Embed Size (px)
Citation preview
The Mathematical Theory of Maxwell’s Equations
Andreas Kirsch and Frank HettlichDepartment of Mathematics
Karlsruhe Institute of Technology (KIT)Karlsruhe, Germany
c© October 23, 2012
2

Contents
1 Introduction 7
1.1 Maxwell’s Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2 The Constitutive Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.3 Special Cases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Boundary and Radiation Conditions . . . . . . . . . . . . . . . . . . . . . . 14
1.5 Vector Calculus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2 Expansion into Wave Functions 29
2.1 Separation in Spherical Coordinates . . . . . . . . . . . . . . . . . . . . . . . 29
2.2 Legendre Polynomials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.3 Spherical Harmonics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.4 The Boundary Value Problem for the Laplace Equation in a Ball . . . . . . . 54
2.5 Bessel Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.6 The Boundary Value Problems for the Helmholtz Equation for a Ball . . . . 64
2.7 Spherical Vector Harmonics . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
2.8 The Boundary Value Problems for Maxwell’s Equations for a Ball . . . . . . 73
Bibliography 75
3
4 CONTENTS

Preface
This book arose from a lecture on Maxwell’s equations given by the authors between ?? and2009.
The emphasis is put on three topics which are clearly structured into Chapters 2, ??, and??. In each of these chapters we study first the simpler scalar case where we replace theMaxwell system by the scalar Helmholtz equation. Then we investigate the time harmonicMaxwell’s equations.
In Chapter 1 we start from the (time dependent) Maxwell system in integral form and derive...
5

6 CONTENTS
Chapter 1
Introduction
1.1 Maxwell’s Equations
Electromagnetic wave propagation is described by particular equations relating five vectorfields E , D, H, B, J and the scalar field ρ, where E and D denote the electric field(in V/m) and electric displacement (in As/m2) respectively, while H and B denote themagnetic field (in A/m) and magnetic flux density (in V s/m2 = T =Tesla). Likewise,J and ρ denote the current density (in A/m2) and charge density (in As/m3) of themedium. Here and throughout the lecture we use the rationalized MKS-system, i.e. V ,A, m and s. All fields will be assumed to depend both on the space variable x ∈ R
3 and onthe time variable t ∈ R.
The actual equations that govern the behavior of the electromagnetic field, first completelyformulated by Maxwell, may be expressed easily in integral form. Such a formulation has theadvantage of being closely connected to the physical situation. The more familiar differentialform of Maxwell’s equations can be derived very easily from the integral relations as we willsee below.
In order to write these integral relations, we begin by letting S be a connected smooth surfacewith boundary ∂S in the interior of a region Ω0 where electromagnetic waves propagate. Inparticular, we require that the unit normal vector ν(x) for x ∈ S be continuous and directedalways into “one side” of S, which we call the positive side of S. By τ(x) we denote the unitvector tangent to the boundary of S at x ∈ ∂S. This vector, lying in the tangent plane of Stogether with a vector n(x), x ∈ ∂S, normal to ∂S is oriented so as to form a mathematicallypositive system (i.e. τ is directed counterclockwise when we sit on the positive side of S, andn(x) is directed to the outside of S). Furthermore, let Ω ∈ R
3 be an open set with boundary∂Ω and outer unit normal vector ν(x) at x ∈ ∂Ω. Then Maxwell’s equations in integral form
7

8 CHAPTER 1. INTRODUCTION
state:
∫
∂S
H · τ dℓ =d
dt
∫
S
D · ν ds +
∫
S
J · ν ds (Ampere’s Law) (1.1a)
∫
∂S
E · τ dℓ = − d
dt
∫
S
B · ν ds (Law of Induction) (1.1b)
∫
∂Ω
D · ν ds =
∫∫
Ω
ρ dx (Gauss’ Electric Law) (1.1c)
∫
∂Ω
B · ν ds = 0 (Gauss’ Magnetic Law) (1.1d)
To derive the Maxwell’s equations in differential form we consider a region Ω0 where µ and εare constant (homogeneous medium) or at least continuous. In regions where the vectorfields are smooth functions we can apply the Stokes and Gauss theorems for surfaces S andsolids Ω lying completely in Ω0:
∫
S
curlF · ν ds =
∫
∂S
F · τ dℓ (Stokes), (1.2)
∫∫
Ω
div F dx =
∫
∂Ω
F · ν ds (Gauss), (1.3)
where F denotes one of the fields H, E , B or D. We recall the differential operators (incartesian coordinates):
div F(x) =3∑
j=1
∂Fj
∂xj
(x) (divergenz, “Divergenz”)
curlF(x) =
∂F3
∂x2
(x) − ∂F2
∂x3
(x)
∂F1
∂x3
(x) − ∂F3
∂x1
(x)
∂F2
∂x1
(x) − ∂F1
∂x2
(x)
(curl, “Rotation”) .
With these formulas we can eliminate the boundary integrals in (1.1a-1.1d). We then usethe fact that we can vary the surface S and the solid Ω in D arbitrarily. By equating theintegrands we are led to Maxwell’s equations in differential form so that Ampere’s Law,the Law of Induction and Gauss’ Electric and Magnetic Laws, respectively, become:

1.1. MAXWELL’S EQUATIONS 9
∂B
∂t+ curlx E = 0 (Faraday’s Law of Induction, “Induktionsgesetz”)
∂D
∂t− curlx H = −J (Ampere’s Law, “Durchflutungsgesetz”)
divx D = ρ (Gauss’ Electric Law, “Coulombsches Gesetz”)
divx B = 0 (Gauss’ Magnetic Law)
We note that the differential operators are always taken w.r.t. the spacial variable x (notw.r.t. time t!). Therefore, in the following we often drop the index x.
Physical remarks:
• The law of induction describes how a time-varying magnetic field effects the electricfield.
• Ampere’s Law describes the effect of the current (external and induced) on the mag-netic field.
• Gauss’ Electric Law describes the sources of the electric displacement.
• The forth law states that there are no magnetic currents.
• Maxwell’s equations imply the existence of electromagnetic waves (as ligh, X-rays, etc)in vacuum and explain many electromagnetic phenomena.
• Literature wrt physics: J.D. Jackson, Klassische Elektrodynamik, de Gruyter Verlag
Historical Remark:
• Dates: Andre Marie Ampere (1775–1836), Charles Augustin de Coulomb (1736–1806),Michael Faraday (1791–1867), James Clerk Maxwell (1831–1879)
• It was the ingeneous idea of Maxwell to modify Ampere’s Law which was known up tothat time in the form curl H = J for stationary currents. Furthermore, he collectedthe four equations as a consistent theory to describe the electromagnetic fields. (JamesClerk Maxwell, Treatise on Electricity and Magnetism, 1873).
Conclusion 1.1 Gauss’ Electric Law and Ampere’s Law imply the equation of continuity
∂ρ
∂t= div
∂D
∂t= div
(curl H − J
)= − div J
since div curl = 0.

10 CHAPTER 1. INTRODUCTION
1.2 The Constitutive Equations
In this general setting the equation are not yet consistent (more unknown than equations).The Constitutive Equations couple them:
D = D(E , H) and B = B(E , H)
The electric properties of material are complicated. In general, they not only depend on themolecular character but also on macroscopic quantities as density and temperature of thematerial. Also, there are time-dependent dependencies as, e.g., the hysteresis effect, i.e. thefields at time t depend also on the past.
As a first approximation one starts with representations of the form
D = E + 4πP and B = H − 4πM
where P denotes the electric polarisation vector and M the magnetization of the material.These can be interpreted as mean values of microscopic effects in the material. Analogously,ρ and J are macroskopic mean values of the free charge and current densities in the medium.
If we ignore ferro-electric and ferro-magnetic media and if the fields are small one can modelthe dependencies by linear equations of the form
D = εE and B = µH
with matrix-valued functions ε : R3 → R
3×3 (dielectric tensor), and µ : R3 → R
3×3
(permeability tensor). In this case we call the media inhomogenous and anisotropic.
The special case of an isotropic medium means that polarization and magnetisation donot depend on the directions. In this case they are just real valued functions, and we have
D = εE and B = µH
with functions ε, µ : R3 → R.
In the simplest case these functions ε and µ are constant. This is the case, e.g., in vacuum.
We indicated already that also ρ and J can depend on the material and the fields. Therefore,we need a further equation. In conducting media the electric field induces a current. In alinear approximation this is described by Ohm’s Law:
J = σE + Je
where Je is the external current density. For isotropic media the function σ : R3 → R is
called the conductivity.
Remark: If σ = 0 the the material is called dielectric. In vacuum we have σ = 0,ε = ε0 ≈ 8.854 · 10−12AS/V m, µ = µ0 = 4π · 10−7V s/Am. In anisotropic media, also thefunction σ is matrix valued.

1.3. SPECIAL CASES 11
1.3 Special Cases
Vacuum
In regions of vacuum with no charge distributions and (external) currents (i.e. (ρ = 0, Je =0) the law of induction takes the form
µ0∂H
∂t+ curl E = 0 .
Differentiation wrt time t and use of Ampere’s Law yields
µ0∂2H
∂t2+
1
ε0
curl curl H = 0 ,
i.e.
ε0µ0∂2H
∂t2+ curl curl H = 0 .
1/√
ε0µ0 has the dimension of velocity and is called the speed of light: c0 =√
ε0µ0.
From curl curl = ∇ div −∆ it follows that the components of H are solutions of the linearwave equation
c20
∂2H
∂t2− ∆H = 0 .
Analogously, one derives the same equation for the electric field:
c20
∂2E
∂t2− ∆E = 0 .
Remark: Heinrich Rudolf Hertz (1857–1894) showed also experimentally the existence ofelectromagenetic waves about 20 years after Maxwell’s paper (in Karlsruhe!).
Electrostatics
If E is in some region Ω constant wrt time t (i.e. in the static case) the law of inductionreduces to
curl E = 0 in Ω .
Therefore, if Ω is simply connected there exists a potential u : Ω → R with E = −∇u in Ω.Gauss’ Electric Law yields in homogeneous media the Poisson equation
ρ = div D = − div (ε0E) = −ε0∆u
for the potential u. The electrostatics is described by this basic elliptic partial differentialequation ∆u = −ρ/ε0. Mathematically, this is the subject of potential theory.

12 CHAPTER 1. INTRODUCTION
Magnetostatics
The same technique does not work in magnetostatics since, in general, curl H 6= 0. However,since
div B = 0
we conclude the existence of a vector potential A : R3 → R
3 with B = − curl A in D.Substituting this into Ampere’s Law yields (for homogeneous media Ω) after multiplicationwith µ0
−µ0J = curl curl A = ∇ div A − ∆A .
Since curl∇ = 0 we can add gradients ∇u to A without changing B. We will see later thatwe can choose u such that the resulting potential A satisfies div A = 0. This choice ofnormalization is called Coulomb gauge.
With this normalization we also get in the magnetostatic case the Poisson equation
∆A = −µ0J .
We note that in this case the Laplacian has to be taken component wise.
Time Harmonic Fields
Under the assumptions that the fields allow a Fourier transformation w.r.t. time we set
E(x; ω) = (FtE)(x; ω) =
∫
R
E(x, t) eiωt dt ,
H(x; ω) = (FtH)(x; ω) =
∫
R
H(x, t) eiωt dt ,
etc. We note that the fields E, H etc are now complex valued, i.e, E(·; ω), H(·; ω) : R3 → C
3
(and also the other fields). Although they are vector fields we denote them by capitalLatin letters only. Maxwell’s equations transform into (since Ft(u
′) = −iωFtu) the timeharmonic Maxwell’s equations
−iωB + curl E = 0 ,
iωD + curl H = σE + Je ,
div D = ρ ,
div B = 0 .
Remark: The time harmonic Maxwell’s equation can also be derived from the assumptionthat all fields behave periodically w.r.t. time with the same frequency ω. Then the formsE(x, t) = e−iωtE(x), H(x, t) = e−iωtH(x), etc satisfy the time harmonic Maxwell’s equations.

1.3. SPECIAL CASES 13
With the constitutive equations D = εE and B = µH we arrive at
−iωµH + curl E = 0 , (1.4a)
iωεE + curl H = σE + Je , (1.4b)
div (εE) = ρ , (1.4c)
div (µH) = 0 . (1.4d)
Eliminating H or E, respectively, from (1.4a) and (1.4b) yields
curl
(1
iωµcurl E
)
+ (iωε − σ) E = Je . (1.5)
and
curl
(1
iωε − σcurl H
)
+ iωµ H = curl
(1
iωε − σJe
)
, (1.6)
respectively. Usually, one writes these equations in a slightly different way by introducing theconstant values ε0 > 0 and µ0 > 0 in vacuum and relative values (dimensionless!) µr, εr ∈ R
and εc ∈ C, defined by
µr =µ
µ0
, εr =ε
ε0
, εc = εr + iσ
ωε0
.
Then equations (1.5) and (1.6) take the form
curl
(1
µr
curl E
)
− k2εc E = iωµ0Je , (1.7)
curl
(1
εc
curl H
)
− k2µr H = curl
(1
εc
Je
)
, (1.8)
with the wave number k = ω√
ε0µ0. In vacuum we have εc = 1, µr = 1 and thus
curl curl E − k2 E = iωµ0Je , (1.9)
curl curl H − k2 H = curl Je . (1.10)
Example 1.2 In the case Je = 0 and in vacuum the fields
E(x) = p eik d·x and H(x) = (p × d) eik d·x
are solutions of the time harmonic Maxwell’s equations (1.9), (1.10) provided d is a unitvector in R
3 and p ∈ C3 with p ·d = 01. Such fields are called plane time harmonic fields
with polarization vector p ∈ C3 and direction d.
1We set p · d =∑
3
j=1pjdj even for p ∈ C
3
14 CHAPTER 1. INTRODUCTION
We make the assumption εc = 1, µr = 1 for the rest of Section 1.3. Taking the divergence ofthese equations yield div H = 0 and k2 div E = −iωµ0 div Je, i.e. div E = −(i/ωε0) div Je.Comparing this to (1.4c) yields the time harmonic version of the equation of continuity
div Je = iωρ .
With the vector identity curl curl = −∆ + div ∇ equations (1.10) and (1.9) can be writtenas
∆E + k2 E = −iωµ0Je +1
ε0
∇ρ , (1.11)
∆H + k2 H = − curl Je . (1.12)
1.4 Boundary and Radiation Conditions
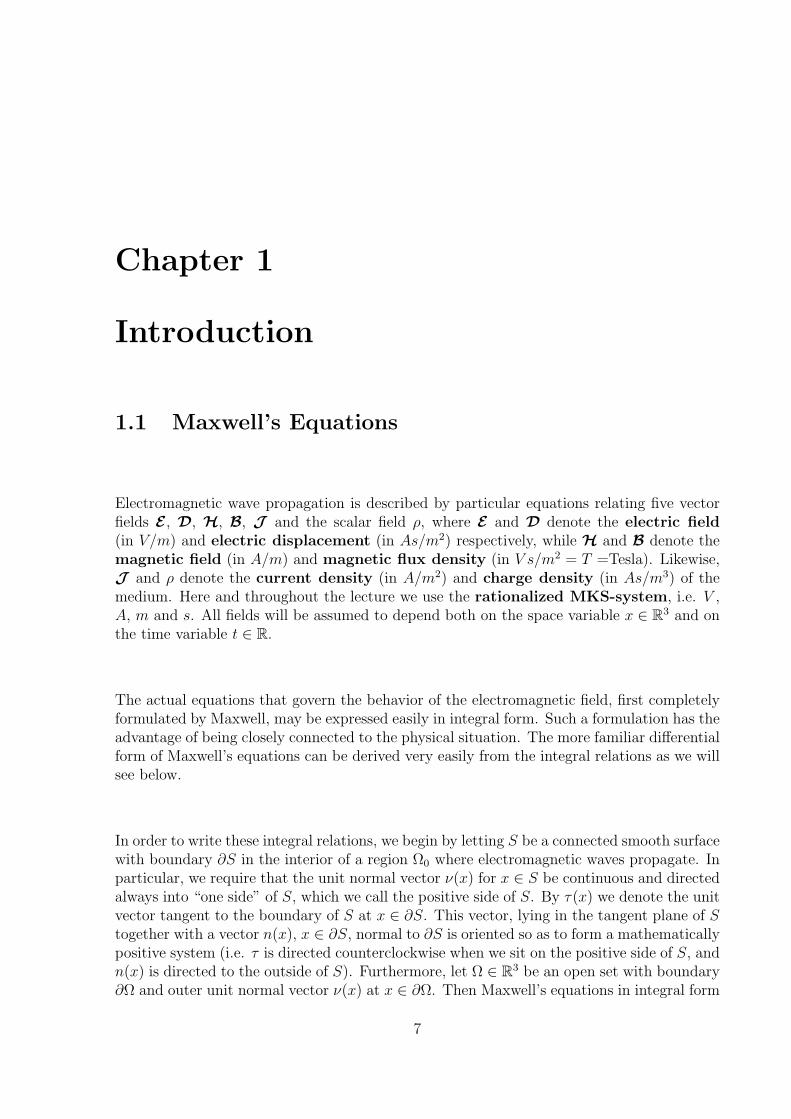
Maxwell’s equations hold only in regions with smooth parameter functions εr, µr and σ. If weconsider a situation in which a surface S separates two homogeneous media from each other,the constitutive parameters ε, µ and σ are no longer continuous but piecewise continuouswith finite jumps on S. While on both sides of S Maxwell’s equations (1.4a)–(1.4d) hold,the presence of these jumps implies that the fields satisfy certain conditions on the surface.
To derive the mathematical form of this behaviour (the boundary conditions) we apply thelaw of induction (1.1b) to a narrow rectangle-like surface R, containing the normal n to thesurface S and whose long sides C+ and C− are parallel to S and are on the opposite sides ofit, see the following figure.

1.4. BOUNDARY AND RADIATION CONDITIONS 15
When we let the height of the narrow sides, AA′ and BB′, approach zero then C+ and C−
approach a curve C on S, the surface integral ∂∂t
∫
RB · ν ds will vanish in the limit since the
field remains finite (note, that the normal ν is the normal to R lying in the tangential planeof S). Hence, the line integrals
∫
CE+ · τ dℓ and
∫
CE− · τ dℓ must be equal. Since the curve
C is arbitrary the integrands E+ · τ and E− · τ coincide on every arc C, i.e.
n × E+ − n × E− = 0 on S . (1.13)
A similar argument holds for the magnetic field in (1.1a) if the current distribution J =σE + Je remains finite. In this case, the same arguments lead to the boundary condition
n × H+ − n × H− = 0 on S . (1.14)
If, however, the external current distribution is a surface current, i.e. if Je is of the formJe(x + τn(x)) = Js(x)δ(τ) for small τ and x ∈ S and with tangential surface field Js and σis finite, then the surface integral
∫
RJe · ν ds will tend to
∫
CJs · ν dℓ, and so the boundary
condition is
n × H+ − n × H− = Js on S . (1.15)
We will call (1.13) and (1.14) or (1.15) the transmission boundary conditions.
A special and very important case is that of a perfectly conducting medium with bound-ary S. Such a medium is characterized by the fact that the electric field vanishes inside thismedium, and (1.13) reduces to
n × E = 0 on S (1.16)
Another important case is the impedance- or Leontovich boundary condition
n × H = λ n × (E × n) on S (1.17)
which, under appropriate conditions, may be used as an approximation of the transmissionconditions.
The same kind of boundary occur also in the time harmonic case (where we denote the fieldsby capital Latin letters).
Finally, we specify the boundary conditions to the E- and H-modes derived above. Weassume that the surface S is an infinite cylinder in x3−direction with constant cross section.Furthermore, we assume that the volume current density J vanishes near the boundary S andthat the surface current densities take the form Js = jsz for the E-mode and Js = js
(ν × z
)
for the H-mode. We use the notation [v] := v|+ − v|− for the jump of the function v at theboundary. Also, we abbreviate (only for this table) σ′ = σ − iωε. We list the boundaryconditions in the following table.

16 CHAPTER 1. INTRODUCTION
Boundary condition E-mode H-mode
transmission [u] = 0 on S ,[µ ∂u
∂ν
]= 0 on S ,
[σ′ ∂u
∂ν
]= −js on S , [u] = js on S ,
impedance λ k2u + σ′ ∂u∂ν
= −js on S , k2u − λ iωµ∂u∂ν
= js on S ,
perfect conductor u = 0 on S , ∂u∂ν
= 0 on S .
The situation is different for the normal components. We consider Gauss’ Electric andMagnetic Laws and choose Ω to be a box which is separated by S into two parts Ω1 and Ω2.We apply (1.1c) first to all of Ω and then to Ω1 and Ω2 separately. The addition of the lasttwo formulas and the comparison with the first yields that the normal component D · n hasto be continuous as well as (application of (1.1d)) B ·n. With the constitutive equations onegets
n · (εr,1E1 − εr,2E2) = 0 on S and n · (µr,1H1 − µr,2H2) = 0 on S .
Conclusion 1.3 The normal components of E and/or H are not continuous at interfaceswhere εc and/or µr have jumps.
The Silver-Muller radiation condition
Reference Problems
During our course we will consider two classical boundary value problems.
• (Cavity with an ideal conductor as boundary) Let D ⊆ R3 be a bounded domain
with sufficiently smooth boundary ∂D and exterior unit normal vector ν(x) at x ∈ ∂D.Let Je : D → C
3 be a vector field. Determine a solution (E,H) of the time harmonicMaxwell system
curl E − iωµH = 0 in D , (1.18a)
curl H + (iωε − σ)E = Je in D , (1.18b)
ν × E = 0 on ∂D . (1.18c)

1.4. BOUNDARY AND RADIATION CONDITIONS 17
D
εc, µr
ν × E = 0
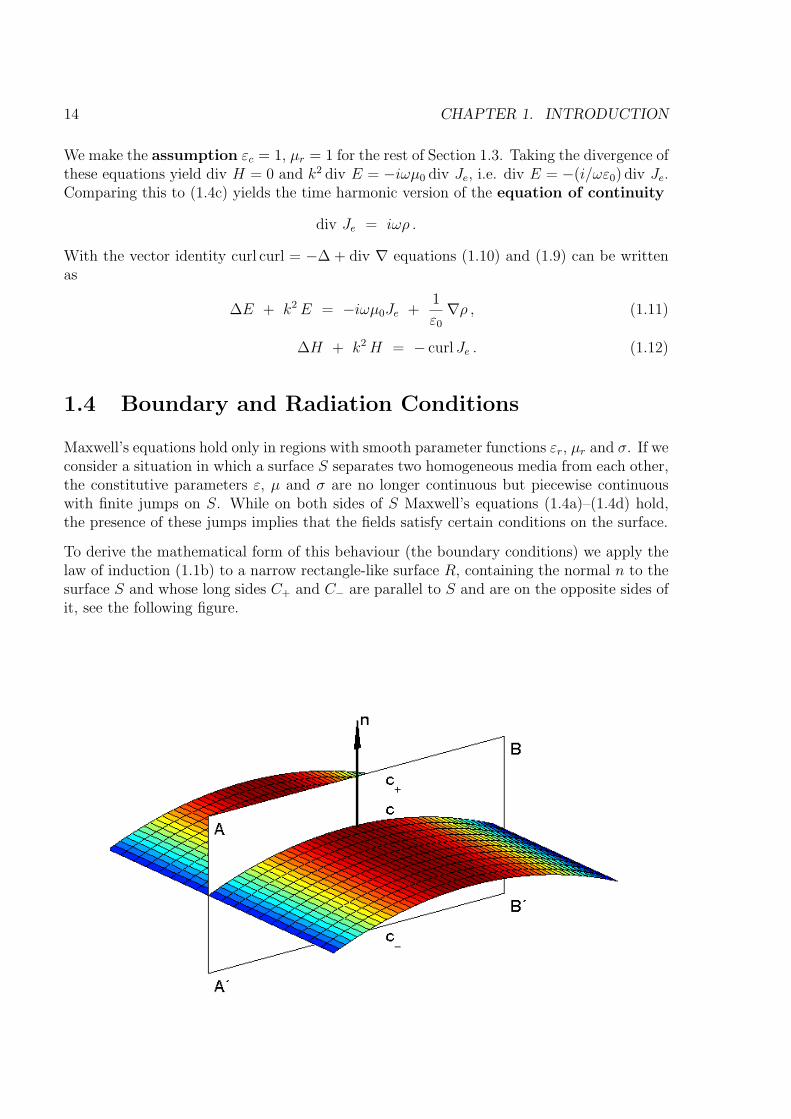
• (Scattering by an ideal conductor) Given a bounded region D and some solutionEi and H i of the “unperturbed” time harmonic Maxwell system
curl Ei − iµ0Hi = 0 in R
3 , curl H i + iε0Ei = 0 in R
3 ,
determine E,H of the Maxwell system
curl E − iµ0H = 0 in R3 \ D , curl H + iε0E = 0 in R
3 \ D ,
such that E satisfies the boundary condition ν ×E = 0 on ∂D, and E and H have thedecompositions into E = Es + Ei and H = Hs + H i in R
3 \ D with some scatteredfield Es, Hs which satisfy the Silver-Muller radiation condition
lim|x|→∞
|x|(
Hs(x) × x
|x| −√
ε0
µ0
Es(x)
)
= 0
lim|x|→∞
|x|(
Es(x) × x
|x| +
õ0
ε0
Hs(x)
)
= 0
uniformly with respect to all directions x/|x|.
Remark: For general µr, εc ∈ L∞(R3) we have to give a correct interpretation of thedifferential equations (“variational or weak formulation”) and transmission conditions(“trace theorems”).
18 CHAPTER 1. INTRODUCTION
D ν × E = 0
Ei, H i
AAAAAA
AA
AA
AA
HHHHHHj Es, Hs
1.5 Vector Calculus
In this subsection we collect the most important formulas from vector calculus.
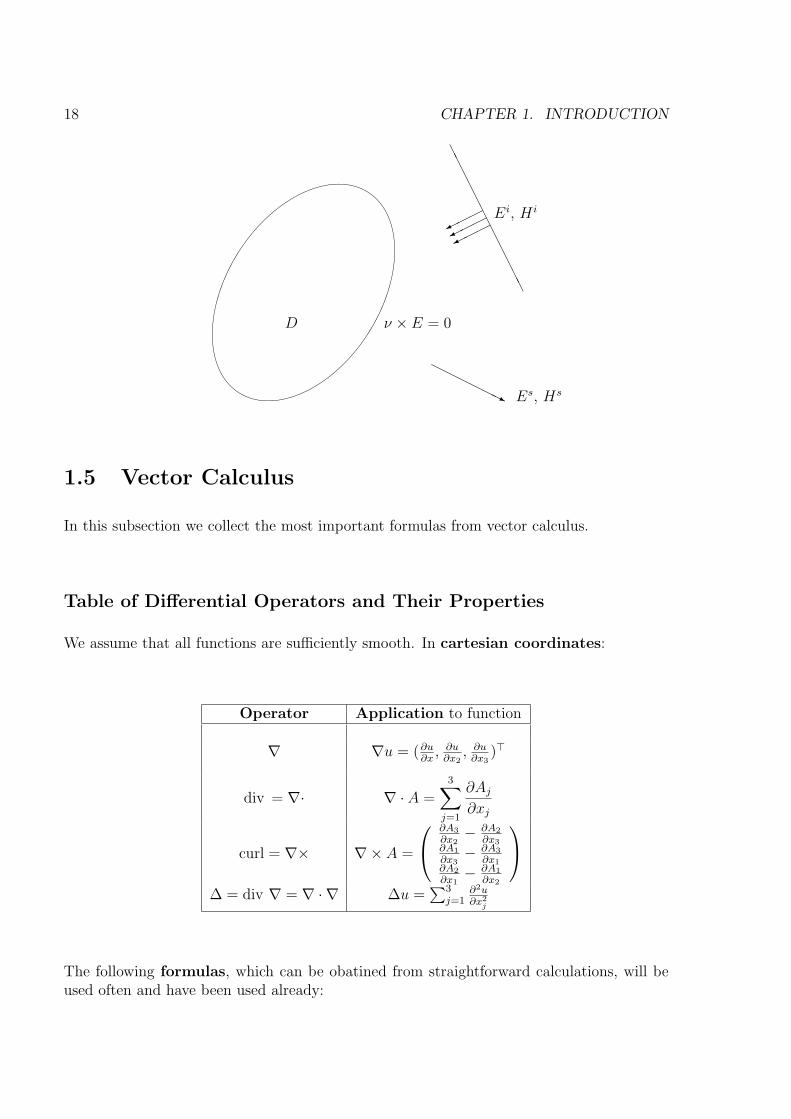
Table of Differential Operators and Their Properties
We assume that all functions are sufficiently smooth. In cartesian coordinates:
Operator Application to function
∇ ∇u = (∂u∂x
, ∂u∂x2
, ∂u∂x3
)⊤
div = ∇· ∇ · A =3∑
j=1
∂Aj
∂xj
curl = ∇× ∇× A =
∂A3
∂x2
− ∂A2
∂x3
∂A1
∂x3
− ∂A3
∂x1
∂A2
∂x1
− ∂A1
∂x2
∆ = div ∇ = ∇ · ∇ ∆u =∑3
j=1∂2u∂x2
j
The following formulas, which can be obatined from straightforward calculations, will beused often and have been used already:

1.5. VECTOR CALCULUS 19
For x, y, z ∈ C3, λ : C
3 → C und A, B : C3 → C
3 we have
x · (y × z) = y · (z × x) = z · (x × y) (1.19)
x × (y × z) = (x · z)y − (x · y)z (1.20)
curl∇u = 0 (1.21)
div curl A = 0 (1.22)
curl curl A = ∇ div A − ∆A (1.23)
div (λA) = A · ∇λ + λ div A (1.24)
curl(λA) = ∇λ × A + λ curl A (1.25)
∇(A · B) = (A · ∇)B + (B · ∇)A + A × (curl B) + B × (curl A) (1.26)
div (A × B) = B · curl A − A · curl B (1.27)
curl(A × B) = A div B − B div A + (B · ∇)A − (A · ∇)B (1.28)
For completeness we add the expressions of the differential operators ∇, div , curl, and ∆ inother coordinate systems. Let f : R
3 → C be a scalar function and F : R3 → C
3 a vectorfield.
Cylindrical Coordinates
x =
r cos ϕr sin ϕ
z
Let z = (0, 0, 1)⊤ and r = (cos ϕ, sin ϕ, 0)⊤ and ϕ = (− sin ϕ, cos ϕ, 0)⊤ be the coordinateunit vectors. Let F = Frr + Fϕϕ + Fz z. Then
∇f(r, ϕ, z) =∂f
∂rr +
1
r
∂f
∂ϕϕ +
∂f
∂zz ,
div F (r, ϕ, z) =1
r
∂(rFr)
∂r+
1
r
∂Fϕ
∂ϕ+
∂Fz
∂z,
curl F (r, ϕ, z) =
(1
r
∂Fz
∂ϕ− ∂Fϕ
∂z
)
r +
(∂Fr
∂z− ∂Fz
∂r
)
ϕ +1
r
(∂(rFϕ)
∂θ− ∂Fθ
∂ϕ
)
z ,
∆f(r, ϕ, z) =1
r
∂
∂r
(
r∂f
∂r
)
+1
r2
∂2f
∂ϕ2+
∂2f
∂z2.
Spherical Coordinates
x =
r sin θ cos ϕr sin θ sin ϕ
r cos θ
Let r = (sin θ cos ϕ, sin θ sin ϕ, cos θ)⊤ and θ = (cos θ cos ϕ, cos θ sin ϕ,− sin θ)⊤ andϕ = (− sin θ sin ϕ, sin θ cos ϕ, 0)⊤ be the coordinate unit vectors. Let F = Frr + Fθθ + Fϕϕ.

20 CHAPTER 1. INTRODUCTION
Then
∇f(r, θ, ϕ) =∂f
∂rr +
1
r
∂f
∂θθ +
1
r sin θ
∂f
∂ϕϕ ,
div F (r, θ, ϕ) =1
r2
∂(r2Fr)
∂r+
1
r sin θ
∂(sin θ Fθ)
∂θ+
1
r sin θ
∂Fϕ
∂ϕ,
curl F (r, θ, ϕ) =1
r sin θ
(∂(sin θ Fϕ)
∂θ− ∂Fθ
∂ϕ
)
r +1
r
(1
sin θ
∂Fr
∂ϕ− ∂(rFϕ)
∂r
)
θ +
+1
r
(∂(rFθ)
∂r− ∂Fr
∂θ
)
ϕ ,
∆f(r, θ, ϕ) =1
r2
∂
∂r
(
r2∂f
∂r
)
+1
r2 sin θ
∂
∂θ
(
sin θ∂f
∂θ
)
+1
r2 sin2 θ
∂2f
∂ϕ2.
Elementary Facts from Differential Geometry
Before we recall the basic integral identity of Gauss and Green we have to define rigourouslythe notion of domain with Cn−boundaries. We denote by B(x, r) := Bj(x, r) := y ∈ R
j :|y − x| < r and B[x, r] := Bj[x, r] := y ∈ R
j : |y − x| ≤ r the open and closed ball,respectively, of radius r > 0 centered at x in R
j for j = 2 or j = 3.
Definition 1.4 We call a region D ⊂ R3 to be Cn-smooth (i.e. D ∈ Cn), if there exists a
finite number of open sets Uj ⊂ R3, j = 1, . . . ,m, and bijective mappings Ψj from the closed
unit ball B3[0, 1] := u ∈ R3 : |u| ≤ 1 onto U j such that
(i) ∂D ⊂m⋃
j=1
Uj,
(ii) Ψj ∈ Cn(B[0, 1]) and Ψ−1j ∈ Cn(U j) for all j = 1, . . . ,m,
(iii) det Ψ′j(u) 6= 0 for all |u| ≤ 1, j = 1, . . . ,m, where Ψ′
j(u) ∈ R3×3 denotes the Jacobian
of Ψj at u,
(iv) it holds that
Ψ−1j (Uj ∩ D) = B+
3 (0, 1) := u ∈ R3 : |u| < 1, u3 > 0 ,
Ψ−1j (Uj ∩ ∂D) = u ∈ R
3 : |u| < 1, u3 = 0 .
We call Uj, Ψj : j = 1, . . . ,m a coordinate system of ∂D.
The restriction Ψj of the mapping Ψj to B2[0, 1] × 0 ⊂ B3[0, 1] yields a parametrizationof ∂D ∩ U j in the form x = Ψj(u) = Ψj(u1, u2, 0), u ∈ B2[0, 1].If Ψ is one of the mappings Ψj then ∂Ψ
∂u1
(u) and ∂Ψ∂u2
(u), are tangential vectors at x = Ψ(u).

1.5. VECTOR CALCULUS 21
They are linearly independent since det Ψ′(u1, u2, 0) 6= 0 and, therefore, span the tangentplane at x = Ψ(u). The unit vectors
ν(x) = ±∂Ψ∂u1
(u) × ∂Ψ∂u2
(u)∣∣∣
∂Ψ∂u1
(u) × ∂Ψ∂u2
(u)∣∣∣
for x = Ψ(u) ∈ ∂D ∩ Uj are orthogonal to the the tangent plane, thus normal vectors. Thesign is chosen such that ν(x) is directed into the exterior of D (i.e. x + tν(x) ∈ Uj \ D forsmall t > 0). The unit vector ν(x) is called the exterior unit normal vector. For suchdomains and continuous functions f : ∂D → C the surface integral
∫
∂Df(x) ds exists.
First, we need the following tool:
Lemma 1.5 For every covering Uj : j = 1, . . . ,m of ∂D there exist φj ∈ C∞(R3) withsupp(φj) ⊂ Uj for all j and
∑m
j=1 φj(x) = 1 for all x ∈ ∂D (Partition of Unity).
With such a partion of unity we write∫
∂Df(x) ds in the form
∫
∂Df ds =
∑m
j=1
∫
∂D∩Ujφj f ds =
∑m
j=1
∫
∂D∩Ujfj(x) ds with fj = φjf . Using a coordinate system Uj, Ψj : j = 1, . . . ,m of
∂D as in Definition 1.4 the integral over the surface patch Uj ∩ ∂D is given by
∫
Uj∩∂D
fj(x) ds =
∫
B2(0,1)
fj
(Ψj(u)
)∣∣∣∣
∂Ψj
∂u1
(u) × ∂Ψj
∂u2
(u)
∣∣∣∣du .
We collect important properties of the smooth domain D in the following lemma.
Lemma 1.6 Let D ∈ C2. Then there exists c0 > 0 such that
(a)∣∣ν(y) · (y − z)
∣∣ ≤ c0|z − y|2 for all y, z ∈ ∂D,
(b)∣∣ν(y) − ν(z)
∣∣ ≤ c0|y − z| for all y, z ∈ ∂D.
(c) Define
Hρ :=z + tν(z) : z ∈ ∂D , |t| < ρ
.
Then there exists ρ0 > 0 such that for all ρ ∈ (0, ρ0] and every x ∈ Hρ there existunique (!) z ∈ ∂D and |t| ≤ ρ with x = z + tν(z). The set Hρ is an open neighborhoodof ∂D for every ρ ≤ ρ0. Furthermore, z − tν(z) ∈ D and z + tν(z) /∈ D for 0 < t < ρand z ∈ ∂D.One can choose ρ0 such that for all ρ ≤ ρ0 the following holds:
• |z − y| ≤ 2|x − y| for all x ∈ Hρ and y ∈ ∂D, and
• |z1 − z2| ≤ 2|x1 − x2| for all x1, x2 ∈ Hρ.
If Uδ :=x ∈ R
3 : infz∈∂D |x − z| < δ
denotes the strip around ∂D then there existsδ > 0 with
Uδ ⊂ Hρ0⊂ Uρ0
(1.29)

22 CHAPTER 1. INTRODUCTION
(d) There exists r0 > 0 such that the surface area of ∂B(z, r) ∩ D for z ∈ ∂D can beestimated by
∣∣|∂B(z, r) ∩ D| − 2πr2
∣∣ ≤ 4πc0 r3 for all r ≤ r0 . (1.30)
Proof: We make use of a finite covering⋃
Uj of ∂D, i.e. we write ∂D =⋃
(Uj ∩ ∂D) anduse local coordinates Ψj : R
2 ⊃ B2[0, 1] → R3 which yields the parametrization of ∂D ∩ Uj.
First, it is easy to see (proof by contradiction) that there exists δ > 0 with the propertythat for every pair (z, x) ∈ ∂D × R
3 with |z − x| < δ there exists Uj with z, x ∈ Uj. Letdiam(D) = sup
|x1 − x2| : x1, x2 ∈ D
be the diameter of D.
(a) Let x, y ∈ ∂D and assume first that |y − x| ≥ δ. Then
∣∣ν(y) · (y − x)
∣∣ ≤ |y − x| ≤ diam(D)
δ2δ2 ≤ diam(D)
δ2|y − x|2 .
Let now |y − x| < δ. Then there exists Uj with y, x ∈ Uj. Let x = Ψj(u) and y = Ψj(v).Then
ν(x) = ±∂Ψj
∂u1
(u) × ∂Ψj
∂u2
(u)∣∣∣∂Ψj
∂u1
(u) × ∂Ψj
∂u2
(u)∣∣∣
and, by the definition of the derivative,
y − x = Ψj(v) − Ψj(u) =2∑
k=1
(vk − uk)∂Ψj
∂uk
(u) + a(v, u)
with∣∣a(v, u)
∣∣ ≤ c|u − v|2 for all u, v ∈ Uj and some c > 0. Therefore,
∣∣ν(x) · (y − z)
∣∣ ≤ 1
∣∣∣∂Ψj
∂u1
(u) × ∂Ψj
∂u2
(u)∣∣∣
2∑
k=1
(vk − uk)
∣∣∣∣
(∂Ψj
∂u1
(u) × ∂Ψj
∂u2
(u)
)
· ∂Ψj
∂uk
(u)
∣∣∣∣
︸ ︷︷ ︸
= 0
+1
∣∣∣∂Ψj
∂u1
(u) × ∂Ψj
∂u2
(u)∣∣∣
∣∣∣∣
(∂Ψj
∂u1
(u) × ∂Ψj
∂u2
(u)
)
· a(v, u)
∣∣∣∣
≤ c |u − v|2 = c∣∣Ψ−1
j (x) − Ψ−1j (y)
∣∣2 ≤ c0 |x − y|2 .
This proves part (a). The proof of (b) follows analogously from the differentiability of u 7→ ν.
(c) Choose ρ0 > 0 such that
(i) ρ0 c0 < 1/16 and
(ii) ν(x1) · ν(x2) ≥ 0 for x1, x2 ∈ ∂D with |x1 − x2| ≤ 2ρ0 and
(iii) Hρ0⊂ ⋃
Uj.
Assume that x has two representation as x = z1 + t1ν1 = z2 + t2ν2 where we write νj forν(zj). Then
|z1−z2| =∣∣(t2− t1) ν2 + t1 (ν2−ν1)
∣∣ ≤ |t1− t2| + ρ c0|z1−z2| ≤ |t1− t2| +
1
16|z1−z2| ,

1.5. VECTOR CALCULUS 23
thus |z1 − z2| ≤ 1615|t1 − t2| ≤ 2|t1 − t2|. Furthermore, since ν1 · ν2 ≥ 0,
(ν1 + ν2) · (z1 − z2) = (ν1 + ν2) · (t2ν2 − t1ν1) = (t2 − t1) (ν1 · ν2 + 1)︸ ︷︷ ︸
≥1
,
thus|t2 − t1| ≤
∣∣(ν1 + ν2) · (z1 − z2)
∣∣ ≤ 2c0|z1 − z2|2 ≤ 8c0|t1 − t2|2 ,
i.e. |t2 − t1|(1 − 8c0|t2 − t1|
)≤ 0. This yields t1 = t2 since 1 − 8c0|t2 − t1| ≥ 1 − 16c0ρ > 0
and thus also z1 = z2.
Let U be one of the sets Uj and Ψ : R2 ⊃ B2(0, 1) → U ∩ ∂D the corresponding bijective
mapping. We define the new mapping F : R2 ⊃ B2(0, 1) × (−ρ, ρ) → Hρ by
F (u, t) = Ψ(u) + t ν(u) , (u, t) ∈ B2(0, 1) × (−ρ, ρ) .
For sufficiently small ρ the mapping F is one-to-one and satisfies∣∣det F ′(u, t)
∣∣ ≥ c > 0 on
B2(0, 1) × (−ρ, ρ) for some c > 0. Indeed, this follows from
F ′(u, t) =
(∂Ψ
∂u1
(u) + t∂ν
∂u1
(u) ,∂Ψ
∂u2
(u) + t∂ν
∂u2
(u) , ν(u)
)⊤
and the fact that for t = 0 the matrix F ′(u, 0) has full rank 3. Therefore, F is a bijectivemapping from B2(0, 1) × (−ρ, ρ) onto U ∩ Hρ. Therefore, Hρ =
⋃(Hρ ∩ Uj) is an open
neighborhood of ∂D. This proves also that x = z − tν(z) ∈ D and x = z + tν(z) /∈ D for0 < t < ρ.
For x = z + tν(z) and y ∈ ∂D we have
|x − y|2 =∣∣(z − y) + tν(z)
∣∣2 ≥ |z − y|2 + 2t(z − y) · ν(z)
≥ |z − y|2 − 2ρc0|z − y|2
≥ 1
4|z − y|2 since 2ρc0 ≤
3
4.
Therefore, |z − y| ≤ 2|x − y|. Finally,
|x1 − x2|2 =∣∣(z1 − z2) + (t1ν1 − t2ν2)
∣∣2 ≥ |z1 − z2|2 − 2
∣∣(z1 − z2) · (t1ν1 − t2ν2)
∣∣
≥ |z1 − z2|2 − 2 ρ∣∣(z1 − z2) · ν1
∣∣ − 2 ρ
∣∣(z1 − z2) · ν2
∣∣
≥ |z1 − z2|2 − 4 ρ c0 |z1 − z2|2 = (1 − 4ρc0) |z1 − z2|2 ≥ 1
4|z1 − z2|2
since 1 − 4ρc0 ≥ 1/4.The proof of (1.29) is simple and left as an exercise.
(d) Let c0 and ρ0 as in parts (a) and (c). Choose r0 such that B[z, r] ⊂ Hρ0for all r ≤ r0
(which is possible by (1.29)) and ν(z1) · ν(z1) > 0 for |z1 − z2| ≤ 2r0. For fixed r ≤ r0 andarbitrary z ∈ ∂D and σ > 0 we define
Z(σ) =x ∈ ∂B(z, r) : (x − z) · ν(z) ≤ σ
24 CHAPTER 1. INTRODUCTION
We show thatZ(−2c0r
2) ⊂ ∂B(z, r) ∩ D ⊂ Z(+2c0r2)
Let x ∈ Z(−2c0r2) have the form x = x0 + tν(x0). Then
(x − z) · ν(z) = (x0 − z) · ν(z) + t ν(x0) · ν(z) ≤ −2c0r2 ,
i.e.
t ν(x0) · ν(z) ≤ −2c0r2 +
∣∣(x0 − z) · ν(z)
∣∣ ≤ −2c0r
2 + c0|x0 − z|2
≤ −2c0r2 + 2c0|x − z|2 = 0 ,
i.e. t ≤ 0 since |x0 − z| ≤ 2r and thus ν(x0) · ν(z) > 0. This shows x = x0 + tν(x0) ∈ D.Analogously, for x = x0 − tν(x0) ∈ ∂B(z, r) ∩ D we have t > 0 and thus
(x − z) · ν(z) = (x0 − z) · ν(z) − t ν(x0) · ν(z) ≤ c0|x0 − z|2 ≤ 2c0|x − z|2 = 2c0r2 .
Therefore, the surface area of ∂B(z, r)∩D is bounded from below and above by the surfaceareas of Z(−2c0r
2) and Z(+2c0r2), respectively. Since the surface area of Z(σ) is 2πr(r +σ)
we have−4πc0 r3 ≤ |∂B(z, r) ∩ D| − 2πr2 ≤ 4πc0 r3 .
2
Integral identities
Now we can formulate the mentioned integral identities. We do it only in R3. By Cn(D)3 we
denote the space of vector fields F : D → C3 which are n−times continuously differentiable.
By Cn(D)3 we denote the subspace of Cn(D)3 that consists of those functions F which,together with all derivatives up to order n, have continuous extentions to the closure D ofD.
Theorem 1.7 (Theorem of Gauss, Divergence Theorem)
Let D ⊂ R3 be a bounded domain which is C2−smooth. For F ∈ C1(D)3∩C(D)3 the identity
∫∫
D
div F (x) dx =
∫
∂D
Fν(x) ds
holds. In particular, the integral on the left hand side exists.
As a conclusion one derives the theorems of Green.
Theorem 1.8 (Green’s first and second theorem)
Let D ⊂ R3 be a bounded domain which is C2−smooth. Furthermore, let u, v ∈ C2(D) ∩
C1(D). Then∫∫
D
(u ∆v + ∇u · ∇v) dx =
∫
∂D
u∂v
∂νds ,
∫∫
D
(u ∆v − ∆u v) dx =
∫
∂D
(
u∂v
∂ν− v
∂u
∂ν
)
ds .

1.5. VECTOR CALCULUS 25
Here, ∂u(x)/∂ν = ν(x) · ∇u(x) for x ∈ ∂D.
Proof: The first identity is derived from the divergence theorem be setting F = u∇v. ThenF satisfies the assumption of Theorem 1.7 and div F = u ∆v + ∇u · ∇v.The second identity is derived by interchanging the roles of u and v in the first identity andtaking the difference of the two formulas. 2
We will also need their vector valued analoga.
Theorem 1.9 (Integral identities for vector fields)Let D ⊂ R
3 be a bounded domain which is C2−smooth. Furthermore, let A, B ∈ C1(D)3 ∩C(D)3 and let u ∈ C2(D) ∩ C1(D). Then
∫∫
D
curl A dx =
∫
∂D
ν × A ds , (1.31a)
∫∫
D
(B · curl A − A · curl B) dx =
∫
∂D
(ν × A) · B ds , (1.31b)
∫∫
D
(u div A + A · ∇u) dx =
∫
∂D
u (ν · A) ds . (1.31c)
Proof: For the first identity we consider the components separately. For the first one wehave
∫∫
D
(curl A)1 dx =
∫∫
D
(∂A3
∂x2
− ∂A2
∂x3
)
dx =
∫∫
D
div
0A3
−A2
dx
=
∫
∂D
ν ·
0A3
−A2
ds =
∫
∂D
(ν × A)1 ds .
For the other components it is proven in the same way.For the second equation we set F = A × B. Then div F = B · curl A − A · curl B andν · F = ν · (A × B) = (ν × A) · B.For the third identity we set F = uA and have div F = u div A+A ·∇u and ν ·F = u(ν ·A).2
Surface Gradient and Surface Divergence
We have to introduce two more notions from differential geometry, the surface gradientand surface divergence.
To continue we do need a decomposition of the vector Laplace operator. To this end wedefine some tangential differential operators on the boundary ∂D of a C2 smooth domainD ⊆ R
3 (). As an abbreviation we introduce the notation
E = Eνν + Eτ

26 CHAPTER 1. INTRODUCTION
for the normal component Eν = E · ν and the projection Eτ = ν × (E × ν) on the tangentialplane of a vectorfield E on a surface ∂D with unit normal vector field ν.
Definition 1.10 Let ϕ ∈ C1(U) be defined in a neighborhood U of the C2-boundary boundary∂D of the domain D and h ∈ C1(U) be a tangential vector field, i.e. hν = 0 for the unitnormal field ν on ∂D ∩ U .(a) The surface gradient of ϕ is defined by
∇τϕ = (∇ϕ)τ = ∇ϕ − ∂ϕ
∂νν. (1.32)
(b) The surface divergence of h is given by
Div(h) = div(h) − ν · Jhν. (1.33)
where Jh denotes the Jacobian matrix of h.
Example 1.11 We parametrize the boundary of the unit sphere S2 = x ∈ R3 : ‖x‖ = 1
by spherical coordinates
Ψ(θ, φ) =(sin θ cos φ, sin θ sin φ, cos θ)⊤ .
Then the surface gradient and surface divergence on S2 are given by
Grad f(θ, φ) =∂f
∂θ(θ, φ) θ +
1
sin θ
∂f
∂φ(θ, φ) φ ,
Div F (θ, φ) =1
sin θ
∂
∂θ
(sin θ Fθ(θ, φ)
)+
1
sin θ
∂Fφ
∂φ(θ, φ) ,
where θ = (cos θ cos φ, cos θ sin φ,− sin θ)⊤ and φ = (− sin θ sin φ, sin θ cos φ, 0)⊤ are the tan-gential vectors which span the tangent plane and Fθ, Fφ are the components of F w.r.t. these
vectors, i.e. F = Fθθ + Fφφ. From this we note that
Div Grad f(θ, φ) =1
sin θ
∂
∂θ
(
sin θ∂f
∂θ(θ, φ)
)
+1
sin2 θ
∂2f
∂φ2(θ, φ) .
This differential operator is called the Laplace-Beltrami operator and will be denoted by∆S = Div Grad .
Since ∂D is the closed boundary of a bounded domain applying the divergence theorem leadsto teh surface divergence theorem.
Lemma 1.12 The surface divergence defined in (1.33) satisfies
∫
∂D
Div(h) ds = 0.

1.5. VECTOR CALCULUS 27
Proof Let ν ∈ C2(D) ∩ C1(D) be an extension of the normal vector ν to the boundeddomain D ⊆ R
3. The identity (1.28) leads to
ν · curl(ν × h) = div(h) − hνdiv(ν) + ν · Jνh − ν · Jhν.
By differentiation of ν · ν = 1 on ∂D we obtain ν · Jνh = 0. And h · ν = 0 on ∂D yields
Div(h) = ν · curl(ν × h). (1.34)
Finally the divergence theorem implies∫
∂D
Div(h) ds =
∫
D
div(curl(ν × h)) dx = 0 .
2
From the product rule it follows that
Div(ϕh) = (∇τϕ) · h + ϕ Div(h).
The previous Lemma implies the partial integration formula∫
∂D
Div(h)ϕ ds = −∫
∂D
(∇τϕ) · h ds. (1.35)
Lemma 1.13 The tangential gradient and the tangential divergence depend only on thevalues ϕ|∂D and the tangential field h|∂D on ∂D, respectively.
Proof Let ϕ1, ϕ2 ∈ C∞(U) be such that ϕ = ϕ1 − ϕ2 vanishes on ∂D. The identity (1.35)shows ∫
∂D
(∇τϕ) · h ds = 0
for all h ∈ C1(U). Thus, choosing h ∈ C1(U) with h|∂D = ∇τϕ yields ∇τϕ = 0 on ∂D. By adensity argument follows the equation for continuously differentiable functions ϕ. Similarlythe assertion for the tangential divergence is obtained. 2
...
Corollary 1.14 Let w ∈ C1(D)3 such that w, curl w ∈ C(D)3. Then the surface divergenceof ν × w exists and is given by
Div(ν × w) = −ν · curl w on ∂D . (1.36)
Proof: Let ϕ ∈ C1(D) be arbitrary. By Gauss’ theorem:∫
∂D
ϕ ν · curl w ds =
∫∫
D
div (ϕ curl w) dx =
∫∫
D
∇ϕ · curl w dx
=
∫∫
D
div (w ×∇ϕ) dx =
∫
∂D
ν · (w ×∇ϕ) ds
=
∫
∂D
(ν × w) · Grad ϕ ds = −∫
∂D
Div(ν × w) ϕ ds .
The assertion follows since ϕ is arbitrary. 2