Embed Size (px)
Citation preview

Telexistence FSTによる高出力双腕ロボットの遠隔操作システムの開発
Development of Remote Operation System of High-Power Dual Arm RobotControlled by Telexistence FST
正○並木明夫(千葉大) 高明遠(千葉大) 松下左京(千葉大) 伊藤直樹(千葉大)
田中徹(旭光電機) 上田明寿(旭光電機) 村上慶典(旭光電機) 池田真也(旭光電機)和田貴志(旭光電機) 正 舘 暲(慶大)
Akio NAMIKI, Mingyuan GAO, Sakyo MATSUSHITA, Naoki ITO (Chiba Univ.),
Toru TANAKA, Akihisa UEDA, Yoshinori MURAKAMI, Shinya IKEDA,
Takashi WADA (Kyokko Electric Co.), Susumu TACHI (Keio Univ.)
In the paper, a new master-slave manipulation system is proposed. The system consists of the master system called
telexistence FST and a dual-hand-arm robot. The master system measures the pose of a operator by Flexible Sensor Tube
(FST) which consists of many bending joints and rotational joints. The weight of the system is light and its movable area is
large. Thus, good operability is achieved. The 3D image captured with the cameras of the slave robot is sent to the Head
Mount Display (HMD) of the master system. The structure of the slave robot is similar to the upper half of human bodies.
It has two 7-axis arms and two multi-fingered hands. Each multi-fingered hand has 5 fingers and 10 axes. Pressure sensors
and proximity sensors are set on the surfaces of the fingertips and the forearms. They improve the operability of the system.
All joint actuators are controlled through EtherCAT network in realtime. The slave robot sits on an electric wheelchair, and it
can move anywhere by pushing its lever. Finally, experimental results are shown, and the validity of the proposed algorithm
is verified.
Key Words: Telexistence, FST, Dual Arm, Multifingered Hand, Master-Slave Control
1. はじめに
マスタースレーブは操作者の動きに合わせてロボットを操作
する技術であり,従来より盛んに研究開発が行われている.ス
レーブロボットに無理なく器用な操作をさせるためには,操作
者にロボットの視覚や触覚などの情報を提示し,あたかも自身
の体のように感じさせることが必要となる.このような遠隔臨
場感をマスタースレーブと統合する技術はテレイグジスタン
ス [1]と呼ばれる.これまでに開発されてきたシステムの代表
的なものとして,舘らによる Telesar[2],NASAの robonaut[4]
などが挙げられる.
従来のマスタスレーブでは力感覚の提示を重視しており,操
作者が装着するマスタシステムに外骨格を模した多リンク機
構を用いるケースが多かった.これらではバイラテラル制御
による細かな作業が可能となるが,マスタのシステムが複雑
で装着しづらいものになり,実際の運用が困難になることが
あった.
これに対して,近年,Flexible Sensor Tube (FST)と呼ばれる
軽くフレキシブルな多リンク機構をマスタとして用いられる
ようになってきた.FSTは,大須賀らによって提案された角度
センサを備えた多リンク機構 [5]を旭光電機(株)で製品化し
たものであり,手先や足先などの人体の計測したい部位と体幹
部を FSTでつなぎ,各リンク間の角度から目標とする部位の
位置と姿勢を計算することができる.FSTの特徴は軽量かつ
フレキシブルなことであり,操作者にとって,軽快で素早い操
作が可能となり,可動範囲も広くなり,かつ装着もしやすいと
いう特徴を持つ.さらに近年では,テレイグジスタンスに対
応して視覚・力覚提示機能を付加することで Telexistence FST
と呼ばれる統合システムが開発されている.
FSTをマスタに用いた例として,大須賀らはレスキュー用の
ロボットを開発している [6].また,舘らは Telesar5[3]のマス
タに使用している.本システムでは実用的な作業への応用を目
指して,各軸に高出力ブラシレス DCモータを使用し,また,
各軸間の通信に EtherCATを使用することで,高出力高速特性
を持つ双腕5本指ロボットハンドを備えた上半身型のヒューマ
ノイドを開発した.本稿では,そのシステム構成と検証実験
の結果について報告する.
2. 開発システムの構成
図 1に全体構造を示す.操作者の全身(首,両腕,両手指,
両足)に装着された各 FSTにおいて,関節角度が計測され,そ
れらの情報は FSTコントローラに集められ,Ethernetによっ
てスレーブコントローラに送られる.
スレーブコントローラでは FSTの角度情報から操作者の動
きを計算し,それをスレーブロボットの目標関節角度に変換す
る.その情報は EtherCATにより,スレーブロボットの各軸の
制御ドライバに送られ,各軸ごとに位置制御が行われる.
一方,スレーブロボットのステレオビジョンによる視覚情
報,指先のタッチセンサによる触覚情報が操作者に送られる.
操作者はヘッドマウントディスプレイ (HMD)と,指先の力覚
提示装置によってそれらの感覚情報を得る.
さらに,スレーブロボットの手腕表面には近接覚センサア
レイが付いており,ロボットの安全を保持する自動制御のため
2P P04
2P P04(
N . 2 Pr d n f th 20 2 J nf r n n R b t nd h tr n , H t , J p n, 2 2 , 20 2

FST
Controller
Controller
xPC target
Host
Converter
Driver
Driver
Driver
HMD
Flexible
Sensor Glove
(FSG)
Gravity
Graber
Pressure
Sensor
Proximity
Sensor
Stereo vision
Microphone
Speaker
Flexible
Sensor Glove
(FSG)
Sensor
Control
Unit
Ethernet
EtherCAT
Hub
HD-SDIDVI
Flexible
Sensor Tube
(FST)
Fig. 1 System Configuration
に用いられる.また,スレーブロボットのヘッドにはマイクロ
フォンとスピーカがついており,HMDに備えられた操作者用
のスピーカ,マイクとそれぞれ接続され,他者と会話が可能
である.
スレーブコントローラのためのソフトウェアは,Mat-
lab/Simulinkを使用したビジュアルプログラミングによって
開発され,実行ファイルはMatlab/xPC Targetを利用してリア
ルタイムに実行される.今回の検証実験ではサイクルタイム
10msで実行した.
2.1 マスタシステム (Telexistence FST)
本研究で用いたマスタシステムの概観を図 2に示す.
2.1-1 Flexible Sensor Tube (FST) FSTは長さ 50mmのリ
ンクと関節で構成されており,隣り合った関節の軸は互いに直
交するよう交互に配置されている.そして,各関節にはその曲
げ角度を検出する曲げ角度センサ(ポテンショメータ)が内蔵
されている.また,これら関節の数個ごとにねじり角度セン
サを備えた回転関節も配置されている.FSTでは,各曲げ角
度センサとねじり角度センサの角度を高速に計測・通信・演算
しながら,任意の3次元位置・形状を示すように変形させて,
リアルタイムにその FSTチューブの関節の位置や方向,全体
の形状,およびそれらの動的変化を 3次元的に計測する事が
できる位置・形状センサとして利用する事が可能になる.
本システムでは,この FSTを両腕と両足にそれぞれ 1本ず
つの計 4本,頭部に 2本の総計 6本を用いる.腕用の FSTは
全長 1050mm,関節数23個,頭部用 FSTは全長 650mm,関
節数 14個である.脚部用 FSTは今回は使用していない.
2.1-2 Flexible Sensor Glove (FSG) FSG(Flexible Sensor
Glove)は操作者の手の形状を計測するための装置である.概
観を図 3(a)に示す.各指の背面に 2本または 3本のワイヤを装
着し,ワイヤの伸縮を直動ポテンショメータによって計測し,
関節角度に変換する.また,親指,人差し指と中指の指先に力
提示装置(グラビティグラバー [9])が装着されている.これ
は,締め付けによって力感覚を提示する装置であり,スレーブ
の把持感覚を提示するために用いる.
2.1-3 3次元視聴覚ヘッドマウントディスプレイ(HMD) 操
作者は頭部に3次元ヘッドマウントディスプレイを装着する.
概観を図 3(b)に示す.高速・高精細映像での映像提示が可能で
あり,高い臨場感が実現できる.また,ヘッドホンとマイクも
装着されており,スレーブロボットを通してコミュニケーショ
ンが可能となっている.
Fig. 2 Telexistence FST
(a) FSG (b) HMD
Fig. 3 Modules of Telexistence FST
2P P04(2
N . 2 Pr d n f th 20 2 J nf r n n R b t nd h tr n , H t , J p n, 2 2 , 20 2

Fig. 4 Slave robot
(a) Hand (b) Head
Fig. 5 Modules of slave robot
2.2 スレーブロボット
スレーブロボットは,図 4に示すように人間の上半身に類
似した双腕多指ロボットである.腰部 2自由度,頭部 3自由
度,アーム部は各 7自由度,ハンド部は各 10自由度をもつた
め,合計 39自由度である.図 4では作業用に衣類を着せてい
るが,外装については用途によって変更する仕様としている.
現状では,スレーブロボットは電動車椅子の座席上に搭載さ
れている.これは市販の電動車椅子であり,右横のレバーで前
後回転を操作できる.スレーブロボットと電動車椅子の間に電
気的な接続や情報通信のやり取りはなく,レバー操作のみに
よって物理的に操作される.これは,スレーブロボットの器用
さ,汎用性を評価するために,電動車椅子を人間のようにレ
バーで操作することを課題の一つとしたためである.
2.2-1 EtherCAT スレーブロボットの各軸はアクチュエータ
と制御ドライバ,通信基板が一体化されている.ただし,ハン
ド部の制御ドライバは前腕部に集められている.制御ドライバ
とスレーブコントローラの通信は,全て EtherCAT (Ethernet
for Control Automation Technology) に基づいて行われる.
EtherCATは Ethernetをベースとした高性能通信規格である.
ハードウェア層が通常の Ethernetと共通であり実装が容易で
あり,100Mbps Ethernetをベースとしているので高速である.
EtherCATのデータ転送は,全ノードを数珠つなぎにつないで
全ノードを通るようにデータフレームを流し,データフレーム
が通過した時に入出力の書き込みを行うのが基本である.通
常の Ethernetと違ってノード間の接続確立の手続きは必要な
いので,リアルタイム性が高い.
2.2-2 アーム アームは肩 3軸,肘 2軸,手首 2軸の計 7自
由度の冗長性を持ち.人間と良く似た構造とサイズである.最
大トルクは肩3軸が 82Nm, 54Nm, 28Nm,肘が 28Nmであり,
高いパワーを持つ.前腕部には,近赤外線反射方式の近接セ
ンサアレイが搭載されており,安全センサとして用いる.検出
距離は 300mm程度である.
2.2-3 多指ハンド ハンドの概観を図 5(a)に示す.小指と薬
指が 1自由度,中指と人差し指が 2自由度,親指が 4自由度
(旋回関節一つと曲げ関節三つ)で,合計で 10自由度である.
人間の手と同様の大きさ・形となるように設計されている.各
関節はワイヤを通して前腕部の直動アクチュエータにより駆
動する仕組みとなっている.また,親指先,薬指先と中指先に
圧力センサが付いており,マスタの力提示やスレーブの自動制
御のため用いられる.
2.2-4 ヘッド ヘッドの概観図を 5(b)に示す.首の関節は 3
自由度となっており,左右,上下,縦軸まわりに回転できる.
また,カメラ 2台,マイク 2個が搭載されており,ロボットが
見た画像と聞こえた音をマスタ側の HMD に送ることができ
る.スピーカーも付いており,HMDにあるマイクにより,操
縦者の声をロボットに出力させることができる.
3. 制御システム
3.1 ユニラテラル制御
本システムでは直接的な力覚提示を行うことが難しいので,
マスタによって生成された目標値にスレーブロボットが追従す
るように制御されるユニラテラル制御となる.
具体的には,マスタで計測された FSTの関節角度から人間
の手先の位置と姿勢を計算し,逆運動学演算によりスレーブ
ロボットの関節角度を計算する.現状では,制御ドライバが各
軸ごとに EtherCATを通して接続しているという特徴から,各
軸ごとに独立した PID位置制御系を組むようにしている.
3.2 逆運動学の数値解法
マスタの FSTは 23個のリンクからなり,スレーブロボット
とは全く異なる関節構造を持っている.また,FSTの可動範
囲は大きく,スレーブロボットの到達できない範囲まで大きく
動いてしまう.目標値がスレーブの可動範囲外になった場合に
ついては,スレーブロボットが到達できる最も近傍の位置姿勢
を取るのが望ましい.このようにすることで,可動範囲近傍
であっても,スレーブロボットの連続的な運動を実現しやすい
ためである.
2P P04(
N . 2 Pr d n f th 20 2 J nf r n n R b t nd h tr n , H t , J p n, 2 2 , 20 2
0[s] 2[s]
4[s] 6[s]
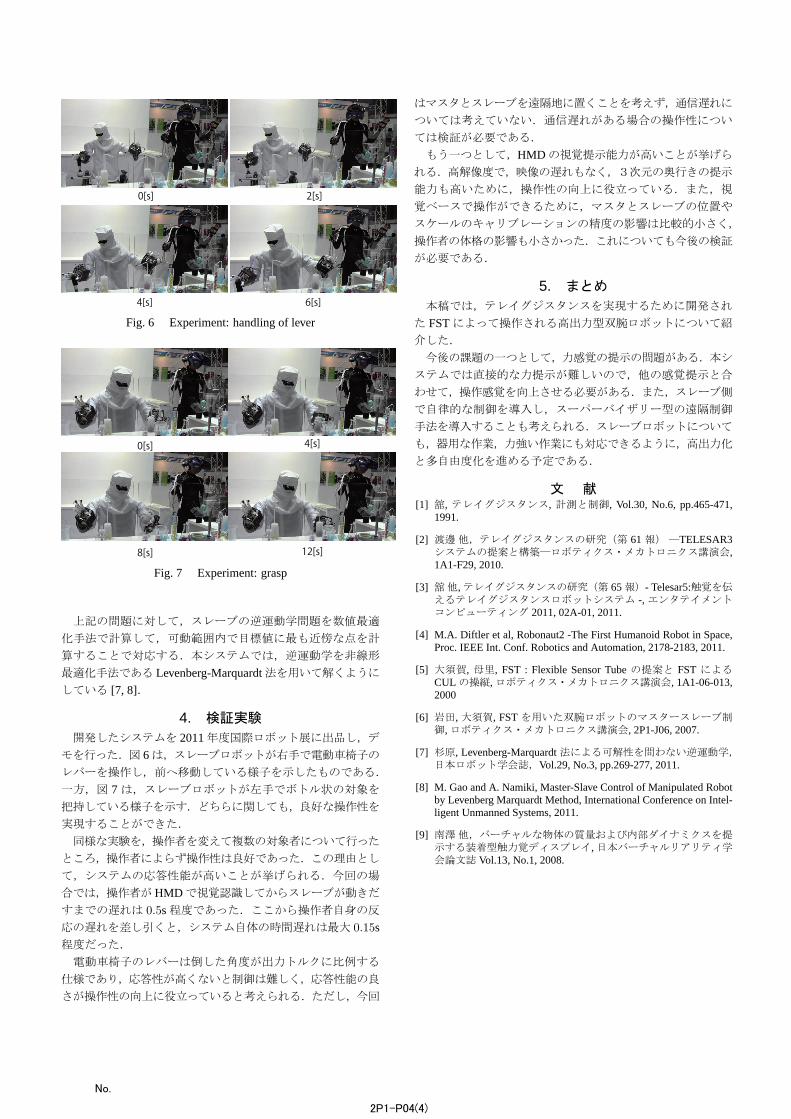
Fig. 6 Experiment: handling of lever
0[s] 4[s]
8[s] 12[s]
Fig. 7 Experiment: grasp
上記の問題に対して,スレーブの逆運動学問題を数値最適
化手法で計算して,可動範囲内で目標値に最も近傍な点を計
算することで対応する.本システムでは,逆運動学を非線形
最適化手法である Levenberg-Marquardt法を用いて解くように
している [7, 8].
4. 検証実験
開発したシステムを 2011年度国際ロボット展に出品し,デ
モを行った.図 6は,スレーブロボットが右手で電動車椅子の
レバーを操作し,前へ移動している様子を示したものである.
一方,図 7は,スレーブロボットが左手でボトル状の対象を
把持している様子を示す.どちらに関しても,良好な操作性を
実現することができた.
同様な実験を,操作者を変えて複数の対象者について行った
ところ,操作者によらず操作性は良好であった.この理由とし
て,システムの応答性能が高いことが挙げられる.今回の場
合では,操作者がHMDで視覚認識してからスレーブが動きだ
すまでの遅れは 0.5s程度であった.ここから操作者自身の反
応の遅れを差し引くと,システム自体の時間遅れは最大 0.15s
程度だった.
電動車椅子のレバーは倒した角度が出力トルクに比例する
仕様であり,応答性が高くないと制御は難しく,応答性能の良
さが操作性の向上に役立っていると考えられる.ただし,今回
はマスタとスレーブを遠隔地に置くことを考えず,通信遅れに
ついては考えていない.通信遅れがある場合の操作性につい
ては検証が必要である.
もう一つとして,HMDの視覚提示能力が高いことが挙げら
れる.高解像度で,映像の遅れもなく,3次元の奥行きの提示
能力も高いために,操作性の向上に役立っている.また,視
覚ベースで操作ができるために,マスタとスレーブの位置や
スケールのキャリブレーションの精度の影響は比較的小さく,
操作者の体格の影響も小さかった.これについても今後の検証
が必要である.
5. まとめ
本稿では,テレイグジスタンスを実現するために開発され
た FSTによって操作される高出力型双腕ロボットについて紹
介した.
今後の課題の一つとして,力感覚の提示の問題がある.本シ
ステムでは直接的な力提示が難しいので,他の感覚提示と合
わせて,操作感覚を向上させる必要がある.また,スレーブ側
で自律的な制御を導入し,スーパーバイザリー型の遠隔制御
手法を導入することも考えられる.スレーブロボットについて
も,器用な作業,力強い作業にも対応できるように,高出力化
と多自由度化を進める予定である.
文 献[1] 舘, テレイグジスタンス, 計測と制御, Vol.30, No.6, pp.465-471,
1991.
[2] 渡邊他,テレイグジスタンスの研究(第 61報)―TELESAR3システムの提案と構築―ロボティクス・メカトロニクス講演会,1A1-F29, 2010.
[3] 舘他,テレイグジスタンスの研究(第 65報)- Telesar5:触覚を伝えるテレイグジスタンスロボットシステム -,エンタテイメントコンピューティング 2011, 02A-01, 2011.
[4] M.A. Diftler et al, Robonaut2 -The First Humanoid Robot in Space,Proc. IEEE Int. Conf. Robotics and Automation, 2178-2183, 2011.
[5] 大須賀, 母里, FST : Flexible Sensor Tubeの提案と FSTによるCULの操縦,ロボティクス・メカトロニクス講演会, 1A1-06-013,2000
[6] 岩田,大須賀, FSTを用いた双腕ロボットのマスタースレーブ制御,ロボティクス・メカトロニクス講演会, 2P1-J06, 2007.
[7] 杉原, Levenberg-Marquardt法による可解性を問わない逆運動学,日本ロボット学会誌,Vol.29, No.3, pp.269-277, 2011.
[8] M. Gao and A. Namiki, Master-Slave Control of Manipulated Robotby Levenberg Marquardt Method, International Conference on Intel-ligent Unmanned Systems, 2011.
[9] 南澤他,バーチャルな物体の質量および内部ダイナミクスを提示する装着型触力覚ディスプレイ,日本バーチャルリアリティ学会論文誌 Vol.13, No.1, 2008.
2P P04(4
N . 2 Pr d n f th 20 2 J nf r n n R b t nd h tr n , H t , J p n, 2 2 , 20 2





























