Embed Size (px)
Citation preview

The moving bottleneck problem:
a Hamilton-Jacobi approach
Guillaume Costesequein collaboration with Aurelien Duret
Inria Sophia-Antipolis Mediterranee& Universite de Lyon, IFSTTAR-ENTPE
TRAM3 Terminus Meeting 2016, Sophia-AntipolisJanuary 07, 2016
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 1 / 42

Motivation
Example
Congested off-ramp
[Richmond Bridge, c©Bay Area Council]
Traffic flow model for the upstream section?
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 2 / 42

Motivation
Outline
1 Introduction to traffic
2 The moving bottleneck theory
3 Mesoscopic formulation of multiclass multilane models
4 Numerical scheme
5 Conclusion and perspectives
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 3 / 42

Introduction to traffic
Outline
1 Introduction to traffic
2 The moving bottleneck theory
3 Mesoscopic formulation of multiclass multilane models
4 Numerical scheme
5 Conclusion and perspectives
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 4 / 42

Introduction to traffic Macroscopic models
Convention for vehicle labeling
N
x
t
Flow
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 5 / 42

Introduction to traffic Macroscopic models
Three representations of traffic flow
Moskowitz’ surface
Flow x
t
N
x
See also [Moskowitz and Newman(1963), Makigami et al(1971), Laval and
Leclercq(2013)]
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 6 / 42

Introduction to traffic Macroscopic models
Notations(macroscopic)
N(t, x) vehicle label at (t, x)
the flow q(t, x) = lim∆t→0
N(t +∆t, x)− N(t, x)
∆t,
x
N(x , t ±∆t)
the density ρ(t, x) = lim∆x→0
N(t, x) − N(t, x +∆x)
∆x,
x
∆x
N(x ±∆x , t)
the stream speed (mean spatial speed) V (t, x).
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 7 / 42

Introduction to traffic Focus on LWR model
First order: the LWR model
LWR model [Lighthill and Whitham, 1955], [Richards, 1956]
Scalar one dimensional conservation law
∂tρ+ ∂xQ (ρ) = 0, (t, x) ∈ (0,+∞) × R (1)
withQ : ρ 7→ q =: Q (ρ)
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 8 / 42

Introduction to traffic Focus on LWR model
Overview: conservation laws (CL) / Hamilton-Jacobi (HJ)
Eulerian Lagrangiant − x t − n
CLVariable Density ρ Spacing r := 1
ρ
Equation ∂tρ+ ∂xQ(ρ) = 0 ∂t r + ∂nV (r) = 0
HJ
Variable Label N Position X
N(t, x) =
∫ +∞
x
ρ(t, ξ)dξ X (t, n) =
∫ +∞
n
r(t, η)dη
Equation ∂tN − Q (−∂xN) = 0 ∂tX − V (−∂nX ) = 0
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 9 / 42
Introduction to traffic Mesoscopic resolution
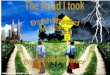
Notations(micro and meso)
Speed
Time
(i − 1)Space
x
Spacing
Headway
t
(i)
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 10 / 42

Introduction to traffic Mesoscopic resolution
Mesoscopic resolution of the LWR model
Speed
Time
(i − 1)Space
x
Spacing
Headway
t
(i) Introduce
the pace p :=1
vthe headway h = H(p)
the passing time
T (n, x) :=
∫ x
−∞
p(n, ξ)dξ.
{
∂nT = h, (headway)
∂xT = p, (pace)
[Leclercq and Becarie(2012), Laval and Leclercq(2013)]
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 11 / 42

Introduction to traffic Mesoscopic resolution
Mesoscopic resolution of the LWR model(Continued)
Lagrangian-spacen− x
CLVariable Pace p
Equation ∂np − ∂xH(p) = 0
HJ
Variable Passing time T
T (n, x) =
∫ x
−∞
p(n, ξ)dξ
Equation ∂nT − H (∂xT ) = 0
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 12 / 42

Introduction to traffic Mesoscopic resolution
Lax-Hopf formula
1
u
H
p
1
κ
1
C
1
wκ
Assume
H(r) =
1
κr +
1
wκ, if r ≥
1
u,
+∞, otherwise,
Proposition (Representation formula (Lax-Hopf))
The solution under smooth boundary conditions is given by
T (n, x) = max{
T (n, 0) +x
u︸ ︷︷ ︸
= free flow
, T(
0, x +n
κ
)
+n
wκ︸ ︷︷ ︸
= congested
}
. (2)
See [Laval and Leclercq(2013)]G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 13 / 42

Introduction to traffic Mesoscopic resolution
Lax-Hopf formula
0
1
κ
x
n
n
x T (n, x)
T (n, 0)
T (0, x)
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 14 / 42

Introduction to traffic Mesoscopic resolution
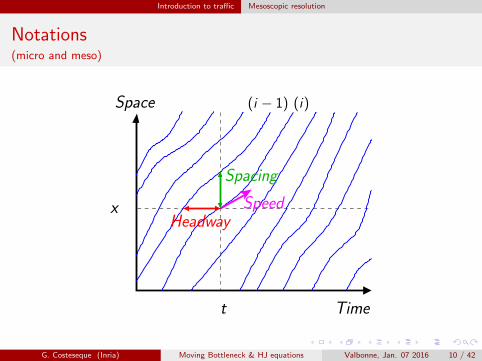
Dynamic programming
n
x +∆x
x −∆x
n −∆n
x
1
κ
x
n
∆x
∆n
T (n, x)
Introduce a grid with steps(∆n,∆x) satisfying
∆n = κ∆x
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 15 / 42

Introduction to traffic Mesoscopic resolution
Mesoscopic: what for?
Strengths1 Consistent with micro and macro representations2 Large scale networks // spatial discontinuities OK3 Data assimilation (from Eulerian and Lagrangian sensors)
Weakness1 Single pipe2 Mono class3 No capacity drop at junctions
Developments1 Multilane and multiclass approach2 Friction term
−→ Moving bottleneck theory
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 16 / 42

The moving bottleneck theory
Outline
1 Introduction to traffic
2 The moving bottleneck theory
3 Mesoscopic formulation of multiclass multilane models
4 Numerical scheme
5 Conclusion and perspectives
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 17 / 42

The moving bottleneck theory
Some definitionsFollowing [Gazis and Herman(1992), Newell(1998), Laval and Leclercq(2013)],
Definition
A moving bottleneck (MB) is defined as a vehicle with a maximal free flowspeed strictly lower than the free flow speed of its immediate followingvehicle.
A moving bottleneck is said to be active if and only if it generates queuesat upstream positions with respect to the moving bottleneck and if theupstream state is different from the downstream state.
The passing rate is the maximal flow that can overtake the movingbottleneck in the Eulerian framework.
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 18 / 42

The moving bottleneck theory
Notations
vB
−w
−w
vB
k
Q
(N − 1) lanes N lanes
R(vB , qD)
(D) (U)
ξN(t)
x
(U) (D)
vB
kD (N − 1)κ Nκ
qD
NC
Q∗(vB)
u
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 19 / 42

The moving bottleneck theory
Notations
vB
−w
−w
vB
k
Q
(N − 1) lanes N lanes
R(vB , qD)
(D) (U)
ξN(t)
x
(U) (D)
vB
kD (N − 1)κ Nκ
qD
NC
Q∗(vB)
u
ξN(t) = trajectory of the MB in t − x
ξT (n) = location where the vehicle ncrosses the MB
vB(t) := ξN(t) MB speed
kD := k (t, ξN(t)+) downstream
density,
qD := Q(kD) downstream flow,
R(vB , qD) = passing rate
R(vB , qD) := qD − kDvB
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 20 / 42

The moving bottleneck theory
Math problem in Eulerian framework
Coupled ODE-PDE problem on [0,+∞)× R
∂tk + ∂x (Q(k)) = 0,
Q(k(t, ξN(t)))− ξN(t)k(t, ξN(t)) ≤N − 1
NQ∗
(
ξN(t))
,
ξN(t) = min {vb, V (k(t, ξN(t)+))} ,
(3)
with {
k(0, x) = k0(x), on R,
ξN(0) = ξ0.(4)
Theorem (Existence result [Delle Monache and Goatin(2014)])
For BV initial data, there exist weak solutions of (3)-(4).Uniqueness is still an open problem.
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 21 / 42

The moving bottleneck theory
Interpretation
Remark
Upper bound on the passing rate in (3) depends on the moving bottleneckspeed
vB(t) 7→ Q∗(vB(t))
and it is the Legendre-Fenchel transform of the flow-density FD Q
Q∗(v) := supρ∈Dom(Q)
{Q(ρ)− vρ} .
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 22 / 42

Mesoscopic formulation of multiclass multilane models
Outline
1 Introduction to traffic
2 The moving bottleneck theory
3 Mesoscopic formulation of multiclass multilane models
4 Numerical scheme
5 Conclusion and perspectives
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 23 / 42

Mesoscopic formulation of multiclass multilane models
Stretch of road [x0, x1] composed by N separate lanes
Two classes of users: “rabbits” (I = 1) and “slugs” (I = 2).
Class-dependent Hamiltonian
H : (r , I ) 7→ H(r , I )
for a given class attribute I ∈ {1, 2}
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 24 / 42

Mesoscopic formulation of multiclass multilane models
Stretch of road [x0, x1] composed by N separate lanes
Two classes of users: “rabbits” (I = 1) and “slugs” (I = 2).
Class-dependent Hamiltonian
H : (r , I ) 7→ H(r , I )
for a given class attribute I ∈ {1, 2}
If triangular, then u1 > u2
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2Density (veh/m)
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Flo
w (
veh/
s)
Fundamental Diagrams
RabbitsSlugs
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 24 / 42

Mesoscopic formulation of multiclass multilane models Capacity drop
Capacity drop parameter
(U)(D)
(U)Case FIFOCase non−FIFO
(U) (D)
Flow
(MB)
vB
R(vB , qD)
δ = 1δ = 0
r
H
1
κ
1
urB =
1
vB
hB =1
qD
1
R(vB , qD)
vB
1
C1
wκ
Introduce parameter δ ∈ [0, 1]
If δ = 0, strictly non-FIFO
If 0 < δ < 1, reduction of theresidual headway on the passinglane(s)
If δ = 1, strictly FIFO
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 25 / 42

Mesoscopic formulation of multiclass multilane models Capacity drop
Illustration of the capacity drop effect
Link composed of two lanesA single vehicle from class 2 (MB)No capacity drop occurs δ = 0
Time (s)40 60 80 100 120 140 160 180
Spa
ce (
m)
0
100
200
300
400
500
600
700
800
900
1000
Trajectories
T2(n, x)
T1(n, x)
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 26 / 42

Mesoscopic formulation of multiclass multilane models Capacity drop
Time (s)40 60 80 100 120 140 160 180
Spa
ce (
m)
0
100
200
300
400
500
600
700
800
900
1000
Trajectories
T2(n, x)
T1(n, x)
Time (s)40 60 80 100 120 140 160 180
Spa
ce (
m)
0
100
200
300
400
500
600
700
800
900
1000
Trajectories
T2(n, x)
T1(n, x)
δ = 1 δ = 0.6
Time (s)40 60 80 100 120 140 160 180
Spa
ce (
m)
0
100
200
300
400
500
600
700
800
900
1000
Trajectories
T2(n, x)
T1(n, x)
Time (s)40 60 80 100 120 140 160 180
Spa
ce (
m)
0
100
200
300
400
500
600
700
800
900
1000
Trajectories
T2(n, x)
T1(n, x)
δ = 0.4 δ = 0.2
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 27 / 42

Mesoscopic formulation of multiclass multilane models Expression of the MCML model
System of coupled PDEs
∂nT1 − H (∂xT1, I1) = 0,
∂nT2 − H (∂xT2, I2) = 0,
H (∂xT1(n, ξ(n)), I1)− (1− δ)ξ (n∗2) ∂xT1(n, ξ(n))
≥N
N − 1H⊠
(
(1− δ)ξ (n∗2) , I1
)
,
T2 (n, ξ(n)) ≥ T1(n∗
1, ξ(n)) + H (∂xT1(n∗
1, ξ(n)), I2) ,
(5)
whereH⊠(s, I ) = inf
r∈Dom(H(·,I )){H(r , I ) − sr}
{
n∗2 := argmax T2(·, ξ(n)) and ξ(n) = ξ(n∗2), for n ∈ [n0,+∞),
n∗1 := argmax T1(·, ξ(n)) for n ∈ [n0,+∞),
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 28 / 42

Mesoscopic formulation of multiclass multilane models Expression of the MCML model
+ mixed Neumann-Dirichlet boundary conditions
∂nTi (n, x0) = gi (n), on [n0,+∞),
∂nTi (n, x1) = gi (n), on [n0,+∞),
Ti (n0, x) = Gi(x), on [x0, x1],
for i ∈ {1, 2} . (6)
x
nn0
x1
x0
Downstream Supply
Upstream Demand
First trajectory
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 29 / 42

Mesoscopic formulation of multiclass multilane models Expression of the MCML model
Assumptions
1
ur
1
(N − 1)κ
ξ(n∗2) ξ(n∗2)
N lanes
(N − 1) lanes
1
Nκ
hB =1
(N − 1)C
rB
1
NC
1
Nwκ
H∗(
ξ(n∗2))
hB −ξ(n∗2)
u
H
n∗i (i ∈ {1, 2}: the nearestleader from class i for vehicle nof class j 6= i
Modified passing headway H
H =1
1− δhB −
ξT (n∗2)
u1
where hB =1
(N − 1)Cis the
residual headway
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 30 / 42

Numerical scheme
Outline
1 Introduction to traffic
2 The moving bottleneck theory
3 Mesoscopic formulation of multiclass multilane models
4 Numerical scheme
5 Conclusion and perspectives
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 31 / 42

Numerical scheme Setting of the IBV Problem
Finite steps (∆n,∆x) > 0
∆n = κ∆x .
Class-specific Hamiltonians H are triangular
H(r , Ii ) =
1
κN(Ii )
(
r +1
w
)
, if r ≥1
ui,
+∞, otherwise,
(7)
N(Ii ) stands for the number of lanes that are accessible for the class i
N(Ii ) :=
{
N, for i = 1,
1, for i = 2.
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 32 / 42
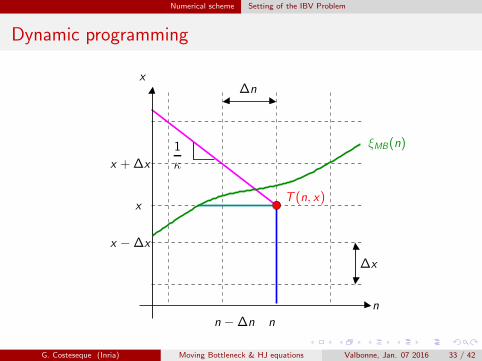
Numerical scheme Setting of the IBV Problem
Dynamic programming
∆n
n
x +∆x
x −∆x
n −∆n
x
1
κ
T (n, x)
ξMB(n)
∆x
x
n
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 33 / 42

Numerical scheme Lax-Hopf formulæ for the MCML model
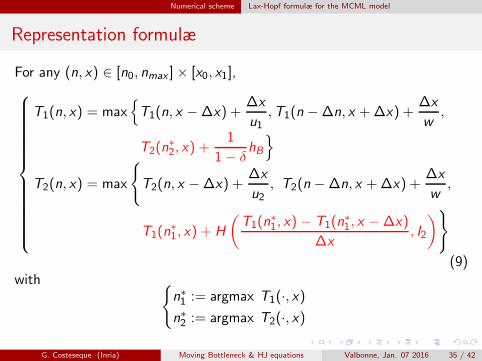
Representation formulæ
For any (n, x) ∈ [n0, nmax ]× [x0, x1],
T1(n, x) = max
{
T1(n, x −∆x) +∆x
u1,T1(n −∆n, x +∆x) +
∆x
w
}
,
T2(n, x) = max
{
T2(n, x −∆x) +∆x
u2, T2(n −∆n, x +∆x) +
∆x
w
}
(8)
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 34 / 42
Numerical scheme Lax-Hopf formulæ for the MCML model
Representation formulæ
For any (n, x) ∈ [n0, nmax ]× [x0, x1],
T1(n, x) = max{
T1(n, x −∆x) +∆x
u1,T1(n −∆n, x +∆x) +
∆x
w,
T2(n∗
2, x) +1
1− δhB
}
T2(n, x) = max
{
T2(n, x −∆x) +∆x
u2, T2(n −∆n, x +∆x) +
∆x
w,
T1(n∗
1, x) + H
(T1(n
∗
1, x) − T1(n∗
1, x −∆x)
∆x, I2
)}
(9)with {
n∗1 := argmax T1(·, x)
n∗2 := argmax T2(·, x)
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 35 / 42

Numerical scheme Some mathematical results
Proposition (Existence of a continuous solution to (5)-(6))
Assume that r 7→ H (r , Ii ) is convex for any i ∈ {1, 2}. Then, the IBVproblem (5)-(6) admits a solution (T1,T2) continuous on[n0,+∞]× [x0, x1].
Proposition (Convergence)
Assume that r 7→ H (r , Ii ) is convex for any i ∈ {1, 2}. Then the numericalsolution (T ε
1 ,Tε
2 ) of the scheme (9) converges towards a continuoussolution (T1,T2) of the IBV problem (5)-(6) when ε := (∆n,∆x) goestoward zero.
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 36 / 42
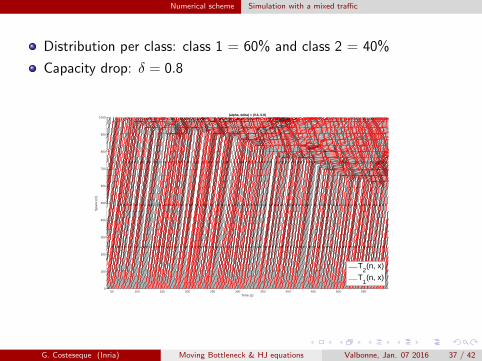
Numerical scheme Simulation with a mixed traffic
Distribution per class: class 1 = 60% and class 2 = 40%
Capacity drop: δ = 0.8
50 100 150 200 250 300 350 400 450 500 550Time (s)
0
100
200
300
400
500
600
700
800
900
1000
Spa
ce (
m)
(alpha, delta) = (0.6, 0.8)
T2(n, x)
T1(n, x)
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 37 / 42

Numerical scheme Simulation with a mixed traffic
20 40 60 80 100 120 140 160 180 200 220 240Vehicle label
40
60
80
100
120
140
160
180
Tra
vel t
ime
(s)
Class 1
20 40 60 80 100 120 140 160Vehicle label
40
60
80
100
120
140
160
180
Tra
vel t
ime
(s)
Class 2
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 38 / 42

Conclusion and perspectives
Outline
1 Introduction to traffic
2 The moving bottleneck theory
3 Mesoscopic formulation of multiclass multilane models
4 Numerical scheme
5 Conclusion and perspectives
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 39 / 42

Conclusion and perspectives
A new event-based mesoscopic model for multi-class traffic flowmodeling on multi-lane sections
Theory of moving bottlenecks
Wide networks
Among the perspectives:
Well posedness
Sensitivity analysis (→ Regis’ presentation)
Validation with real traffic data
Data assimilation for real-time applications (→ Francesca’spresentation)
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 40 / 42
References
Some references I
Delle Monache, M. L., Goatin, P., 2014. Scalar conservation laws with movingconstraints arising in traffic flow modeling: an existence result. Journal ofDifferential equations 257 (11), 4015–4029.
Gazis, D. C., Herman, R., 1992. The moving and “phantom” bottlenecks.Transportation Science 26 (3), 223–229.
Laval, J. A., Leclercq, L., 2013. The Hamilton–Jacobi partial differential equationand the three representations of traffic flow. Transportation Research Part B:Methodological 52, 17–30.
Leclercq, L., Becarie, C., 2012. A meso LWR model designed for networkapplications. In: Transportation Research Board 91th Annual Meeting. Vol. 118. p.238.
Newell, G. F., 1998. A moving bottleneck. Transportation Research Part B:Methodological 32 (8), 531–537.
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 41 / 42

References
Thanks for your attention
Any question?
G. Costeseque (Inria) Moving Bottleneck & HJ equations Valbonne, Jan. 07 2016 42 / 42