Embed Size (px)
Citation preview

36 Oilfield Review
The Best of Both Worlds—A Hybrid Rotary Steerable System
The transition from vertical to horizontal drilling has been spurred by evolving
technology that led the industry away from a dependency on conventional bottomhole
assemblies and whipstocks and toward mud motors and rotary steerable systems.
The latest innovation is a hybrid design that combines the performance capabilities of
a rotary steerable system with the high build rates of a positive displacement motor.
Edwin FelczakAriel TorreOklahoma City, Oklahoma, USA
Neil D. GodwinKate MantleSivaraman NaganathanStonehouse, England
Richard HawkinsKe LiSugar Land, Texas, USA
Stephen JonesKaty, Texas
Fred SlaydenHouston, Texas
Oilfield Review Winter 2011/2012: 23, no. 4. Copyright © 2012 Schlumberger.For help in preparation of this article, thanks to Elizabeth Hutton and Emmanuelle Regrain, Houston; and Edward Parkin, Stonehouse, England. DOX, Drilling Office, IDEAS, PERFORM Toolkit, PowerDrive Archer, PowerDrive X5 and PowerPak are marks of Schlumberger.
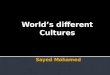
The shortest distance between two points is a straight line. However, it may not be the fastest, or most economical, when it comes to directional drilling. E&P companies increasingly turn to complex well trajectories to hit distant targets,
intersect fractures, penetrate multiple fault blocks or reach deep into a reservoir. Although more difficult to drill than other profiles, these well paths often improve drainage efficiency by increasing wellbore exposure to the pay zone.
Kickoff point
TD
PowerDrive Archer rotary steerable systemPositive displacement motorConventional rotary steerable system
Landing point
Landing point TD
Kickoff point
PPPPPPCPC
44581araD7R1.indd 1 2/17/12 9:40 PM

Winter 2011/2012 3737
Complex horizontal and extended-reach tra-jectories are just the current apex in the evolu-tion of directional drilling. The first nonvertical wells were not intentionally drilled that way, but by the late 1920s, drillers began to figure out how to point a wellbore in a particular direction. Since then, directional drilling technology has progressed beyond a reliance on basic bottom-hole assemblies for influencing the course a bit might take, to using surface-controlled rotary steerable systems that precisely guide the bit to its ultimate destination. During the past decade, the development of new drilling technologies has continued to gain momentum.
This article describes advances that led to the development of rotary steerable systems and focuses on one of the latest steps in their evolution: the PowerDrive Archer rotary steerable system. This hybrid system produces the high build rate of a positive displacement motor with the rapid rate of penetration of a rotary steerable system.
A Brief HistoryThe intentional deviation of wellbores came into practice during the late 1920s as operators sought to sidetrack around obstructions, drill relief wells and avoid surface cultural features; directional drilling techniques were even employed to keep vertical holes from turning crooked.
In part, the ability to drill deviated wells arose from the development of rotary drilling and roller cone bits. The design of these bits causes them to drift laterally, or walk, in response to various formation and drilling parameters such as formation dip and hardness, rotary speed, weight on bit and cone design. In some regions, experienced drillers recognized the natural ten-dency of a bit to walk in a somewhat predictable manner. They would frequently try to build a cer-tain amount of lead angle to compensate for anticipated drift between the surface location and bottomhole target (below left).
Drillers also found that modifications to the rotary bottomhole assembly (BHA) could change a drillstring’s angle of inclination. By varying stabilizer placement, drillers could affect the
balance of the BHA, prompting it to increase, maintain or decrease wellbore inclination from vertical, commonly referred to as building, hold-ing or dropping angle, respectively. The rate at which a rotary BHA builds or drops angle is affected by variables such as distance between stabilizers, drill collar diameter and stiffness, for-mation dip, rotary speed, weight on bit, formation hardness and bit type. The ability to balance the BHA against these factors can be crucial for reaching a planned target.
A BHA configured with a near-bit stabilizer beneath several drill collars will tend to build angle when weight is applied to the bit (below). In this configuration, the collars above the stabi-lizer will bend, while the near-bit stabilizer acts as a fulcrum, pushing the bit toward the high side
> Lead angle, plan view. Rotary cone bits tend to walk to the right. Knowing this, drillers sometimes used a lead angle to orient the wellbore to the left of the target azimuth.
Target azimuth
Surface location
S 20° E Lead line
Lead angle
Target
N
> Using a BHA to change inclination. By strategic placement of drill collars and stabilizers in the BHA, directional drillers can increase or decrease flexibility, or bowing, of the BHA. They use this flexibility to their advantage as they seek to build, drop or hold angle. A fulcrum assembly (upper frame, top) uses a full gauge near-bit stabilizer and sometimes a string stabilizer. Bowing of the drill collars above the near-bit stabilizer tilts the bit upward to build angle (lower frame, left). A pendulum assembly (upper frame, middle) has one or more string stabilizers. The first string stabilizer acts as a pivot point that lets the BHA bow beneath it, thus dropping angle (lower frame, right). A packed assembly uses one or two near-bit stabilizers and string stabilizers to stiffen the BHA (upper frame, bottom). By reducing the tendency to bow, the packed assembly is used to hold angle.
Fulcrum assembly Pendulum assembly
Stabilizer
Near-bit stabilizer Buildin
g
angle
Droppin
g
angle
Near-bit stabilizersFirst string stabilizerSecond string stabilizer
Near-bit stabilizerDrill collarFirst string stabilizer
Fulcrum (Angle-Building) Assembly
Packed (Angle-Holding) Assembly
Second string stabilizer
Bit
Pendulum (Angle-Dropping) Assembly
First string stabilizer
44581araD7R1.indd 2 2/17/12 9:40 PM

38 Oilfield Review
of the borehole. Another type of BHA is used to drop angle. This variation uses one or more stabi-lizers; the collars below the lowest stabilizer in the BHA act as a pendulum, which allows gravity to pull the bit toward the low side of the bore-hole. Upon reaching the desired angle, the driller may use a different BHA to hold angle. The packed BHA utilizes multiple stabilizers, spaced along its length, to increase stiffness.
Drillers employ other mechanical means to help divert a well from its vertical path, most notably the whipstock. Simple in principle, this long steel ramp is concave on one side to hold and guide the drilling assembly. Used in either open or cased holes, the whipstock is positioned at the desired depth, oriented to the desired azi-muth, then anchored in place to provide a guide to initiate, or kick off, a new well path (above).
While early techniques allowed some degree of control over wellbore inclination, they provided little azimuthal control. They were also inefficient, requir-ing multiple trips in and out of the hole to install a whipstock or to change BHA configurations.
The early 1960s witnessed a significant change in directional drilling when a BHA with a fixed bend of approximately 0.5° was paired with a downhole motor to power the drill bit.1 Drilling mud supplied hydraulic power to a motor that
turned the bit.2 The motor and bent sub offered much greater directional control than was possi-ble with earlier BHAs, while significantly increas-ing the angle of curvature that a driller was able to build. Early assemblies had fixed tilt angles and required a trip out of the hole to adjust the angle of inclination.
These steerable motors operate on the tilt-angle principle. The bent sub provides the bit offset needed to initiate and maintain changes in course direction. Three geometric contact points—the bit, a near-bit stabilizer on the motor and a stabilizer above the motor—approximate an arc that the well path will follow.3
Some motors use a downhole turbine; others use a helical rotor and stator combination to form a positive displacement motor (PDM). The basic PDM with bent sub has evolved, leading to the development of a steerable motor. Modern steerable motor assemblies still use PDMs, but include surface-adjustable bent housings (below right). A typical steerable motor has a power-generating section, through which drilling fluid is pumped to turn a rotor that turns a drive shaft and bit. The surface-adjustable bend can be set between 0° and 4° to point the bit at an angle that differs only slightly from the axis of the well-bore; this seemingly minor deflection is critical to the rate at which the driller can build angle. The amount of wellbore curvature imparted by the bent section depends, in part, on its angle, the OD and length of the motor, stabilizer place-ment and the size of drill collars relative to the diameter of the hole.
Steerable motors drill in either of two modes: rotary mode and oriented, or sliding, mode. In rotary mode, the drilling rig’s rotary table or its topdrive rotates the entire drillstring to transmit power to the bit. During sliding mode, the drill-string does not rotate; instead, mud flow is diverted to the downhole motor to power the bit. Only the bit rotates in sliding mode—the nonro-tating portion of the drillstring simply follows along behind the steering assembly.
Different motors may be selected on the basis of their ability to build, hold or drop angle during rotary mode drilling. Conventional practice is to drill in rotary mode at a low number of revolu-tions per minute (RPM), rotating the drillstring from the surface and causing the bend to point equally in all directions, thereby drilling a straight path. Inclination and azimuth measure-ments can be obtained in real time by measure-ment-while-drilling (MWD) tools to alert the driller to any deviations from the intended course. To correct for those deviations, the driller must switch from rotary to sliding mode to change wellbore trajectory.
The sliding mode is initiated by halting rota-tion of the drillstring so the directional driller can orient the bend in the downhole motor to point in the direction, or toolface angle, of the desired tra-jectory. This is no small task, given the torsional forces that can cause the drillstring to behave like a coiled spring.4 After accounting for bit torque, drillstring windup and contact friction, the driller must rotate the drillstring in small increments from the surface while using MWD measurements as a reference for toolface direction. Because a drillstring can absorb torque over long intervals, this process may require several rotations at the surface to turn the tool just once downhole. When the proper toolface orientation is confirmed, the driller activates the downhole motor to com-mence drilling in the prescribed direction. This process may need to be repeated several times during the course of drilling because reactive torque that is generated as the bit cuts into the rock may force reorientation of the toolface.
> Cased hole whipstock. This cylindrical steel ramp (green) is run in the hole to a predetermined kickoff depth and oriented azimuthally. A window mill opens a hole in the casing, which is dressed by the watermelon mill. This assembly is then pulled and replaced by a drilling BHA.
Casing
Cement
New borehole
Watermelonmill
Window mill
Cement plug
Whipstock
> Positive displacement motor. Downhole motors, such as this PowerPak steerable motor, provide much more directional control than conventional BHAs.
Power section
Surface-adjustablebent housing
Stabilizer
Bit
44581araD7R1.indd 3 2/17/12 9:40 PM

Winter 2011/2012 39
Each mode brings distinct challenges. In rotating mode, the bend in the drilling assembly causes the bit to rotate off-center from the BHA axis, resulting in a slightly enlarged and spiral-shaped borehole. This gives the wellbore rough sides that increase torque and drag and may cause problems while running in the hole with completion equipment—especially through long lateral sections. Spiral boreholes may also affect logging tool response.
In sliding mode, the lack of rotation intro-duces other difficulties. Where the drillstring lies on the low side of the borehole, drilling fluid flows unevenly around the pipe and impairs the mud’s capacity to remove cuttings. This, in turn, may result in the formation of a cuttings bed, or a buildup of cuttings on the low side of the hole, which increases the risk of stuck pipe. Sliding also decreases the horsepower available to turn the bit, which, combined with sliding friction, decreases the rate of penetration (ROP) and increases the likelihood of differential sticking.
In extended-reach trajectories, frictional forces may build until there is insufficient axial weight to overcome the drag imposed by drill-pipe against the wellbore. This makes further drilling impossible and leaves some targets out of reach. Additionally, switching between sliding and rotating modes can create undulations or doglegs that increase wellbore tortuosity, thus increasing friction while drilling and running casing or completion equipment.5 These undula-tions may also create low spots, or sumps, where fluid and debris collect, impeding flow after the well is completed.
A number of these problems were addressed in the late 1990s with the development of a rotary steerable system (RSS). The single most impor-tant aspect of the RSS is that it allows for continuous rotation of the drillstring, thereby
eliminating the need to slide while drilling direc-tionally. RSS tools provide a nearly instantaneous response to commands from the surface when the driller needs to change downhole trajectory. Early on, these systems were utilized primarily to drill extended-reach trajectories, in which the ability to slide steerable motors had been limited by hole drag. These jobs often resulted in improved ROPs and hole quality over previous systems (above). Today, the RSS is widely used for its performance drilling, hole cleaning and accu-rate geosteering capabilities.
Revolutionary SteerablesRotary steerable systems have evolved consider-ably since their introduction. Early versions uti-lized mud-actuated pads or stabilizers to cause changes in direction—a design concept that con-tinues to enjoy success to this day. With a depen-dence on contact with the borehole wall for
directional control, the performance of these tools can sometimes be affected by borehole washouts and rugosity. Later versions included designs that relied once again on a bend to pro-duce changes in toolface angle, thereby reducing borehole environmental influences on tool per-formance.6 Thus, two steering concepts were born: push-the-bit and point-the-bit.
The push-the-bit system pushes against the borehole wall to steer the drillstring in the desired direction. One version of this RSS uses a bias unit with three actuator pads placed near the bit to apply lateral force against the forma-tion (below). To build angle, each mud-actuated pad pushes against the low side of the hole as it
1. McMillin K: “Rotary Steerable Systems Creating Niche in Extended Reach Drilling,” Offshore 59, no. 2 (February 1999): 52, 124.
2. Unlike conventional rotary drilling techniques, in which rotation of the entire drillstring is required to drive the bit, the drillstring does not rotate when a mud motor is employed. Instead, the mud motor relies on hydraulic power supplied through the circulation of drilling mud to turn a shaft that drives the bit.
3. Allen F, Tooms P, Conran G, Lesso B and Van de Slijke P: “Extended-Reach Drilling: Breaking the 10-km Barrier,” Oilfield Review 9, no. 4 (Winter 1997): 32–47.
4. Downton G, Hendricks A, Klausen TS and Pafitis D: “New Directions in Rotary Steerable Drilling,” Oilfield Review 12, no. 1 (Spring 2000): 18–29.
5. A dogleg is an abrupt turn, bend or change of direction in a wellbore.
6. Schaaf S, Pafitis D and Guichemerre E: “Application of a Point the Bit Rotary Steerable System in Directional Drilling Prototype Wellbore Profiles,” paper SPE 62519, presented at the SPE/AAPG Western Regional Meeting, Long Beach, California, USA, June 19–23, 2000.
> Comparison of borehole quality. Caliper displays show how a positive displacement motor created a spiralled borehole (top), while the rotary steerable system drilled a much smoother bore (bottom).
> Push-the-bit RSS. Pads extend dynamically from a rotating housing to create a side force directed against the formation, which in turn, causes a change in the drilling direction.
Stabilizer
Control unit Bias unit
Bit
Extended pad
When pads push againstthe high side, the bit
cuts toward the low side.
Extended pad
44581araD7R1.indd 4 2/17/12 9:40 PM

40 Oilfield Review
rotates into position; to drop angle, each pad pushes against the high side. Driller commands sent downhole by mud pulse telemetry direct the timing and magnitude of pad actuation. A control unit positioned above the bias unit drives a
rotary valve that opens and closes the mud sup-ply to the pads in concert with the drillstring rotation. The system synchronously modulates the extension and contact pressure of the actua-tor pads as each pad passes a certain orientation point. By applying hydraulic pressure each time a pad passes a specific point, the pad forces the drillstring away from that direction, thus moving it in the desired direction.
A point-the-bit system uses an internal bend to offset the alignment between tool axis and borehole axis to produce a directional response.7 In a point-the-bit system, the bend is contained within the collar of the tool, immediately above the bit (left). Point-the-bit systems change well trajectory by changing the toolface angle. The trajectory changes in the direction of the bend. This bend orientation is controlled by a servomo-tor that rotates at the same rate as the drillstring, but counter to the drillstring rotation. This allows the toolface orientation to remain geostationary, or nonrotating, while the collar rotates.8
The latest development in the evolution of these rotary steerables—the PowerDrive Archer high-build-rate RSS—is a hybrid that combines performance features of both push-the-bit and point-the-bit systems (below).
The Hybrid RSSUntil recently, RSS assemblies were unable to deliver well profiles as complex as those drilled by steerable motor systems. However, the PowerDrive Archer rotary steerable system dem-onstrated its capability to attain high dogleg severities (DLSs) while achieving ROPs typical of rotary steerable systems.9 Just as important, it is a fully rotating system—all external tool compo-nents rotate with the drillstring, enabling better hole cleaning while reducing the risk of sticking.
Unlike some rotary steerables, the PowerDrive Archer RSS does not rely on external moving pads to push against the formation. Instead, four actuator pistons within the drill collar push against the inside of an articulated cylindrical steering sleeve, which pivots on a universal joint to point the bit in the desired direction. In addi-tion, four stabilizer blades on the outer sleeve above the universal joint provide side force to the drill bit when they contact the borehole wall, enabling this RSS to perform like a push-the-bit system. Because its moving components are internal—thus protected from interaction with harsh drilling environments—this RSS has a lower risk of tool malfunction or damage. This design also helps extend RSS run life.
An internal valve, held geostationary with respect to toolface, diverts a small percentage of mud to the pistons. The mud actuates the pistons that push against the steering sleeve. In neutral mode, the mud valve rotates continuously, so bit force is uniformly distributed along the borehole wall, enabling the RSS to hold its course.10
Near-bit measurements, such as gamma ray, inclination and azimuth, allow the operator to closely monitor drilling progress. Current orien-tation and other operating parameters are relayed to the operator through a control unit, which sends this information uphole via continu-ous mud pulse telemetry. From the surface, the directional driller sends commands downhole to the control unit located above the steering unit. These commands are translated into fluctuations in mud flow rates. Each command has a unique pattern of fluctuations that relate to discrete points on a preset steering map, which has been programmed into the tool prior to drilling.
Operators have been quick to capitalize on the capabilities of the PowerDrive Archer steer-
> Point-the-bit RSS. A bit shaft is oriented at an offset angle to the axis of the tool. This offset is held geostationary by a counter-rotating servomotor.
Power-generatingturbine
Motor
Sensor packageand control system
Bit
Mud flow
Bit shaft
> PowerDrive Archer rotary steerable system. This hybrid system combines actuator pads with an offset steering shaft—all located inside the drill collar for protection from the downhole environment.
Steering unit
Bias unit
Control unit
Internal geostationaryrotary valveStabilizer
blades
Internal universal joint Internal actuator pistonsStabilizer blades
44581araD7R1.indd 5 2/17/12 9:40 PM

Winter 2011/2012 41
ing system. Because it can drill the vertical, curved and horizontal sections, it can attain com-plex 3D trajectories and drill from one casing shoe to the next in just one run.
Putting It to the Test Until recently, steerable PDMs tended to domi-nate the realm of high-dogleg drilling projects. Despite their directional capabilities, drilling with PDMs may consume a lot of rig time. With this approach, a conventional rotary BHA is typi-cally used to drill the vertical section of the well. Upon reaching the kickoff point (KOP), the driller trips out of the hole to change the BHA. A PDM is then installed, with a bent housing set to the angle needed to drill the curve. After landing the bit in the target formation, the driller again trips out to dial down the angle of the adjustable bent housing to a less aggressive build rate, then trips back into the hole to drill the lateral sec-tion. This process results in a good deal of flat time, in which the bit is not on bottom and not actively drilling.
Using the PowerDrive Archer RSS, an opera-tor can drill the vertical, curved and lateral sec-tions with a single BHA, thereby increasing drilling efficiency, ROP and borehole quality. And by circumventing the practice of alternating between sliding and rotating modes, drilling with the RSS achieves lower borehole tortuosity, drag and friction caused by poor hole quality. This permits drilling of longer lateral sections that reach farther into the reservoir.
The PowerDrive Archer RSS has been used in a wide range of environments, onshore and off, from the US to the Middle East and Australia. The high-build-rate capabilities first demonstrated in shale plays are now used to help drillers maintain trajectories through problematic unconsolidated formations. Throughout a variety of plays, opera-tors are beginning to appreciate the flexibility in designing and revising well trajectories that this hybrid RSS affords.
One such play, the Marcellus Shale in the Appalachian basin of North America, spans an area estimated to be approximately 3.5 times larger than that of the Barnett Shale, which has proved to be one of the most prolific sources of unconventional gas in the US. The Devonian-age Marcellus Shale contains an estimated 363 Tcf [10.3 trillion m3] of recoverable gas. Ultra Petroleum Corporation is engaged in exploration and development of this play.11
In the past, operators completed Marcellus wells using vertical boreholes, which provided comparatively little exposure of the source rock to the wellbore. However, horizontal drilling
technology has significantly changed the eco-nomics of gas production in the Marcellus play, with horizontal wells drilled from multiwell pads and completed with multistage fracture stimula-tion of the lateral section. Operators frequently used air to drill the vertical section, then switched to mud drilling upon reaching the KOP. After setting 95/8-in. casing, they kicked off an 83/4-in. hole, building angle with a PDM before landing the well within the Marcellus interval. To drill the curved and lateral sections, a PDM might drill for 90% or more of the interval in slid-ing mode. This approach has several drawbacks, including lower ROP, poor hole cleaning and tor-tuous well paths—and often required trips out of the hole to adjust the bent housing when geologic uncertainties forced well path corrections.
Drilling in this play can involve complex 3D well profiles, high curvature rates and direction-ally challenging formation dips that affect DLS. Ultra Petroleum recognized the potential for such problems in a recent project and selected the PowerDrive Archer RSS to meet these chal-lenges, drill the wells quickly and place them in the productive zones of the formation. In 2010, Ultra began an aggressive drilling campaign,
having identified numerous targets within this play. The company drilled the first Marcellus well using a steerable PDM to establish a bench-mark. The next 10 wells were drilled using the PowerDrive Archer RSS. Some of these wells were kicked off from vertical with a long turn in azimuth of 90° or more to line up with the target while simultaneously building angle at rates up to 8°/100 ft [8°/30 m]. Geologic uncertainties near the landing point sometimes called for cor-rective action, often requiring higher build rates (above).
7. Bryan S, Cox J, Blackwell D, Slayden F and Naganathan S: “High Dogleg Rotary Steerable System: A Step Change in Drilling Process,” paper SPE 124498, presented at the SPE Annual Technical Conference and Exhibition, New Orleans, October 4–7, 2009.
8. Al-Yami HE, Kubaisi AA, Nawaz K, Awan A, Verma J and Ganda S: “Powered Rotary Steerable Systems Offer a Step Change in Drilling Performance,” paper SPE 115491, presented at the SPE Asia Pacific Oil and Gas Conference and Exhibition, Perth, Western Australia, Australia, October 20–22, 2008.
9. A dogleg is typically quantified in terms of dogleg severity, which is measured in degrees per unit of distance.
10. Bryan et al, reference 7.11. Auflick R, Slayden F and Naganathan S: “New
Technology Delivers Results in Unconventional Shale Play,” presented at the Mediterranean Offshore Conference and Exhibition, Alexandria, Egypt, May 18–20, 2010.
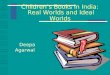
> Three-dimensional trajectory. In this Marcellus Shale well, the operator used the PowerDrive Archer RSS to kick off from vertical, drill a 3D curve with more than 100° change in azimuth, then hold the tangent section. Uncertainty in the geologic model forced the operator to change the landing point by more than 70 ft [21 m]. Once the geologic marker was identified, the RSS quickly built angle to 16°/100 ft [16°/30 m] to reach the target, then the operator switched to a 2° build rate to a create a soft landing within the reservoir section.
Reservoir section
Kickoff point
TD
Landingpoint
Tangent section
Change in azimuth
44581araD7R1.indd 6 2/25/12 3:33 PM

42 Oilfield Review
With one exception, the wells drilled subse-quent to the benchmark PDM well realized sig-nificant savings in rig time. In addition, all completion strings were run without incident. The hybrid RSS was also able to reach farther
into the target section, resulting in more than a twofold increase in production rates.
A different resource play has been receiving attention in central Oklahoma, USA, where Cimarex Energy Company has been drilling the
Woodford Shale. Cimarex selected PathFinder, a Schlumberger company, to utilize the PowerDrive Archer RSS in drilling the curve section of the company’s Kappus 1-22H well. Using this RSS to drill the 83/4-in. hole with an 8°/100 ft build rate, the operator achieved an 80% increase in ROP over that of previous wells drilled with PDMs. Having attained a smooth wellbore through the curve, the operator was able to switch to a PowerDrive X5 RSS, which drilled a 4,545-ft [1,385-m] lateral section to TD in just one run. A fast ROP through the curve, combined with high build rate and smooth drilling operations in the lateral section resulted in a savings of 10 drilling days (left).
The high-build-rate capability of this hybrid RSS makes for a shorter curved section, enabling operators to design trajectories with deeper KOPs. A deep KOP lets the operator expand the length of the vertical section, which typically drills faster than the curved section. An operator in the Middle East used the PowerDrive Archer RSS to drill an 81/2-in. curve section for 846 ft [258 m] at a build rate of 7.6°/100 ft [7.6°/30 m]. After meeting the objectives for this well, the operator selected the same system to drill a sec-ond well.
The second well required a more aggressive build rate, but in carrying out this plan, the oper-ator was able to boost overall ROP by drilling through a longer vertical section before kicking off, which enabled a rapid ROP through the verti-cal section. After drilling the 121/4-in. section, the operator set casing and kicked off the 81/2-in. sec-tion. The hybrid RSS consistently maintained an 11°/100-ft [11°/30-m] DLS and drilled the 742-ft [226-m] interval in a single run of 15 hours (left). The well was landed within 1 ft [0.3 m] vertically and 3.8 ft [1.2 m] laterally of its intended target. Because the 81/2-in. section was shortened, the operator also saved nearly 700 ft [210 m] of liner. Pushing the kickoff point deeper sharpened the curve, which reduced the amount of drilled foot-age needed to reach the reservoir and allowed drilling engineers to consider downsizing the cas-ing strings to achieve further savings.12
In northwest Arkansas, USA, SEECO, a wholly owned subsidiary of Southwestern Energy Company, tested the performance of the PowerDrive Archer system as it drilled the verti-cal, curved and lateral sections of an Atoka Formation well. The vertical section was drilled,
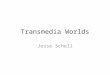
> Time versus depth curve. To drill the Kappus 1-22H well in the Woodford Shale, Cimarex used the PowerDrive Archer system. The operator was able to drill to TD in 49 days instead of 59, saving 10 days of drilling time against the projected time frame.
5,000
0
15,000
20,000
10,000
604020
Time, days
0
Dept
h, ft
Plan
As drilled
> Shortened curve. The PowerDrive Archer RSS achieved an 11°/100 ft build rate that allowed the operator to extend the vertical section of the trajectory while shortening the curve to reduce drilling time and the amount of liner required.
Conventional kickoff point
Conventional trajectory
PowerDrive Archer
kickoff point
PowerDrive Archer
trajectory
12. Eltayeb M, Heydari MR, Nasrumminallah M, Bugni M, Edwards JE, Frigui M, Nadjeh I and Al Habsy H: “Drilling Optimization Using New Directional Drilling Technology,” paper SPE/IADC 148462, presented at the SPE/IADC Middle East Drilling Technology Conference and Exhibition, Muscat, Oman, October 24–26, 2011.
44581araD7R1.indd 7 2/17/12 9:40 PM

Winter 2011/2012 43
then the well was kicked off along the planned azimuth. The driller built angle at 10°/100 ft [10°/30 m] DLS before making a soft landing at the desired target point with an 88.2° inclina-tion. Using an automated inclination hold fea-ture, the RSS drilled ahead, with inclination maintained within 0.5° of the planned trajec-tory. After drilling for about 1,000 ft [305 m], the directional driller nudged the well path upward to follow the general dip of the reservoir, with the RSS building inclination up to 92° before an unexpected fault created an abrupt lateral ter-mination of the reservoir (right).
Planning for Success The success of PowerDrive Archer steering tech-nology can be attributed largely to extensive planning, modeling and testing. BHA design and modeling of bit and BHA response go into each PowerDrive Archer job.
As a first step, Schlumberger drilling engi-neers obtain offset well information from the operator and focus on drilling issues and bit per-formance data. Engineers use DOX Drilling Office integrated software to design a trajectory to land within the designated target zone while optimiz-ing drilling efficiency. This software package integrates trajectory design with drillstring spec-ifications and BHA design, hydraulics, torque and drag. The DOX software lets drilling engineers quickly run multiple scenarios to optimize the well path. A well plan and equipment plan are then formulated to reach the given target, taking into account known drilling issues. Anticollision modeling ensures that the proposed trajectory will avoid nearby wells.
Hole quality is a critical issue in high DLS or extended-reach wells; poor hole quality may impact the success of a well by hampering efforts to deploy drilling and completion equip-ment through tight curves and may limit the footage that can be drilled through the lateral section. Extensive testing has played an impor-tant role in developing capabilities to deliver high-quality boreholes. One such test involved a series of blocks, each with a different compres-sive strength. These test blocks were arranged side by side to form a rectangle nearly 45 m [150 ft] long. The PowerDrive Archer RSS drilled through the blocks using various combi-nations of bits and power settings to simulate downhole drilling conditions. Once the holes were drilled, a laser caliper measured the bore-hole gauge in each block and consistently found no borehole rugosity (right).
> Two-dimensional curve and lateral section. SEECO developed two drilling scenarios to accommodate uncertainties in Atoka Formation dip. The actual well path (red) differs from the two planned trajectories. Geosteering LWD sensors proved the dip to lie between those assumed in the two plans. Faulting terminated the reservoir and shortened the lateral section considerably. (Adapted from Bryan et al, reference 7.)
2,500
2,000
3,000
0 500 1,000 1,500
Lateral section, ft
Original planAs drilled
Pilot hole
Revised plan
2,000 2,500 3,000
True
ver
tical
dep
th, f
t
> Smooth drilling through test blocks. Laser calipers revealed no borehole rugosity in the borehole drilled by the PowerDrive Archer RSS (bottom). (Photographs courtesy of Edward Parkin, Stonehouse, England.)
44581araD7R1.indd 8 2/17/12 9:40 PM

44 Oilfield Review
Although modeling of BHA and bit response has been notoriously difficult, recent advances make it possible to analyze dynamic downhole drilling conditions and compute drillstring stresses. The forces generated by the bit and their effects on BHA steering performance can also be predicted. This is followed by laboratory testing and, finally, field testing to deliver opti-mized BHA and bit designs.
Schlumberger performed finite element anal-ysis and bending moment modeling and analysis on components of the PowerDrive Archer BHA (left). Field testing validated BHA behavior to ensure steerability at high build rates. After the BHA design was finalized, engineers conducted shock and vibration analysis to identify critical resonance frequencies and RPMs to be avoided while drilling. Torque and drag simulations for drilling and tripping operations were run to ensure BHA integrity. Hydraulics modeling was also conducted across various mud weight and flow ranges.
Drillbit technology is another factor that is vital to the success of any well. The bit affects drilling efficiency, or the ability to achieve and maintain a high average ROP. Bit design also impacts steerability, or the ability to place the well in the right part of the reservoir. Push-the-bit systems generally require an aggressive side-cutting bit for delivering doglegs, while point-the-bit systems tend to rely on stabiliza-tion from a less aggressive bit with a longer side gauge. With a hybrid system, using the right bit is especially critical. For this RSS, engineers con-ducted extensive testing to characterize interac-tions between the bit, tools and formation to best match the bit profile to the tools and maxi-mize performance.
Bits for the PowerDrive Archer system can be tailored to enhance steerability and deliver improved ROP for a particular field. The IDEAS integrated drillbit design platform lets drilling engineers optimize bit selection based on model-ing the drilling system overall.13 The IDEAS soft-ware accounts for a wide range of variables in its bit design and BHA optimization packages: •rocktypeandformationcharacteristics•interaction between bit cutter surface and
rock face•contactbetweendrillstringandwellbore•detailedbottomholeassemblydesign•casingprogram•welltrajectory•drillingparameters.
Modeling data were also used as input to a fatigue management system that predicts fatigue life for each component of the BHA. When sub-jected to rotation through high doglegs, BHAswill experience large bending moments. Fatigue life decreases exponentially with increasing build rate and can reduce the life of standard BHA components to a matter of hours. Fatigue modeling and tracking is helping drillers avoid twist offs and other catastrophic failures.
Schlumberger tracks fatigue life automati-cally to ensure integrity of BHA components. With the aid of PERFORM Toolkit data optimiza-tion and analysis software, the wellsite engineer can record RPM, ROP, DLS and other contribu-tors to fatigue, providing real-time fatigue man-agement information and predictions of fatigue life. Monitoring fatigue life is not a trivial task: The position of each component along the well path must be tracked and the bending moment caused by DLS—along with RPM and time—needs to be quantified. Tracking fatigue in real time, including time off-bottom rotating, can sig-nificantly improve the accuracy of the fatigue life estimates. These fatigue data may be monitored remotely at operations support centers, where the data can be reviewed by drilling experts who can advise operators when critical components need to be replaced.
Advances in directional drilling technology are helping operators access hydrocarbons that could not otherwise be produced. The latest gen-eration of rotary steerables is achieving well tra-jectories and step-outs that were previouslyunimaginable, while delivering lower cost and lower risk wells and improving production. These increasingly complex well trajectories are spur-ring the industry to reach further in the search for new reserves. —MV
> Tool joint stress contours. Drillstring tool joint connections are subjected to a variety of loads that affect the fatigue life of a tool. In particular, tool joints are subjected to torque as they are made up on the drill floor, when the pin is screwed into the box (inset). This is followed later by bending moments as the curve section is drilled. Finite element analysis can be used to predict stress along a threaded connection by accounting for the torque and bending moments expected on each job. This plot indicates higher von Mises stress in the pin than in the box when the threaded connection is made up and subjected to a bending moment. This information is useful in predicting the fatigue life of the connection.
1.184 × 105
1.036 × 105
8.880 × 104
7.400 × 104
5.920 × 104
4.440 × 104
2.960 × 104
1.480 × 104
1.257 × 104
von Mises stress,psi
Pin Box
Pin
Box
13. The IDEAS program was developed in the 1990s by Smith Bits, which was later acquired by Schlumberger. For more on bit design using the IDEAS system: Centala P, Challa V, Durairajan B, Meehan R, Paez L, Partin U, Segal S, Wu S, Garrett I, Teggart B and Tetley N: “Bit Design—Top to Bottom,” Oilfield Review 23, no. 2 (Summer 2011): 4–17.
44581araD7R1.indd 9 2/17/12 9:40 PM