Embed Size (px)
Citation preview

The MU Mites Robot Team
Marjorie SkubicDerek Anderson
Srikanth KavirayaniMohammed Khalilia
Benjamin Shelton
Computational Intelligence Research LabUniversity of Missouri-Columbia

Outline
• A sketch interface for one robot (previous)
• A new sketch interface for controlling a robot team
• Robot design
• Robot formations
• Sketch understanding methods
• Concluding Remarks

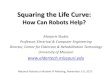
A Sketch Interface for One Robot
The user sketches a route map for the robot to follow.

A Sketch Interface for One Robot
chair
crate
table
files
trash boxes
cabinet
desk
And the robot follows the sketch.
How can we use a sketch-based interface to control a team of robots?
Guinness

A Sketch Interface for a Robot TeamSketch a robot formation

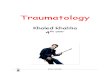
Robot Design
Sensors:IR receiver for commandsCMUcam (color) 3 front IR sensors1 rear IR sensorUse knob setting for ID#
Actuators:2 motors for differential control
with wheel encodersand a passive front wheel
Servo motor for the camera

Robot Formations
• Follow the leader– Leader moves straight
– Followers track & follow orange

Robot Formations
• Follow the leader in a circle– Leader moves clockwise or
counter-clockwise as drawn
– Followers track & follow orange

Robot Formations
• Follow the leader in a square– Leader moves clockwise or
counter-clockwise as drawn– Followers move in squares of a
different size

Robot Formations
• March side by side– Cameras aimed at the side
– Track green & move forward

Sketch Pad Reference FrameUser can set the reference frame
Default: Assume initial robot direction is away from the user
1. Go forward2. Turn right, go forward
3. Turn left, go forward
4. Turn around, go forward

Sketch Understanding Methods
• Symbol recognition via trained Hidden Markov Models – clockwise and counter-clockwise– Arrow
– Line
– Rectangle
– Ellipse
– Triangle
From AAAI Fall Symposium 2004 paper (Anderson, Bailey & Skubic)

Sketch Understanding Methods
• HMM features– Local angle
– Independent of orientation
• Global feature– Open vs. closed
• Filter out false alarms using local features
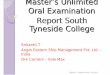
Feature extraction
Feature Distribution for Triangle (left) and Circle (right)

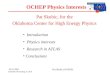
Sketch Understanding Methods
Typical HMM Results
Correctly recognized
Correctly not recognized

Sketch Understanding Methods
• Squiggle for a robot icon– Displayed as a solid
black circle
• Delete robot icon– 2 short lines that
intersect
– Shown in green
• Move robot icon– Grab and drag to new
location

PDA to Robot Commands
• Control commands– Forward– Reverse– Right turn– Left turn– Turn around– Stop
• Initialization– Reset ID– Set ID from sensors
• Formations– March 2
– March 3
– Follow 2-Line
– Follow 3-Line
– Left Circle
– Right Circle
– Left Square
– Right Square

PDA-only Functions
• Clear the sketch
• Set reference frame
• Reference frame instruction
• Train IR commands
• Toggle IR on/off
• Toggle sound on/off

Challenges
• Recognizing sketched symbols – Complicated by multiple PDA platforms
• Interpreting a configuration of symbols• Editing commands on the PDA• IR communication from PDA to robot• Defining a reference frame for directional
commands • Multi-robot formations based on local sensing
only

Future Work• Sketch understanding
– Explore different features for improved recognition
– Extend the recognizer to multi-stroke symbols
– Explore hierarchical representations for symbol configurations
• Robot control– Scale up to support communication, synchronization, and
negotiation between robots
– Investigate more complex tasks
Supported in part by the Naval Research Lab
Publications at www.cecs.missouri.edu/~skubic/Papers

The Team
Derek SrikanthMohammed Ben