Embed Size (px)
Citation preview

1
The Laplace Transform
Prof. Siripong Potisuk
Pierre Simon De Laplace
French Astronomer and Mathematician
1749 - 1827

2
Laplace Transform
An extension of the CT Fourier transform to
allow analysis of broader class of CT signals
and systems
Handle an important class of unstable
systems whose signals are not absolutely
integrable, i.e.,

3
Conditions for CTFT Existence
Applicable for aperiodic signal of finite and
infinite duration which satisfies:
dttx 2|)(| : Energy Finite)b(
Conditions set' Dirichl(a)
Bilateral Laplace Transform
Satisfy the condition of absolute integrability
by multiplying x(t) by a convergence factor
e-t for some value of
Combine the exponentials and let s = +j
})({})({)( ttjt etxCTFTtdeetxjX
4
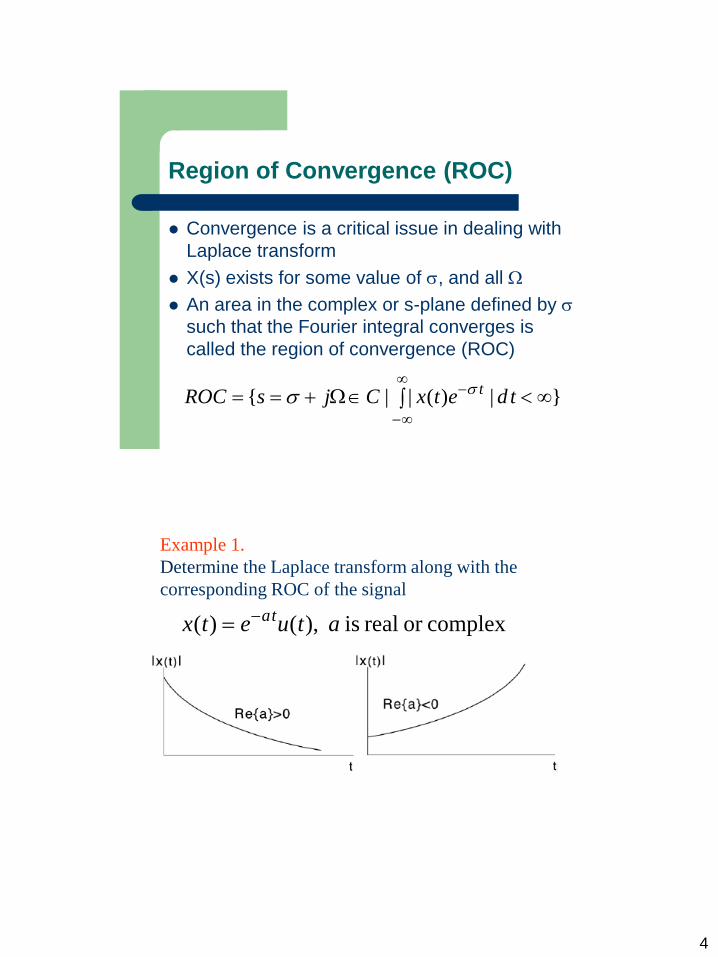
Region of Convergence (ROC)
Convergence is a critical issue in dealing with
Laplace transform
X(s) exists for some value of , and all
An area in the complex or s-plane defined by
such that the Fourier integral converges is
called the region of convergence (ROC)
}|)(||{
tdetxCjsROC t
Example 1.
Determine the Laplace transform along with the
corresponding ROC of the signal
complexor real is ),()( atuetx ta

5
Example 2.
Determine the Laplace transform along with the
corresponding ROC of the signal
complexor real is ),()( atuetx ta

6
Example 3.
Determine the Laplace transform along with the
corresponding ROC of the signals
tCetxa t ,)( )(
tetybtj,)( )( 0
Rational Laplace Transform
For most practical signals, the Laplace transform can be
expressed as a ratio of two polynomials
.polynomialr denominato theof
roots thei.e.,, of theare ,,, and
polynomialnumerator theof
roots thei.e.,, of theare ,,, where
)())((
)())((
)(
)()(
21
21
210
210
X(s)polesppp
X(s)zeroeszzz
pspspsa
zszszsb
sD
sNsX
N
M
N
M

7
Rational Laplace Transform
NNN
MMM
N
M
asas
bsbsb
pspsps
zszszsb
sD
sNsX
11
110
21
210
)())((
)())((
)(
)()(
It is customary to normalize the denominator polynomial
to make its leading coefficients one, i.e.,
Also, X(s) is a proper rational transform if
poles. of # zeroes of # i.e., , NM
The complex s-plane
s + j
(Re{s})
(Im{s})

8
The pole-zero plot of a rational Laplace transform in the s-plane.
Laplace Transform Properties
Parallel many of the CTFT properties, except
for the need to specify ROC
Linearity:
Time-shifting

9
Example 4.
Determine the Laplace transform along with the
corresponding ROC of the signal
2( ) 3 ( ) 2 ( )t tx t e u t e u t
Properties of the ROC

10

11

12
7) If X(s) is rational, its ROC is bounded by poles or extends
to infinity. Also, no poles of X(s) are contained in the ROC.
(a) x(t) right-sided ROC to the right of rightmost pole
(b) x(t) left-sided ROC to the left of leftmost pole
(c) x(t) two-sided ROC a strip between two poles
8) ROC of x(t) contains j-axis CTFT of x(t) exists

13
Inverse Laplace Transform
Transform back from the s-domain to the time
domain
Generally, computed by
For rational Laplace transform, expand in terms
of partial fractions and use table of transform
pairs and properties
From the previous example, the time-domain signal, x(t),
resulting from the inversion process for each ROC is

14
Example 5.
Determine the number of all possible signals that have
similar Laplace transform below but different ROCs.
)1)(3)(2(
1)(
2
ssss
ssX

15
Convolution Property
L
input of transformLaplace
output of transformLaplace
)(
)()(
sX
sYsH
Eigenfunctions of LTI Systems
An eigenfunction of a system is an input signal that,
when applied to a system, results in the output being
the scaled version of itself.
The scaling factor is known as the system’s eigenvalue.
Complex exponentials are eigenfunctions of LTI
systems, i.e., the response of an LTI system to a
complex exponential input is the same complex
exponential with only a change in amplitude.

16
H(s) = L{h(t)} = Laplace transform of impulse response
H(s) is called the system function or transfer function
Checking Causality of LTI Systems
A causal LTI system has a causal impulse
response (i.e., h(t) < 0 for t < 0)
ROC of transfer function for a causal system is a
RHP, but the converse is not true
However, a system with rational transfer function
is causal iff its ROC is the plane to the right of
the rightmost pole
Similar statements can be said about an anti-
causal system

17
Checking Stability of LTI Systems
A BIBO stable LTI system has an absolutely
integrable impulse response (i.e., CTFT of the
impulse response converges)
Consequently, an LTI system is BIBO stable iff
the ROC of its transfer function includes the
entire j-axis
In terms of poles, a causal system with rational
transfer function is BIBO stable iff all of the poles
lie in the LHP (i.e., all poles have negative real
parts)
ROC of transfer function for a causal system is a
RHP, but the converse is not true
However, a system with rational transfer function
is causal iff its ROC is the RHP to the right of the
rightmost pole
Similar statements can be said about an anti-
causal system
The Unilateral Laplace Transform
- The unilateral Laplace transform of a CT signal x(t)
is defined as
tdetxsX st
0
)()(
- Equivalent to the bilateral Laplace transform of x(t)u(t)
- Since x(t)u(t) is always a right-sided signal, ROC of
X(s) always includes the RHP
- Useful for solving LCCDEs with initial conditions




















