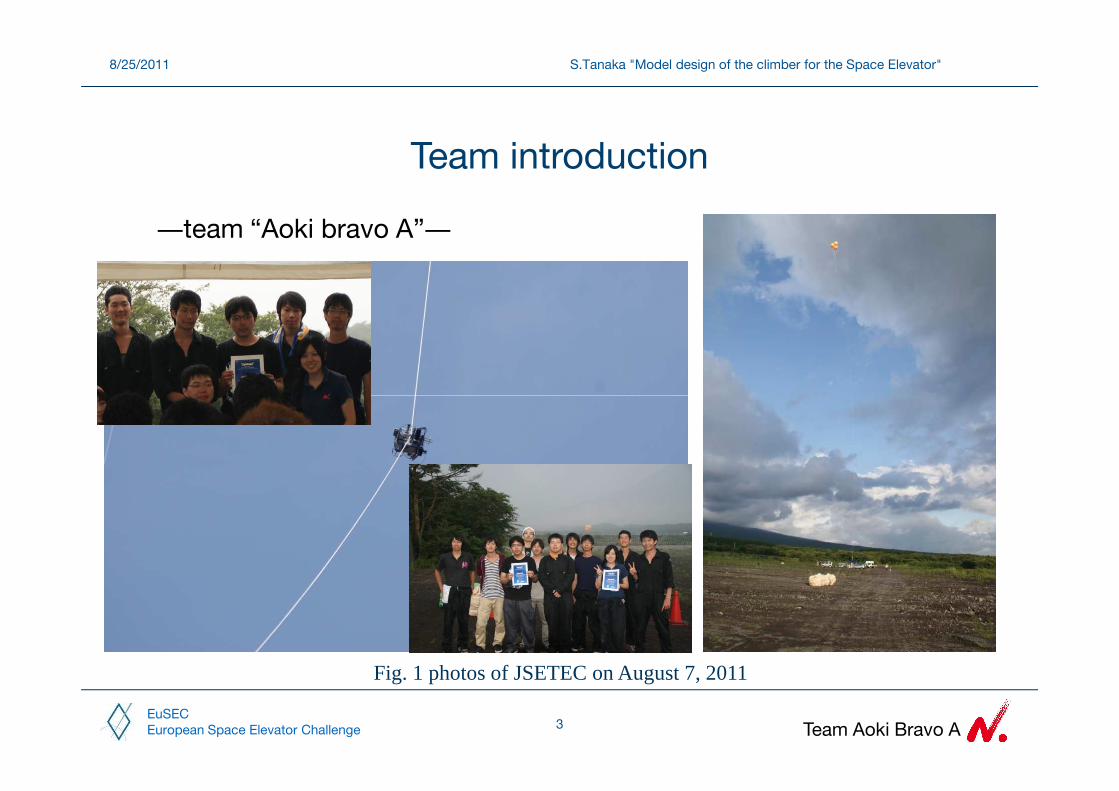
Team introduction
―team “Aoki bravo A”―
8/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 13
Fig. 1 photos of JSETEC on August 7, 2011
Team Aoki Bravo A
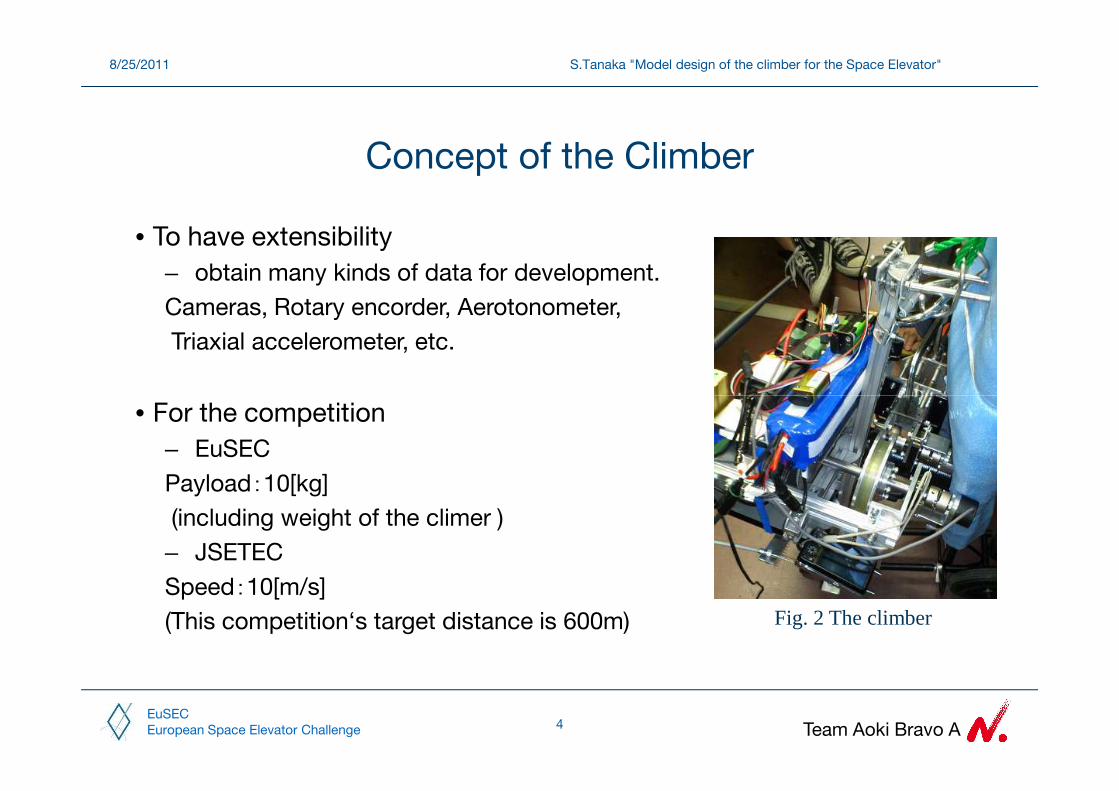
Concept of the Climber
• To have extensibility– obtain many kinds of data for development.
Cameras, Rotary encorder, Aerotonometer,
Triaxial accelerometer, etc.
8/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 1
• For the competition– EuSEC
Payload:10[kg]
(including weight of the climer )
– JSETEC
Speed:10[m/s]
(This competition‘s target distance is 600m)
4
Fig. 2 The climber
Team Aoki Bravo A
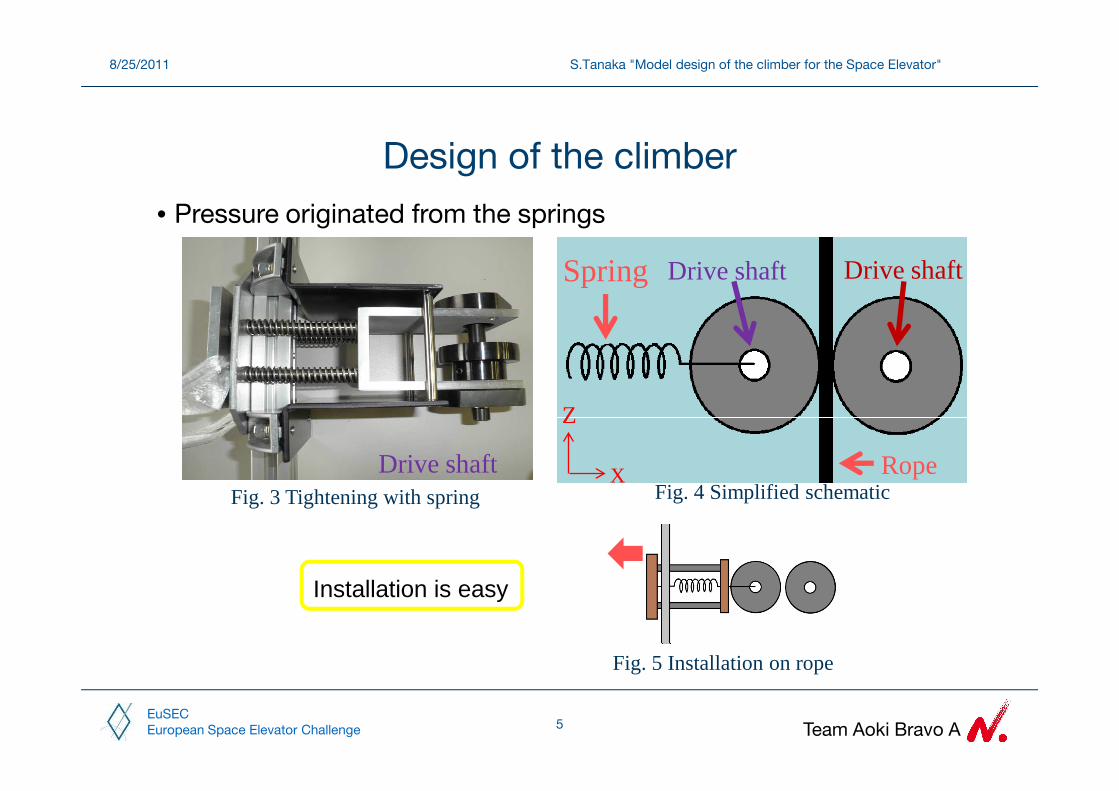
Design of the climber
• Pressure originated from the springs
8/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
Drive shaftDrive shaftSpring
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 15
Fig. 3 Tightening with spring
Drive shaftFig. 4 Simplified schematic
Rope
Z
X
Fig. 5 Installation on rope
Installation is easy
Team Aoki Bravo A
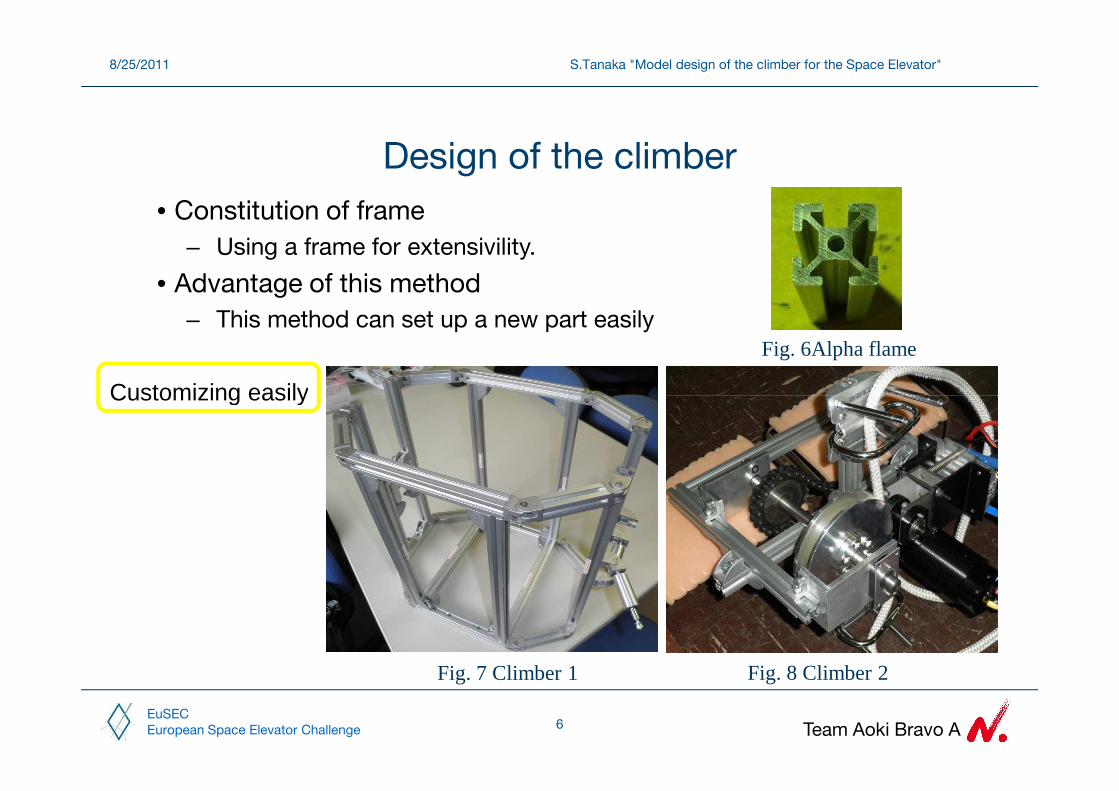
Design of the climber
• Constitution of frame– Using a frame for extensivility.
• Advantage of this method– This method can set up a new part easily
8/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
Fig. 6Alpha flame
Customizing easily
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 16
Fig. 7 Climber 1 Fig. 8 Climber 2
Customizing easily
Team Aoki Bravo A
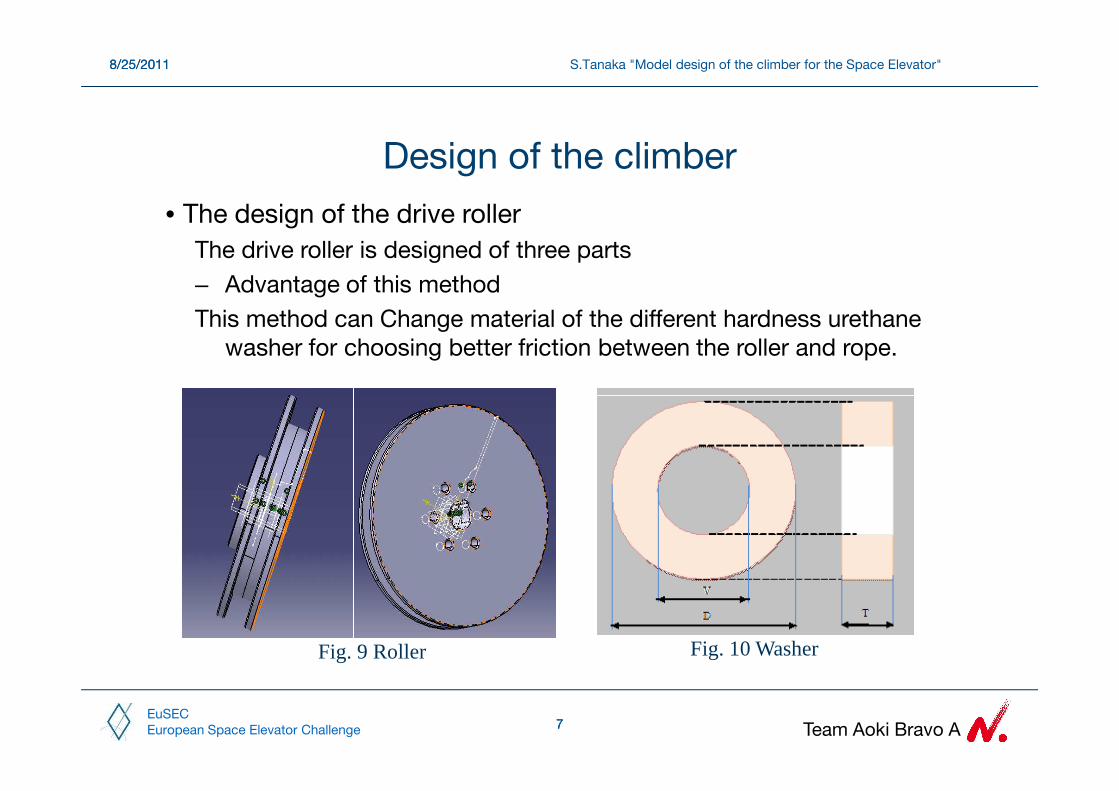
Design of the climber
• The design of the drive rollerThe drive roller is designed of three parts
– Advantage of this method
This method can Change material of the different hardness urethane
washer for choosing better friction between the roller and rope.
8/25/20118/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 17
Fig. 9 Roller Fig. 10 Washer
7 Team Aoki Bravo A
Sensors mounted on the climber
• Sensors - The climber was loaded with many sensors to fulfill the concept.
– Rotary encoder
-For checking the slipping between the roller and rope-
– CCD camera
-For observing the driven roller and rope-
8/25/20118/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 1
-For observing the driven roller and rope-
– Digital camera
- For observing the earth side
– Watt meter
– Angle sensor
– Triaxial accerometer
– Aerotonometer
8
Fig. 11 sensors
8 Team Aoki Bravo A
Specifications of the components
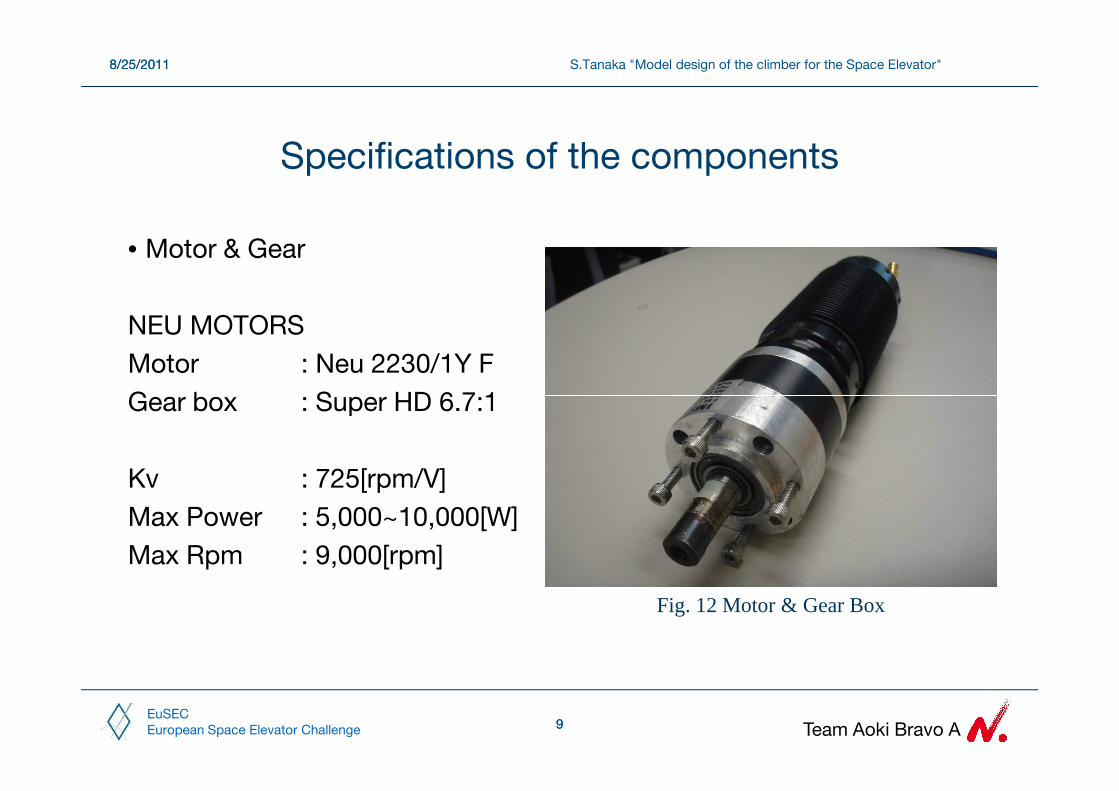
• Motor & Gear
NEU MOTORS
Motor : Neu 2230/1Y F
Gear box : Super HD 6.7:1
8/25/20118/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 1
Gear box : Super HD 6.7:1
Kv : 725[rpm/V]
Max Power : 5,000~10,000[W]
Max Rpm : 9,000[rpm]
9
Fig. 12 Motor & Gear Box
9 Team Aoki Bravo A
Specifications of the components
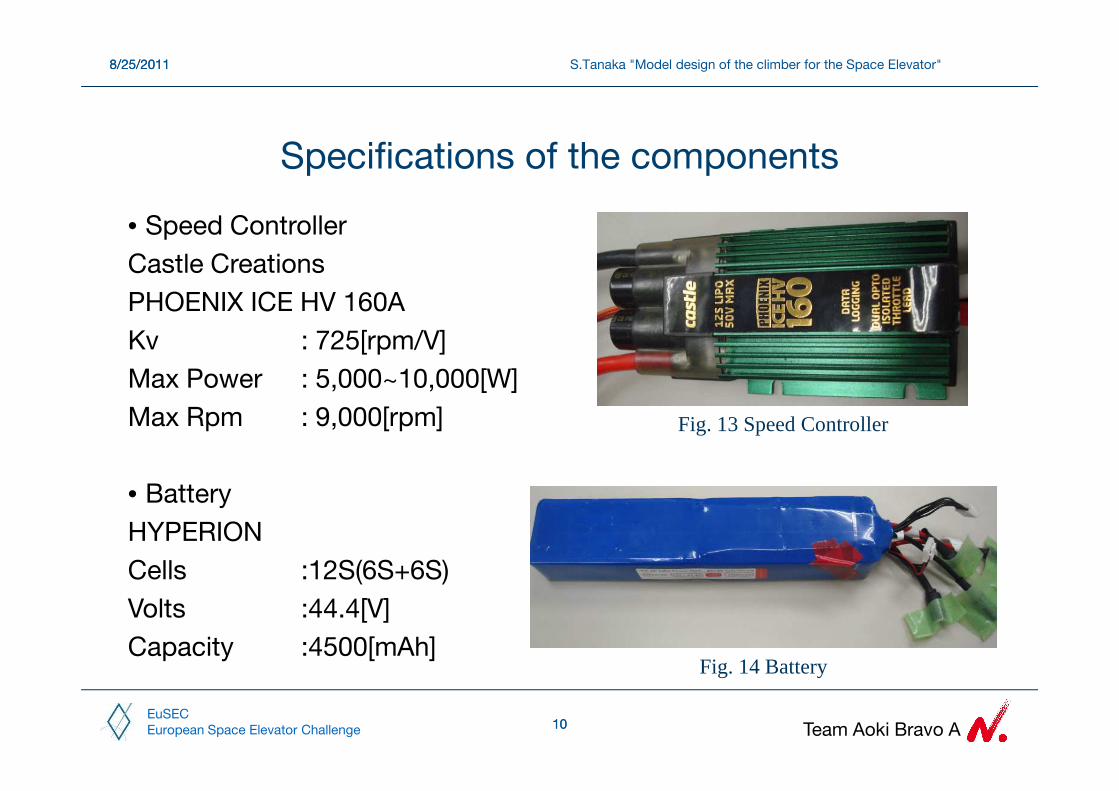
• Speed ControllerCastle Creations
PHOENIX ICE HV 160A
Kv : 725[rpm/V]
Max Power : 5,000~10,000[W]
8/25/20118/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 1
Max Rpm : 9,000[rpm]
• BatteryHYPERION
Cells :12S(6S+6S)
Volts :44.4[V]
Capacity :4500[mAh]
10
Fig. 13 Speed Controller
Fig. 14 Battery
10 Team Aoki Bravo A
Specifications of the components
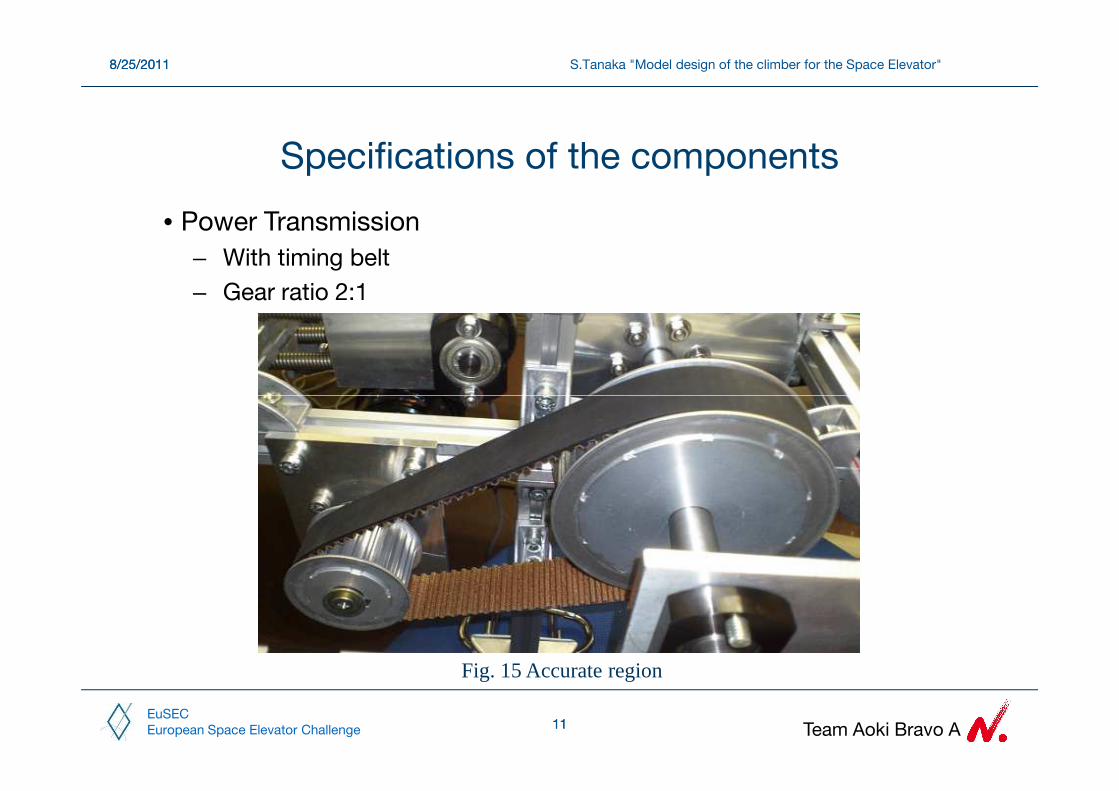
• Power Transmission– With timing belt
– Gear ratio 2:1
8/25/20118/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 111
Fig. 15 Accurate region
11 Team Aoki Bravo A
Safety
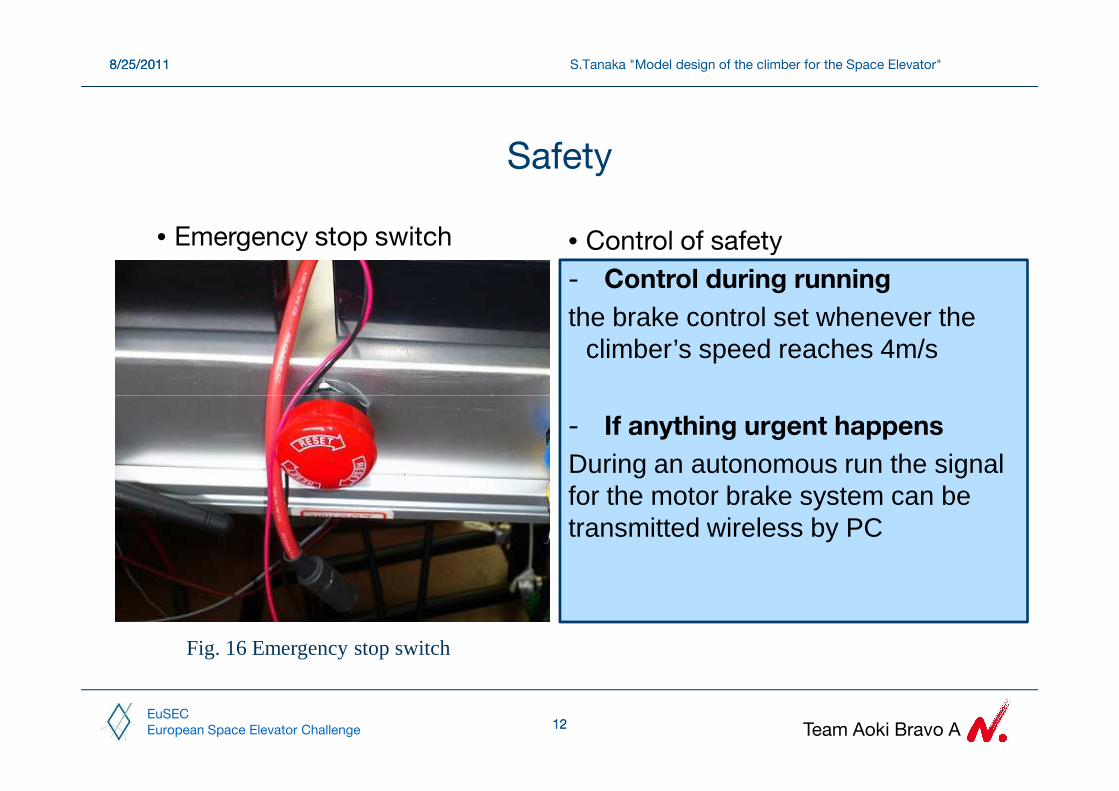
• Emergency stop switch
8/25/2011
• Control of safety- Control during running
the brake control set whenever the climber’s speed reaches 4m/s
8/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 112
Fig. 16 Emergency stop switch
- If anything urgent happens
During an autonomous run the signal for the motor brake system can be transmitted wireless by PC
12 Team Aoki Bravo A
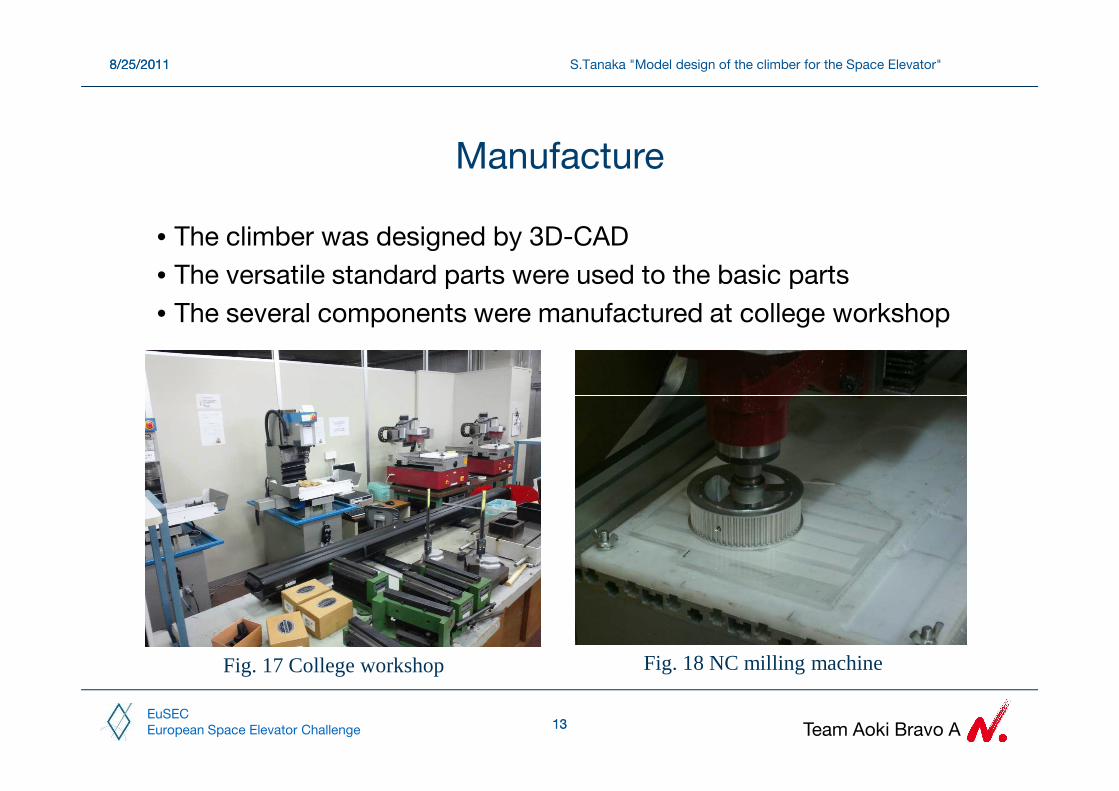
Manufacture
• The climber was designed by 3D-CAD• The versatile standard parts were used to the basic parts• The several components were manufactured at college workshop
8/25/20118/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 113
Fig. 17 College workshop Fig. 18 NC milling machine
13 Team Aoki Bravo A
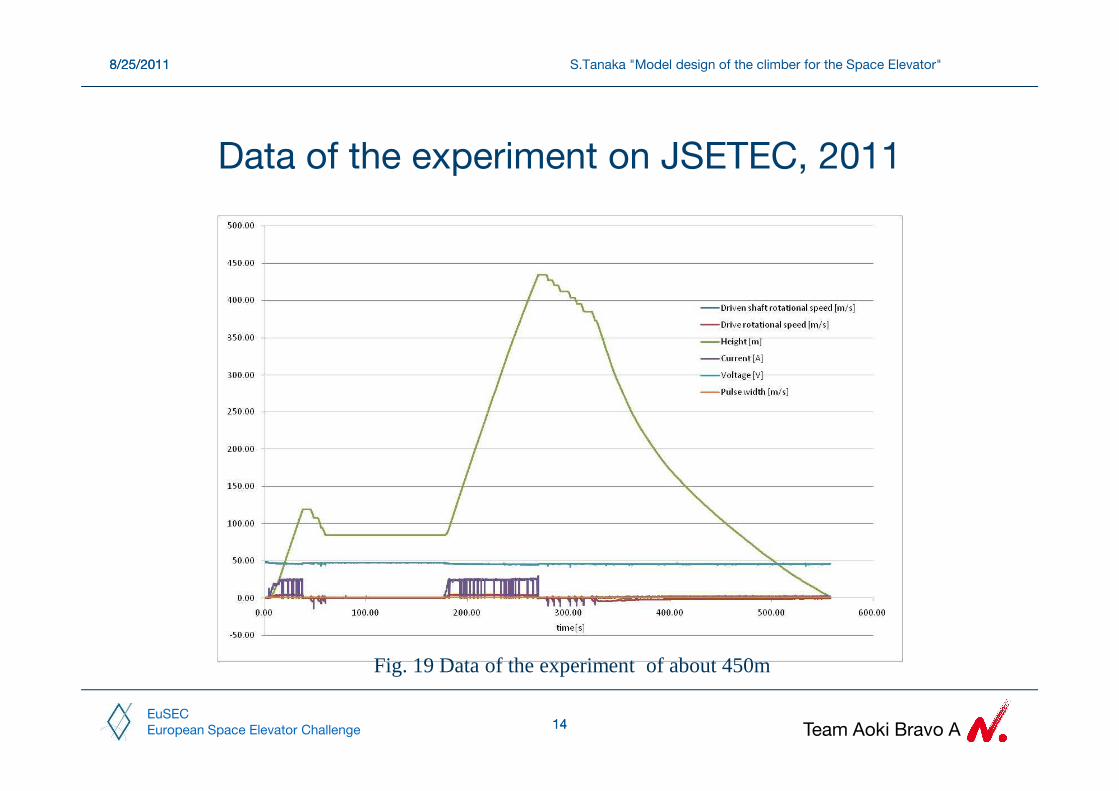
Data of the experiment on JSETEC, 2011
8/25/20118/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 114
Fig. 19 Data of the experiment of about 450m
14 Team Aoki Bravo A
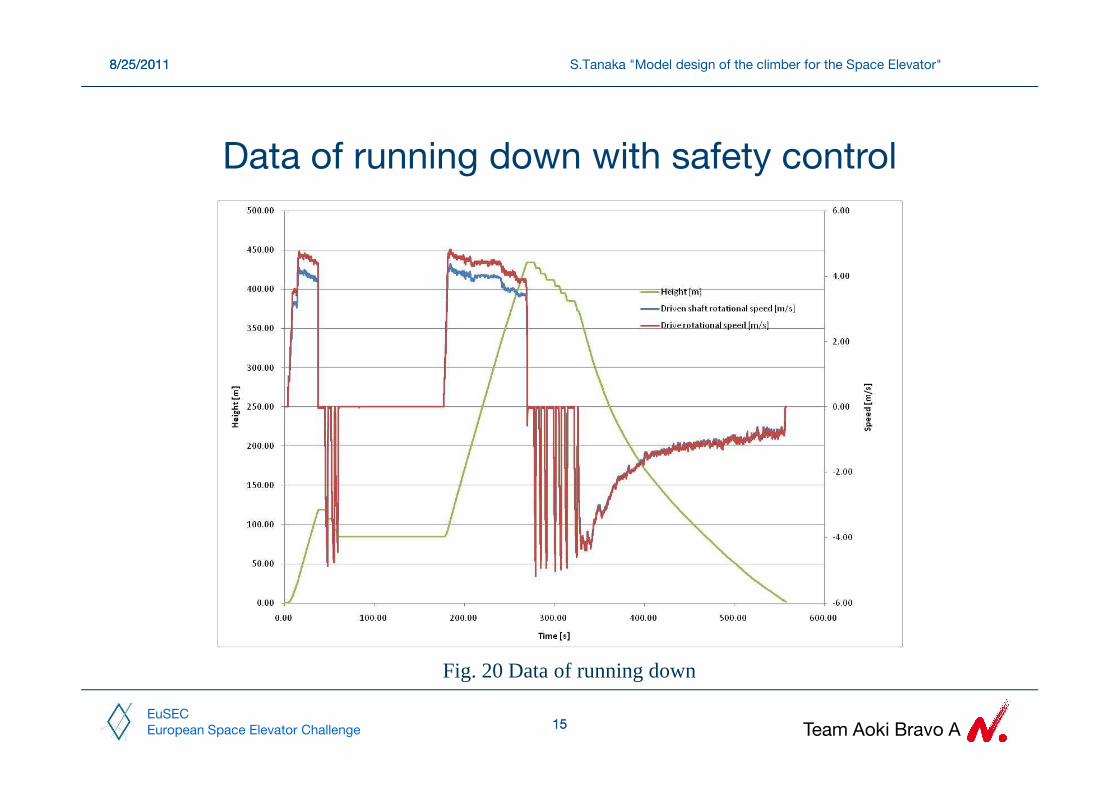
Data of running down with safety control
8/25/20118/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 115
Fig. 20 Data of running down
15 Team Aoki Bravo A
Achievements and Future works
• By changing materials of the urethane tire to hardness 30, 50, 70, 90. it was found the hardness 70 is the best.
• The length of the climber is better to be long for stability.• When the climber run down, the brake control which set whenever the climber’s speed reaches 4m/s is valid.
8/25/20118/25/2011 S.Tanaka "Model design of the climber for the Space Elevator"
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 1
• Add more sensors to the climber• Duplication of control unit for safety• Weight saving for mounting more payload
16
Future Works
16 Team Aoki Bravo A
Thank you for your
attention.
Contact information
EuSEC
European Space Elevator Challenge
Teamname & Logo
Edit via Slide-Master � Slide 1
Contact information• Postal Address
Aoki laboratory
7-24-1-#728, Narashinodai , Hunabashi-shi Chiba-ken
274-8501,JAPAN
Team Aoki Bravo A
• Team Member
S.Tanaka:E-mail: [email protected]
E.Hara
Y.Takezawa
A.Miyara