Embed Size (px)
Citation preview

U.U.D.M. Project Report 2018:4
Examensarbete i matematik, 30 hpHandledare: Wolfgang StaubachExaminator: Denis GaidashevMaj 2018
Department of MathematicsUppsala University
The Orbit Method and Geometric Quantisation
Malte Litsgård


ABSTRACT
In this thesis we study Kirillov’s orbit method, a method for establishing acorrespondence between unitary representations of Lie groups and geometricobjects called coadjoint orbits. We give a comprehensible introduction andinvestigate the relation to its counterpart in mathematical physics known as
geometric quantisation, a way of passing from a classical mechanical system to aquantum mechanical system by methods from symplectic geometry.

Acknowledgements
I give my deepest thanks to my supervisor Wulf Staubach for introducing me tothis beautiful subject and for being such an unlimited source of inspiration.
I am also indebted to Andreas Strömbergsson for his careful reading of an earlydraft of the manuscript and for his many valuable comments and suggestions that
have been incorporated in the text and improved the presentation.

4
Contents
1 Introduction 5
2 Lie Groups and Representations 52.1 Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Representations of Lie Groups . . . . . . . . . . . . . . 9
3 Mechanics and Quantisation 133.1 Classical Mechanics . . . . . . . . . . . . . . . . . . . . 133.2 Symplectic Geometry . . . . . . . . . . . . . . . . . . . 143.3 Quantisation . . . . . . . . . . . . . . . . . . . . . . . . 17
4 Prequantisation 184.1 Vector Bundles . . . . . . . . . . . . . . . . . . . . . . 194.2 The Prequantum Line Bundle . . . . . . . . . . . . . . 244.3 Cohomology . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3.1 de Rham Cohomology . . . . . . . . . . . . . . . 264.3.2 The Čech Cohomology Groups . . . . . . . . . . 27
4.4 The Integrality Condition . . . . . . . . . . . . . . . . . 274.5 The Prequantum Hilbert Space . . . . . . . . . . . . . . 28
5 Quantisation 325.1 Polarization . . . . . . . . . . . . . . . . . . . . . . . . 325.2 The Right Hilbert Space . . . . . . . . . . . . . . . . . 35
6 The Orbit Method 396.1 Coadjoint Orbits . . . . . . . . . . . . . . . . . . . . . . 396.2 Unitary Representations from Coadjoint Orbits . . . . . 436.3 Examples . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.3.1 The Heisenberg Group . . . . . . . . . . . . . . 466.3.2 SU(2) . . . . . . . . . . . . . . . . . . . . . . . 50

5
1 Introduction
The orbit method (or the method of coadjoint orbits), first developed by AlexandreKirillov in the early 1960’s, is a method for finding unitary representations of Liegroups. Kirillov worked on the case of nilpotent groups and in the special case ofnilpotent, simply connected groups the theory produces a perfect correspondencebetween the coadjoint orbits of the group and its irreducible, unitary representa-tions. The theory was later extended to solvable groups by Bertram Kostant, LajosPukánszky, Jean-Marie Souriau and others. More recently, David Vogan and othershas studied the case of reductive groups. The main purpose of the orbit methodis not to explicitly find all unitary representations of a given Lie group, but ratherto establish a correspondence between the so called coadjoint orbits of the group,which are geometric objects, and its unitary representations. Admittedly, it onlyworks prefectly for certain classes of Lie groups (which is why it is called a method,rather than a theorem), but it has been conjectured that the orbit method may beused to find all representations needed to study automorphic forms (see Vogan [10]).This is but one of the reasons why it seems to be worthy of study.
Geometric quantisation1 deals with defining a quantum theory given a particu-lar classical theory. In its modern form, it was mainly developed by Kostant andSouriau. The theory of geometric quantisation can be seen as a physical counterpartof the orbit method and the main goal of this thesis is to illustrate this.
We give an introduction to the orbit method through a mathematical descriptionof geometric quantisation. The reader is assumed to be familiar with differentialgeometry, however we recall some basic facts from the theory of Lie groups/algebrasand their representations.
2 Lie Groups and Representations
2.1 Preliminaries
We assume that the reader is already somewhat familiar with Lie groups, howeverwe will begin this section by recalling some basic concepts from the theory of Liegroups and Lie algebras. For further details on this subject, we recommend Hall [9].
Definition 2.1. A Lie group is a smooth manifold G equipped with a group structure,such that the group operation
G×G→ G, (g, g′) 7→ gg′
and inversionG→ G, g 7→ g−1
1Note that we have chosen the English spelling, in the literature one often sees the Americanspelling quantization.

6
are smooth maps.
A large class of Lie groups are the so called matrix Lie groups. These are theLie groups G that are closed subgroups of GL(n,C). That is, G is a subgroup ofGL(n,C) such that if Ak is a sequence of linear maps in G which converges to A,then either A ∈ G or det(A) = 0. Many interesting Lie groups are matrix groups,such as the special linear group SL(n,C), the unitary and orthogonal groups U(n)
and O(n) with their special subgroups SU(n) and SO(n), the Lorentz group O(3; 1),the symplectic groups Sp(n,R), the Euclidean groups, the Pointcaré groups, andthe Heisenberg group, to name a few examples.
Definition 2.2. A Lie group homomorphism is a group homomorphism
ϕ : G→ H
which is continuous.
Note that we could have defined a Lie group homomorphism as a smooth grouphomomorphism, but it turns out that a continuous group homomorphism from oneLie group to another is automatically smooth.
Lie groups inherit topological properties such as compactness, connectedness andsimple connectedness from its underlying manifold.
In this thesis we will be particularly interested in the action of Lie groups onmanifolds and the arising orbits. Let us recall some fundamental definitions.
Definition 2.3. A Lie group action of a Lie group G on a manifold M is a contin-uous map
G×M →M, (g, x) 7→ g · x
satisfying the following conditions:
1. e · x = x, where e is the identity element in G;
2. g · (h · x) = (gh) · x.
Definition 2.4. Given a Lie group action of G on M , the orbit of an elementx ∈M is the subset
Ox := G · x.
The stabilising group Gx is the subgroup
Gx = g ∈ G : g · x = x,
and we have a diffeomorphism (under the condition that the action is smooth)
Ox ∼= G/Gx.

7
Definition 2.5. A (real or complex) Lie algebra is a vector space g (over R or C),equipped with a bilinear map
[·, ·] : g× g→ g,
such that for all X, Y, Z ∈ g the following holds:
1. [X, Y ] = − [Y,X] (skew symmetry);
2. [X, [Y, Z]] + [Y, [Z,X]] + [Z, [X, Y ]] = 0, (the Jacobi identity).
The map [·, ·] is called the bracket on g.
Two elements X, Y ∈ g commute if [X, Y ] = 0. In particular, if [X, Y ] = 0 forall X, Y ∈ g, then the Lie algebra g is said to be commutative.
Definition 2.6. A subalgebra of a Lie algebra g is a subspace h of g which is closedunder the bracket of g.
If [X,H] ∈ h for all X ∈ g and H ∈ h, then h is said to be an ideal in g.The center of g is the set of X ∈ g which commute with all Y ∈ g.A Lie algebra is called irreducible if it has no nontrivial ideals. If a Lie algebra
is irreducible and non-commutative it is called simple.
Definition 2.7. Let g and h be Lie algebras. A Lie algebra homomorphism is alinear map φ : g→ h such that for all X, Y ∈ g
φ([X, Y ]) = [φ(X), φ(Y )] .
Definition 2.8. Let g be a Lie algebra and X ∈ g and define a linear map
adX : g→ g, Y 7→ adX(Y ) := [X, Y ] .
Then the map X 7→ adX is called the adjoint map.
Note that by the Jacobi identity, we have
ad[X,Y ] = [adX , adY ] ,
that is, the mapping ad : g→ End(g) is a Lie algebra homomorphism.
Definition 2.9. On a Lie algebra g we define the symmetric, bilinear form
B(X, Y ) = trace(adXadY ).
The form B is called the Killing form.
Definition 2.10. Let g be a Lie algebra. We define the sequence of ideals called theupper central series as follows.
gj =
g, if j = 0,
X ∈ g : X = [Y, Z] , Y ∈ g, Z ∈ gj−1, if j > 0.

8
The Lie algebra g is called nilpotent if gj = 0 for some j.
Proposition 2.11. If g is a nilpotent Lie algebra, then the Killing form on g isidentically zero.
Let us briefly recall the relationship between Lie algebras and Lie groups.
Definition 2.12. Let G be a Lie group and TeG the tangent space at e ∈ G. LetX ∈ TeG and let γX(t) be the maximal integral curve of X. Then we define theexponential map by
exp(X) := γX(1).
We remark that if G is a matrix Lie group, then the exponential map is simplythe usual matrix exponentiation
exp(X) = eX =∞∑k=0
Xk
k!.
Definition 2.13. Let G be a Lie group. The Lie algebra of G, denoted Lie(G) org, is the space of left-invariant vector fields on G, i.e. vector fields X ∈ Γ(G) suchthat
Xg = dlgXe,
where lg is the left translation on G: lg(g′) = gg′. The bracket operation on g is theusual commutator of vector fields, i.e.
[X, Y ] = XY − Y X.
Clearly, g can be identified with the tangent space at the identity element ofG. When G is a matrix Lie group, its Lie algebra can be defined as the space ofmatrices X such that
etX ∈ G,
for all t ∈ R.
Theorem 2.14. Let G and H be Lie groups, and let g and h be their Lie algebras.Let Φ : G → H be a Lie group homomorphism. Then there exists a unique Liealgebra homomorphism φ : g→ h such that the following diagram commutes.
g h
G H
φ
exp exp
Φ
Definition 2.15. Let G be a matrix Lie group with Lie algebra g. For each g ∈ G,we define a linear map
Adg : g→ g, Adg(X) := gXg−1.

9
The mapG→ GL(g), g 7→ Adg
is called the Adjoint map.
The Adjoint map is a Lie group homomorphism and thus has an associated Liealgebra homomorphism which fits into a commutative diagram. This Lie algebrahomomorphism is of course the adjoint map (definition 2.8). Hence we have thefollowing commutative diagram.
g End(g)
G GL(g)
ad
exp exp
Ad
Definition 2.16. Let g be a Lie algebra and suppose there exists a compact Liegroup K such that
g ∼= kC,
that is, g is isomorphic to the complexification of the Lie algebra of K. Then g issaid to be reductive.
A reductive Lie algebra with trivial center is said to be semisimple.
There are several characterizations of semisimple Lie algebras. In addition tothe defining property we have given, we state two more characterizations that wecould have chosen as the definition of semisimplicity.
Proposition 2.17. The following statements are equivalent.
(i) g is semisimple (in the sense of definition 2.16);
(ii) the Killing form is non-degenerate on g;
(iii) g decomposes as a Lie algebra direct sum
g =n⊕j=1
gj,
where each gj ⊂ g is simple.
2.2 Representations of Lie Groups
In many ways, representations of Lie groups lies at the heart of this thesis. The orbitmethod is a method for finding representations of Lie groups and as we shall see,it begins with the consideration of orbits of a certain representation (the coadjointrepresentation) of a Lie group. Let us first recall some basic representation theory.For more details, see Hall [9], Kirillov [5] and Berndt [1].

10
Definition 2.18. Let G be a Lie group. A finite-dimensional representation of Gis a Lie group homomorphism
π : G→ GL(V ),
where V is a finite-dimensional vector space with dimension at least 1.A finite-dimensional representation of a Lie algebra g is a Lie algebra homomor-
phismπ∗ : g→ gl(V ),
where gl(V ) is the space End(V ) with the commutator bracket.The vector space V is called the representation space and a representation is said
to be complex (real) if V is a complex (real) vector space.
Example 2.1. Let G be a Lie group and define for each element g ∈ G a map
Cg : G→ G, x 7→ gxg−1.
The differential of this map is the map Adg := (dCg)e ∈ End(g) (for a matrix Liegroup this is simply the map from definition 2.15). The mapping
Ad : G→ End(g), g 7→ Adg
is called the adjoint representation and it is a representation of G with representationspace g.
Definition 2.19. Let π be a Lie group representation acting on the representationspace V . A subspace W ⊂ V is called invariant if
π(g)w ∈ W, for all w ∈ W.
A representation with no invariant nontrivial subspaces is called irreducible.
If V is a vector space and A is an operator on V , we denote the dual space byV ∗ and the dual operator by At.
Definition 2.20. Suppose π is a Lie group representation acting on V . Then thedual (or contragredient) representation π∗ acting on V ∗ is given by
π∗(g) = π(g−1)t.
If π∗ is a Lie algebra representation acting on V , then the dual representation isgiven by
(π∗)∗(X) = −π∗(X)t.
More generally, we consider infinite-dimensional representations of Lie groups.

11
Definition 2.21. Let G be a Lie group, H a Hilbert space and U(H) the group ofunitary operators on H. A unitary representation of G is a continuous homomor-phism
π : G→ U(H),
where U(H) is equipped with the strong operator topology.
Recall that strong continuity of π means that for any v ∈ H, the function
g 7→ π(g)v
is continuous. The vector v ∈ H is called smooth if the function above is infinitelydifferentiable. The subspace of smooth vectors in H is denoted H∞.
Theorem 2.22. Let π : G→ U(H) be a unitary representation and let g = Lie(G).Then
1. The subspace H∞ is dense in H and stable with respect to all operators π(g).
2. For any X ∈ g the operator
A = −iπ∗(X) =: −i ddtπ(exp(tX))
∣∣t=0
with domain H∞ has self-adjoint closure.
3. If G is connected, then the representation π is completely determined by therepresentation π∗ of g in H∞ defined above. In particular, for any v ∈ H∞ wehave
π(exp(tX))v = eitAv.
See the appendix about representation theory in Kirillov [5] for a proof.When dealing with classification problems in representation theory, we work with
equivalence classes of representations rather than representations themselves. Herewe are interested in unitary representations of Lie groups, so the following is theappropriate equivalence relation to work with. Two unitary representations π andπ of a Lie group G on representation spaces V and V are equivalent if there existsa unitary transformation ϕ : V → V such that the following diagram commutes forall g ∈ G.
V V
V V
π(g)
ϕ ϕ
π(g)
Definition 2.23. Given a Lie group G, we define its unitary dual G as the set ofequivalence classes of unitary representations of G.

12
Suppose we have a locally compact topological group G and a subgroup H forwhich we have a representation π0 on some space H0. The representation induces arepresentation
IndGHπ0
of G on a space of functions φ : G→ H0 satisfying a certain functional equation. Todefine this representation, we need some background from measure theory. Recallthat the σ-algebra generated by the open sets of G is called the Borel algebra. Foran element S of the Borel algebra and g ∈ G, the left translate of S is the set
gS = gs : s ∈ S
and the right translate of S is
Sg = sg : s ∈ S.
A measure µ is called left- (resp. right-) invariant if µ(gS) = µ(S) (resp. µ(Sg) =
µ(S)). If µ is both left- and right-invariant it is simply called invariant.
Theorem 2.24 (due to A. Haar). On any locally compact topological group G withcountable basis for the topology, there exists a non-trivial left-invariant measure (andsimilarly a right-invariant measure). Up to multiplication by a positive constant thismeasure is unique and it is called a left- (resp. right-) Haar measure.
Definition 2.25. Let G be a locally compact topological group. Then the modularfunction of G is the continuous group homomorphism
∆G : G→ R+
such that for a right-Haar measure µ and every Borel set S
µ(g−1S) = ∆G(g)µ(S).
By Haar’s theorem, the modular function is well-defined. The group G is calledunimodular if ∆G ≡ 1, or equivalently if the Haar measure is invariant.
Now, let G be a unimodular, connected, matrix group. Let H be closed subgroupand let K be a closed, unimodular subgroup such that the map
H ×K → G, (h, k) 7→ hk
is a homeomorphism. Let π0 be a representation of H on the Hilbert space H0. LetH be the space of functions φ : G→ H0 satisfying the functional equation
φ(hg) = ∆H(h)1/2π0(h)φ(g),

13
for all h ∈ H and g ∈ G, and the condition
φ|K ∈ L2(K).
We define a norm for H by
|φ|2H :=
∫K
|φ(k)|K |2H0dk
and a scalar product by ⟨φ, φ
⟩:=⟨φ|K , φ|K
⟩.
Definition 2.26. The representation of G induced by π0 is the representation
π = IndGHπ0
on the space H, given by(π(g′)φ)(g) = φ(gg′).
We remark that if π0 is unitary, then so is IndGHπ0.This approach is certainly not the most general one, but for our purposes it shall
suffice. The reader who wants more generality may consult Kirillov [5] or Berndt[1].
3 Mechanics and Quantisation
3.1 Classical Mechanics
Classical mechanics is a theory in physics which describes the motions of macro-scopic objects. Historically, it began with what is now known as Newtonian me-chanics which utilized calculus to describe the motion of bodies influenced by forces.Later more sophisticated methods led to reformulations known as Lagrangian, andHamiltonian mechanics. In Lagrangian mechanics we have the manifold Q calledthe configuration space consisting of points q describing the position of a particle. InHamiltonian mechanics we consider the so called phase space, which is the cotangentbundle T ∗Q of the configuration space, consisting of the position q and momentum p
of a particle. We shall see that the phase space is canonically a symplectic manifold.Smooth functions on the phase space are called classical observables. In a classicalmechanical system, the energy of that system is the sum of the potential energy andthe momentum. The energy of a system is given by the Hamiltonian H(q, p), whichis a function on the phase space, i.e. a classical observable. The dynamics of thesystem is given by Hamilton’s equations
qi =dqidt
=∂H
∂pi, pi =
dpidt
= −∂H∂qi
. (1)

14
Example 3.1. Suppose that the energy of a physical system is constant, that is
H(q, p) = C.
Then by Hamilton’s equations (1), q = 0 and p = 0 and thus q(t) = q0 and p(t) = 0.This is interpreted, of course, as nothing is happening in the system.
Example 3.2. In a system consisting of a particle with mass m (considered as apoint in R3) on which a force field with potential V (q) acts, the Hamiltonian is
H(q, p) =3∑i=1
p2i
2mi
+ V (q).
By Hamilton’s equations we have qi = pimi
and pi = −∂iV (q) = Fi. Differentiating qiyields
qi =pimi
=−∂iV (q)
mi
=Fimi
.
The second time derivative of the position is acceleration, denoted q = a. Rearrang-ing the equation above, we have derived
Fi = mai,
which is the familiar equation first derived by I.Newton, albeit through an entirelydifferent reasoning.
We can interpret this Hamiltonian formalism geometrically. The Hamiltonianvector field is the vector field
XH = (∇pH,−∇qH)
on T ∗Q. A curve γ(t) = (q(t), p(t)) is an integral curve for XH if
γ = (q, p) = (∇pH,−∇qH).
This is just the assertion that γ fulfills Hamilton’s equations.
3.2 Symplectic Geometry
Another interpretation is the symplectic interpretation. Let us first recall some basicsymplectic geometry.
Definition 3.1. A symplectic manifold is a differentiable manifold M equipped witha differential form ω ∈ Ω2(M), which is closed and non-degenerate, i.e.
1. dω = 0;
2. If ω(X, Y ) = 0 for all Y ∈ Γ(M), then X = 0.

15
Note that since ω is a 2-form, it is anti-symmetric, that is, for all X, Y ∈ Γ(M)
ω(X, Y ) = −ω(Y,X).
If we pick a basis on TpM , ωp is given by an invertible matrix
[ωp] = A(p) ∈ GL(dimM,R).
The matrix A(p) is skew-symmetric, that is
A(p)t = −A(p),
so that we seedet(A) = det(−At) = (−1)dimM det(A).
Hence, a symplectic manifold has even dimension.On T ∗Q we have the canonical 1-form
α =∑
qidpi
and the exterior derivative of α is called the symplectic form
ω = dα =∑
dqi ∧ dpi.
Note that ω ∈ Ω2(M) is closed and non-degenerate, so (T ∗Q,ω) is a symplecticmanifold. This is the sense in which T ∗Q has a canonical symplectic structure.
We remark that this seemingly very special canonical form is in fact very general,this is summarized in a theorem due to G. Darboux
Theorem 3.2. On a symplectic manifold (M,ω) there exists a neighborhood U anda C∞ function
ϕ : U → R2k
such that
ω|U = ϕ∗
(k∑j=1
dqj ∧ dpj
).
Recall that given a vector field X we have the contraction with an r-form α (alsoknown as the interior product), denoted
Xyα.
This can be considered as a mapping
Xy : Ωr(M)→ Ωr−1(M).

16
A characteristic property of the Hamiltonian vector field XH is that
XHyω =∑ ∂H
∂pidpi +
∂H
∂qidqi = dH.
Hence a curve γ on T ∗Q satisfies Hamilton’s equations if it is an integral curve to avector field X such that
Xyω = dH. (2)
Finally, we briefly consider the Poisson interpretation.
Definition 3.3. Let f and g be two smooth functions with coordinates (q, p), thenthe Poisson bracket is defined as
f, g :=n∑i=1
∂f
∂qi
∂g
∂pi− ∂f
∂pi
∂g
∂qi. (3)
Then Hamilton’s equations become
∇pH = q,H, ∇qH = p,H.
Indeed, we have
qj, H =n∑i=1
∂qj∂qi
∂H
∂pi− ∂qj∂pi
∂H
∂qi=∂H
∂pj
and
pj, H =n∑i=1
∂pj∂qi
∂H
∂pi− ∂pj∂pi
∂H
∂qi= −∂H
∂qj.
We can also express the Poisson bracket in terms of Hamiltonian vector fields.
Definition 3.4. Let f, g ∈ C∞(M), and let Xf be the Hamiltonian vector fieldassociated with f . Then the Poisson bracket is
f, g := Xg(f).
Lemma 3.5. The Poisson bracket can be expressed in terms of the symplectic formas
ω(Xf , Xg) = f, g.
Proof. We have
f, g = Xg(f) = df(Xg) = (Xfyω)(Xg) = ω(Xf , Xg).

17
One can furthermore show that
[Xf , Xg]yω = −df, g,
(see Berndt [2]) from which it follows that
[Xf , Xg] = Xg,f. (4)
We also note that the space C∞(M) can be equipped with the structure of a Liealgebra.
Proposition 3.6. The space C∞(M) equipped with the Poisson bracket forms a Liealgebra.
Proof. We know of course already that C∞(M) is a vector space, so we only haveto verify that the Poisson bracket is a Lie bracket. Bilinearity follows immediatelyfrom the definition of Hamiltonian vector fields. By lemma 3.5, skew-symmetryfollows from skew-symmetry of ω. The Jacobi identity for the Poisson bracket canbe written
dω(Xf , Xg, Xh) = 0
and thus follows from the fact that ω is closed.
3.3 Quantisation
When the objects under consideration are small enough classical mechanics is nolonger accurate. It then becomes necessary to introduce quantum mechanics. Astate in a quantum mechanical system is represented by a one-dimensional subspaceof a Hilbert space H, and the observables are self-adjoint operators on H.
In physics, quantisation is a way of assigning a self-adjoint operator on a Hilbertspace to a classical observable. The operators on this Hilbert space become theobservables in the associated quantum mechanical system. Quantisation is howevera purely mathematical process. The inspiration for quantisation may come fromphysics, but there are also purely mathematical applications. In this thesis we willsee how to use quantisation to find irreducible representations of Lie groups.
There are, of course, many ways to simply assign an operator to a function and so,some restrictions are in order. Dirac formulated conditions which guarantee that theassigned operators form a Hilbert space representation of the classical observables.
Definition 3.7 (The Dirac quantisation conditions). The assignment of an operatora to a classical observable a : M → R should satisfy the following conditions.
(Q1) The map a 7→ a is linear;
(Q2) If a is constant, then a is the corresponding multiplication operator;

18
(Q3) [a1, a2] = −ih a1, a2,
where [·, ·] is the commutator, ·, · is the Poisson bracket and h is Planck’s constant.
We remark that the fact that Planck’s constant appears in (Q3) only matters forphysical applications. When we make use of quantisation to find representations ofLie groups we will assume that h = 1.
As an example we consider the Weyl quantisation. Let a(q, p) be a function onthe phase space T ∗M . The Weyl quantisation of a(q, p) is the operator
a(q, p)Weyl7−→ aW (q,D)f(q) =
1
(2πh)n
∫∫a
(q + ξ
2, p
)ei(q−ξ)p/hf(ξ)dξdp.
If a(q, p) is real-valued, the operator aW (q,D) is self-adjoint in the sense that if
〈f, g〉L2 =
∫fgdq,
then ⟨aW (q,D)f, g
⟩L2 =
⟨f, aW (q,D)g
⟩L2 .
Let H be a Hamiltonian, then Weyl quantisation yields the corresponding self-adjoint operator HW . In Schrödinger’s picture of quantum mechanics the time-development of wave functions is given by ψ(t) = U(t)ψ0, where U(t) is the unitaryoperator
U(t) = e−ithHW
.
Taking the time-derivative yields Schrödinger’s equation
ih∂ψ
∂t= HWψ.
This concludes our inspiring, though brief, tour through the realm of physics.There is a lot to be said about the difficulties that arise when one is trying to con-struct a physically feasible quantisation, but we will not concern ourselves with thathere. Instead we turn our attention to geometric quantisation and its applicationsto pure mathematics.
4 Prequantisation
Our goal is to construct unitary representations of Lie groups. For that we needfirst of all a representation space. Furthermore, we need to put restrictions on thisrepresentation space so that it becomes small enough. N. Woodhouse gives a nicediscussion on what spaces are appropriate to consider in the chapter on prequan-tisation in [3]. We will construct representation spaces by first constructing linebundles over symplectic manifolds and consider smooth sections of these bundles.

19
The arising Hilbert spaces are far to big for our purposes, but we set that problemaside for the next section.
4.1 Vector Bundles
Definition 4.1. A vector bundle of rank n over a manifold M is a triple
Eπ→M
where E is called the total space, π is a (differentiable) projection map, and each fiberEx = π−1(x), for x ∈ M , is an n-dimensional (real) vector space. Furthermore,E is required to be locally trivial, i.e. for each x ∈M there exists a neighborhood Uand a diffeomorphism
ϕ : π−1(U)→ U × Rn
such that for every y ∈ Uϕ|Ey : Ey → y × Rn
is a vector space isomorphism. A pair (ϕ,U) of such a diffeomorphism and neigh-borhood is called a bundle chart.
In the definition above we can replace all Rn with Cn to get complex vectorbundles. In the special case when n = 1, a vector bundle is called a line bundle. Inthis thesis a line bundle will mean a complex line bundle, unless stated otherwise.
Let E π→M be a vector bundle of rank n, cover M with open sets Ujj∈J overwhich E is trivial and let
ϕj : π−1(Uj)→ Uj × Rn
be the local trivializations. Then on Uj ∩ Uk 6= ∅ we have transition maps
ψkj : Uj ∩ Uk → GL(n,R)
defined by the relation
ϕk ϕ−1j (x, v) = (x, ψkj(x)v).
Given the transition maps, we can reconstruct the vector bundle. Indeed, we havethe following theorem (see Jost [4]).
Theorem 4.2.E =
⋃j∈J
(Uj × Rn)/ ∼
where the union is disjoint, and the equivalence relation ∼ is defined by
(x, v) ∼ (y, w)⇔ x = y and w = ψkjv.

20
Again, we may exchange the Rn for Cn in the case of complex vector bundles.Given vector spaces V and W , we can construct the dual space V ∗, the direct
sum V ⊕W , and the tensor product V ⊗W . By doing these constructions fiberwise,we can construct new vector bundles from existing ones. Note that the possibilityof constructing the dual space and the tensor product gives us a bundle of homo-morphisms, namely
Hom(V,W ) = W ⊗ V ∗.
A section of a vector bundle E π→M is a map
s : M → E
such that π(s(x)) = x, for all x ∈M .
Remark 4.3. Note that by a section we will always mean a smooth section, unlessstated otherwise.
The space of sections of E is denoted Γ(E). We will use the special notation
Γ(M) := Γ(TM)
for the space of vector fields on M . We will also use the notation
Ωr(E) = Γ(E ⊗ Λr(T ∗M))
for E-valued r-forms and the special notation
Ωr(M) := Ωr(T ∗M)
for differential r-forms on M . Recall that for any X, Y ∈ Γ(M), we have the Liebracket
[X, Y ] := X Y − Y X.
For differential forms θ ∈ Ωr(M), we have the Lie derivative
LXθ := Xydθ + d(Xyθ).
The exterior derivative of an r-form θ can be written explicitly as
dθ(X0, · · · , Xr) =r∑i=0
(−1)iXiθ(X0, · · · , Xi−1, Xi+1, · · · , Xr)
+∑
06i<j6r
(−1)i+jθ([Xi, Xj] , X0, · · · , Xi−1, Xi+1, · · · , Xj−1, Xj+1, · · · , Xr).

21
In particular, for θ ∈ Ω2(M) we have the formula
dθ(X, Y, Z) = Xθ(Y, Z)− Y θ(X,Z) + Zθ(X, Y )
− θ([X, Y ] , Z) + θ([X,Z] , Y )− θ([Y, Z] , X).(5)
On a vecor bundle we can define, loosely speaking, a way to relate the fiberswith each other.
Definition 4.4. A connection ∇ on a vector bundle E π→M is a linear map
∇ : Γ(E)→ Γ(E ⊗ T ∗M)
such that for all f ∈ C∞(M) and s ∈ Γ(E)
∇(fs) = f∇(s) + s⊗ df.
This extends to a map
∇ : Ωr(E)→ Ωr+1(E),
such that for all s ∈ Γ(E) and α ∈ Ωr(M)
∇(s⊗ α) = (∇s) ∧ α + s⊗ dα.
Using this extension we can define the curvature of a connection.
Definition 4.5. The curvature of a connection ∇ is the operator
∇2 = ∇ ∇ : Γ(E ⊗ T ∗M)→ Ω2(E).
The curvature ∇2 is a 2-form with values in End(E), i.e. a section of the bundle
Λ2(T ∗M)⊗ End(E).
If X, Y ∈ Γ(M) and s ∈ Γ(E), we may write
∇2(X, Y )s = [∇X ,∇Y ] s−∇[X,Y ]s. (6)
Line bundles is of special interest for us, so we will recall a few important prop-erties, many of these (with slight conventional modifications) can be found in Wood-house [3], but we give significantly more details here. On a line bundle L→M , anylocal trivialization (U,ϕ) is determined by the section
σ = ϕ−1(·, 1).
In this trivialization, the potential 1-form θ ∈ Ω1(U) of the connection is character-

22
ized by∇σ = θσ.
Every section on L is of the forms = fσ,
where f is a complex-valued function. Hence the so called covariant derivative isgiven by
∇Xs := Xy∇s = (X(f) +Xy θf)σ.
If we identify a section s = fσ with the function f we may write
∇ = d+ θ.
Then since
(d+ θ)(df + fθ) = d2f + θ ∧ df + fdθ + df ∧ θ + θ ∧ θ = dθ
the curvature of ∇ is∇2 = dθ
and we can easily verify formula (6) in this case. Indeed, we have
[∇X ,∇Y ] s−∇[X,Y ]s
= (X+θ(X))(Y (f)+θ(Y )f)σ−(Y+θ(Y ))(X(f)+θ(X)f)σ−([X, Y ] (f)+θ([X, Y ])f)σ
= (X(θ(Y ))f+θ(Y )X(f)+θ(X)Y (f)−Y (θ(X))f+θ(X)Y (f)+θ(Y )X(f)−θ([X, Y ])f)σ
= (X(θ(Y ))− Y (θ(X))− θ([X, Y ]))s = dθ(X, Y )s.
Given two trivializations (Uj, ϕj) and (Uk, ϕk) with corresponding sections σjand σk the transition function cjk is the function such that
σk = cjkσj
on Uj ∩ Uk.We notice that the endomorphism bundle of a line bundle L→M is trivial, i.e.
End(L) ∼= C×M . Knowing this, together with the natural identification
End(L) = L⊗ L∗
we see that L∗ is an ”inverse w.r.t. the tensor product”. This fact can also be provenin terms of transition functions. Indeed, if the transition functions of L are ϕij, thenthe transition functions of L∗ are ϕ−1
ij and the transition functions of L⊗ L∗ are
ϕijϕ−1ij = 1.

23
Given a curve γ : [0, 1]→M , we can lift γ to a section along γ, i.e. a section
s : [0, 1]→ L
such that π(s(t)) = γ(t). Suppose γ has tangent vector γ. Then the covariantderivative is
∇γs =
(df
dt+ γyθ
)s,
(where s = fσ). If ∇γs = 0, then s is said to be parallel along γ. A parallel sectionalong γ is uniquely determined by its initial value s(0), and this section is called theparallel transport along γ.
Definition 4.6. Let γ : [0, 1]→ M be a closed curve and suppose that s is parallelalong γ. The holonomy of the connection ∇ is the complex number ξ ∈ C such that
s(1) = ξs(0).
The holonomy is independent of the parametrization of γ, the section s and thechoice of base point γ(0). Furthermore, if there exists a smooth surface S ∈M suchthat γ = ∂S, then
ξ = ei∫S dθ.
Definition 4.7. An Hermitian structure on a line bundle L is an Hermitian innerproduct (·, ·) on each fiber such that the function
L→ C, v 7→ (v, v)
is smooth.
An Hermitian structure is said to be compatible with a connection ∇ if for allsections s and s′, and for all (real) vector fields X, we have
Xyd(s, s′) = (∇Xs, s′) + (s,∇Xs
′).
If L has local trivializations (Uj, ϕj) such that the transition functions have unitmodulus, i.e.
|cjk| = 1
and the potential forms θj satisfy θj = −θj, then L can be equipped with an Her-mitian structure compatible with ∇ such that
(σj, σj) = 1
for all j. Indeed,(σk, σk) = |cjk|(σj, σj)

24
and(∇Xσj, σj) + (σj,∇Xσj) = (Xyθj +Xyθj) = 0 = Xyd(σj, σj).
The vector bundle End(L) has the subbundle End(L, (·, ·)) consisting of skew-Hermitian maps and we have
End(L, (·, ·)) ∼= M × iR.
If the connection ∇ is compatible with an Hermitian structure, then the curvature2-form of ∇ takes its values in End(L, (·, ·)). Hence, the 2-form
−i∇2 ∈ Ω2(M)
is just a a real-valued 2-form.
4.2 The Prequantum Line Bundle
We will construct a special line bundle over a symplecic manifold (M,ω). ThisHermitian line bundle will have a connection ∇ whose curvature 2-form is equalto −iω. Moreover the Hermitian structure of the line bundle and ∇ are to becompatible. This line bundle is called a prequantum line bundle. It is possible toformulate precisely not only when a prequantum line bundle exists, but also how toparametrize the inequivalent choices of such bundles. However, we begin by givinga seemingly slightly weaker condition.
Definition 4.8. A symplectic manifold (M,ω) is said to be quantisable, if the formω is integral. The integrality condition means that for any closed, oriented 2-surfaceS ⊂M ∫
S
ω ∈ 2πZ.
To investigate what this means, we begin with a lemma due to H. Poincaré.
Lemma 4.9. If U ⊂ M is open and contractible, then every closed r-form on U isexact.
Let us try to directly construct a prequantum line bundle. Let U = Ujj∈J bean open cover of M such that each Uj is contractible. Then on each Uj, there is a1-form βj, such that
ω|Uj = dβj.
Also, on Uj ∩ Uk 6= ∅ which are contractible we have
d(βj − βk) = ω|Uj∩Uk − ω|Uj∩Uk = 0,
so βj − βk is closed and therefore exact on Uj ∩ Uk. Thus there exists functionsfjk : Uj ∩ Uk → R such that
dfjk = βj − βk.

25
Note that fjk = −fkj. On contractible intersections Uj ∩ Uk ∩ Ul 6= ∅ we define afunction ajkl by
fjk + fkl + flj = 2πajkl.
However, we notice that
dajkl =1
2πd(fjk + fkl + flj) =
1
2π(βj − βk + βk − βl + βl − βj) = 0
so that ajkl is actually constant. The statement that M is quantisable now simplymeans that ajkl ∈ Z (to see why, we need to introduce Čech cohomology groups, seedefinition 4.13).
Now letcjk = eifjk ,
so thatdcjk = icjk(βj − βk)
and for ajkl ∈ Z on Uj ∩ Uk ∩ Ul 6= ∅, we have
cjkcklclj = ei(fjk+fkl+flj) = e2πiajkl = 1.
Hence, cjk are transition functions on some line bundle B over M , which we canreconstruct from these functions. Suppose now that M is simply connected. Takesome point in M and choose a closed curve γ passing through this point. Since Mis simply connected, there exists a surface S such that ∂S = γ. Assume that S iscontained in Uj for some j (if it is not, we simply choose a subdivision of S so thateach piece is contained in some Uj). Then
ei∮γ βj = ei
∫S ω
and we can use this to reconstruct a connection ∇ on B with curvature ω, since theholonomy of such a connection is
ξ = ei∫S ω.
Furthermore, since |cjk| = 1 for all j, k and the forms βj are real, there existsan Hermitian structure on B which is compatible with ∇. The bundle B with thisconnection∇ and compatible Hermitian structure is called a prequantum line bundle.
The integrality condition as we have stated it is a necessary condition for aprequantum line bundle to exist. However for non-simply connected manifolds, itis much harder to directly construct prequantum line bundles as there are differentpossibilities for the holonomy of∇ around loops that cannot be contracted to points.Therefore, we reformulate the integrality condition in terms of cohomology groupswhich makes things slightly more abstract, but easier to deal with.

26
4.3 Cohomology
Let us very briefly recall some basic cohomology theory. We begin with de Rhamcohomology, a cohomology theory based on differential forms. For practicality, wealso introduce Čech cohomology groups which are based on intersection propertiesof open covers, as these are generally easier to compute.
4.3.1 de Rham Cohomology
Let M be a smooth manifold and define the de Rham cochain complex as
0→ Ω0(M)d→ Ω1(M)
d→ · · · d→ ΩdimM(M)→ 0
where d is the exterior derivative. If we write
· · · → Ωk−1(M)dk−1→ Ωk(M)
dk→ Ωk+1(M)→ · · ·
then the closed k-forms on M is ker(dk) and the exact k-forms on M is Im(dk−1).Note that the property d d = 0 implies that
Im(dk−1) ⊆ ker(dk).
Now we can define the de Rham cohomology groups.
Definition 4.10. The kth de Rham cohomology group is defined as
Hk(M) = ker(dk)/Im(dk−1).
de Rham cohomology is dual to simplicial homology in the following sense: LetHk(M) be the kth homology group and let [c] ∈ Hk(M) be a cycle. Then Hk(M)
can be identified with the dual of Hk(M) via the mapping
[c] 7→∫c
α,
for [α] ∈ Hk(M). This is the content of de Rham’s theorem. We will denote thesubgroup of classes of k-forms [α] such that for any k-cycle c∫
c
α ∈ Z
by Hk(M,Z). This subgroup is (by the de Rham isomorphism) isomorphic to thesubgroup Hk(U,Z) of the kth Čech cohomology group Hk(U,R) described below (seeWoodhouse [3] for further details).

27
4.3.2 The Čech Cohomology Groups
Let U = Uii∈I be an open cover of M .
Definition 4.11. A k-cochain, relative to U , is a collection f := fi1,··· ,ik+1 of
functions fi1,··· ,ik+1(of some specified type) defined on
Ui1 ∩ · · · ∩ Uik+1
such thatfi1,··· ,ik+1
=1
(k + 1)!
∑σ∈Sk+1
sign(σ)fσ(i1),··· ,σ(ik+1)
and such that f contains only one function fi1,··· ,ik+1for each ordered set of k + 1
indices such thatUi1 ∩ · · · ∩ Uik+1
6= ∅.
We define the Čech coboundary operator, acting on k-cochains, by
δf := (δf)i1,··· ,ik+2,
where
(δf)i1,··· ,ik+1:= (k + 2)
k+2∑m=1
(−1)m−1fi1··· ,im−1,im+1,··· ,ik+2|Ui1∩···∩Uik+2
.
Note that δ maps k-cochains to (k + 1)-cochains and that δ2 = 0.
Definition 4.12. A k-cochain f is called a k-cocycle if δf = 0 and called a k-coboundary if there exists a (k − 1)-cochain g such that f = δg. The groups ofk-cocycles and k-coboundaries are denoted by Zk(U) and Ck(U), respectively.
Definition 4.13. The kth Čech cohomology group is the group
Hk(U) := Zk(U)/δCk−1(U).
If the functions fi1,··· ,ik+1are specified to be locally constant, taking values in
some abelian group A, we denote the kth Čech cohomology group by
Hk(U,A).
4.4 The Integrality Condition
We are now ready to formulate the integrality condition.
Definition 4.14 (The Integrality Condition). Let (M,ω) be a symplectic manifold.Then ω is integral iff (2π)−1ω determines a class in H2(M,Z).

28
This definition allows us to formulate precisely when a prequantum line bundleexists.
Theorem 4.15. Suppose (M,ω) is a symplectic manifold. Then there exists a linebundle B →M with connection ∇ and compatible Hermitian structure such that thecurvature is −iω iff the integrality condition holds.
In fact, even more can be said about the inequivalent choices of B and ∇ whenM is not simply connected. These are parametrized by the group H1(M,S1). SeeWoodhouse [3] (proposition 8.3.1 ).
Before we construct the prequantum Hilbert space, let us take a moment toreflect on what we have done so far. Given a symplectic manifold (M,ω) we denoteby P(M) the collection of triples (L,∇, (·, ·)) where L is a line bundle over M withconnection ∇ and compatible Hermitian structure (·, ·). Then the curvature of ∇yields a mapping
P(M)→ Ω2(M), (L,∇, (·, ·)) 7→ −i∇2.
What we are trying to achieve is to find an ”inverse” to this mapping. However, themap is in general not injective and neither is every symplectic form in the image.The integrality condition has given us a (partial) solution to this problem. It tellsus when a symplectic form lies in the image of this map.
4.5 The Prequantum Hilbert Space
Now we can construct a first attempt at a representation space, the so called pre-quantum Hilbert space, consisting of certain smooth sections of the prequantum linebundle.
Let (M,ω) be a symplectic manifold of dimension 2n and suppose ω satisfiesthe integrality condition. Then there exists a prequantum line bundle B →M withconnection ∇ and compatible Hermitian structure (·, ·). We will denote by Γ0(B)
the space of compactly supported sections of B, i.e.
Γ0(B) := s ∈ B : supp(s) is compact.
Consider, for s1, s2 ∈ Γ0(B), the integral∫M
(s1, s2)εω,
where εω is the Liouville form
εω :=1
n!ωn =
1
n!ω ∧ · · · ∧ ω.
Since s1 and s2 have compact support, we have (s1, s2) ∈ C∞0 (M) and hence the

29
integral converges. We equip Γ0(B) with the inner product defined by
〈s1, s2〉 :=
∫M
(s1, s2)εω.
Definition 4.16. Given a prequantum line bundle (B,∇, (·, ·)), the Hilbert space
(L2B, 〈·, ·〉) := the completion of (Γ0(B), 〈·, ·〉)
is called the prequantum Hilbert space.
Let f ∈ C∞(M) (i.e. f is a classical observable if M is a phase space), then theoperator f on L2
B corresponding to f is
s 7→ f s = i∇Xf s+ fs. (7)
This is the so called Kostant-Souriau prequantum operator. It is an unbounded and,as we shall see, symmetric operator defined on a domain D(f) ⊂ L2
B.To see why this is an appropriate assignment of an operator to a function, let us
check that it satisfies Dirac’s quantisation conditions.
Lemma 4.17. Let B → M be a prequantum line bundle. The operator f satisfiesDirac’s quantisation conditions if the map
C∞(M)→ Hom(Γ(B),Γ(B)), f 7→ f
is linear and satisfies the condition[f , g]
= −if, g, (8)
for all f, g,∈ C∞(M).
Proof. Since we have assumed that h = 1, (Q1) and (Q3) are clearly satisfied. Since
Xfyω = df
it is clear that Xf = 0 if f is constant. Hence, for f constant, the operator f is justmultiplication by f , so (Q2) is satisfied.
Now we can show that the assignment of operator as in (7) is appropriate.
Proposition 4.18. The map
C∞(M)→ Hom(Γ(B),Γ(B)), f 7→ f := i∇Xf + f
satisfies Dirac’s quantisation conditions.

30
Proof. We need to check that the conditions of lemma 4.17 are satisfied. It is clearthat the map is linear. Let f, g ∈ C∞(M) be arbitrary functions. We compute[
f , g]
=[i∇Xf + f, i∇Xg + g
]= −
[∇Xf ,∇Xg
]+ i[∇Xf , g
]+ i[f,∇Xg
]+ [f, g]
= −[∇Xf ,∇Xg
]+ i[∇Xf , g
]+ i[f,∇Xg
]Consider the expression
[∇Xf , g
]. Let s ∈ Γ(B) be an arbitrary section. Then[
∇Xf , g]s = ∇Xf (gs)− g∇Xf s
= g∇Xf s+Xf (g)s− g∇Xf s
= Xf (g)s
= g, fs.
In the same manner we see that [f,∇Xg
]= g, f.
Since the curvature of ∇ on B is −iω, we have for any X, Y ∈ Γ(M)
−iω(X, Y ) = [∇X ,∇Y ]−∇[X,Y ]
and hence[∇X ,∇Y ] = ∇[X,Y ] − iω(X, Y ).
Utilizing this, we find[f , g]
= · · · = −[∇Xf ,∇Xg
]+ i[∇Xf , g
]+ i[f,∇Xg
]= −∇[Xf ,Xg] + iω(Xf , Xg) + 2ig, f
= −∇Xg,f + if, g+ 2ig, f= ∇Xf,g − if, g
= −if, g.
Moreover, we have the following proposition.
Proposition 4.19. The map
C∞(M)→ Hom(Γ0(B),Γ0(B)), f 7→ f := i∇Xf + f
is symmetric, i.e.〈f s1, s2〉 − 〈s1, fs2〉 = 0,

31
for all s1, s2 ∈ Γ0(B).
Proof. Since ∇ is compatible with the Hermitian structure (·, ·), we have
〈∇Xf s1, s2〉+ 〈s1,∇Xf s2〉 =
∫M
[(∇Xf s1, s2) + (s1,∇Xf s2)
]εω
=
∫M
Xf (s1, s2)εω.
Since the Lie derivative has the property
LX(α ∧ β) = (LXα) ∧ β + α ∧ (LXβ)
for any differential forms α, β and any vector field X, and since
LXfω = Xfydω + d(Xfyω) = d(df) = 0,
we haveLXf εω = 0.
Hence,
LXf [(s1, s2)εω] =[LXf (s1, s2)
]εω + (s1, s2)LXf εω =
[LXf (s1, s2)
]εω = Xf (s1, s2)εω.
By our definition of the Lie derivative, we have for any differential 2n-form θ on Mthat
LXθ = Xydθ + d(Xyθ) = d(Xyθ),
since dθ = 0. By Stokes theorem, we have∫M
d (Xfy(s1, s2)εω) =
∫∂M
Xfy(s1, s2)εω = 0.
Putting things together, we find
〈∇Xf s1, s2〉+ 〈s1,∇Xf s2〉 =
∫M
[(∇Xf s1, s2) + (s1,∇Xf s2)
]εω
=
∫M
Xf (s1, s2)εω
=
∫M
LXf [(s1, s2)εω]
=
∫M
d (Xfy(s1, s2)εω) = 0.
Now notice that
〈fs1, s2〉 − 〈s1, fs2〉 = f(〈s1, s2〉 − 〈s1, s2〉) = 0,

32
so that
〈(i∇Xf + f)s1, s2〉 − 〈s1, (i∇Xf + f)s2〉 = i(〈∇Xf s1, s2〉+ 〈s1,∇Xf s2〉) = 0.
This concludes the proof.
Remark 4.20. If the Hamiltonian vector field Xf is complete, i.e. its integralcurves φXf (t) is defined for all t ∈ R, one can extend the operator f to a self-adjointoperator by Stone’s theorem. See Hall [8].
5 Quantisation
5.1 Polarization
To define polarizations we need a few preparatory definitions.
Definition 5.1. Let V be a vector space with a symplectic form ω. A subspace L issaid to be Lagrangian if
1. L is isotropic, i.e. ω(u, v) = 0 for all u, v ∈ L;
2. L is maximally isotropic, i.e. for any isotropic L′ such that L ⊂ L′ ⊂ V wehave L = L′.
A Lagrangian subspace L ⊂ V always has dimension 12
dimV .We may extend this definition to immersed submanifolds as follows.
Definition 5.2. Let (M,ω) be a symplectic manifold. An immersed submanifold Nis said to be Lagrangian if for all p ∈ M , its tangent space TpN is a Lagrangiansubspace of TpM (with the symplectic form ωp).
Definition 5.3. A real distribution P on a manifold M is a subbundle P ⊂ TM
of the tangent bundle. A complex distribution is a subbundle P ⊂ TCM of thecomplexified tangent bundle.
Given a distribution P on M , then a, immersed submanifold N ⊂ M is calledan integral manifold of P if for every p ∈ N , we have TpN = Pp. We will denotethe space of integral manifolds of M by M/P . This is not necessarily a smoothmanifold.
Now we define real polarizations.
Definition 5.4. A (real) polarization on a symplectic manifold (M,ω) is a realdistribution P ⊂ TM such that
1. each fiber Pp is a Lagrangian subspace of TpM ;
2. P is integrable, i.e. for any X, Y ∈ Γ(P) we have [X, Y ] ∈ Γ(P).

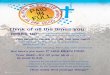
33
π(p)
p
S1
Xp
dπ(Xp)
πdπ
M
Figure 1: The symplectic manifold M = T ∗S1, the canonical projection mapping πand its differential dπ acting on a vector.
Note that some authors call a distribution satisfying (2) in the definition aboveinvolutive. However, by the Frobenius theorem P is involutive if and only if it isintegrable.
Example 5.1. Consider the unit circle S1. Let M = T ∗S1 and note that
M ∼= S1 × R.
Fix coordinates (θ, x) on M . Then the canonical symplectic form ω is given by
ω = dθ ∧ dx.
Let π be the projection mapping
π : T ∗S1 → S1.
Then M has a polarization P given by
P := ker(dπ).
In coordinates, the map dπ is given by
dπ : TM → TS1, Xp = x1∂
∂θ|p + x2
∂
∂x|p 7→ dπ(Xp) := x1
∂
∂θ|p
which can be viewed geometrically as in figure 1. Hence the kernel of this map is
ker(dπ) =
x1
∂
∂θ|p + x2
∂
∂x|p ∈ TM : x1 = 0, x2 ∈ R
.

34
Let us verify that this is indeed a polarization. Fix any p = (θ, x) ∈M . Then Pp isa Lagrangian subspace of TpM . Indeed it is isotropic, since for any Xp, Yp ∈ TpMwe have
ωp(Xp, Yp) = dθ ∧ dx(x2∂
∂x|p, y2
∂
∂x|p) = 0.
It is also maximally isotropic, since dimTpM = 2. A section X ∈ Γ(P) is given incoordinates by
X = x2∂
∂x,
where x2 ∈ C∞(M). Hence, for any X, Y ∈ Γ(P), we have
[X, Y ] = 0 ∈ Γ(P)
so that P is indeed a polarization.This particular example is easy to visualize, but in fact for any manifold N the
kernel of the differential of the projection map from the cotangent bundle T ∗N is apolarization P of T ∗N . This polarization is called the vertical polarization of T ∗Nand in local coordinates
(qi, pi) : T ∗U → Rn × Rn
it is given by
P =
n∑i=1
fi∂
∂pi: fi ∈ C∞(U)
.
Not every manifold admit a real polarization. As an example the 2-sphere S2
has no real polarization since that would imply that it has a nowhere zero vectorfield, which contradicts the ”hairy ball theorem”. We will define the more generalcomplex polarizations, but we need the following definition first.
Definition 5.5. A complex distribution P of a symplectic manifold M is integrableif in some neighborhood U of each point, one has
fk+1, · · · , fl ∈ C∞(U),
where l = rank P and k = dimM , such that their differentials dfk+1, · · · , dfl areindependent and annihilate all complex vector fields X such that Xp ∈ Pp for allp ∈M .
Definition 5.6. A complex polarization of a symplectic manifold (M,ω) is a com-plex distribution P such that
1. each fiber Pp is a Lagrangian subspace of TCM ;
2. for all p ∈M , the space Pp ∩ Pp ∩ TpM has constant dimension;
3. P is integrable.

35
For any polarization P of M , we have two special distributions, namely
E := P ⊕ P ∩ TM
andD := P ∩ P ∩ TM.
Clearly, D is an integrable distribution but E might not be. This calls for thedefinition of a particular class of polarizations.
Definition 5.7. A polarization P of M is called strongly integrable if E is inte-grable.
Two distinguished types of strongly integrable polarizations are real polarizationsand the so called Kähler polarizations. We will define and direct our attention toKähler polarizations in the next section. For more details on the more general case,see e.g. Hall [8].
5.2 The Right Hilbert Space
The key idea behind the construction of the Hilbert space suitable for geometricquantisation is to take the prequantum Hilbert space L2
B, a polarization P ofM andconsider the sections in L2
B which are constant along the fibers of P . However, formany polarizations difficulties arise. For example, no such sections may exist. Inthe general theory of geometric quantisation, this has been treated extensively (seee.g. Lerman [7]). We will consider a class of manifolds particularly well suited forgeometric quantisation, namely Kähler manifolds.
Recall that a complex structure on a real vector space V is a linear transformation
J : V → V
such that J2 = −I. A complex structure J on a manifold M is a complex structureJp on each TpM , varying smoothly with p. This may be expressed as the complexdistribution P which is spanned by the vector fields
X − iJX, X ∈ Γ(M)
is integrable.
Definition 5.8. A Kähler manifold is a 2n-dimensional manifold M with a sym-plectic structure ω and a complex structure J which are compatible in the sensethat
g(X, Y ) := 2ω(X, JY ), X, Y ∈ Γ(M)
is a non-degenerate, positive-definite, symmetric tensor.

36
Any (complex) polarization P may be equipped with the Hermitian form
〈Xp, Yp〉 := −4iω(Xp, Yp) (9)
and P is said to be of type (r, s) if this Hermitian form is of sign (r, s), i.e. ifTpM has a basis so that the matrix A, where
〈Xp, Yp〉 = (Xp)tAYp,
is on the form (Ir−Is
).
Definition 5.9. A polarization P of M is a pseudo-Kähler polarization if it is oftype (r, s), with r + s = n. It is a Kähler polarization if it is of type (n, 0), i.e. theHermitian form (9) is positive-definite.
A Kähler polarization on (M,ω) induces a complex structure J making (M,ω, J)
a Kähler manifold. Conversely, any Kähler manifold carries two canonical Kählerpolarizations P and P spanned by
∂
∂zk
and∂
∂zk,
respectively. These are called the holomorphic polarization and the anti-holomorphicpolarization. If (U,ϕ) are local coordinates on (M,ω, J), we can find a functionf ∈ C∞(U,R) such that
ω|U = i∂∂f,
and ifθ = −i∂f,
then θ and θ are symplectic potentials adapted to P and P , respectively.A polarization on (M,ω) singles out a certain class of sections of the prequantum
line bundle B.
Definition 5.10. Let (M,ω) be a symplectic manifold, let P be a polarization ofM , and let (B,∇, 〈·, ·〉) be a prequantum line bundle. A section s ∈ Γ(B) is said tobe polarized, if
∇Xs = 0
for all complex vector fields X such that Xp ∈ Pp for all p ∈M . We will denote thespace of polarized sections by ΓP(B).
Finally, we can construct the sought after Hilbert space. Given a quantizable,symplectic manifold (M,ω), a Kähler polarization P and a prequantum line bundle

37
(B,∇, 〈·, ·〉) yielding the prequantum Hilbert space L2B, we define
HP := L2B ∩ ΓP(B).
This is the Hilbert space we want. It consists of ”square integrable”, polarizedsections of the prequantum line bundle. It is indeed a Hilbert space, since it is aclosed subspace of a Hilbert space. For further details, see Hall [8].
An interesting special case is when M is compact, then HP is finite-dimensional.We end this section by a brief investigation on which functions f ∈ C∞(M) yield
operators on HP . Consider the space
C∞P (M) := f ∈ C∞(M) :[Xf , X
]∈ Γ(P), for all X ∈ Γ(P).
We’ll start by showing that this space is closed under the Poisson bracket and henceforms a Lie algebra.
Proposition 5.11. For any f, g ∈ C∞P (M), we have f, g ∈ C∞P (M).
Proof. Let X ∈ Γ(P). Then[X,Xf,g
]= [X, [Xg, Xf ]] = [[X,Xf ] , Xg] + [[Xg, X] , Xf ] ,
and [Xg, X] , [X,Xf ] ∈ Γ(P) since f, g ∈ C∞P (M). Thus, since Γ(P) is closed underthe Lie bracket, the statement follows.
Now we can modify proposition 4.18 into a ”polarized” version.
Proposition 5.12. The map
C∞P (M)→ Hom(ΓP(B),ΓP(B)), f 7→ f = i∇Xf + f
satisfy the relation [f , g]
= −if, g,
for all f, g ∈ C∞P (M).
Proof. In proposition 4.18 we proved the statement for the Lie algebras C∞(M) andHom(Γ(B),Γ(B)). The map we are considering now is simply the restriction to thesubalgebra C∞P (M), so all we need to show is that
∇X(f s) = 0,
for all X ∈ Γ(P), f ∈ C∞P (M) and s ∈ ΓP(B). We have
∇X(f s) = ∇X(i∇Xf s+ fs) = i∇X(∇Xf s) +∇X(fs).

38
First consider the second term. We have
∇X(fs) = (X(f)s+ f∇Xs) = X(f)s,
since s is polarized. Next, since −iω is the curvature of ∇, we have
∇X(∇Xf s) = −iω(X,Xf )s+∇Xf (∇Xs) +∇[X,Xf ]s = −iω(X,Xf )s,
because s is polarized and f ∈ C∞P (M). Finally we write
−iω(X,Xf )s = i(Xfyω)(X)s
= idf(X)s
= iX(f)s.
Putting everything together we have
∇X(f s) = i∇X(∇Xf s) +∇X(fs) = −X(f)s+ X(f)s = 0,
and we are done!
Let us summarize what we have done so far. Given a symplectic manifold (M,ω)
which is quantisable, that is, for which ω satisfies the integrality condition, we finda prequantum line bundle B with connection ∇ such that the curvature is −iω anda compatible Hermitian structure. The endomorphisms of the sections of B forms aLie algebra, and we have a homomorphism of Lie algebras
C∞(M)→ Hom(Γ(B),Γ(B)), f 7→ f .
The space of sections of B which are ”square integrable”, i.e.∫M
(s, s)εω <∞
forms a Hilbert space, the prequantum Hilbert space L2B, on which the f :s act as
symmetric operators. To make this space smaller, we introduce a polarization P onM . In particular we consider M which admit a Kähler polarization and considerthe space of polarized sections, i.e. the sections s ∈ Γ(B) for which
∇Xs = 0.
We then take as our Hilbert space the subspace of L2B consisting of polarized sections.
The homomorphism f 7→ f then restricts to a homomorphism of Lie algebras be-tween the space of ”polarization preserving” functions on M and the endomorphismspace of the polarized sections.

39
6 The Orbit Method
So far we have given a description of geometric quantisation. Let us now attemptto illustrate the connection between geometric quantisation and the orbit method.We begin by introducing coadjoint orbits, following Berndt [1] but giving signifi-cantly more details. Then we consider how geometric quantisation can yield unitaryrepresentations and compare this consideration with (essentially) Kirillovs’ originalapproach. Finally, we give two examples; the Heisenberg group which is nilpotent(thus Kirillov’s original approach works perfectly) and SU(2) on which we applygeometric quantisation more directly.
6.1 Coadjoint Orbits
Recall the adjoint representation Ad of a Lie group G on its Lie algebra g (as definedin example 2.1).
Definition 6.1. The coadjoint representation Ad∗ of a Lie group G is the dualrepresentation of the adjoint representation Ad, and is given by
Ad∗(g) := Ad(g−1)t.
The representation space of Ad∗ is g∗, the dual of the Lie algebra g.
For any linear functional α ∈ g∗, let < α, · > denote its value
< α,X >:= α(X).
Then we have the following description of Ad∗, in terms of Ad
< Ad∗(g)α,X >=< α,Ad(g−1)X > .
If g is semisimple, then the Killing form B is non-degenerate and we can identify g∗
with g via the mapα 7→ Xα,
where Xα is defined by
α(Y ) = B(Xα, Y ), for all Y ∈ g.
In this case, the description of the coadjoint representation simplifies to
α 7→ Ad(g−1)Xα.
From now on, we will often use the abbreviation
g · α := Ad∗(g)α.

40
Definition 6.2. Let α ∈ g∗. The coadjoint orbit Oα of α is the orbit of α as Gacts on g∗ via the coadjoint representation, i.e.
Oα := G · α.
Recall that the stabilizing group is
Gα = g ∈ G : g · α = α
and that we have the diffeomorphism
Oα ∼= G/Gα
so the coadjoint orbits are homogeneous spaces. If g∗ can be identified with g via anon-degenerate bilinear form (as above) then
Oα = Ad(g)Xα : g ∈ G.
In particular, if G is a matrix Lie group and we identify g∗ with (the matrix space)g, then we have
Oα = g−1Xαg : g ∈ G.
It is an amazing fact that the coadjoint orbits are symplectic manifolds. We willprove this in the special case of semisimple matrix groups. We refer the reader toKirillov [6] for a proof of the general case.
Lemma 6.3. Let G be a Lie group, let M = Oα be the coadjoint orbit of α ∈ g∗
and let gα be the Lie algebra of the stabilizing group. Then the tangent space of Mat α is
TαM ∼= g/gα.
Proof. We have the diffeomorphism
M ∼= G/Gα.
Letπ : G→ G/Gα
be the canonical projection. Notice that π(e) = α (where e is the neutral element inG), indeed the canonical projection corresponds to Ad∗. Hence we have a surjectivemap
dπe : g→ Tα(G/Gα).

41
Consider the commutative diagram.
ker(dπe) g Tα(G/Gα)
g/ ker(dπe)
dπe
ϕ
By the first isomorphism theorem, the map ϕ is an isomorphism (of vector spaces)and we have
g/ ker(dπe) ∼= Tα(G/Gα).
The kernel of π consists of the elements in G such that g · α = α, that is
ker(π) = Gα.
Thus, the kernel of dπe is
ker(dπe) = Te(ker(π)) = TeGα = gα
and we haveTαM ∼= Tα(G/Gα) ∼= g/gα.
Lemma 6.4. Let M = Oα. The so called Kirillov-Kostant form
ωα(X, Y ) := α([X, Y ]),
with X, Y ∈ g, is a well-defined, skew-symmetric, bilinear form on TαM .
Proof. If ωα is well-defined, it is obviously bilinear and skew-symmetric, since theLie bracket is. By the isomorphism
TαM ∼= g/gα
proven in the previous lemma, we can consider elements of TαM as elements on theform X + gα, with X ∈ g. Any representative of the coset X + gα is on the formX + Z, for some Z ∈ gα. By the equality
α([X + Z, Y ]) = α([X, Y ]) + α([Z, Y ])
it is enough to show that
[Z, Y ] = 0, for all Z ∈ gα, Y ∈ g

42
to show that ωα is well-defined. Recall that
[Z, ·] = adZ
and for all Z ∈ gα, we haveexp(Z) ∈ Gα.
Using the relationship between Ad, Ad∗, ad and exp, we have for any β ∈ g∗
(exp(adZ))tβ = (Ad(exp(Z)))tβ = Ad∗(exp(Z)−1)β = β,
since of course also exp(Z)−1 ∈ Gα. Thus,
exp(adZ) = id
and so adZ = 0. In particular adZ(Y ) = [Z, Y ] = 0 for any Y ∈ g.
Now we will show that the coadjoint orbits are symplectic manifolds in the specialcase of semisimple matrix Lie groups.
Theorem 6.5. Suppose G is a semisimple matrix Lie group. The coadjoint orbitM = Oα is a symplectic manifold.
Proof. Since M is a homogeneous space, it is enough to show that the form ωα onTαM is a symplectic form. By lemma 6.4, the form ωα is a well-defined 2-form. SinceG is semisimple, its Lie algebra g has trivial center and thus ωα is non-degenerate.All we need to show is that ωα is closed. Denote the differential of Ad∗ by
dAd∗ =: ad∗.
This is the representation of g on g∗ corresponding to Ad∗. Hence, the vector fieldsX ∈ TαM are spanned by
ad∗(X)α
for X ∈ g. Thus, if we denote the value of α at X by < α,X >, we have
Xα(Y ) =< ad∗(X)α, Y >=< α,−adXY >= α([Y,X]).

43
Let us utilize this and formula (5) for the exterior derivative of a 2-form to compute
dωα(X, Y, Z) = Xωα(Y, Z)− Y ωα(X,Z) + Zωα(X, Y )
− ωα([X, Y ] , Z) + ωα([X,Z] , Y )− ωα([Y, Z] , X)
= Xα([Y, Z])− Y α([X,Z]) + Zα([X, Y ])
− α([[X, Y ] , Z]) + α([[X,Z] , Y ])− α([[Y, Z] , X])
= α([[Y, Z] , X])− α([[X,Z] , Y ]) + α([[X, Y ] , Z])
− α([[X, Y ] , Z]) + α([[X,Z] , Y ])− α([[Y, Z] , X])
= 0.
Remark 6.6. The Kirillov-Kostant form is sometimes written
ωα(α)(ξX(α), ξY (α)) = α([X, Y ]), for X, Y ∈ g, α ∈ Oα, (10)
where ξX is the vector field associated to X acting of smooth functions f on Oα asa differential operator defined by
(ξXf)(α) :=d
dt(f(Ad∗(exp(tX))α)),
(see Berndt [1], section 8.2.4). This is often conventient for computations.
6.2 Unitary Representations from Coadjoint Orbits
Suppose we have a Lie group G, and have determined the coadjoint orbits Oα. Find-ing unitary representations of G now amounts to performing geometric quantisationon ”admissible orbits”. In this context, admissible of course means quantisable, i.e.the Kirillov-Kostant form ωα must satisfy the integrality condition. Take an in-tegral orbit Oα. Equip Oα with a suitable polarization. Take the arising Hilbertspace of square-integrable, polarized sections of a prequantum line bundle over Oαas a representation space. The polarization preserving functions yield symmetricoperators via the Kostant-Souriau prequantum operator, which is a homomorphismof Lie algebras. This will give us a symmetric representation of the Lie algebra g
and lifting this to G gives us a unitary representation of G.If G is not semisimple, it is not as obvious how to translate between geometric
quantisation and the orbit method. For the more general case we take the viewpointof induced representations.
We give an algorithmic description of the orbit method from two points of view.

44
The Orbit Method from the viewpoint of Geometric Quantisation
To simplify this description we restrict ourselves to connected, simply connected,compact Lie groups.Step 1: Take a semisimple Lie group G with Lie algebra g. Find the coadjointorbits Oα and determine the Kirillov-Kostant form ωα on Oα.Step 2: Determine which of the coadjoint orbits Oα are quantisable.Step 3: Choose a (Kähler) polarization P of Oα.Step 4: Construct a prequantum line bunde B over Oα and determine the Hilbertspace HP of square-integrable, polarized sections of B.Step 5: Determine the space C∞P (Oα) of polarization preserving functions on Oαand assign to each f ∈ C∞P (Oα) an operator
f = i∇Xf + f.
Step 6: For n = dim g, find a collection
f1, · · · , fn ∈ C∞P (Oα)
such that fj is a linearly independent set of operators satisfying
[fi, fj
]=
n∑k=1
cijkfk,
where cijk are the structure constants of g. Then fj gives a symmetric represen-tation π∗ of g on HP .Step 7: Lift π∗ to a unitary representation π of G on HP .
The Orbit Method from the viewpoint of Induced Representations
For the more general case we take the point of view of induced representations. Thisis essentially Kirillov’s original approach.Step 1: For each orbit Oα ⊂ g∗, find a real subalgebra n such that
< α, [X, Y ] >= 0 (11)
for all X, Y ∈ n. Equivalently (and importantly), the mapping
X 7→ 2πi < α,X > (12)
defines a one-dimensional representation of n.Step 2: If n satisfies the condition
dim(g/n) =1
2(dim g + dim gα), (13)

45
where gα is the Lie algebra of the stabilizing group, then we say that n is a realalgebraic polarization of α. Analogously, we define a complex algebraic polarizationby extending α to a linear functional on
gC := g⊗ C
and consider complex subalgebras n ⊂ gC satisfying, as in the real case, the con-ditions given by (11) and (13). Given an algebraic polarization n, we say it isadmissible if for any g ∈ Gα, we have
Ad(g)X ∈ n, for all X ∈ n.
These algebraic polarizations are directly related to the polarizations we defined ear-lier in the sense that there is a bijection between the set of G-invariant polarizationsof Oα and the set of admissible algebraic polarizations of α (see Kirillov [5], theorem5 and theorem 5’).Step 3: Suppose furthermore that for the admissible, complex algebraic polarizationn, we have that
mC := n + n
is a subalgebra of gC such that we have closed subgroups Q and M of G, with Liealgebras q and m, satisfying the relations
Gα ⊂ Q = GαQ ⊂M, (14)
n ∩ n = qC, (15)
n + n = mC. (16)
Step 4: From this point of view, the integrality condition comes out as the following.
Proposition 6.7. The coadjoint orbit Oα is quantisable if the one-dimensional rep-resentation ρα given by (12) integrates to a unitary character χQ of Q, i.e.
dχQ = ρα.
This gives us a unitary representation
π = IndGQχQ
of G on the completion of the space of ϕ ∈ C∞(G), such that
ϕ(hg) = ∆Q(h)1/2χQ(h)ϕ(g), for all g ∈ G, h ∈ Gα
andX(ϕ) = 0, for all X ∈ u,

46
where u is defined by the relation
n = gα + u
and ∆Q is the modular function as defined in definition 2.25.
6.3 Examples
6.3.1 The Heisenberg Group
It has been known since the 1960’s that the orbit method produces a perfect cor-respondence between the set of coadjoint orbits of a connected, simply connected,nilpotent Lie group G and its unitary dual G. Therefore, an appropriate first ex-ample of an application of the orbit method to find unitary representations of somegroup is the Heisenberg group, defined as
G := Heis(R) :=
(a, b, c) =
1 a c
0 1 b
0 0 1
: a, b, c ∈ R
,
with Lie algebra
g =
xE12 + zE13 + yE23 =
0 x z
0 0 y
0 0 0
: x, y, z ∈ R
.
Coadjoint orbits of G = Heis(R)
Using the trace form〈X, Y 〉 := trace(XY )
we can identify g∗ with the space of strictly lower triangular matrices. The linearfunctional α = (α1, α2, α3) given by
α(xE12 + zE13 + yE23) = xα1 + yα2 + zα3, with α1, α2, α3 ∈ R
is represented by
[α] =
0 0 0
α1 0 0
α3 α2 0
.
In this description of g∗ the coadjoint representation is given by
Ad∗(g)α = p(g−1 [α] g),

47
where p(X) denotes the strictly lower triangular part of X. Hence, we have
[Ad∗((a, b, c))α] =
0 0 0
α1 + bα3 0 0
α3 α2 − aα3 0
. (17)
From this we see that we have two families of coadjoint orbits. If α3 = 0, then thestabilizer Gα = G and the orbit Oα is the point (α1, α2, 0) in R3. If α3 6= 0, then
[Ad∗
((a,−α1
α3
,α2
α3
))α
]=
0 0 0
0 0 0
α3 0 0
and thus the orbit is a plane in R3, given by
Oα = (x, y, α3) : x, y ∈ R.
It is well-known that the unitary dual of the Heisenberg group can be thought of asthe disjoint union
G = R2 ∪ (R\0),
(see Berndt [1], section 7.4, example 7.11 ). Thus, we have a perfect correspondencebetween the set of coadjoint orbits of G and the unitary dual G.
On the coadjoint orbits Oα, with α3 6= 0 all multiples of
ω0 = dx ∧ dy
are symplectic forms, let us determine which one is the Kirillov-Kostant form. Let
X = x1E12 + x2E23 + x3E13, Y = y1E12 + y2E23 + y3E13 ∈ g.
Then we have[X, Y ] = (x1y2 − y1x2)E13
so by formula (10) we have
ωα(α)(ξX(α), ξY (α)) = α([X, Y ]) = (x1y2 − y1x2)α3. (18)
Recall that the vector fields ξ are given by
(ξXf)(α) =d
dt(f(Ad∗(exp(tX))α)).

48
It is easy to compute that
exp(tE12) = I3 + tE12,
exp(tE23) = I3 + tE23,
exp(tE13) = I3 + tE13
and by (17) we have
Ad∗(exp(tE12))α = (α1, α2 − tα3, α3),
Ad∗(exp(tE23))α = (α1 + tα3, α2, α3),
Ad∗(exp(tE13))α = (α1, α2, α3).
Hence, we find that
ξE12(α) = −α3∂
∂y,
ξE23(α) = α3∂
∂x,
ξE13(α) = 0
and thus
ξX(α) = x1ξE23(α) + x2ξE23(α) + x3ξE13(α) = x2α3∂
∂x− x1α3
∂
∂y.
Plugging these vector fields into the symplectic form ω0 yield
ω0(ξX(α), ξY (α)) = (x2α3(−y1α3)− y2α3(−x1α3)) = (x1y2 − y1x2)α23.
By comparing with (18), we see that the Kirillov-Kostant form on Oα ∼= R2 is
ωα =1
α3
dx ∧ dy.
An interesting feature of the coadjoint orbits is that none of the orbits containa closed 2-surface, so all of them are integral.
Constructing representations
First, for the zero-dimensional orbits corresponding to α3 = 0 there is not much todo. We have α = (α1, α2, 0) so the condition
α([X, Y ]) = 0

49
holds for all X, Y ∈ g and furthermore, the stabilizer Gα = G so the subgroup Q
containing Gα must also be all of G. Hence the one-dimensional representation
X 7→ 2πiα(X) = 2πi(α1x1 + α2x2)
integrates to a unitary representation π of G, given by
π(a, b, c) = e2πi(α1a+α2b).
Now, for each orbit Oα corresponding to α3 6= 0, we want to find an algebraicpolarization. One such polarization is obviously given by
n = spanE23, E13.
Indeed, since[E23, E23] = [E13, E23] = [E13, E13] = 0
we haveα([X, Y ]) = 0, for all X, Y ∈ n.
The stabilizer Gα is the group
Gα = (0, 0, c) : c ∈ R
and the one-dimensional representation
X 7→ 2πiα(X) = 2πiα3x3
integrates to a unitary character χQ of the subgroup Q with Lie algebra n. Since Gis nilpotent, it is unimodular (it is well known that nilpotent groups are unimodular,so we state this without proof). On the stabilizer, the unitary character χQ has theform
χQ((0, 0, c)) = e2πiα3c.
This leads us to consider functions satisfying
ϕ(hg) = χQ(h)ϕ(g), for all h ∈ Gα, g ∈ G,
which takes the formϕ((a, b, c)) = e2πiα3cF (a, b),
where F : R2 → C is a smooth function satisfying the polarization condition givenby n, realized as the condition
− ∂
∂bϕ = −e2πiα3c
∂
∂bF (a, b) = 0.

50
Hence, our representation space is functions on the form
ϕ((a, b, c)) = e2πiα3cf(a),
for some smooth function f . We recover the so called Schrödinger representation
f(t) 7→ πα3((a, b, c))f(t) := e2πiα3(c+bt)f(t+ a)
and from the Stone-von Neumann theorem, we know that any representation ob-tained via some other polarization is equivalent to this representation.
6.3.2 SU(2)
Here we will illustrate how the orbit method works in practice by using it to find theunitary representations of SU(2). This is by no means new, as the representationtheory of SU(2) is already well understood. However, this serves as a good illustra-tion of the power of the orbit method, since the group SU(2) is particularly nice towork with. Indeed this group is semisimple and compact but non-abelian, thereforeit has irreducible representations of dimension greater than one.
Coadjoint orbits of SU(2)
We begin by realising SU(2) as a matrix group in the usual way
SU(2) =
(a b
−b a
): a, b ∈ C, |a|2 + |b|2 = 1
.
We will take a few well-known facts about the relation between SU(2) and SO(3)
for granted. We collect them in the following lemma:
Lemma 6.8. The Lie group SU(2) is a double cover of the Lie group SO(3), i.e.there exists a 2-1 Lie group homomorphism
Ψ : SU(2)→ SO(3).
The kernel of Ψ is I,−I, so we have
SO(3) ∼= SU(2)/I,−I.
The Lie algebras su(2) and so(3) are isomorphic and furthermore, via the iso-morphism 0 −x2 x3
x2 0 −x1
−x3 x1 0
7→ (x1, x2, x3),

51
we have(so(3), [·, ·]) ∼= (R3,×),
where × denotes the usual vector product in R3.
Since SU(2) is semisimple, we may also identify
su(2)∗ ∼= so(3)
via the inner product
〈X, Y 〉 := −trace(XY )
2.
Using this, we see that the coadjoint orbits of SU(2) are
Oα = Ψ(g−1)xαΨ(g) : g ∈ SU(2),
where xα is the point in R3 corresponding to α. This correspondence is given asfollows. The form α is identified with Xα ∈ so(3) via
α(Y ) = −trace(XαY )
2, for all Y ∈ so(3)
and this Xα is identified with xα via the isomorphism so(3)→ R3.Since Ψ(g) ∈ SO(3) for all g ∈ SU(2), we see that the coadjoint orbits are the
2-spheres S2r ⊂ R3 with radii r > 0 and centres at the origin.
A symplectic structure on S2r is given by the Kirillov-Kostant form on S2
r, givenby
(ωr)x(u, v) :=〈x, u× v〉
r2, x ∈ S2
r, u, v ∈ TxS2r.
This is just a scaled version of the usual area form on S2r
dAx = xy(dx ∧ dy ∧ dz) = xdy ∧ dz + ydz ∧ dx+ zdx ∧ dy.
The orbit S2r is quantisable if ∫
S2rωr ∈ 2πZ.
Indeed, the only closed 2-surface in S2r is the whole of S2
r itself. Utilizing that
dωr =3
r2dx ∧ dy ∧ dz
we compute ∫S2rωr =
∫∂B3
r
ωr =
∫B3r
dωr =3
r2
∫B3r
dx ∧ dy ∧ dz = 4πr.

52
Hence, S2r is quantisable if r ∈ 1
2Z.
Kähler structure on S2
Our aim is to find a Kähler polarization of the coadjoint orbits, which we know arethe 2-spheres of half-integer radius. Let us start by finding a Kähler structure on ageneral 2-sphere S2 with radius r.
Let p ∈ S2 be the ”north pole” of the sphere and consider the stereographicprojection
U+ := S2\p → C, (x1, x2, x3) 7→ z :=x1 + ix2
1− x3
.
This and the corresponding map given by removing the antipodal point p
U− := S2\p → C
forms an atlas on S2. In these coordinates we may express ωr as
ωr =i
r(1 + |z|2)2dz ∧ dz.
Now consider the real function
K(|z|2) :=1
rlog(1 + |z|2
).
Note that∂K =
z
r(1 + |z|2)dz,
so that we havei∂∂K =
i
r(1 + |z|2)2dz ∧ dz = ωr.
This shows that S2 is a Kähler manifold and hence admits the holomorphic andanti-holomorphic polarizations spanned by ∂
∂zand ∂
∂z, respectively.
The Hilbert space
Equip the coadjoint orbit S2r, with r ∈ 1
2Z with the atlas
(U±, z±)
given by stereographic projection. On U+ ∩U− we have a homeomorphism given by
C ∼= U+\p → U−\p ∼= C, z 7→ 1
z.

53
As in theorem 4.2, we construct a line bundle over S2r with transition functions
c++(p) = 1
c−−(p) = 1
c+−(p) =1
z2r.
We get the space
B = [(U+ × C) ∪ (U− × C)] / ∼∼= (C2 ∪ C2)/ ∼,
where the equivalence relation ∼ is defined by
(p, z) ∼ (p′, z′)
iff p = p′, z = z′ for p, p′ ∈ U±, and p′ = 1p, z′ = 1
z2rfor p ∈ U+, p
′ ∈ U−. Let usconsider the sections of this bundle polarized by the anti-holomorphic polarization P .We can identify the space of polarized sections ΓP(B) with the space of holomorphiccomplex valued functions on S2
r. Indeed, the condition
∇Xs = ∇X(fσ) = 0
simply becomes∂
∂zf = 0
because the potential 1-form corresponding to ∇ vanishes along P . Furthermore,on the intersections U+ ∩ U− we have
(p, f(p)) 7→(
1
p, f
(1
p
))∼(p, p2rf
(1
p
))
and since p2rf(
1p
)is holomorphic, it must have the form
2r∑k=1
akpk.
Hence, the Hilbert space of square-integrable, polarized sections of the prequantumline bundle over S2
r is the space P (C) of complex polynomials of degree 6 2r, withr ∈ 1
2Z.

54
Unitary representations of SU(2)
The curvature of the prequantum line bundle B is ω. The potential 1-form θ for theconnection ∇ is
θ = −i∂K =iz
r(1 + |z|2)dz.
Given some real-valued f ∈ C∞(S2), the corresponding Hamiltonian vector field(in stereographic coordinates) is
Xf = ir(1 + |z|2
)2(∂f
∂z
∂
∂z− ∂f
∂z
∂
∂z
).
Plugging Xf into the potential 1-form θ yields
θ(Xf ) = −z(1 + |z|2)∂f
∂z.
Hence, for an arbitrary section s = gσ we have
∇Xf s =
(ir(1 + |z|2
)2(∂f
∂z
∂g
∂z− ∂f
∂z
∂g
∂z
)− z(1 + |z|2)
∂f
∂zg
)σ
Thus the Kostant-Souriau operator
f = i∇Xf + f
becomes in stereographic coordinates
f = −r(1 + |z|2
)2(∂f
∂z
∂
∂z− ∂f
∂z
∂
∂z
)− iz(1 + |z|2)
∂f
∂z+ f.
We now want to find functions f1, f2 and f3 such that[fi, fj
]= cijkfk, (19)
where cijk are the structure constants of su(2). Using that the structure constantsof su(2) are
c123 = 2, c231 = 2, c312 = 2,
and the relation [fi, fj
]= −ifi, fj,
we find that a condition equivalent to (19) is
fk =r(1 + |z|2)2
2
(∂fi∂z
∂fj∂z− ∂fi∂z
∂fj∂z
).

55
A triple of such functions is
f1 =i(z + z)
r(1 + |z|2), f2 =
z − zr(1 + |z|2)
, f3 =−i(|z|2 − 1)
r(1 + |z|2).
We know that the Hilbert space is the space P (C) of complex polynomials withdegree less than 2r. The homogeneous polynomials Pn(C) of degree n 6 2r form aninvariant subspace of P (C). Hence, f1, f2 and f3 form a representation of su(2) inPn(C). Lifting this to the group level gives us all irreducible, unitary representationsof SU(2).
References
[1] R. Berndt, Representations of Linear Groups, Vieweg, 2007.
[2] R. Berndt, An Introduction to Symplectic Geometry, American Mathematical Society,2001.
[3] N. M. J. Woodhouse, Geometric Quantization, Clarendon press, 1997.
[4] J. Jost, Riemannian Geometry and Geometric Analysis, Springer, 2005.
[5] A. A. Kirillov, Lectures on the Orbit Method, American mathematical society, 2004.
[6] A. A. Kirillov, Elements of the Theory of Representations, Springer, 1976.
[7] E. Lerman, Geometric quantization; a crash course, 2012. arXiv:1206.2334 [math.SG].
[8] B. C. Hall, Quantum Theory for Mathematicians, Springer, 2013.
[9] B. C. Hall, Lie Groups, Lie Algebras and Representations, Springer, 2015.
[10] D. A. Vogan, Review of ”Lectures on the Orbit Method” by A. A. Kirillov, 2005. Bull.Amer. Math. Soc. 42 (2005).