Embed Size (px)
DESCRIPTION
The Boundary Layer at the Bottom of a Solitary Wave and Implications for Sediment Transport
Citation preview

Progress in Oceanography 120 (2014) 399–409
Contents lists available at ScienceDirect
Progress in Oceanography
journal homepage: www.elsevier .com/ locate /pocean
Review
The boundary layer at the bottom of a solitary wave and implications forsediment transport
0079-6611/$ - see front matter � 2013 Elsevier Ltd. All rights reserved.http://dx.doi.org/10.1016/j.pocean.2013.09.001
⇑ Corresponding author. Tel.: +39 0103532475; fax: +39 0103532546.E-mail addresses: [email protected] (G. Vittori), [email protected] (P. Blon-
deaux).
Giovanna Vittori, Paolo Blondeaux ⇑Department of Civil, Chemical and Environmental Engineering, University of Genoa, Via Montallegro 1, 16145 Genova, Italy
a r t i c l e i n f o
Article history:Received 8 November 2012Received in revised form 28 August 2013Accepted 3 September 2013Available online 19 September 2013
a b s t r a c t
The present paper summarizes the theoretical and numerical results of recent studies of the bottomboundary layer generated by the propagation of a solitary wave which is often used as a model of a tsu-nami wave. The flow and the bottom shear stress are discussed as function of the parameters of the prob-lem, i.e. (i) the ratio between the height H⁄ of the wave and the local water depth h⁄, (ii) the ratio betweenthe thickness d⁄ of the bottom boundary layer and h⁄, (iii) the relative bottom roughness. In particular, theconditions leading to turbulence appearance, which are obtained by means of a linear stability analysis,are presented along with those obtained by means of direct numerical simulations of Navier–Stokesequations and the integration of the RANS equations. It is shown that turbulence tends to appear duringthe decelerating phase of the wave cycle, if the wave height is larger than a critical value which dependson the ratio between the thickness of the bottom boundary layer and h⁄ and the relative bottom rough-ness. As the height of the wave increases, turbulence appears earlier and becomes more intense, thusenhancing mixing phenomena and the sediment transport rate.
� 2013 Elsevier Ltd. All rights reserved.
Contents
1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3992. Formulation of the problem and solution methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 401
2.1. Formulation of the problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4012.2. The laminar solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4022.3. The linear stability analysis of the laminar flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4022.4. The direct numerical simulations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4022.5. The Reynolds averaged model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403
3. The results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403
3.1. The linear stability analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4033.2. The direct numerical simulations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4043.3. The Reynolds averaged model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4063.4. The sediment transport. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4074. Conclusions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 408Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 409References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 409
1. Introduction
Even though field measurements show that it is difficult to ob-serve a truly solitary wave (Shore Protection Manual, 1984), thesolitary wave model provides an acceptable description of the
dynamics of sea waves when they approach the coastline andmove into the shallow water region (Munk, 1949). Moreover, land-slides and earthquakes can generate long waves which behavesimilarly to solitary waves. Hence, a large number of studies havebeen devoted to study solitary waves.
In nature, the Reynolds number of the flow field generated bythe propagation of a solitary wave turns out to be quite large andit is acceptable to split the fluid domain into a core region, wherethe fluid behaves like an inviscid fluid, and boundary layers where

400 G. Vittori, P. Blondeaux / Progress in Oceanography 120 (2014) 399–409
viscous effects should be taken into due account. The flow in theinviscid region can be determined using different approaches andthe paper of Miles (1980) provides a review of the available results.Even though the thickness of the bottom boundary layer is rela-tively thin, the description of the flow close to the bottom is quiteimportant for benthic processes.
In particular, the propagation of a solitary wave can mobilize alarge amount of sediment, thus causing significant erosion anddeposition processes. To quantify the sediment transport inducedby the propagation of a solitary wave, it is necessary to have a de-tailed knowledge of the flow induced close to the bottom and todetermine the bottom shear stress. Therefore, in the recent years,many investigations have been developed to the study of theboundary layer at the bottom of a solitary wave considering boththe laminar regime and the turbulent regime. Of course, the turbu-lent regime is the most relevant, to analyze both sea waves in thenear-shore region and tsunami waves.
The boundary layer generated at the bottom of a solitary wave wasconsidered by Liu and Orfila (2004) and Liu et al. (2007) by assumingthe flow regime to be laminar. The solution obtained by Liu and Orfila(2004) and Liu et al. (2007) shows that the horizontal velocity compo-nent in the inviscid region always points in the direction of wavepropagation but the fluid velocity inside the bottom boundary layerand the bed shear stress reverse their direction after the passage ofthe wave crest, when the external velocity decelerates.
As already pointed out, the theoretical analyzes of Liu and Orfila(2004) and Liu et al. (2007), as well as those of previous investiga-tors (Keulegan, 1948; Mei, 1989), assume that the Reynolds numberis not so large to trigger turbulence appearance. However, underfield conditions, it is likely that the flow regime becomes turbulent.To determine the flow field in the boundary layer at the bottom of asolitary wave, Vittori and Blondeaux (2008) used direct numericalsimulations of continuity and Navier–Stokes equations, which allowturbulence appearance and dynamics to be investigated.
Vittori and Blondeaux (2008) observed that turbulent oscilla-tions start to appear after the passage of the wave crest, if the waveheight is larger than a critical value which depends on the waterdepth. After the passage of the wave crest, the flow outside the bot-tom boundary layer decelerates and the adverse pressure inducesan inflectional point in the velocity profile which, for large waveheights, triggers the instability of the basic laminar flow.
These numerical findings have been recently confirmed by theexperimental investigations of Sumer et al. (2010) and Tanakaet al. (2011). Sumer et al. (2010) simulated the flow in the bottomboundary layer of a solitary wave using an oscillating water tunnel(U-tube) while Tanaka et al. (2011) employed a new experimentalapparatus which consists of an overflow head tank, a conduit watertunnel and a downstream gate mechanically controlled.
The experimental measurements show that the flow regimekeeps laminar during the whole wave cycle, if the amplitude ofthe velocity oscillation induced in the experimental apparatus isrelatively small. If the amplitude is increased, a critical value isfound above which the laminar flow turns out to be unstable. Justabove the critical conditions, the laboratory experiments of Sumeret al. (2010) show that the instability of the basic laminar flow,which takes place during the decelerating phase, leads to theappearance of a regular array of two-dimensional vortices (vortextubes) which, later, decay because of viscous effects. If the ampli-tude of the velocity oscillation is further increased, these two-dimensional vortices break-up and give rise to three-dimensionalvortices and a fully turbulent flow. The mechanisms, which giverise to the coherent vortex tubes and later to turbulence, appearto be similar to that operating in oscillatory boundary layers(Costamagna et al., 2003; Carstensen et al., 2010).
For practical applications, it is unfeasible to make direct numer-ical simulations of the flow in the bottom boundary layer. Hence to
evaluate the flow resistance and the sediment transport induced bya solitary wave, the effects of the bottom boundary layer on thenearshore circulation and the coastal morphology, are taken intoaccount by using empirically-based formulae or simple turbulenceclosures. However, even though simple turbulence models can pro-vide a description of the gross features of the boundary layer, theyfail to provide an accurate description of turbulence dynamics.
The turbulent boundary layer at the bottom of a solitary wavewas studied by Liu (2006) by considering the Reynolds averagedequations. To close the problem, Liu (2006) used the Boussinesqassumption and assumed the eddy viscosity to be a power functionof the distance from the bottom. The analytical solution of Liu(2006) allows interesting results to be obtained and in particularthe wave damping rate to be quantified.
However, as pointed out by Blondeaux and Vittori (2012), the alge-braic turbulence model employed by Liu (2006) does not allow anaccurate description of turbulence structure. Suntoyo and Tanaka(2009) obtained a better description of turbulence dynamics by usingthe two-equation turbulence model of Menter (1994). This turbu-lence model gives rise to values of the turbulent kinetic energy andof the bottom shear stress during the decelerating phase which arelarger than those of the accelerating phase, as observed in the exper-iments. However, the experimental measurements made by Sumeret al. (2010) show a well defined second peak of the wall shear stresswhich is not reproduced by the model used by Suntoyo and Tanaka(2009). Moreover, the Reynolds number predicted by Suntoyo and Ta-naka (2009) for turbulence appearance is smaller than the value sug-gested by the laboratory experiments of Sumer et al. (2010).
In the framework of the research project n. 2008YNPNT9-003’Idrodinamica e morfodinamica nella regione dei frangenti’, sup-ported by the ’Ministero dell’Istruzione, dell’Universitá e della Ric-erca’, the boundary layer generated by the propagation of a solitarywave was studied.
(i) By investigating the stability of the laminar flow, using a lin-ear stability analysis and a momentary criterion of instabil-ity (Shen, 1961),
(ii) By performing direct numerical simulations of continuityand Navier–Stokes equations,
(iii) By using the two-equation turbulence model by Saffman(1970) and Saffman and Wilcox (1974).
The results of these studies are described in detail in Blondeauxet al., 2012, Vittori and Blondeaux (2008, 2011), Blondeaux andVittori (2012) and are reviewed hereinafter along with the recentexperimental findings of Sumer et al. (2010) to provide an inte-grated and exhaustive description of the phenomenon.
Similarities exist between the boundary layer at the bottom of asurface solitary wave and that generated by long internal waves.
Internal waves have been extensively investigated and a reviewof the available results can be found in Garret and Munk (1979),Ostrovsky and Stepanyants (1989), Grimshaw et al. (1998), Staquetand Sommeria (2002), Helfrich and Melville (2006).
The inviscid dynamics of propagating long internal waves isusually determined introducing the weakly nonlinear Korteweg-de Vries equation. If a two-layer system is considered and the rigidlid approximation is introduced, the solution of the Korteweg-deVries equation shows the existence of both elevation and depres-sion internal solitary waves. The former take place when thicknessof the upper layer is larger than the thickness of the lower layerand viceversa.
However, the obtained results are not quantitatively accurate,since internal waves are often characterized by large amplitudesand strong nonlinear effects. A useful extension of the Korteweg-de Vries model is that which includes cubic nonlinearity (Djordjevicand Redekopp, 1988). The results obtained by means of the ex-

G. Vittori, P. Blondeaux / Progress in Oceanography 120 (2014) 399–409 401
tended Korteweg-de Vries equation show that the wave crestbroadens and tends to becomes flat as the amplitude increases.Then, the Korteweg-de Vries model can be further extended by con-sidering finite amplitude waves in shallow waters or by numeri-cally integrating Euler equations.
Then, the dynamics of inviscid internal waves controls the flowdynamics in the viscous bottom boundary layer, which is driven bya sequence of adverse and favorable pressure gradients, the timingand duration of which depend on the wave phase and on main char-acteristics of the inviscid wave (e.g. elevation/depression wave).
If the flow regime is laminar, the flow in the bottom boundarylayer can be determined either by using the recent analytical solu-tion of Liu and Orfila (2004) or by numerical means. However, forlarge wave amplitudes, the laminar solution turns out to be unsta-ble and two-dimensional vortex structures or three-dimensionalturbulence are expected to appear.
The instability characteristics of the flow in the boundary layerwere investigated by many authors (e.g. Bogucki and Redekopp,1999; Wang and Redekopp, 2001; Stastna and Lamb, 2002; Diam-essis and Redekopp, 2006) who focused their attention on the spa-tially-nonuniform separation region where an inflectional velocityprofile is present. In fact, as pointed out by Hammond and Rede-kopp (1998), the growth rates generated by the inviscid instability,charateristic of inflectional velocity profiles, are significantly largerthan those originated by the viscous mechanism characteristic ofattached boundary layers.
More recently, Lin and Redekopp (2011) made numerical simu-lations of the boundary layer generated under an internal long sol-itary wave of depression in a two-layer model of actual densitystratifications by considering the turbulent regime and using aRANS approach and a two-equation turbulence model.
Notwithstanding the similarities between the boundary layersat the bottom of internal and surface solitary waves, a quantitativecomparison of the results described in the following sections withthose obtained considering internal waves is neither describedhereinafter nor was performed. Indeed, the internal wave case isusually characterized by a different spatial/temporal forcing termand quite often a steady current is superimposed to the unsteadymotion generated by the internal wave. Moreover, numerical sim-ulations of the flow generated close to the bottom by internalwaves are sometimes carried out by considering density stratifica-tions. The readers can easily make themselves a qualitativecomparison.
The remainder of the paper is organized as follows. In Section 2,we formulate the problem and describe the different approacheswhich are used to obtain the results which are presented and dis-cussed in Section 3. The conclusions are drawn in Section 4.
2. Formulation of the problem and solution methods
2.1. Formulation of the problem
A solitary wave of height H⁄ is considered (hereinafter a star de-notes a dimensional quantity and the same symbol without star itsdimensionless counterpart). The wave is assumed to propagate ona constant water depth h⁄. As pointed out in the Introduction, theReynolds number of the phenomenon is assumed to be large andthe fluid domain is split into a core region, where the fluid behaveslike an inviscid fluid, and boundary layers, where viscous effectsare important. The flow in the core region can be studied introduc-ing the following dimensionless variables:
t ¼ t�ffiffiffiffiffiffiffiffiffiffig�h�
ph�
; ðX1;X2;X3Þ ¼ðX�1;X
�2;X
�3Þ
h�; g ¼ g�
H�;
ðV1;V2;V3Þ ¼ðV�1;V
�2;V
�3Þ
Hffiffiffiffiffiffiffiffiffiffig�h�
p ð1Þ
where t⁄ indicates the time and X�1;X�2;X
�3
� �denote Cartesian coor-
dinates with the X�1-axis aligned with the direction of wave propa-gation and the X�2-axis in the vertical direction and pointing upward(X�2 ¼ 0 describes the bottom). Moreover, in (1), g⁄ is the free sur-face elevation with respect to the still water level, V�1;V
�2;V
�3
� �de-
note the velocity components and the dimensionless parameter
H ¼ H�
h�ð2Þ
is a measure of the wave height. Even though the most appropri-ate horizontal length scale would be a measure L⁄ the wavelengthof the solitary wave, the coordinates X�1 and X�3 are scaled by h⁄ be-cause the use of h⁄ makes the dispersion parameter l = h⁄/L⁄ todisappear from both the problem and its solution (Grimshaw,1970, 1971). As pointed out in Vittori and Blondeaux (2008), thereader can easily convert the problem formulated in the following,as well as its solution, into that obtained using a conventionallength scale L⁄ of the solitary wave as horizontal length scaleand L�=
ffiffiffiffiffiffiffiffiffiffig�h�
pas time scale.
The free surface elevation and the velocity field in the inviscidregion were obtained by Grimshaw (1970, 1971) by expandingthem in terms of the small parameter H. The leading order solutionreads
g ¼ s2; V1 ¼ s2; V2 ¼ �ffiffiffiffiffiffiffi3Hp
X2s2 tanh
ffiffiffiffiffiffiffi3H4
rðX1 � tÞ
" #ð3Þ
In (3), the variable s is defined by
s ¼ sech
ffiffiffiffiffiffiffi3H4
rðX1 � tÞ
" #ð4Þ
The water depth h⁄ is not the appropriate length scale to ana-lyze the flow in the bottom boundary layer, which is characterized
by a thickness of order d� ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m�h�=
ffiffiffiffiffiffiffiffiffiffig�h�
pqwhich turns out to be
much smaller than h⁄. Hence, let us introduce the new spatialvariables,
ðx1; x2; x3Þ ¼ðX�1;X
�2;X
�3Þ
d�ð5Þ
and let us denote with (v1, v2, v3) the dimensionless velocity compo-nents within the bottom boundary layer.
Then, the hydrodynamic problem turns out to be posed by con-tinuity and Navier–Stokes equations which, in dimensionless form,read
@v j
@xj¼ 0;
@v i
@tþ H
d
� �v j@v i
@xj¼ � H
d
� �@p@xiþ 1
2@2v i
@xn@xn
ði ¼ 1;2;3Þ ð6Þ
where use is made of Einstein summation convention, the dimen-sionless dynamic pressure p = p⁄/(H2q⁄g⁄h⁄) is introduced and thedimensionless parameter d is defined as the ratio between thedimensional thickness of the boundary layer and the local waterdepth
d ¼ d�
h�¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m�
h�ffiffiffiffiffiffiffiffiffiffig�h�
ps
ð7Þ
Of course, the velocity far from the bottom should match the irrota-tional flow and satisfy the no-slip condition at the bottom. Thematching with the irrotation flow far from the bottom, i.e. for x2
much larger than one, suggests the introduction of the modifiedpressure ~p:
@~p@x1¼ @p@x1þ d
H@V1
@t
� �X2¼0
ð8Þ

402 G. Vittori, P. Blondeaux / Progress in Oceanography 120 (2014) 399–409
where ð@V1=@tÞX2¼0 can be computed on the basis of the time deriv-ative of the irrotational velocity (3).
2.2. The laminar solution
If the flow regime is assumed to be laminar, the leading ordersolution of the problem formulated Section 2.1 is described in textbook (e.g. Mei, 1989). The velocity component v2 and v3 vanish andthe streamwise velocity component reads
v̂ðX1; x2; tÞ ¼ V1ðX1; tÞ �2ffiffiffiffipp
Z 1
0sech2
ffiffiffiffiffiffiffi3H4
rx2
2
2n2 þ X1 � t� �" #
e�n2dn ð9Þ
2.3. The linear stability analysis of the laminar flow
The experimental results of Sumer et al. (2010) show that theflow described by (9), which is observed for a relatively weak freestream velocity, turns out to be unstable if the external velocity isincreased. To determine the values of the parameters discriminat-ing between the laminar and turbulent regimes, Blondeaux et al.(2012) have recently investigated the stability of (9) by means ofa linear stability analysis.
Since Squire’s theorem holds also in unsteady flows (Conradand Criminale, 1965), a two-dimensional perturbation of the flowdescribed by (9) is considered such that
ðv1;v2Þ ¼ ðv̂;0Þ þ � v 01;v 02� �
ð10Þ
A linear analysis of the time development of the perturbation can beperformed by assuming that the amplitude � of the perturbation ismuch smaller than one. By neglecting terms of order �2 and intro-ducing the streamfunction w such that
v 01;v02
� �¼ @w
@x2;� @w
@x1
� �ð11Þ
the linearized vorticity equation reads
@3w
@t@x21
þ @3w
@t@x22
þ Hd
v̂ @3w
@x31
þ @3w
@x1@x22
� @2v̂@x2
2
@w@x1
" #
¼ 12
@4w
@x41
þ @4w
@x42
þ 2@4w
@x21@x2
2
!ð12Þ
The linearity of (12) allows a normal mode analysis to be madeand a generic Fourier component along the x1-axis to be consid-ered. Moreover, since the height H⁄ of a solitary wave is usuallymuch larger than the thickness d⁄ of the viscous boundary layer,the value of the ratio H/d turns out to be much larger than one.Therefore, the amplitude of the perturbation can be supposed togrowth on a time scale much faster than that which character-izes the time development of the basic flow and a ’momentary’criterion for instability (Shen, 1961; Blondeaux and Seminara,1979) can be used. Hence, the function w can be written inthe form
wðx1; x2; tÞ ¼ f ðx2; tÞ exp �iaHd
ZcðsÞds
� �expðiax1Þ þ c:c ð13Þ
where c.c. stands for the complex conjugate of a complex quantityand a indicates the streamwise wavenumber of the generic Fouriercomponent. The real part (cr) of c is related to the wavespeed of theFourier component and the imaginary part (ci) controls the growth/decay of its amplitude.
If (13) is plugged into vorticity Eq. (12), the following differen-tial equation is obtained
½v̂1ðx2; tÞ � cðtÞ�N2f ðx2; tÞ �@2v̂ðx2; tÞ
@x22
f ðx2; tÞ ¼1
2iaðH=dÞN4f ðx2; tÞ
ð14Þ
where the operator N2 is defined by
N2 ¼ @2
@x22
� a2 ð15Þ
To close the problem, the following homogeneous boundaryconditions should be forced
@f ðx2; tÞ@x2
¼ 0 f ðx2; tÞ ¼ 0 at x2 ¼ 0 ð16Þ
@f ðx2; tÞ@x2
! 0 f ðx2; tÞ ! 0 for x2 !1 ð17Þ
As pointed out in Blondeaux et al. (2012), the viscous term, which isof order d/H, is retained in (14) since it is significant in a viscouslayer close to the wall and within possible critical layers. We noticethat the time variable t⁄ and the spatial variable X�1 appear into theproblem posed by (6) and (8) only in the combination
f ¼ X�1 �ffiffiffiffiffiffiffiffiffiffig�h�
pt�
h�¼ X1 � t ð18Þ
which can be considered as a parameter of the problem. Then, Eq.(14) can be solved for different values of f which correspond at dif-ferent locations and/or at different phases within the wave cycle. Inthe following, X1 is set equal to 0 in such a way that a vanishing va-lue of f corresponds to the passage of the wave crest at X1 = 0. In or-der to find a nonvanishing solution of the differential problem justformulated, it is necessary to force an eigenrelation which providesthe value of c as function of f and the parameters H and d of theproblem. The details of the numerical approach which is employedto find the eigenrelation and the eigensolution are described inBlondeaux et al. (2012).
2.4. The direct numerical simulations
To determine the velocity field in the turbulent regime, the gov-erning Eq. (6) are solved numerically (Direct Numerical Simula-tion) by means of a finite difference approach in a computationaldomain characterized by dimensions L1, L2 and L3 in the stream-wise, vertical and spanwise directions, respectively.
Appropriate boundary conditions are forced at the boundariesof the computational domain. At the bottom (x2 = 0) the no-slipcondition is forced. Since, for large values of x2, the flow shouldtend to the solution in the core region, at x2 = L2 we force @(v1,v3)/@x2 = 0 and v2 = 0. Of course L2 should be sufficiently large tobe outside the viscous boundary layer. At last, by assuming thatL�1 and L�3 are much larger than the size of the turbulent eddieswhich develop within the boundary layer, turbulence structure issupposed to be homogeneous in the streamwise and spanwisedirections and periodic boundary conditions are forced along thex1 and x3 axes. Of course, the use of periodic boundary conditionsis justified if the computational box is large enough to includethe largest eddies generated by turbulence appearance. Checkson the size of the computational box have been carried out to ver-ify this assumption. The computational mesh is uniform in thestreamwise and spanwise directions while in the vertical directiona nonuniform mesh is used to cluster the grid points close to thebottom where velocity gradients are expected to be larger.
The numerical method solves the problem in primitive variablesusing standard centered second-order finite difference approxima-tions of the spatial derivatives, while the time-advancement of

G. Vittori, P. Blondeaux / Progress in Oceanography 120 (2014) 399–409 403
2Navier–Stokes equations employs the fractional-step methodextensively described by Kim and Moin (1985) and Rai and Moin(1991). More details on the numerical approach can be found Ver-zicco and Vittori (1996) and Vittori and Verzicco (1998).
Since the numerical simulations start when the solitary wave isfar from the location where the time development of the boundarylayer is computed, vanishing velocity and pressure fields would bethe most appropriate initial condition.
To trigger transition and turbulence appearance, it is necessaryto introduce a perturbation of the laminar flow. This can be madeeither by adding a small random but divergence-free velocity fieldto the initially vanishing velocity field or by considering wallimperfections (Blondeaux and Vittori, 1994), i.e. a bottom wavi-ness of quite small amplitude superimposed to the perfectly flatbottom. The former procedure was used by Vittori and Blondeaux(2008) while the latter procedure was employed by Blondeauxet al. (2012). The introduction of a bottom waviness has the advan-tage that a small but known perturbation is present at any wavephase. On the other hand, the perturbation introduced at thebeginning of the numerical simulation decays during the earlystages of the simulation and attains an uncontrolled amplitude atthe beginning of the decelerating period when the instability ofthe laminar flow takes place.
2.5. The Reynolds averaged model
The direct numerical simulations provide a detailed picture ofthe flow field but the power of actual computers does not allowthe use of this approach for practical applications. To investigatefield cases, the boundary layer generated by the propagation of asolitary wave can be studied by considering RANS equations anda two-equation turbulence model. Blondeaux and Vittori (2012)used the model of Saffman (1970) (see also Saffman and Wilcox(1974)). This model appears to provide a fair description of unstea-dy boundary layers as shown by Blondeaux (1987), Foti and Scan-dura (2004) and Cavallaro et al. (2011) who successfully applied itto investigate turbulence structure in the boundary layer gener-ated at the bottom of a progressive sea wave. In particular, the re-sults obtained by Blondeaux (1987),Foti and Scandura (2004) andCavallaro et al. (2011) show the capability of the model to providea fair description of the differences between turbulence structureduring the accelerating and decelerating phases of the wave cycleand to give an approximate description of the transition processfrom the laminar regime to the turbulent regime. The Reynoldsstress tensor is expressed in terms of an eddy viscosity m�T and ofthe rate of the strain tensor of the mean velocity field. Then, theeddy viscosity is assumed to be a function of two turbulence localproperties, namely a pseudo-energy e⁄ and a pseudo-vorticity X⁄,which are assumed to satisfy nonlinear advection–diffusionequations.
The introduction of the boundary layer approximation reducesthe problem to the determination of v1(x2, t) which is providedby the solution of the x1-component of the Reynolds averaged Na-vier–Stokes equation
@v1
@t¼ @V1
@t
� �X2¼0þ 1
2@
@x21þ m�T
m�
� �@v1
@x2
� �ð19Þ
Of course in (19), the velocity component v1 is meant to be the Rey-nolds average of the actual velocity. Moreover, the convective termis neglected in (19) because the wave height is assumed small en-ough to use Korteweg and De Vries’ approach to describe thedynamics of the solitary wave.
As already pointed out, the pseudo-energy e⁄ and the pseudo-vorticity X⁄ obey nonlinear advection–diffusion equations. Byintroducing the dimensionless variables
e ¼ e�
Hg�d�X ¼ X�d�
Hffiffiffiffiffiffiffiffiffiffig�h�0
p ð20Þ
the equations of Saffman’s model read
@e@t¼ H
de ae
@�v1
@x2
� beX
� �þ 1
2@
@x21þ re
m�Tm�
� �@e@x2
� �ð21Þ
@X2
@t¼ H
dX2 aX
@�v1
@x2
� bXX
� �þ 1
2@
@x21þ rX
m�Tm�
� �@X2
@x2
" #ð22Þ
where ae, aX, be, bX, ce, cX are assumed to be universal constants.Moreover, the assumption that turbulence characteristics are fullydetermined by the knowledge of e⁄ and X⁄ and the use of dimen-sional arguments lead Saffman (1970) to write m�T in the form
m�T ¼ cme�
X�or mT ¼ cm
m�Tm�¼ 2cm
eX
ð23Þ
The values of the constants were determined by Saffman andWilcox (1974)
ae ¼ 0:3; be ¼ a22; re ¼ 0:5; bX ¼ 0:18;
aX ¼ aebX
be� 0:32
ae
� �; cm ¼ 1: ð24Þ
At the bottom, the velocity satisfies the no-slip condition. Moreover,Saffman (1970) postulated that the pseudo-vorticity depends on adimensionless roughness parameter zw ¼ z�r u�s=m� through a univer-sal function S(zw), z�r and u�s ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffis�w=q�
pbeing the bottom roughness
and friction velocity, respectively and s�w is the bottom shear stress
X� ¼ s�wq�m�ae
SðzwÞ ð25Þ
Later Saffman and Wilcox (1974) related the function S to the uni-versal logarithmic velocity profile. However, they did not provide anexplicit relationship for S which was obtained by Blondeaux andColombini (1985). Finally, the pseudo-energy should vanish forx2 = 0.
To trigger turbulence appearance, it is necessary to introduce aperturbation of e either at the beginning of the numerical simula-tion or at the wall. While the former approach simulates the pres-ence of a disturbance of the initial flow field, the latter proceduresimulates the effect of wall imperfections which, as already dis-cussed, play a key role in triggering transition to turbulence in un-steady boundary layers. Hence, the second approach is presentlypreferred and transition to turbulence depends on the value ew ofe at the wall. The results described in the following are obtainedby fixing ew = 10�18, but a few runs have been made with differentvalues of ew to detect the effects that the ’amplitude’ of the wallimperfections has on transition to turbulence. The reader shouldconsider that, even though the results described in the followingseem to suggest that the model equations can describe the transi-tion process, accurate quantitative predictions of the critical condi-tions are not expected since the two-equation model of Saffman isnot designed to follow the transition process.
Momentum Eq. (19) along with (21) and (22), which describeturbulence dynamics, are numerically integrated with a second or-der finite difference approach to approximate spatial derivativesand a second order Runge–Kutta approach to advance in time.
3. The results
3.1. The linear stability analysis
The eigenvalue problem formulated in Section 3.3 can be solvedby fixing the values of d and H and by varying the parameter f. Thedescription of the numerical approach employed to determine thesolution of (14) with boundary conditions (16) and (17) is given in

404 G. Vittori, P. Blondeaux / Progress in Oceanography 120 (2014) 399–409
Blondeaux et al. (2012) and it is not repeated herein for the sake ofspace.
An example of the results is shown in Fig. 1, where the imagi-nary part ci of the eigenvalue c is plotted as function of f and afor fixed values of H and d, namely H = 0.12 and d = 5 � 10�4. Posi-tive values of ci are found for f larger than fins. Hence, for such val-ues of H and d, the basic laminar regime turns out to be unstable assoon as f becomes larger than fins, i.e. during the deceleratingphase.
If the fastest growing Fourier component (f.g.F.c) is assumed toprevail on the other modes, the linear analysis predicts the appear-ance of a periodic pattern characterized by a wavelength k⁄ suchthat 2pd⁄/k⁄ equals the value amax of a which gives rise to the max-imum growth rate. Therefore, the wavelength k⁄ of the most unsta-ble Fourier component would seem to depend on the phase withinthe wave cycle and the periodic patterns predicted by the stabilityanalysis would be characterized by a wavelength which dependson time. However, as pointed out by Blondeaux et al. (2012), oncethe perturbation appears, its wavelength cannot change continu-ously but only through the appearance of defects, the dynamicsof which can be studied only by means of a fully nonlinearapproach.
A reasonable assumption, which can be made, is that the actualwavelength of the periodic pattern is coincident with the wave-length predicted for f = fins. This assumption is supported by theexperimental visualizations of Sumer et al. (2010), which showno significant change of the wavelength of the vortex tubes whichare generated by the growth of the perturbations.
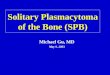
To ascertain the reliability of the analysis, Blondeaux et al.(2012) compared the predicted wavelengths with the experimen-tal measurements of Sumer et al. (2010). Fig. 2 shows a plane viewof the two-dimensional vortical structures (vortex tubes) visual-ized by Sumer et al. (2010) for a maximum value of the free streamvelocity U�0m equal to 50.9 cm/s and T� ¼ 4ph�=
ffiffiffiffiffiffiffiffiffiffiffiffiffi3g�H�
p¼ 9:3 s. The
average distance between the axes of adjacent vortex tubes isabout 2.4 cm, a value which is close to the wavelength of thef.g.F.c. evaluated for f = fins which is about 2.9 cm. Similar resultsare obtained when the other experiments made by Sumer et al.(2010) are considered (see Blondeaux et al., 2012). In particular,Fig. 3 shows a comparison between the predicted values of k⁄/d⁄
and the range of the observed values for the three movies whichare available at http://journals.cambridge.org and one extra moviewhich has been made available by Prof. Sumer who provided alsothe range of the observed wavelengths.
0.1
0.2
0.3
0.4
0.5
0.6
0 2 4 6 8 10 12 14
α
ζζins
Fig. 1. Growth rate (imaginary part ci of the eigenvalue c) plotted versus f and a forH = 0.12 and d = 5.0 � 10�4. The thin continuous lines correspond to positive valuesof ci, the thick continuous lines corresponds to ci = 0, the thin broken linescorrespond to negative values (Dci = 0.005). The thick broken line corresponds tothe fastest growing Fourier component (a = amax).
The discussion of the results concerning the critical conditionsand the phase of the wave cycle at which the external perturba-tions start to grow is postponed to Section 3.2, since the theoreticalpredictions of the stability analysis can be better understood afterthe discussion of the results of the Direct Numerical Simulations.
3.2. The direct numerical simulations
Since the flow in the bottom boundary layer depends on H andd, Vittori and Blondeaux (2008) made a large number of directnumerical simulations for different values of H and d. Accordingto the stability analysis, the numerical results show that the flowcan be either laminar or turbulent depending on the values ofthe parameters and on the wave phase.
Fig. 4 shows the time development of the longitudinal velocitycomponent close to the bottom for a fixed value of d (namely4.75 � 10�4) and three different values of H which correspond towaves of different height propagating in water of fixed depth.When H is relatively small (H = 0.1), the flow regime is laminarand the velocity computed numerically does not differ from thevelocity predicted by means of (9).
Transition to turbulence is triggered for larger values of H andturbulence presence is shown by the appearance of random veloc-ity fluctuations superimposed to the average velocity field. For theintermediate value of H, namely H = 0.2, the velocity fluctuationsappear after the velocity in the boundary layer has attained theminimum negative value. These velocity fluctuations have largeamplitudes and an analysis of the vorticity field shows that thesefluctuations are generated by large scale migrating coherent vorti-ces which, after Sumer et al. (2010), are named vortex tubes. Atthese phases, even though the vortex structures are generated bythe instability of the basic flow, the regime cannot be defined tur-bulent since three-dimensional effects are absent.
Only later, the two-dimensional vortices break-up and generateincoherent eddies and give rise to a fully three-dimensional turbu-lent flow. If larger values of H are considered, the inviscid flowclose to the bottom is characterized by stronger adverse pressuregradients. The resulting stronger deceleration induces transitionfrom the laminar regime to a three-dimensional turbulent flowwithout the appearance of coherent transverse vortex tubes.
Fig. 5 shows the flow regimes for all the runs made by Vittoriand Blondeaux (2008). In a few cases, for values of H close to thecritical conditions, the vortex tubes generated by the growth ofTollmein-Schilchting waves do not break-up but slowly dissipatebecause of viscous effects. Hence, the flow cannot be defined tur-
Fig. 2. Visualization of transverse tubes which appear during the deceleratingphase for U�0m ¼ 50:9 cm/s, T� ¼ 4ph�=
ffiffið
p3g�H�Þ ¼ 9 s (the image has been kindly
provided by Prof. Sumer. The movies of the experimental visualisations can be seenat journals.cambridge.org/flm).

0
5
10
15
20
25
30
35
40
0 5 10 15 20 25 30 35 40
(λ* /δ
* ) pre
dict
ed
(λ*/δ*)observed
Fig. 3. Dimensionless wavelength of the most unstable Fourier mode predicted bythe stability analysis plotted versus the average dimensionless distance betweenthe adjacent vortex tubes visualized by Sumer et al. (2010).
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
-10 -5 0 5 10 15 20
v 1
ζ
H=0.1H=0.2
H=0.5
Fig. 4. Time development of the dimensionless streamwise velocity component ford = 4.75 � 104 and H = 0.1 (at x2 = 0.34), H = 0.2 (at x2 = 0.34) and H = 0.5 (atx2 = 0.29). Adapted from Vittori and Blondeaux (2008).
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0 0.0005 0.001 0.0015 0.002 0.0025
H
δ
laminar regimetransitional regimeturbulent regime
Fig. 5. Flow regime in the plane (d, H). The continuous line represents the curveRe = 2 � 105, which Sumer et al. (2010) suggest to be the limit for the appearance ofthe transitional regime, and the broken line represents the curve Re = 5 � 105 whichis the limit for turbulence appearance. Adapted from Vittori and Blondeaux (2008).
1e-09
1e-07
1e-05
0.001
0.1
-5 0 5 10 15 20
K
ζ
H=0.025H=0.2
H=0.4
H=0.6
Fig. 6. Dimensionless kinetic energy K of flow perturbations plotted versus f ford = 1.2 � 10�3 and different values of H. Adapted from Vittori and Blondeaux (2011).
G. Vittori, P. Blondeaux / Progress in Oceanography 120 (2014) 399–409 405
bulent and the term ‘‘transitional regime’’ is introduced. Thenumerical results show that the instability of the basic laminarflow takes place when the value of H is larger than a critical valueHc which increases when d is increased. The dependence of Hc on dwas observed also by Sumer et al. (2010) who proposed to intro-duce a critical value Rec of the Reynolds numberRe ¼ 4H3=2=ð
ffiffiffi3p
d2Þ such that for Re larger than Rec, the laminar flowis unstable.
To discriminate between the laminar regime and the transi-tional regime, Sumer et al. (2010) proposed a value of Rec equalto 2 � 105. Moreover, Sumer et al. (2010) proposed a value Ret
equal to 5 � 105 to discriminate between the transitional regimeand the fully three-dimensional turbulent regime. The numericalresults, shown in Fig. 5, compared with Sumer et al.’s criteria, seemto suggest larger values of both Rec and Ret.
A possible explanation of the differences between the numericalresults and the experimental measurements is provided by theexternal sources of significant perturbations (e.g. vibrations ofthe experimental apparatus) which might play a significant rolein the transition process, significantly lowering the critical valuesof Re. A similar phenomenon is observed in the oscillatory bound-ary layer (Stokes layer) generated by a monochromatic sea wave(Blondeaux and Vittori, 1994).
The existence of a critical value of H which depends on d isshown also by the linear stability analysis described in Section 2.However, significant quantitative differences are found, since the
stability analysis predicts values of Hc which are much smallerthan those predicted by the numerical simulations and/or observedin the experiments. This finding can be explained by assuming thatboth in the direct numerical simulations and in the experiments,the perturbations grow but, for values of H close to Hc, attainamplitudes too small to be visually detected. This assumptionhas been tested running the numerical code of Vittori and Blon-deaux (2008).
Fig. 6 shows the dimensionless kinetic energy per unit area K ofthe flow perturbations plotted versus the phase f within the wavecycle for different values of H and d = 1.2 � 10�3. For H = 0.025, thekinetic energy of the perturbation tends to decay as predicted bythe linear stability analysis. If larger values of H are considered(e.g. H = 0.2), the kinetic energy deviates from that found for thestable case even though the growth of K is very weak and doesnot lead to the appearance of significant perturbations of the veloc-ity field. Only when H is equal to 0.5 or larger, the values of K be-come significant and the flow deviates from the laminar flow. Ofcourse, the process is continuous and there is some arbitrarinessin the definition of the value of H which gives rise to a turbulentflow. Indeed, Vittori and Blondeaux (2008, 2011) introduced anarbitrary threshold value of K to discriminate between the laminarand the turbulent regimes.
The results obtained by means of Direct Numerical Simulationsexplain also the differences between the values of fins predicted bythe stability analysis and those at which Sumer et al. (2010) ob-

406 G. Vittori, P. Blondeaux / Progress in Oceanography 120 (2014) 399–409
served vortex tubes. Indeed, Fig. 6 shows that there is a significanttime lag between the beginning of the growth of the perturbationsand the phase at which they attain a significant level such to allowtheir visual observation.
From an engineering point of view, the most relevant quantitiesare Reynolds averaged quantities and in particular the averagevelocity and the average bottom shear stress. Because of the homo-geneity of the flow in the two horizontal directions, averaged val-ues are computed by averaging over planes characterized byconstant values of x2.
Sometimes in turbulent flows, the average velocity profile closeto a wall is assumed to follow the logarithmic law. However, thenumerical simulations show that the velocity profiles are ratherdifferent from those provided by both the log-law and the Van Dri-est law, if moderate values of H are considered. Only for large val-ues of H, there are phases for which the velocity profile becomesclose to the logarithmic law. However, the logarithmic law holdsin such a small time interval and for such a restricted range ofthe parameters that its general use is questionable (see also Sumeret al., 2010).
In depth-averaged models, the averaged bottom shear stress s⁄
is usually evaluated by means of the Chezy law and s⁄ is assumedto be proportional to the square of the irrotational velocity evalu-ated at the bottom (s� ¼ qcf V�1jV
�1kX2¼0, cf being a drag coefficient).
However, the results of Liu et al. (2007) for the laminar regime andthose of Blondeaux and Vittori (2012) for the turbulent regime (seeFig. 7) show that the bottom shear stress reverses its direction dur-ing the late decelerating phase, while V�1jX2¼0 points always in thedirection of wave propagation. Hence, the relationships� ¼ qcf V�1kV
�1jX2¼0 certainly fails after the passage of the wave
crest. Moreover, the laminar solution and the turbulent resultsshow that a phase shift between the maximum of the irrotationalvelocity and that of the bed shear stress is also present. In fact, thetime development of the bottom shear stress (Fig. 7) shows a max-imum value, which is attained slightly before the passage of thewave crest. The value of smax as well as its phase shift Dtmax, withrespect to that of the maximum velocity are discussed in Vittoriand Blondeaux (2008) who analyzed also the smallest value smin
of s and its phase.
3.3. The Reynolds averaged model
Both the direct numerical simulations of Vittori and Blondeaux(2008, 2011) and the experimental measurements of Sumer et al.(2010) show that the flow regime keeps laminar throughout thewhole wave cycle if small values of H are considered. If the RANS
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
-20 -15 -10 -5 0 5 10 15 20
τ
ζ
H=0.1H=0.2H=0.3H=0.4H=0.5
Fig. 7. Time development of the dimensionless bottom shear stress s = 2s⁄/(Hq⁄g⁄d⁄) for d = 0.475 � 10�3 and different values of H. Adapted from Vittori andBlondeaux (2011).
model described in Section 2.5 is run for a small value of H, thepseudo-energy e turns out to be negligible during the whole simu-lation and the eddy viscosity is practically equal to zero. It followsthat the velocity field does not differ from the laminar solution. Inthis case the flow is not affected by the value of bottom roughness.
If the value of d is kept fixed and the value of H is increased, acritical value Hc is encountered such that for values of H just largerthan Hc, the value of e, which is initially zero, grows explosivelyduring the decelerating phase, it attains significant valeus and aturbulent flow appears. If the value of H is further increased, signif-icant values of the pseudo-energy e appear earlier and e attainsmuch larger values as shown by Fig. 8 where the value ofEðtÞ ¼
R10 eðx2; tÞdx2 is plotted versus time for a fixed value of d
and different values of H.The flow regimes (laminar/turbulent) determined by means of
the RANS model are shown in Fig. 9. The value of the eddy viscos-ity, which is used to identify the flow regime, is a continuous func-tion of the parameters. Therefore, to discriminate among laminar,transitional and turbulent regimes on the basis of a quantitativecriterion, the flow is defined to be laminar if the maximum valueof the ratio m�T=m� during the wave cycle is smaller than 1. On theother hand, if the maximum value of the ratio m�T=m� is larger than10, the flow regime is defined to be turbulent. Values of the max-imum of m�T=m� within the range (1,10) are supposed to characterizethe transitional regime. The results plotted in Fig. 9 show that tran-sition to turbulence takes place when the parameter H is largerthan a critical value Hc which depends on d. As found by Vittoriand Blondeaux (2011), Hc increases when d is increased. The resultsplotted in Fig. 9 have been obtained by fixing z�r equal to 0.01 d⁄.Such a value of the bottom roughness leads to the smooth wall re-gime and both the transition limits and the turbulence characteris-tics do not depend on zr. Indeed, results equal to those shown inFig. 9 are obtained if the value of z�r is slightly changed but z�r is keptsmaller than 5m�=u�s, u�s ¼
ffiffiffiffiffiffiffiffiffiffiffiffis�=q�
pbeing the shear velocity. To allow
a comparison between the results of the RANS model and theexperimental measurements of Sumer et al. (2010), the empiricalcurves proposed by Sumer et al. (2010) are also plotted in Fig. 9.
The use of a RANS model allows the rough bottom case to beconsidered, too. Indeed, as soon as z�r becomes larger than 5m�=u�s,the bottom roughness affects the transition process from the lam-inar to the turbulent regime as well as the turbulent flow. Forexample, Fig. 10 shows the flow regimes as function of H and dwhen the dimensionless roughness zr is equal to 1. ComparingFig. 10 with Fig. 9, it appears that an increase of zr leads to a signif-icant decrease of the transition limit between the transitional andturbulent regimes even though the limit between the laminar and
0
2
4
6
8
10
12
14
-20 -15 -10 -5 0 5 10 15 20
E
ζ
H=0.1H=0.2
H=0.3
H=0.4
H=0.5
H=0.6
Fig. 8. Pseudo-energy per unit area of the sea bottom plotted versus f for d = 0.0008and zr = 0.01. Adapted from Blondeaux and Vittori (2012).

0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0 0.0005 0.001 0.0015 0.002 0.0025
H
δ
Re=2 105
Re=5 105
laminar regimetransitional regimeturbulent regime
Fig. 9. Flow regime in the plane (d, H) for zr = 0.01. The continuous line representsthe curve Re = 2 � 105, which Sumer et al. (2010) suggest to be the limit for theappearance of the transitional regime, and the broken line represents the curveRe = 5 � 105 which is the limit for turbulence appearance. Adapted from Blondeauxand Vittori (2012).
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0 0.0005 0.001 0.0015 0.002 0.0025
H
δ
Re=2 105
Re=5 105
laminar regimetransitional regimeturbulent regime
Fig. 10. Flow regime in the plane (d, H) for zr = 1. The continuous line represents thecurve Re = 2 � 105, which Sumer et al. (2010) suggest to be the limit for theappearance of the transitional regime, and the broken line represents the curveRe = 5 � 105 which is the limit for turbulence appearance. Adapted from Blondeauxand Vittori (2012).
-0.5
0
0.5
1
1.5
2
2.5
-8 -6 -4 -2 0 2 4 6
τ w/τ
max
,1
ζ
ew=10-32
ew=10-36
ew=10-40
Fig. 11. Bottom shear stress plotted versus time for zr = 0.01 and values of d and Hsuch that Re = 2 � 106 (H = 0.23, d = 0.00038). Continuous lines = present results,white points=Sumer et al. (2010)s measurements. Adapted from Blondeaux andVittori (2012).
G. Vittori, P. Blondeaux / Progress in Oceanography 120 (2014) 399–409 407
transitional regimes is not significantly affected by the changes ofz�r .
As already pointed out, for practical applications a detailedknowledge of the flow within the bottom boundary layer is notnecessary, while it is important to evaluate the value of the bottomshear stress s⁄. As already discussed in Section 3.2, the relationships� ¼ qcf V�1kV
�1jX2¼0 fails after the passage of the wave crest, when
the bottom shear stress reverses its direction. This qualitative find-ing is shown also by the results of the RANS model. Indeed, theexplosive growth of turbulence, which takes place during thedecelerating phase of the wave cycle, leads to a significant differ-ence between the accelerating and decelerating phases of the wavecycle and to a second positive peak of the bottom shear stress, theexistence of which is also shown by the experimental measure-ments of Sumer et al. (2010). Fig. 11 shows a comparison betweenthe present results and some of the laboratory data obtained by Su-mer et al. (2010), for Re = 2.0 � 106. As in Sumer et al. (2010), thebottom shear stress is scaled with its maximum value smax, whichtakes place just before the maximum of the irrotational velocity.The different curves obtained by means of the RANS model andplotted in Fig. 11 are characterized by different values ew (we re-mind to the reader that ew if the value of e forced at the wall).The best agreement between the prediction of the present model
and the measurements of Sumer et al. (2010) is obtained forew = 10�40. However, since the level of the external disturbancesdepends on the experimental equipment, the value of ew to be usedcannot be considered to be universal. Moreover, it is worth point-ing out that, even though the value of ew affects the results when His close to Hc, the value of ew does not significantly affect the re-sults, when the amplitude of the solitary wave is much larger thanits critical value (Blondeaux and Vittori, 2012).
3.4. The sediment transport
Once the flow in the bottom boundary layer is determined, thesediment dynamics can be determined with different approaches.For example, Vittori (2003) used the results of direct numericalsimulations and computed sediment trajectories integrating New-ton’s law for each sediment particles. However, this approach can-not be used for practical applications because of the highcomputational costs. In the following, a more heuristic approachis employed and the sediment transport is splitted into bed loadand suspended load (Blondeaux and Vittori, 1999). The formercan be evaluated using an empirical formula. presently, we useFredsoe and Deigaard’s (1992) formula
Qb ¼Q �bffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðq�s=q� � 1Þg�ðd�Þ3q ¼ 30
ph� hcð Þ
ffiffiffihp� 0:7
ffiffiffiffiffihc
p �ð26Þ
where the Shields parameter h is defined by
h ¼ s�
q�s � q�� �
g�d�ð27Þ
and hc is the critical value of the Shields parameter for the initiationof sediment motion. In (27) q�s ;d
� are the density and the size of thesediment, respectively. To estimate the suspended load, the sedi-ment concentration c can be calculated by integrating the equationof mass balance, assuming that the sediments are dragged by themotion of the water, diffuse because of turbulence and fall due totheir weight. Since sediment concentration decays rapidly awayfrom the bottom and c is significant only within the boundary layer,the sediment balance provides the following equation
@c@t¼ vs
Hd@c@x2þ 1
2@
@x2DT
@c@x2
� �� �ð28Þ
where the dimensionless sediment diffusivityDT can be assumed tobe equal to the dimensionless eddy viscosity and vs ¼ v�s=ðH
ffiffiffiffiffiffiffiffiffiffig�h�
pÞ
is the dimensionless sediment fall velocity which is assumed to

-10 0
10 20 30 40 50 60 70 80 90
100
-10 -8 -6 -4 -2 0 2 4 6 8 10
Qb,
Qs
ζ
Fig. 13. Bed load (continunous line) and suspended load (broken line) plottedversus the wave phase f (d = 0.0001, � = 0.5, zr = 3, Rp = 240 and d�=h�0 ¼ 0:00015).
408 G. Vittori, P. Blondeaux / Progress in Oceanography 120 (2014) 399–409
depend on the local value of the sediment concentration and on thesediment Reynolds number
Rp ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðq�s=q� � 1Þg�ðd�Þ3
qm�
ð29Þ
As already pointed out, c is assumed to vanish for x2 tending toinfinity, and c is set equal to cref for x2 = xref, where cref is providedby an empirical relationship and xref is set equal to twice the sizeof the sediment grains. Several formulae can be used to quantify cref.In this present paper, we use Zysermann and Fredsoe’s formula(Zyserman and Fredsoe, 1994).
cref ¼ 0:331cmðh� hcÞ1:75
cm þ 0:331ðh� hcÞ1:75 ð30Þ
where the maximum value cm of the concentration is assumed to be0.32. Then, the flux of sediment in the direction of wave propaga-tion, from the reference level up to the irrotational region, can becomputed by means of the following relationship
Q s ¼Q �sffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðq�s=q� � 1Þg�ðd�Þ3q ¼ �dffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
ðs� 1Þðd�=h�0Þ3
q Z 1
~x2;ref
ucdx2 ð31Þ
where the contribution due to the horizontal diffusion is neglected.In Figs. 12 and 13 the time development of the sediment trans-
port rate is plotted versus time for different values of the parame-ters, distinguishing the contributions due to the bed load (Qb) andthe suspended load (Qs). In Fig. 12 the sea bottom is made up offine sand (d⁄ = 0.2 mm) and the suspended load prevails on thebed load which is practically negligible. The sediment transportrate is characterized by the presence of a first maximum which isinduced by the passage of the wave crest but slightly shifted. Then,a second relative maximum of the sediment transport rate is ob-served, which is induced by turbulence which appears explosivelyduring the decelerating phase and picks up a lot of sediments fromthe bottom and put them into suspension. Finally, during the laterstages, the sediment transport reverses its direction and is directedtowards the offshore region because the flow in the proximity ofthe bottom reverses its direction. Similar results are obtained fordifferent values of the parameters even if the variation of sedimentcharacteristics gives rise to different values of the ratio betweenthe bed load and the suspended load. Indeed Fig. 13, where the val-ues of Qb and Qs are plotted as function of f for the same values ofthe parameters considered in Fig. 12 but for d⁄ = 2 mm, shows thatthe bed load, which is negligible for very fine sand (see Fig. 12), be-comes significant for coarse sand.
-200
0
200
400
600
800
1000
1200
1400
-10 -8 -6 -4 -2 0 2 4 6 8 10
Qb,
Qs
ζ
Fig. 12. Bed load (continunous line) and suspended load (broken line) plottedversus the wave phase f (d = 0.0001, � = 0.5, zr = 0.3, Rp = 7.5 and d�=h�0 ¼ 0:000015).
Finally, the volume of sand per unit width transported by a sol-itary wave can be easily estimated starting from the knowledge ofQb(t) and Qs(t),
V ¼ V�
h�2¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiðs� 1Þðd�=h�0Þ
3q Z 1
�1½Q bðtÞ þ Q sðtÞ�dt ð32Þ
4. Conclusions
The transition from the laminar regime to the turbulent regimewithin the smooth boundary layer at the bottom of a solitary waveis investigated using both a linear stability analysis and directnumerical simulations of the Navier–Stokes equations.
The results show that the laminar flow turns out to be unstablewhen the wave height is larger than a critical value which dependson the ratio between the thickness of the bottom boundary layerand the local water depth. Close to the critical conditions, thegrowth of the unstable components of the perturbations leads tothe formation of two-dimensional vortex structures (vortex tubes)with their axes parallel to the bottom and orthogonal to the direc-tion of wave propagation. The theoretical and numerical resultsqualitatively agree with the experimental observations of Sumeret al. (2010). Moreover, the quantitative differences between thepredictions and the experimental measurements can be explainedon the basis of physical arguments.
From a practical point of view, it can be assumed that:
(1) the laminar regime is unstable for values of the Reynolds
number Re ¼ 4H3=2ffiffi3p
d2 larger than 2 � 105,
(2) the two-dimensional vortex tubes, which are generated bythe growth the most unstable two-dimensional perturba-tions, are characterized by a relative distance of order
30d� ¼ 30ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2m�h�=
ffiffiffiffiffiffiffiffiffiffig�h�
pq,
(3) these two-dimensional vortex structures break and give riseto a fully turbulent flow, as soon as the value of Re is largerthan 5 � 105,
(4) close to the critical condition, both vortex tubes and turbu-lence tend to appear during the decelerating phase, i.e.behind the wave crest. If the wave height (or equivalentlythe Reyolds number) is further increased, turbulenceappears earlier and becomes more intense. Hence, for fieldconditions, it is likely that turbulence dominates a large partof the wave cycle.Moreover, the sea bed is usually rough. In order to gain someinformation on the transition limits and the characteristicsof the turbulent flow in the rough bottom case, the phenom-enon has been investigated using Reynolds averaged

G. Vittori, P. Blondeaux / Progress in Oceanography 120 (2014) 399–409 409
Navier–Stokes equations and the two-equation turbulencemodel of Saffman (1970), which seems to be able todescribed the gross features of the transition process inunsteady boundary layers.
(5) As expected, the bottom roughness destabilizes the bound-ary layer and turbulence appears for smaller values of theReynolds number.The use of RANS equations and a turbulence model allows adetailed investigation of the phenomenon in a wide range ofthe parameters and the evaluation of the sediment transportrate. The results obtained show that, for values of the param-eters describing field cases, turbulence picks up a lot of sed-iment from the bed and carry them into suspesion makingthe suspended load much larger than the bed load.
(6) Even though the flow and the bottom shear stress reversetheir direction during the late decelerating phases, the back-ward flow is weak and the net (time averaged) sedimenttransport points always in the direction of wavepropagation.
Acknowledgements
The paper was partially funded by the ‘Ministero dell’Istruzione,dell’Universitá e della Ricerca’ in the framework of the researchProject No. 2008YNPNT9-003 ‘Idrodinamica e morfodinamica nellaregione dei frangenti’ and by the University of Genoa through thecontract ‘Trasporto solido generato da onde di mare’. The authorsare grateful to prof. Sumer (Technical University of Denmark,DTU Mekanik, Section for Fluid Mechanics, Coastal and MaritimeEngineering) who kindly provided the image of Fig. 2.
References
Blondeaux, P., 1987. Turbulent boundary layer at the bottom of gravity waves.Journal of Hydraulic Research 25 (4), 447–464.
Blondeaux, P., Colombini, M., 1985. Pulsatile turbulent pipe flow. In: V Symposiumon Turbulent Shear Flows, Ithaca, August 7–9.
Blondeaux, P., Seminara, G., 1979. Transizione incipiente al fondo di un’onda digravitá. Accademia Nazionale dei Lincei 67, 408–411, Italian.
Blondeaux, P., Pralits, J., Vittori, G., 2012. Transition to turbulence at the bottom of asolitary wave. Journal of Fluid Mechanics 709, 396–407.
Blondeaux, P., Vittori, G., 1994. Wall imperfections as a triggering mechanism forStokes layer transition. Journal of Fluid Mechanics 264, 107–135.
Blondeaux, P., Vittori, G., 1999. Boundary layer and sediment dynamics under seawaves. Advances in Coastal and Ocean Engineering 4, 133–190.
Blondeaux, P., Vittori, G., 2012. RANS modelling of the turbulent boundary layerunder a solitary wave. Coastal Engineering 60, 1–10.
Bogucki, D.J., Redekopp, L.G., 1999. A mechanism for sediment resuspension byinternal solitary waves. Geophysical Research Letters 26 (9), 1317–1320.
Carstensen, S., Sumer, B.M., Fredsoe, J., 2010. Coherent structures in wave boundarylayers. Part 1. Oscillatory motion. Journal of Fluid Mechanics 646, 169–206.
Cavallaro, L., Scandura, P., Foti, E., 2011. Turbulence-induced steady streaming in anoscillatory boundary layer: on the reliability of turbulence closure models.Coastal Engineering 58, 290–304.
Conrad, P.W., Criminale, W.O., 1965. The stability of time-dependent laminar flows.Zeitschrift für Angewandte Mathematik und Physik 16, 233–254.
Costamagna, P., Vittori, G., Blondeaux, P., 2003. Coherent structures in oscillatoryboundary layers. Journal of Fluid Mechanics 474, 1–33.
Diamessis, P.J., Redekopp, L.G., 2006. Numerical investigation of solitary internalwave-induced global instability in shallow water benthic boundary layers.Journal of Physical Oceanography 36, 784–812.
Djordjevic, V.D., Redekopp, L.G., 1988. Linear stability analysis of nonhomentropic,inviscid compressible flows. Physics of Fluids 31, 3239–3245.
Foti, E., Scandura, P., 2004. A low Reynolds number k-� model validated for flowsover smooth and rough wall. Coastal Engineering 51, 173–184.
Fredsoe, J., Deigaard, R., 1992. Mechanics of Coastal Sediment Transport. WorldScientific.
Garret, C., Munk, 1979. Internal waves in the ocean. Annual Review of FluidMechanics 11, 339–369.
Grimshaw, R.H.J., 1970. The solitary wave in water of variable depth. Journal ofFluid Mechanics 42 (3), 639–656.
Grimshaw, R.H.J., 1971. The solitary wave in water of variable depth Part 2. Journalof Fluid Mechanics 46 (3), 611–622.
Grimshaw, R.H.J., Ostrovsky, L.A., Shrira, V.I., Stepanyants, Y.A., 1998. Nonlinearsurface and internal gravity waves in a rotating ocean. Surveys in Geophysics19, 289–338.
Hammond, D.A., Redekopp, L.G., 1998. Local and global instability properties ofseparation bubbles. European Journal of Mechanics – B/Fluids 17 (2), 145–164.
Helfrich, K.R., Melville, W.K., 2006. Long nonlinear internal waves. Annual Review ofFluid Mechanics 38, 395–425.
Keulegan, G.H., 1948. Gradual damping of solitary waves. RP1895, 40, U.S.Department of Commerce, National Bureau of Standards, 487–498.
Kim, J., Moin, P., 1985. Application of a fractional-step method to incompressibleNavier–Stokes equations. Journal of Computational Physics 59, 308–323.
Lin, Y., Redekopp, L.G., 2011. The wave-induced boundary layer under long internalwaves. Ocean Dynamics 61, 1045–1065.
Liu, P.L.F., 2006. Turbulent boundary layer effects on transient wave propagation inshallow water. Proceedings of the Royal Society of London 462 (2075), 3481–3491.
Liu, P.L.-F., Orfila, A., 2004. Viscous effects on transient long-wave propagation.Journal of Fluid Mechanics 520, 83–92.
Liu, P.L.F., Park, Y.S., Cowen, E.A., 2007. Boundary layer flow and bed shear stressunder a solitary wave. Journal of Fluid Mechanics 574, 449–463.
Mei, C.C., 1989. The Applied Dynamics of Ocean Surface Waves. Advanced Series onOcean Engineering, vol. 1. World Scientific.
Menter, F.R., 1994. Two-equation eddy-viscosity turbulence models for engineeringapplications. AIAA Journal 32 (8), 1598–1605.
Miles, 1980. Solitary waves. Annual Review of Fluid Mechanics 12, 11–43.Munk, W.H., 1949. The Solitary Wave Theory and its Applications to Surf Problems.
New York Academy, Science Annals.Ostrovsky, L.A., Stepanyants, Y.A., 1989. Do internal solitions exist in the ocean?
Reviews of Geophysics 27, 293–310.Rai, M.M., Moin, P., 1991. Direct simulations of turbulent flow using finite-
difference schemes. Journal of Computational Physics 96, 15.Saffman, P.G., 1970. A model for inhomogeneous turbulent flow. Proceedings of
Royal Society of London. Series A: Mathematical and Physical Sciences 317(1530), 417–433.
Saffman, P.G., Wilcox, D.C., 1974. Turbulence-model predictions for turbulentboundary layers. AIAA Journal 12, 541–546.
Shen, S.F., 1961. Some considerations on the laminar stability of incompressibletime-dependent basic flows. Journal of Aerospace Science 28, 397–404, and 417.
Staquet, C., Sommeria, J., 2002. Internal gravity waves: from instabilities toturbulence. Annual Review of Fluid Mechanics 34, 559–593.
Stastna, M., Lamb, K.G., 2002. Vortex shedding and sediment resuspensionassociated with the interaction of an internal solitary wave and the bottomboundary layer. Geophysical Research Letters 29 (11), 1512, 7-1-3.
Sumer, B.M., Jensen, P.M., Soerensen, L.B., Fredsoe, J., Liu, P.L.F., 2010. Coherentstructures in wave boundary layers. Part 2. Solitary motion. Journal of FluidMechanics 646, 207–231.
Suntoyo, Tanaka, H., 2009. Numerical modeling of boundary layer flows for asolitary wave. Journal of Hydro-environment Research 3, 129–137.
Tanaka, H., Winarta, B., Suntoyo, Yamaji, H., 2011. Validation of a new generationsystem for bottom boundary layer beneath solitary wave. Coastal Engineering59, 46–56.
U.S.A.C.E.; Coastal engineering Res. Center, 1984. Shore Protection Manual.Vicksburg, Miss., Department of Army, Waterways, Experiment Station, Corpsof Engineers, Coastal Engineering Research Center, Washington DC.
Verzicco, R., Vittori, G., 1996. Direct simulation of transition in Stokes layers. Physicsof Fluids 8 (6), 1341–1343.
Vittori, G., 2003. Sediment suspension due to waves. Journal of GeophysicalResearch 108 (C6), 3173, 4.1–4.7.
Vittori, G., Blondeaux, P., 2008. Turbulent boundary layer under a solitary wave.Journal of Fluid Mechanics 615, 433–443.
Vittori, G., Blondeaux, P., 2011. Characteristics of the boundary layer at the bottomof a solitary wave. Coastal Engineering 58 (2), 206–213.
Vittori, G., Verzicco, R., 1998. Direct simulation of transition in an oscillatoryboundary layer. Journal of Fluid Mechanics 371, 207–232.
Wang, B., Redekopp, L.G., 2001. Long internal waves in shear flows: topographicresonance and wave-induced global instability. Dynamics of Atmospheres andOceans 333, 263–302.
Zyserman, J.A., Fredsoe, J., 1994. Data analysis of bed concentration of suspendedsediment. Hydraulic Engineering 120 (9), 1021–1042.