Embed Size (px)
Citation preview
TESTE F ESPECTRAL BAYESIANO PARA CLASSIFICAÇÃO DE MOVIMENTOS
DA MÃO COM SINAIS EMG
Raffaela de Castro Cunha
Dissertação de Mestrado apresentada ao
Programa de Pós-graduação em Engenharia
Biomédica, COPPE, da Universidade Federal
do Rio de Janeiro, como parte dos requisitos
necessários à obtenção do título de Mestre em
Engenharia Biomédica.
Orientadores: Carlos Julio Tierra-Criollo
Antonio Mauricio Ferreira
Leite Miranda de Sá
Rio de Janeiro
Setembro de 2016

TESTE F ESPECTRAL BAYESIANO PARA CLASSIFICAÇÃO DE MOVIMENTOS
DA MÃO COM SINAIS EMG
Raffaela de Castro Cunha
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO
LUIZ COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE)
DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM
CIÊNCIAS EM ENGENHARIA BIOMÉDICA.
Examinada por:
________________________________________________
Prof. Carlos Julio Tierra-Criollo, D.Sc.
________________________________________________ Prof. Luciano Luporini Menegaldo, D.Sc
________________________________________________ Prof. Eduardo Vieira Leão Nunes, D.Sc.
________________________________________________ Prof. Marco Antonio Cavalcanti Garcia, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
SETEMBRO DE 2016

iii
Cunha, Raffaela de Castro
Teste F Espectral Bayesiano para classificação de
movimentos da mão com sinais EMG / Raffaela de Castro Cunha
– Rio de Janeiro: UFRJ/COPPE, 2016.
X, 74 p.; 29,7 cm.
Orientadores: Carlos Julio Tierra-Criollo
Antônio Mauricio Ferreira Leite Miranda de Sá
Dissertação (mestrado) – UFRJ / COPPE/ Programa de
Engenharia Biomédica, 2016.
Referências Bibliográficas: p. 67 - 69.
1. Eletromiografia 2. Teste F Espectral. 3. Classificação do
movimento da mão. 4. Acidente Vascular Encefálico. I. Tierra-
Criollo, Carlos Julio et al. II. Universidade Federal do Rio de Janeiro,
COPPE, Programa de Engenharia Biomédica. III. Título.

iv
DEDICATÓRIA
À minha família: Francisco, Ivonete e Gabrielle.

v
AGRADECIMENTOS Ao Professor Carlos Julio por dedicar-se de forma tão atenciosa e paciente a me
orientar na realização deste trabalho e pelos valiosos ensinamentos que certamente levarei
para minha vida pessoal e profissional.
Ao Professor Antonio Mauricio pela orientação fundamental no desenvolvimento
deste trabalho.
À Professora Ana Paula Fontana e toda a sua equipe do Serviço de Fisioterapia do
HUCFF (em especial à Gislaine, Inaiacy, Ana Victoria e Fernanda), por disponibilizarem
o espaço para a realização das coletas de sinais e pela grande disposição em ajudar,
contribuindo muito para este trabalho.
Aos Professores Antonio Fernando Catelli Infantosi (in memoriam), Mauricio
Cagy e Paulo José Guimarães por toda a experiência passada e por procurarem sempre
contribuir de diversas formas na formação de seus alunos.
Ao Alexandre Jacobina, pelo excelente trabalho como secretário do programa e
toda a prontidão em ajudar os alunos.
Ao Pablo Cevallos e ao Aluizio D’Affonsêca pela amizade e pela generosidade ao
transmitirem seus conhecimentos e se disporem a ajudar sempre que possível.
À Mariana Massote, pela companhia e amizade ao longo de toda esta trajetória na
UFRJ.
À Lorena Caruso e à Beatriz Junqueira pelos bate-papos e longas risadas, que
certamente fizeram este período muito mais leve e feliz.
Aos colegas do PEB que estiveram comigo durante este período, pela pronta
ajuda, parceria e companhia sempre agradável.
Ao Victor Campos, pela inestimável ajuda e apoio durante todo este período.
Ao Francisco Cunha e à Ivonete Cunha por me apoiarem e me guiarem de forma
incondicional ao longo de toda esta caminhada, possibilitando que eu chegasse até aqui.
À Gabrielle Cunha e ao Anderson Diniz por todo o suporte e incentivo em mais
uma etapa.
Ao Augusto Alves Jr. pelos valiosos conselhos e pela experiência passada.
A todos os voluntários dos experimentos realizados neste trabalho, por
disponibilizarem seus tempos pra que esta pesquisa fosse possível.
Aos órgãos de fomento, CAPES e CNPq, pelo apoio financeiro.
vi
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
TESTE F ESPECTRAL BAYESIANO PARA CLASSIFICAÇÃO DE MOVIMENTOS
DA MÃO COM SINAIS EMG
Raffaela de Castro Cunha
Setembro/2016
Orientadores: Carlos Julio Tierra-Criollo
Antonio Mauricio Ferreira Leite Miranda de Sá.
Programa: Engenharia Biomédica
Sistemas de controle baseados em eletromiografia (EMG) capazes de reconhecer
a intenção de movimento do indivíduo e convertê-la no acionamento de um dispositivo
externo são utilizados como apoio à reabilitação de indivíduos acometidos por prejuízos
motores, como a hemiparesia após Acidente Vascular Encefálico (AVE). Este trabalho
desenvolve um novo algoritmo para a classificação de sinais de EMG entre movimentos
de flexão e extensão dos dedos da mão, além do relaxamento dos mesmos, com base na
razão entre as energias de sinais de dois músculos. A classificação divide-se em duas
etapas que se complementam através de uma árvore de decisão: a primeira decide entre
movimento, relaxamento e repouso e a segunda entre extensão e flexão. Ambas etapas
utilizam o teste F espectral (TFE) para identificar diferenças entre as densidades
espectrais de potências dos sinais de EMG, diferindo apenas nas abordagens estatísticas.
O classificador foi avaliado com sinais coletados em 25 indivíduos com função motora
normal e 7 pacientes com hemiparesia após AVE. Os resultados mostraram uma acurácia
média de aproximadamente 90% entre os pares de músculos avaliados no primeiro grupo.
Foram realizados estudos de caso que mostram que é possível obter resultados
satisfatórios para sujeitos em estágios menos severos de hemiparesia (acurácia>=70%),
embora ainda inferiores aos daqueles com função motora normal. Algumas adaptações
na técnica aplicada devem levar a um melhor desempenho dos classificadores para
pacientes.

vii
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
EMG BASED CLASSIFICATION OF HANDS MOVEMENTS USING BAYESIAN
SPECTRAL F TEST
Raffaela de Castro Cunha
September/2016
Advisors: Carlos Julio Tierra-Criollo
Antonio Mauricio Ferreira Leite Miranda de Sá.
Department: Biomedical Engineering
Control systems based on Electromyography (EMG) capable of recognizing a
subject's intention of movement and convert it to set an external device are used to support
rehabilitation of individuals with motor impairment, such as post stroke hemiparesis. This
work develops an algorithm for classifying EMG signals on hands flexion, extension and
relaxing based on the ratio between the energies of two muscles. The classification
method is divided into two complementary steps, where the first one decides among
movement, relaxing and rest and the second one decides between flexion and extension.
Both are based on Spectral F Test (SFT) to identify spectral differences between signals,
differing only on the method used for determining the threshold of classifying. The
classifier was assessed on signals collected in 25 individuals with normal motor function
and 7 post stroke subjects with hemiparesis. The results for the first group show an
average accuracy ratio of 90%. Case studies were performed showing that it is possible
to obtain satisfactory results for subjects in less severe stages of hemiparesis (accuracy
≥70%), although it is still lower than the performance of the other group. Some
adaptations should be performed to improve the classifier performance.
viii
SUMÁRIO 1 Introdução ............................................................................................... 1
1.1 Acidente Vascular Encefálico (AVE) e deficiências motoras ........................... 1
1.2 Tecnologias para assistência e apoio à reabilitação ........................................... 1
1.3 Objetivo ............................................................................................................. 2
1.4 Objetivos específicos ......................................................................................... 3
1.5 Estrutura do Trabalho ........................................................................................ 3
2 Revisão da literatura ............................................................................... 4
2.1 A hemiparesia após AVE ................................................................................... 4
2.2 Reabilitação e tecnologias assistivas ................................................................. 4
2.3 Sinais de Eletromiografia (EMG) ...................................................................... 5
2.4 Controle de dispositivos por EMG .................................................................... 8
2.5 Teoria da detecção ........................................................................................... 13
2.6 Classificadores ................................................................................................. 15
2.6.1 O Teste F espectral (TFE) ........................................................................ 15
2.6.2 Análise de Discriminantes Lineares (LDA) ............................................. 18
2.6.3 Máquina de Vetores de Suporte (SVM) ................................................... 19
3 Materiais e métodos .............................................................................. 21
3.1 Sistema de aquisição de sinais ......................................................................... 21
3.2 Protocolo experimental .................................................................................... 22
3.3 Processamento de sinais ................................................................................... 25
3.3.1 Identificação dos instantes de movimento pelo sinal de acelerometria .... 26
3.3.2 Extração de características........................................................................ 27
3.3.3 Identificação de ativação e desativação muscular por canal com TFE .... 28
3.3.4 Classificação inicial entre extensão e flexão ............................................ 30
3.3.5 Classificação final (Árvore de decisão) .................................................... 33
3.3.6 Avaliação do classificador ........................................................................ 34
3.4 Estimativa de co-contração .............................................................................. 36
4 Resultados............................................................................................. 37
4.1 Desempenho teórico do classificador Bayesiano ............................................. 37
4.2 Identificação de ativação e desativação muscular ........................................... 38
4.3 Classificador com TFE bayesiano ................................................................... 40
4.4 Classificadores LDA e SVM ........................................................................... 43
ix
4.5 Desempenho dos classificadores...................................................................... 46
4.6 Estimativas de co-contração ............................................................................ 50
4.7 Estudo de caso com pacientes (Grupo B) ........................................................ 51
4.7.1 Voluntário B01 ......................................................................................... 51
4.7.2 Voluntário B02 ......................................................................................... 57
4.7.3 Comparações entre desempenho e FMA de pacientes ............................. 61
5 Discussão .............................................................................................. 62
6 Conclusão ............................................................................................. 66
7 Bibliografia ........................................................................................... 67
8 Apêndice A ........................................................................................... 70
9 Apêndice B ........................................................................................... 72
9.1 Voluntário B03................................................................................................. 72
9.2 Voluntário B04................................................................................................. 73
9.3 Voluntário B05................................................................................................. 73
9.4 Voluntário B06................................................................................................. 74
9.5 Voluntário B07................................................................................................. 74
x
NOMENCLATURA AVE – Acidente Vascular Encefálico
AVD – Atividades de Vida Diária
ECD – Extensor Comum dos Dedos
ECP - Extensor Curto do Polegar
EEG – Eletroencefalografia
EMG – Eletromiografia
FLP – Flexor Longo do Polegar
FPD – Flexor Profundo dos Dedos
FSD – Flexor Superficial dos Dedos
LDA – Discriminantes Lineares de Fisher
MUAP – Potencial de ação de unidade motora
PID – Primeiro Interosseo Dorsal
PSD – Densidade Espectral de Potências
SVM – Máquina de Vetores de Suporte
TFE – Teste F Espectral
1
1 Introdução
1.1 Acidente Vascular Encefálico (AVE) e deficiências motoras
Diversas patologias neurológicas ou episódios traumáticos podem levar à perda
de controle motor dos indivíduos acometidos. Dentre os episódios mais comuns, está o
AVE, sendo este o segundo com maior incidência na população mundial. O AVE ocorre
pela interrupção de parte da circulação sanguínea no encéfalo, devido ao rompimento ou
oclusão de vasos que levam sangue ao mesmo, causando danos ao tecido cerebral (“WHO
| Stroke, Cerebrovascular accident” 2014). Em 65% dos casos de sobrevivência a este
episódio, o indivíduo apresenta comprometimentos funcionais (Teo e Chew 2014), sendo
o mais comum a perda de controle motor ou de força de músculos da face, dos membros
superiores ou inferiores no lado do corpo contralateral ao hemisfério cerebral onde
ocorreu a lesão, condição chamada de hemiparesia.
Em 73 a 88% dos sobreviventes, a função de membro superior é afetada, entre os
quais, 55 a 75% são casos de hemiparesia (de Medeiros et al. 2014). Sendo o membro
superior um segmento muito importante para a realização de funções como manipulação,
preensão e alcance, a perda de sua função pode afetar de forma significativa a realização
das atividades de vida diárias (AVDs) dos indivíduos, tendo como consequência a perda
de qualidade de vida (de Medeiros et al. 2014; Brol e Magagnin 2010). Uma das
condições que decorre da maioria dos casos de hemiparesia após AVE é a espasticidade,
a qual caracteriza-se por um aumento no tônus muscular ao longo do tempo, o que pode
dificultar a reabilitação do paciente (Brol e Magagnin 2010).
1.2 Tecnologias para assistência e apoio à reabilitação
Diversas técnicas têm sido aplicadas com o objetivo de reduzir os efeitos das
disfunções motoras causadas aos pacientes. Em todos os casos, para que a reabilitação
seja eficaz, é necessário que o treinamento seja repetitivo e ao mesmo tempo motivador
para o indivíduo (Kwakkel, Kollen, e Krebs 2007). Dada a dificuldade de se conduzir
treinamentos que atendam a estes requisitos na clínica, tecnologias de suporte têm sido
amplamente empregadas na reabilitação, tais como robôs e exoesqueletos. Tratamentos
com o uso de tais tecnologias já foram relatados na literatura, promovendo melhores
resultados em relação aos tratamentos convencionais (Kwakkel, Kollen, e Krebs 2007;
Dipietro et al. 2005).
2
Uma forma de se controlar estes dispositivos de forma natural é por meio de sinais
de eletromiografia (EMG). Alguns estudos já mostraram a possibilidade de se detectar
atividade de EMG voluntária em pacientes hemiparéticos após AVE (Dipietro et al. 2005;
Zhang et al. 2013) . Deve-se, porém, considerar que há diversas alterações no que diz
respeito ao recrutamento motor e características musculares decorrentes da lesão,
influenciando em características do sinal de EMG destes indivíduos (Dipietro et al. 2005;
Zhou, Suresh, e Rymer 2007). De forma geral, membros paréticos apresentam maiores
níveis de co-contração (contração simultânea dos músculos agonistas e antagonistas a um
dado movimento) que em sujeitos com função motora normal e menores níveis de força
muscular. Na literatura, usualmente se estima a co-contração por meio da razão entre os
valores RMS de um músculo antagonista e um músculo agonista a um dado movimento
(Chae et al. 2002; Ohn et al. 2013). Este dado pode, além de fornecer informações sobre
o estado do paciente, ajudar a distinguir entre movimentos opostos, como a extensão e
flexão dos dedos da mão.
Uma contração muscular é caracterizada pelo aumento do número de unidades
motoras recrutadas e de suas taxas de disparo, levando a variações de energia em certas
bandas de frequência (Merletti e Parker 2004). Assim, a densidade espectral de potências
(PSD) do sinal de EMG pode fornecer dados úteis para a detecção de ativações
musculares e, utilizando-se múltiplos canais, para o reconhecimento de padrões em
diferentes movimentos. Diversos trabalhos realizaram o controle de dispositivo por EMG
com base em características em tempo-frequência do EMG, levando a bons resultados
(M. Khezri e Jahed 2007; Mahdi Khezri e Jahed 2007). Para realizar a classificação dos
movimentos, características com base em PSD para diferentes estados de ativação devem
ser comparadas. Neste contexto, o Teste F Espectral (TFE) pode ser utilizado, visto que
é um teste estatístico para inferir diferenças entre duas estimativas espectrais (Simpson et
al. 2000; Sá et al. 2009).
Propõe-se neste trabalho o desenvolvimento e avaliação de uma técnica para
classificação de movimentos de extensão e flexão dos dedos da mão, com base na razão
entre as variâncias de sinais de EMG de dois músculos, sendo um agonista e o outro
antagonista aos movimentos.
1.3 Objetivo
O objetivo deste trabalho foi desenvolver e avaliar uma técnica de processamento
de sinais estatístico, com base no teste F espectral, para classificação de movimentos de
3
abertura e fechamento da mão baseada em sinais de EMG. Esta técnica deve ser
posteriormente aplicada no controle em tempo real de dispositivos externos por pacientes
com hemiparesia após AVE e na avaliação dos estágios de recuperação motora e
funcional destes pacientes.
1.4 Objetivos específicos
Os objetivos específicos deste trabalho foram:
Desenvolver algoritmos para detectar e classificar movimentos de abertura
e fechamento da mão com base no TFE da razão entre as variâncias dos
sinais provenientes de dois músculos, sendo um agonista e o outro
antagonista aos movimentos, com abordagem bayesiana;
Avaliar o funcionamento do classificador a partir de sinais de EMG
coletados em sujeitos com função normal de membro superior e em
membros paréticos de pacientes após AVE. Comparar seu desempenho
com classificadores LDA (Análise de Discriminantes Lineares) e SVM
(Máquina de Vetores de Suporte).
Realizar uma análise offline preliminar das características extraídas dos
sinais de EMG de pacientes, averiguando a possibilidade de utilização das
mesmas como indicadores do nível de recuperação funcional e motora do
paciente.
1.5 Estrutura do Trabalho
No Capítulo 1 foram apresentados a introdução e objetivos do trabalho. No
Capítulo 2, realiza-se uma revisão da literatura, em que se caracteriza a hemiparesia após
AVE e tecnologias empregadas na reabilitação, apresenta-se uma revisão sobre sinais de
EMG e técnicas de processamento de sinais utilizadas para classificação offline de
movimentos da mão com base nestes sinais, e, finalmente, explica-se os fundamentos
teóricos e técnicas de processamento de sinais que são utilizadas neste trabalho. No
Capítulo 3, descreve-se a metodologia utilizada na coleta de sinais de EMG, na extração
de características e na classificação destes sinais. A seguir, no capítulo 4, descreve-se os
resultados relativos à avaliação das características extraídas pelo algoritmo implementado
e do desempenho do classificador. No Capítulo 5, os resultados são discutidos e, por fim,
apresenta-se a conclusão, no Capítulo 6.
4
2 Revisão da literatura
2.1 A hemiparesia após AVE
A hemiparesia é um comprometimento motor que ocorre em apenas um lado do
corpo, em consequência de episódios de AVE. Tal comprometimento caracteriza-se pela
perda de força e de coordenação motora levando à perda total ou parcial da funcionalidade
do membro acometido. Quando a hemiparesia se manifesta no membro superior, provoca
sérios prejuízos à qualidade de vida do indivíduo, pois funções básicas, como
manipulação, preensão e alcance são bastante dificultadas, prejudicando a realização
normal das AVDs (de Medeiros et al. 2014; Brol e Magagnin 2010).
A perda de força e de coordenação nos membros paréticos é explicada
principalmente por um recrutamento inadequado das unidades motoras e também por
mudanças nas características musculares do membro atingido. Alguns estudos
demonstraram que ocorre um aumento na co-contração (ativação simultânea de músculos
agonistas e antagonistas) correlacionada à severidade da hemiparesia, o que leva à perda
de sinergia no movimento (Ohn et al. 2013). Em grande parte dos casos, os membros
afetados apresentam espasticidade, a qual caracteriza-se por um tônus muscular
aumentado de forma anormal (Ohn et al. 2013). Na hemiparesia de membro superior, a
espasticidade manifesta-se principalmente nos músculos flexores, de forma que o punho
e os dedos ficam permanentemente flexionados, dificultando a execução de movimentos
básicos da mão.
2.2 Reabilitação e tecnologias assistivas
Diversos tratamentos podem ser empregados de forma a amenizar os fatores
responsáveis por prejudicar a função do membro parético. Estes tratamentos em geral
procuram induzir melhoras de forma passiva, como por exemplo pela realização de
movimentos passivos no membro visando principalmente à diminuição da espasticidade,
ou, de forma ativa, como pelo uso de estimulação elétrica funcional, imaginação motora
(Santos-Couto-Paz, Teixeira-Salmela, e Tierra-Criollo 2013) e terapias de indução do
movimento, com foco na recuperação da habilidade motora e da força (Ashford et al.
2008).
Alguns estudos mostram que a eficácia em tais tratamentos é maior quando estes
cumprem alguns requisitos, tais como: incluírem treinamentos repetitivos, serem
orientados a tarefas e serem significativos para o paciente, despertando o interesse e

5
motivando-o (Kwakkel, Kollen, e Krebs 2007). Especialmente durante um período crítico
após o episódio de AVE, se o tratamento for realizado de forma intensiva, há grandes
possibilidades de se reduzirem significativamente os danos (Eriksson, Mataric, e
Winstein 2005; Santos-Couto-Paz, Teixeira-Salmela, e Tierra-Criollo 2013). Porém,
tratamentos convencionais realizados em ambientes clínicos dificilmente conseguem
cumprir estes requisitos. Assim, tecnologias de assistência à reabilitação, como robôs,
próteses e exoesqueletos, têm sido propostas na literatura e implementadas como produtos
comerciais para uso clínico. Alguns estudos já comprovaram a maior eficácia nos
tratamentos que incluem tais tecnologias, além de promoverem diversos benefícios
adicionais como, por exemplo, a redução da dependência do paciente de um profissional
de saúde para execução do treinamento, permitindo que este seja feito mais vezes e com
maior frequência, além da motivação proporcionada ao paciente, devido ao feedback que
em geral pode ser obtido (Kwakkel, Kollen, e Krebs 2007; Dipietro et al. 2005). Tais
dispositivos tecnológicos permitem que o usuário exerça algum tipo de interação com os
mesmos, seja por meio de botões de comando a serem acionados pelo próprio usuário, ou
de sensores que fornecerão informações sobre posição ou intenção de movimento deste.
No caso das chamadas Interfaces Cérebro Máquinas (ICMs), por exemplo, sinais
cerebrais são captados e, dependendo do padrão encontrado a partir de um processamento,
diferentes comandos podem ser enviados ao dispositivo fina,l.
2.3 Sinais de Eletromiografia (EMG)
Uma ativação muscular ocorre a partir do surgimento de um potencial de ação na
membrana pós-sináptica de um motoneurônio alfa, o qual desencadeia uma série de
reações químicas na junção neuromuscular. Este potencial de ação ocorre quando, em um
motoneurônio, o influxo de íons de sódio (Na+) atinge um certo limiar, levando à
despolarização da membrana pós-sináptica. Em seguida, ocorre uma repolarização. Este
ciclo produz um dipolo elétrico que se espalha ao longo da superfície da fibra muscular.
A soma dos potenciais de ação de diferentes fibras em uma dada unidade motora formam
os chamados potenciais de ação de unidade motora (MUAP – Motor Unit Action
Potencial) e produzem a atividade elétrica muscular (EMG). Para que uma contração
muscular ocorra, podendo ou não produzir movimento, vários componentes contráteis
devem ser ativados, o que ocorre mediante o recrutamento de um maior número de
unidades motoras e um aumento nas frequências de disparo do potencial de ação. Assim,
estes potenciais de ação se superpõem, formando os chamados potenciais de ação
6
compostos musculares (CMAPS - Compound Muscle Action Potentials), os quais podem
ser captados por eletrodos de forma invasiva (como, por exemplo, por eletrodos agulha)
ou de forma não invasiva, por meio de eletrodos de superfície (sEMG) (Konrad 2005).
No caso invasivo, apenas os MUAPs de uma ou poucas unidades motoras contribuem
para o sinal captado, com menor nível de ruído, de forma que os potenciais de ação são
distinguíveis. Isto permite avaliar características das fibras musculares e unidades
motoras. Sinais de sEMG, por sua vez, são compostos por potenciais de ação de um
conjunto de muitas unidades motoras superpostos. Tal superposição pode gerar diferentes
formas de sinais a depender da posição dos eletrodos relativas às unidades motoras e das
posições das unidades motoras entre si, além de suas velocidades de condução individuais
(Merletti e Parker 2004). Desta forma dificilmente será possível distingui-las. Em
contrapartida, o sEMG permite uma análise mais ampla sobre os padrões de
recrutamento, sendo útil no estudo de distúrbios de movimentos causados por algumas
doenças ou após episódios traumáticos, e até mesmo no controle de próteses e outros
dispositivos para reabilitação (Merletti e Parker 2004). Para esta última aplicação, o
sEMG mostra-se adequado, pois este se caracteriza pela soma das contribuições de cada
músculo dentro de um grupo muscular na região próxima à localização do eletrodo, as
quais são função do movimento intencionado.
Como este trabalho tem como foco os sinais de sEMG, o termo EMG se referirá
sempre a estes tipos de sinais. O sinal de EMG é um sinal aleatório de média zero, não
estacionário (Merletti e Parker 2004). O sinal bruto captado possui amplitudes em geral
entre alguns microvolts até 3 mV. O EMG sofre ainda influência das características de
condução dos tecidos biológicos existentes entre a fonte do sinal (unidades motoras) e o
eletrodo posicionado na superfície da pele, incluindo-se as características da interface
eletrodo-pele. Em geral, estas interfaces atuam como um tipo de filtro passa-baixas com
frequências de corte e ganho dependentes das dimensões dos tecidos e da interface
eletrodo-pele e suas propriedades de condução. O EMG pode ainda variar ou sofrer
interferências por parte de diversos processos, detalhados a seguir (Merletti e Parker
2004):
Instabilidades no contato dos eletrodos com a superfície da pele durante a
aquisição de sinais: podem resultar em transições rápidas e aleatórias da
linha de base do sinal.
7
Variações de posição da inervação muscular relativa ao eletrodo, durante
a execução de movimentos: provocam uma modulação em amplitude dos
sinais de EMG.
Artefatos de movimento: em geral possuem baixa frequência e podem ser
eliminados por um filtro passa-altas.
Crosstalk: posicionar um eletrodo acima de um dado músculo não garante
que o sinal lido provém de unidades motoras apenas deste, já que pode
haver contribuições de outros músculos próximos.
Interferência eletromagnética: é uma das principais fontes de ruído em
sinais de EMG, sendo a mais comum a da rede elétrica. Esta possui o
espectro centrado em frequências conhecidas (50 ou 60 Hz dependendo da
rede elétrica local), de modo que a simples aplicação de um filtro Notch
nestas frequências e em seus harmônicos é capaz de atenuá-las.
Ruído de instrumentação: componentes eletrônicos são utilizados na
construção dos sistemas de aquisição, os quais introduzem ruído devido as
suas características não ideais. O circuito eletrônico do sistema de
aquisição deve ser projetado de forma a minimizar o ruído de
instrumentação.
Interferências de outros sinais eletrofisiológicos: sinais de
eletrocardiograma (ECG), por exemplo, podem interferir nos sinais de
EMG captados. Requer a aplicação de filtros específicos ou técnicas de
redução de ruído (Merletti e Parker 2004).
Alguns tipos de interferência podem provocar uma interpretação incorreta dos
sinais adquiridos. Especialmente para o controle de sistemas e/ou dispositivos em tempo
real, por exemplo, um pico em amplitude provocado por qualquer um dos fatores acima
citados em sinais de EMG pode levar à ocorrência de um falso positivo, ou seja, o sistema
detecta um movimento, ou intenção de movimento, quando este na verdade não ocorreu.
De forma equivalente, níveis de ruído aleatório muito altos podem dificultar a detecção
das contrações musculares, introduzindo muitos falsos negativos.
No estágio de pré-processamento dos sinais adquiridos é aplicado geralmente um
filtro passa-bandas entre 20 e 450Hz, banda na qual o EMG está presente (Merletti e
Parker 2004). Este filtro é capaz de atenuar alguns dos artefatos acima citados, como o
artefato de movimento, mas não todos.

8
2.4 Controle de dispositivos por EMG
O uso de sinais de eletromiografia (EMG) para controle de dispositivos tem sido
bastante explorado. As primeiras aplicações descritas na literatura foram desenvolvidas
para o controle de próteses para amputados na década de 1960 (Rothchild e Mann 1966).
Inicialmente os dispositivos trabalhavam em um simples modo liga-desliga para controlar
a abertura e fechamento de próteses de mãos. Mais tarde, no Canadá, surgiu o chamado
controlador de três estados (three-state controller), o qual permitia controlar três
diferentes funções da mão através de um único músculo (Scott e Dorcas 1966). Com a
expansão destes estudos e a aplicação prática na clínica, a usabilidade tornou-se um fator
fundamental visto que os benefícios propostos por estas próteses só se concretizariam se
estes fossem bem aceitos pelos usuários e profissionais de saúde. Para tal, estes
dispositivos precisavam ter uma controlabilidade adequada de forma que as pesquisas
passaram a voltar-se para a busca de soluções que tornassem o controle dos dispositivos
mais intuitivo e cada vez mais próximo do natural. No caso, quanto menos o indivíduo
precisar aprender a usar o sistema e quanto mais automático o aprendizado do sistema
sobre o seu movimento, mais natural será o controle. Ou seja, no caso ideal, bastaria que
o usuário executasse ou tentasse executar um movimento para que o sistema interpretasse
esta intenção, acionando a prótese ou dispositivo a ele conectado. Em outras palavras,
seria possível um controle mais ‘inconsciente’ (Merletti e Parker 2004; Cipriani et al.
2008). Os métodos que hoje mais se aproximam de promover um controle natural
baseiam-se em um controle proporcional – no qual o sinal de controle varia de acordo
com determinados parâmetros do EMG - e simultâneo de múltiplos graus de liberdade
(Jiang et al. 2012). O sinal de controle proporcional geralmente é estimado a partir do
valor médio absoluto do sinal de EMG (Scheme e Englehart 2013).
Ao longo dos últimos anos, diversas outras aplicações controladas por EMG foram
propostas, como: robôs de assistência à terapia para reabilitação, teleoperações, realidade
virtual, além de algumas aplicações não necessariamente voltadas para a área da saúde
como o controle de jogos e para Interação Humano Computador (HCI). A detecção da
intenção de movimento tem sido bastante explorada para os casos de controle de prótese
e teleoperações (Dipietro et al. 2005). Muitos dos trabalhos foram, inclusive, lançados
como produtos comerciais, como o Otto Bock e o I-Limb (“Sistemas protéticos de mãos
mioelétricas — Ottobock” 2016; “i-limb ultra | Touch Bionics” 2016).
Uma vantagem clara, portanto, do uso do EMG para o controle destes dispositivos
é a possibilidade de o usuário exercer um controle próximo ao natural (Naik e Kumar
9
2012). Dipietro e colaboradores (2005) enumeraram alguns benefícios do uso do EMG
para controlar um robô de suporte à terapia, dentre os quais, destacam-se:
Permite saber se o paciente está de fato tentando gerar movimento com o membro
em questão durante o treinamento, de forma que o treinamento torna-se mais
eficiente;
Permite que indivíduos com prejuízos severos possam utilizar os robôs, com o
único requisito de que os indivíduos sejam capazes de emitir sinais de EMG, ainda
que com baixas amplitudes e sem que necessariamente sejam capazes de produzir
o movimento;
Fornece dados úteis para entendimento do processo de recuperação do paciente,
além de permitirem avaliar de forma quantitativa e objetiva as habilidades
motoras do mesmo.
Como já mencionado na Seção 2.3, diversos fatores podem influenciar na
amplitude e frequência dos sinais de EMG adquiridos, de maneira que, além de variações
nos sinais durante a coleta individual, há também grandes variações entre indivíduos ou
em diferentes coletas. Tais variações ocorrem principalmente por diferenças nas sinergias
musculares entre indivíduos, diferenças nas densidades musculares e no posicionamento
dos eletrodos entre diferentes coletas (Gibson, Ison, e Artemiadis 2013).
Assim, grande parte dos algoritmos de controle a partir de EMG necessitam
previamente de uma seção para que o sistema “aprenda” as características dos sinais do
indivíduo, a partir das quais se estimam os parâmetros para a classificação. Estas seções
são denominadas, em alguns casos, seções de treinamento e pode ser necessário repeti-
las após determinado período de uso. Porém, especialmente por serem voltados para
pacientes em um ambiente clínico, o sistemas devem ser projetados de forma que não se
exijam longos períodos de treinamento e que tais seções não tenham que ser repetidas em
curtos espaços de tempo (Cipriani et al. 2008).
No caso específico da classificação de diferentes movimentos da mão, algumas
dificuldades devem ser consideradas, a seguir (Naik e Kumar 2012; Naik et al. 2006) :
Trata-se de músculos com pequena atividade, de forma que os sinais adquiridos
apresentarão baixa razão sinal-ruído (RSR).
Os músculos responsáveis pelo movimento da mão estão em sua maioria
superpostos ou muito próximos uns aos outros, gerando um alto crosstalk.

10
Qualquer movimento da mão é resultado da combinação da ativação de múltiplos
músculos, o que dificulta a classificação de um determinado movimento com
base na ativação de um único músculo.
O diagrama da Figura 2.1 ilustra um conjunto de etapas genérico comumente
utilizado no controle de sistemas e dispositivos de reabilitação por meio de sinais de
EMG.
Figura 2.1 - Etapas para classificação de movimentos a partir de sinais de EMG.
Para a classificação em diferentes movimentos, um conjunto de características
pode ser extraído dos sinais de EMG. Características no domínio do tempo, da frequência
e/ou em tempo-frequência podem ser utilizadas. Dentre as principais características no
tempo utilizadas estão: o valor RMS, o valor médio absoluto (MAV) e coeficientes do
modelo autorregressivo (AR). Diversos trabalhos mostraram melhores resultados ao
utilizar características em tempo-frequência do EMG. Por exemplo, Jahed e
colaboradores (2007) empregaram um método para construir o conjunto de características
a partir da Transformada de Fourier de Tempo Curto (STFT, do inglês, Short-Time
Fourier Transform). Para aplicar a transformada, o sinal foi dividido em segmentos
suficientemente pequenos de forma que o EMG pudesse ser considerado estacionário
dentro de cada segmento. A Transformada Discreta de Wavelet também foi citada em
outro estudo sendo utilizada para o mesmo fim (M. Khezri e Jahed 2007; Mahdi Khezri
e Jahed 2007).
Estudos recentes sobre a classificação de diferentes movimentos da mão procuram
ainda de alguma forma decompor os sinais em atividades provenientes de cada músculo
ou de diferentes sinergias, partindo do princípio que a atividade em um músculo é
resultante de diferentes sinergias com diferentes níveis de contribuição. Naik e
colaboradores (2012) utilizaram uma técnica de separação cega (BSS, do inglês, Blind
Source Separation), mais especificamente a Análise de Componentes Independentes para
decompor os sinais em atividade proveniente de cada musculo separadamente. A partir
das características resultantes da decomposição, os autores classificaram seis diferentes
movimentos da mão a partir do monitoramento de quatro músculos do antebraço. Outros

11
métodos como o casamento de espectros wavelet, a Análise de Componentes Principais
(PCA) e a Fatoração Não Negativa de Matrizes (NMF, do inglês, non-negative matrix
factorization) também são citadas na literatura como técnicas para a decomposição dos
sinais de EMG (Atoufi et al. 2014)
A ativação muscular (onset) em cada canal de leitura é em geral detectada como
um primeiro passo para a classificação do movimento. Tal ativação pode ser determinada
por estimativas em amplitude. Dentre os métodos mais utilizados para tais estimativas,
estão o cálculo da média móvel (MAV) e do valor médio quadrático (RMS) em janelas
de tempo do sinal de EMG (Konrad 2005). Estes métodos são calculados pelas Equações
(1) e (2) a seguir, para cada amostra n do sinal, onde N é o tamanho de janela considerado:
∑
(1)
∑
(2)
Geralmente, determina-se então um limiar com base no sinal de repouso e
considera-se que quando o valor RMS do sinal ultrapassa tal limiar, houve uma ativação
do músculo em questão. Do contrário, o músculo está desativado. Apesar de ser uma
técnica de fácil implementação e baixo custo computacional, este método, denominado
‘single threshold’ (limiar simples), é bastante suscetível a erros, especialmente quando há
altas razões sinal ruído. Assim, outros métodos foram propostos na literatura resultando
em detecções mais acuradas. Dentre estes métodos inclui-se a aplicação de modelos
wavelet, utilização de outros critérios estatísticos, como o double threshold (limiar duplo)
e a aplicação do filtro Teager Kaiser (TKEO), cuja saída é proporcional ao produto da
amplitude e frequência instantâneas do sinal (Li, Zhou, e Aruin 2007; Raez, Hussain, e
Mohd-Yasin 2006; Santos 2011).
Porém, para aplicação no controle em tempo real de um dispositivo externo, a
detecção somente de ativação e da desativação muscular pode ser insuficiente. Para a
classificação de sinais de EMG, diversas técnicas são usadas nos diferentes estudos,
dentre os quais destacam-se algoritmos baseados em Redes Neurais Artificiais, lógica
Fuzzy, classificadores lineares como os Discriminantes Lineares de Fisher (LDA) e
Máquinas de Vetores de Suporte (SVM) (Chowdhury et al. 2013).
12
Em pacientes com hemiparesia após AVE, o controle por EMG mostra-se uma
excelente alternativa, visto que estes em geral não conseguem realizar os movimentos de
forma completa, embora apresentem atividade mioelétrica. Dipietro e colaboradores
(2005) desenvolveram um sistema acionado por EMG para um robô de assistência à
terapia de pacientes com hemiparesia, para realização de movimentos de alcance. Foram
monitorados 4 canais de entrada e uma vez que o envelope do sinal de EMG de pelo
menos um dos canais ultrapassasse um dado limiar, o robô era acionado. Neste estudo,
havia apenas duas classes envolvidas: movimento e repouso (Dipietro et al. 2005).
Ao desenvolver sistemas controlados por EMG para pacientes após AVE, deve-
se ter atenção ao fato de que há diversas alterações no que diz respeito ao recrutamento
motor e características neuromusculares decorrentes da lesão, as quais influenciam
diretamente em suas atividades mioelétricas (Zhang et al. 2013). Devido ao recrutamento
inadequado, já mencionado na seção 2.1, alguns estudos mostram a presença de maiores
níveis de co-contração nos sinais de EMG. Isso significa que músculos agonistas e
antagonistas a um determinado movimento serão ativados quase que simultaneamente ao
tentar executar um movimento (Ohn et al. 2013). Chae e colaboradores (2002) estudaram
a correlação entre os parâmetros do sinal de EMG que quantificam o nível de co-
contração e a força de contração muscular e duas escalas de avaliação funcional capazes
de avaliar o nível de recuperação funcional do paciente e o nível de habilidade física do
mesmo, por meio, respectivamente, do método Fugl-Meyer (FMA, do inglês, Fugl Meyer
Motor Assessment ) e do teste de Habilidade Motora da mão (AMAT, do inglês, arm
motor ability test). Os sinais de EMG durante a execução de determinados movimentos
de membro superior em pacientes e em normais mostraram uma correlação negativa entre
os níveis de co-contração e os níveis de avaliação dos pacientes e uma correlação positiva
entre os mesmos níveis de avaliação e a força de contração. Em um estudo similar, Ohn
e colaboradores (2013) mostraram experimentalmente que o nível de co-contração possui
correlação positiva com a espasticidade, medida pela escala modificada de Ashworth
(MAS, do inglês, Modified Ashworth Scale) e negativa com a funcionalidade da mão,
medida com a escala FMA. Em ambos os estudos o nível de co-contração foi obtido pela
razão entre os valores RMS dos músculos agonista e antagonista no intervalo entre a
ativação e a desativação muscular.
Aponta-se também na literatura que nos membros paréticos a frequência mediana
é em geral menor e decresce de maneira mais suave que em membros normais. (Toffola
et al. 2001). Além disso, devido à espasticidade, alguns músculos podem apresentar uma
13
atividade involuntária inerente, que pode ser confundida com a atividade voluntária,
especialmente porque a primeira tende a se manifestar justamente durante a execução do
movimento voluntário. Portanto, esta atividade deve ser modelada como ruído para a
classificação de intenção de movimento. Zhang e colaboradores (2013) realizaram um
estudo no qual pacientes após AVE realizam diversos movimentos com o membro
parético que são classificados por meio de um sistema de controle com base na entropia
do EMG. Diferentes seções foram realizadas, com maior ou menor velocidade do
movimento de forma a se gerar maior ou menor atividade involuntária. O estudo concluiu
que quando a atividade involuntária dos músculos espásticos é maior, a acurácia da
classificação foi bastante reduzida em relação as seções em que a atividade involuntária
teria sido menor (Zhang et al. 2013).
2.5 Teoria da detecção
Um problema básico de detecção ocorre quando se pretende decidir sobre a
presença ou não de um sinal de interesse em meio a ruído branco. Como exemplo,
pretende-se identificar para cada janela de sinais de EMG de um dado músculo, se houve
uma contração muscular ou se foi mantido repouso. Estimando-se os valores RMS do
EMG durante a contração e durante um período de repouso, sabe-se que para cada caso a
função densidade de probabilidade (PDF) correspondente será diferente. Em um caso
simples, pode-se aproximar as distribuições a duas gaussianas, sendo que a média da
distribuição correspondente ao período de contração muscular será maior que a média da
distribuição correspondente ao período de repouso, como ilustra a Figura 2.2.
Assim, os valores RMS de sinais coletados em períodos de repouso podem ser
modelados por um ruído gaussiano de média zero e variância 2 (H0). Por outro lado,
durante uma contração muscular, pode-se modelar tais valores pelo mesmo ruído
gaussiano, porém somado a uma constante A (H1). Estas duas hipóteses são representadas
abaixo:
H0: X ~ η (0,2), corresponde ao repouso
H1: X ~ A + η (0,2), corresponde ao movimento
onde ~ significa “é distribuído segundo” e η (µ,2) é a distribuição normal com média µ
e variância 2.
Para se decidir a qual distribuição pertence um dado segmento do sinal, um teste
de hipóteses deve então ser realizado. Para tal, determina-se um limiar , o qual separa
14
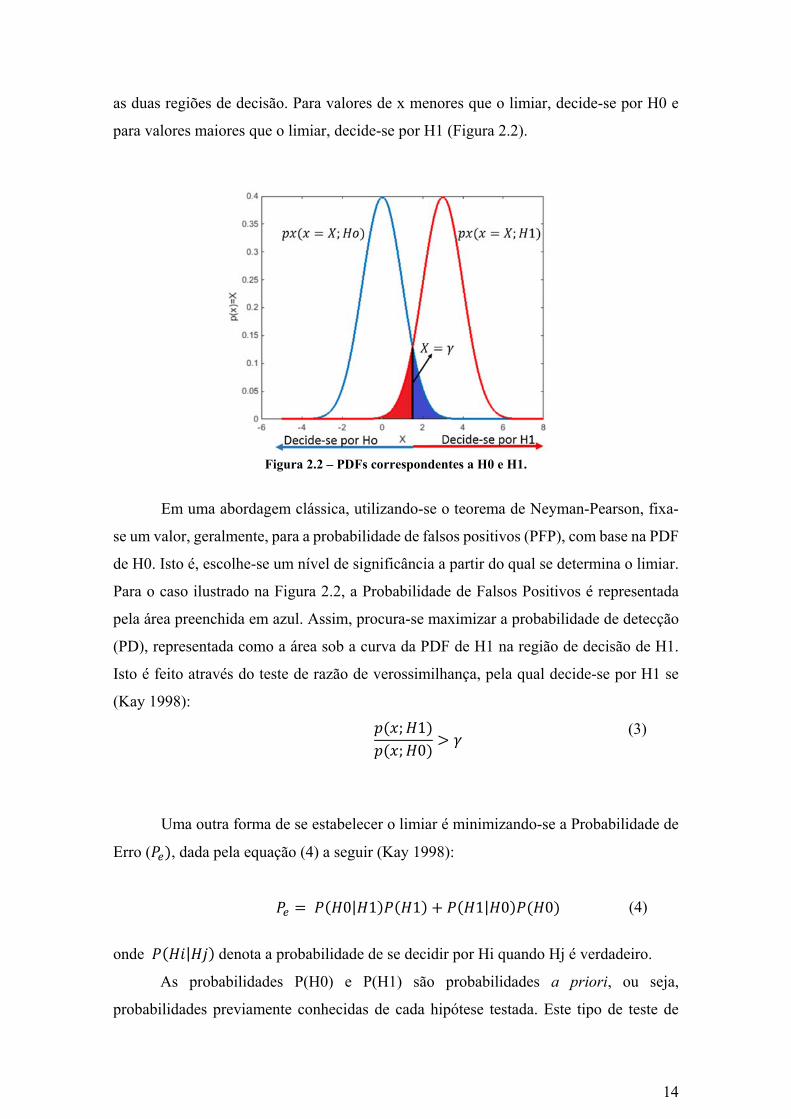
as duas regiões de decisão. Para valores de x menores que o limiar, decide-se por H0 e
para valores maiores que o limiar, decide-se por H1 (Figura 2.2).
Figura 2.2 – PDFs correspondentes a H0 e H1.
Em uma abordagem clássica, utilizando-se o teorema de Neyman-Pearson, fixa-
se um valor, geralmente, para a probabilidade de falsos positivos (PFP), com base na PDF
de H0. Isto é, escolhe-se um nível de significância a partir do qual se determina o limiar.
Para o caso ilustrado na Figura 2.2, a Probabilidade de Falsos Positivos é representada
pela área preenchida em azul. Assim, procura-se maximizar a probabilidade de detecção
(PD), representada como a área sob a curva da PDF de H1 na região de decisão de H1.
Isto é feito através do teste de razão de verossimilhança, pela qual decide-se por H1 se
(Kay 1998):
; 1; 0
(3)
Uma outra forma de se estabelecer o limiar é minimizando-se a Probabilidade de
Erro ( , dada pela equação (4) a seguir (Kay 1998):
0| 1 1 1| 0 0
(4)
onde | denota a probabilidade de se decidir por Hi quando Hj é verdadeiro.
As probabilidades P(H0) e P(H1) são probabilidades a priori, ou seja,
probabilidades previamente conhecidas de cada hipótese testada. Este tipo de teste de
15
hipóteses é chamado de paradigma Bayesiano. Neste caso, para se obter uma
Probabilidade de Erro mínima, deve-se decidir por H1 se (Kay 1998):
| 1| 0
01
(5)
Isto é, o limiar neste caso será dado pela razão entre as probabilidades a priori das
hipóteses consideradas. Quando as probabilidades a priori são consideradas iguais, temos
a equação (6), a qual representa o chamado detector de máxima verossimilhança (ML):
| 1 | (6)
2.6 Classificadores
2.6.1 O Teste F espectral (TFE)
Dadas duas variáveis aleatórias e , com distribuições Qui-quadradas com
e graus de liberdade, respectivamente, tem-se que a razão entre estas variáveis
divididas pelos seus respectivos graus de liberdade resulta em uma distribuição F, como
explicitado a seguir (Kay 1998):
~ ,
(7)
O TFE é um teste estatístico utilizado para detectar diferenças entre duas
estimativas espectrais dentro da mesma frequência ou mesma banda de frequências com
base na distribuição F. Tomam-se dois segmentos distintos de sinais, y[n] e x[n], cada
qual dividido em M janelas. As transformadas de Fourier de cada janela de índice i (sendo
1 < i < M) são estimadas e denotadas, respectivamente, por e . O TFE é
realizado com base na razão das energias dos espectros estimados, conforme a equação
(8) (Sá et al. 2006; Simpson et al. 2000; Tierra-Criollo 2001) :
∅
∑ | |∑ | |
(8)

16
Se y[n] e x[n] são assumidos Gaussianos, de média zero e variâncias,
respectivamente, e , tanto o numerador quanto o denominador da Equação (8) são
distribuições proporcionais a Qui-Quadradas com 2M graus de liberdade. Portanto, a
razão será uma distribuição F da seguinte forma (Sá et al. 2009):
∅ ~ ,
(9)
Assim, denotando-se ⁄ , tem-se:
∅ ~ , (10)
Isto é, ∅ será uma distribuição F com fator de escalonamento a e 2M graus
de liberdade no numerador e no denominador. Quando as variâncias dos dois sinais são
iguais, a vale 1 e portanto ∅ resulta em uma distribuição F central, com valor esperado
e variância dados pelas equações (11) e (12) a seguir (L. Johnson, Kotz, e Balakrishnan
1995) :
, 2, 2 (11)
,2 2
2 4, 4
(12)
Um teste estatístico bicaudal, utilizando-se a abordagem Neyman Pearson, pode
então ser realizado, tendo como hipótese nula (H0) a não existência de diferença entre os
espectros, sendo neste caso ∅ ~ , . Estabelecendo-se um nível de
significância α, calculam-se os limiares inferior ( ) e superior ( ) da distribuição
, . Assim, quando:
• ∅ , conclui-se que não houve diferença significativa entre os
espectros e H0 é aceita;
• ∅ > , conclui-se que houve diferença significativa entre os espectros e a
energia do espectro do segmento do numerador é superior. Neste caso, rejeita-se
H0 à direita;
17
• ∅ < , conclui-se que houve diferença significativa entre os espectros e a
energia do espectro do segmento do numerador é inferior. Neste caso, rejeita-se
H0 à esquerda.
Sá e colaboradores (2006) realizaram um estudo para análise quantitativa do
fotorrecrutamento utilizando o teste F em sinais de EEG. Neste estudo, o mesmo método
de cálculo do teste F acima citado foi utilizado, sendo x[k] o segmento do sinal
imediatamente anterior à estimulação e y[k] o segmento do sinal durante a estimulação.
Utilizando-se o teste F foi possível determinar quando houve ou não resposta cortical ao
estímulo aplicado.
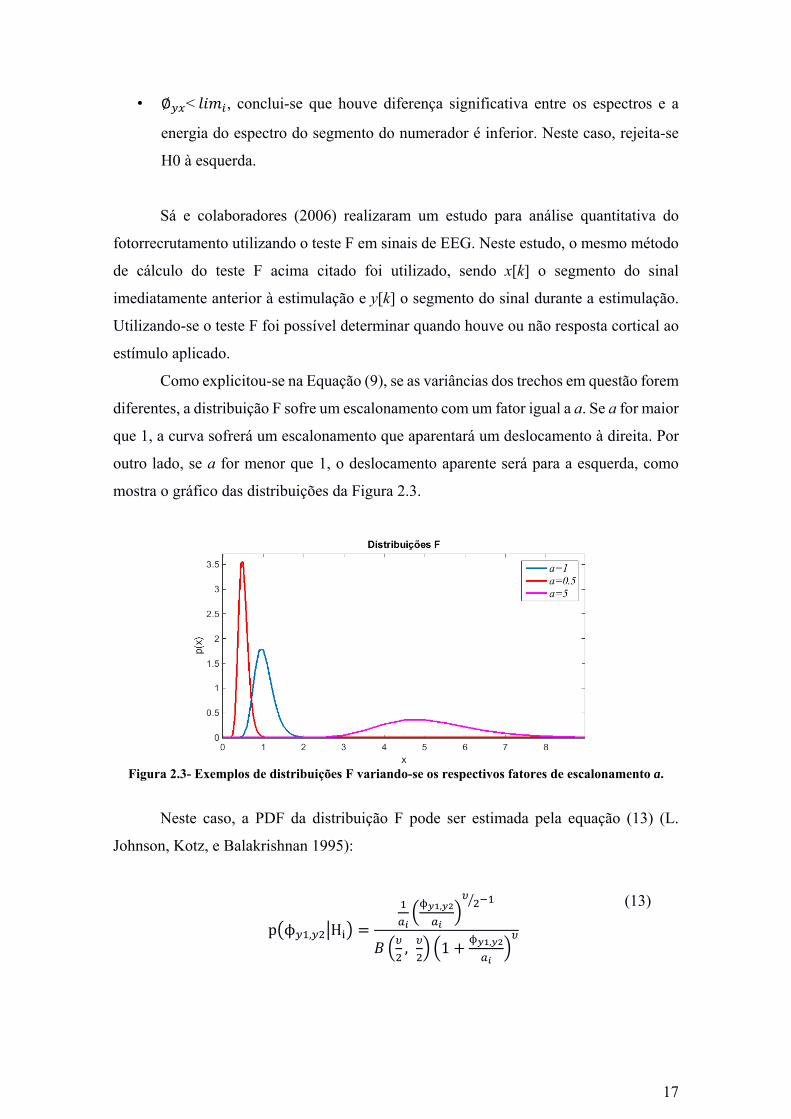
Como explicitou-se na Equação (9), se as variâncias dos trechos em questão forem
diferentes, a distribuição F sofre um escalonamento com um fator igual a a. Se a for maior
que 1, a curva sofrerá um escalonamento que aparentará um deslocamento à direita. Por
outro lado, se a for menor que 1, o deslocamento aparente será para a esquerda, como
mostra o gráfico das distribuições da Figura 2.3.
Figura 2.3- Exemplos de distribuições F variando-se os respectivos fatores de escalonamento a.
Neste caso, a PDF da distribuição F pode ser estimada pela equação (13) (L.
Johnson, Kotz, e Balakrishnan 1995):
p ϕ , H
,
, 1 ,
(13)

18
em que ia corresponde o fator de escalonamento a da distribuição correspondente à
hipótese iH e .
O valor esperado da distribuição F escalonada relaciona-se com o valor esperado
da distribuição F não escalonada (a=1), como dado pela equação (14):
, , (14)
2.6.2 Análise de Discriminantes Lineares (LDA)
O LDA, também conhecido como LDA de Fisher é um classificador linear
comumente utilizado para a classificação em tempo real de sinais biológicos, como o
eletroencefalograma (EEG) e o EMG.
A partir de um conjunto de amostras de dimensão n, x1, x2, ..., xn, dividido em dois
subconjuntos, X1 e X2, uma combinação linear destas amostras seria dada pelo produto
escalar a seguir:
(15)
Assim, um conjunto correspondente de amostras y1, y2, ..., yn, dividido em dois
subconjuntos Y1 e Y2 seria formado. O vetor w deve ser então escolhido de forma que se
obtenha a melhor separação entre estes subconjuntos (Duda, Hart, e Stork 2012). A
técnica Discriminantes Lineares de Fisher determina que a melhor separação pode ser
obtida maximizando-se as distâncias entre as médias das classes e minimizando-se a
variância cruzada entre as mesmas (Lotte et al. 2007). Para tal, escolhe-se w de forma que
J(w) representado pela equação (16) seja maximizado:
(16)
onde e são as médias das amostras dos subconjuntos Y1 e Y2 , respectivamente, e
e são os correspondentes espalhamentos (scatters, em inglês), explicitados nas
equações (17) e (18) a seguir, sendo o comprimento do subconjunto de índice i:
1 (17)

19
(18)
A Figura 2.4 ilustra a classificação utilizando a técnica LDA. Amostras de duas
classes (ω1, em verde e ω2, em vermelho) são classificadas de acordo com a região a qual
pertencem, separadas pela reta rosa.
Figura 2.4 - Dados pertencentes a duas classes (ω1 e ω2) e reta ótima de separação a parir do
algoritmo LDA
2.6.3 Máquina de Vetores de Suporte (SVM)
Assim como o LDA, o SVM também utiliza hiperplanos para separar as regiões
de classificação, diferindo no critério para a escolha do hiperplano. No caso, procura-se
o hiperplano com máxima margem, ou seja, maior distância entre as amostras mais
próximas (Lotte et al. 2007).
Tomando por base um classificador linear descrito pela equação (19), para
amostras xn, sendo 1<n<N e considerando-se que cada amostra recebe um rótulo cn ϵ {-
1,1}, que indica a classe à qual pertence, tem-se (Heijden et al. 2004):
(19)
para y >1, cn=1 e para y ≤ -1, cn=-1. Assim, pode-se escrever a seguinte inequação:
1
(20)
Uma vez que w é o vetor gradiente de y, o quadrado da margem é inversamente
proporcional a ‖ ‖ , o qual deve portanto ser minimizado para a maximização
da margem. Para realizar tal minimização pode-se utilizar os multiplicadores de

20
Lagrange. Assim, na equação (21), L deve ser maximizado com respeito a w e b e
minimizado em relação aos multiplicadores de Lagrange, . Diversos pacotes de
software disponíveis podem ser utilizados para tal.
12‖ ‖ 1 , 0
(21)
Uma outra particularidade do SVM é a possibilidade de utilização de limites não-
lineares através das chamadas funções kernel. Assim, pode-se mapear os dados a um outro
espaço de maior dimensão. Um kernel comumente utilizado é o Gaussiano (Duda, Hart,
e Stork 2012).
21
3 Materiais e métodos
3.1 Sistema de aquisição de sinais
Adaptou-se, para a aquisição de sinais de EMG, o sistema desenvolvido para
adquirir sinais de eletroencefalografia (EEG) e potencial evocado (D’AFFONSÊCA
NETTO et al., 2014; CEVALLOS-LARREA et al., 2014). Este sistema é composto por
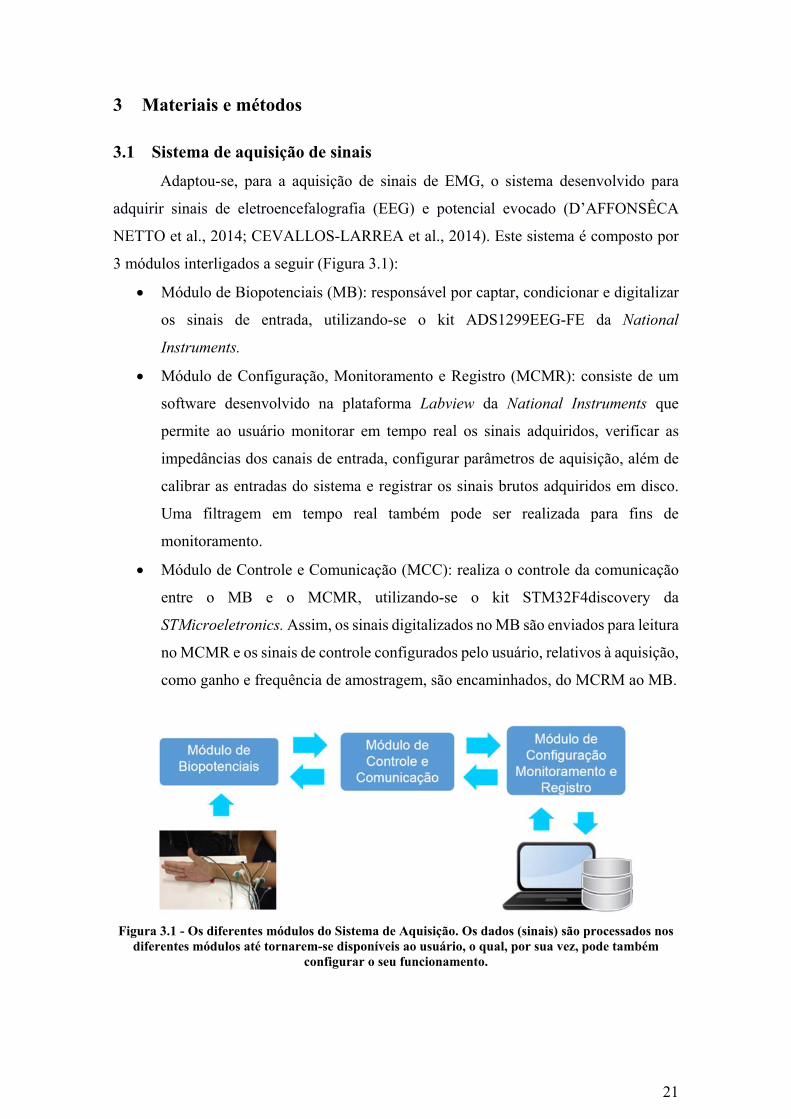
3 módulos interligados a seguir (Figura 3.1):
Módulo de Biopotenciais (MB): responsável por captar, condicionar e digitalizar
os sinais de entrada, utilizando-se o kit ADS1299EEG-FE da National
Instruments.
Módulo de Configuração, Monitoramento e Registro (MCMR): consiste de um
software desenvolvido na plataforma Labview da National Instruments que
permite ao usuário monitorar em tempo real os sinais adquiridos, verificar as
impedâncias dos canais de entrada, configurar parâmetros de aquisição, além de
calibrar as entradas do sistema e registrar os sinais brutos adquiridos em disco.
Uma filtragem em tempo real também pode ser realizada para fins de
monitoramento.
Módulo de Controle e Comunicação (MCC): realiza o controle da comunicação
entre o MB e o MCMR, utilizando-se o kit STM32F4discovery da
STMicroeletronics. Assim, os sinais digitalizados no MB são enviados para leitura
no MCMR e os sinais de controle configurados pelo usuário, relativos à aquisição,
como ganho e frequência de amostragem, são encaminhados, do MCRM ao MB.
Figura 3.1 - Os diferentes módulos do Sistema de Aquisição. Os dados (sinais) são processados nos
diferentes módulos até tornarem-se disponíveis ao usuário, o qual, por sua vez, pode também configurar o seu funcionamento.
22
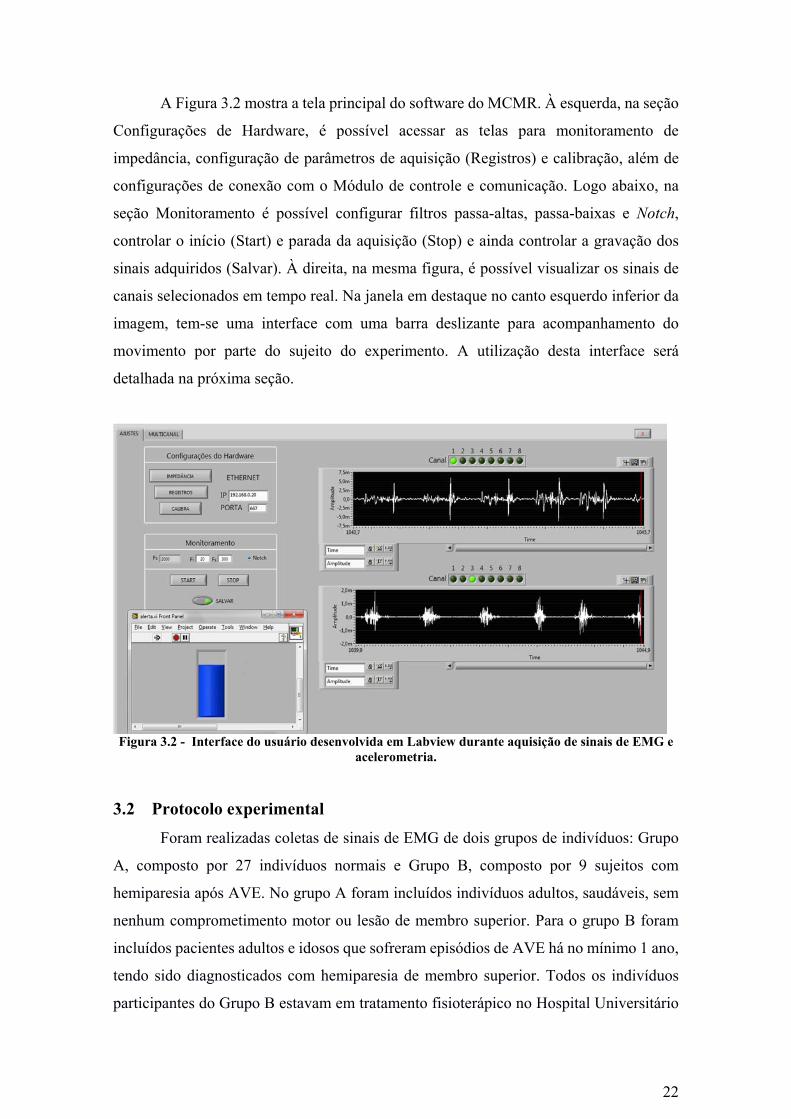
A Figura 3.2 mostra a tela principal do software do MCMR. À esquerda, na seção
Configurações de Hardware, é possível acessar as telas para monitoramento de
impedância, configuração de parâmetros de aquisição (Registros) e calibração, além de
configurações de conexão com o Módulo de controle e comunicação. Logo abaixo, na
seção Monitoramento é possível configurar filtros passa-altas, passa-baixas e Notch,
controlar o início (Start) e parada da aquisição (Stop) e ainda controlar a gravação dos
sinais adquiridos (Salvar). À direita, na mesma figura, é possível visualizar os sinais de
canais selecionados em tempo real. Na janela em destaque no canto esquerdo inferior da
imagem, tem-se uma interface com uma barra deslizante para acompanhamento do
movimento por parte do sujeito do experimento. A utilização desta interface será
detalhada na próxima seção.
Figura 3.2 - Interface do usuário desenvolvida em Labview durante aquisição de sinais de EMG e
acelerometria.
3.2 Protocolo experimental
Foram realizadas coletas de sinais de EMG de dois grupos de indivíduos: Grupo
A, composto por 27 indivíduos normais e Grupo B, composto por 9 sujeitos com
hemiparesia após AVE. No grupo A foram incluídos indivíduos adultos, saudáveis, sem
nenhum comprometimento motor ou lesão de membro superior. Para o grupo B foram
incluídos pacientes adultos e idosos que sofreram episódios de AVE há no mínimo 1 ano,
tendo sido diagnosticados com hemiparesia de membro superior. Todos os indivíduos
participantes do Grupo B estavam em tratamento fisioterápico no Hospital Universitário
23
Clementino Fraga Filho da UFRJ (HUCFF/UFRJ). A pesquisa foi devidamente aprovada
pelo Comitê de Ética e Pesquisa (CAAE: 44647715.1.0000.5257), tendo esta um caráter
voluntário. O protocolo experimental pode ser encontrado no Apêndice A. Os indivíduos
do Grupo A possuem média de idade de (34±13) anos e os indivíduos do Grupo B, (51
±16) anos. Os experimentos do Grupo A foram realizados no Laboratório de
Processamento de Imagens e Sinais (LAPIS/PEB/UFRJ) e os do Grupo B no Serviço de
Fisioterapia do HUCFF/UFRJ, ambos com ambiente controlado com temperatura de
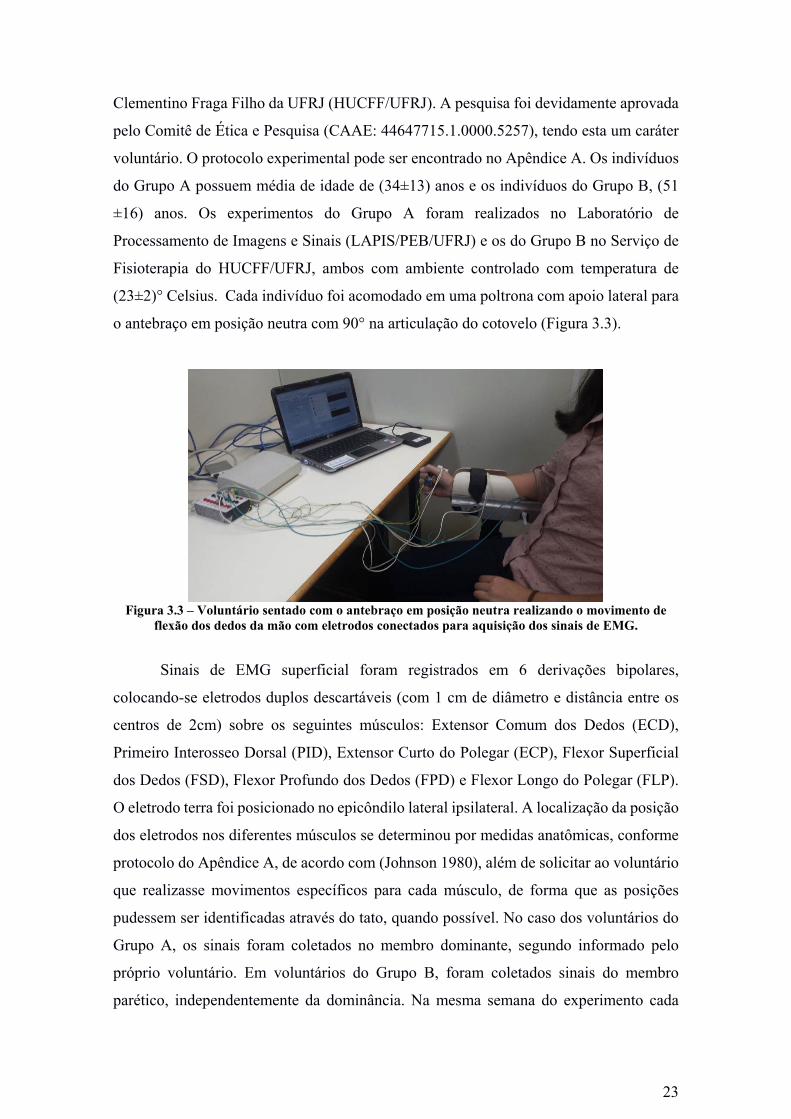
(23±2)° Celsius. Cada indivíduo foi acomodado em uma poltrona com apoio lateral para
o antebraço em posição neutra com 90° na articulação do cotovelo (Figura 3.3).
Figura 3.3 – Voluntário sentado com o antebraço em posição neutra realizando o movimento de
flexão dos dedos da mão com eletrodos conectados para aquisição dos sinais de EMG.
Sinais de EMG superficial foram registrados em 6 derivações bipolares,
colocando-se eletrodos duplos descartáveis (com 1 cm de diâmetro e distância entre os
centros de 2cm) sobre os seguintes músculos: Extensor Comum dos Dedos (ECD),
Primeiro Interosseo Dorsal (PID), Extensor Curto do Polegar (ECP), Flexor Superficial
dos Dedos (FSD), Flexor Profundo dos Dedos (FPD) e Flexor Longo do Polegar (FLP).
O eletrodo terra foi posicionado no epicôndilo lateral ipsilateral. A localização da posição
dos eletrodos nos diferentes músculos se determinou por medidas anatômicas, conforme
protocolo do Apêndice A, de acordo com (Johnson 1980), além de solicitar ao voluntário
que realizasse movimentos específicos para cada músculo, de forma que as posições
pudessem ser identificadas através do tato, quando possível. No caso dos voluntários do
Grupo A, os sinais foram coletados no membro dominante, segundo informado pelo
próprio voluntário. Em voluntários do Grupo B, foram coletados sinais do membro
parético, independentemente da dominância. Na mesma semana do experimento cada

24
paciente foi avaliado com base na escala de Fugl-Meyer (FMA) e os resultados foram
registrados. Além dos eletrodos, foi também colocado um acelerômetro (ADXL335 da
AnalogDevices) no dedo indicador do indivíduo para posterior identificação do início de
cada movimento.
Os indivíduos realizaram 3 seções. Cada seção consistiu em manter o braço
relaxado (repouso) por 5 segundos e logo após executar 10 repetições de extensão dos
dedos da mão e 10 repetições de flexão. Cada repetição iniciava-se em posição relaxada
(Figura 3.4 - intermediária), seguida da extensão (Figura 3.4 – superior) ou flexão (Figura
3.4 – inferior), para finalmente retornar à posição relaxada. Para a velocidade de execução
do movimento, o indivíduo teve que acompanhar uma barra deslizante apresentada em
um monitor (conforme janela na parte inferior esquerda da Figura 3.2). Assim, orientou-
se o voluntário para que realizasse o movimento gradual de abrir ou de fechar a mão (de
acordo com a seção correspondente) enquanto a barra deslizante estivesse subindo, e
relaxasse, de forma também gradual, quando a barra estivesse em movimento
descendente.
Figura 3.4 – Voluntário com os dedos estendidos (figura superior), relaxados (figura intermediária)
e flexionados (figura inferior).
Na primeira seção o indivíduo aprendeu a tarefa, de forma que os sinais de EMG
registrados não foram processados. Os sinais registrados na segunda seção foram
processados para se extrair características do EMG durante flexão, extensão, relaxamento
e repouso e estimar os parâmetros dos classificadores. Os sinais registrados durante a
25
terceira seção foram utilizados para simular uma classificação em tempo real e a partir
desta avaliar o desempenho do classificador.
Nesta dissertação, os termos extensão, flexão, abertura e fechamento se referirão
sempre aos respectivos movimentos dos dedos da mão, bem como o relaxamento e o
repouso serão relativos também a este segmento.
3.3 Processamento de sinais
Os sinais de EMG, adquiridos a uma taxa de amostragem de 2 kHz, das seções II
e III da coleta de sinais passaram por duas etapas em comum: pré-processamento e
extração de características (Figura 3.5).
Na etapa de pré-processamento, os sinais foram filtrados (direta e reversamente -
fase zero) offline com filtro Butterworth passa altas de segunda ordem na frequência de
20 Hz, e passa-baixas em 450 Hz. Também foram utilizados filtros Notch para atenuar o
ruído da rede elétrica, em 60 Hz e seus harmônicos ímpares até 300 Hz.
Na etapa seguinte foram extraídas características dos sinais de EMG. Para os
sinais da seção II, esta etapa dividiu-se em duas partes (Figura 3.5): (i) primeiro,
identificou-se os pontos de iniciação do movimento a partir do sinal do acelerômetro
(seção 3.3.1); (ii) então, encontrou-se, dentro de um determinado intervalo de tempo a
partir destes pontos, as características, com base na densidade espectral de potência (PSD)
do sinal de EMG. A partir destas características foram estimados os parâmetros do
classificador. Os parâmetros estimados dependem do tipo de classificador utilizado e
serão detalhados nas seções correspondentes (seções 3.3.4.1 e 3.3.4.2). Tais parâmetros
de classificação foram armazenados em memória para serem utilizados na simulação da
classificação em tempo real da seção III.
Na seção III, todo o processamento de sinais foi realizado para janelas de 100ms,
simulando a aplicação em “tempo real”. Assim, extraiu-se a característica e classificou-
se cada janela como pertencente a uma das classes: repouso, flexão, extensão e
relaxamento. Para tal, o procedimento de classificação dividiu-se em três partes (Figura
3.5): (i) classificação inicial entre extensão e flexão (TFE Bayesiano, seção 3.3.4.1, LDA
ou SVM, seção 3.3.4.2); em paralelo, (ii) identificação de ativação/desativação muscular
nos diferentes músculos com base no TFE (seção 3.3.3); e finalmente, (iii) por meio de
uma árvore de decisão (seção 3.3.5), obtenção da classificação final.
Em um sistema de tecnologia assistiva cada classe é associada a um comando que
pode ser enviado a um dispositivo externo ou software, executando a ação intencionada

26
pelo usuário. Esta etapa, porém, foge ao escopo deste projeto tendo sido adicionada ao
diagrama da Figura 3.5 apenas para facilitar o entendimento.
O desempenho do classificador foi avaliado estimando-se a sensibilidade,
especificidade e acurácia, tomando-se como referência de iniciação e finalização dos
movimentos os pontos identificados a partir do sinal do acelerômetro.
Figura 3.5 - Diagrama do processo de classificação do sinal de EMG
3.3.1 Identificação dos instantes de movimento pelo sinal de acelerometria
Uma informação muito importante tanto para a extração de características quanto
para posterior avaliação do desempenho do classificador, refere-se aos instantes de tempo
em que se iniciaram os movimentos executados. Esta estimativa foi realizada a partir dos
sinais do acelerômetro colocado no dedo indicador dos indivíduos. O sinal adquirido
corresponde ao eixo longitudinal ao dedo.
O método utilizado baseou-se em uma técnica desenvolvida no trabalho de Branco
(2015), acrescentando-se a estimação do instante de finalização do movimento, que pode
ser também interpretado como início de movimento de relaxamento. O sinal do
acelerômetro (amostrado a 2kHz) foi inicialmente filtrado com filtro passa-bandas de 1 a
10 Hz. Tomando-se a derivada do sinal filtrado, considera-se como início do movimento
o ponto mínimo anterior à primeira inclinação positiva do sinal da derivada (Branco
2015). De forma similar, a finalização do movimento é considerada como o ponto de
máximo posterior a uma inclinação negativa do sinal da derivada. A Figura 3.6 mostra
27
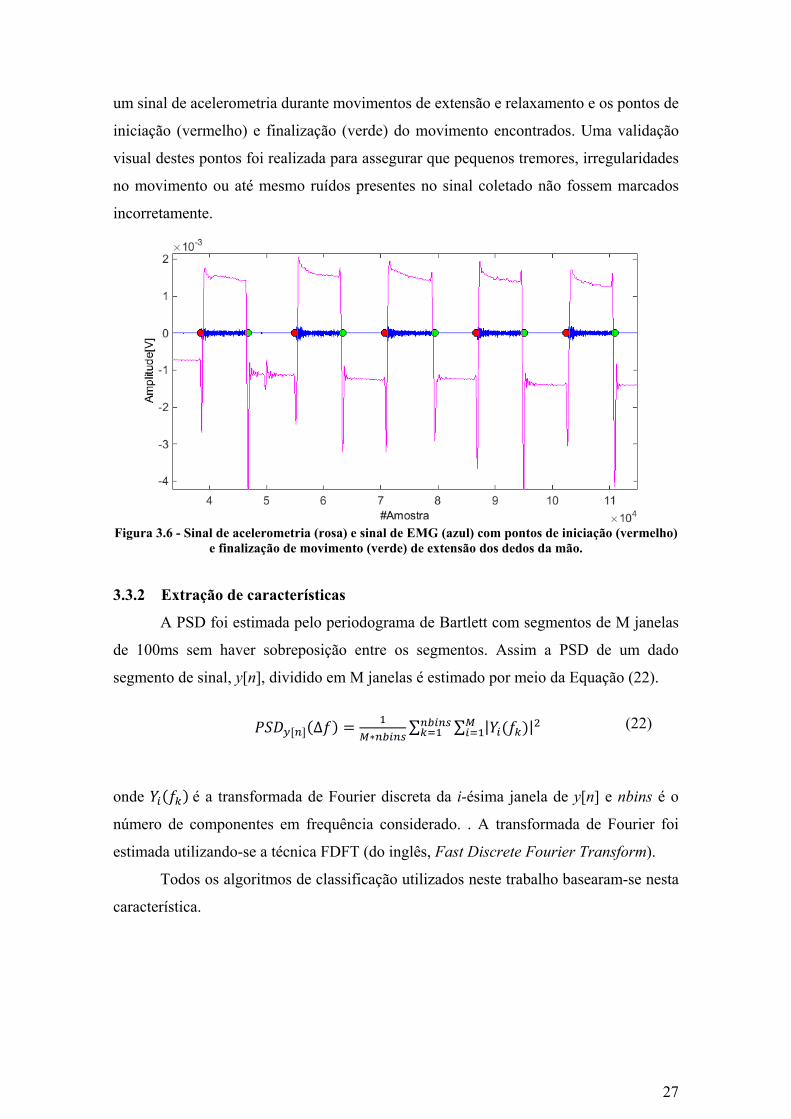
um sinal de acelerometria durante movimentos de extensão e relaxamento e os pontos de
iniciação (vermelho) e finalização (verde) do movimento encontrados. Uma validação
visual destes pontos foi realizada para assegurar que pequenos tremores, irregularidades
no movimento ou até mesmo ruídos presentes no sinal coletado não fossem marcados
incorretamente.
Figura 3.6 - Sinal de acelerometria (rosa) e sinal de EMG (azul) com pontos de iniciação (vermelho)
e finalização de movimento (verde) de extensão dos dedos da mão.
3.3.2 Extração de características
A PSD foi estimada pelo periodograma de Bartlett com segmentos de M janelas
de 100ms sem haver sobreposição entre os segmentos. Assim a PSD de um dado
segmento de sinal, y[n], dividido em M janelas é estimado por meio da Equação (22).
∆
∗∑ ∑ | | (22)
onde é a transformada de Fourier discreta da i-ésima janela de y[n] e nbins é o
número de componentes em frequência considerado. . A transformada de Fourier foi
estimada utilizando-se a técnica FDFT (do inglês, Fast Discrete Fourier Transform).
Todos os algoritmos de classificação utilizados neste trabalho basearam-se nesta
característica.
28
3.3.2.1 Determinação da faixa de frequência das características
extraídas para a classificação
A faixa de frequência considerada foi determinada a partir dos sinais de todos os
voluntários do Grupo A registrados na seção II do experimento. Estimaram-se os
espectros com base em sinais de EMG de dois músculos de referência: o Extensor comum
dos dedos (ECD) e o Flexor superficial dos dedos (FSD), durante cada movimento. A
seguir, foi realizado um teste estatístico de Wilcoxon (nível de significância de 5%),
comparando-se o espectro do sinal durante períodos com a mão em posição relaxada para
cada faixa de frequências com os espectros em cada caso a seguir: (i) músculo extensor
durante movimentos de extensão; (ii) musculo flexor durante movimentos de flexão; (iii)
músculo extensor durante movimentos de flexão; (iv) músculo flexor durante
movimentos de extensão. Com isso, procurou-se a faixa de frequências que atendesse ao
seguinte critério: possuir a maior parte de suas subfaixas com diferença significativa,
segundo o teste de Wilcoxon, quando se tratasse do músculo agonista ao movimento em
questão (casos i e iv) e sem diferença significativa quando se tratasse do musculo não
agonista (casos ii e iii).
Seguindo esta metodologia, foi selecionada a faixa de frequência de 80 a 100Hz
para todos os pares de músculos considerados.
3.3.3 Identificação de ativação e desativação muscular por canal com TFE
Na etapa de identificação de ativação/desativação muscular se aplicou o TFE em
segmentos subsequentes, ao longo do tempo, no sinal de EMG de cada canal pré-
processado, de modo a se detectar diferenças entre as PSDs dos segmentos corrente (L) e
imediatamente anterior (L-1). Assim, com base na equação fundamental do TFE
(Equação (8)), desenvolveu-se a Equação (23), a seguir:
∅ ∆
∑ ∑ | |
∑ ∑ | |
(23)
em que e são as transformadas de Fourier da i-ésima janela do sinal de
EMG pertencentes, respectivamente, ao segmento corrente, , e anterior, . O
valor de ∅ foi calculado a cada nova janela de 100ms e para a banda de frequência
∆ de nbins componentes. O algoritmo pode ser melhor visualizado pelo esquema
exemplo da Figura 3.7, em que se considera M= 4 para cada segmento.
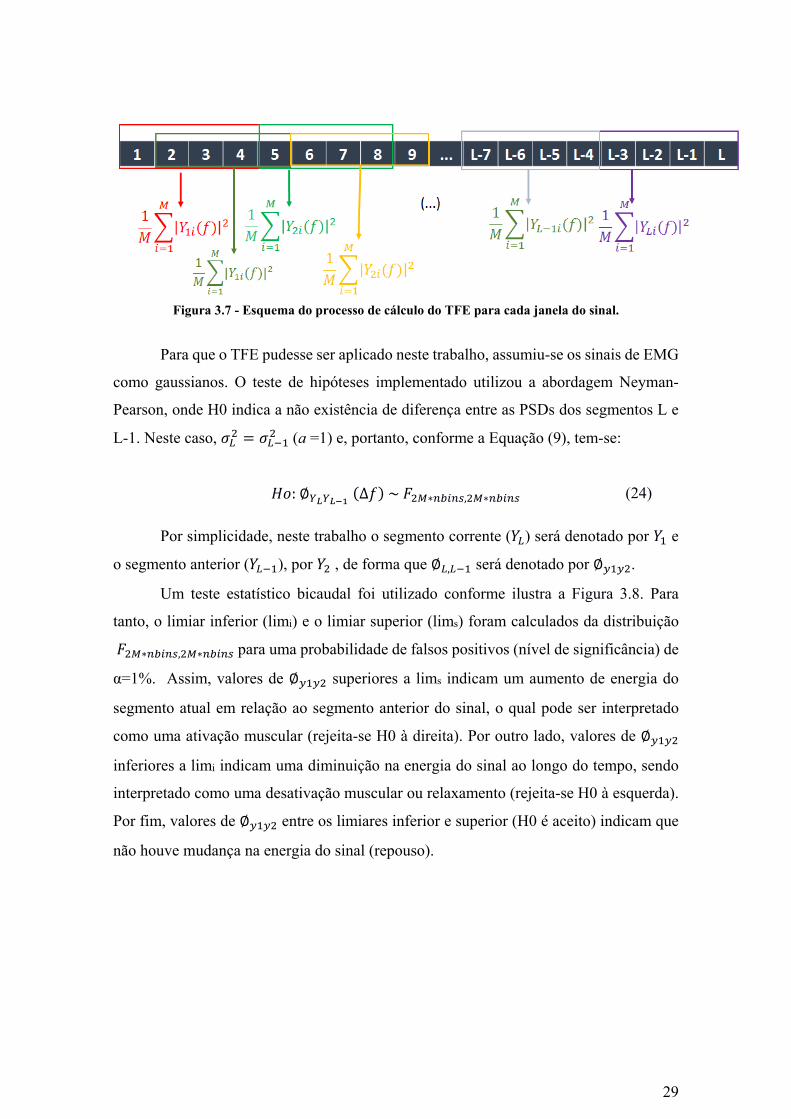
29
Figura 3.7 - Esquema do processo de cálculo do TFE para cada janela do sinal.
Para que o TFE pudesse ser aplicado neste trabalho, assumiu-se os sinais de EMG
como gaussianos. O teste de hipóteses implementado utilizou a abordagem Neyman-
Pearson, onde H0 indica a não existência de diferença entre as PSDs dos segmentos L e
L-1. Neste caso, (a =1) e, portanto, conforme a Equação (9), tem-se:
:∅ ∆ ~ ∗ , ∗ (24)
Por simplicidade, neste trabalho o segmento corrente ( ) será denotado por e
o segmento anterior ( ), por , de forma que ∅ , será denotado por ∅ .
Um teste estatístico bicaudal foi utilizado conforme ilustra a Figura 3.8. Para
tanto, o limiar inferior (limi) e o limiar superior (lims) foram calculados da distribuição
∗ , ∗ para uma probabilidade de falsos positivos (nível de significância) de
α=1%. Assim, valores de ∅ superiores a lims indicam um aumento de energia do
segmento atual em relação ao segmento anterior do sinal, o qual pode ser interpretado
como uma ativação muscular (rejeita-se H0 à direita). Por outro lado, valores de ∅
inferiores a limi indicam uma diminuição na energia do sinal ao longo do tempo, sendo
interpretado como uma desativação muscular ou relaxamento (rejeita-se H0 à esquerda).
Por fim, valores de ∅ entre os limiares inferior e superior (H0 é aceito) indicam que
não houve mudança na energia do sinal (repouso).

30
Figura 3.8- Esquema explicativo do teste estatístico bicaudal realizado.
Finalmente, a cada nova janela do sinal analisado é associado um valor conforme:
∅
1, ∅1, ∅
0, ∅
(25)
Portanto, ∅ assume o valor zero quando a H0 é aceita e os valores 1 e -1
quando H0 é rejeitado à direita e à esquerda, respectivamente.
3.3.4 Classificação inicial entre extensão e flexão
Duas classes foram consideradas, as quais serão abordadas neste texto como
classes C1 e C2. A classe C1 indica um indício de flexão e a classe C2, um indício de
extensão. Assim, os dados utilizados para treinamento caracterizando a classe C1 foram
retirados dos sinais coletados durante movimentos de extensão e os dados para a classe
C2, de sinais durante movimentos de flexão, durante a segunda seção do experimento.
As características utilizadas para esta etapa de classificação basearam-se nas
mesmas características aplicadas na etapa de identificação de ativação e desativação
muscular (PSD). Portanto, a faixa de frequência utilizada foi também de 80 a 100Hz,
conforme descrito na seção 3.3.2.1. As técnicas de classificação utilizadas foram o Teste
Espectral F bayesiano, LDA e SVM.
31
3.3.4.1 Classificador com TFE bayesiano
Sabe-se que diferentes músculos são recrutados para a execução de cada tipo de
movimento com maior ou menor energia dependendo dos seus papéis nas execuções dos
mesmos. Com base nisto, levantou-se a hipótese de que as razões entre as energias de
sinais de pares de canais, em bandas de frequências específicas, seguem diferentes
distribuições dependendo do movimento. Quando o par de músculos em questão são um
par de agonista-antagonista a um mesmo movimento, tais razões indicam também o nível
de co-contração na articulação em questão, podendo ser um parâmetro útil na avaliação e
monitoramento da recuperação funcional de pacientes com membros paréticos.
De forma similar à equação (23), a razão utilizada baseou-se na seguinte equação:
∅ ∆
∑ ∑ | |
∑ ∑ | |
(26)
na qual e são as transformadas de Fourier de e , os quais são
segmentos de sinais de EMG coletados em dois diferentes músculos, durante movimentos
de extensão e de flexão dos dedos da mão.
Se considerarmos que os trechos dos sinais de EMG são gaussianos, na equação
(26),∅ será dado por uma distribuição F com fator de escalonamento a (ver equação
(9)). Porém, neste caso, dependendo de quais os músculos envolvidos e qual o tipo de
movimento, o fator de escalonamento a poderá assumir diferentes valores. Assim, foi
proposto neste trabalho utilizar como base para a classificação as estimativas das razões
entre as variâncias dos sinais de certos pares de músculos em bandas de frequência
especificas, em janelas de tempo em que se sabe da ocorrência de cada tipo de movimento.
Os pares foram escolhidos de forma que estes tivessem diferentes contribuições na flexão
ou extensão. Em resumo, diferentes valores de a relativos às razões entre diferentes pares
de músculos podem ser estimados para cada tipo de movimento.
As estimativas de a para a flexão (aflex) e extensão (aext), para cada par de
músculos, foram obtidas pelas médias de 3 valores consecutivos de ∅ ∆ nos 10
movimentos da seção II (no total média de 30 valores de ∅ ∆ , a partir dos instantes
em que se iniciaram os movimentos (identificados através do sinal de acelerometria).
32
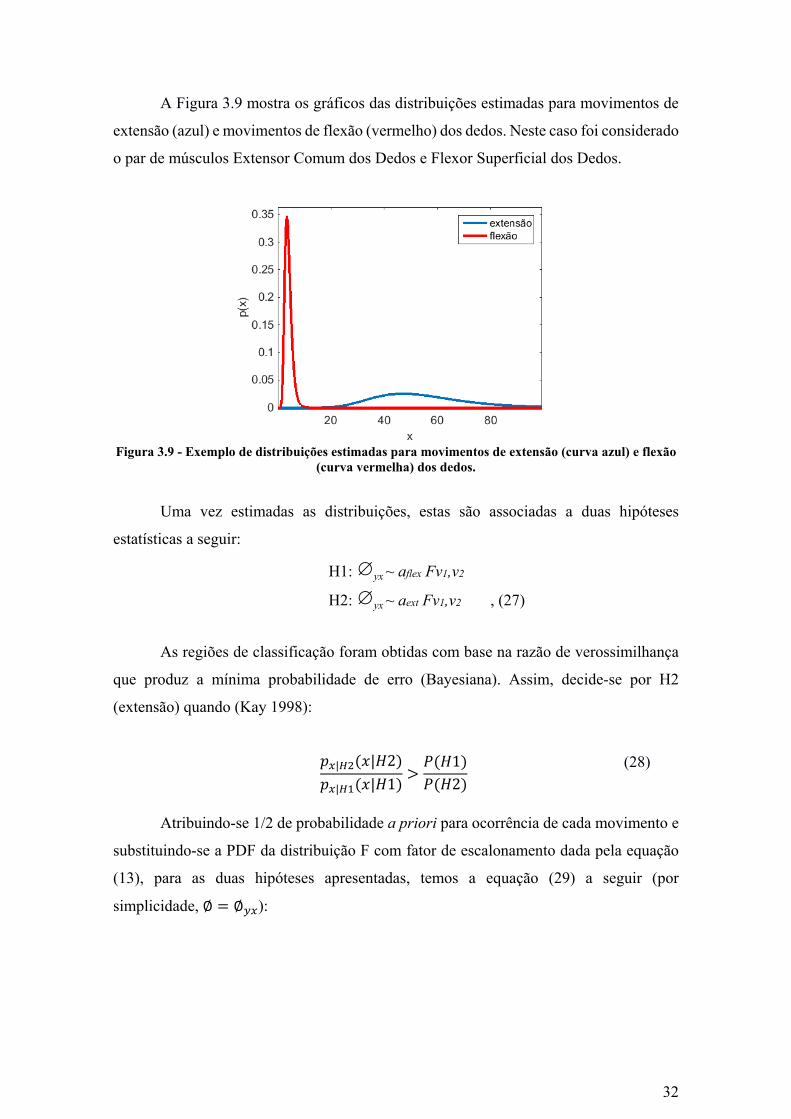
A Figura 3.9 mostra os gráficos das distribuições estimadas para movimentos de
extensão (azul) e movimentos de flexão (vermelho) dos dedos. Neste caso foi considerado
o par de músculos Extensor Comum dos Dedos e Flexor Superficial dos Dedos.
Figura 3.9 - Exemplo de distribuições estimadas para movimentos de extensão (curva azul) e flexão
(curva vermelha) dos dedos.
Uma vez estimadas as distribuições, estas são associadas a duas hipóteses
estatísticas a seguir:
H1: yx ~ aflex Fv1,v2
H2: yx ~ aext Fv1,v2 , (27)
As regiões de classificação foram obtidas com base na razão de verossimilhança
que produz a mínima probabilidade de erro (Bayesiana). Assim, decide-se por H2
(extensão) quando (Kay 1998):
| | 2
| | 112
(28)
Atribuindo-se 1/2 de probabilidade a priori para ocorrência de cada movimento e
substituindo-se a PDF da distribuição F com fator de escalonamento dada pela equação
(13), para as duas hipóteses apresentadas, temos a equação (29) a seguir (por
simplicidade, ∅ ∅ ):

33
∅
,∅
∅
,∅
1
(29)
Isolando-se ∅ no lado esquerdo da equação, decide-se por H2 se a condição
dada por (30) for satisfeita:
1
(30)
onde
Assim, com base no valor de em uma dada janela do sinal de EMG, define-
se a variável C a seguir:
∅ 1, ∅ lim; ã
2, ∅ lim; ã
(31)
O desempenho deste classificador foi avaliado teoricamente por meio da
probabilidade de erro para diferentes valores de aflex e aext.
3.3.4.2 Classificação com LDA e com SVM
Duas outras técnicas de classificação, LDA e SVM, foram utilizadas neste
trabalho para servirem como base de comparação na classificação inicial entre extensão
e flexão. As energias dos sinais em bandas de frequências específicas, conforme equação
(22), de segmentos do sinal em que ocorreu o movimento – determinados como descrito
na seção 3.3.1 - para cada canal considerado, foram utilizadas como características de
entrada dos classificadores LDA e SVM. O Kernel escolhido para a classificação com
SVM foi o Gaussiano.
3.3.5 Classificação final (Árvore de decisão)
Ao longo da aquisição de sinais o classificador final teve que distinguir para cada
janela, 4 classes de eventos: repouso, extensão, flexão e relaxamento. Janelas de tempo
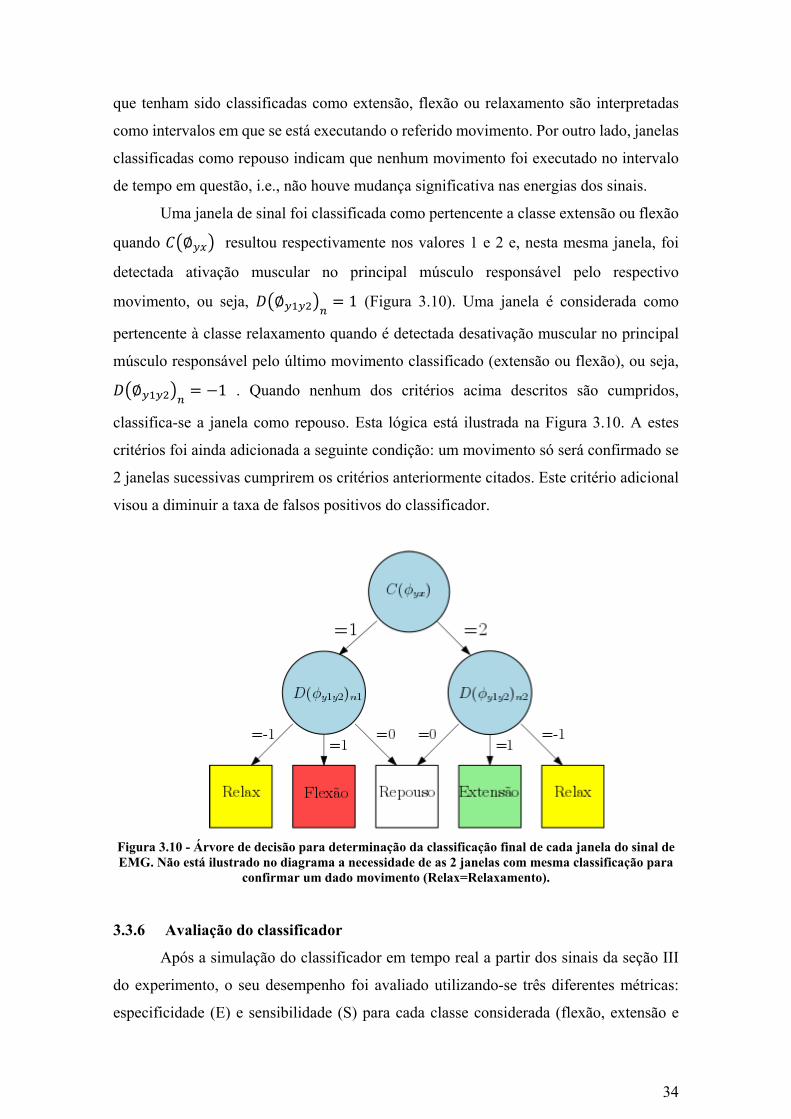
34
que tenham sido classificadas como extensão, flexão ou relaxamento são interpretadas
como intervalos em que se está executando o referido movimento. Por outro lado, janelas
classificadas como repouso indicam que nenhum movimento foi executado no intervalo
de tempo em questão, i.e., não houve mudança significativa nas energias dos sinais.
Uma janela de sinal foi classificada como pertencente a classe extensão ou flexão
quando ∅ resultou respectivamente nos valores 1 e 2 e, nesta mesma janela, foi
detectada ativação muscular no principal músculo responsável pelo respectivo
movimento, ou seja, ∅ 1 (Figura 3.10). Uma janela é considerada como
pertencente à classe relaxamento quando é detectada desativação muscular no principal
músculo responsável pelo último movimento classificado (extensão ou flexão), ou seja,
∅ 1 . Quando nenhum dos critérios acima descritos são cumpridos,
classifica-se a janela como repouso. Esta lógica está ilustrada na Figura 3.10. A estes
critérios foi ainda adicionada a seguinte condição: um movimento só será confirmado se
2 janelas sucessivas cumprirem os critérios anteriormente citados. Este critério adicional
visou a diminuir a taxa de falsos positivos do classificador.
Figura 3.10 - Árvore de decisão para determinação da classificação final de cada janela do sinal de EMG. Não está ilustrado no diagrama a necessidade de as 2 janelas com mesma classificação para
confirmar um dado movimento (Relax=Relaxamento).
3.3.6 Avaliação do classificador
Após a simulação do classificador em tempo real a partir dos sinais da seção III
do experimento, o seu desempenho foi avaliado utilizando-se três diferentes métricas:
especificidade (E) e sensibilidade (S) para cada classe considerada (flexão, extensão e
35
relaxamento), além da acurácia global (A) (Zhang et al. 2013). O cálculo destas métricas
é realizado com base nas equações (32), (33) e (34) a seguir:
(32)
(33)
(34)
VP representa o número de verdadeiros positivos (janelas de uma determinada
classe que foram corretamente classificadas como pertencentes a tal classe), VN
representa o número de verdadeiros negativos (janelas que não pertencem a determinada
classe corretamente classificadas como não pertencentes a tal classe), FP representa o
número de falsos positivos ( janelas que não pertencem a determinada classe classificadas
incorretamente como pertencendo à mesma) e FN é o número de falsos negativos (janelas
que pertencem a uma determinada classe mas que não foram classificadas como
pertencentes à mesma).
Os sinais de EMG da seção III foram separados em trechos de: (a) movimentos de
flexão, (b) movimentos de extensão, os quais consistem da primeira metade dos trechos
delimitados pelos pontos de iniciação e finalização do movimento, indicados pelo
acelerômetro, quando executado o respectivo movimento; (c) relaxamento, consistindo
da primeira metade dos trechos entre os pontos de finalização de um movimento e
inicialização do movimento seguinte e (d) repouso, consistindo de todos os trechos
restantes do sinal. Assim, janelas classificadas, por exemplo, como relaxamento e que
estejam dentro do trecho de relaxamento segundo a separação realizada, foram
consideradas verdadeiros positivos. O mesmo é aplicado às classificações de extensão,
flexão e repouso. Janelas que estejam fora do respectivo trecho verdadeiro são
computadas como falsos positivos para a classe à qual foram associadas.
Cada tipo de classificador foi simulado para 3 diferentes pares de músculos:
ECD/FSD; ECP/FLP e ECD/FPD, os quais representam pares de músculos
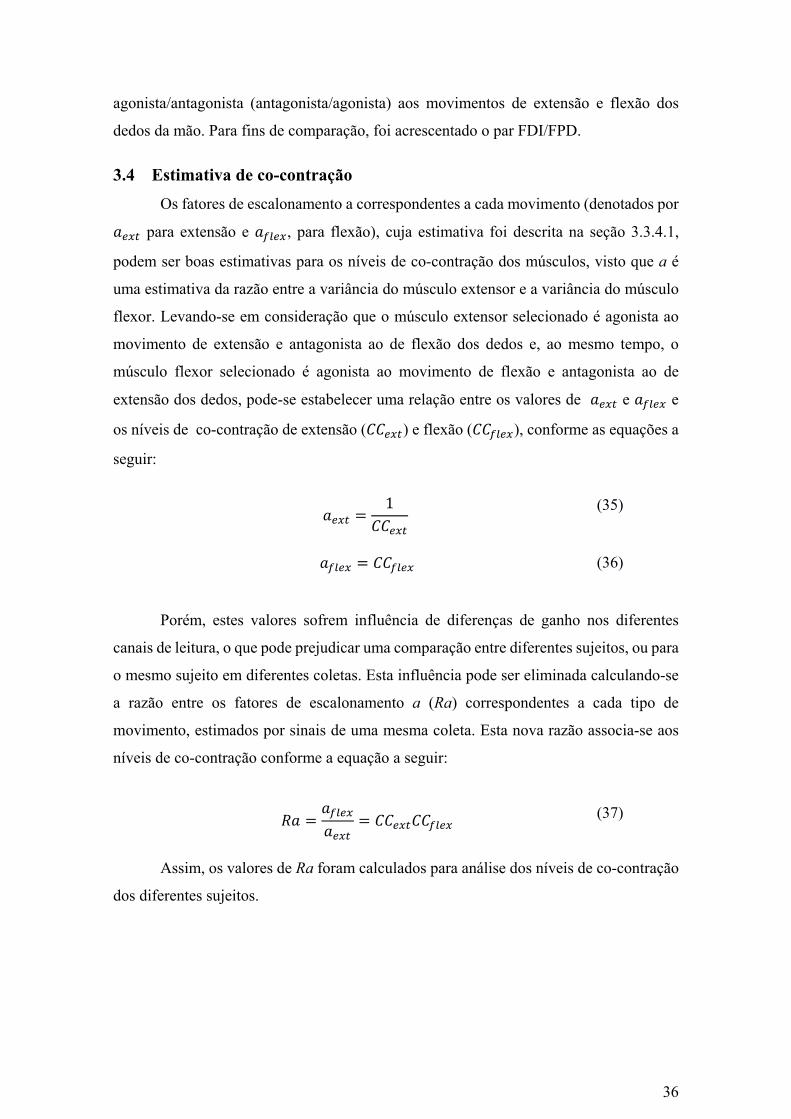
36
agonista/antagonista (antagonista/agonista) aos movimentos de extensão e flexão dos
dedos da mão. Para fins de comparação, foi acrescentado o par FDI/FPD.
3.4 Estimativa de co-contração
Os fatores de escalonamento a correspondentes a cada movimento (denotados por
para extensão e , para flexão), cuja estimativa foi descrita na seção 3.3.4.1,
podem ser boas estimativas para os níveis de co-contração dos músculos, visto que a é
uma estimativa da razão entre a variância do músculo extensor e a variância do músculo
flexor. Levando-se em consideração que o músculo extensor selecionado é agonista ao
movimento de extensão e antagonista ao de flexão dos dedos e, ao mesmo tempo, o
músculo flexor selecionado é agonista ao movimento de flexão e antagonista ao de
extensão dos dedos, pode-se estabelecer uma relação entre os valores de e e
os níveis de co-contração de extensão ( ) e flexão ( ), conforme as equações a
seguir:
1
(35)
(36)
Porém, estes valores sofrem influência de diferenças de ganho nos diferentes
canais de leitura, o que pode prejudicar uma comparação entre diferentes sujeitos, ou para
o mesmo sujeito em diferentes coletas. Esta influência pode ser eliminada calculando-se
a razão entre os fatores de escalonamento a (Ra) correspondentes a cada tipo de
movimento, estimados por sinais de uma mesma coleta. Esta nova razão associa-se aos
níveis de co-contração conforme a equação a seguir:
(37)
Assim, os valores de Ra foram calculados para análise dos níveis de co-contração
dos diferentes sujeitos.
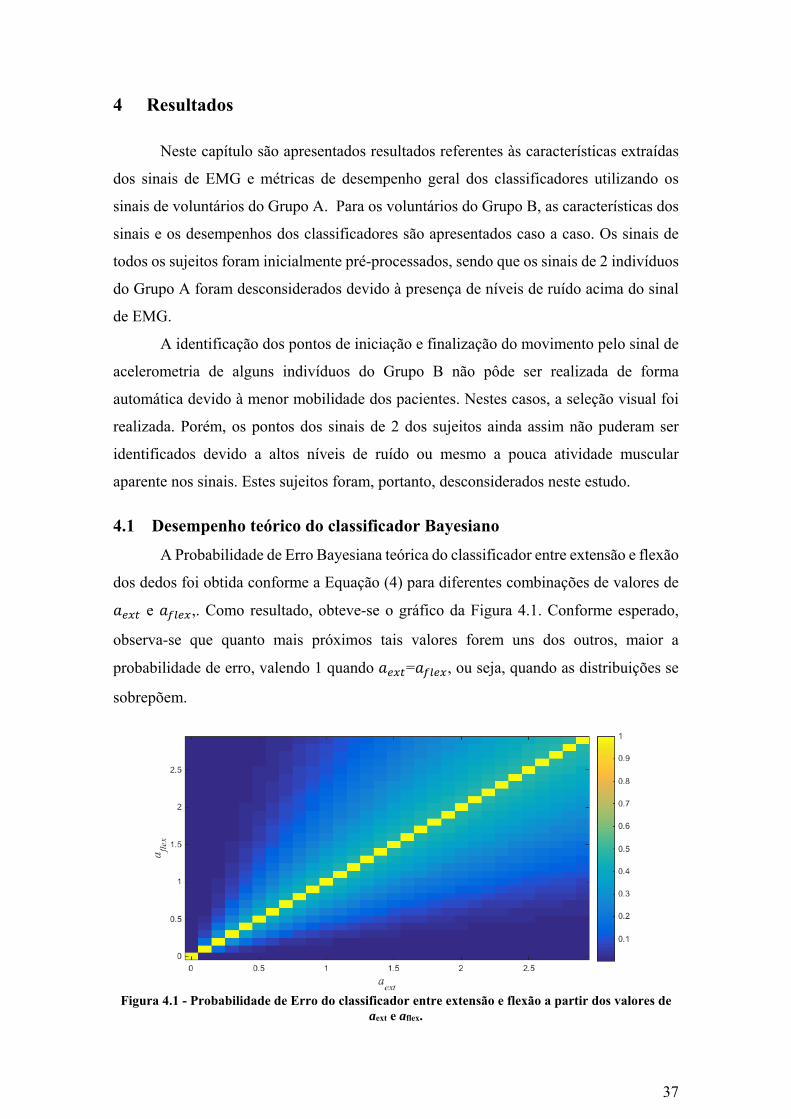
37
4 Resultados
Neste capítulo são apresentados resultados referentes às características extraídas
dos sinais de EMG e métricas de desempenho geral dos classificadores utilizando os
sinais de voluntários do Grupo A. Para os voluntários do Grupo B, as características dos
sinais e os desempenhos dos classificadores são apresentados caso a caso. Os sinais de
todos os sujeitos foram inicialmente pré-processados, sendo que os sinais de 2 indivíduos
do Grupo A foram desconsiderados devido à presença de níveis de ruído acima do sinal
de EMG.
A identificação dos pontos de iniciação e finalização do movimento pelo sinal de
acelerometria de alguns indivíduos do Grupo B não pôde ser realizada de forma
automática devido à menor mobilidade dos pacientes. Nestes casos, a seleção visual foi
realizada. Porém, os pontos dos sinais de 2 dos sujeitos ainda assim não puderam ser
identificados devido a altos níveis de ruído ou mesmo a pouca atividade muscular
aparente nos sinais. Estes sujeitos foram, portanto, desconsiderados neste estudo.
4.1 Desempenho teórico do classificador Bayesiano
A Probabilidade de Erro Bayesiana teórica do classificador entre extensão e flexão
dos dedos foi obtida conforme a Equação (4) para diferentes combinações de valores de
e ,. Como resultado, obteve-se o gráfico da Figura 4.1. Conforme esperado,
observa-se que quanto mais próximos tais valores forem uns dos outros, maior a
probabilidade de erro, valendo 1 quando = , ou seja, quando as distribuições se
sobrepõem.
Figura 4.1 - Probabilidade de Erro do classificador entre extensão e flexão a partir dos valores de
aext e aflex.
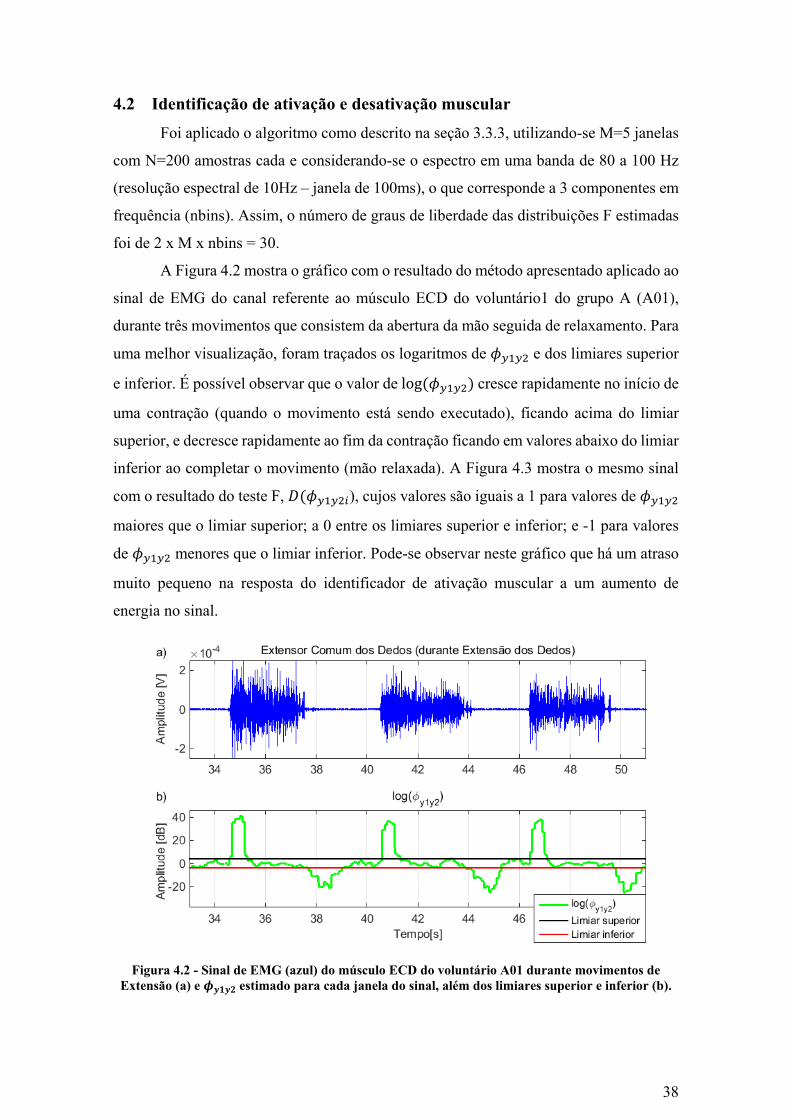
38
4.2 Identificação de ativação e desativação muscular
Foi aplicado o algoritmo como descrito na seção 3.3.3, utilizando-se M=5 janelas
com N=200 amostras cada e considerando-se o espectro em uma banda de 80 a 100 Hz
(resolução espectral de 10Hz – janela de 100ms), o que corresponde a 3 componentes em
frequência (nbins). Assim, o número de graus de liberdade das distribuições F estimadas
foi de 2 x M x nbins = 30.
A Figura 4.2 mostra o gráfico com o resultado do método apresentado aplicado ao
sinal de EMG do canal referente ao músculo ECD do voluntário1 do grupo A (A01),
durante três movimentos que consistem da abertura da mão seguida de relaxamento. Para
uma melhor visualização, foram traçados os logaritmos de e dos limiares superior
e inferior. É possível observar que o valor de log cresce rapidamente no início de
uma contração (quando o movimento está sendo executado), ficando acima do limiar
superior, e decresce rapidamente ao fim da contração ficando em valores abaixo do limiar
inferior ao completar o movimento (mão relaxada). A Figura 4.3 mostra o mesmo sinal
com o resultado do teste F, ), cujos valores são iguais a 1 para valores de
maiores que o limiar superior; a 0 entre os limiares superior e inferior; e -1 para valores
de menores que o limiar inferior. Pode-se observar neste gráfico que há um atraso
muito pequeno na resposta do identificador de ativação muscular a um aumento de
energia no sinal.
Figura 4.2 - Sinal de EMG (azul) do músculo ECD do voluntário A01 durante movimentos de Extensão (a) e estimado para cada janela do sinal, além dos limiares superior e inferior (b).
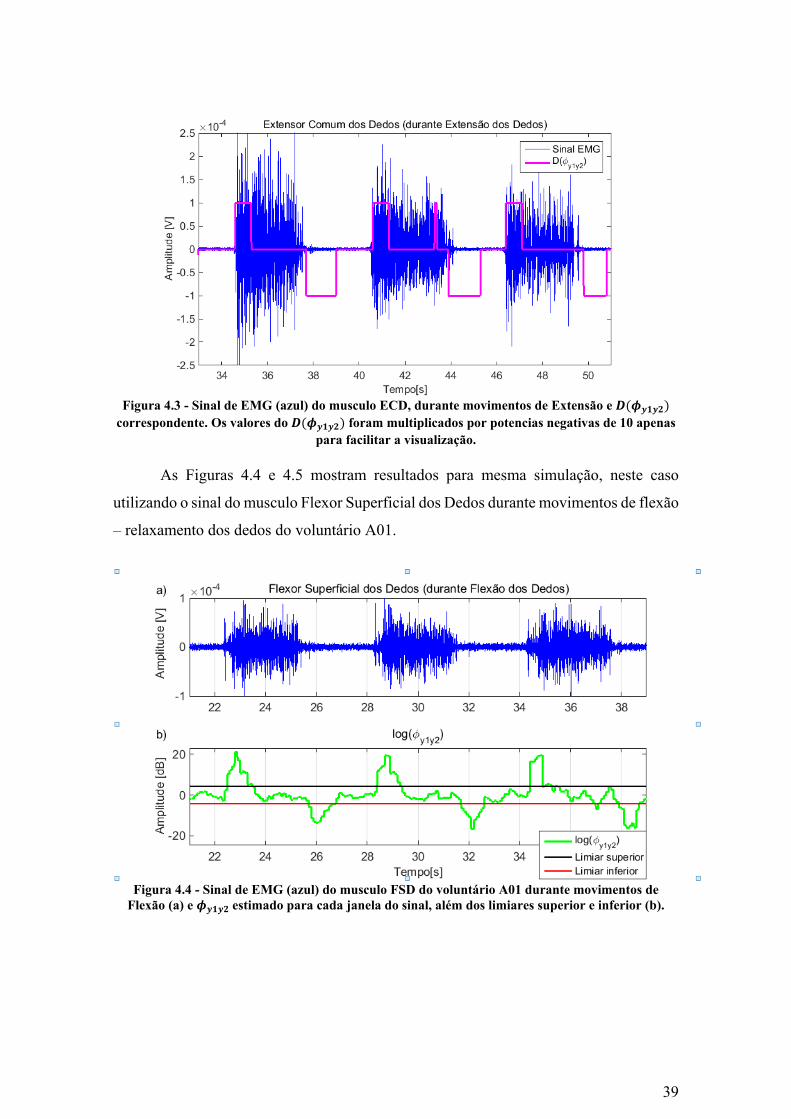
39
Figura 4.3 - Sinal de EMG (azul) do musculo ECD, durante movimentos de Extensão e
correspondente. Os valores do foram multiplicados por potencias negativas de 10 apenas para facilitar a visualização.
As Figuras 4.4 e 4.5 mostram resultados para mesma simulação, neste caso
utilizando o sinal do musculo Flexor Superficial dos Dedos durante movimentos de flexão
– relaxamento dos dedos do voluntário A01.
Figura 4.4 - Sinal de EMG (azul) do musculo FSD do voluntário A01 durante movimentos de
Flexão (a) e estimado para cada janela do sinal, além dos limiares superior e inferior (b).
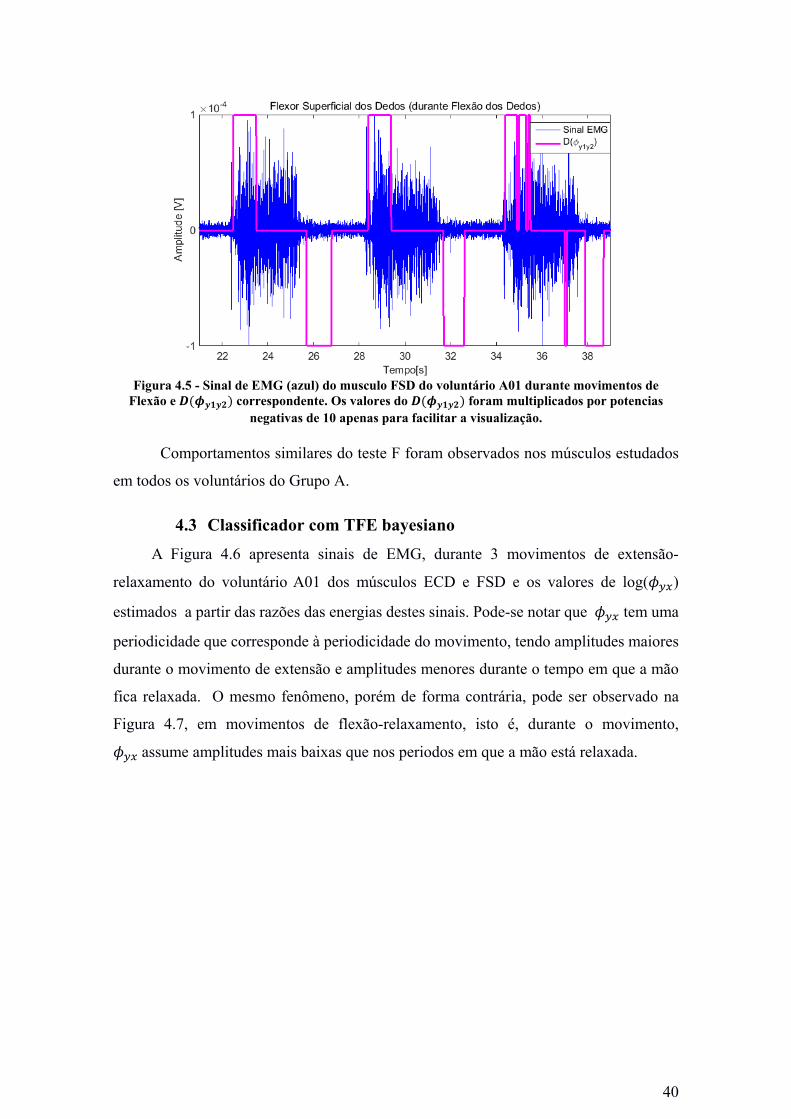
40
Figura 4.5 - Sinal de EMG (azul) do musculo FSD do voluntário A01 durante movimentos de
Flexão e correspondente. Os valores do foram multiplicados por potencias negativas de 10 apenas para facilitar a visualização.
Comportamentos similares do teste F foram observados nos músculos estudados
em todos os voluntários do Grupo A.
4.3 Classificador com TFE bayesiano
A Figura 4.6 apresenta sinais de EMG, durante 3 movimentos de extensão-
relaxamento do voluntário A01 dos músculos ECD e FSD e os valores de log( )
estimados a partir das razões das energias destes sinais. Pode-se notar que tem uma
periodicidade que corresponde à periodicidade do movimento, tendo amplitudes maiores
durante o movimento de extensão e amplitudes menores durante o tempo em que a mão
fica relaxada. O mesmo fenômeno, porém de forma contrária, pode ser observado na
Figura 4.7, em movimentos de flexão-relaxamento, isto é, durante o movimento,
assume amplitudes mais baixas que nos periodos em que a mão está relaxada.
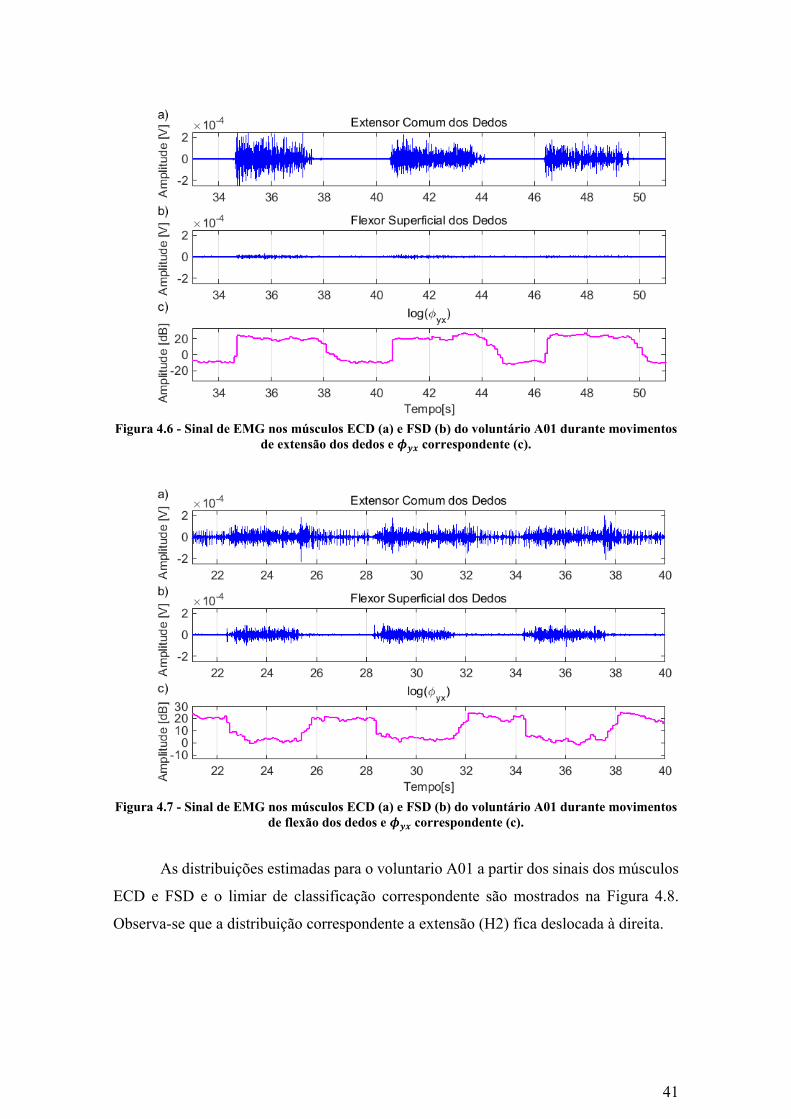
41
Figura 4.6 - Sinal de EMG nos músculos ECD (a) e FSD (b) do voluntário A01 durante movimentos
de extensão dos dedos e correspondente (c).
Figura 4.7 - Sinal de EMG nos músculos ECD (a) e FSD (b) do voluntário A01 durante movimentos
de flexão dos dedos e correspondente (c).
As distribuições estimadas para o voluntario A01 a partir dos sinais dos músculos
ECD e FSD e o limiar de classificação correspondente são mostrados na Figura 4.8.
Observa-se que a distribuição correspondente a extensão (H2) fica deslocada à direita.
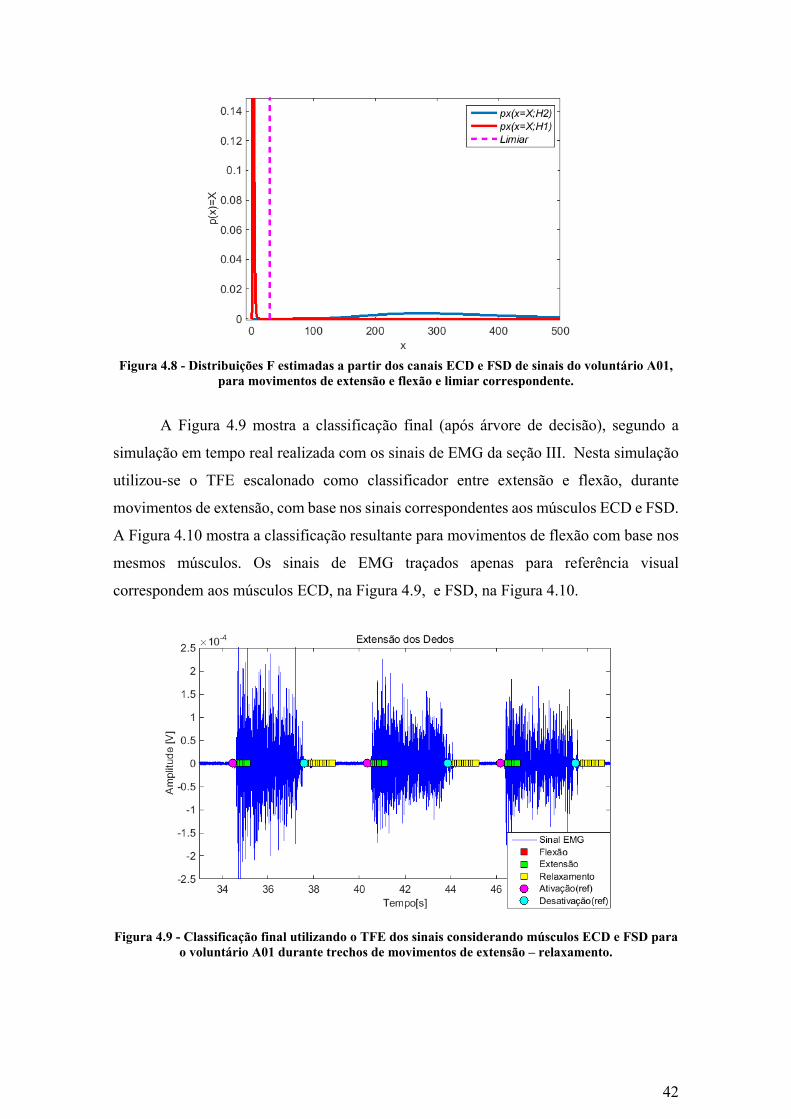
42
Figura 4.8 - Distribuições F estimadas a partir dos canais ECD e FSD de sinais do voluntário A01,
para movimentos de extensão e flexão e limiar correspondente.
A Figura 4.9 mostra a classificação final (após árvore de decisão), segundo a
simulação em tempo real realizada com os sinais de EMG da seção III. Nesta simulação
utilizou-se o TFE escalonado como classificador entre extensão e flexão, durante
movimentos de extensão, com base nos sinais correspondentes aos músculos ECD e FSD.
A Figura 4.10 mostra a classificação resultante para movimentos de flexão com base nos
mesmos músculos. Os sinais de EMG traçados apenas para referência visual
correspondem aos músculos ECD, na Figura 4.9, e FSD, na Figura 4.10.
Figura 4.9 - Classificação final utilizando o TFE dos sinais considerando músculos ECD e FSD para o voluntário A01 durante trechos de movimentos de extensão – relaxamento.
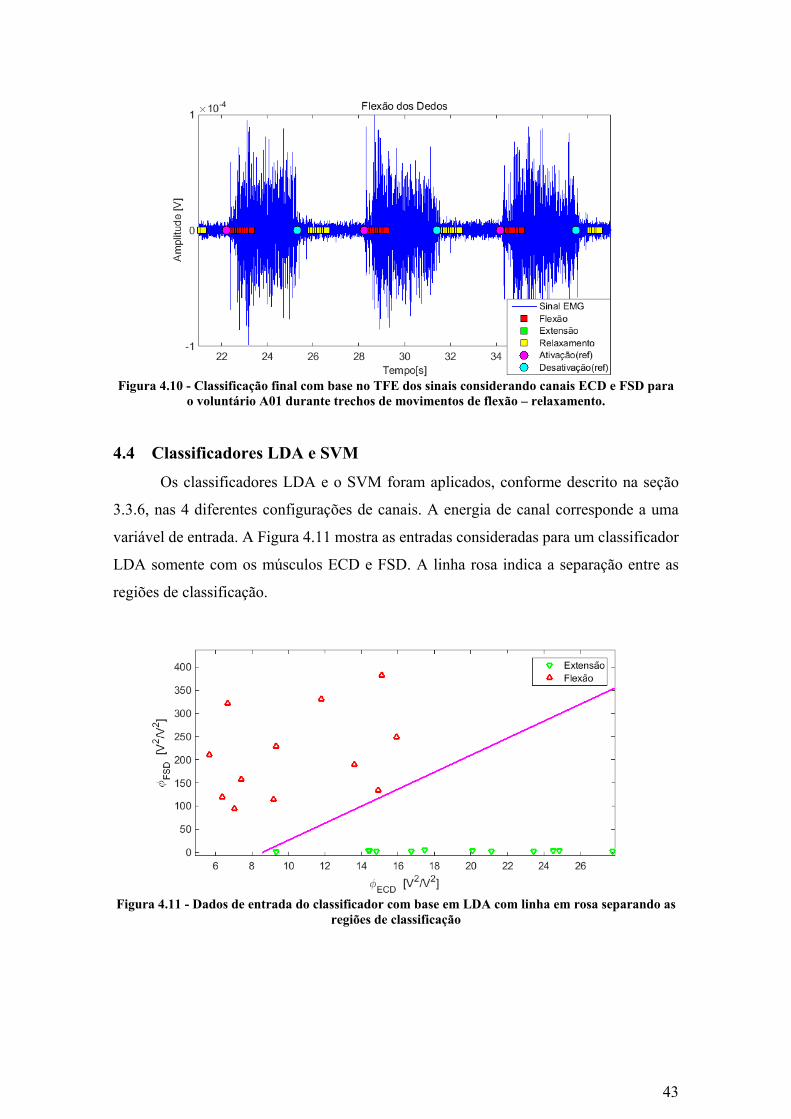
43
Figura 4.10 - Classificação final com base no TFE dos sinais considerando canais ECD e FSD para
o voluntário A01 durante trechos de movimentos de flexão – relaxamento.
4.4 Classificadores LDA e SVM
Os classificadores LDA e o SVM foram aplicados, conforme descrito na seção
3.3.6, nas 4 diferentes configurações de canais. A energia de canal corresponde a uma
variável de entrada. A Figura 4.11 mostra as entradas consideradas para um classificador
LDA somente com os músculos ECD e FSD. A linha rosa indica a separação entre as
regiões de classificação.
Figura 4.11 - Dados de entrada do classificador com base em LDA com linha em rosa separando as
regiões de classificação
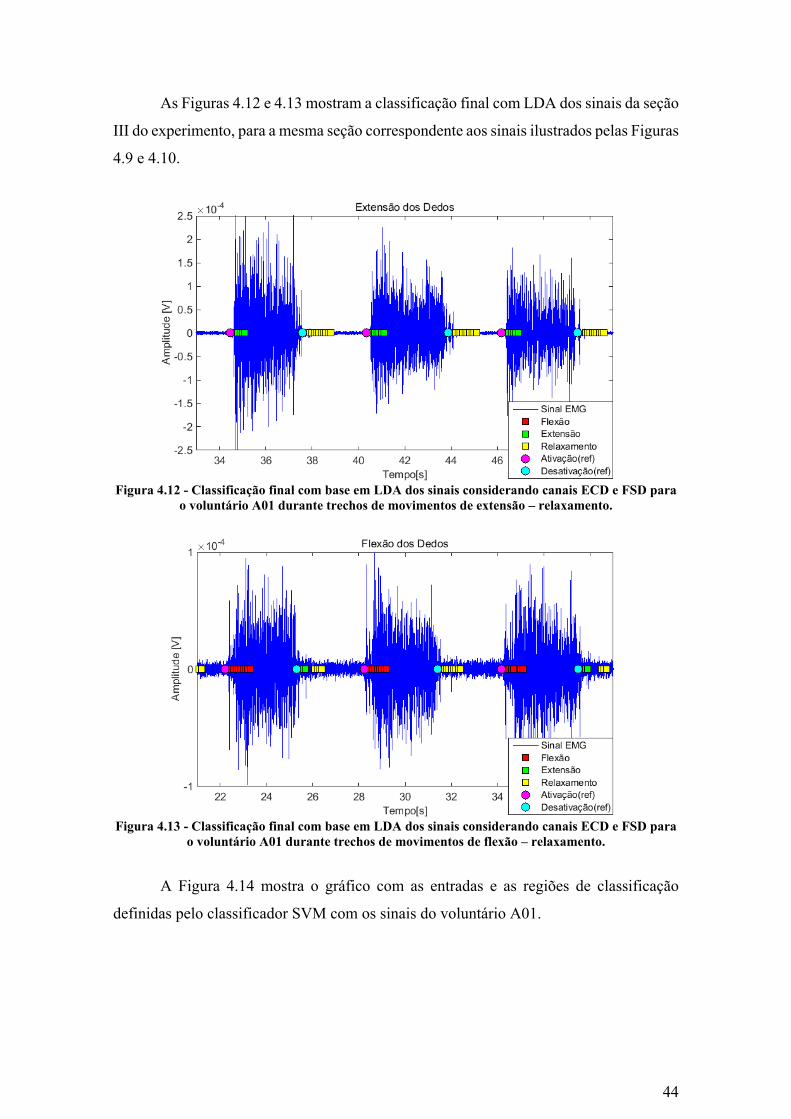
44
As Figuras 4.12 e 4.13 mostram a classificação final com LDA dos sinais da seção
III do experimento, para a mesma seção correspondente aos sinais ilustrados pelas Figuras
4.9 e 4.10.
Figura 4.12 - Classificação final com base em LDA dos sinais considerando canais ECD e FSD para
o voluntário A01 durante trechos de movimentos de extensão – relaxamento.
Figura 4.13 - Classificação final com base em LDA dos sinais considerando canais ECD e FSD para
o voluntário A01 durante trechos de movimentos de flexão – relaxamento.
A Figura 4.14 mostra o gráfico com as entradas e as regiões de classificação
definidas pelo classificador SVM com os sinais do voluntário A01.
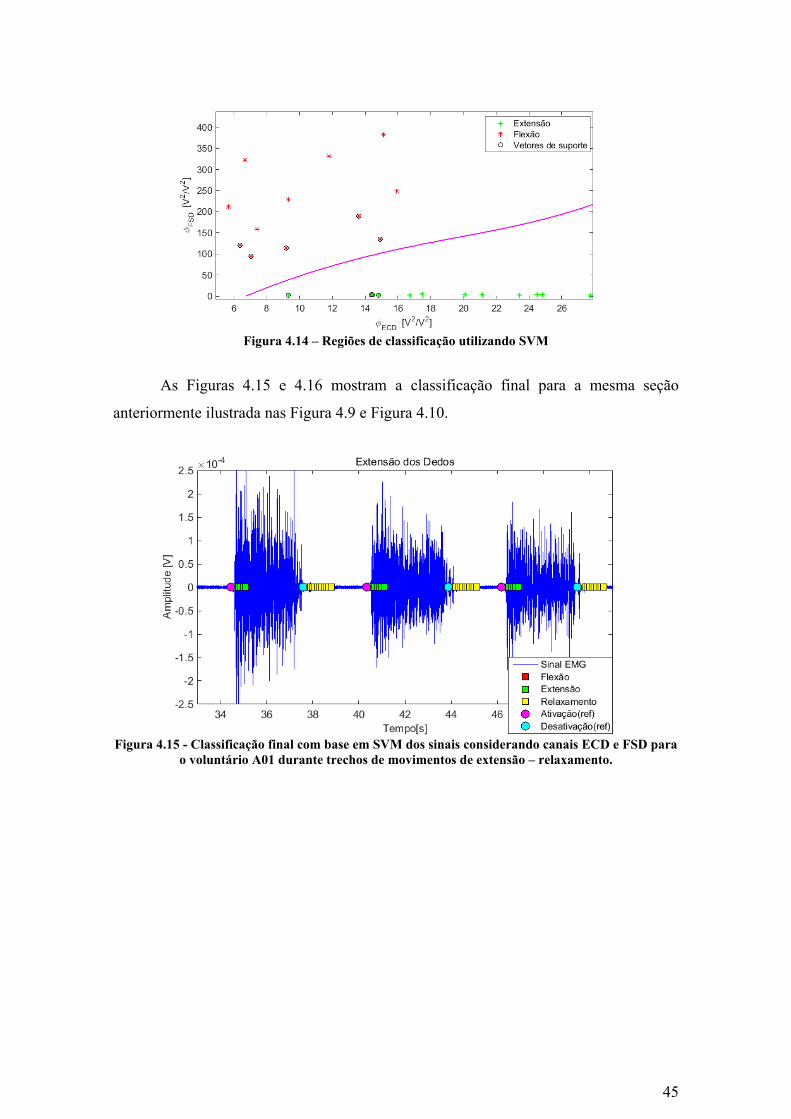
45
Figura 4.14 – Regiões de classificação utilizando SVM
As Figuras 4.15 e 4.16 mostram a classificação final para a mesma seção
anteriormente ilustrada nas Figura 4.9 e Figura 4.10.
Figura 4.15 - Classificação final com base em SVM dos sinais considerando canais ECD e FSD para
o voluntário A01 durante trechos de movimentos de extensão – relaxamento.
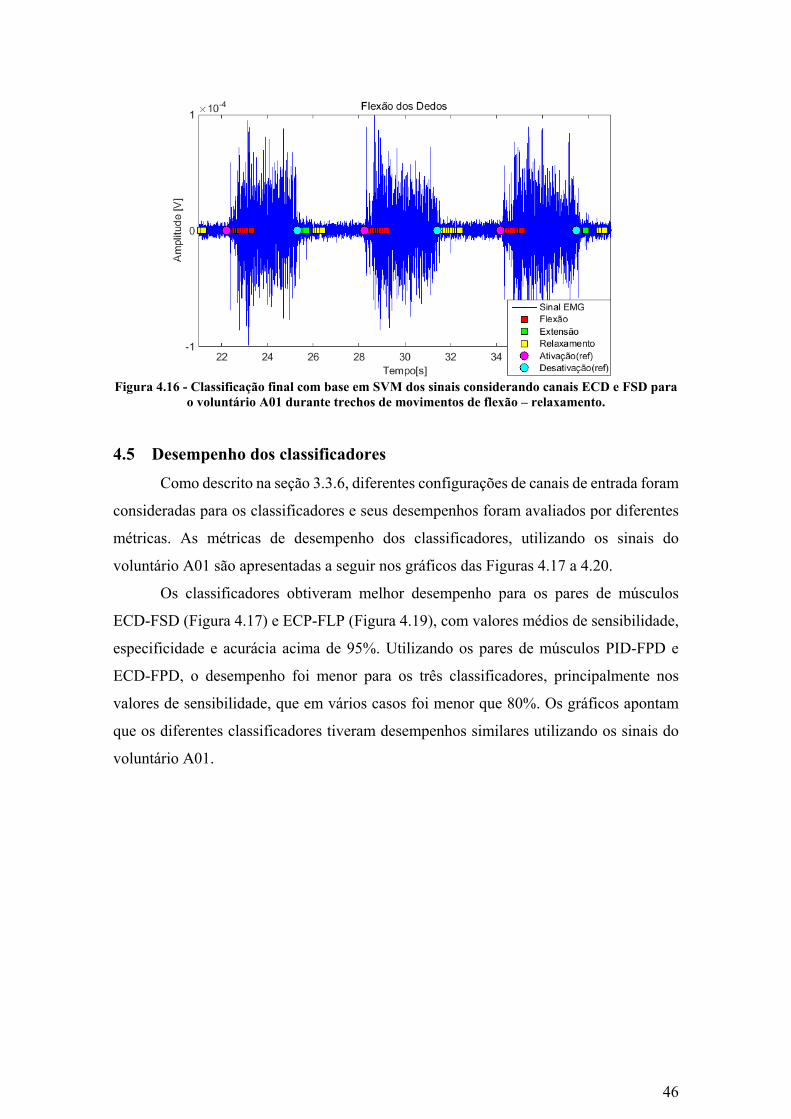
46
Figura 4.16 - Classificação final com base em SVM dos sinais considerando canais ECD e FSD para
o voluntário A01 durante trechos de movimentos de flexão – relaxamento.
4.5 Desempenho dos classificadores
Como descrito na seção 3.3.6, diferentes configurações de canais de entrada foram
consideradas para os classificadores e seus desempenhos foram avaliados por diferentes
métricas. As métricas de desempenho dos classificadores, utilizando os sinais do
voluntário A01 são apresentadas a seguir nos gráficos das Figuras 4.17 a 4.20.
Os classificadores obtiveram melhor desempenho para os pares de músculos
ECD-FSD (Figura 4.17) e ECP-FLP (Figura 4.19), com valores médios de sensibilidade,
especificidade e acurácia acima de 95%. Utilizando os pares de músculos PID-FPD e
ECD-FPD, o desempenho foi menor para os três classificadores, principalmente nos
valores de sensibilidade, que em vários casos foi menor que 80%. Os gráficos apontam
que os diferentes classificadores tiveram desempenhos similares utilizando os sinais do
voluntário A01.
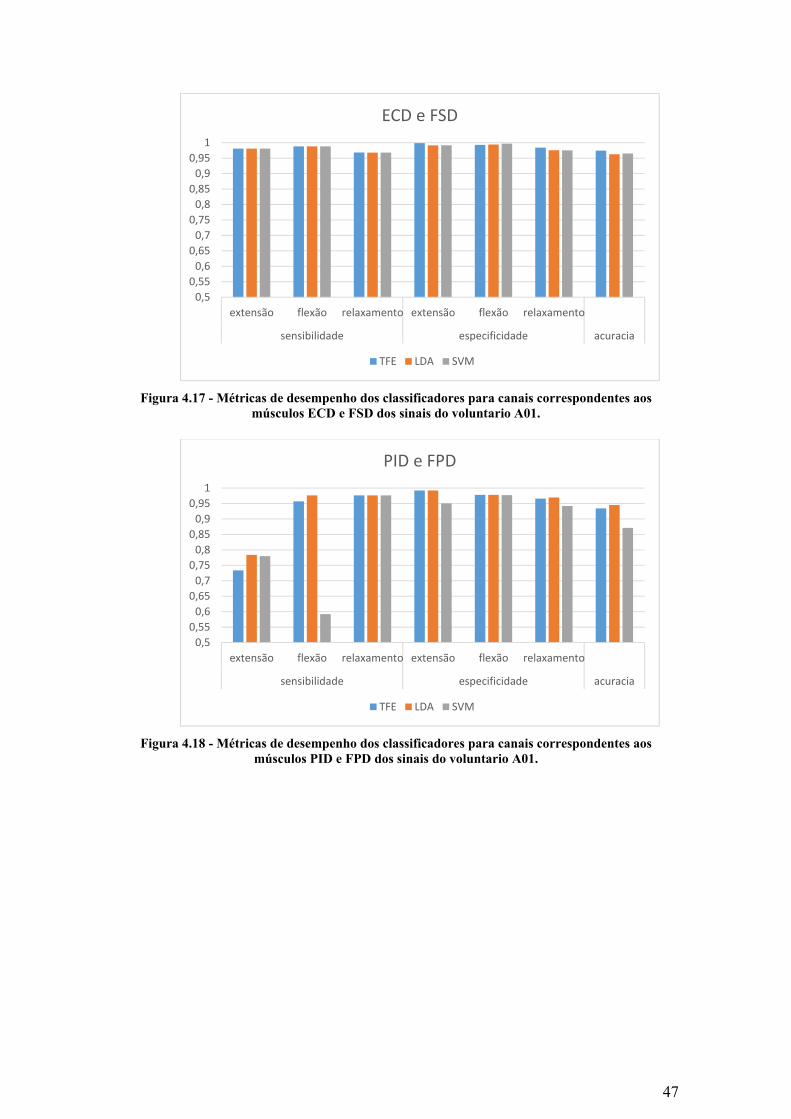
47
Figura 4.17 - Métricas de desempenho dos classificadores para canais correspondentes aos
músculos ECD e FSD dos sinais do voluntario A01.
Figura 4.18 - Métricas de desempenho dos classificadores para canais correspondentes aos
músculos PID e FPD dos sinais do voluntario A01.
0,5
0,55
0,6
0,65
0,7
0,75
0,8
0,85
0,9
0,95
1
extensão flexão relaxamento extensão flexão relaxamento
sensibilidade especificidade acuracia
ECD e FSD
TFE LDA SVM
0,5
0,55
0,6
0,65
0,7
0,75
0,8
0,85
0,9
0,95
1
extensão flexão relaxamento extensão flexão relaxamento
sensibilidade especificidade acuracia
PID e FPD
TFE LDA SVM
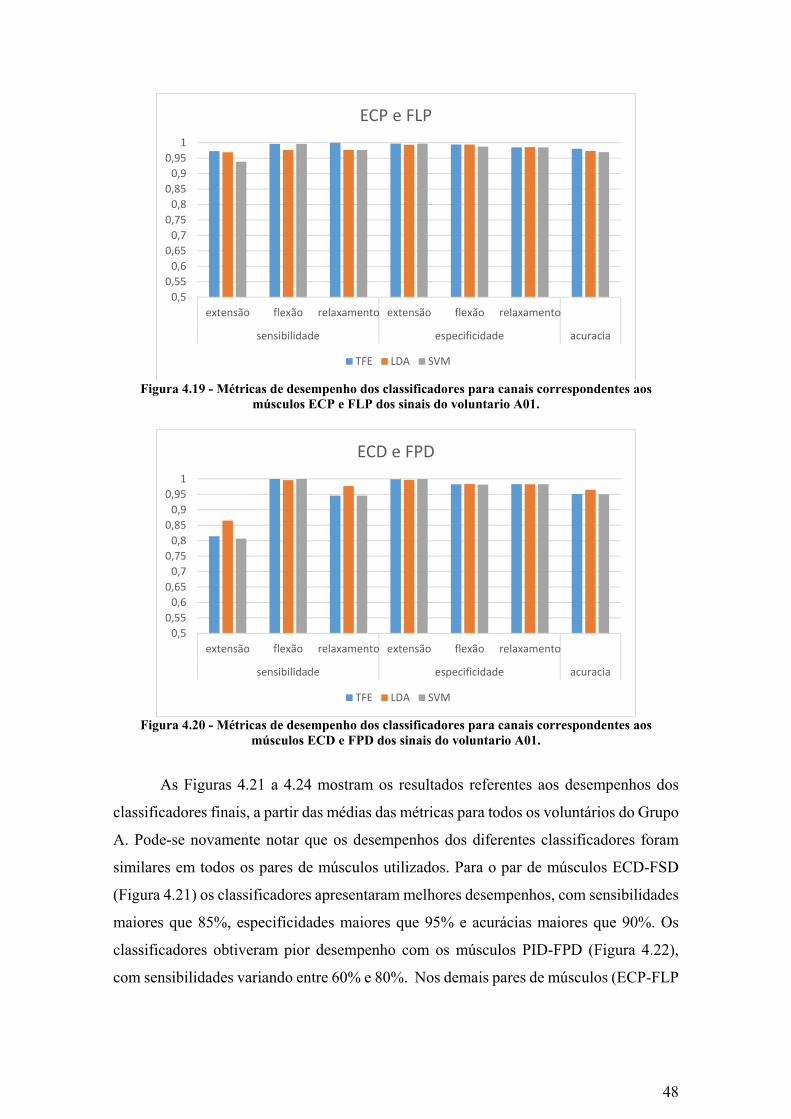
48
Figura 4.19 - Métricas de desempenho dos classificadores para canais correspondentes aos
músculos ECP e FLP dos sinais do voluntario A01.
Figura 4.20 - Métricas de desempenho dos classificadores para canais correspondentes aos
músculos ECD e FPD dos sinais do voluntario A01.
As Figuras 4.21 a 4.24 mostram os resultados referentes aos desempenhos dos
classificadores finais, a partir das médias das métricas para todos os voluntários do Grupo
A. Pode-se novamente notar que os desempenhos dos diferentes classificadores foram
similares em todos os pares de músculos utilizados. Para o par de músculos ECD-FSD
(Figura 4.21) os classificadores apresentaram melhores desempenhos, com sensibilidades
maiores que 85%, especificidades maiores que 95% e acurácias maiores que 90%. Os
classificadores obtiveram pior desempenho com os músculos PID-FPD (Figura 4.22),
com sensibilidades variando entre 60% e 80%. Nos demais pares de músculos (ECP-FLP
0,5
0,55
0,6
0,65
0,7
0,75
0,8
0,85
0,9
0,95
1
extensão flexão relaxamento extensão flexão relaxamento
sensibilidade especificidade acuracia
ECP e FLP
TFE LDA SVM
0,5
0,55
0,6
0,65
0,7
0,75
0,8
0,85
0,9
0,95
1
extensão flexão relaxamento extensão flexão relaxamento
sensibilidade especificidade acuracia
ECD e FPD
TFE LDA SVM
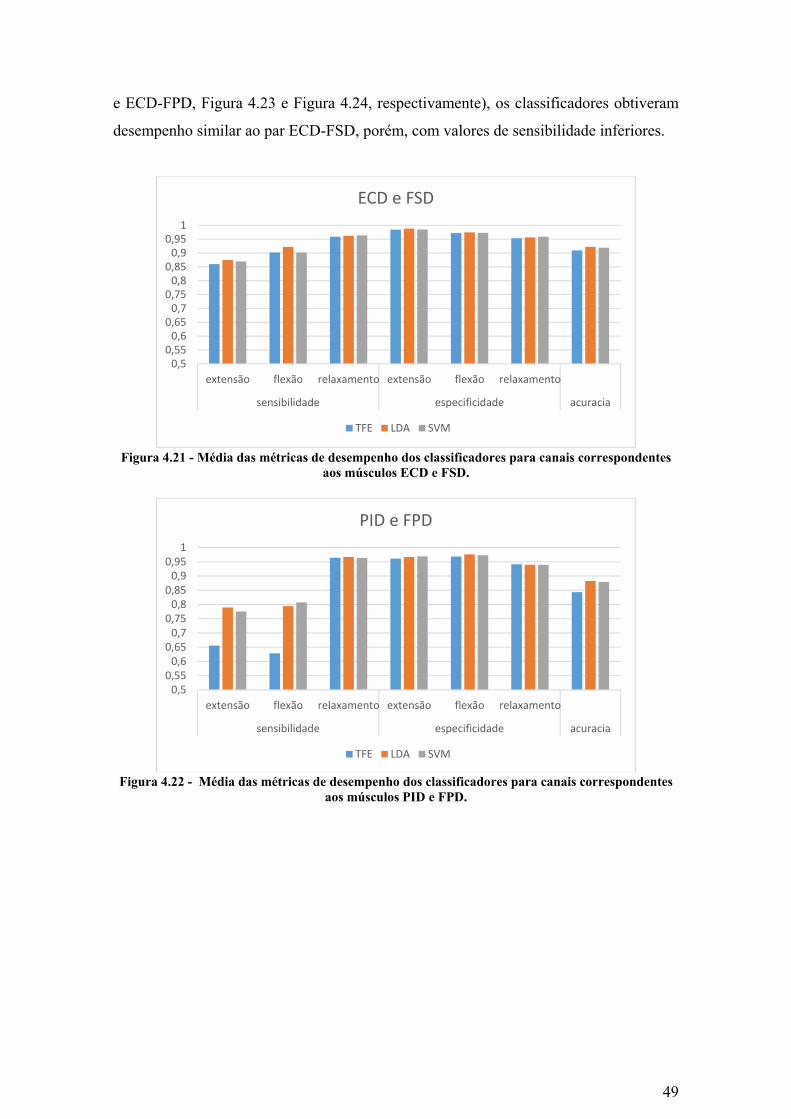
49
e ECD-FPD, Figura 4.23 e Figura 4.24, respectivamente), os classificadores obtiveram
desempenho similar ao par ECD-FSD, porém, com valores de sensibilidade inferiores.
Figura 4.21 - Média das métricas de desempenho dos classificadores para canais correspondentes
aos músculos ECD e FSD.
Figura 4.22 - Média das métricas de desempenho dos classificadores para canais correspondentes
aos músculos PID e FPD.
0,50,550,60,650,70,750,80,850,90,95
1
extensão flexão relaxamento extensão flexão relaxamento
sensibilidade especificidade acuracia
ECD e FSD
TFE LDA SVM
0,50,550,60,650,70,750,80,850,90,95
1
extensão flexão relaxamento extensão flexão relaxamento
sensibilidade especificidade acuracia
PID e FPD
TFE LDA SVM
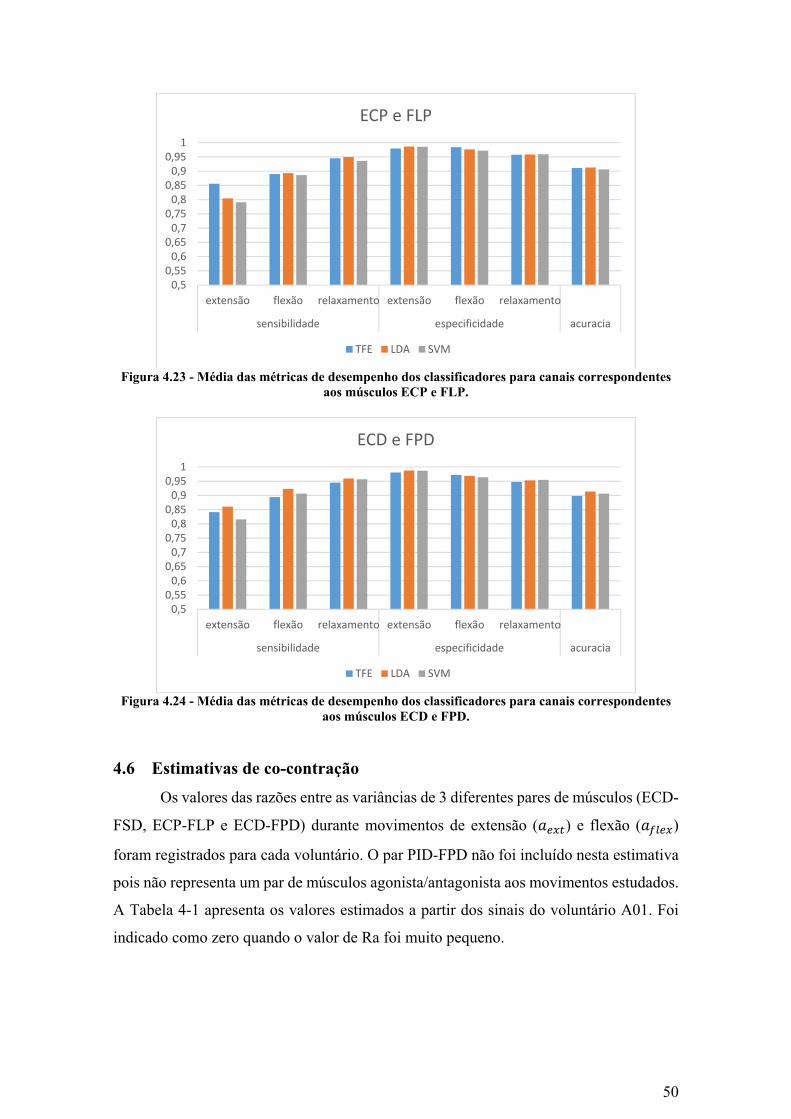
50
Figura 4.23 - Média das métricas de desempenho dos classificadores para canais correspondentes
aos músculos ECP e FLP.
Figura 4.24 - Média das métricas de desempenho dos classificadores para canais correspondentes
aos músculos ECD e FPD.
4.6 Estimativas de co-contração
Os valores das razões entre as variâncias de 3 diferentes pares de músculos (ECD-
FSD, ECP-FLP e ECD-FPD) durante movimentos de extensão ( ) e flexão ( )
foram registrados para cada voluntário. O par PID-FPD não foi incluído nesta estimativa
pois não representa um par de músculos agonista/antagonista aos movimentos estudados.
A Tabela 4-1 apresenta os valores estimados a partir dos sinais do voluntário A01. Foi
indicado como zero quando o valor de Ra foi muito pequeno.
0,50,550,60,650,70,750,80,850,90,95
1
extensão flexão relaxamento extensão flexão relaxamento
sensibilidade especificidade acuracia
ECP e FLP
TFE LDA SVM
0,50,550,60,650,70,750,80,850,90,95
1
extensão flexão relaxamento extensão flexão relaxamento
sensibilidade especificidade acuracia
ECD e FPD
TFE LDA SVM
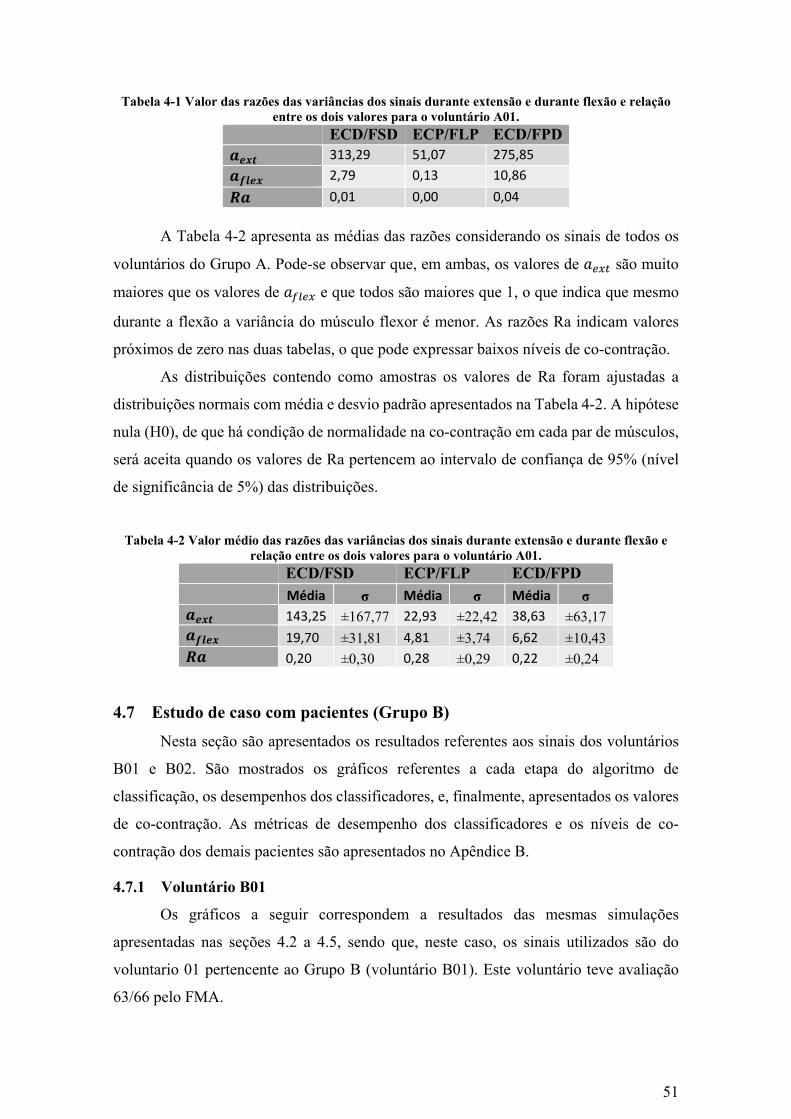
51
Tabela 4-1 Valor das razões das variâncias dos sinais durante extensão e durante flexão e relação entre os dois valores para o voluntário A01.
ECD/FSD ECP/FLP ECD/FPD 313,29 51,07 275,85
2,79 0,13 10,86
0,01 0,00 0,04
A Tabela 4-2 apresenta as médias das razões considerando os sinais de todos os
voluntários do Grupo A. Pode-se observar que, em ambas, os valores de são muito
maiores que os valores de e que todos são maiores que 1, o que indica que mesmo
durante a flexão a variância do músculo flexor é menor. As razões Ra indicam valores
próximos de zero nas duas tabelas, o que pode expressar baixos níveis de co-contração.
As distribuições contendo como amostras os valores de Ra foram ajustadas a
distribuições normais com média e desvio padrão apresentados na Tabela 4-2. A hipótese
nula (H0), de que há condição de normalidade na co-contração em cada par de músculos,
será aceita quando os valores de Ra pertencem ao intervalo de confiança de 95% (nível
de significância de 5%) das distribuições.
Tabela 4-2 Valor médio das razões das variâncias dos sinais durante extensão e durante flexão e relação entre os dois valores para o voluntário A01.
ECD/FSD ECP/FLP ECD/FPD Média σ Média σ Média σ
143,25 ±167,77 22,93 ±22,42 38,63 ±63,17 19,70 ±31,81 4,81 ±3,74 6,62 ±10,43
0,20 ±0,30 0,28 ±0,29 0,22 ±0,24
4.7 Estudo de caso com pacientes (Grupo B)
Nesta seção são apresentados os resultados referentes aos sinais dos voluntários
B01 e B02. São mostrados os gráficos referentes a cada etapa do algoritmo de
classificação, os desempenhos dos classificadores, e, finalmente, apresentados os valores
de co-contração. As métricas de desempenho dos classificadores e os níveis de co-
contração dos demais pacientes são apresentados no Apêndice B.
4.7.1 Voluntário B01
Os gráficos a seguir correspondem a resultados das mesmas simulações
apresentadas nas seções 4.2 a 4.5, sendo que, neste caso, os sinais utilizados são do
voluntario 01 pertencente ao Grupo B (voluntário B01). Este voluntário teve avaliação
63/66 pelo FMA.
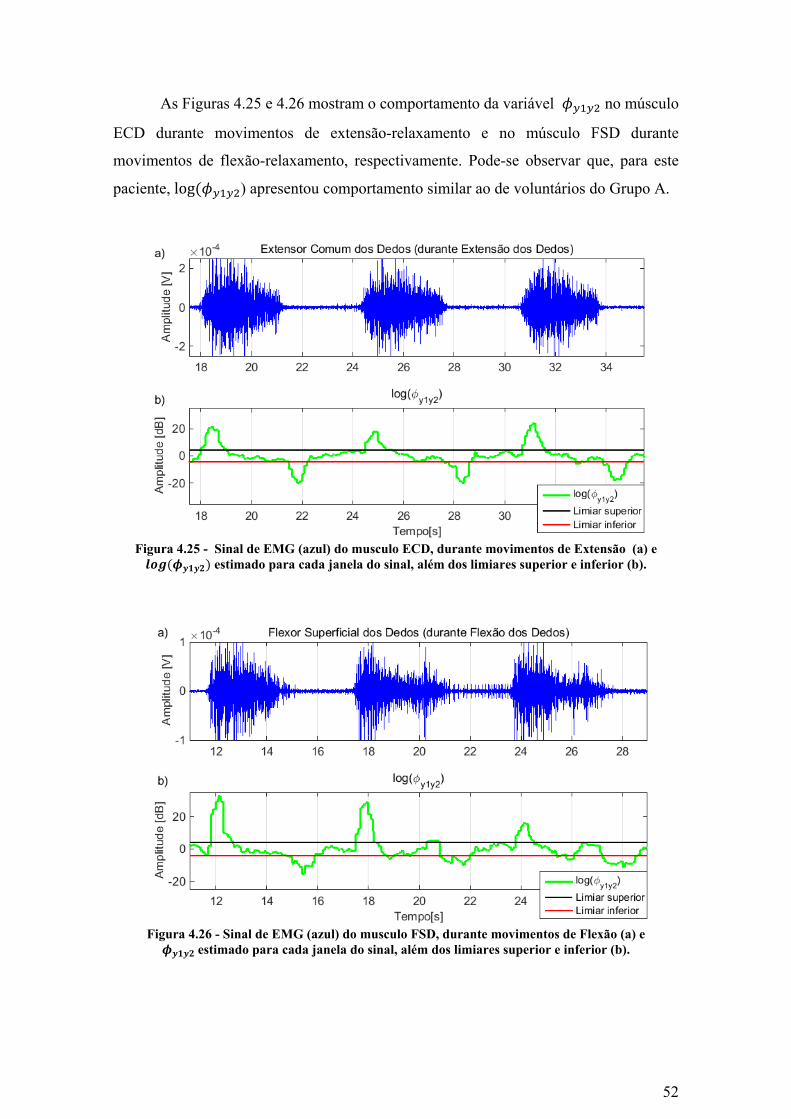
52
As Figuras 4.25 e 4.26 mostram o comportamento da variável no músculo
ECD durante movimentos de extensão-relaxamento e no músculo FSD durante
movimentos de flexão-relaxamento, respectivamente. Pode-se observar que, para este
paciente, log ) apresentou comportamento similar ao de voluntários do Grupo A.
Figura 4.25 - Sinal de EMG (azul) do musculo ECD, durante movimentos de Extensão (a) e
estimado para cada janela do sinal, além dos limiares superior e inferior (b).
Figura 4.26 - Sinal de EMG (azul) do musculo FSD, durante movimentos de Flexão (a) e
estimado para cada janela do sinal, além dos limiares superior e inferior (b).
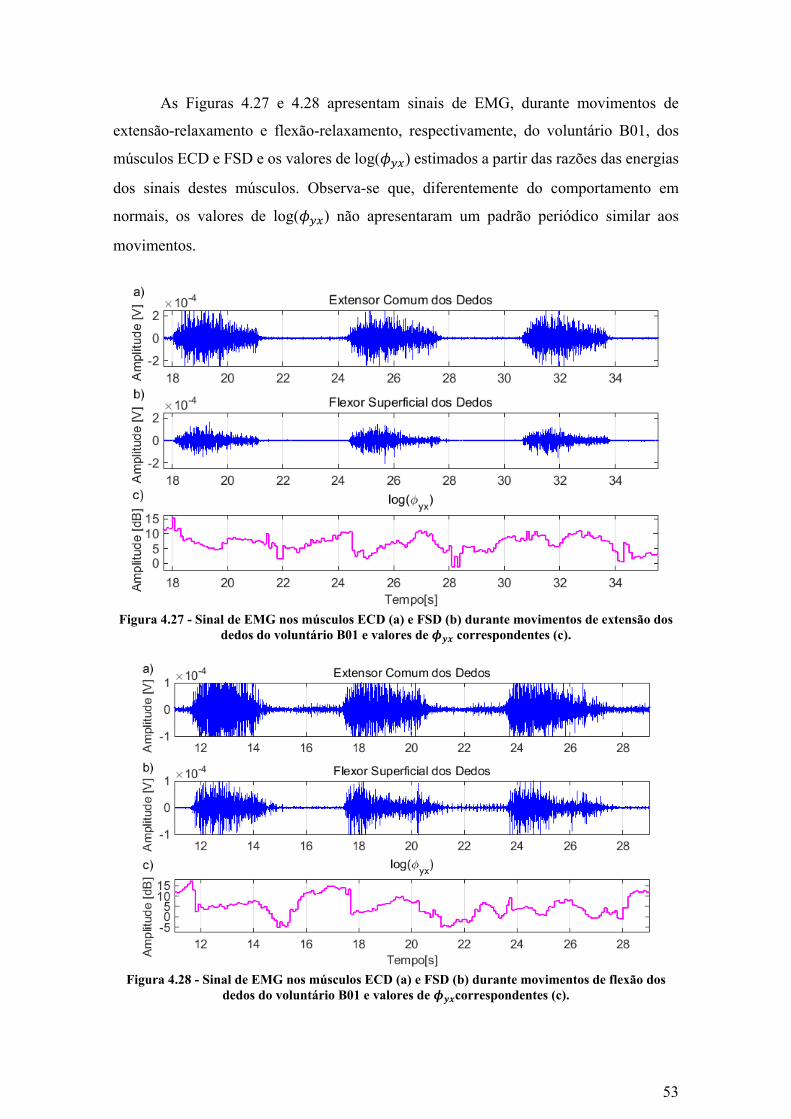
53
As Figuras 4.27 e 4.28 apresentam sinais de EMG, durante movimentos de
extensão-relaxamento e flexão-relaxamento, respectivamente, do voluntário B01, dos
músculos ECD e FSD e os valores de log( ) estimados a partir das razões das energias
dos sinais destes músculos. Observa-se que, diferentemente do comportamento em
normais, os valores de log( ) não apresentaram um padrão periódico similar aos
movimentos.
Figura 4.27 - Sinal de EMG nos músculos ECD (a) e FSD (b) durante movimentos de extensão dos
dedos do voluntário B01 e valores de correspondentes (c).
Figura 4.28 - Sinal de EMG nos músculos ECD (a) e FSD (b) durante movimentos de flexão dos
dedos do voluntário B01 e valores de correspondentes (c).
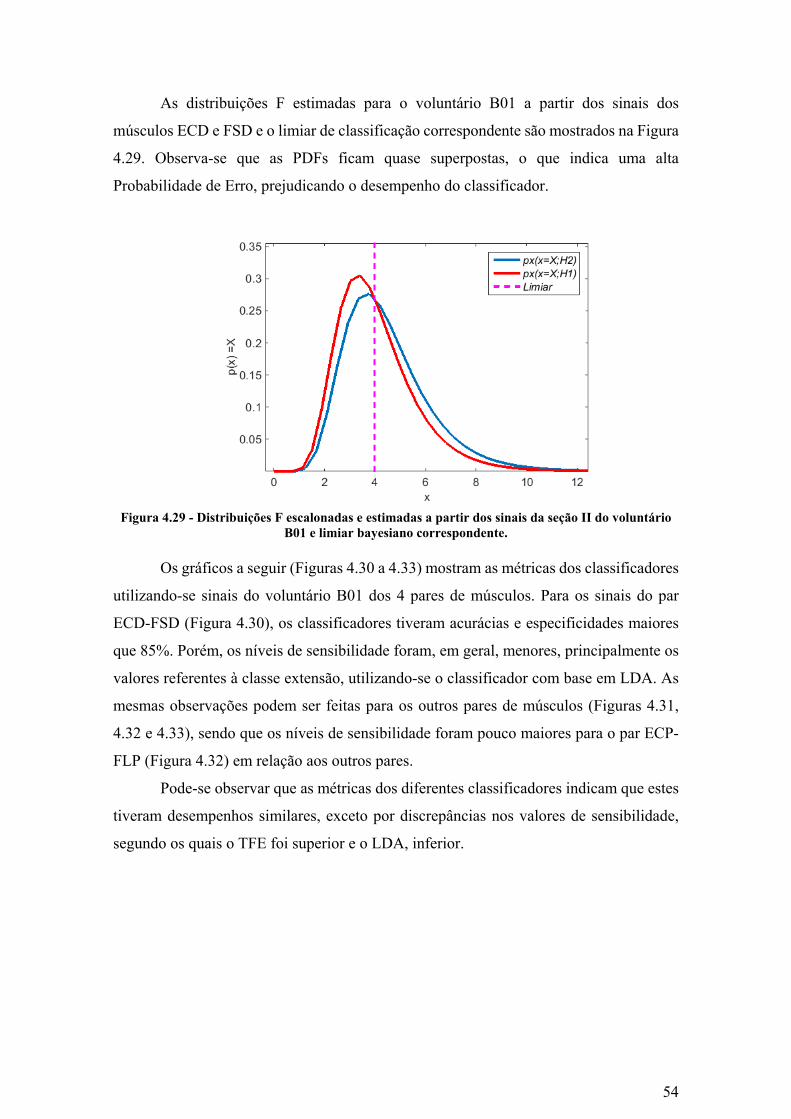
54
As distribuições F estimadas para o voluntário B01 a partir dos sinais dos
músculos ECD e FSD e o limiar de classificação correspondente são mostrados na Figura
4.29. Observa-se que as PDFs ficam quase superpostas, o que indica uma alta
Probabilidade de Erro, prejudicando o desempenho do classificador.
Figura 4.29 - Distribuições F escalonadas e estimadas a partir dos sinais da seção II do voluntário
B01 e limiar bayesiano correspondente.
Os gráficos a seguir (Figuras 4.30 a 4.33) mostram as métricas dos classificadores
utilizando-se sinais do voluntário B01 dos 4 pares de músculos. Para os sinais do par
ECD-FSD (Figura 4.30), os classificadores tiveram acurácias e especificidades maiores
que 85%. Porém, os níveis de sensibilidade foram, em geral, menores, principalmente os
valores referentes à classe extensão, utilizando-se o classificador com base em LDA. As
mesmas observações podem ser feitas para os outros pares de músculos (Figuras 4.31,
4.32 e 4.33), sendo que os níveis de sensibilidade foram pouco maiores para o par ECP-
FLP (Figura 4.32) em relação aos outros pares.
Pode-se observar que as métricas dos diferentes classificadores indicam que estes
tiveram desempenhos similares, exceto por discrepâncias nos valores de sensibilidade,
segundo os quais o TFE foi superior e o LDA, inferior.

55
Figura 4.30- Métricas de desempenho do classificador com base em TFE para canais
correspondentes aos músculos ECD e FSD dos sinais do voluntario B01.
Figura 4.31 - Métricas de desempenho do classificador com base em TFE para canais
correspondentes aos músculos PID e FPD dos sinais do voluntario B01.
00,10,20,30,40,50,60,70,80,91
extensão flexão relaxamento extensão flexão relaxamento
sensibilidade especificidade acuracia
ECD e FSD
TFE LDA SVM
00,10,20,30,40,50,60,70,80,91
extensão flexão relaxamento extensão flexão relaxamento
sensibilidade especificidade acuracia
PID e FPD
TFE LDA SVM
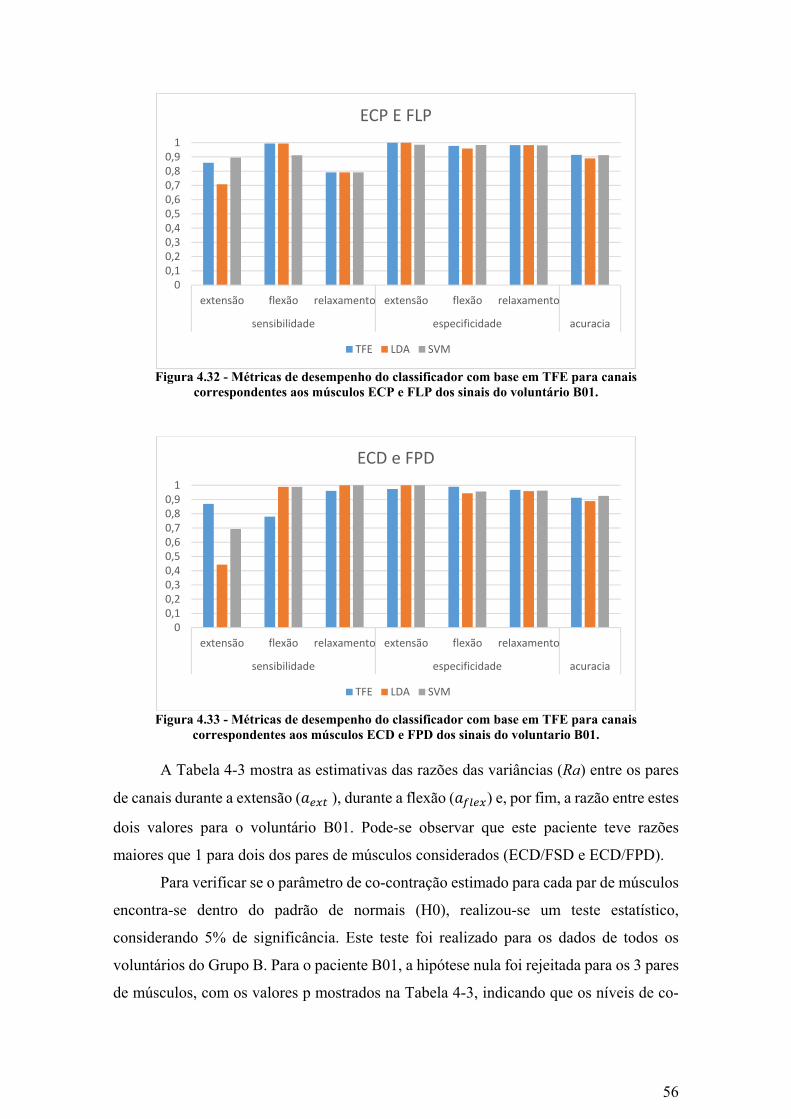
56
Figura 4.32 - Métricas de desempenho do classificador com base em TFE para canais
correspondentes aos músculos ECP e FLP dos sinais do voluntário B01.
Figura 4.33 - Métricas de desempenho do classificador com base em TFE para canais
correspondentes aos músculos ECD e FPD dos sinais do voluntario B01.
A Tabela 4-3 mostra as estimativas das razões das variâncias (Ra) entre os pares
de canais durante a extensão ( ), durante a flexão ( ) e, por fim, a razão entre estes
dois valores para o voluntário B01. Pode-se observar que este paciente teve razões
maiores que 1 para dois dos pares de músculos considerados (ECD/FSD e ECD/FPD).
Para verificar se o parâmetro de co-contração estimado para cada par de músculos
encontra-se dentro do padrão de normais (H0), realizou-se um teste estatístico,
considerando 5% de significância. Este teste foi realizado para os dados de todos os
voluntários do Grupo B. Para o paciente B01, a hipótese nula foi rejeitada para os 3 pares
de músculos, com os valores p mostrados na Tabela 4-3, indicando que os níveis de co-
00,10,20,30,40,50,60,70,80,91
extensão flexão relaxamento extensão flexão relaxamento
sensibilidade especificidade acuracia
ECP E FLP
TFE LDA SVM
00,10,20,30,40,50,60,70,80,91
extensão flexão relaxamento extensão flexão relaxamento
sensibilidade especificidade acuracia
ECD e FPD
TFE LDA SVM
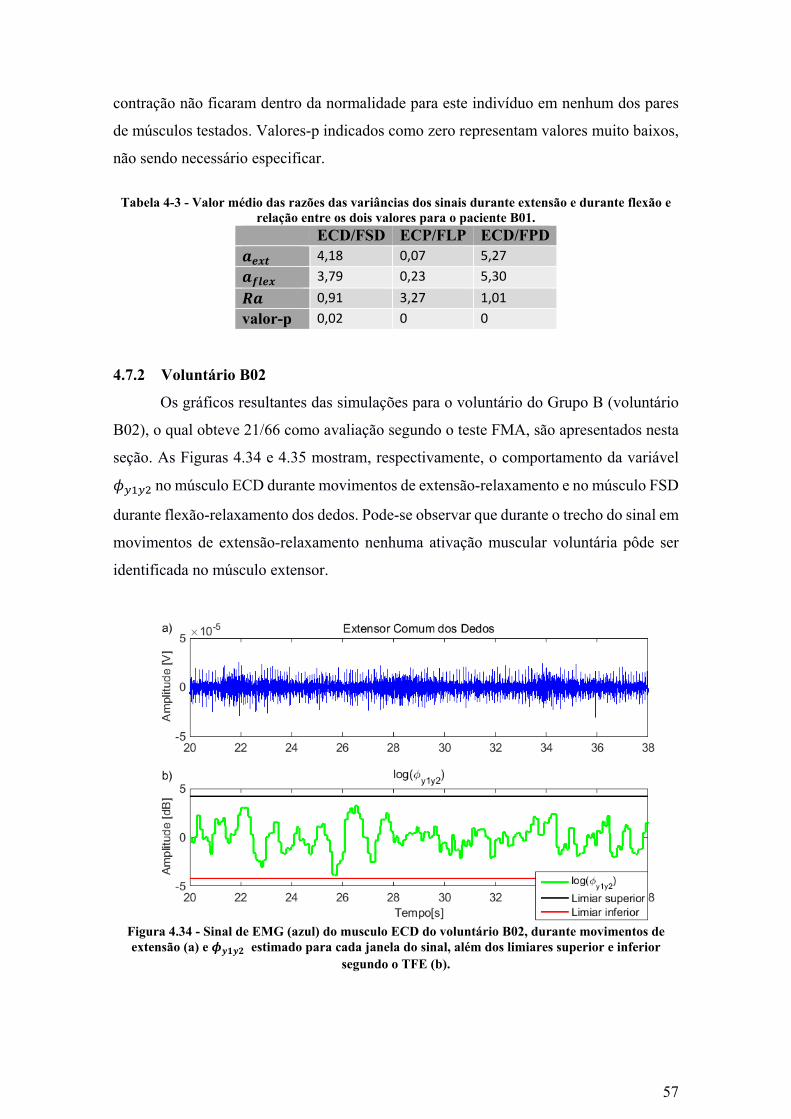
57
contração não ficaram dentro da normalidade para este indivíduo em nenhum dos pares
de músculos testados. Valores-p indicados como zero representam valores muito baixos,
não sendo necessário especificar.
Tabela 4-3 - Valor médio das razões das variâncias dos sinais durante extensão e durante flexão e
relação entre os dois valores para o paciente B01. ECD/FSD ECP/FLP ECD/FPD
4,18 0,07 5,27
3,79 0,23 5,30
0,91 3,27 1,01
valor-p 0,02 0 0
4.7.2 Voluntário B02
Os gráficos resultantes das simulações para o voluntário do Grupo B (voluntário
B02), o qual obteve 21/66 como avaliação segundo o teste FMA, são apresentados nesta
seção. As Figuras 4.34 e 4.35 mostram, respectivamente, o comportamento da variável
no músculo ECD durante movimentos de extensão-relaxamento e no músculo FSD
durante flexão-relaxamento dos dedos. Pode-se observar que durante o trecho do sinal em
movimentos de extensão-relaxamento nenhuma ativação muscular voluntária pôde ser
identificada no músculo extensor.
Figura 4.34 - Sinal de EMG (azul) do musculo ECD do voluntário B02, durante movimentos de extensão (a) e estimado para cada janela do sinal, além dos limiares superior e inferior
segundo o TFE (b).
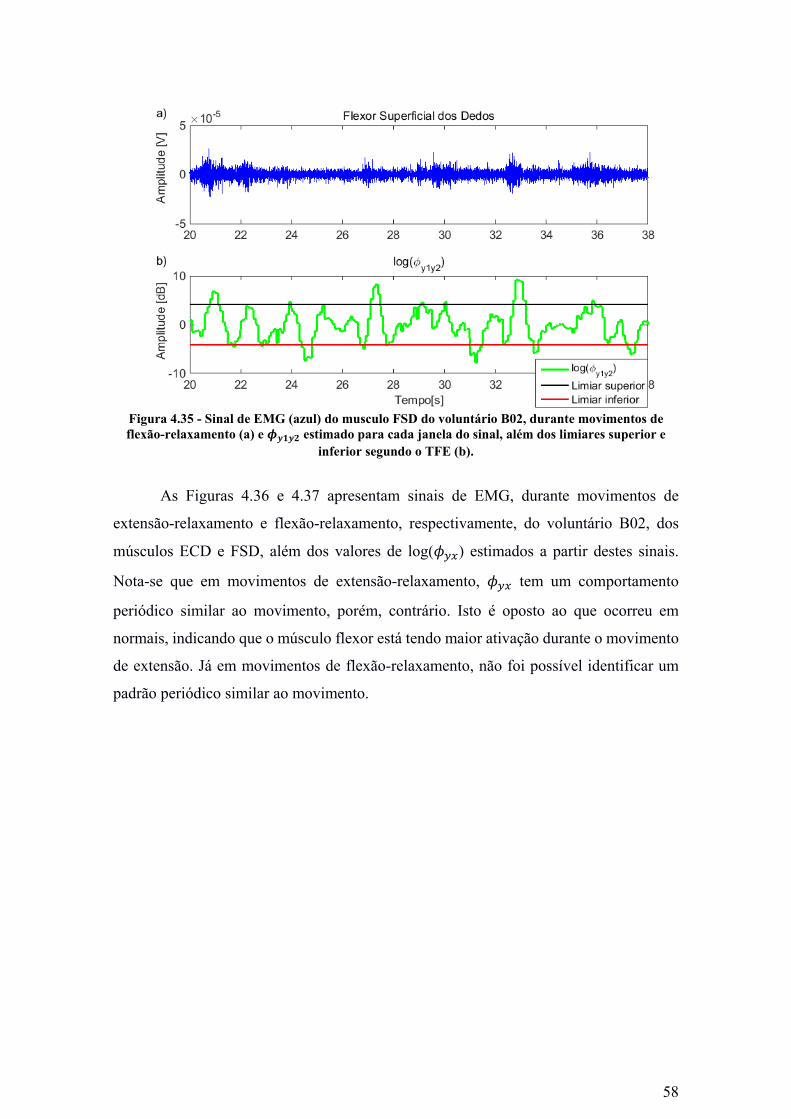
58
Figura 4.35 - Sinal de EMG (azul) do musculo FSD do voluntário B02, durante movimentos de flexão-relaxamento (a) e estimado para cada janela do sinal, além dos limiares superior e
inferior segundo o TFE (b).
As Figuras 4.36 e 4.37 apresentam sinais de EMG, durante movimentos de
extensão-relaxamento e flexão-relaxamento, respectivamente, do voluntário B02, dos
músculos ECD e FSD, além dos valores de log( ) estimados a partir destes sinais.
Nota-se que em movimentos de extensão-relaxamento, tem um comportamento
periódico similar ao movimento, porém, contrário. Isto é oposto ao que ocorreu em
normais, indicando que o músculo flexor está tendo maior ativação durante o movimento
de extensão. Já em movimentos de flexão-relaxamento, não foi possível identificar um
padrão periódico similar ao movimento.
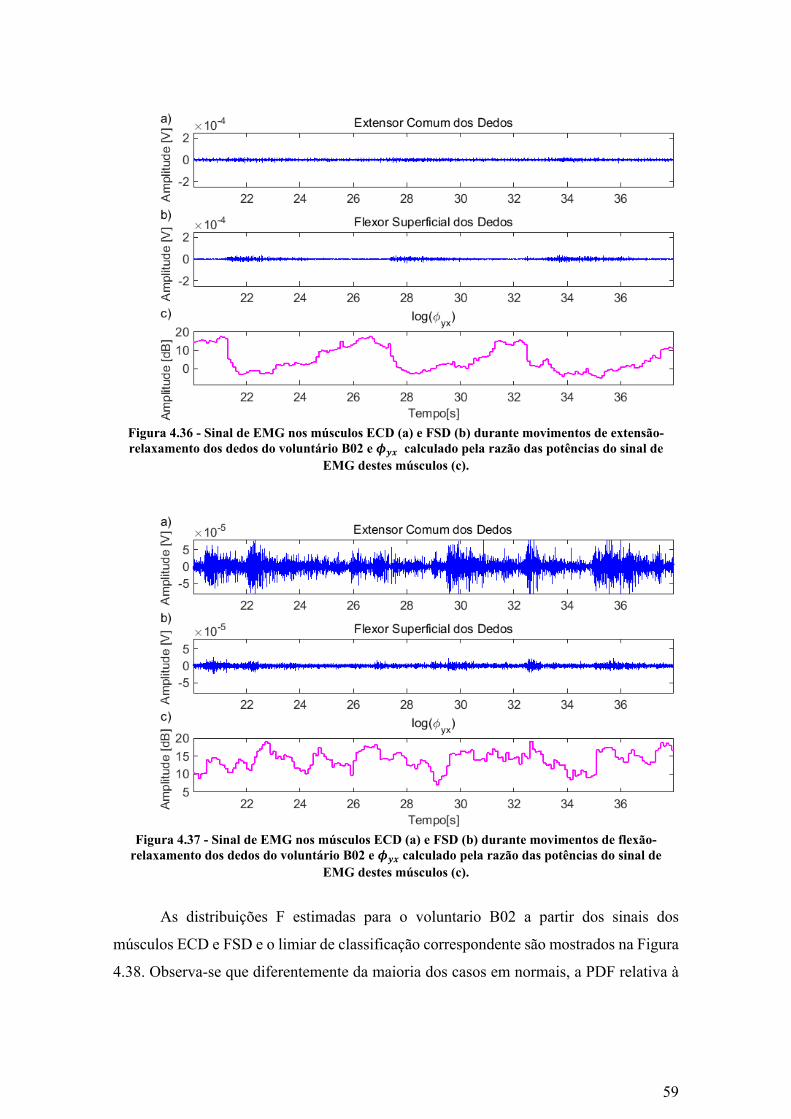
59
Figura 4.36 - Sinal de EMG nos músculos ECD (a) e FSD (b) durante movimentos de extensão-relaxamento dos dedos do voluntário B02 e calculado pela razão das potências do sinal de
EMG destes músculos (c).
Figura 4.37 - Sinal de EMG nos músculos ECD (a) e FSD (b) durante movimentos de flexão-
relaxamento dos dedos do voluntário B02 e calculado pela razão das potências do sinal de EMG destes músculos (c).
As distribuições F estimadas para o voluntario B02 a partir dos sinais dos
músculos ECD e FSD e o limiar de classificação correspondente são mostrados na Figura
4.38. Observa-se que diferentemente da maioria dos casos em normais, a PDF relativa à
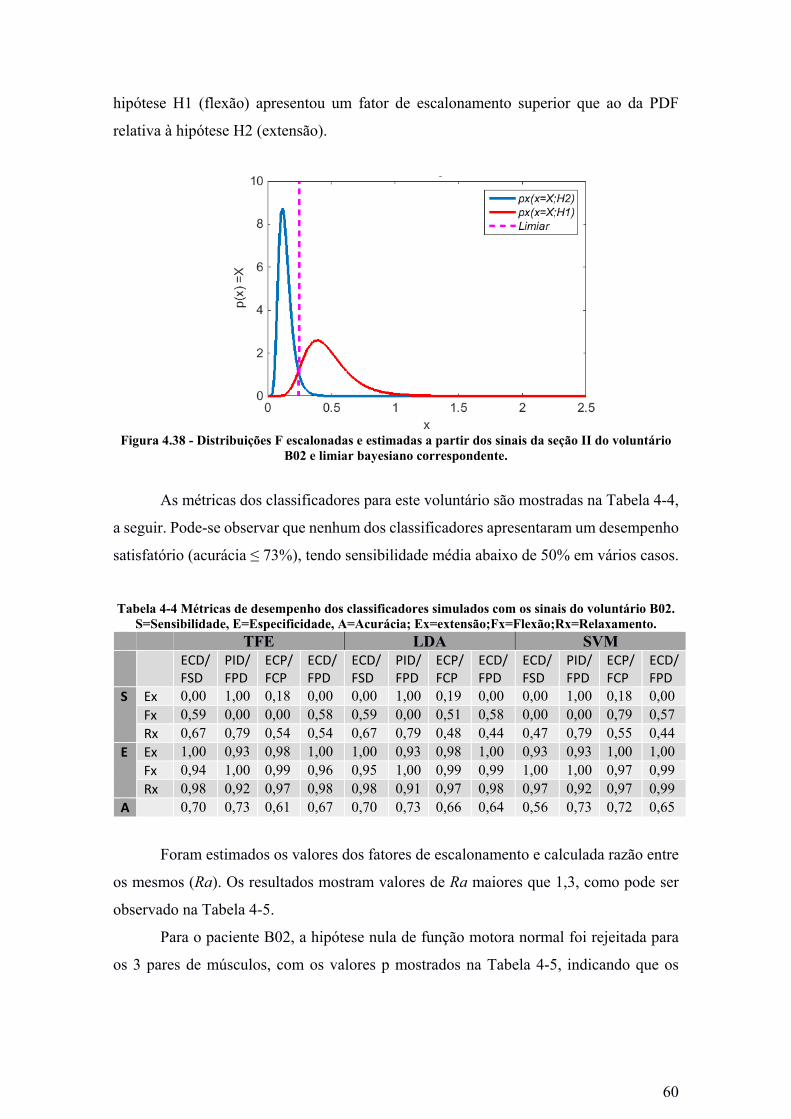
60
hipótese H1 (flexão) apresentou um fator de escalonamento superior que ao da PDF
relativa à hipótese H2 (extensão).
Figura 4.38 - Distribuições F escalonadas e estimadas a partir dos sinais da seção II do voluntário
B02 e limiar bayesiano correspondente.
As métricas dos classificadores para este voluntário são mostradas na Tabela 4-4,
a seguir. Pode-se observar que nenhum dos classificadores apresentaram um desempenho
satisfatório (acurácia ≤ 73%), tendo sensibilidade média abaixo de 50% em vários casos.
Tabela 4-4 Métricas de desempenho dos classificadores simulados com os sinais do voluntário B02. S=Sensibilidade, E=Especificidade, A=Acurácia; Ex=extensão;Fx=Flexão;Rx=Relaxamento.
TFE LDA SVM ECD/
FSD PID/ FPD
ECP/ FCP
ECD/FPD
ECD/FSD
PID/ FPD
ECP/FCP
ECD/FPD
ECD/FSD
PID/ FPD
ECP/ FCP
ECD/FPD
S Ex 0,00 1,00 0,18 0,00 0,00 1,00 0,19 0,00 0,00 1,00 0,18 0,00Fx 0,59 0,00 0,00 0,58 0,59 0,00 0,51 0,58 0,00 0,00 0,79 0,57Rx 0,67 0,79 0,54 0,54 0,67 0,79 0,48 0,44 0,47 0,79 0,55 0,44
E Ex 1,00 0,93 0,98 1,00 1,00 0,93 0,98 1,00 0,93 0,93 1,00 1,00Fx 0,94 1,00 0,99 0,96 0,95 1,00 0,99 0,99 1,00 1,00 0,97 0,99Rx 0,98 0,92 0,97 0,98 0,98 0,91 0,97 0,98 0,97 0,92 0,97 0,99
A 0,70 0,73 0,61 0,67 0,70 0,73 0,66 0,64 0,56 0,73 0,72 0,65
Foram estimados os valores dos fatores de escalonamento e calculada razão entre
os mesmos (Ra). Os resultados mostram valores de Ra maiores que 1,3, como pode ser
observado na Tabela 4-5.
Para o paciente B02, a hipótese nula de função motora normal foi rejeitada para
os 3 pares de músculos, com os valores p mostrados na Tabela 4-5, indicando que os

61
níveis de co-contração não ficaram dentro da normalidade para este indivíduo em nenhum
dos pares de músculos avaliados.
Tabela 4-5 Valor médio das razões das variâncias dos sinais durante extensão e durante flexão e relação entre os dois valores para o paciente B02.
ECD/FSD ECP/FLP ECD/FPD 0,12 1,94 0,59
0,47 2,71 1,56
3,84 1,39 2,63
valor-p 0 0 0
4.7.3 Comparações entre desempenho e FMA de pacientes
Realizou-se uma análise procurando relacionar os resultados dos desempenhos
dos classificadores para os diferentes pacientes, com os seus respectivos níveis de
recuperação funcional, dados pela avaliação FMA. Na Figura 4.39 foram traçados os
níveis médios das métricas de desempenho dos classificadores, ou seja, sensibilidade
(amarelo), especificidade (verde) e acurácia (azul) para os sinais de cada paciente, os
quais estão organizados em ordem decrescente segundo as respectivas notas FMA.
Figura 4.39 - Métricas de desempenho dos classificadores: acurácia(azul), especificidade(verde) e
sensibilidade (vermelho), em função das notas FMA de cada paciente.
Os níveis de especificidade apresentam pequena diferença entre os diferentes
pacientes. Observa-se que há uma certa tendência a que os níveis de acurácia e
sensibilidade aumentem com o aumento das notas FMA, à exceção do paciente B07, que,
apesar de ter baixa nota FMA, os respectivos sinais levaram a um alto desempenho dos
classificadores.

62
5 Discussão
Este trabalho propôs um novo algoritmo para classificar movimentos básicos da
mão (abertura, fechamento e relaxamento dos dedos da mão) com base nas razões das
PSDs de diferentes músculos restritos a uma faixa de frequências especifica para futura
aplicação em tempo real. Empregando-se a razão entre duas PSDs, como característica
para a classificação, foi possível utilizar uma técnica baseada em limiar estatístico, o teste
F espectral (TFE).
A classificação propriamente dita dividiu-se em 3 partes, sendo que, na primeira
procurou-se identificar intenção de movimento, relaxamento, utilizando-se o teste F
espectral, com abordagem Neyman Pearson, com base nas estimativas de energia do
trecho atual do sinal, dividido pelo trecho anterior ( ). O TFE, neste caso, foi
avaliado com níveis de significância de 1%, 2% e 5%, tendo o primeiro levado a um
menor número de falsos positivos com um nível de sensibilidade satisfatório. Portanto, o
nível de significância considerado para o teste com Neyman Pearson foi de 1%.
Simulações em tempo real foram realizadas para analisar o comportamento desta razão
de energias ao longo do tempo e para os diferentes músculos considerados, mostrando
que , e, portanto, a energia do sinal , cresce rapidamente no início do movimento,
mantendo-se aproximadamente constante até decrescer ao final do mesmo, durante o
relaxamento da mão. Este padrão foi observado em todos os músculos coletados em
voluntários do Grupo A, ou seja, com função motora considerada normal de membro
superior. Porém, em alguns dos pacientes após AVE (Grupo B), em certos músculos, não
foi possível identificar ou identificaram-se poucas ativações e desativações musculares
com o método utilizado levando a baixos níveis de sensibilidade no classificador final.
Neste trabalho, avaliou-se a acurácia somente do classificador final. Avaliações do
desempenho deste método de identificação de ativação e desativação muscular de forma
isolada devem ser realizadas, e, uma vez confirmado seu alto desempenho, pode ser
utilizado de forma independente em outras aplicações.
Na segunda parte da classificação, utilizou-se a relação entre as energias de dois
músculos, , para classificação inicial entre extensão e flexão. O comportamento de
, quando avaliado ao longo do sinal durante movimentos repetidos de extensão-
relaxamento e flexão-relaxamento, permitiu observar que existe uma alta correspondência
entre esta razão e os movimentos realizados, tanto de extensão quanto de flexão dos
dedos. Em geral, para a extensão, em normais, estes valores mantêm níveis mais baixos
63
durante o período em que a mão fica relaxada e níveis mais altos durante o movimento.
O contrário ocorre durante movimentos de flexão. Este comportamento é esperado, visto
que, em um movimento, os músculos agonistas possuem ativação muscular maior que os
antagonistas. Em normais, este padrão não ocorreu apenas para o par PID-FPD.
Este tipo de classificador necessita de um parâmetro inicial para determinação do
limiar. Este parâmetro é estimado a partir de sinais registrados em uma seção específica,
denominada seção de treinamento. Neste trabalho, o treinamento consistiu de 10
movimentos de flexão e 10 de extensão, resultando nas acurácias finais apresentadas nos
gráficos das Figuras 4.20 a 4.24. Não foram, porém, simulados os sinais a partir de
números menores ou maiores de movimentos, de forma que o número mínimo de
movimentos para alcançar uma dada acurácia não foi teoricamente determinado. Este
estudo deverá ser feito em trabalhos futuros.
Adicionalmente, a etapa de classificação inicial entre extensão e flexão foi
simulada utilizando-se os classificadores LDA e SVM para comparação. Em geral, as
técnicas quando aplicadas não levaram a diferenças significativas no desempenho do
classificador final, segundo as métricas utilizadas (sensibilidade, especificidade e
acurácia).
Simulações utilizando os classificadores LDA e SVM foram realizadas
adicionalmente com dois conjuntos de 4 músculos (ECD- PID-FSD- FPD e ECD- ECP-
FLP- FSD) e também com todos os 6 músculos (resultados não apresentados). Porém, as
métricas para tais classificadores não indicaram melhora em relação aos classificadores
que utilizaram apenas dois músculos diretamente relacionados aos dois movimentos
(flexão e extensão). Porém, para classificar um maior número de movimentos será
necessário considerar outros músculos relacionados aos movimentos. Assim, no futuro
uma técnica com base no TFE bayesiano para mais variáveis deve ser desenvolvida.
Em relação ao desempenho dos classificadores, pôde-se observar através dos
valores médios das métricas de sensibilidade, especificidade e acurácia que os
classificadores que utilizaram os canais PID e FPD tiveram um menor desempenho. Isto
pode ser explicado pelo fato de que este não representa um par de músculos
explicitamente antagonistas. Além disso, o PID não é um músculo diretamente
relacionado aos movimentos que pretende-se classificar. Ele pode ser ativado de forma
similar tanto na extensão quanto na flexão, não sendo portanto informativo para a
classificação entre estes dois movimentos.

64
Apesar dos valores de nos sinais dos voluntários do Grupo B não seguirem
um padrão tão bem definido quanto o dos voluntários do Grupo A, os classificadores
tiveram desempenhos aceitáveis, tendo a acurácia média ficado acima de 70% em 4 dos
7 pacientes avaliados. Em 3 dos 4 pacientes com bons resultados houve avaliações com
notas altas (maiores que 60) com o FMA (o quarto indivíduo foi avaliado com apenas
27/66), o que sugere que quanto mais próximos de um padrão normal, melhor será o
desempenho do classificador. Um dos fatores que dificultam a classificação em sinais de
EMG de pacientes é que há uma atividade involuntária, a qual representa ruído neste caso.
Porém, se esta atividade for alta dentro da banda de frequências considerada para as
estimativas das energias, esta poderá ser confundida com atividade voluntária, ou, em
outros casos pode mascarar o sinal de EMG resultante de contração muscular voluntária.
Este problema deve ser contornado restringindo-se as bandas avaliadas àquelas que
concentram maiores níveis de atividade voluntária em cada indivíduo. Além disso, este
estudo propôs a aquisição de sinais de 6 músculos, sendo que apenas 2 são usados. Essa
redundância, na prática, permite que se utilize o melhor par de canais, isto é, aquele que
tiver menor probabilidade de erro, o qual poderá ser calculado com base nas estimativas
do parâmetro a nos diferentes movimentos a partir de uma seção de treinamento. Em
resumo, melhores desempenhos dos classificadores quando aplicados a pacientes após-
AVE poderiam ser obtidos ao selecionar pares de músculos que forneçam a probabilidade
de erro mais baixa e faixas de frequências estimadas individualmente, com base nos sinais
da seção II. Caso ainda assim, o desempenho não seja satisfatório, torna-se necessário
realizar um estudo aprofundado de cada caso para a determinação de características
individualizadas que permitam classificar os diferentes movimentos, visto que há baixa
uniformidade do perfil clinico dos diferentes sujeitos após AVE.
Estimativas das razões entre os fatores de escalonamento a, os quais foram
registrados a partir da seção II, podem ser indicadores de nível de co-contração, e, neste
caso, poderiam ser úteis para a avaliação do estágio de recuperação do paciente ao longo
do tratamento. Os valores de a estimados para os indivíduos do Grupo A apresentaram
valores quase sempre superiores a 1 tanto na flexão quanto na extensão dos dedos,
indicando que os sinais provavelmente não possuem mesma proporção quando
adquiridos. Isto pode ser explicado pelo fato de os músculos extensores serem, em geral,
mais superficiais, sofrendo, portanto, menor influência do volume condutor. O índice Ra,
calculado a partir dos fatores de escalonamento forneceu uma medida mais confiável para
comparação entre diferentes sujeitos ou para o mesmo sujeito entre diferentes coletas de
65
sinais. Foi possível observar, por exemplo que os valores de Ra foram
predominantemente muito menores que 1 para voluntários do Grupo A, apontando para
baixos níveis de co-contração, e foram maiores que 1 para alguns pares de músculos de
voluntários do Grupo B, o qual aponta para altos níveis de co-contração. A partir dos
testes estatísticos realizados tomando como base as distribuições ajustadas por meio dos
dados dos voluntários do Grupo A, mostrou-se que os valores de Ra correspondentes a
10 dos 21 pares de músculos testados não estão dentro da normalidade. Sendo Ra uma
estimativa de co-contração, isto indica que em boa parte dos casos, em pacientes após
AVE, os níveis de co-contração dos músculos relacionados à extensão e à flexão dos
dedos são mais altos que em indivíduos normais. Este resultado concordou com uma das
conclusões do trabalho de Chae e colaboradores (2002), em que foi experimentalmente
demonstrada diferença significativa entre os níveis de co-contração entre membros
paréticos e não paréticos. Porém, dentro do grupo de indivíduos com membro parético do
presente estudo, não foi possível estabelecer uma relação entre os níveis de prejuízo motor
dos mesmos (medidos com o FMA) e os níveis de co-contração estimados para 2 dos 7
pacientes. Um destes pacientes teve nota baixa na avaliação FMA (B07 = 27) mas obteve
baixos níveis de co-contração (Ra≤1). Em contrapartida, outro paciente também com nota
baixa segundo o FMA (B02), obteve níveis de co-contração muito altos para os 3
músculos avaliados. Porém, devido à pequena quantidade de dados de pacientes
disponíveis no presente estudo, é necessária uma investigação mais aprofundada,
incluindo-se maior número de sujeitos de pesquisa com membro parético, além de
maiores informações sobre estado do paciente, como, por exemplo, o nível de
espasticidade, os quais possibilitariam explicar melhor as diferenças encontradas.
Em trabalhos futuros deve-se incluir o estudo da razão denotada neste trabalho
por como estimador da velocidade do movimento. Este parâmetro poderia ser
utilizado no controle proporcional, abordagem ainda pouco explorada, embora bastante
promissora, para o controle de dispositivos, como próteses, baseados em EMG (Jiang et
al. 2012).
66
6 Conclusão
Este trabalho propôs a utilização de uma nova característica para a classificação
de sinais de EMG, que é a razão entre as energias de dois trechos de sinais dentro de uma
banda de frequência. Tal característica, é ajustada a uma distribuição F, de forma que seja
possível estabelecer limiares com embasamento estatístico. Considerando-se todas as
etapas, até a classificação final, o método empregado mostrou-se adequado para a
classificação de movimentos de abertura e fechamento da mão com base em sinais de
EMG de indivíduos com função motora normal de membro superior, tendo como
resultado, uma acurácia média de aproximadamente 90%. Já para pacientes com
hemiparesia de membro superior após AVE, alguns ajustes devem ser realizados no
método, como, por exemplo, a restrição da banda de frequência considerada para a
estimação das características, específica de cada indivíduo, afim de se obter maiores
desempenhos na classificação dos movimentos. As características que dificultam a
classificação em membros paréticos não são, porém, encontradas em outras categorias de
indivíduos que utilizam tecnologias assistivas, como os amputados. Portanto, sugere-se
que a aplicação desta técnica para o controle por EMG de próteses por estes indivíduos
deverá gerar bons resultados.
Os resultados relativos ao parâmetro Ra sugeriram que este possa ser um indicador
de diferenças de recrutamento motor entre membros não paréticos e membros paréticos.
Estudos mais focados nesta questão e incluindo-se maior número de sujeitos com membro
parético deverão ser realizados afim de avaliar a hipótese de que Ra possa ainda indicar
o estágio funcional muscular de pacientes, o que, se confirmado, será muito útil na
avaliação de programas de reabilitação após AVE.
Os resultados deste estudo foram obtidos por meio de simulações a partir de sinais
previamente coletados. A aplicação prática do algoritmo controlando um dispositivo ou
software deverá ser realizada de forma que se possa avaliar com maior precisão a sua
usabilidade.
67
7 Bibliografia
Ashford, Stephen, Mike Slade, Fabienne Malaprade, e Lynne Turner-Stokes. 2008. “Evaluation of Functional Outcome Measures for the Hemiparetic Upper Limb: A Systematic Review”. Journal of Rehabilitation Medicine 40 (10): 787–95. doi:10.2340/16501977-0276.
Atoufi, Bahareh, Ernest Nlandu Kamavuako, Bernard Hudgins, e Kevin Englehart. 2014. “Toward proportional control of myoelectric prostheses with muscle synergies”. Journal of Medical and Biological Engineering 34 (5): 475–81.
Branco, Raquel. 2015. “A dominância cortical no potencial pré-motor em tarefa voluntária unilateral”. Universidade Federal do Rio de Janeiro. Rio de Janeiro, Brasil.
Brol, AM, e NMS Magagnin. 2010. “Aplicação da combinação da terapia de restrição e indução do movimento e toxina botulínica tipo A em uma paciente hemiparética crônica pós acidente vascular encefálico: um estudo de caso”. Universidade de Passo Fundo -UFP.
Chae, John, Guang Yang, Byung Kyu Park, e Ihab Labatia. 2002. “Muscle Weakness and Cocontraction in Upper Limb Hemiparesis: Relationship to Motor Impairment and Physical Disability”. Neurorehabilitation and Neural Repair 16 (3): 241–48.
Chowdhury, Rubana H., Mamun B. I. Reaz, Mohd Alauddin Bin Mohd Ali, Ashrif A. A. Bakar, Kalaivani Chellappan, e Tae G. Chang. 2013. “Surface Electromyography Signal Processing and Classification Techniques”. Sensors 13 (9): 12431–66. doi:10.3390/s130912431.
Cipriani, Christian, Franco Zaccone, Silvestro Micera, e M. Chiara Carrozza. 2008. “On the shared control of an EMG-controlled prosthetic hand: analysis of user–prosthesis interaction”. IEEE Transactions on Robotics 24 (1): 170–84.
de Medeiros, Candice Simões Pimenta, Sabrina Gabrielle Gomes Fernandes, Johnnatas Mikael Lopes, Enio Walker Azevedo Cacho, e Roberta de Oliveira Cacho. 2014. “Efeito da terapia de espelho por meio de atividades funcionais e padrões motores na função do membro superior pós-acidente vascular encefálico”. Fisioterapia e Pesquisa 21 (3): 264–70.
Dipietro, Laura, Mark Ferraro, Jerome Joseph Palazzolo, Hermano Igo Krebs, Bruce T. Volpe, e Neville Hogan. 2005. “Customized Interactive Robotic Treatment for Stroke: EMG-Triggered Therapy”. IEEE transactions on neural systems and rehabilitation engineering : a publication of the IEEE Engineering in Medicine and Biology Society 13 (3): 325–34. doi:10.1109/TNSRE.2005.850423.
Duda, Richard O., Peter E. Hart, e David G. Stork. 2012. Pattern classification. John Wiley & Sons.
Eriksson, Jon, Maja J. Mataric, e C. Winstein. 2005. “Hands-off assistive robotics for post-stroke arm rehabilitation”. In Proc. IEEE International Conference on Rehabilitation Robotics (ICORR’05), 21–24.
Gibson, Alison E., Mark R. Ison, e Panagiotis Artemiadis. 2013. “User-Independent Hand Motion Classification With Electromyography”, outubro, V002T26A002. doi:10.1115/DSCC2013-3832.
Heijden, Ferdinand van der, Robert Duin, Dick de Ridder, e David M. J. Tax. 2004. Classification, Parameter Estimation and State Estimation: An Engineering Approach Using MATLAB. 1 edition. Chichester, West Sussex, Eng. ; Hoboken, NJ: Wiley.
68
“i-limb ultra | Touch Bionics”. 2016. Acessado julho 26. http://www.touchbionics.com/products/active-prostheses/i-limb-ultra.
Jiang, Ning, Strahinja Dosen, Klaus-Robert Müller, e Dario Farina. 2012. “Myoelectric control of artificial limbs—Is there a need to change focus”. IEEE Signal Process. Mag 29 (5): 152–150.
Johnson, Ernest W. 1980. “Practical electromyography”. Kay, Steve M. 1998. Fundamentals of Statistical Signal Processing, Volume II:
Detection Theory. 1 edition. Englewood Cliffs, N.J: Prentice Hall. Khezri, M., e M. Jahed. 2007. “A Novel Approach to Recognize Hand Movements Via
sEMG Patterns”. In 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 4907–10. doi:10.1109/IEMBS.2007.4353440.
Khezri, Mahdi, e Mehran Jahed. 2007. “Real-time intelligent pattern recognition algorithm for surface EMG signals”. Biomedical engineering online 6 (1): 1.
Konrad, Peter. 2005. “The abc of emg”. A practical introduction to kinesiological electromyography 1.
Kwakkel, Gert, Boudewijn J. Kollen, e Hermano I. Krebs. 2007. “Effects of Robot-Assisted Therapy on Upper Limb Recovery After Stroke: A Systematic Review”. Neurorehabilitation and Neural Repair, setembro. doi:10.1177/1545968307305457.
L. Johnson, Norman, Samuel Kotz, e N. Balakrishnan. 1995. Continuous Univariate Distributions, Vol. 2. 2 edition. New York: Wiley-Interscience.
Li, Xiaoyan, Ping Zhou, e Alexander S. Aruin. 2007. “Teager–Kaiser Energy Operation of Surface EMG Improves Muscle Activity Onset Detection”. Annals of Biomedical Engineering 35 (9): 1532–38. doi:10.1007/s10439-007-9320-z.
Lotte, Fabien, Marco Congedo, Anatole Lécuyer, Fabrice Lamarche, e Bruno Arnaldi. 2007. “A review of classification algorithms for EEG-based brain–computer interfaces”. Journal of neural engineering 4.
Merletti, Roberto, e Philip A. Parker. 2004. Electromyography: Physiology, Engineering, and Non-Invasive Applications. John Wiley & Sons.
Naik, Ganesh R., e Dinesh K. Kumar. 2012. “Identification of Hand and Finger Movements Using Multi Run ICA of Surface Electromyogram”. Journal of Medical Systems 36 (2): 841–51. doi:10.1007/s10916-010-9548-2.
Naik, Ganesh R., Dinesh Kant Kumar, Vijay Pal Singh, e Marimuthu Palaniswami. 2006. “Hand Gestures for HCI Using ICA of EMG”. In Proceedings of the HCSNet Workshop on Use of Vision in Human-computer Interaction - Volume 56, 67–72. VisHCI ’06. Darlinghurst, Australia, Australia: Australian Computer Society, Inc.
Ohn, Suk Hooh, Woo-Kyoung Yoo, Deog Young Kim, Seungho Ahn, Bora Jung, Ikjun Choi, Nam Jae Lee, e Kwang-Ik Jung. 2013. “Measurement of synergy and spasticity during functional movement of the post-stoke hemiplegic upper limb”. Journal of Electromyography and Kinesiology 23 (2): 501–7. doi:10.1016/j.jelekin.2012.10.001.
Raez, M.B.I., M.S. Hussain, e F. Mohd-Yasin. 2006. “Techniques of EMG signal analysis: detection, processing, classification and applications”. Biological Procedures Online 8 (março): 11–35. doi:10.1251/bpo115.
Sá, Antonio Mauricio F. L. Miranda de, Mauricio Cagy, Vladimir V. Lazarev, e Antonio Fernando C. Infantosi. 2006. “Spectral F-Test power evaluation in the EEG during intermittent photic stimulaton”. Arquivos de Neuro-Psiquiatria 64 (2A): 228–32. doi:10.1590/S0004-282X2006000200011.
69
Sá, Antonio Mauricio F. L. Miranda de, Humberto C. Thiengo, Ingrid S. Antunes, e David M. Simpson. 2009. “Assessing Time- and Phase-Locked Changes in the EEG during Sensory Stimulation by Means of Spectral Techniques”. In World Congress on Medical Physics and Biomedical Engineering, September 7 - 12, 2009, Munich, Germany, 2136–39. IFMBE Proceedings, 25/4. Springer Berlin Heidelberg.
Santos, Sibele. 2011. “Detecção de início de ativação muscular no eletromiograma com operador teager-kaiser”. Dissertação de Mestrado, Rio de Janeiro: Universidade Federal do Rio de Janeiro.
Santos-Couto-Paz, Clarissa C., Luci F. Teixeira-Salmela, e Carlos J. Tierra-Criollo. 2013. “The Addition of Functional Task-Oriented Mental Practice to Conventional Physical Therapy Improves Motor Skills in Daily Functions after Stroke”. Brazilian Journal of Physical Therapy 17 (6): 564–71. doi:10.1590/S1413-35552012005000123.
Scheme, Erik, e Kevin Englehart. 2013. “Training Strategies for Mitigating the Effect of Proportional Control on Classification in Pattern Recognition Based Myoelectric Control”. Journal of prosthetics and orthotics : JPO 25 (2): 76–83. doi:10.1097/JPO.0b013e318289950b.
Scott, R. N., e D. S. Dorcas. 1966. “A three-state myoelectric control system”. Med Biol Eng 4: 367.
Simpson, David M., Carlos J. Tierra-Criollo, Renato T. Leite, Eduardo J. B. Zayen, e Antonio F. C. Infantosi. 2000. “Objective Response Detection in an Electroencephalogram During Somatosensory Stimulation”. Annals of Biomedical Engineering 28 (6): 691–98. doi:10.1114/1.1305530.
“Sistemas protéticos de mãos mioelétricas — Ottobock”. 2016. Acessado julho 26. http://www.ottobock.com.br/prosthetics/membros-superiores/visao-geral-das-solucoes/sistemas-mioeletricos/.
Teo, Wei-Peng, e Effie Chew. 2014. “Is Motor-Imagery Brain-Computer Interface Feasible in Stroke Rehabilitation?” PM & R: The Journal of Injury, Function, and Rehabilitation 6 (8): 723–28. doi:10.1016/j.pmrj.2014.01.006.
Tierra-Criollo, Carlos Julio. 2001. “Monitorização objetiva da resposta à estimulação somatosensitiva utilizando parâmetros espectrais”. Rio de Janeiro - Brasil: Universidade Federal do Rio de Janeiro.
“WHO | Stroke, Cerebrovascular accident”. 2014. WHO. Acessado novembro 1. http://www.who.int/topics/cerebrovascular_accident/en/.
Zhang, Xu, Yun Li, Xiang Chen, Guanglin Li, William Zev Rymer, e Ping Zhou. 2013. “The Effect of Involuntary Motor Activity on Myoelectric Pattern Recognition: A Case Study with Chronic Stroke Patients”. Journal of neural engineering 10 (4). doi:10.1088/1741-2560/10/4/046015.
Zhou, Ping, Nina L. Suresh, e William Z. Rymer. 2007. “Model Based Sensitivity Analysis of EMG–Force Relation with Respect to Motor Unit Properties: Applications to Muscle Paresis in Stroke”. Annals of Biomedical Engineering 35 (9): 1521–31. doi:10.1007/s10439-007-9329-3.
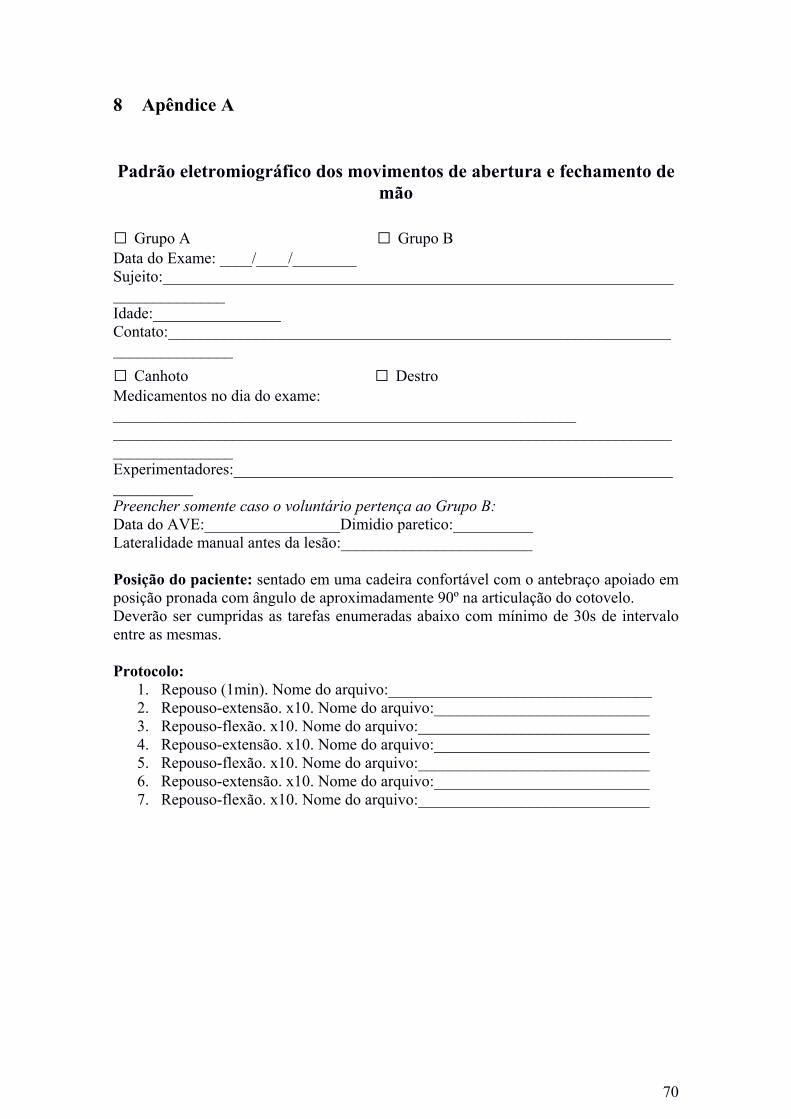
70
8 Apêndice A
Padrão eletromiográfico dos movimentos de abertura e fechamento de
mão
□ Grupo A □ Grupo B Data do Exame: ____/____/________ Sujeito:______________________________________________________________________________ Idade:________________ Contato:______________________________________________________________________________
□ Canhoto □ Destro Medicamentos no dia do exame: __________________________________________________________ _____________________________________________________________________________________ Experimentadores:_________________________________________________________________ Preencher somente caso o voluntário pertença ao Grupo B: Data do AVE:_________________Dimidio paretico:__________ Lateralidade manual antes da lesão:________________________ Posição do paciente: sentado em uma cadeira confortável com o antebraço apoiado em posição pronada com ângulo de aproximadamente 90º na articulação do cotovelo. Deverão ser cumpridas as tarefas enumeradas abaixo com mínimo de 30s de intervalo entre as mesmas. Protocolo:
1. Repouso (1min). Nome do arquivo:_________________________________ 2. Repouso-extensão. x10. Nome do arquivo:___________________________ 3. Repouso-flexão. x10. Nome do arquivo:_____________________________ 4. Repouso-extensão. x10. Nome do arquivo:___________________________ 5. Repouso-flexão. x10. Nome do arquivo:_____________________________ 6. Repouso-extensão. x10. Nome do arquivo:___________________________ 7. Repouso-flexão. x10. Nome do arquivo:_____________________________

71
Canal Músculo Posição do eletrodo MS
Direito (cm)
MS esquerdo
(cm) 1 Acelerômetro
2 Extensor Comum dos Dedos
Medida do epicôndilo lateral ao processo estilóide
do rádio com eletrodo no terço proximal.
3 Primeiro Interosseo Dorsal
(FDI)
Medida 3 cm abaixo da base metacarpofalangiana.
4 Extensor Curto do Polegar
Medida do epicondilo lateral ao processo estilóide
do rádio com eletrodo no terço distal.
5 Flexor Superficial dos Dedos
Medida do processo ósseo do rádio à cabeça da ulna.
Marcar linha média e posicionar o eletrodo na
região mais medial.
6 Flexor Profundo dos Dedos
Medida do epicôdilo medial à ulna. Posicionar o eletrodo
no terço proximal.
Afastar 1cm da ulna para região medial.
7 Flexor Longo do Polegar
Medida do epicôndilo lateral ao processo estilóide
do rádio com eletrodo no terço distal.
Medida do processo ósseo do rádio à cabeça da ulna.
Marcar linha média e posicionar o eletrodo na
região mais lateral.
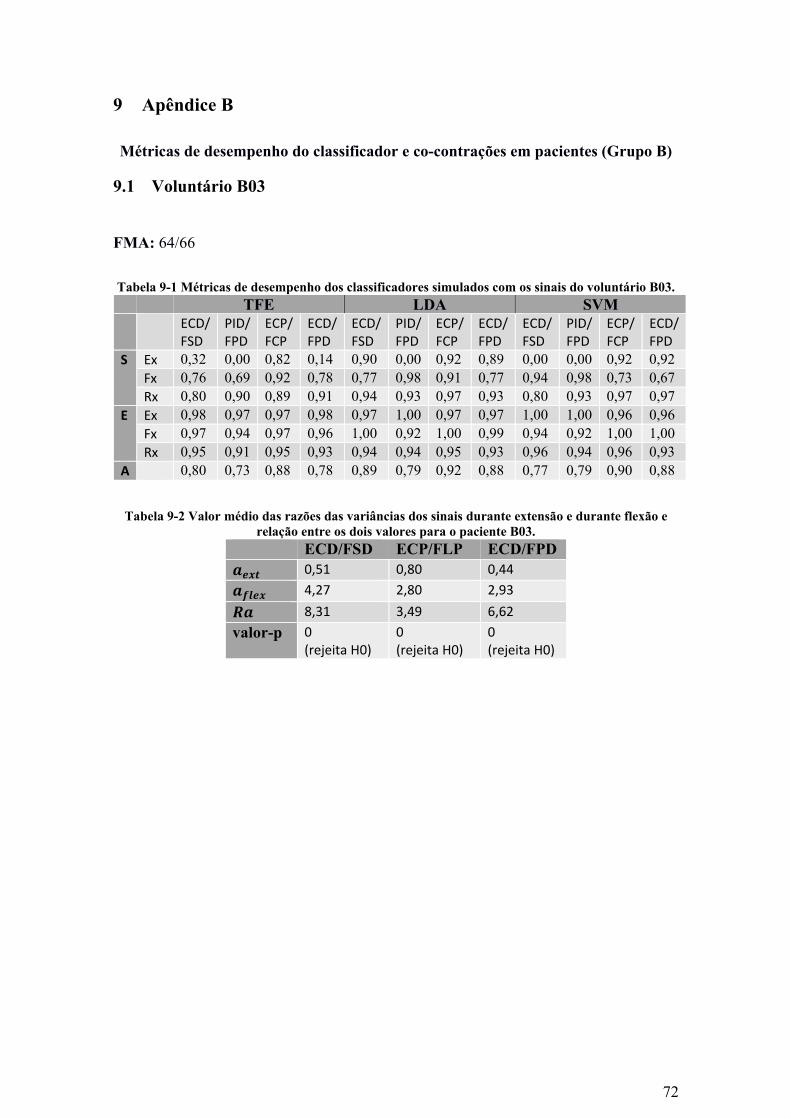
72
9 Apêndice B
Métricas de desempenho do classificador e co-contrações em pacientes (Grupo B)
9.1 Voluntário B03
FMA: 64/66
Tabela 9-1 Métricas de desempenho dos classificadores simulados com os sinais do voluntário B03. TFE LDA SVM ECD/
FSD PID/ FPD
ECP/ FCP
ECD/FPD
ECD/FSD
PID/ FPD
ECP/FCP
ECD/FPD
ECD/FSD
PID/ FPD
ECP/ FCP
ECD/FPD
S Ex 0,32 0,00 0,82 0,14 0,90 0,00 0,92 0,89 0,00 0,00 0,92 0,92Fx 0,76 0,69 0,92 0,78 0,77 0,98 0,91 0,77 0,94 0,98 0,73 0,67Rx 0,80 0,90 0,89 0,91 0,94 0,93 0,97 0,93 0,80 0,93 0,97 0,97
E Ex 0,98 0,97 0,97 0,98 0,97 1,00 0,97 0,97 1,00 1,00 0,96 0,96Fx 0,97 0,94 0,97 0,96 1,00 0,92 1,00 0,99 0,94 0,92 1,00 1,00Rx 0,95 0,91 0,95 0,93 0,94 0,94 0,95 0,93 0,96 0,94 0,96 0,93
A 0,80 0,73 0,88 0,78 0,89 0,79 0,92 0,88 0,77 0,79 0,90 0,88
Tabela 9-2 Valor médio das razões das variâncias dos sinais durante extensão e durante flexão e relação entre os dois valores para o paciente B03.
ECD/FSD ECP/FLP ECD/FPD 0,51 0,80 0,44
4,27 2,80 2,93
8,31 3,49 6,62
valor-p 0 (rejeita H0)
0 (rejeita H0)
0 (rejeita H0)

73
9.2 Voluntário B04
FMA: 59/66 Tabela 9-3 Métricas de desempenho dos classificadores simulados com os sinais do voluntário B04.
TFE LDA SVM ECD/
FSD PID/ FPD
ECP/ FCP
ECD/ FPD
ECD/ FSD
PID/ FPD
ECP/ FCP
ECD/ FPD
ECD/ FSD
PID/ FPD
ECP/ FCP
ECD/ FPD
S Ex 0,78 0,44 0,53 0,93 0,69 0,44 0,48 0,94 0,96 0,44 0,51 0,96Fx 0,84 0,95 0,12 0,98 0,85 0,86 0,20 0,95 0,48 0,87 0,20 0,72Rx 0,69 0,47 0,20 0,35 0,56 0,47 0,38 0,64 0,68 0,47 0,41 0,66
E Ex 0,98 0,97 1,00 0,97 0,98 0,96 1,00 0,96 0,97 0,96 1,00 0,96Fx 0,96 0,96 1,00 0,93 0,96 0,97 0,95 0,97 0,99 0,97 0,97 1,00Rx 0,97 0,94 0,98 0,96 0,97 0,94 0,97 0,96 0,96 0,94 0,97 0,96
A 0,84 0,77 0,63 0,80 0,80 0,76 0,66 0,85 0,81 0,76 0,67 0,84
Tabela 9-4 Valor médio das razões das variâncias dos sinais durante extensão e durante flexão e relação entre os dois valores para o paciente B04.
ECD/FSD ECP/FLP ECD/FPD 32,86 0,04 8,71
7,50 1,38 0,73
0,23 38,66 0,08
valor-p 0,92 (aceita H0)
0 (rejeita H0)
0,57 (aceita H0)
9.3 Voluntário B05
FMA:62/66 Tabela 9-5 Métricas de desempenho dos classificadores simulados com os sinais do voluntário B05. TFE LDA SVM
ECD/ FSD
PID/ FPD
ECP/ FCP
ECD/FPD
ECD/FSD
PID/ FPD
ECP/FCP
ECD/FPD
ECD/FSD
PID/ FPD
ECP/ FCP
ECD/FPD
S Ex 0,32 0,38 0,82 0,24 0,65 0,43 0,81 0,41 0,65 0,44 0,60 0,41
Fx 0,88 0,89 0,80 0,90 0,80 0,88 0,81 0,90 0,88 0,89 0,81 0,90
Rx 0,60 0,56 0,53 0,63 0,59 0,55 0,53 0,72 0,65 0,52 0,50 0,72
E Ex 1,00 0,95 0,99 1,00 0,99 0,94 0,99 1,00 0,99 0,95 1,00 1,00
Fx 0,94 0,95 0,99 0,94 0,99 0,96 0,99 0,97 0,98 0,95 0,98 0,97
Rx 0,95 0,92 0,99 0,95 0,97 0,91 0,99 0,96 0,96 0,93 0,98 0,96
A 0,75 0,71 0,82 0,74 0,79 0,70 0,82 0,80 0,81 0,70 0,78 0,80
Tabela 9-6 Valor médio das razões das variâncias dos sinais durante extensão e durante flexão e relação entre os dois valores para o paciente B05.
ECD/FSD ECP/FLP ECD/FPD 28,20 4,50 33,74 2,75 1,58 6,17
0,10 0,35 0,18 valor-p 0,74
(aceita H0) 0,79 (aceita H0)
0,88 (aceita H0)
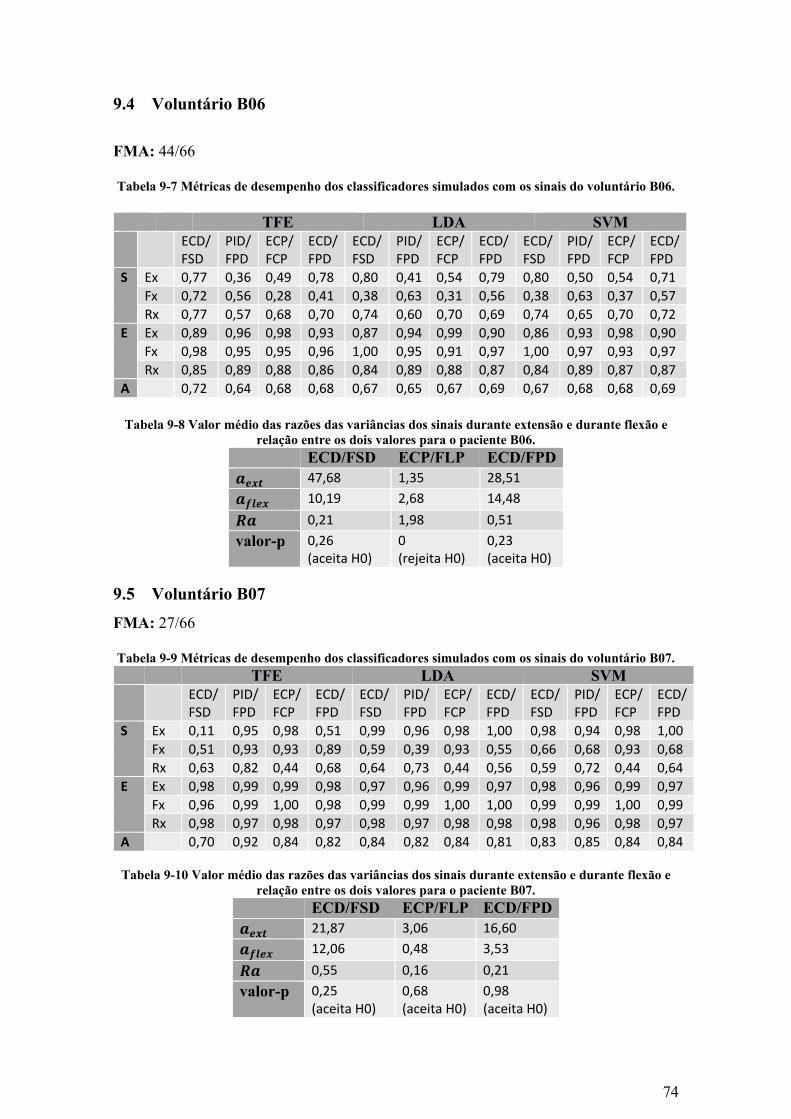
74
9.4 Voluntário B06
FMA: 44/66 Tabela 9-7 Métricas de desempenho dos classificadores simulados com os sinais do voluntário B06.
TFE LDA SVM ECD/
FSD PID/ FPD
ECP/ FCP
ECD/FPD
ECD/FSD
PID/ FPD
ECP/FCP
ECD/FPD
ECD/FSD
PID/ FPD
ECP/ FCP
ECD/FPD
S Ex 0,77 0,36 0,49 0,78 0,80 0,41 0,54 0,79 0,80 0,50 0,54 0,71
Fx 0,72 0,56 0,28 0,41 0,38 0,63 0,31 0,56 0,38 0,63 0,37 0,57
Rx 0,77 0,57 0,68 0,70 0,74 0,60 0,70 0,69 0,74 0,65 0,70 0,72
E Ex 0,89 0,96 0,98 0,93 0,87 0,94 0,99 0,90 0,86 0,93 0,98 0,90
Fx 0,98 0,95 0,95 0,96 1,00 0,95 0,91 0,97 1,00 0,97 0,93 0,97
Rx 0,85 0,89 0,88 0,86 0,84 0,89 0,88 0,87 0,84 0,89 0,87 0,87
A 0,72 0,64 0,68 0,68 0,67 0,65 0,67 0,69 0,67 0,68 0,68 0,69
Tabela 9-8 Valor médio das razões das variâncias dos sinais durante extensão e durante flexão e
relação entre os dois valores para o paciente B06. ECD/FSD ECP/FLP ECD/FPD
47,68 1,35 28,51
10,19 2,68 14,48
0,21 1,98 0,51
valor-p 0,26 (aceita H0)
0 (rejeita H0)
0,23 (aceita H0)
9.5 Voluntário B07
FMA: 27/66 Tabela 9-9 Métricas de desempenho dos classificadores simulados com os sinais do voluntário B07.
TFE LDA SVM ECD/
FSD PID/ FPD
ECP/ FCP
ECD/FPD
ECD/FSD
PID/ FPD
ECP/FCP
ECD/FPD
ECD/ FSD
PID/ FPD
ECP/ FCP
ECD/FPD
S Ex 0,11 0,95 0,98 0,51 0,99 0,96 0,98 1,00 0,98 0,94 0,98 1,00
Fx 0,51 0,93 0,93 0,89 0,59 0,39 0,93 0,55 0,66 0,68 0,93 0,68
Rx 0,63 0,82 0,44 0,68 0,64 0,73 0,44 0,56 0,59 0,72 0,44 0,64
E Ex 0,98 0,99 0,99 0,98 0,97 0,96 0,99 0,97 0,98 0,96 0,99 0,97
Fx 0,96 0,99 1,00 0,98 0,99 0,99 1,00 1,00 0,99 0,99 1,00 0,99
Rx 0,98 0,97 0,98 0,97 0,98 0,97 0,98 0,98 0,98 0,96 0,98 0,97
A 0,70 0,92 0,84 0,82 0,84 0,82 0,84 0,81 0,83 0,85 0,84 0,84
Tabela 9-10 Valor médio das razões das variâncias dos sinais durante extensão e durante flexão e relação entre os dois valores para o paciente B07.
ECD/FSD ECP/FLP ECD/FPD 21,87 3,06 16,60
12,06 0,48 3,53
0,55 0,16 0,21
valor-p 0,25 (aceita H0)
0,68 (aceita H0)
0,98 (aceita H0)

75





























