Embed Size (px)
Citation preview
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
Quantifying Uncertainty in Plasma Temperature via Neutron Detection
Aaron Luttman, Ph.D. Senior Scientist
National Security Technologies, LLC
Joint work with Michal Odyniec, Eric Machorro, John Bardsley,
Heikki Haario, and others…
This work was done by National Security Technologies, LLC, under Contract No. DE-AC52-06NA25946 with the U.S. Department of Energy and supported by the Site-Directed Research and Development Program.
6 6.5 7 7.5 8 8.5 9
x 10−6
−20
0
20
40
60
80
100
DOE/NV/25946–1672
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
National Security Technologies, LLC (NSTec), is the Management &Operations Contractor to the U.S. Department of Energy for theNevada National Security Site.
We develop and field experi-mental diagnostics such as
I X-ray Radiography,I High Speed Cameras,I Photonic Doppler
Velocimetry,I VISAR, andI Radiation Detectors
http://www.nv.energy.gov/library/photos/atlas.aspx
We also develop methods foranalyzing and interpreting thedata from these diagnostics.
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
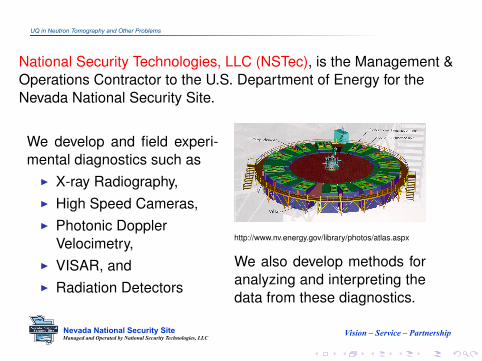
Primary Problem: Determine the tem-perature of a plasma in controlled fu-sion reactions.
What do we mean by controlled fu-sion?
Small amounts of Deuterium or Deu-terium and Tritium get compressed tothe point of fusing, emitting photonsand neutrons.
Dense Plasma Focus Schematic, compli-
ments of Tim Meehan.
Neutron Tomography
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
Neutron Detectors:
1. Neutron interacts withscintillator, which releases acharged particle,
2. which bounces around andreleases photons,
3. into a photomultiplier tube.4. Released photons hit the
photocathode,5. generating a flow of electrons.
Notes:I Neutrons are counted
regardless of energy.I Neutrons have mass, so
higher energy neutronsare faster than low energyneutrons.
I Scatter effects are difficultto distinguish from thedesired interactions.
∗∗ Detector signal as a function of detection time t′ and distance X is the integral of neutron flux over creation time t and
energy E , which is a line integral in creation time and inverse velocity coordinates.∗∗
Radiation Detectors
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
Given creation time t and energy E , the neutron profile can bemodeled as a Gaussian
f (q, t) =N
2πσqσtexp
(−(q − 1)2
2σ2q
− (t − t0)2
2σ2t
), (1)
whereI N - Total number of neutrons created in reaction,I q - Energy represented in inverse velocity coordinates,I σ2
q - variance of neutron inverse velocity profile, which isproportional to plasma temperature, which is what we really careabout, and
I σ2t - variance of neutron creation time profile.
Mathematical Formulation
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
The detector signal is thus the Radon transform of the distributionf (q, t),
(Rf )(X , t ′) =N
2πσqσt
∫R
∫R
e−(q−1)2
2σ2q e
−(t−t0)2
2σ2t δ(t − (t ′ − Xq))dt dq
=N
X 2√
2πσ2e−(t′−(X+t0))
2
2σ2 , (2)
where σ2 = σ2qX 2 + σ2
t , and we use a specialized coordinate systemthat makes the algebra a little easier.
Radon Transform
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
The optimization problem is to compute the model parameters σ2q, σ2
t ,and t0, by fitting the model
Sj(Xj , t ′) = κjNαjAj
4πX 2j
√2πσ2
e−(t′−(Xj+t0))
2
2σ2 (3)
to the data measured at detectors 1, . . . , J, whereI αj - sensitivity of the detector,I Aj - detection surface area,I κj - multiplicative factor for transforming particles to voltage (also
a model parameter, just not important),I σ2 = σ2
qX 2 + σ2t .
Optimization Problem
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
Notes and Primary Questions:
I The data are sparse in X but (fairly) dense in t ′. Usually have 3-8detectors.
I At least 2 detectors at different distances are necessary toresolve σ2
q and σ2t .
I The data from the detectors is often inconsistent with itself.
I What is the appropriate noise model? It should have Poisson andGaussian components, but the noise seems to vary significantly.
I Given the ambiguity in the noise model, what are appropriatesignal reconstruction techniques?
Parameter Estimation andUncertainty Quantification
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
0 200 400 600 800 1000 1200 1400 1600 1800 2000−5
0
5
10
15
20
25
30
35
40
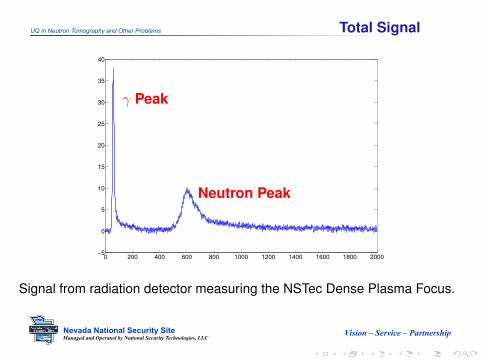
Signal from radiation detector measuring the NSTec Dense Plasma Focus.
Total Signal
γ Peak
Neutron Peak
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
0 500 1000 1500 2000 2500−20
0
20
40
60
80
100
Time (ns)
Vo
ltag
e
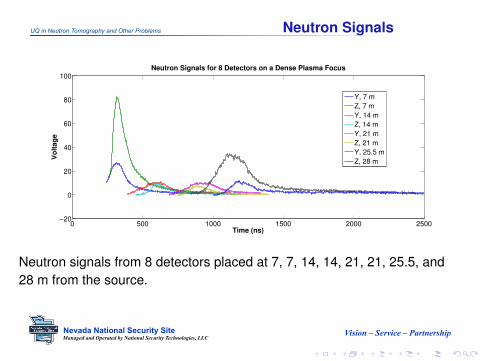
Neutron Signals for 8 Detectors on a Dense Plasma Focus
Y, 7 m
Z, 7 m
Y, 14 m
Z, 14 m
Y, 21 m
Z, 21 m
Y, 25.5 m
Z, 28 m
Neutron signals from 8 detectors placed at 7, 7, 14, 14, 21, 21, 25.5, and28 m from the source.
Neutron Signals
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
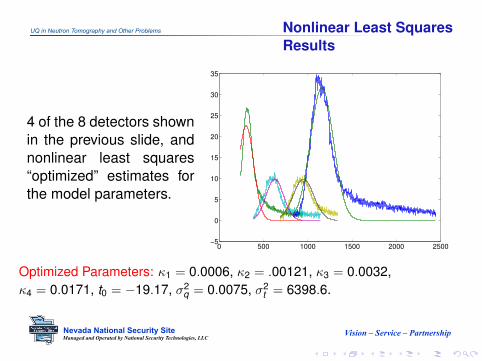
4 of the 8 detectors shownin the previous slide, andnonlinear least squares“optimized” estimates forthe model parameters.
0 500 1000 1500 2000 2500−5
0
5
10
15
20
25
30
35
Optimized Parameters: κ1 = 0.0006, κ2 = .00121, κ3 = 0.0032,κ4 = 0.0171, t0 = −19.17, σ2
q = 0.0075, σ2t = 6398.6.
Nonlinear Least SquaresResults
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
I Highly sensitive to initial guesses for parameters: “solutionregimes,”
I Also sensitive to the number of detectors used and howself-consistent the detector data is,
I No natural method for estimating "error bars" on the parametervalues,
I Assumes a Gaussian noise model, which is not really our case,unless using a weighted least squares, which can be difficult toformulate as an MLE for any realistic error model.
Nonlinear LSq Issues
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
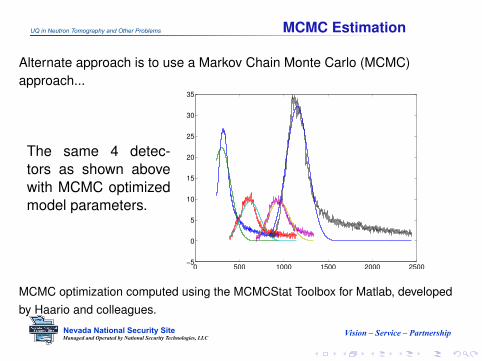
Alternate approach is to use a Markov Chain Monte Carlo (MCMC)approach...
The same 4 detec-tors as shown abovewith MCMC optimizedmodel parameters.
0 500 1000 1500 2000 2500−5
0
5
10
15
20
25
30
35
MCMC optimization computed using the MCMCStat Toolbox for Matlab, developedby Haario and colleagues.
MCMC Estimation
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
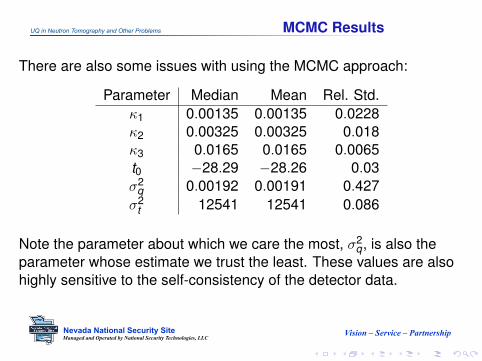
There are also some issues with using the MCMC approach:
Parameter Median Mean Rel. Std.κ1 0.00135 0.00135 0.0228κ2 0.00325 0.00325 0.018κ3 0.0165 0.0165 0.0065t0 −28.29 −28.26 0.03σ2
q 0.00192 0.00191 0.427σ2
t 12541 12541 0.086
Note the parameter about which we care the most, σ2q, is also the
parameter whose estimate we trust the least. These values are alsohighly sensitive to the self-consistency of the detector data.
MCMC Results
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
κ1 κ2 κ3
6.8 7 7.2 7.4 7.6 7.8
x 10−4
0
100
200
300
400
500
600
1.2 1.25 1.3 1.35 1.4 1.45 1.5
x 10−3
0
100
200
300
400
500
600
2.9 3 3.1 3.2 3.3 3.4 3.5 3.6
x 10−3
0
100
200
300
400
500
600
t0 σ2q σ2
t
−29 −28 −27 −26 −25 −24 −23 −220
100
200
300
400
500
600
1.5 2 2.5 3 3.5 4 4.5 5
x 10−3
0
100
200
300
400
500
600
0.85 0.9 0.95 1 1.05 1.1 1.15 1.2 1.25
x 104
0
50
100
150
200
250
300
350
400
450
500
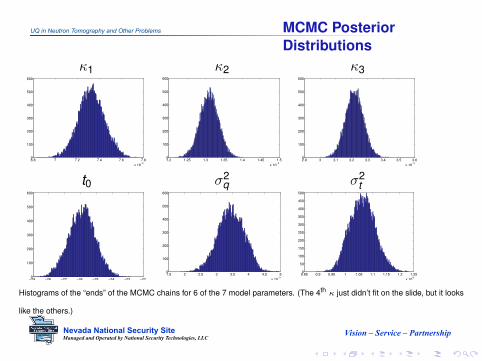
Histograms of the “ends” of the MCMC chains for 6 of the 7 model parameters. (The 4th κ just didn’t fit on the slide, but it looks
like the others.)
MCMC PosteriorDistributions
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
I Also sensitive to initial guesses,
I Requires some notion of initial distributions on parameters,
I Not as robust to inconsistencies in the data,
I The posterior distributions may just be a function of the errorfunction and the assumed prior distributions, rather than reallymeaningful distributions for error estimation.
I A Pro: a variety of objective functions can be used to computethe chains in order to treat different noise models.
Issues with MCMCApproach
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
I This is just one of several parameter estimation problems that wehave in order to extract meaningful information from real data.
I We also have non-parametric signal reconstruction problemsthat we solve and are working to incorporate systematic UQ.
I We’re starting to work with John and Heikki on some furthermethodology, but
I we are happy to take suggestions for approaches.
Where we stand...
Vision – Service – Partnership Managed and Operated by National Security Technologies, LLC Nevada National Security Site
UQ in Neutron Tomography and Other Problems
Thank you!
I We thank Tim Meehan for the DPF schematic and Chris Hagenand the entire NSTec DPF team for the DPF data and for helpfulcomments and suggestions on the physics of controlled fusion.
I Feel free to contact me if you have any questions or comments,or for references, offprints, and [email protected]