Embed Size (px)
Citation preview

The Internal World Models Needed to Perform Situation Estimation
Jim Eilbert
AP Technology6 Forrest Central Dr, Titusville, NJ 08560
1

Modeling a Phenomenon that Exercises a Large Portion of the Cognitive Machinery
• Consider cognitive processes relevant for a robot with sensory-driven behavior
• Basic requirement is a feedback loop, e g. OODA Loop widely used model of military decision making
2
Observe
Act Decide
Orient
World Expectation

Expanded OODA Loop Needed to Deal with Predictive Errors and Sensory Uncertainty
3
Hypothesize Alternate Situations
Uncertainestimate
Select Collection
Action
Appraise Collection
Plans
Plan Information Collection to Reduce
Uncertainty
Perception of Objects & Actions
ActContinue
High- Level Behavior
Situation Update
Collision avoidance
Appraise Future Situations vs.
Motives & Goals
Select Action
Situation Estimation
Project Feasible
Behaviors
Unexpectedobject or action
Recognize terminationcondition
Appraise Estimated Situation
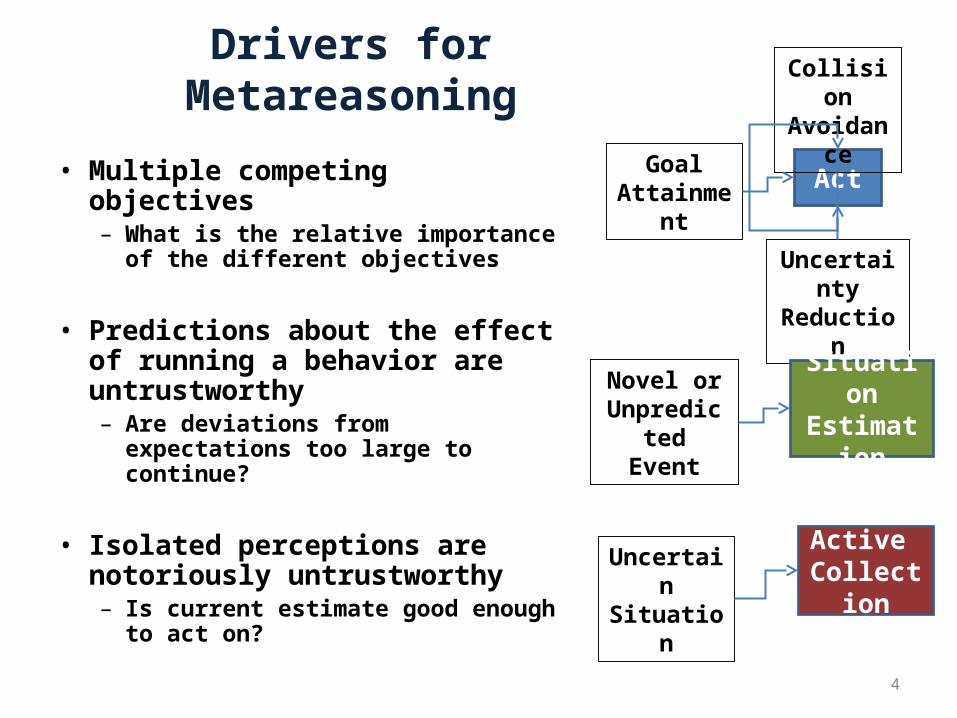
Drivers for Metareasoning
• Multiple competing objectives– What is the relative importance of
the different objectives
• Predictions about the effect of running a behavior are untrustworthy – Are deviations from expectations too
large to continue?
• Isolated perceptions are notoriously untrustworthy– Is current estimate good enough to
act on?
4
ActGoal Attainment
Collision Avoidance
Uncertainty Reduction
Situation Estimation
Novel or Unpredicted
Event
Active Collection
Uncertain Situation

Internal Models Used in the OODA Process
People store various types of relational information including -- Spatial, Functional, Episodic, Categories
Sensor Coordinates
Functional &Spatial ModelsFunctional &
Spatial ModelsFill in missinginformation
Object /Event Recognition
“Global” CoordinatesA reasoning frame containing the objects of current importance is
built on-the-fly
Episodic or High-level Behavior Models
Episodic or High-level Behavior Models
Run Behaviors in Reasoning
Frame
Project Feasible Behavior

Reasoning Frames for Doing Situation Estimation, Appraisal, & Action Selection
• “Mental spaces are very partial assemblies constructed as we think and talk, for purposes of local understanding and action.” (Fauconnier, Turner 2002).
6
PROPOSITIONA Mental Space is a region within the vast web of stored relational
data that contains the actors of current interest and the information needed to run and appraise their behaviors

Roseman’s Appraisal Model of Emotion
• Five secondary dimensions– Unexpectedness of the event– Agency: What or who caused the motive-relevant event?– Problem type: Is problem specific to the circumstance or intrinsic?– Control potential: Can something be done about an expected event?– Probability of the motive relevant event: Is outcome uncertain or
definite?
7
Getting what you want Getting what you don’t want
Not getting what you want Not getting what you don’t want
Motivational State
SituationalState

Emotions and Mental Space Switching
• Emotion could supply the jolt needed to overcome Mental Space hysteresis and cause a reset
EXAMPLES• Unexpectedness
– Surprise discrepancy between expectations & sensed information – Current Mental Space is switched to a new Mental Space constructed
around salient features causing the surprise. • Agent’s actions can cause a negative motive situation leading to
anger at the agent the agent’s character– The bad action can lead to a revised model of the agent’s character– Anger can cause a switch to a new Mental Space with the revised model
of the agent
8
Mental Space Switching is a new role for emotions.Previously suggested roles -- social communication and learning

9

Storing Complex Relational Information for Recognition and Behavior Projection
• Spatial memory or internal maps of 2D and 3D structure or (Allen 2004)
• Functional groupings, i.e. things that can be used for the same task– Saws, axes, and logs are all associated with getting firewood (Luria
1974)
• Episodic memory (Tulving 2001) captures causal sequences – Includes what, where and when information
• Ontologies and category hierarchies– Saws, axes, screwdrivers and can openers are all tools, although they
are unlikely to be used on the same task
10Relational information forms a vast, tightly coupled web

Inferring Information that Was Not Sensed Directly from Relational Information
• Each type of relational information allows different types of information to be inferred– Spatial memory presence and location of unseen objects
(Nissanov, et.al. 2002)– Functional groups activity in a video sequence from the presence
of objects in the same group (2007)– Narrative sequences predict future events based on the
occurrence of part a sequence (Eilbert, et.al. 2002)– Ontologies are used to determine legal substitutions in any of the
othe types of relational information• Cat’s make inferences using spatial memory and functions
groups, and may be able limited causal structure using their episodic-like memory
11

Evolutionary Drivers for Sophisticated REASONING
Reasoning Drivers
Many Behavioral
Choices
Task complexity, i.e.
number of decisions
Diversity of the world
12
• Reasoning is needed to select among behaviors • Simple predators (say frogs) perceive a world containing
– Large and small moving objects– Obstacles and open pathways
• Tool users must perceive a much richer world• Reasoning about how to do a task can be arbitrarily hard

Evolutionary Roots of Metacognition• Animal metacognition?
– A cat is stalking a mouse is oblivious to other objects• Has it decided that the risk of losing the mouse outweighs the safety risk in turning off its
normal monitoring?– Why don’t cats bother chasing squirrels into trees?
• Is there metareasoning going on that tells the cat that it is now in an environment that gives a big advantage to the squirrel, or
• Is giving up just a conditioned response?
• Experimental Evidence – Cats have internal world models:
• Spatial memory, independent of the current viewing direction, is also seen in reptiles and birds (Gallistel 1990)
• Episodic-like memory that allows ‘when’ information, as well as ‘what’ and ‘where’ to be remembered (Clayton, et.al. 1999)
• Dere, et.al. (2006) has found evidence of'metacognition', 'conscious recollection' of past events, and 'temporal order memory‘ in animals
– The learning curve during conditioning suggests that once a mammal “gets it,” they complete learning in just a few trials (Gallistel 2004).
13
![Florida Star. (Titusville, Florida) 1901-07-19 [p 8]. · 2017-12-14 · Titusville bieramily-brand Consumption superintendent Bgniur-ej TITUSVILLE stomach AVOIDED-Dont PRICES](https://img.pdfslide.net/doc/110x75/5f409124ad4c74754472e8fa/florida-star-titusville-florida-1901-07-19-p-8-2017-12-14-titusville-bieramily-brand.jpg)






















![Florida Star. (Titusville, Florida) 1901-06-07 [p 3]](https://img.pdfslide.net/doc/110x75/618a32d0a214f416a77d0d52/florida-star-titusville-florida-1901-06-07-p-3.jpg)




