Embed Size (px)
Citation preview
Modeling and computing con-strained dynamical systems—atime-varying system consisting ofbodies connected by joints that can
be represented by constraint equations—involvesmodeling real-world problems and constructingdifferential algebraic equations and numerical in-tegration. The purpose is to obtain generalizedcoordinates, their time derivatives, and bodyforces for dynamic analysis and simulation.
Researchers have developed general ap-proaches and software packages for multibodykinematic and dynamic analysis,1–4 yet specificexamination of systems from first principles offerdiffering perspectives of old and new problemsand reveal features that might have initiallypassed unnoticed. For example, an incompati-bility between physical modeling and numericalmethods might lead to inaccurate conclusionsabout system design.
Authors such as Edward Haug,5 ParvizNikravesh,2 and Ahmed Shabana3,4 have substan-
tially pursued planar and spatial multibody mod-eling and constrained variational dynamics. Themultibody system equations that result from themodeling are in fact differential-algebraic equa-tions (DAEs), because the system equations areaugmented with algebraic constraints that definethe connectivity of the system’s components. (Forinformation about additional DAE research, seethe sidebar.) In this article, we use our own pla-nar and spatial constrained variational systemsoftware, Multibody System,6–8 to compute off-highway vehicle dynamics, crash simulations, andplanetary ephemerides and to record the integra-tion method’s accuracy.
Studying force modeling in multibody systems byinvestigating progressively smoother body interac-tion forces should encourage scientists and engi-neers to develop new methods to detect numericalproblems in system computation. These methodsmight involve replacing the forces, in part with theequivalent constraint equations, or using stiffnessdetection techniques to employ further physicalmodeling near the time interval concerned.
Multibody system equations
The following derivation follows the work ofShabana and shows how we can formulate thegeneral equations of dynamic equilibrium for
28 COMPUTING IN SCIENCE & ENGINEERING
THE COMPUTATION OFCONSTRAINED DYNAMICAL SYSTEMS:MATCHING PHYSICAL MODELINGWITH NUMERICAL METHODS
Researchers have investigated modeling and computation of constrained dynamical systems,but scientists and engineers sometimes overlook consistent matching of mathematicalmodeling and numerical methods. The authors use multibody system software to study off-highway vehicles, automobile and android crash simulation, and planetary ephemerides.
F E A T U R E A R T I C L E
BUD FOX, LESLIE JENNINGS, AND ALBERT Y. ZOMAYA
University of Western Australia
1521-9615/01/$10.00 © 2001 IEEE

JANUARY/FEBRUARY 2001 29
multibody systems using generalized Cartesiancoordinates and the virtual work principle.4 Thisprinciple states that the virtual work due to theinertia forces is equal to the sum of the virtualwork due to the externally applied forces andconstraint forces. That is,
δWI,i = δWe,i + δWc,i. (1)
The virtual work of the externally appliedforces acting on the rigid body i is
(2)
where Qe,i is the vector of generalized externallyapplied forces corresponding to the vector ofgeneralized planar coordinates,
δ δWe i e iT
i, ,= Q q
Related workMultibody system equations are in fact differen-
tial-algebraic equations (DAEs), because the sys-tem equations are augmented with algebraic con-straints defining the connectivity of the system’scomponents. Bernd Simeon and his colleagues1
provide a summary of the theory, computation,and applications of DAEs.
Kathryn Brenan and her colleagues introducethe basic types of DAEs, constrained variationalproblems, the theory, solvability and indexconcept, linear and nonlinear systems, numericalmethods, algorithms, applications and DAE exam-ples.2 Uri Ascher and Linda Petzold have carefullyorganized the study of ODEs and DAEs andpresent methods for their computation.3
Ahmed Shabana has studied track vehicledynamics,4–7 his work pursuing a differentmethod of dynamic equations computation. Theinvestigation of constraint compliance reveals thedifficulty encountered in numerical computationof the track vehicle equations. Contact force mod-eling rather than the differentiation of theconstraint equations appears to be the cause ofcomputational difficulty, and new methods andalgorithms might be required to detect numericalproblems in advance, to facilitate integration. (Forfurther details of track vehicle dynamics see thearticle by Bud Fox and his colleagues.8)
We have also investigated automobile crashsimulation involving two planar androidmultibody system models. The first is a simplifiedandroid system, and the second is a 46-body-partandroid muscle-skeletal and vertebral system. Thesoft android tissue contacts result in smoothercontact force models and, hence, are easier tocompute. For further details of automobile andandroid modeling and computation, see the arti-cle by Fox and his colleagues.9
Planetary ephemerides computed by JPL areavailable in the Astronomical Almanac.10 We inves-
tigated the numerical accuracy of integratingsmooth astrophysical systems by computing themotion of an artificial satellite and ephemerides ofthe planets of the solar system. For further detailsof astrophysical systems see the article by Fox andhis colleagues.11
References1. B. Simeon, C. Fuhrer, and R. Rentrop, “Differential-Algebraic
Equations in Vehicle System Dynamics,” Surveys on Mathe-matics for Industry, 1991, pp. 1–37.
2. K.E. Brenan, S.L. Campbell, and L.R. Petzold, Numerical Solu-tion of Initial-Value Problems in Differential-Algebraic Equations,Elsevier Science, New York, 1989.
3. U.M. Ascher and L.R. Petzold, Computer Methods for OrdinaryDifferential Equations and Differential-Algebraic Equations,SIAM, Philadelphia, Penn., 1998.
4. T. Nakanishi and A.A. Shabana, “Contact Forces in the Non-linear Dynamic Analysis of Tracked Vehicles,” Int’l J. Numeri-cal Computing Methods in Eng., Vol. 37, 1994, pp.1251–1275.
5. T. Nakanishi and A.A. Shabana, “On the Numerical Solutionof Tracked Vehicle Dynamic Equations,” Nonlinear Dynam-ics, Vol. 6, No. 6, Dec. 1994, pp. 391–417.
6. M.K. Sarwar, T. Nakanishi, and A.A. Shabana, “Chain LinkDeformation in the Nonlinear Dynamics of Tracked Vehicles,”J. Vibration and Control, Vol. 1, No. 2, May 1995, pp.201–224.
7. A.A. Shabana, Computational Dynamics, John Wiley & Sons,New York, 1994.
8. B. Fox, L.S. Jennings, and A.Y. Zomaya, “Numerical Compu-tation of Differential Algebraic Equations for Non-linear Dy-namics of Multibody Systems involving Contact Forces,” tobe published in ASME J. Mechanical Design, 2000.
9. B. Fox, L.S. Jennings, and A.Y. Zomaya, “Numerical Compu-tation of Differential-Algebraic Equations for Non-linear Dy-namics of Multibody Android Systems in Automobile CrashSimulation,” IEEE Trans. Biomedical Engineering, Vol. 46, No.10, 1999, pp. 1199–1206.
10. The 1998 Astronomical Almanac, US Government Printing Of-fice, Washington, DC, 1997.
11. B. Fox, L.S. Jennings, and A.Y. Zomaya, “Numerical Compu-tation of Differential Algebraic Equations for the Approxima-tion of Artificial Satellite Trajectories and PlanetaryEphemerides,” ASME J. Applied Mechanics, Vol. 67, No. 3,Sept. 2000, pp. 574–580.

30 COMPUTING IN SCIENCE & ENGINEERING
qi = [Rx,i, Ry,i, θi]T. (3)
The virtual work of the joint constraint forcesacting on the rigid body is
(4)
where Qc,i is the vector of generalized constraintforces corresponding to the generalized coordi-nates qi. Finally, the virtual work due to the in-ertia forces is given as
(5)
where ρi and Vi are the density and volume ofbody i, respectively. The position of an arbitrarypoint on the body i with respect to the global co-ordinate system is
(6)
(7)
and the rotation matrix of the body i with angleof rotation θi is
. (8)
We can express the virtual work of the inertiaforces of body i as
(9)
where Qv,i is the vector of centrifugal inertiaforces. By substituting Equations 2, 4, and 9 intoEquation 1, we obtain
(10)
We can show that the system equations are
(11)
which represents a system of 3NB equations in3NB + NC unknowns. NB is the total number ofbodies in the planar system, and NC is the totalnumber of independent constraint equations.Because there are more unknowns than equa-tions, the constraint equations are adjoined tothe system equations. We can write the con-straint equations denoting body connectivity as
C(q, t) = 0 (12)
and differentiating twice with respect to timegives
(13)
Augmenting Equation 11 with Equation 13,we obtain the complete system of 3NB + NCequations in 3NB + NC unknowns,
(14)
For spatial systems, Euler parameters
(15)
rather than Euler angles are used, resulting inthe generalized coordinates
(16)
We can show that the rotation matrix is
(17)
and the theoretical constraint equation for bodyi is
(18)
The kinetic energy of body i is
(19)
and we can show that
(20)
By substituting this expression into the La-grange equations of motion
(21)
we arrive at the equations of motion for body i,which are
d
dt
T Ti
i
i
iiT∂
∂
− ∂∂
=q q
Q
T mi i i i i i i= +12
12
˙ ˙ ˙ ˙ ., ,R m RRR Θ ΘΘΘ
T dVi i iT
i i
Vi
= ∫12
ρ ˙ ˙r r
Θ ΘiT
i − =1 0
A I V Vi i i ii= + +
sin ˜ ( ˜ ) sinθ θ
22
2 2
qi x y z iTR R R= [ ] . θ θ θ θ0 1 2 3
Θi iT= ( , , , )θ θ θ θ0 1 2 3
M CC
q QQ
qT
q
e
d0
=
˙λ
C q Q C q q C q Cq d q q qt˙ ( ˙) ˙ ˙ .= = − − −2 tt
Mq C Q˙ + =qT
eλ
[ ˙ ] ., , ,M q Q Q Q qi i v i e i c iT
i− − − =δ 0
δ δWI i i i v iT
i, ,[ ˙ ]= −M q Q q
Aii i
i i=
−
cos sinsin cos
θ θθ θ
⇒ = +˙ ˙ ˙r RA
ui ii
ii i
d
dθθ
r Aui i iRi= +
δ ρ δW dVI i i iT
i i
Vi
, ˙= ∫ r r
δ δWc i c iT
i, ,= Q q
JANUARY/FEBRUARY 2001 31
. (22)
Augmenting these equations with the con-straint equations yields the spatial augmentedsystem equations for body i
(23)
from which we can construct the complete sys-tem of equations, repeated here as
(24)
Differential algebraic equations
DAEs are differential equations augmented
with algebraic constraints. Linda Petzold andher colleagues have published material on thesolvability and computation of DAEs; their bookgives an introduction to DAEs and referencestherein concerning the earlier work on the the-ory and computation.9 Uri Ascher and Petzold5
present many important numerical methods forthe computation of ordinary differential equa-tions (ODEs) including initial-value problemsand boundary-value problems, and DAEs. ADAE might be of the form
(25)
The DAE of the multibody system consideredhere is of the form
(26)
where and . However, the matrix onthe left-hand side is singular. Differentiating thethird equation of the matrix–vector system givenby Equation 26, with respect to time twice,
˙ ˙v q=µ λ=
I
MCq
qq Q
C q
0 0
0
0 0 0
∂∂ µ
T
e
˙˙˙
,, t
= ( ) =( )
v f tv
F x, x( ˙ , )t = 0
M CC
q QQ
qT
q
e
d0
=
˙.λ
mm
R
QQ Q
RR,
,
,
, ,
˙˙
˙
i
i iT
i
i
i
i
e R
e
iT
i
v i
i
i
00
02
0 2 0
2
0
0
ΘΘ
Θ
ΘΘ
Θ
Θ Θ
[ ]
=−
+
λ
mm
R Q
Q G IRRR i
i
i
i iT
i i
i
i
,
, ,
˙˙ ˙
00
02ΘΘ Θ ΘΘΘ
=
+ −
ω
Body i
Surface body j
Global coordinate system
Xi
θi
Yi
r
Yj
Xj
X
Rj
rpj
rpi
rpi j
pj
pi
Y
upi
upj
Ri
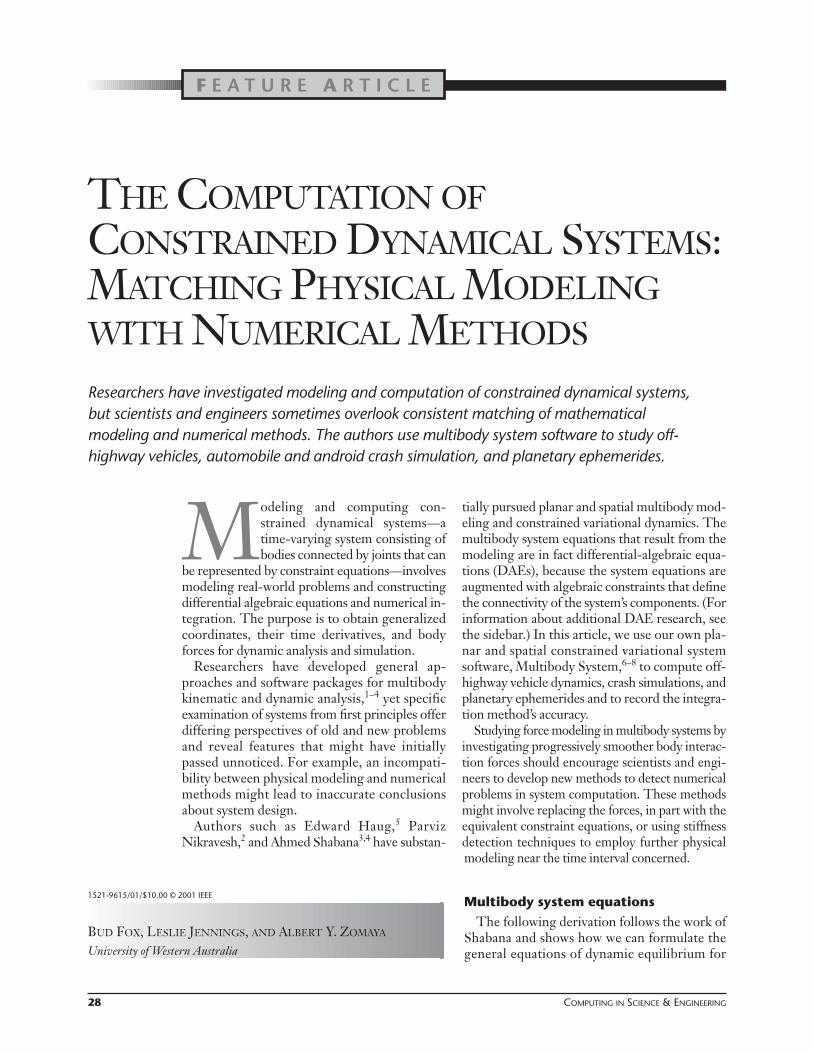
Figure 1. Body surface contact geometry indicating vector information required to complete the body’sspring-damper contact force model.
32 COMPUTING IN SCIENCE & ENGINEERING
yields
(27)
which has a nonsingular leading matrix provid-ing ∂C/∂q is of full rank for all time. The fol-lowing definition classifies a DAE with respectto differentiation of the system equations givenby Equation 25.
The minimum number of times that all or partof the DAE must be differentiatedwith respect to t to determine as a continu-ous function of x and t, for t in some interval, isthe index of the DAE.9
The original system has been differentiatedtwice, and the substitution of can be con-sidered as an additional differentiation. This re-sults in the ODE in Equation 27 and hence theoriginal system Equation 26 is a DAE of indexthree. Note that here
is computed by the ODE software. To find λ,µ(t) must be differentiated—this is, an unstableprocess. Ascher and Petzold10 and Kathryn Bre-nan and her colleagues9 discuss the computa-
tional and numerical difficulties that can arise asa result of differentiating the constraint equa-tions. The constraint equations might not be sat-isfied as the integration progresses, and they donot recommend excessive differentiation of theconstraints.
Multibody models and contact forces
Investigating simple models reveals dynami-cal information useful for modeling larger sys-tems. Figure 1 represents a body-surface contactmodel. We can observe oscillatory motionthrough this form of contact and change thespring and damping coefficients to simulate dif-fering material compounds. The model employsa spring-damper element between points pi andpj, the former residing on the most penetratedpart of the body and the latter on the surface.The magnitude of this force is
(28)
where k and c are the spring and damping coef-ficients, respectively, and
δij = Ry,i – Ry,j – r. (29)
Shabana4 states that the virtual work due to aforce with magnitude is
(30)
δ∂∂
∂∂
δδ
δ δ
W Fcp
p
p
i
p
j
i
j
iT
i jT
j
ij
ij
ij
ij ij=
= +
r
r
r
q
r
q
Q q Q q
Fcij
Fc ij ijijk c= +δ δ
µ λ τ τt dt
( ) = ( )∫0
µ λ=
xF x, x, t 0˙( ) =
I
MCq
Cq
qf q,q q
0 0
0
0 0
∂∂
∂∂
µ
= ( ) = ( )T
v t v t ˙˙˙
˙, , , ,f
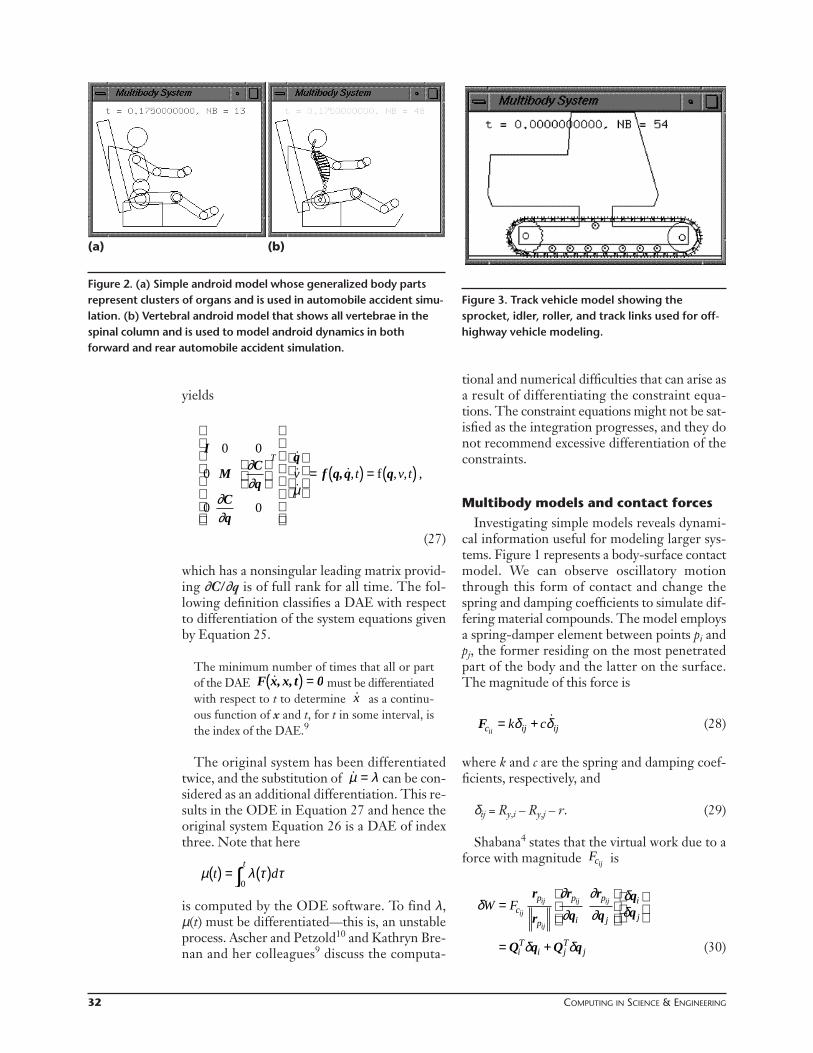
Figure 3. Track vehicle model showing thesprocket, idler, roller, and track links used for off-highway vehicle modeling.
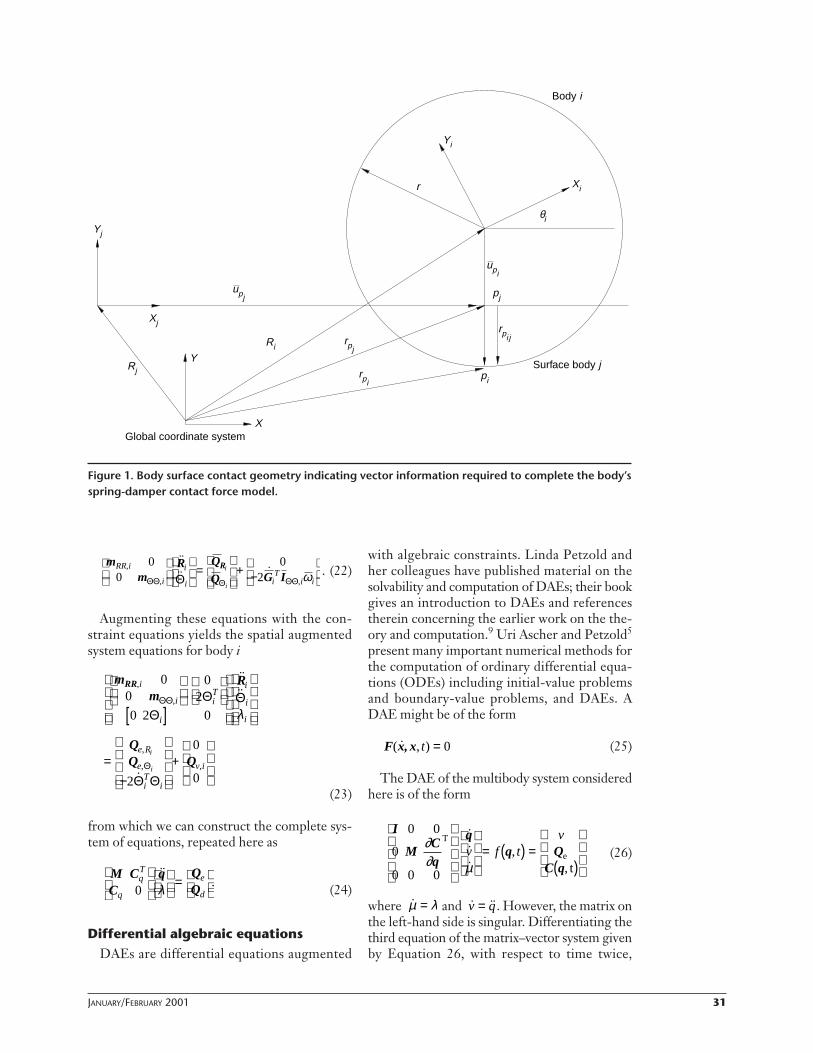
Figure 2. (a) Simple android model whose generalized body partsrepresent clusters of organs and is used in automobile accident simu-lation. (b) Vertebral android model that shows all vertebrae in thespinal column and is used to model android dynamics in bothforward and rear automobile accident simulation.
(a) (b)
JANUARY/FEBRUARY 2001 33
where
(31a)
and
(31b)
The position vector written in the global co-ordinate system is
(32)
where
(33a)
and
. (33b)
We can use other contact models such as theprogressive pseudo-damping contact force7
(34)
to model other physical systems such as those inFigure 2.
Track vehicle modeling (see Figure 3) uses thecontact force models we showed earlier, andchanging the spring and damping coefficients tosimulate soft body contacts can approximate thebehavior of harder bodies. Employing special-ized constraints in the contact region can allevi-ate numerical computation dealing with “stiffersystems.”
Results
Off-highway vehicle dynamics, crash simula-tion, and astrophysical modeling all involvesparse systems of equations and require Gaussianelimination to be performed at each time step inthe computation and integration. Spatial systemsmay require Euler parameters as their orienta-tion variables rather than Euler angles, becauseaccording to Shabana,3 the body-rotation matrixmight not be well defined for certain body ori-entations. Also, for certain values of time and an-gular velocity ω, the submatrix mθθ,i may be sin-gular and hence the mass matrix Mi alone maybe singular, although the leading coefficient ma-trix is still nonsingular. The following matrix in-
F k cc ij ij ijij= +δ δ δ
upi x j x
j
R R= −
, ,
0
up
i
i
i
r
r=
−
−
cos
sin
32
32
π θ
π θ
r r r R A u R A up p p i i p j j pij i j i j= − = + − −
QQQ
Iu A
r
rj
R j
jc
pT
jT
p
pij
j
ij
ij
=
= −
,
, ,θ θF
QQQ
Iu A
r
ri
R i
ic
pT
iT
p
pij
i
ij
ij
=
=
,
, ,θ θF
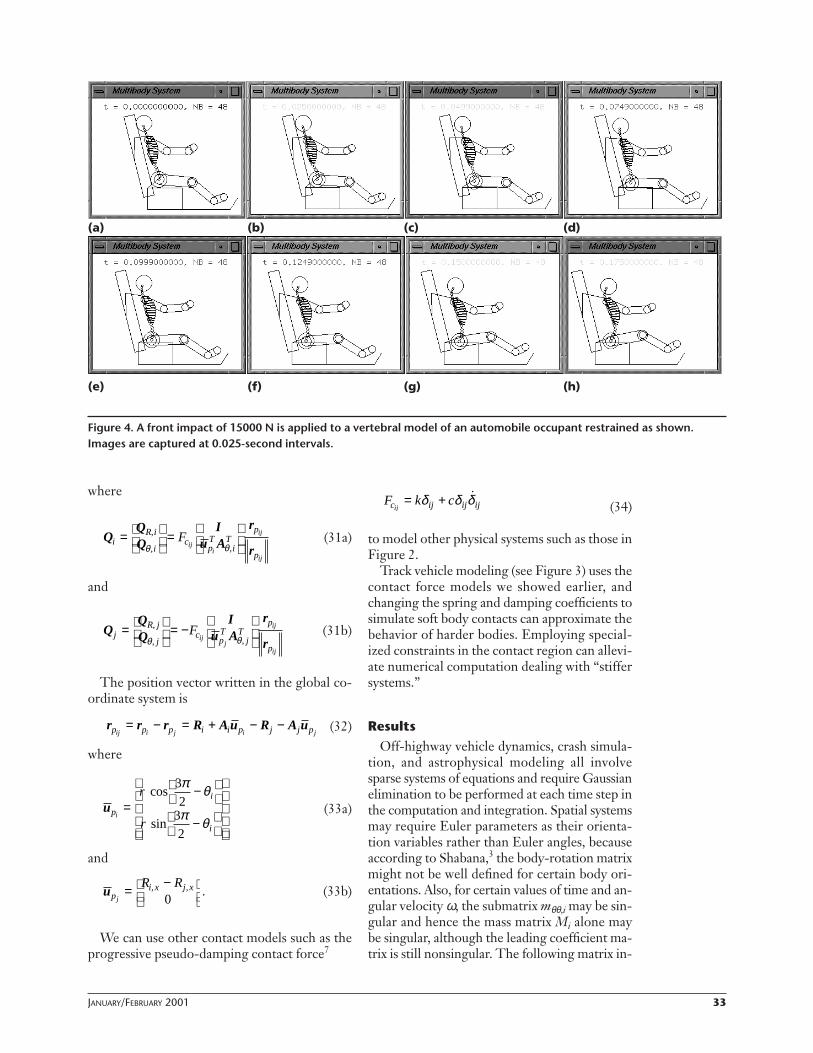
Figure 4. A front impact of 15000 N is applied to a vertebral model of an automobile occupant restrained as shown.Images are captured at 0.025-second intervals.
(a) (b) (c) (d)
(e) (f) (g) (h)

34 COMPUTING IN SCIENCE & ENGINEERING
version technique for the computation of thesystem equations should not be used, because itrequires that the upper left block A be invertible(for all time steps).
(35)
where ∆ = D – CA–1B, E = A–1B, and F = CA–1.We should also be aware that there are four
Euler parameters—that is, four angular gener-alized coordinates per body. There should be no
more angular constraintequations per body than thereare angular coordinates perbody to avoid a dimensionallyinconsistent system of equa-tions.
Figure 4 shows a typicalsimulation slide-set of amultibody system. We canvisibly detect the fluidity ofmotion and perform the fol-lowing constraint compliancetest to determine the accuracyof the results; h is the time-step size used in the integra-tion scheme, and C(q,t) are
the constraint equations:
. (36)
The track vehicle dynamics study involvingcontact forces explores integration of the systemequations using different integration schemes.Studying constraint compliance reveals thatnonlinear, nondifferentiable contact forces ofhigh magnitude (arising from the body-interac-tion modeling method) present numerical diffi-culties for software that expects almost analyti-cally smooth data. The twice-differentiatedconstraint equations might produce some nu-merical inaccuracy, but we regard the nondiffer-entiable contact force model as the numericalproblem’s real cause.
The automobile crash simulation involves nu-merically difficult computation due to the con-tact and constraint forces. The contact forcemodeling uses a progressive damping force,which is a function of both the body penetrationdistance and its time derivative (see Equation34), and is not differentiable everywhere in time.The simplified model largely predicts the bodydynamics behavior; however, a more involvedvertebral model reveals greater constituent
body-part detail, including the whiplash effecton the cervical vertebrae.7
The third system we investigated involves thespatial modeling of a planetary system using Eulerparameters. This system has data that is analyti-cally smooth, because there is no contact betweenany of the bodies. System equation integration iscommenced using available initial heliocentric rec-tangular equatorial generalized coordinates andtheir time derivatives and continues over a timeinterval to generate the planetary ephemerides andartificial satellite trajectories. We investigated con-straint compliance to establish the computation’saccuracy within a range of three to five significantfigures of the data provided by the AstronomicalAlmanac after simulation times of 200 and 360days. The constraint equations are the theoreticalconstraints introduced by the Euler parametermethod we described earlier.
Lessons learned
In multibody modeling involving writing codefor numerical computation of equations, re-searchers should pay careful attention to math-ematical modeling, numerical methods, andsoftware. We found that if the mathematicalmodeling and numerical methods are matchedin a way that caters to the dynamics of the prob-lem being studied, the resulting software devel-opment will provide a useful reusable tool forproblem investigation in the future.
Mathematical modelingCoordinate selection must be carefully made,
usually between generalized Cartesian coordi-nates and relative coordinates. Inevitably, thesparsity of the system equations obtained usingthe generalized coordinates is lost if we decideon the relative description; however, this leadsto a smaller set of equations we must solve. A de-cision between Euler angles and Euler parame-ters may be required; invertibility of system ma-trices should be investigated by those workingon the problem to prevent the inadvertent com-putation of a singular system.
A general multibody and computational dy-namics method might allow easier generaliza-tion of a system than a more specific or particu-lar approach, such as the Denavit–Hartenbergmethod commonly found in robotics work.
Researchers should carefully pursue forcemodeling with an emphasis on continuity anddifferentiability of the appropriate functions sothat the associated numerical methods of the cor-
C q C q, ,t h( ) − ( ) <0
A BC D
A E F EF
= + −−
− − − −
− −
1 1 1 1
1 1∆ ∆
∆ ∆
We used the virtual
work principle in
conjunction with the
augmentation
method to derive a set
of planar DAEs.

rect order are selected. Higher-order schemescan make use of the available higher-order deriv-atives and lead to more accurate computation.
Numerical methodsResearchers need to consider the stability of
the problem being computed and the stability ofthe numerical methods employed to computethe system of equations. The researcher shouldinvestigate the nature of the eigenvalues of theleading system matrix and define a stability con-stant to aid the discussion of the results. (See theAscher and Petzold book for more details.10)
The method’s efficiency might be at the pro-grammers’ discretion. If they use industrial soft-ware (for example, the Livermore Solver of Or-dinary Differential Equations [LSODAR] lineof integrators or the differential algebraic soft-ware Differential Algebraic Equations SystemSolver [DASSL]), then automatic methodswitching will match the appropriate method tothe nature of the problem.
The constraint compliance error in systemcomputation should be quoted. For example, inthe current work, the constraint compliancegiven by Equation 36 is made for each time step,and the computation is terminated should thisdifference be too large. In certain cases, re-searchers should investigate the local and globalerrors and note theorem 3.1 in the Ascher andPetzold book,10 which relates consistency, sta-bility, and convergence.
Requiring too little accuracy of LSODAR letsthe software skip over the regions where the datamight not be able to be integrated accurately.The resultant trajectories are then inaccurate,but the user does not know this. Asking for highaccuracy means that LSODAR “knows” when itcannot integrate over a region, so it stops withan indicated error condition. The user then doesnot have trajectories for the full time interval butknows that what has been computed is accurate.
SoftwareSoftware tools such as Maple, Mathematica,
and Matlab are common packages that we canuse alone or, in the case of Matlab, with the Cand Fortran programming languages. Thesetools might provide insight into the problem un-der investigation.
Project selection and evolution often centersaround the availability of quality and informa-tive software that is suitable for large, ongoingprojects. Here, we converted the DAE given byEquation 26 to the underlying ODE, Equation
27. We used LSODAR to numerically integratethe system. However, it might be more suitableto directly use DASSL and, in so doing, avoidthe time consuming analytic differentiation ofthe constraint equations.
Researchers should also carefully consider se-lecting the appropriate software for the existinghardware with a view to porting the resultingproject code to other platforms in advance.
Matching physical properties withnumerical methods when model-ing constrained dynamical systemslets scientists and engineers per-
form accurate analyses of system behavior. Weused the virtual work principle in conjunction withthe augmentation method to derive a set of planarDAEs. We derived the spatial system of DAEs bysubstituting an expression for body kinetic energyinto the Lagrange equations of motion. TheDAEs were cast as ODEs through differentiationof the constraint equations. Contact force model-ing and integration schemes must be carefullychosen and constraint compliance should be in-vestigated to record the computational accuracy.The difficulty of integrating over forces such asthese in the right-hand side of the ODE can onlybe resolved if we employ new contact models ornondifferentiability detection methods.
We used the numerical integrator LSODARto integrate ODEs, whereas DASSL directlycomputes DAEs. In this work, we differentiatedthe constraint equations to cast the DAE as theunderlying ODE. Brenan and her colleagues donot recommend this procedure.9 It might resultin reduced accuracy, but we have shown that thenature of the right-hand side, more so than thedifferentiated constraint equations, is the causeof numerical problems, especially in systems in-volving impacts.
References1. R.R. Ryan, “Adams—Multibody System Analysis Software,” Multi-
body Systems Handbook, Springer–Verlag, Berlin, 1990.
2. P.E. Nikravesh, Computer Aided Analysis of Mechanical Systems,Prentice-Hall, Upper Saddle River, N.J., 1988.
3. A.A. Shabana, Dynamics of Multibody Systems, John Wiley & Sons,New York, 1988.
4. A.A. Shabana, Computational Dynamics, John Wiley & Sons, NewYork, 1994.
5. E.J. Haug, Computer Aided Analysis and Optimization of Mechani-cal System Dynamics, NATO ASI Series, Vol. F9, Springer-Verlag,Berlin, 1984.
JANUARY/FEBRUARY 2001 35

COMPUTING IN SCIENCE & ENGINEERING
6. B. Fox, L.S. Jennings, and A.Y. Zomaya, “Numerical Computation of Differen-tial Algebraic Equations for Non-linear Dynamics of Multibody Systems involvingContact Forces,” to be published in ASME J. Mechanical Design, 2000.
7. B. Fox, L.S. Jennings, and A.Y. Zomaya, “Numerical Computation of Differen-tial-Algebraic Equations for Non-linear Dynamics of Multibody Android Systemsin Automobile Crash Simulation,” IEEE Trans. Biomedical Engineering, Vol. 46,No. 10, 1999, pp. 1199–1206.
8. B. Fox, L.S. Jennings, and A.Y. Zomaya, “Numerical Computation of Differen-tial Algebraic Equations for the Approximation of Artificial Satellite Trajectoriesand Planetary Ephemerides,” ASME J. Applied Mechanics, Vol. 67, No. 3, Sept.2000, pp. 574–580.
9. K.E. Brenan, S.L. Campbell, and L.R. Petzold, Numerical Solution of Initial-ValueProblems in Differential-Algebraic Equations, Elsevier Science, New York, 1989.
10. U.M. Ascher and L.R. Petzold, Computer Methods for Ordinary Differential Equa-tions and Differential-Algebraic Equations, SIAM, Philadelphia, Penn., 1998.
Bud Fox is a research associate in the Parallel Computing ResearchLaboratory in the Department of Electrical and Electronic Engineer-ing at the University of Western Australia. He received his BSc andPhD from the University of Western Australia. His research interestsare in multibody dynamics, computational science, and mathe-matical modeling. Contact him at the Parallel Computing ResearchLaboratory, Dept. of Electrical & Electronic Eng., Univ. of WesternAustralia, Nedlands, Perth Western Australia 6907; [email protected].
Leslie Jennings is an associate professor in the Department of Math-ematics at the University of Western Australia. Currently, he is work-ing on the interface of optimal control, numerical analysis, and soft-ware engineering. He received a BSc from the University ofAdelaide, Adelaide, South Australia and a PhD in numerical analysisfrom the Australian National University, Canberra, Australia. His re-search interests lie in numerical analysis and in the application ofoptimal control to human movement modeling, multibody sys-tems, chemical engineering, and filter design. Contact him at theDept. of Mathematics, Univ. of Western Australia, WA, 6907, Aus-tralia; [email protected].
Albert Y. Zomaya is a professor and Deputy-Head in the Depart-ment of Electrical and Electronic Engineering at the University ofWestern Australia, where he also leads the Parallel Computing Re-search Laboratory. He is an associate editor for the IEEE Transactionson Parallel and Distributed Systems and IEEE Transactions on Systems,Man, and Cybernetics. He is the founding editor-in-chief of the Wileybook series on Parallel and Distributed Computing. In September2000, he was awarded the IEEE Computer Society’s Meritorious Ser-vice Award. His research interests are in high-performance comput-ing, parallel and distributed algorithms, computational machinelearning, scientific computing, adaptive computing systems, mobilecomputing, data mining, cluster computing, megacomputing, andwireless networks. He received his PhD from the Department of Au-tomatic Control and Systems Engineering, Sheffield University,United Kingdom. Contact him at the Parallel Computing ResearchLaboratory, Dept. of Electrical and Electronic Eng., Univ. of WesternAustralia, Nedlands, Perth, Western Australia 6907; [email protected]; www.ee.uwa.edu.au/staff/zomaya.a.html.
I need an actuator!
(1) Go to Physics Today’s online Buyers’ Guide,the “Yellow Pages” for the physical sciences.www.physicstoday.org/guide
(2) Searchthe productindex for“actuator”
(3) View more than 2,000 potential suppliers
(4) Choose a company
(5) Contact the company by phone, fax, ore-mail . . . and get your stuff!
actuatorsAmerican Piezo Ceramics, Inc.Energen Inc.ETREMA Products, Inc.Industrial Devices Corp.Kerk Motion Products Inc.Newport Corp.OptoSigma Corp.
Newport Corp.P.O. Box 196071791 Deere Ave, Irvine CA 92606Tel: (949) 863-3144Toll free Tel: (800)-222-6440Fax: (949) 253-1680
Product Categoriesacoustic noise barriersactuatorsautocollimatorsball slides . . .
Scientists get the stuffthey need online @
www.physicstoday.org/guide
Averageis 13suppliersfor eachof 2,200productcategories!





























