Embed Size (px)
Citation preview

~ - ~ COMPUTER AIDED
GEOMETRIC DESIGN
EI~SEVIER Computer Aided Geometric Design 15 (19981 459-473
The 42 equivalence classes of quadratic surfaces in anne ;z-space
J6rg Peters a'*'l, U l r i ch R e i f b'3
a Department o1 Computer Science, Puntue Universit3: West lxl/ilvette, IN 47907-139& USA b Mathematical Institute A. Universi O' O['Stuttgart, D-70511, Stutt~ rt 80, Germany
Received October 1996: revised August 1997
A b s t r a c t
We establish an exhaustive catalogue of 42 equivalence classes of bivariate quadratic surfaces in affine ~;,-space. Here two surfaces belong to the same class if they differ only by zero components or b? affine transformations of domain and range. ,~) 1998 Elsevier Science B.V.
1. Introduction
Recently, elegant characterizations of rational quadratic surfaces in projective 3-space were given by Degen (1996), and independently by Coffman et al. (1996). The subject of this report is a classification of quadratic surfaces in aJfine ~>space. We establish an exhaustive catalogue of 42 equivalence classes 3 where polynomials are identified that diffc, r only by zero components, or can be obtained from one another by nonsingular a~ne tramJbrmations of domain and range.
The validity of separate equivalence classes is established by associating with each class a unique set of invariants. Completeness is shown constructively by explicit spec- ification of transformations for arbitrary quadratic maps.
The case of bivariate quadratic maps, as discussed here, is special in the sense that it decomposes into a,finite number of equivalence classes. Comparing the number of system parameters and the degrees of freedom provided by affine transformations of domain and
* Corresponding author. E-mail: [email protected]. I Supported by NSF National Young Investigator Award 9457806-CCR. 3 SuF, ported by BMBF Projekt 03-HO7STU-2. E-mail: [email protected].
The specilic finite number of equivalence classes gives a nontrivial answer (resp. question) to the famous
question (resp. answer) presented in D. Adam's book "The Hitchhiker'~ Guide to the Gahtxv".
0167-8396/98/$19.00 © 1998 Elsevier Science B.V. All rights reserved. P L I S 0 1 6 7 - 8 3 9 6 ( 9 7 ) 0 0 0 4 3 - 5

460 J. Peters', U. Reif / Computer Aided Geometric Design 15 (1998) 459~173
range shows that this cannot be expected for polynomial maps in more variables or of higher degree.
2 . D e f i n i t i o n s a n d n o t a t i o n s
For A some matrix denote by Ap:q,,j.:.~ the sub-matrix obtained by selecting all rows and columns with indices in [p, q] and [r, s], respectively. In sequential form A is specified line by line, separated by semi-colons. Example: Let A := [1,3, 0; 2, 0, 1] then
(, 0) ° 0) A = 2 0 1 ' 1 "
With M an ( n × 5 ) - m a t r i x , m an n-vector, and u := (u 2, v 2, uv, u, v) y the general form of a quadratic map q := R 2 --* R '~ is
q(u, v) = M u + m. (2.2)
The set of all quadratic maps is denoted by Q. The sub-matrices of M corresponding to the linear and quadratic monomials are
L := ~I1:,~,4:5, Q : = Mira, l :3- (2.3)
An affine change t~'coordinates in R " is given by
= A z + a, (2.4)
where A is a regular (zt x n)-matrix and a is an n-vector. An affine change o f parameters is expressed in terms of a (2 x 3)-matrix R according to
~7 = R , (2.5)
where R is regular in the sense that detRl:2.1:2 # 0. With R := [a, b, c; d, e, f] the induced change of u_ is given by
a 2 b 2 2ab 2ae 2be
0 0 a b 0 0 d e
c 2
f
(2.6)
Note that detRl:5,j:5 = (ae - bd) 4, so r a n k R = 5 by regularity of R. The equivalence relation in R ~ induced by (2.5) is denoted by E2. Let C be the quotient
set of conic sections by E2. The elements of C are assigned the following icons:
o ellipse
point
empty set
x hyperbola
parabola
[] plane
x crossing lines
~-- parallel lines
• - - - single line

J. Peters, U. Reif / Computer Aided Geometric Des&,n 15 (1998) 459--473 461
Further, we introduce two icons for the equivalence classes of the following point sets:
• ~ _ l - two distinct points ] three distinct points 1.
3. Equivalence classes
In Section 3.1 we define an equivalence relation E ~ in the space of quadratics. A set of invariants is specified in Section 3.2. Finally, in Section 3.3 all 42 equivalence classes of (2 with respect to Ec2 are listed and characterized in terms of inwtriants.
3.1. The equivalence relation
The space Q is endowed with an equivalence relation E7c2 which identifies quadratic maps that differ only by affine transformalions of domain and range or by zero coor- dinales. More precisely, two maps qi = .,1Ii'1, + m~ in A" ' , i 6 { 1.2}, are equivalent if
(i) r~j = 'u2 and there exists a vector ,. 6 R" ' such that
ql - - qe + (~. I3.1
(ii) ',~l -- *~2 and there exist regular matrices A and R corresponding to affine changes of coordinates and parameters such that
a[~ = AM2B. {3.2)
(iii) ~ll # /1e and
, , l , :3 ,
It is our goal to determine the equivalence classes of Q with respect to the equivalence relation EQ generated by (i), (ii), (iii). Each equivalence class will be associated with a particularly simple representative, also referred to as normal form.
Throughout, relation (i) is applied so that q(0, 0) = 0. Further, we may assume that the rows of M are linearly independent or that M = [0.0, 0, 0, 0]. Otherwise, if rank I I r / < n there is a change of coordinates A such that the first n ' rows of A M are linearly independent and the remaining rows are all zero. Then the zero rows can be deleted by relation (iii). To sum up, all quadratic maps to be considered subsequently are either trivial, i.e. q(u, ~) = 0, or of type q(u ,v) -- AlE, where the rows of M are linearly independent. In particular, the maximal number of components of q is 5.
3.2. hlvariants
In order to characterize the equivalence classes of Q we specify a set of properties which are invariant with respect to E o . With a slight abuse of notation, R denotes both the matrix as defined in (2.5) and the induced transformation of R 2.
• rank 3,[ is invariant since A and/~ are regular matrices.

462 J. Peters. U. Reif / Computer Aided Geometric Design 15 (1998) 459-473
• r ankQ is invariant since A and/~.1:3.1:3 are regular matrices. • The singular set Crq of a quadratic map q is defined by
oh, := { (u ,v ) E R2: rank[q,~(u,v),q, ,(u,v)] < 2}. (3.4)
It turns out that CTq is either a conic section, or consists of 2 or 3 distinct points. Denote equivalence classes with respect to E2 by [. ]~:_~, then the set
r q := [~,,]E_~ C C U { - . , . • .} (3.5)
is invariant, since CTAqoR+~ = R-lc~q. • Let A E JR"\{0} and/1, E JR. The preimage of the intersection of a quadratic map
q E Q in JR" with the hyperplane h: ATx = / 1 is a conic section determined by
7rq(A,#) := { ( m y ) E Re: ATq(u,v) = tz}. (3.6)
The set of all possible types of conic sections,
l l q := {[Trq(A,l,)]E~: A E R " \ { 0 } , # E JR} C C, (3.7)
is invariant, since 7rAqo/?+,(A, #) = R.-JTrq(ATA,/~ - ATa). • The set of different types of preimages of hyperplanes which intersect the singular
set,
I R}cC, (3.8)
is invariant, since 7rAqoi~+,~(A, p.) (? Onqol~+o = R I (Trq(ATA, p. - ATa) U/o-q).
3.3. Result
Tables l and 2 provide a complete classification of quadratic maps in R"' with respect to the given equivalence relation EQ. Each class is uniquely characterized by a set of invariants. The first column contains a name for the equivalence class, coded by
Type = rank M - r ankQ - auxiliary label.
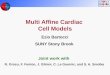
The second column shows the normal form, i.e. a particularly simple representative of the equivalence class. The next eight columns indicate whether a particular type of conic section is contained in Hq. The type of the singular set ~'q is specified in the last column. With two exceptions, rank M, rank Q, FIq, ~q characterize the class. Only Types 2- l-2a,b and 3-3-2a,b require a further distinction. Here and only here the elements of H~ are marked by a square (,.). Plots of the normal forms in R 2 and R 3 are depicted in Figs. l and 2.
Example . Let us briefly consider Cases 2-1-2a and 2-l-2b. The normal form of Case 2-1-2a is given by q('u,v) = (uv, u + v). Here, M =
[0,0, 1 , 0 , 0 ; 0 , 0 , 0 , 1, 1] and Q = [0,0, 1;0,0,0] , hence r a n k M = 2 and rankQ = 1. The Jacobian of q is JOt, v) = [v, u ; l , 1], so the singular set is c~q = {(u, v): u = v} and ~q = {- -} . Further, 7rq(A,p,) is defined by Aluv + A2(u + v) = It. The quadratic form is negative definite or zero, so only hyperbola, crossing lines and single line come

J. Peters. U. Reif / Computer Aided Geometric Design 15 (1998) 459---473
Table 1
Equiva lence c lasses for rank 3.1 = 0, I, 2.
463
Type q(u, v) o (;1 ~ x - - ~ ' ,
0-0 0 •
1-0 u • [ ]
1 - I - 1 u 2 + v 2 • • • [ ]
I - 1 - 2 u. 2 v 2 • • [ ]
I - I -3a u : + v • [ ]
1 - 1 - 3 b u 2 • • • [ ]
2 - 0 u. v • 0
2 - I - I u, 2 + v 2 , ~u • • • • --
2- 1-2a u , v . / / - - 'u • • • - -
2- 1-2b 'u,u, u • • •
2-1-3a 1t2~ ~ • • • • - -
2- 1 - 3 b u 2, u • • • []
2-1-3c u 2 + v, u • • 0
- - 1! 2 9_")_ ] [ t ,/12, • • • • • • • X
2-2- I b ~t. 2 + v, v 2 + u • • • • • •
2-2-1 c u 2 + v, v 2 • • • • • • • • ×
v_2_9 a
2-2-2b u 2 + I~, ~lv • • •
2-2-2c u ' , u v + ~' • • • • •
2-2-3a ~z 2 - v-, u v • •
9 V 2-2-3b ~ v- , ~ , + 'u. • • ,v
in to a c c o u n t f o r Hq. I n d e e d , all t h r e e t y p e s o c c u r , f o r i n s t a n c e u v = 1, 'uv = 0. u + I~ 0.
Al l t h r e e s p e c i m e n i n t e r s e c t t h e s i n g u l a r l ine u = v, h e n c e H q = IIq.
T h e n o r m a l f o r m o f C a s e 2 - 1 - 2 b is g i v e n b y q ( ~ , v ) = ('u.v,u). H e r e , M =
[0 ,0 , 1 . 0 , 0 : 0 . 0 . 0 , 1 ,0 ] a n d Q = [ 0 , 0 . 1 ; 0 , 0 , 0 ] , h e n c e r a n k M = 2 a n d r a n k Q - 1.
T h e J a c o b i a n o f q is J ( u , v) = [v , 'u ; 1,01, so t he s i n g u l a r se t is cr,~ = { ( u , e): u = 0}
a n d .~Pq - { - - } . F u r t h e r , rCq(A, ff) is d e f i n e d b y Al~tv + Aeu. = p . T h e q u a d r a t i c f o r m
is n e g a t i v e de f i n i t e o r z e ro , so o n l y h y p e r b o l a , c r o s s i n g l i n e s a n d s i n g l e l ine c o m e in to
a c c o u n t f o r Hq. I n d e e d , all t h r e e t y p e s o c c u r , fo r i n s t a n c e .wv = 1. 'uv = 0, u = 0. A g a i n ,
t he s p e c i m e n fo r c r o s s i n g l i ne s a n d s i n g l e l ine i n t e r s e c t t h e s i n g u l a r l ine ~ = 0. H o w e v e r .
s u b s t i t u t i n g u = 0 i n t o A l u v + A2u = It y i e l d s # - O, a n d t he e q u a t i o n u ( A i ~, + A2) = 0
c a n n o t d e s c r i b e a h y p e r b o l a , h e n c e H,~ = { x , - - } .

464 J. Peters . U. R e i f / C o m p u t e r A i d e d Geome t r i c Des ign 15 (1998) 4 5 9 - 4 7 3
Table 2 Equivalence classes for rank M = 3, 4, 5.
Type q ( u , v ) o 0 ~ × Z
3-1-1 u 2 + v 2, u , v • • • •
3-1-2 uv, u, v • • •
3-1-3 u 2, u, v • • • •
3-2-1a 1/~2~ v2, ~ -- 'u • • • • • • • •
3-2-1 b u 2 , v 2 , u • • • • • • • •
3-2-1c u 2, ?32 ~- ~ , 'U • • • • • • • •
3-2-2a u 2, uv, v • • • • • •
3-2-2b u 2 + v , u v , u • • • •
3-2-2c ~t 2 , '~'U~ /Z • • • • •
3-2-3 u 2 - v 2, u v , u • • •
0
0
3-3-1a u 2, 1;2~ ? / v • • • • • • •
3 - 3 - 1 b 1z2, 1:2, u~t~ + 'u, • • • • • • • •
3 - 3 - I C u 2, V 2 , U V ~- U ~- V • • • • • • • •
3-3-2a u 2 , / ~ 2 ~- 11, UV • • • • • J • •
3-3-2b 1, 2, v 2 + u , u v - v • • • • • • • •
4-2-1 U 2 ~ V 2 ~ U , V • • • • • • • • 0
4-2-2 u 2, uv, u, v • • • • • • 0
4-2-3 u 2 - v 2, u v , u , v • • • 0
4-3-1a U 2, V2, ll, V~ U • • • • • • • •
4-3- I b u 2 + v , v 2, u v , u • • • • • • • • 0
5-3 u 2, v 2 , u v , u , v • • • • • • • • 0
It r e m a i n s to show that the list o f e q u i v a l e n c e c lasses is exhaus t ive• Th i s is done in a
cons t ruc t i ve way by s h o w i n g h o w to t r ans fo rm an arb i t ra ry quadra t ic m a p to one of the
g i v e n n o r m a l forms. B e i n g s o m e w h a t technica l , this par t is p o s t p o n e d to the Append ix .
Appendix
In v iew of the cons i de r ab l e n u m b e r o f cases to be treated, the var ious s teps are on ly
out l ined . Veri f icat ion and c o m p l e t i o n o f the de ta i l s is s t ra igh t fo rward , espec ia l ly w h e n
suppor t ed by a c o m p u t e r a lgeb ra sys tem. For the sake o f clarity, the sec t ion labels are
c h o s e n such that the first two n u m b e r s co inc ide wi th r ank M and rank Q, respect ively .

Typ
e 2-
2-2c
T
ype
2-2-
lc
Typ
e 2-
1-3c
T
ype
2-l-
2b
Typ
e 2-
0
' i
-
Ill
[11
irr[
lll!
Typ
e 2-
2-3a
T
ype
2-2-
2a
Typ
e 2-
2- I
a T
ype
2- I-
3a
Typ
e 2-
1-1
F.~,
•
b I t .
..
.
,~
~r
'!
ll
,'
iii,
:,!
:i~
!I!i
~,
j ",~
Typ
e 2-
2-3b
T
ype
2-2-
2b
Typ
e .-
~- I
b T
~pe
2- 1
-3b
Typ
e 2-
1-2a
//
'\\\\x,
Fig, I Qu
adra
tic
map~
in _~:-.
"o
e~
~o
e~
e~

Typ
e 2-
3- lc
Typ
e 3-
3- la
T
ype
3-3-
2a
Typ
e 3-
3-2b
~iiiiiii
ii~ ¸ ii~i,
iiii =,
~ ~
,~ ~iiii
iiiiiiii
i~iiiii
i!!!i~,
~!~i!
iliiiiii
i ~
Typ
e 3-
2-3
Typ
e 3-
2-2b
~iiiiiU
......
..
Typ
e 3-
3-1b
Typ
e 3-
2-2a
ik,
Typ
e 3-
2-2c
Fig.
2 Q
uadr
atic
map
s in
N3.
Typ
e 3-
2-1a
I ; !~
i~(ii!!? ~ ~?
Typ
e 3-
2- lb
Typ
e 3-
2-1c
Typ
e 3-
1-1
Typ
e 3-
1- 2
Typ
e 3-
1- 3
5'-
~Z
e~
e~ I 4~

.I. Peters, U. Reif / Computer AMed Geometric Desi~,,n 15 (199~, ') 459-473 467
A.1. Quadratic maps in R
A.I.O. rank Q = 0
rank L = 0 yields Type 0-0. rank L 1 yields Type 1-0 by a straightforward change of parameters.
A . I . I . rankQ = I
Types 1-I- l , 1-1-2, 1-1-3a and I-1-3b are obtained by the standard main axes trans- formation and quadratic completion.
A.2. Quadratic maps in 2 2
A.2.0. rank Q) 0
rank Q 0 implies rank L = 2. Thus, setting A := L i yields Type 2-0.
A.2.1. r a n k Q = 1
Change coordinates so that the second row of Q is zero. Then transform the first row to a one-dimensional normal form with rank Q = 1. Note that the second row o1 L is non-zero since rank 3 [ = 2.
A.2.1.1. First
The matrix
0001 _1I : 0 0 p q
is transformed to Type 2-1-1 by means of
H . - . A : = p 2 + c t 2 1)2 + q2 q _t) 0 "
row o f Type l - l - I
A.2.1.2. First row o, e T37w I -1-2
The matrix
[0 0 l 0 0 ] (A.2.3) M := 0 0 0 p q
is transformed in dependence on t;. q- (a) pq ¢ 0 yields Type 2-1-2a by scaling (b) p 0, q ¢: 0 and p :~ 0. q = 0 both yield Type 2-I-2b by scaling and eventually
exchanging (u. ~,).

468 J. Peters, U. Reif / Computer Aided Geometric Design 15 (1998) 459-473
A.2.1.3. First row o f Type 1-1-3x The matrix
[;ooo 1 , ,- { 0 , 1 } M : = 0 0 p
is transformed in dependence on p, q, r. (a) q ¢ 0 yields Type 2-1-3a by means of
[ : 1 [1 1 0 rp 2q A :=
R : = _ p / q 1/q ' 0
(b) p ¢ 0, q = O,r = 0 yields Type 2-1-3b by scaling. (c) p ¢ 0, q = O,r = 1 yields Type 2-1-3c by scaling.
A.2.2. rankQ = 2
(A.2.4)
(A.2.5)
Denote the j th column of Q by Qj. We may assume that det[Qi, Q2] • 0. Otherwise, if det[Q,, Q2] = 0 then det[Qi,Q3] ¢ 0. Reparametrization with R := [1,1,1; 0, 1,0]
yields ~) = [Q,, Qj + Q2 + Q3, 2Q1 + Q3] and det[Qi, Q2] ~ O. Changing coordinates with A := [QI, Q2] -I gives
E,oO:] 1 " (A.2.6)
A.2.2.1. pq < 1 We may assume that p = q = 0. Otherwise, if p ¢ 0 set w := x/l - pq and
H : = - 1 - w - l + w ' (2pw) ~ ( l + w ) 2 p2 (A.2.7)
yielding Q = [1,0,0; O, 1,0]. If p = 0, q ¢ 0 exchange both (u ,v) and (z j , z2 ) and proceed as before. So, after quadratic completion, we have to discuss
['o ° ° ° 'l M : = 1 0 s 0 (A.2.8)
in dependence on r, s. (a) r = s = 0 yields Type 2-2-1a. (b) r ¢ 0, s ¢i 0 yields Type 2-2-1b by scaling. (c) r = 0, s ¢ 0 and r ¢ 0, s = 0 both yield Type 2-2-1c by scaling and eventually
exchanging (u, v) and (zl , z2).
A.2.2.2. pq = 1 By scaling, we can obtain p = q = 1. Then setting
[ 001 ['0 '1 - 1 1 , A := (A.2.9) R : = 0 - 1 1
yields Q = [1,0, 0; 0,0, 1]. So, after quadratic completion, we have to discuss E ooo:] M := 0 1 0 (A.2.10)

J. Peters, U. Rei['/ Computer Aided Geometric Design 15 (1998) 459~473 469
in dependence on r, s. (all r = ,s = 0 yields Type 2-2-2a. (b~ r ¢ 0 yields Type 2-2-2b by means of
[ ' 0 - '~ /3 1 /7 := 2,s/3r l / r - 4 s 2 / 9 r '
(cl r = 0, s ¢ 0 yields Type 2-2-2c by scaling.
A := 2,s/3 " (A.2.11 )
A.2.2.3. pq > By scaling,
H : = [ 0 1
yields Q = [1.
['0 , o 0 o l M := 0 1 r' ,s
in dependence on r, s. (a) r = ~ = 0 yields Type 2-2-3a.
1 we can obtain p = q > 1. Then setting u' := X/p 2 - 1 and
] '01 - p / w 0 A : = (A.2.12) 1/ u' 0 " L -~v / p2
- 1 , o; o, o, 1]. so, after quadratic completion, we have to discuss
(A.2.13)
(b) r 2 +,s 2 > 0 yields Type 2-2-3b as follows: We may assume that r ¢ 0. Otherwise, exchange ('u, v) and replace :~'1 by -:r~. Define the polynomials
f(:E) 1 : 1 ' 3 ":3 Jr- 3 s z 2 - 3'r:c -- .s,
g(:r) := sz 3 - 3r:c 2 - 3 s z + r'. (A.2.14)
and choose t~ so that f (~ ) = 0. Note that 9(h;) ¢ 0 since the resultant of f and 9 is res (f, 9) = - 6 4 ( r2 + s2) ¢ 0. Then, the transformation matrices are
1 [ - 9 ( ~ ) ~'9(~:) 2 t ~ ( - , ' ~ ; 2 - 2 , ~ h + r ) ] R . - (1 + K2) ~ tW(K,) .q(a:) 2g(,sa "2 - 2 ra - s ) "
[1 (/'C]-) 2 ~.2 h'- 1 4~ A . - (1 + l - g 2 - (A.2.15)
A.3. Quadrat ic maps in R 3
A.3. I. rankQ - 1
rank Q = 1 implies rank L = 2. Change coordinates so that the second and third row of Q are zero. Transform the first row to a one-dimensional normal form with rank Q = 1. Change coordinates so that L = [0, 0; 1,0; 0, 1]. Thus,
• First row of Type l- 1-1 yields Type 3-1-1. • First row of Type 1-1-2 yields Type 3-1-2. • First row of Type 1- l-3a or Type 1-1-3b yields Type 3-1-3.

470 J. Peters. U. Reif / Computer Aided Geometric Design 15 (1998) 459-473
A.3.2. rank Q = 2
Change coordinates so that the third row of Q is zero. Then transform the first two rows to a two-dimensional normal form with rank Q = 2. Note that the third row of L is non-zero.
A.3.2. I. First two rows of Type 2-2-1x The matrix
A I : = 1 0 .s , ( r , s ) E { ( 0 , 0 ) , ( l , 1 ) , ( 1 , 0 ) } (A.3.1) 0 0 p
is transformed in dependence on p, q, r, ~. (a) p ¢ 0, q ¢ 0 yields Type 3-2-1a by means of
qO "/P • (A.3.2) 1/p 0 rp /2q] A := - ,s R : = 0 l / q , sq /ZpJ ' 0
(b) p = r = s = 0. q ¢ 0, q = r = ~ = 0 , p C 0, a n d p = . s = 0, r = l , q : ~ 0 all yield Type 3-2-1b by scaling, eventually exchanging (u, v), and eventually applying a straightforward change of coordinates.
(c) ' r = s = 1,p = O,q ¢ O, r = ~s = l , p ¢ O,q = O, and q = s = O,r' = l , p ¢ 0 all yield Type 3-2-1c by scaling, eventually exchanging (~L, c), and eventually applying a straightforward change of coordinates.
A.3.2.2. First two rows o f Type 2-2-2x The matrix E 000 1
M : = 0 1 0 ,s , (r',,s) E { ( 0 , 0 ) , ( 1 , 0 ) , ( 0 , 1 ) } (A.3.3) 0 0 p q
is transformed in dependence on p, q, 'r, s. (a) q ¢; 0 yields Type 3-2-2a by means of
l o , p /2q ] R : = _ p / q 1/q p ( r p + Z s q ) / Z q 2 J '
1 o ] q - ( 3 r p 2sq) /2q A : = ~ 0 +l J (1.3.4)
(b) q = ~ = 0, p ¢ 0, r = 1 yields Type 3-2-2b by scaling. (c) q = 7" = 0, p ¢ 0 yields Type 3-2-2c by means of
l / p 0 ,~ R := 0 1 , A := p . (A.3.5)
0

J. Peters. U. Reif / Computer Aided Geometric Desi~zn 15 (1998; 45%-473 471
A.3.2.3. Firs't two rows of Type 2-2-3x The matr ix
[ °1 1 1 0 0
M : 0 0 I r , ' r ~ {0 .1} (A.3.6) 0 0 0 p q
is t ransformed to Type 3-2-3 by
I [ p q pqr ] p2 + q2 q _ p _q2 r "
[p2 q2 4pq 2qr(q2 _ 3pZ)/(p2 + q2) ?
A := I I Pq q2 _ p2 .rp(p2 __ 3q2)/(p2 + q2) ] . (A.3.7)
L o 0 1
A.3.3. rank Q = 3
Changing coord ina tes by A : = Q-L and quadrat ic comple t ion yie lds
'°°°o] M : = 0 1 0 .s . (A.3.8) 0 0 1 p q
A.3.3./. (r, .4) = (0, 0) (a) p = q -- 0 y ie lds Type 3-3-1a by scaling. (b) p = 0. q ~ 0 and p :/- 0. q = 0 both yie ld Type 3-3-1b by scal ing and eventua l ly
exchang ing (u, v) and (:r l , :r2). (c) pq : / 0 yie lds Type 3-3-1c by scaling.
A.3.3.2. (r, .s) # (0, 0) We may assume that r ¢ 0. Otherwise, exchange (~u, c) and (:rl, z2). Let
.f(:c) : = c:r 3 - 2q3:2 - 2pa" + ,~
and choose t,',
R : A : = 1 - 2 t ; ~: A//' " - ~ A / / , - l / h (A + ~:)/h
and subsequent quadrat ic comple t ion yie lds
M : 1 0 1 , 0 1 p q
which is t ransformed in dependence on the new values for p, q. (a) p = q = 0 y ie lds Type 3-3-2a. (b) f - + 2q < 0 y ie lds Type 3-3-2b by means of w : = ~ / - p 2 / 2 - q and
(A.3.9)
A so that f ( ~ ) = 1 and J (A) = 0. Thus, h : = A - t~ ¢ 0. A p p l y i n g
(A.3.10)
(A.3.1 I)

472 ,L Peters, U. Reif / Computer Aided Geometric Design 15 (1998) 459~t73
R:=[-q o o ] p/2 w - p / 2 ' I'/q2 ° ° l
A : : (p/2qw) 2 l / w 2 p /qw 2 . - p / 2 w q 2 0 - 1/wq
(A.3.12)
(c) p2 q._ 2q/> 0, (p, q) ¢ (0, 0) yields no new type but either Type 3-3-Ib or 3-3-1c as follows: Let
g(~g) := X 2 -- 2px - 2q (A.3.13)
and chose a root n := p 4- V/p 2 + 2q so that ~ ~ 0. Then
ol E 'j 2° °] R := 1 q/n ' A := 1/~ 1 - 2 / n -1/~ o l/,~ yields
(A.3.14)
I i 0 0 0 0 ] M := 1 0 0 0 . (A.3.15)
0 1 2 q / n + p q /n
Obviously, (2q/n + p, q/n) ¢ (0, 0) for (p, q) ¢ (0, 0).
A.4. Quadratic maps in ]~4
A.4.2. rankQ = 2
rankQ = 2 implies rank L = 2. Change coordinates so that the third and fourth row of Q are zero. Now, the third and fourth row of L are linearly independent and L can be transformed to L --- [0, 0; 0, 0; 1,0; 0, 1] by an affine change of coordinates without altering Q.
• First two rows of Type 2-2- lx yields Type 4-2-1. • First two rows of Type 2-2-2x yields Type 4-2-2. • First two rows of Type 2-2-3x yields Type 4-2-3.
A.4.3. rank Q = 3
We may assume that the first four columns of M are linearly independent. Otherwise, exchange (u, v). Thus, by an affine change of coordinates M can be transformed to
0 1 0 0 A I : = 0 1 0 " (A.4.1)
0 0 1

J. Peters, U. Reif / Computer Aided Geometric Design 15 (1998) 459-473
Applying
I1 l ~ : = 0 1 - q / 2 J '
A :==
yields
Ii 0 0 o 0 1 0 0
M : - - 0 1 0 0 J 0 0 1
with a new value for p. (a) p -- 0 yields Type 4-3-1a. (b) p ¢ 0 yields Type 4-3-1b by scaling
[g0 .~2 2,s 2(/~+,sq) 1 0 0 ,~ I q/2 0 0 1
473
(A.4.2)
(A.4.3)
A.5 . Q u a d r a t i c m a p s in R 5
Since rank ~]I = 5, Type 5-3 can be obtained by an affine change of coordinates.
R e f e r e n c e s
Coffman, A., Schwartz, A.J. and Stanton, C. (1996), The algebra and geometry of Steiner and other quadratically parametrizable surfaces, Computer Aided Geometric Design 13, 257-286.
Degen, W.L.E (1996), The type of triangular B6zier surfaces, in: Mullineux, G., ed., The Mathematics gf Su~bces IV, The Institute gf Mathematics and its Applications Confi'rence Series. Clarendon Press, Oxford, Vol. 38, 153-171.
Sederberg, T.W. and Anderson, D.C. (1985), Steiner surface patches, IEEE Computer Graphics and Applications 5, 23-36.





![arXiv:1801.04257v3 [math.DG] 1 Mar 2019 · 2019. 3. 4. · arXiv:1801.04257v3 [math.DG] 1 Mar 2019 ON PROJECTIVE AND AFFINE EQUIVALENCE OF SUB-RIEMANNIAN METRICS FRED´ ´ERIC JEAN,](https://img.pdfslide.net/doc/110x75/60cebdf9d6e288136150cf7c/arxiv180104257v3-mathdg-1-mar-2019-2019-3-4-arxiv180104257v3-mathdg.jpg)