Embed Size (px)
Citation preview

The Conveyor Belt
Materials Polystyrene ABS Extrusion Grade Nylon (extruded)
Modulus of Elasticity 3-3.5 * 109 n/m2 1.4-3.1 * 109 n/m2 2-4 * 109 n/m2
Coefficient of Friction (between
identical materials) 0.5 0.08-0.46 0.15-0.25
Density 1.05 g/cm^3 1.052 g/cm^3 1.135 g/cm^3
Properties
High impact strength, low cost,
easily extruded, injection mold-
ed, or compression molded.
Rigid low cost thermoplastic easily
machined and thermo-formed
Thermoplastic, impact re-
sistant, ideal for bearings and
gears, sometimes self lubricat-
ing
* the gears and belt shown in this image
are not the same as the components being
used.

COMPONENT 1: THE STAND
This component is used to hold the other components in place for the function of
the rube Goldberg device. They are multiuse and provide varied heights to be
used based on the users desires. Another feature on the device is that there are
holes on the top and bottom of the component so that it can be attached to a
base part for more stability. Due to the thickness of the part, the stand will be able
to stand on its own, however a base part will keep it from toppling over as the de-
vice is running. The stand will be made with ABS plastic.
ABS Plastic
ABS plastic is used in children’s toys with examples including Legos. This plastic
was chosen for the stand so that the shape would not deform easily and the holes
will be sturdy enough to act against the pulling forces in the conveyor belt system.
ABS plastic is also highly available, has low material cost, and can be easily pro-
cessed. Because ABS plastic is already used in children’s toys, it is clear that it will
be safe for use in schools as a kit for children. An added benefit of using this mate-
rial for children is that it is lightweight and due to a low melting temperature it can
be quickly manufactured with 3D printing or injection molding. The quick manu-
facturing time means that if the students do need replacement parts, or would like
to expand their kits, they can be made and sent within a short period of time.

FR DP A R R C
Stand
Must stand against
pulling forces from
motor
Tension and force
equations Resource 3
It could snap if
there is not enough
elasticity in the part.
Allow a moderately high
elasticity component.
Attach to base
Must have support to
keep it from falling
over
Slip fit parts Legos
Brackets
The pin could not
be long enough to
prevent tilting
Create additional support
systems that will act as
anchors going from the
stand to the base.
Multiuse Must be adaptable
for different designs
Legos
Chaos Tower
Tinker Toys
The adjoining parts
could not fit due to
tolerances
The kit will have spare
parts so that the odds are
one of them will fit
Withstand
Deformity
Must be structurally
sturdy
Tension equations
Modulus of Elasticity
Resources 1, 2, and 6
(Found on last page)
Impurities in the
material can cause
deformity to occur
even under the lim-
iting strength
Periodic testing of the
material being used and
ensuring it comes from a
reputable source will
lower this chance.
FRDPARRC

COMPONENT 2: THE GEAR
The gears are multifunctioning pieces. The red gear shown will be a
sliding fit part on to the pins. To hold the part in place, small rubber
bands will be provided that will create friction between the two parts.
This will allow the gear to rotate around the pins without sliding hori-
zontally. The gear teeth will be used in different configurations. One
configuration is to move the linkages in the conveyor belt system. An-
other is to move the linkages in the pulley module shown in previous
assignments. The gear shown in the top image will attach to the mo-
tor. The hub will attach the gear to the motor and the gear teeth will
use the motion provided by the motor to move the linkages. The
bottom gear will be used at the top of the conveyor belt system and
will be where the linkages turn around to go back towards the motor.
Both gears have a pitch diameter of 2 inches and will be made of Ny-
lon. These gears were pulled from resource 7.
Nylon
Nylon is typically used in gears. This plastic was chosen for the gears
so that the shape of the teeth would not deform easily. The features
will be sturdy enough to act against the pulling forces in system. Ny-
lon is highly available, is affordable, and can be easily processed. Ny-
lon is nontoxic and is durable to last through classroom use. An added
benefit of using this material for children is that it is lightweight and
due to a low melting temperature it can be quickly manufactured with
3D printing or injection molding.

FR DP A R R C
Withstand
linkage forc-
es
Must not deform
while linkages pull
on cylinder
Nylon elasticity Resource 2 and 3 The linkages dent
the cylinder
It is plastic, you can
remove the dent sim-
ilar to how you re-
move a dent from a
ping pong ball.
Act as gear
teeth
Gear teeth can not
deform with use Gear ratio equations Resource 4 The gears slip
Tighten the toleranc-
es between the gear
teeth and links
Be safe
enough for
use in a
child's toy
Shatter proof, easy
assembly, not hard
enough to cause
damage
Elasticity and density cal-
culations Resource 1 and 2
The teeth could
cause harm if too
sharp
Add rounds to the
edges of teeth to pre-
vent sharp edged
from causing dam-
age
FRDPARRC

COMPONENT 3: THE PIN
FR DP A R R C
Withstand
forces
Slip fit into the
stand parts while
being sturdy yet
easily removable
when finished
Fits and fasteners equa-
tons
The pins slip out
from the holes in
the stand
The holes need to be
lengthed so that
there is more surface
area between the
stand and the pin
Be safe
enough for
use in a
child's toy
Shatter proof, easy
assembly, not hard
enough to cause
damage
Elasticity and density cal-
culations Resource 1 and 2
The parts dent up-
on impact
Dents in ABS plastic
can sometimes be
removed, however
since this is easily
manufactured parts,
they can order re-
placement pieces.
The pin is used to hold components between or off of the stand
pieces. They will be sliding fit parts that can be easily placed and
removed by students but still have a sturdy enough connection
to stay in place while the machine is running.
ABS Plastic
This part will be made with ABS plastic. Because it is one solid
piece it can be extruded and cut into shape. The benefit with us-
ing ABS plastic is that it is rigid and is easily machined.
FRDPARRC
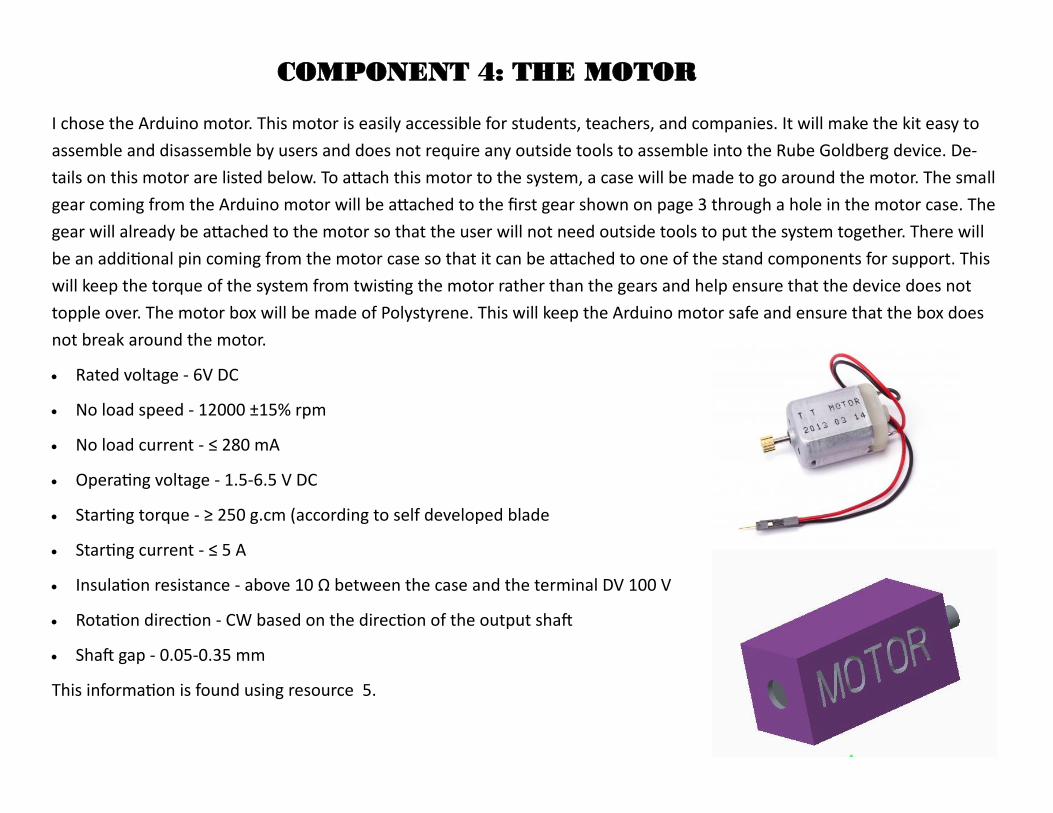
COMPONENT 4: THE MOTOR
I chose the Arduino motor. This motor is easily accessible for students, teachers, and companies. It will make the kit easy to
assemble and disassemble by users and does not require any outside tools to assemble into the Rube Goldberg device. De-
tails on this motor are listed below. To attach this motor to the system, a case will be made to go around the motor. The small
gear coming from the Arduino motor will be attached to the first gear shown on page 3 through a hole in the motor case. The
gear will already be attached to the motor so that the user will not need outside tools to put the system together. There will
be an additional pin coming from the motor case so that it can be attached to one of the stand components for support. This
will keep the torque of the system from twisting the motor rather than the gears and help ensure that the device does not
topple over. The motor box will be made of Polystyrene. This will keep the Arduino motor safe and ensure that the box does
not break around the motor.
Rated voltage - 6V DC
No load speed - 12000 ±15% rpm
No load current - ≤ 280 mA
Operating voltage - 1.5-6.5 V DC
Starting torque - ≥ 250 g.cm (according to self developed blade
Starting current - ≤ 5 A
Insulation resistance - above 10 Ω between the case and the terminal DV 100 V
Rotation direction - CW based on the direction of the output shaft
Shaft gap - 0.05-0.35 mm
This information is found using resource 5.

FR DP A R R C
Turn conveyor
belt
Must have enough
torque to activate
conveyor belt and
move linkages
T=(F1+F2)/2
F1=F2e^(mue*theta)
F1=P/(Ve^(mue*theta))
Motor and torque notes The motor pulls
the system over
Create an anchor
system
Turn conveyor
belt
Must be a pre-
made motor that
can be brought in
from another com-
pany
Resource 5
The outside man-
ufacturer does not
deliver parts on
time for shipment
Always have spare
motors in stock after
initial purchase
Turn conveyor
belt
Must attach to
stand pieces Sliding fit parts
May rotate motor
instead of gears
Tighten the space
between the motor
box pins and the
stand or lower the
gear teeth tolerances
FRDPARRC

COMPONENT 5: THE LINK
FR DP A R R C
Hold marble
Must hold marble as
the linkages move up
to the top gear
KE=1/2*M*V2
General forces equa-
tions
Sling shot The marbles fall
off
Raise the height so the
rubber band is held
higher up on the mar-
ble.
Multiple uses Must be able to have
varied lengths
Resources 1, 2, 3, 6, and
9
Links unsnap
apart easily
Change tolerance be-
tween the red pin and
the hooks
Stay locked
together Be a press fit part Press fit calculations Resource 3
The hooks do not
clip over the pin
Alter how the two sur-
faces interact
FRDPARRC
The two pieces at the top of the part are to keep the marbles from fall-
ing off the linkages as they carry them up the conveyor belt system. The
small pieces each have extra material protruding on the top to the
sides. This is so a rubber band can be wrapped around them and help
onto the parts to hold the marble. The red pin in the image will be press
fit into the two hook shaped parts. This will allow the link components
to stay together even though it will not be one solid piece of material.
Nylon
This component will be made with nylon. This was chosen so that there
was good elasticity in the material so that the hook end could be slight-
ly bent to fit width wise onto the bar end.

COMPONENT 6: THE BASE
This component will be used to secure the other components in the system.
The grey pins shown on the top of the part will slide into the holes on the
stand components. So the students can set up multiple configurations, the
pins have been placed so that the stands can either be standing straight up or
lay horizontally across the base. To lower the weight of the base, it has been
shelled out. To add more stability that was lost in shelling out the part, ribs
have been placed on the bottom of the feature. This will further prevent
breakage and deforming of the base as the device is used. The base will be
the maximum part size at 10inches x 4inches x 1 inch. Clipable features have
been added to the sides so that users can combine base pieces to extend the
stability and size of their machine.
Polystyrene
This component will be made with polystyrene. The purpose of using polysty-
rene is so that the base is less flexible than other features and will not de-
form as easily. Polystyrene is a strong, lightweight plastic and can be easily
injection molded.

FR DP A R R C
Provide sup-
port for an-
chors
Strong enough to
add counter torque
against motor
torque
Resources 1, 2, and 6 The material is too
brittle and snaps
Change the material
to ABS plastic or Ny-
lon
Does not de-
form
Will not deform or
stay bent from a
small amount of
pressure
Stress strain curve Resource 6
Solids notes
FRDPARRC

COMPONENT 7: THE MARBLE
The marbles being used in the conveyor belt system will be steel marbles
bought from an outside manufacturer. They will weigh 0.04 kg which is a
standard steel marble weight. Steel was chosen because this type of marble is
easily accessible, it is a safe material, and the marbles will be unlikely to break
when dropped from the conveyor belt if they miss their target.
FR DP A R R C
Do not break
Marble must be able
to withstand con-
sistent falls from var-
ied heights
Stress Strain curves Childhood experiences
Resources 1, 2, and 9
The marbles are
too small and are
easily lost
Choose a marble
that anyone can buy
from any standard
store.
Does not de-
form
Will not deform or stay
bent from a small
amount of pressure
Stress strain curve Solids notes
The marbles are
too hard and dent
the component they
fall onto
Make that compo-
nent out of a harder
material.

PROJECT REQUIREMENTS Press fit part
The bars of the links will be press fit into the links to hold them together as one solid piece.
Sliding fit
The pins will be sliding fit with the holes on the stand.
The pins on the base will be sliding fit with the holes on the stand.
The gears will be sliding fit with the pins.
The base will be sliding fit with other base pieces if the user decides to clip them together.
Motor
An Arduino motor is being incorporated into the module to act as a power source. It will be safely encased and rotate the
first gear in the system.
Mechanical Linkage
The link components
Both gear components
MATHEMATICS In homework 4, the basic mathematics behind each module was shown. Because I chose module one, I will continue with those formulas to show
why I made the material selections I did. I placed each equation into an excel spreadsheet and changed the variables until I found a design and ma-
terial that worked for the factor of safety I wanted to have.
The first equation used was to find the deflection in each bar on the links as they go around the conveyor belt.
Deflection = (W*L3)/(192*E*I)
The second equation used was to find the tension in each bar based off of the deflection.
Tension= (Deflection*A)/(F.S.)
The next three equations were used to find F1, F2, and torque of the system given that I knew the power and velocity of the system.
P=(F1-F2)V
F1+F2=2T
F1=F2eμθ
These of course where T=Torque, V=Velocity, P=Power, L=Length, W=Weight, E=Elasticity, I=Moment of Inertia, A=Area, F.S.=Factor of
Safety, μ=Coefficient of Friction, and θ=Angle

Because I chose the Arduino motor first, I knew my minimum torque was 250 g.cm. I chose a power of 2Kw, an angular ve-
locity (ω) of 12 rad/sec and a radius of 2inches. From this information I can find F1, F2, and Tension of the system.
V=ω*R=12*2=24
P=(F1+F2)*V
P/V=F1+F2
F1=F2eμθ
(P/V)=F2(eμθ+1)
F2=(P/V)/(eμθ
+1)
T=(F1+F2)/2
From the bold equations I can plug in various coefficients of friction to determine the tension in my system. This will help me choose my material
for the link and gear components. If we use the highest coefficient of friction for each material we get the following numbers.
Nylon T= 0.04166
Polystyrene T=0.0833
ABS Plastic T=0.1663
To allow the lowest amount of tension on each link, Nylon has been chosen as the material to be used for both the links and the gear pieces. To
make sure this amount of tension will not break using Nylon, the deflection will be calculated and then compared to the ultimate tensile strength of
nylon if it were to be in the pin shape designed.
For a clamped ended beam (or pin) the deflection equation is
(W*L3)/(192*E*I)
The calculated deflection of this part is 0.00982 cm
A factor of safety of 3 will be used for this part.

The ultimate tensile stress for Nylon, in this shape,
based on the stress strain curve to the left, is found
by the equation
UTS=Maximum load/Area of cross section
This gives us 1107 lb-ft
Because the tension in the system is much lower
than this, nylon will be fine to use as a material for
the links and the gears.
This diagram came from resource 8.

Resources
1. "Coefficient Of Friction Equation And Table Chart - Engineers Edge". Engineersedge.com. N.p., 2017. Web.
11 Apr. 2017.
2. "Modulus Of Elasticity Or Young's Modulus - And Tensile Modulus For Common Materi-
als". Engineeringtoolbox.com. N.p., 2017. Web. 12 Apr. 2017.
3. Oberg, Erik. Machinery's Handbook. 1st ed. New York: Industrial Press, 2000. Print.
4. "Plastic Gears - Custom Made Gears Or Order From Stock". Sdp-si.com. N.p., 2017. Web. 18 Apr. 2017.
5. "Purchase Small DC Motor". Studica.com. N.p., 2017. Web. 18 Apr. 2017.
6. Scott, Chris. "Polystyrene Information And Properties". Polymerprocessing.com. N.p., 2017. Web. 14 Apr.
2017.
7. "Small Mechanical Components: Precision Gears, Gear Assemblies, Timing Belts, Timing Belt Pulleys
And Couplings - SDP/SI". Sdp-si.com. N.p., 2017. Web. 18 Apr. 2017.
8. Stress Strain. Available at: https://www.saylor.org/site/wp-content/uploads/2012/09/ME1022.2.4.pdf. Ac-
cessed April 18, 2017.
9. Tower, The. "The Chaos Tower - Scientificsonline.Com". Scientificsonline.com. N.p., 2017. Web. 18 Apr.
2017.



















![1 SERIES Belt Conveyor System B090 - Bett Sistemi Srl€¦ · CONVEYOR BELT DEVELOPMENT CALCULATION FORMULA Conveyor belt length = 300 + {[(L-94)-(2• Conveyor belt thick. )]•2}](https://img.pdfslide.net/doc/110x75/5ad3c4047f8b9a48398b7ae4/1-series-belt-conveyor-system-b090-bett-sistemi-conveyor-belt-development-calculation.jpg)









