Embed Size (px)
Citation preview

doi: 10.1098/rstb.2005.1733, 5-22361 2006 Phil. Trans. R. Soc. B
D.J.T Sumpter The principles of collective animal behaviour
References
http://rstb.royalsocietypublishing.org/content/361/1465/5.full.html#related-urls Article cited in:
http://rstb.royalsocietypublishing.org/content/361/1465/5.full.html#ref-list-1
This article cites 95 articles, 14 of which can be accessed free
Rapid responsehttp://rstb.royalsocietypublishing.org/letters/submit/royptb;361/1465/5
Respond to this article
Email alerting service hereright-hand corner of the article or click Receive free email alerts when new articles cite this article - sign up in the box at the top
http://rstb.royalsocietypublishing.org/subscriptions go to: Phil. Trans. R. Soc. BTo subscribe to
This journal is © 2006 The Royal Society
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from

Phil. Trans. R. Soc. B (2006) 361, 5–22
doi:10.1098/rstb.2005.1733
Published online 28 November 2005
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
Review
The principles of collective animal behaviour
D. J. T. Sumpter**david.s
ReceivedAccepted
Department of zoology, South Parks Road, Oxford, OX1 3PS, UK
In recent years, the concept of self-organization has been used to understand collective behaviour ofanimals. The central tenet of self-organization is that simple repeated interactions betweenindividuals can produce complex adaptive patterns at the level of the group. Inspiration comes frompatterns seen in physical systems, such as spiralling chemical waves, which arise without complexityat the level of the individual units of which the system is composed. The suggestion is that biologicalstructures such as termite mounds, ant trail networks and even human crowds can be explained interms of repeated interactions between the animals and their environment, without invokingindividual complexity. Here, I review cases in which the self-organization approach has beensuccessful in explaining collective behaviour of animal groups and societies. Ant pheromone trailnetworks, aggregation of cockroaches, the applause of opera audiences and the migration of fishschools have all been accurately described in terms of individuals following simple sets of rules.Unlike the simple units composing physical systems, however, animals are themselves complexentities, and other examples of collective behaviour, such as honey bee foraging with its myriad ofdance signals and behavioural cues, cannot be fully understood in terms of simple individuals alone.I argue that the key to understanding collective behaviour lies in identifying the principles of thebehavioural algorithms followed by individual animals and of how information flows between theanimals. These principles, such as positive feedback, response thresholds and individual integrity, arerepeatedly observed in very different animal societies. The future of collective behaviour research liesin classifying these principles, establishing the properties they produce at a group level and askingwhy they have evolved in so many different and distinct natural systems. Ultimately, this researchcould inform not only our understanding of animal societies, but also the principles by which weorganize our own society.
Keywords: self-organization; animal groups; societies; collective behaviour
1. INTRODUCTIONI am sitting at my office window watching the students
come out of the lecture theatre. They queue to buy
coffee. When served, they leave in groups of three or
four and edge towards the cafe’s tables, looking
nervously at each others faces to ascertain some weak
preference for a seat in the sun or shade. Once the
unspoken decision is made they sit down quickly, sip
their coffee and begin to relax, the morning’s lectures
behind them. Faces light up and their conversation
turns in directions I cannot possibly imagine.
For those five or so minutes after the lecture the
students’ behaviour is almost entirely predictable. The
picture I have painted is not simply something I see
every morning, but is familiar to university campuses
all over the world. Different personal histories and
drink preference aside, the pattern of waiting our turn,
making joint, unspoken decisions about where to sit
and relaxing together after a period of concentration is
familiar to us all. Every day we see examples of groups
of autonomous individuals behaving collectively in a
manner that can be described in a few simple words.
11 March 200511 August 2005
5
Although familiar to us all, a few students standingin a queue probably qualifies as one of the least
spectacular examples of collective behaviour of human
or animal groups. It is difficult to know where to start
when choosing the most spectacular. A flock of birds
twisting in the evening light; a fish school wincing at the
thought of a predator; the cram to leave an under-ground station; ants marching in an endless line; the
stop and start traffic jams; the quiet hum of a honey bee
hive; the pulsating roar of a football crowd; a swarm of
locusts flying across the desert; or even the bureaucracy
of the European Union (figure 1). In all these
examples, the individual is submerged as the grouptakes on a life of its own. The individual units do not
have a complete picture of their position in the overall
structure and the structure they create has a form that
extends well beyond that of the individual units.
There is a sense in which all these collective patterns
are regular and even predictable. In the hustle andbustle of a busy street we can forget the complex
reasons each of us had for shopping on this particular
Saturday morning. Brought together to search for a
roost, the migrating birds do not reflect on the long
day’s flight behind them. The submergence of the
individual brings a new order to the group. Never-theless, understanding how coordinated patterns
q 2005 The Royal Society

Figure 1. Examples of collective animal behaviour. (a) Fish milling (reproduced with permission from Philip Colla,oceanlight.com). (b) The entrance crater to a nest of the ant Messor barbarus (from Theraulaz et al. 2003). (c) Traffic flow in Paris(reproduced with permission from Anthony Atkielski). (d ) A bifurcation in a Pharaoh’s ant trail (reproduced with permissionfrom Duncan Jackson). (e) A Mexican wave at an American football game (taken from Farkas 2002). ( f ) A band of marchinglocusts (reproduced with permission from Iain Couzin).
6 D. J. T. Sumpter Principles of collective animal behaviour
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
emerge from a mass of interactions between individualsposes a difficult problem. The regularity of collectiveanimal behaviour leaves us feeling that there must besome unifying laws which govern these differentphenomena. But, while the line of commuting carsmight remind us of a trail of ants, are there deepsimilarities which connect them? If so, can wedetermine a set of principles that allow us to classifyand understand collective animal behaviour?
It was on the basis that ‘experimental evidence, aswell as daily observation, show that systems involving alarge number of interacting subunits can present, undercertain conditions, a marked coherent behaviourextending well beyond the scale of the individualsubunit’ that Nicolis & Prigogine (1977) wrote ‘Self-organization in Nonequilibrium Systems’. Their desirewas to go beyond simple analogies and pin down arigorous theory of these ‘self-organized’ systems. Sucha theory should explain how complex structures arisefrom repeated interactions between the individualunits. It should show why certain structures are createdand persist and explain the similarities between systemsat very different scales and levels of biologicalorganization. For example, could the flow of traffic be
Phil. Trans. R. Soc. B (2006)
described by the mathematics of fluid flow? And if thiswas the case could we make general statements aboutthe flow of any type of matter, be it swarms of locusts,crowds leaving football grounds or water running downthe drain.
Nicolis and Prigogine were partially successful intheir enterprise. They showed that many of themathematical equations used for describing chemicalreactions could equally well be considered as modelsof, for example, predator–prey interactions or thebuilding behaviour of termites. By applying the samemathematical models to very different systems theyargued for a formal correspondence, above that of mereanalogy, between the modelled systems.
Nicolis and Prigogine were not alone in their beliefthat many aspects of collective behaviour could bemodelled mathematically, and thus direct and usefulcomparisons drawn between diverse systems. Thepreceding decades had seen books by Ashby (1947),Wiener (1948) and von Bertalanffy (1968) all of whichaimed at providing a framework for the study ofcollective behaviour. Von Bertalanffy argued for theexistence of general growth laws of social entities asdiverse as manufacturing companies, urbanization and

Principles of collective animal behaviour D. J. T. Sumpter 7
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
Napoleon’s empire. His approach was ‘empirico-intuitive’, in that he used observations on the growthof organisms and applied the principles to othersystems. However, neither von Bertalanffy, Nicolisand Prigogine nor any of the other early pioneers ofself-organization experimentally validated the modelsthey proposed for collective phenomena in humans oranimals.
There was good reason for the lack of exper-imental testing of the theories of self-organization.For most collective phenomena involving humans itis simply impossible to perform experiments. Howdo you do an experiment to test a hypothesizedmodel for the growth of Napoleonic empires? Evenfor the collective behaviour of animals, such asflocking birds, the collection of field data requires alarge number of cameras and sophisticated computertracking software. However, around the time ofNicolis & Prigogines’ book another member oftheir Brussels group, Jean–Louis Deneubourg,began to develop and test a theory of self-organization in social insect societies. Based on theassumption that insect societies follow simplebehavioural rules, Deneubourg’s approach was towrite down mathematical models of how colonies ofants forage and termites build mounds (Deneubourg1977; Deneubourg & Goss 1989). By conductinglaboratory experiments where the insects wereconstrained to relatively simple environments,Deneubourg and his colleagues were able to testand, in some cases, validate these models (Camazineet al. 2001).
Similar approaches, in many cases developedindependently of the Brussels’s school, have beenapplied to understanding the collective behaviour offish, cockroaches, humans and other animals. Nicolisand Prigogine’s basic observation, that individualsfollowing simple behavioural rules can producecomplex behavioural patterns, has not only proved auseful idiom for describing a whole range of collectivephenomena; even more importantly, the fact that thesesimple rules can be encapsulated in mathematicalmodels has meant that clear, testable predictionsabout the collective behaviour of animal groups andsocieties can be made. Making and testing thesepredictions has become the field of ‘self-organization’.
2. EXAMPLES OF SELF-ORGANIZATION(a) Ant trailsThe canonical example of a self-organized animalbehaviour is ant pheromone trails. Many species ofants deposit chemicals, known as pheromones, to markthe route from food to nest (Wilson 1971). Afterfinding a food source and feeding, an ant returns to thenest, pausing at regular intervals on its way to leavesmall amounts of pheromone. The ant then makesrepeated trips from nest to food source, often leavingmore pheromone to reinforce its trail. Other ants,which were previously unaware of the food source andencounter the trail, will follow the trail and find thefood source. Once they have collected food, thesefollower ants also leave pheromone on their returnjourney. Through this positive reinforcement, the
Phil. Trans. R. Soc. B (2006)
pheromone trail builds up and after a short time wesee a steady trail of ants walking between food and nest.Pheromone trails are formed purely on the basis of localinformation. They are started by a single individual or asmall group of ants responding to the presence of foodand they are reinforced by ants that encounter andfollow the trail.
Despite their simplicity, pheromone trails can beused to solve the problem of directing the majority ofants on the shortest route from food to nest. Forexample, Beckers et al. (1992) presented starvedcolonies of the ant Lasius niger with two alternativebridges between food and nest, then measured thenumber of ants using the two bridges 30 min after thefirst ant had found food. When one of the bridges wasonly 40% longer than the other, over 80% of the antstook the shorter bridge in 16 out of the 20 experimentaltrials. Individual ants make little or no comparison ofthe two bridges, instead the slightly longer trip timemeans that pheromone is laid less rapidly on the longerbridge. Thus, when trail following ants make the choicebetween two bridges they detect a higher concentrationof pheromone on one of the bridges, the shorter one(Beckers et al. 1993). The shorter bridge is thus chosenwith a higher probability by the follower ants and whenthese ants return home they further reinforce theshortest path. Since pheromone continually evaporateson both paths but is more strongly reinforced only onthe shortest path, the ants rapidly concentrate their trailon the shorter path.
While lab experiments are usually on the scale oftens of centimetres, in nature some species of ants buildtrail networks on the scale of kilometres or evenhundreds of kilometres (Holldobler & Wilson 1990).Using computer simulations, Deneubourg et al. (1989)showed that the complex trail networks created byarmy ants during a raid could be reproduced by thesimple rules for pheromone laying and following foundin the double bridge experiments. By manipulating thefood distribution, Franks et al. (1991) showed that themodel accurately predicted network structure. It is inthis sense we call ant foraging self-organized: antsfollow only local rules regarding the laying andfollowing of pheromone, but the resulting trailstructure is built on a scale well beyond that of a singleant.
To be more specific, we can say that ant trails resultfrom positive feedback. The one ant which first findsthe food starts a feedback loop as more and more antsare recruited to the food, and as more ants arerecruited the rate of recruitment increases further.Similar positive feedback loops are also seen in therecruitment dance of the honey bee (Seeley et al. 1991;Seeley 1995), the construction of termite mounds(Bonabeau et al. 1998) and cemetery building byMessor sancta ants (Theraulaz et al. 2002). In each ofthese cases, the mechanism for recruitment is differentbut the same pattern of rapid amplification of someinitial event is seen. Positive feedback is not limited tosocial insects, where there are high levels of geneticrelatedness and thus co-operation between the colonymembers, but is also observed within groups ofunrelated animals. For example, cockroaches rest forlonger periods under shelters with more cockroaches

zoa
y
xz
a˚
(360-a)˚
zoo
zor
(a) (b)
(c) (d )
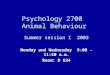
Figure 2. Couzin et al. (2002) model of fish dynamics. (a) Illustration of the rules governing an individual in the fish model. Theindividual is centred at the origin: zor, zone of repulsion; zoo, zone of orientation; zoa, zone of attraction. The possible ‘blindvolume’ behind an individual is also shown, a, field of perception. Collective behaviours exhibited by the model: (b) swarm, (c)torus and (d ) dynamic parallel group.
8 D. J. T. Sumpter Principles of collective animal behaviour
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
leading to aggregation (Ame et al. 2004) andsolitarious locusts are excited through multiple con-tacts with other solitarious locusts leading to gregar-ization and collective migration (see figure 1e; Collettet al. 1998; Simpson et al. 2001).
(b) Flocks, schools and crowds
Some of the most mesmerizing examples of collectivebehaviour of animal groups can be seen overhead everyday. V-shaped formations of migrating geese, starlingsdancing in the evening sky and hungry seagullsswarming over a fish market, are just some of thewide variety of shapes formed by bird flocks. Fishschools also come in many different shapes and sizes:stationary swarms; predator avoiding vacuoles andflash expansions; hourglasses and vortices; highlyaligned cruising parabolas, herds and balls (Partridge1982; Partridge et al. 1983; Parrish et al. 2002). Theseshapes are often seen on a scale that far exceeds the sizeor even the range of interaction of individual fish.Herring schools can consist of more than 5000individuals spread over 700 m2 (Mackinson 1999).
Despite the variety of shapes and motions of animalgroups it is possible that many of the different collectivepatterns are generated by small variations in the rulesfollowed by individual group members. Several authorshave developed computer simulation models, known asself-propelled particle (SPP) models, that attempt to
Phil. Trans. R. Soc. B (2006)
capture the collective behaviour of animal groups in
terms of the interactions between group members(Okubo 1986; Reynolds 1987; Gueron et al. 1996;
Czirok & Vicsek 2000). For example, Couzin et al.(2002) proposed a model in which individual animals
follow three simple rules of thumb: (i) move away fromvery nearby neighbours; (ii) adopt the same direction as
those that are close by and (iii) avoid becomingisolated. Each individual thus has three zones—
repulsion, alignment and attraction—which increase
in size, so that individuals are attracted to neighboursover a larger range than they align, but decrease in
priority, so that an individual would always move awayfrom neighbours in the repulsion zone (figure 2a).
Keeping the repulsion and attraction radii constant,Couzin et al. (2002) found that as the alignment radius
increased, individuals would go from a loosely packedstationary swarm (figure 2b), to a torus where
individuals circle round their centre of mass(figures 1a and 2c) and, finally, to a parallel group
moving in a common direction (figure 2d ). Far from
requiring a distinct set of behaviours, these three verydifferent collective patterns self-organize in response to
a small adjustments to one factor: the radius over whichindividuals align with each other (Couzin & Krause
2003). Hoare et al. (2004) later used a similar model toexplain the group size distribution they observed in
laboratory experiments.

0.03
0.4
0.3
0.2
0.1
01 2 3 4 5 6 7
0.02|g
dN/d
r 1/
Nt
0.01
0 10 20 30t (s)
f (1/s)
(a)
(b)
Figure 3. The emergence of synchronized clapping (from Neda et al. 2000a,b). (a) The average noise intensity of a crowdthrough time. The first 10 s shows unsynchronized fast clapping, followed by a change to regular slower clapping until around27 s, followed by synchronized clapping again. (b) A normalized histogram of clapping frequencies for 73 high school students(isolated from each other) for Mode I (solid) and Mode II (dashed) clapping.
Principles of collective animal behaviour D. J. T. Sumpter 9
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
If the complex patterns produced by animal groupscan be explained in terms of a few simple rules, is itpossible to use simulation models to predict and evencontrol the behaviour of human crowds? Helbing et al.(2000) proposed a simulation model for pedestriansattempting to escape life-threatening situationsthrough a limited number of exits. They assumedthat, in such a situation pedestrians’ behaviour islimited to following a few simple rules: try to minimizetravel time, avoid collisions with walls and move in thedirection of other people. Tragically, these naturalbehaviours are also those which lead to increasedblockages and decreased probability of escape. Helbinget al. (2000) were also able to show that wideningcorridors could actually lead to slower collectivemotion, because pedestrians at the end of the wideningslow down traffic by trying to squeeze back in to themain flow. Helbing’s modelling approach has beenusefully applied in understanding: why pedestrianswalking on a busy street form bands moving inalternative directions (Milgram & Toch 1969; Helbing& Molnar 1995), the speed of Mexican waves infootball stadiums (see figure 1e; Farkas et al. 2002,2003); as well as the formation of traffic jams (Helbing& Huberman 1998; Helbing & Treiber 1998). Thesemodels, which treat humans as particles that interactaccording to a set of ‘social forces’, have beenremarkably successful in predicting the shape anddynamics of crowds.
(c) Audience applause
After any good concert performance, audiences expresstheir appreciation by a loud round of applause. InEastern Europe and Scandinavia this applause is oftenrhythmical, with the entire audience clapping simul-taneously and periodically. Neda et al. (2000a,b)recorded and analysed the clapping of theatre andopera audiences in Romania and Hungary and found a
Phil. Trans. R. Soc. B (2006)
common pattern: first an initial phase of incoherent butloud clapping, followed by a relatively sudden jumpinto synchronized clapping that, after about half aminute, was again rapidly replaced by unsynchronizedapplause (figure 3a). A surprising observation was thatthe average volume of the synchronized clapping islower than that of unsynchronized applause, bothbefore and after the synchronized bouts. While anaudience presumably wants to maximize their volumeand thus their appreciation of the performance, theyare unable to combine louder volumes with synchro-nized clapping.
Neda et al. (2000a,b) went on to record small localgroups in the audience and asked individuals, isolatedin a room, to clap as if (I) ‘at the end of a goodperformance’ or (II) ‘during rhythmic applause’. Bothmodes of clapping were rhythmical at the individuallevel, with individuals clapping in mode I twice as fastas those clapping in mode II (figure 3b). The importantdifference was in the between individual variation forthe two modes. When asked to clap rhythmically,isolated individuals chose similar, though not preciselyidentical, clapping frequencies, while when given thefreedom to applaud spontaneously the chosen frequen-cies spread over a much wider range.
To interpret this observation, Neda et al. (2000a,b)used a classical mathematical result about coupledoscillators. Kuramoto (1975) showed that if a largenumber of oscillators, for example pendulums hangingon a wall, each with its own frequency, are coupledtogether so that they continually adjust their frequencyto be nearer that of the average frequency, thenprovided the oscillators’ initial frequencies are not toodifferent they will eventually adopt the same frequencyand oscillate synchronously (Kuramoto 1984). This iswhat happens to audiences clapping according to modeII. Their initial independent clapping frequencies areclose together, and by listening to the clapping of

1000
800
600
400
200
0 200 400 600 800 1000number of components
num
ber
of a
nts
at f
eede
r
syst
em o
utpu
t
colony size (n)1200
(a)
200 400 600 800 1000
1000
800
600
400
200
0
(b)
colony size (n)
400 800 1200 1600 2000
40
30
20
10
incr
ease
in n
umbe
r of
ant
s w
alki
ngto
fee
der
alon
g th
e tr
ail (
x)
0
–5
35
25
15
5
(c)
Figure 4. How different systems increase output as a function of number of system components. (a) A linear increase in systemoutput with number of components. (b) Model prediction of how the number of foragers visiting a feeder changes with numberof ants in the colony. The black line is the predicted stable equilibrium for number of foragers visiting the feeder. The grey line isthe unstable equilibrium. If fewer ants than the unstable equilibrium initially discover the source, then the total increase inforagers will be determined by the lower stable equilibrium. However, if the initial discovery is by a larger group than theunstable equilibrium, then the increase will be to the upper equilibrium. The model for the rate of change of ants going to thefeeder, x, is dx=dtZaxCbxðnKxÞKsx=ðsCxÞ: The figure shows the equilibrium solutions for parameter values: aZ0.004 5,bZ0.000 15, sZ10 and n, the total number of ants, varied between 0 and 65 (see Beekman et al. 2001 for details). (c) Colonysize versus the maximum increase in the number of ants walking to a feeder within 40 min of its introduction to an arenacontaining a starved ant colony (see Beekman et al. 2001 for details). The solid line connects the means of all trials at a givencolony size, while crosses represent single trials.
10 D. J. T. Sumpter Principles of collective animal behaviour
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
others, they synchronize their clapping. Audiencesclapping in mode I, however, have initial clappingfrequencies which are less similar to each other. Thus,even if they try to adjust their clapping in reaction to thesound around them, the Kuramoto model predicts thatthey will never arrive at a state of synchronizedclapping. This is exactly what happened in theaudiences that were recorded: faster clapping, withgreater inter-individual variation never synchronized.Theatre audiences are thus forced to choose betweentwo different manners of showing their appreciation:loud, frequent, unsynchronized or quieter, less fre-quent, synchronized clapping.
Synchronized rhythmic activity is seen in manydifferent animal groups and across all of biology(Strogatz 2003). For example, Leptothorax ants syn-chronize their bouts of activity (Franks et al. 1990; Cole1991; Boi et al. 1999), human females’ menstrualcycles become synchronized when living or workingclosely together (Stern & McClintock 1998) and,probably the best studied example, fireflies synchronizetheir flashing (Buck & Buck 1976). The importance ofKuramoto’s model is that it shows that individuals withslightly different frequencies can synchronize, each bymoving their frequency slightly towards the average.
Phil. Trans. R. Soc. B (2006)
This observation is by no means obvious, and the
prediction that above some critical amount of between-
individual variation synchronization cannot occur has
wide ranging implications. For fireflies, the prediction
is that species that do not synchronize their flashing will
have higher between-individual variation, and possibly
more rapid flashing.
3. PROPERTIES OF SELF-ORGANIZATIONBeyond the fact that individuals produce collective
patterns, is there anything more specific we can say
about these phenomena we have labelled self-orga-
nized? The answer to this question lies in the
relationship between similarities in the rules governing
and the patterns generated by very different systems.
Opera audiences and groups of fireflies are different in
shape and size, method of communication and their
objectives, but both are restricted by inter-individual
differences when trying to synchronize their actions.
Birds fly, fish swim and pedestrians walk, but they all
exhibit the tendency to move away from those that are
too close while avoiding being left completely out on
their own. These simple rules result in similar patterns

Principles of collective animal behaviour D. J. T. Sumpter 11
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
of aggregation and directed movement, independent ofthe details of the animals involved.
If we are to build a useful theory of self-organizationof animal groups it is not enough to say that certainthings ‘look’ similar. In the above examples, the aspectthat links different systems together is similarity in themathematical models we used to describe theirbehaviour. For pheromone trails, cockroach shelterchoice and ant cemeteries, mechanisms of positive andnegative feedback produced aggregations and collectivedecisions; for oscillating fireflies and hand clapping, theKuramoto model of coupled oscillators providedunderstanding of the role of variation in synchroniza-tion; and the dynamics of fish schools and humancrowds were all captured by SPP models. If the samemathematical model captures the behaviour of differentsystems then we can talk about similarities betweensystems that go further than simple analogy. We can useour mathematical models to make predictions thatapply to many different systems. Furthermore, if twosystems obey the same mathematical laws, we canperform experiments on one system and infer howanother system might behave under similar conditions.
(a) More than the sum of its parts
A concrete example of a mathematical prediction thatspans all systems subject to positive feedback is thatthese systems are ‘more than the sum of their parts’(Aristotle, Metaphysica, 10f–1045a). That is to say thatwhen we plot system ‘output’ against number of systemcomponents we do not get a straight line (figure 4). Forexample, if an ant in a small colony finds a food sourcea long way from the nest, then by the time another antpasses over the place she left a pheromone trail, thepheromone will probably have evaporated. In this case,the trail does not help other ants find the food. For largecolonies of ants, however, it is more likely that an antwill cross the pheromone trail before it evaporates andreinforce it. The reinforcement leads to the familiarpositive feedback loop and a well-established trailbetween nest and food. Thus, the output of the system,i.e. number of ants visiting the feeder and hence foodcollected, is low for small ant colonies but rapidlyincreases as the colony becomes larger.
Beekman et al. (2001) formalized this verbalargument in a mathematical model of trail laying. Themodel predicted that (a) as the number of ants in thecolony increased the number of ants visiting the feederwould increase nonlinearly and (b) provided the rate atwhich ants found the food without following a trail wassmall, then at a critical colony size there would be asudden switch from few ants visiting the feeder to a largeproportion of the ants visiting the feeder (figure 4b).Both these predictions were confirmed experimentally(figure 4c). Small colonies were unable to establish aneffective pheromone trail, while above a critical size, inthis case 700 ants, trails were formed between nest andfood. In small groups the ant colony was merely a sum ofits parts, the amount of food collected being a total ofthat collected by ants that discovered food indepen-dently. But together, in large numbers, the positivefeedback of pheromone communication meant a jumpin efficiency that made the colony more than the sum ofindependently working ants.
Phil. Trans. R. Soc. B (2006)
We can also think of bird flocks and other animalherds as being more than the sum of their parts. Using asimple SPP model, Czirok et al. (1999) showed that agroup of individuals that align their direction with thatof their neighbours undergo a rapid transition fromrandom motion at low densities, where each individualmoves largely independently of the others, to directedmotion at high densities where all individuals move in acommon direction. We can think of the output of theflock to be a common direction, e.g. a shared migrationroute, and as the flock’s density increases there is acontinuous, but rapid nonlinear change to having ashared direction. More recently, it has been shown thatunder some conditions the transition from random to acommon direction can be discontinuous, as it was forant foraging (Gregoire et al. 2003; Gregoire & Chate2004).
(b) The central limit theorem
Not all of the collective patterns produced by animalgroups are more than the sum of their parts. Symmetri-cal structures, such as the domes built by wood ants orthe craters built by M. barbarus ants (Chretien 1996;Theraulaz et al. 2003), can result from the independentactions of the colony’s ants (figure 1b). For example,Chretien (1996) showed that when an individualM. barbarus ant leaves the nest hole with a sand pellet,she moves in a straight line away from the hole in arandom direction. Once the ant is, on average, 4.8 cmfrom the hole she drops the pellet. The fact that thedirection chosen by the ant is independent of thedirection taken by the other ants in the colony producesa symmetrical crater. The height of this crater, whichhere can be considered the output of the colony, isproportional to the number of building ants (as infigure 4a). It is purely the sum of the parts that created it.
The fact that the crater wall is equally high on allsides of the ants’ nest entrance is a consequence of aremarkable mathematical theorem that applies to allsystems consisting of large numbers of independentindividuals: the central limit theorem. The theoremstates that if each of a large number of independentindividuals contributes a small randomly distributedquantity to some total output, then that total output isdistributed according to a Normal distribution. More-over, the standard deviation of total output increases inproportion to the square root of the number ofindividuals. Since the height of the ants’ wall increasesin proportion to the number of individuals and, by thecentral limit theorem the standard deviation around thewall increases as its square root, once the wall isreasonably high the variation in its height will be smallrelative to its average height. Thus, despite, and indeedbecause of, the ants working independently an evenouter wall is constructed.
The central limit theorem is the most basicstatement about and the cornerstone for understandingall collective phenomena. It proves that systemsconsisting of independent parts are ‘usually’ no morethan a square root of the number of parts more or lessthan the sum of their parts. The Normal distribution isuniversal, in the sense that all systems consisting ofindependent parts are subject to it. It thus provides anull hypothesis against which all data taken from

7
6
5
4
3
2
1.00
0.75
0.50
0.25
0
1
00–20
0.0–0.2 0.2–0.4 0.4–0.6 0.6–0.8 0.8–1.0
20–40 40–60percentage foraging at feeder A
proportion of larvae on one site
prop
ortio
n of
exp
erim
ents
num
ber
of tr
ials
60–80 80–100
(a)
(b)
Figure 5. Distribution of the proportion of individualschoosing one of two identical options in binary choiceexperiments where (a) Pharoah’s ant are offered two identical(1.0 M sugar solution) food sources (reproduced fromSumpter & Beekman 2003) and (b) cockroaches are offeredtwo identical shelters (reproduced from Ame et al. 2004).
12 D. J. T. Sumpter Principles of collective animal behaviour
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
systems purporting to exhibit some kind of feedback orself-organization can be compared. Indeed, in thissense all self-organized systems can be explained interms of the manner in which their output deviate froma Normal distribution (Sornette 2004).
(c) Sensitivity to initial conditions
M. barbarus’ crater is not particularly sensitive to thedistribution of sand before building begins. If a smallpile of sand was put on one side of the nest hole, thispile would grow at the same rate as all other sides of thecrater. Once the walls of the crater had grown, theinitial difference may remain but look small relative tothe total height of the surrounding walls. Suchinsensitivity to initial distribution is not the case forant trails. For example, Beckers et al. (1992) repeatedtheir bridge experiments described earlier, this timestarting with only the longer bridge (28 cm betweennest and food) available. Once the ants established atrail on this bridge a shorter bridge (14 cm) wasintroduced. However, the established feedback on thelonger bridge was so strong, that in 16 out of 20 trialsthe ants did not switch to the shorter bridge. Strongpositive feedback had locked the ant in a suboptimalpath choice.
A standard test for whether a particular collectiveanimal behaviour is sensitive to initial conditions is theidentical binary choice experiment. In the absence ofpositive feedback we would expect a 50 : 50 splitbetween two equal alternatives. This does not occurfor systems subject to positive feedback. When Beckers
Phil. Trans. R. Soc. B (2006)
et al. (1992) offered Lasius niger ants two identicalbridges between food and nest, after 30 min themajority of the ants took only one of the two bridges.Sumpter & Beekman (2003) reported similar resultsfor Pharaoh’s ants when they offered the ants twoidentical feeders in opposite directions from the nest.Instead of a 50 : 50 split between feeders, the split wascloser to 70 : 30 or 30 : 70, giving a u-shapeddistribution of number of ants at one of the feedersover all the trials (figure 5a). The ‘winning’ feeder wasthe one that had the most ants nearby when it wasinitially placed in the foraging arena.
Similar results have been observed from cockroachesto consumers. For the cockroach, Blattella germanica,the positive feedback mechanism for aggregation isresting time: cockroaches rest for longer at sitescontaining more cockroaches (Ame et al. 2004; Jeansonet al. 2005). The result is the same as for the ants, au-shaped distribution of shelter choice (figure 5b). Thissame resting time feedback operates in spiders( Jeanson et al. 2004) as well as chain formation byweaver ants (Deneubourg et al. 2002). It has beenargued that similar patterns are seen in consumerchoice (Ormerod 1998). When two similar productsare released on the market, such as Betamax and VHSvideo recorders in the 1980s, after a short period ofboth products being used, one of them often out-competes the other. Fashion and group pressure couldprovide a powerful positive feedback mechanismwhereby small differences in products are amplified asthe herd of consumers follow the initial choices of a fewindividuals.
4. INDIVIDUAL VERSUS GROUP COMPLEXITYThe examples of self-organization I have discussed sofar illustrate how, for various types of interactionbetween individuals, we can use mathematical modelsto predict complex group level patterns of behaviour.Similarities and differences in the mathematical modelsapplied to these systems were helpful in drawing usefulcomparisons between the systems themselves. I haveeven outlined some useful and general predictionsabout these systems: that if the system consists ofindependent units its output will be normally dis-tributed, that if the units are subject to positivefeedback the systems output will be ‘more than thesum of its parts’ and strongly subject to its initialconfiguration. It may appear now that, through thiswonderful theory of self-organization and mathemat-ical modelling, we are well on our way to fullyunderstanding and determining relationships betweeneverything from the foraging of ant colonies toconsumer behaviour in our own society.
Unfortunately, such understanding is all too faraway. Unlike the simple units composing physicalsystems, animals are complex entities. While theassumption that humans follow a simple set of rulesmay hold in certain limited social situations—such asafter a concert, in a panic or when queuing for coffee—in a wider social context, each individual’s behaviour isa combination of countless genetic and environmentalfactors. The same is true for other mammals, birds, fishand even insects. For example, individual honey bees

Principles of collective animal behaviour D. J. T. Sumpter 13
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
are known to use at least 17 different communicationsignals, the most famous of which is the waggle dance,and adjust their behaviour in response to at least 34different cues (reviewed in Seeley 1998). Whileforaging for food, honey bees exhibit at least sevendifferent behavioural states, e.g. scout, recruit, inspec-tor etc. (see figure 6b; reviewed in Biesmeijer & de Vries2001), and exhibit a range of signals about the locationand availability of food (Seeley 1995).
While studies of self-organization have shown thatsimple interacting units can become more than the sumof their parts and self-organize (Bonabeau et al. 1997;Camazine et al. 2001) and that they sometimes follow‘simple rules of thumb’ (figure 6a; see also Detrain &Deneubourg 1997; Detrain et al. 1999; Detrain &Deneubourg 2002), this does not necessarily imply thatindividual social insects are simple units (Seeley 2002).There is evidence that only ant species with largecolonies use pheromone trails for communicating thepresence of food (Beckers et al. 1989), but there is littleevidence from between species comparison thatindividual complexity decreases with increased colonysize (Anderson & McShea 2001). Honey bees are justone example of species with both large colony sizes andindividuals that exhibit a complicated array of com-munication signals and behavioural states (figure 6b).Even the humble Pharoah’s ant, with its exclusivereliance on pheromones for recruiting to food, and thesubject of Beekman et al. (2001) colony size study, hasbeen shown to use at least three different pheromonesignals to organize traffic on its trails ( Jackson et al.2004; Jackson et al. in press; Duncan Jackson & ElvaRobinson personal communication). Thus, self-organ-ization gives us, through mathematical models, ameans of predicting the consequences of certaininteractions between individuals, but it is by nomeans an exclusive principle by which insect societiesare organized.
One example of a collective behaviour that has beenextensively studied from the viewpoint of bothindividual and group level complexity is the emigrationof ants of the genus Temnothorax (Moglich 1978;Mallon et al. 2001; Pratt 2005, in press; Pratt et al.2002, 2005). These ants, whose colonies consist ofbetween 50 and 500 individuals, live in smallpreformed cavities. In the laboratory, a colony whosenest has been damaged moves to a new site within a fewhours, reliably choosing the best site from as many asfive alternatives, discriminating among sites accordingto cavity area and height, entrance size, and light level(Pratt & Pierce 2001; Franks et al. 2003a,b). Around30% of the ants actively partake in the process ofchoosing a new nest site. These active ants undergofour phases of graded commitment to a particular nestsite (figure 6c). Each ant begins in an exploration phaseduring which she searches for nest sites. Once she findsa site she enters an assessment phase, carrying out anindependent evaluation of the site, the length of theevaluation being inversely proportional to the quality ofthe site (Mallon et al. 2001). Once she has accepted thesite she enters a canvassing phase, whereby she leadstandem runs, in which a single follower is slowly ledfrom the old nest to the new site. These recruited antsthen in turn make their own independent assessments
Phil. Trans. R. Soc. B (2006)
of the nest. Once the nest population has reached aquorum (a threshold population), the ant enters acommitted phase, rapidly transporting passive adultsand brood items.
Like the self-organized systems discussed earlier, thecollective ability to choose the best of several new nestsites does not rely on one ant possessing information onmore than a small part of the colony’s task. Tandem runrecruitment also has elements of the simple positivefeedback seen in the pheromone trails of Lasius antsand the aggregation of cockroaches. However, the fourphase decision-making process, the use of a quorumthreshold to decide whether to perform a tandem runsor a transport (Pratt 2005, in press; Pratt et al. 2002),and the fact that some ants find both nests and choosethe superior one (Mallon et al. 2001), makes thebehaviour of individual migrating ants more compli-cated than ‘simple rules of thumb’. Temnothorax antscombine elements of self-organization, whereby aglobal solution to the problem of finding a new nestemerges from the interactions of the multiple ants, witha sophisticated behavioural algorithm, whereby indi-vidual ants continually monitor the progress of theemigration and change their behaviour accordingly.
The detailed experimental understanding of Tem-nothorax migration has made it possible to determinethe behavioural algorithm followed by, and thecommunication pathways between the ants. Pratt et al.(2002, 2005) have, as new experimental data havebecome available, systematically refined this beha-vioural algorithm in order to capture everything that isknown about ant migration in a model (figure 6c). Theirapproach follows that used in modelling gene regulatory(von Dassow et al. 2000) and other complex networks(Kitano 2002). Once the behavioural algorithm isdeveloped, the role of its various components can betested. For example, Pratt et al. (2002) showed that therequirement that the nest site population reachesquorum before transport commences leads to areduction in incidence of colony splitting. Franks et al.(2003a,b) went on to show experimentally that the antsreduce the size of their quorum in situations wheremigration speed takes priority over the avoidance ofsplitting. Detailed behavioural algorithm models arethus a tool for reconciling individual and group levelcomplexity, allowing for meaningful analysis of howeach part of the algorithm contributes to overall systemfunction (Fewell 2003).
The construction of detailed models of the algor-ithms followed by individuals also allows for betweenspecies comparison. For example, Camazine et al.(1999), Seeley & Buhrman (2001), Seeley (2003) andSeeley & Visscher (2003) have studied the migration ofhoney bees and found that they use a similarcombination of positive feedback (dancing instead oftandem running) and quorum thresholds (Seeley &Visscher 2004) as Temnothorax. When algorithms aresimilar across very different species we can ask why theyhave evolved in so many different cases. What is it aboutthe combination of positive feedback and responsethresholds that produces effective collective decisionmaking? The power of the behavioural algorithmapproach is that the algorithm can be analysed andcompared across systems. Indeed, rather than simply

life history of a forager
fieldfield
scout inspector reactivatedforager
internallydriven
externallydrivennovice
foragerunemployed experienced
forager
employedforagerfind's
poorsource
find'spoor
source
find'spoor
sourcefind'spoor
source
spontuneouslysearches a source
searches a sourceusing external information
abandonsource usingexternal info
spontuneouslycheckknownsource
spontuneouslychecks known
source returnsfor
colony
followconfirminginformation
find'srich
source
find'srich
source
find'srich
sourcefind'srich
source
employedforager
(loading)
recruit
colony
exploration
return withouttrail laying
return withtrail laying
discoverfood?
food ingestion
able to ingestdesired volume?
yes
yes
no
no
follow(0,–)
follow(l,f)
follow(l,f)
search(l,f)
at nest(l,f)
at nest(l,f)
1-reject0,j1-reject0,i
find0,i
findi,i
findi,i
findj,i
findj,i
rejecti,j
rejecti,j
rejecti,jrecruiti
findj,ifindi,i
accepti
recruiti 1-quorummet
quorummet
1-getlost+getlost*losttrans
getlost*(1-losttrans)
1–rejecti,j
1–rejecti,j
1–rejecti,j
find0,j
arrive atnest i
arrive atnest j
arrive atnest j
arrive atnest j
arrive atnest j
find0,0
reject0,j reject0,i
getlost
getlost
searchexplore
searchassess
searchcanvas
pickedupassess
pickedupcanvas
searchcommitted
pickedupcommitted
1-reverse
reverse
pickupexplore
at nest(l,f)
at nest(l,f)
leadforward
(l,f)
transport(l,f)
reversetandem
(l,f)
search(l,f)
search(l,f)
carried(l,f)
carried(l,f)
carried(l,f)
search(0,–)
carried(0,–)
at nest(0,–)
stoptrans
1-stoptrans
(a) (c)
(b)
Figure 6. Algorithms for social insect behaviour. (a) The ‘simple rule of thumb’ used by Lasius niger ants when exploiting liquidfood sources (Detrain & Deneubourg 2002; from results of Mailleux et al. 2000). (b) Behaviour control structure of a honey beeforager. Depicted are the seven behavioural categories of foragers. The left part of the diagram represents internally drivencategories, the right part, the externally driven categories. Upon locating a rich source, a searching forager becomes employed,whereas upon locating a poor source (including no source), a searching forager returns to the hive and becomes unemployed (fordetails see Biesmeijer & de Vries 2001). (c) Model of the behaviour of Temnothorax ants when emigrating. Boxes representbehavioural states and arrows transitions between them, labels indicate measured probabilities (Pratt et al. 2005). Coloursindicate the four major levels of an ant’s commitment to a candidate nest site: exploration (blue), assessment (red), canvassing(amber) and commitment (green).
14 D. J. T. Sumpter Principles of collective animal behaviour
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
simulating algorithms in order to reproduce exper-iments, the algorithms can be studied to find out theprinciples that underlie them.
Before leaving the subject of individual complexity itis worth pointing out that, when viewed at certainspatial and temporal scales, very complex individualscan produce very simple group level dynamics,provided they exhibit a reasonable degree of indepen-dence. For example, though a highly complex algor-ithm may have brought each individual to town in thefirst place, the number of people passing by a point on aquiet shopping street during a 5 min interval is likely tobe randomly distributed. This prediction is based onthe ‘law of small numbers’, that independent lowfrequency events in a large population follow a Poissondistribution (Bortkiewicz 1898). While on very smalltime scales there are socially enforced gaps betweenpeople and on very large time scales there are patternsdetermined by shops opening and closing, on the timescale of an hour on a Monday morning passers-by do somore or less at random. Once a large number of factors
Phil. Trans. R. Soc. B (2006)
begin to influence behaviour, the complex begins to
seem simple again.
5. PRINCIPLES OF COLLECTIVE BEHAVIOURAs far as understanding collective animal behaviour I
have come full circle. First, I marvelled at the
wonderful patterns produced by animal groups, then
showed that some of these patterns could be explained
by simple mathematical models, but found myself back
at the beginning when we discovered the true complex-
ity of the individuals and the need for detailed
behavioural algorithms. These algorithms appear no
easier to understand than the phenomena they purport
to model and lack the elegance provided by self-
organization. There were, however, points on this
journey where it felt like progress was made: when
completely different systems seemed to be logically
equivalent and were given a new explanation by the
application of a mathematical model.

Principles of collective animal behaviour D. J. T. Sumpter 15
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
Similarities between the logical structure underlyingdifferent systems have led researchers to dream of aunifying theory for the study of complex and self-organized systems. The dream is to develop some sortof ultracalculus, a way of seeing clearly the conse-quences of a myriad of complex interactions (Strogatz2003). Currently, the only universal theorem of thistype is the central limit theorem, but it is precisely thosesystems consisting of non-independent individuals thatour ultracalculus should apply to. For Nicolis andPrigogine the unifying theory was the thermodynamicsof open systems; for Bak (1996) it was self-organizedcriticality and sand piles; for Sornette (2004) it is thegeneralization of the normal distribution to power lawdistributions; for Kauffman (1993) it is Booleannetworks; and for Wolfram (2002) it is cellularautomata. Elegant as these mathematical ideas are,none of them have proved truly universal, and moreimportantly, nor have they been shown to apply to largenumbers of biological systems. Experimental tests ofthese theories are few and far between.
My personal view is more pragmatic than thedevelopment of a universal theory or an ultracalculusof self-organization. Studying systems of collectiveanimal behaviour should proceed on a case-by-casebasis. For each particular system, we classify howindividuals interact with each other and build beha-vioural algorithms based on these observations. Thebehavioural algorithms are then the basis for math-ematical models. If a similar mathematical model hasbeen previously applied to another system, this helps usunderstand the behavioural algorithm and thus thesystem, but the equivalence of mathematical modelsalone should not guide the way in which we study ourchosen system. Through this approach, mathematicalmodels become a tool for investigating natural systemsand the fact that the same model is applicable to manydifferent systems is a happy co-incidence rather than aproof of universal laws.
The pragmatic approach does not deny that thereare strong similarities between very different systems.On the contrary, it is essential to such an approach thatsystems are classified in terms of their logical ormathematical similarities and differences. Theapproach I take now is to list some of the principlesfor the behavioural algorithms that produce collectiveanimal behaviour. This approach builds on the idea ofself-organization that many of an animal group’sactivities can be described in terms of three principles:positive feedback, negative feedback and the amplifi-cation of random fluctuations (Bonabeau 1997;Camazine et al. 2001). Here, I add to this list theprinciples of individual integrity; response thresholds;leadership; inhibition; redundancy; synchronizationand selfishness. My current list is not intended asexhaustive, but it does include many commonlyobserved features of collective animal behaviour. Theultimate aim is to find a set of principles on which thebehavioural algorithms followed by individuals arebuilt. These principles should be both empirical, i.e.describe behaviour that really does occur, and suffi-ciently abstract that mathematical models based onthese principles can be developed and studied in a waythat leads to insight into a number of different systems.
Phil. Trans. R. Soc. B (2006)
Bearing in mind that individuals do not follow onlysimple rules, it is important that we do not think ofthese principles in isolation. Indeed, we shouldconsider how these different principles interact witheach other to produce collective patterns. For example,how does individual integrity mix with positive feed-back in allowing information about food sources to flowquickly through a honey bee colony without the colonylosing the ability to discover new sources? Or, how cansynchronization of mating fireflys occur when it is tothe advantage of one firefly to cheat by flashing fasterthan the others? Many of the big questions for thefuture of collective animal behaviour concern howthese principles fit together to generate complexcollective patterns.
(a) Integrity and variability
Each of the animals in a group is different, in terms oftheir genes and/or their previous experience. Forexample, if every bee always collected the same typeof food from the same place then their colony’snutritional needs could not be met. Worse still, whenthe uniquely selected food source is depleted, flow offood into the colony stops until the next food source isfound. Such a situation is avoided in honey bee coloniesby a high degree of individual variation. From only oneweek old, before they have left the hive for the first time,honey bees have different levels of response to sucrose,which later in life determines their propensity to collectwater, nectar and pollen (Pankiw & Page 2000). Honeybees and other social insects are highly variable in thedirection, intensity and focus of food collection andother tasks ( Jeanne 1988). Sometimes this variabilityalone is sufficient to produce collective patterns. Forexample, the circular structure of M. barbarus craterswas due to each individual choosing a random directionby which to leave the nest. Even when not all activitiesare carried out independently, individual variability isof central importance to ensuring that differentsolutions to a problem are explored.
The importance of individual variability in humansociety is highlighted by an observation by Galton(1907). He examined 800 entries into a ‘guess theweight of the ox competition’, where a crowd offairgoers each paid a small amount to guess howmuch a large ox would weigh after slaughter, with themost accurate guess winning a prize. Although theguesses had a wide variation, differing significantlyfrom a Normal distribution, the average guess was only1 pound (450 g) less than the 1197 pounds (544.5 kg)that the ox weighed. Acting independently, the crowd‘knew’ the weight of the ox. There are many suchexamples of collective accuracy: ask the audience on‘Who wants to be a millionaire’; the accurate predictionof American presidential elections by betting; and theGoogle search engine using links to a webpage tomeasure its popularity are just some (Surowiecki2004). In all animal groups, high inter-individualvariation can provide a continual supply of newsolutions to the problems the group aims to solve.
(b) Positive feedback
Positive feedback is the amplification of events throughrecruitment or reinforcement (Bonabeau et al. 1997;

0 10 20 30 40 50 60 70 80 90
00.10.20.30.40.50.60.70.80.91.0
prob
abili
ty o
f tr
ansp
ortin
g
nest population0 5 10 15
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
prop
ortio
n lo
okin
g up
size of crowd
5 10 150
0.0010.0020.0030.0040.0050.0060.0070.0080.0090.010
prob
abili
ty o
f le
avin
g
number of cockroaches in the shelter
(a) (b)
(c) 0.4
0.3
0.2
0.1
00 2 4 6 8
number of ants A
indi
vdua
l pro
babi
lity
of le
avin
gp L
(s–
1 )
(d )
Figure 7. Examples of response thresholds. (a) The probability of a recruiting Temnothorax albipennis ant performing a transportrather than a tandem run, as a function of the mean nest population (N ) of the destination site on her immediately previousvisit there (data from Pratt 2005, in press). The fitted line is N6:3=ð20:26:3CN6:3Þ. (b) The mean proportion of passer-by’slooking up as a function of the size of a group (C ) of people stood in the street looking up at a sixth floor window (taken fromMilgram 1992). Fitted line is 0:92!C1:04=ð1:221:04CC1:04Þ, giving a threshold of 1.22. (c) The probability of a cockroachleaving a shelter as a function of the number of other cockroaches (C) on the site (taken from Ame et al. 2004). Fitted line is0:06!1=ð6CC2Þ. (d ) The probability per second of an ant moving away from a stopped group of ants as a function of thenumber of stopped ants (A; taken from Depickere et al. 2004). Fitted line is 0:35AK2:125.
16 D. J. T. Sumpter Principles of collective animal behaviour
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
Camazine et al. 2001). A cockroach stops in a shelter,
another one pauses nearby. An ant finds a food source,
another one follows her trail there. A fish turns to the
left, its neighbour follows soon after. A few people
recommend a particular brand of video recorder,
others go out and buy it. As such imitation or
recruitment behaviour continues the number perform-
ing an activity explodes exponentially. An isolated
behaviour is quickly subsumed by a mass of similar
behaviours. Positive feedback is the best studied
component of collective animal behaviour and we
have already discussed many of the collective patterns it
can produce.
While individual integrity generates new group level
solutions, positive feedback spreads this information
quickly through the group. For example, an ant finding
a food source relies on the particular search path of that
ant, but the trail it leaves on the way home is the start of
a positive feedback loop that homogenizes the beha-
viour of those following the trail. Followers submit their
own integrity to the discoveries of others. Too much
positive feedback can lead to suboptimal solutions
when conditions change, such as when ants stick to an
established a trail even when a shortcut is introduced
(Beckers et al. 1992). Successful problem solving by
collective behaviour often involves striking the correct
balance between individual variation and positive
Phil. Trans. R. Soc. B (2006)
feedback. Information should spread but also be keptup to date by new discoveries.
(c) Negative feedback
If positive feedback builds up a collective pattern then itis negative feedback that stabilizes it. For example,once lots of ants are collecting from a food source, newarrivals will find it hard to collect food and searchelsewhere. Even if the food source is unlimited, thecolony is of limited size and the number of ants visitingthe feeder will stabilize once every available foragingant is collecting food. Negative feedback leads tohomeostasis, stable output in the face of varied input.For the ants, changes in food distribution leads to asmooth adjustment of the distribution of ants betweenfood sources.
(d) Response thresholds
Animals often change their behaviour in response to astimulus reaching some threshold. For example,bumble bees begin fanning (to cool down the nest)when the temperature concentration inside the nestexceeds a particular threshold level, this level offanning often being variable between individuals(Weidenmuller 2004). Threshold responses are alsoseen in between individual interactions. Figure 7 givesfour examples of response thresholds where the

Principles of collective animal behaviour D. J. T. Sumpter 17
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
stimulus is other individuals. For Temnothorax ants thestimulus is the density of ants within a nest cavity(figure 7a). When the density reaches at least 20.2 antsin a 24 cm2 nest, the ants switch from tandem runrecruitment to transporting (Pratt 2005, in press). Inthis sense the response threshold acts as a quorum;above the quorum a more rapid form of recruitmentbegins (Pratt et al. 2002).
Milgram et al. (1969), reported in Milgram (1992),planted a stimulus group of people, all of whom lookedup at a supposed point of interest on the pavement on abusy street. The proportion of naıve passers-by wholooked up at the point was then observed as a functionof the size of the stimulus group (figure 7b). Theproportion of those looking up increased as a functionof group size in a form similar to that seen in theresponse of the ants to nest mates. The larger the groupthe larger the probability of stopping. The samebehaviour is observed in ants (figure 7c) and cock-roaches (figure 7d ). In these cases the amount of timespent sitting still increases as a threshold like functionof group size. In all these cases, response thresholds caninteract with positive feedback to generate localaggregations. If only one person stops in the streetthere is only a 40% chance of another following theirgaze and a group is unlikely to build up. If by chancefive people stop and look up then the probabilityincreases to 80% and the group has a higher probabilityof becoming stable, even in the absence of any truestimulus.
(e) LeadershipThe notion of self-organization seems somehowincompatible with the notion of leadership. In insectsocieties, however, there are some key individuals thatcatalyse and organize the group (Robson & Traniello1999). A classic example of catalyst behaviour is theshaking signal in honey bees. When foraging begins inthe morning some of the first foraging bees to find foodshake the other bees deep in the hive (Seeley 1995),serving to inform those bees that a period of greateractivity is about to begin (Seeley et al. 1998). Thedistribution of number of shaking signal bouts acrossindividual bees during their lifetime is highly skewed,indicating that it is certain bees that act as catalysts(Biesmeijer 2003). Often leadership is assumed by thepossession of particular information. In fish, a smallnumber of informed individuals can lead the migrationof larger numbers of individuals (Reebs 2000). Couzinet al. (2005) used an SPP model to show that the largerthe group, the smaller the proportion of informedindividuals required to lead it. This result relies on thefact that followers are subject to positive feedback. As afew individuals follow a leader, other individuals followthese followers and the group takes a single direction.Rather than being opposites, self-organized positivefeedback and leadership are instead powerfully com-bined to produce co-ordinated collective migration.
(f) InhibitionMembers of a group exhibiting one type of behaviourcan inhibit the behaviour of others. When thisinhibition is passive it is indistinguishable from negativefeedback. For example, as ants are recruited to one
Phil. Trans. R. Soc. B (2006)
food source the number available to visit another isreduced. Inhibition can also be active, wherebymembers of one group actively try to reduce anothertype of behaviour. For example, when choosing a newnest Temnothorax albipenis ants who have beguntransporting to one nest site will, if they encounter analternative nest site that they rank as inferior, begintransporting away from that nest to the nest they firsttransported to (Mallon et al. 2001; Pratt et al. 2002). If,as often happens during Temnothorax emigrations,transport begins to more than one potential nest site,these between site transports provide between siteinhibition. Transports away from a potential nestsite will reduce the population and the probability thenest will reach quorum, and thus the incidence ofsplitting between nest sites.
(g) Redundancy
Very little is known about the value of redundancy inanimal groups or even our own society, but it is oftenimplicated in the observation that, as Francis Ratniekshas put it, ‘insect societies never crash’. Unlikecomputers, which are constructed of many specializedand essential components, insect societies consist, withthe possible exception of the queen, of vast numbers ofreplaceable units: 20–30% of honey bee workers rest atany one time (Seeley 1995). If one type of honey beeworkers, for example foragers, are removed, these arerapidly replaced by a new cohort of younger bees(Lindauer 1952). The apparent redundancy in thesystem allows it to continue to function even whenfaced with a major reduction in its workforce.
(h) SynchronizationAudience applause and other synchronization phenom-ena are achieved through small adjustments byindividuals of their own frequency towards that ofsome local average. Essentially, synchronization is anexample of positive feedback in time rather than space.The coupling of synchronization in time with positivefeedback in space may have an important role indetermining the productivity of animal groups. Forexample, some ant colonies synchronize bouts ofresting and activity (Cole 1991). If by all being activeat the same time the ants can disproportionablyincrease their ‘output’ (as in figure 4b), then beingsynchronized will see an overall increase in outputcompared to constant activity levels.
(i) SelfishnessTucked away here, as the last subheading in a sectionon components of collective behaviour, is the questionthat would spring to many biologists’ mind even beforeI began giving different examples of collective animalbehaviour: ‘how did these collective behaviours evolvethrough natural selection?’ I have made no attempt upto now to address the problem of the ‘ultimate’ reasonfor cockroach aggregation, fish schools, ant trailnetworks or audience applause. In the light of mydiscussion of a universal theorem this omission may beconsidered neglectful. There is only one theory ofbiological systems that has any claim on universalityand that is natural selection. In relation to group co-operation, natural selection produces Hamilton’s rule:

18 D. J. T. Sumpter Principles of collective animal behaviour
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
the relatedness of the individual that profits from thealtruistic act of the focal individual must be higher thanthe cost/benefit ratio this act imposes (Hamilton 1964).All collective animal behaviour involves some form ofco-operation, in the sense that individuals interact toform a pattern that is larger in scale than oneindividual. Hamilton’s rule can explain many of thesophisticated forms of co-operation that have evolvedin social insects, where inter-individual relatedness ishigh (Trivers & Hare 1976; Crozier & Pamilo 1996).Similar reasoning often explains helping behaviour inmammals and birds (Griffin & West 2003). However,many studies have failed to detect the levels ofrelatedness predicted for highly co-operative insectsocieties (reviewed by Korb & Heinze 2004), and at alllevels of biological organization helping behaviour canbe uncorrelated with relatedness (Griffin & West 2002).
In cases where collective patterns are generated byindividuals with low inter-individual relatedness, itcould be the collective properties of the animal groupsthat are subject to natural selection. For example, ifworking as part of a group means that the groupbecomes more than the sum of its parts, then unrelatedindividuals can increase their own fitness by being partof the group. Also, genetically diverse groups maybenefit from inter-individual variability in termsof better informed collective decisions (Fuchs &Schade 1994; but see evidence to the contrary inNeumann & Moritz 2000) and disease resistance (Baar& Schmid-Hempel 1999). There is observationalevidence for such possibilities; many of the behaviouralinteractions observed in ant colonies, such as positivefeedback and threshold response, are also seen incockroaches (Deneubourg et al. 2002) and locusts(Simpson et al. 1999). The problem with invokingnatural selection on the collective properties of groupsis that individuals should act to maximize their ownfitness. If one individual can benefit from the otherindividuals’ co-operation, without paying any costassociated with the resulting collective pattern, then itcan pass on its genes more effectively than those payingthe cost. Ultimately, such reasoning can predictchanges in the shape or even the collapse of collectivepatterns that can be exploited.
Collapse of co-operation need not always occur justbecause individuals are expected to act only in pursuitof their own reproductive interests or economic gain.The last thirty years has seen an explosion of theoriesand experimental tests of theories of why selfishindividuals ‘apparently’ co-operate: aggregations mayresult from individuals attempting to put othersbetween themselves and danger to create a selfishherd (Hamilton 1971) or to minimize the cost ofdisintegration (Parrish & Edelstein-Keshet 1999); co-operation can evolve where individuals interact repeat-edly with, or are spatially located close to, each other(Nowak & May 1992; Doebeli & Hauert 2005); and insome cases, such as worker policing by honey bees(Ratnieks 1988; Ratnieks & Visscher 1989), groupmembers actively search out and stop cheaters. In allcases, the argument for why acting alone or cheatingdoes not out-compete co-operation first requires a fullunderstanding of the other components of collectivebehaviour. Likewise, rather than being an alternative to
Phil. Trans. R. Soc. B (2006)
the mechanistic approach of studying the componentsof collective behaviour, the selfishness idea provides uswith useful constraints on the possible behaviouralalgorithms evolved by individuals in groups.
6. VISION OF THE FUTUREThis paper is part of a series of special issues by youngscientists looking into the future of their fields. In orderto think about the future I started by reading the booksby the pioneers of self-organization—von Bertanfly,Weiner and Nicolis & Prigogine—to find out how theysaw the future when they first had the ideas that haveinspired our work today. What struck me most was howmuch their vision for the future was also the vision forthe future that is common to all aspects of modernbiology, from post-human genome genetics to biodi-versity. The emphasis then was on ‘systems biology’, onunderstanding how different parts of biological systemswork together, moving away from reductionism andestablishing principles for biological organization. Pickup a recent copy of Science or Nature and these sameissues fill the discussion pages. How do we integrate allwe know about the parts of biological systems tounderstand how they function at a collective level?
At first thought, it sounds depressing that the visionso many of us have for the future is the same as that ofscientists writing 30 or even 50 years ago. It appearsthat the pioneers of self-organization were wrong whenthey proclaimed the immediate future as a future of‘systems biology’. Instead, biology became a field ofsuper-efficient stamp collecting with research projects,most notably the genome projects, mapping out thedetailed structure of the units making up the biologicalworld. 30 years on we have a lot more information, butwe are only a little wiser as to how we should put it alltogether. Gradually, however, we are beginning tounderstand how the parts of biological systems makeup the whole. The examples I have presented hereillustrate how through a combination of mathematicalmodelling, experimental manipulation and observationwe can begin to understand collective animal beha-viour. Similar progress has been made in the study ofother complex biological systems from human organs(Hunter & Borg 2003) to ecosystems (Levin 2000).Often such understanding relies on technology, such asdigital tracking and computer simulations, that was notavailable even 10 years ago. The technological toolsmay finally be available for us to begin to disentanglebiological complexity.
So my primary vision for the future is the further useof technology and mathematics for finally doing‘systems biology’. We now have a large number of thetechnological tools for performing data analysis andbuilding detailed mathematical models. The work Ihave described here has applied these tools mainly tothe study of insect societies, but they can also be used tolook at locust swarms, fish schools, human crowds,commercial farm animals and many other animalgroups. The immediate future should see greateremphasis on application of some of the theoriesdeveloped over the last 30 years. With more appli-cations will also come a greater pragmatism on the part

Principles of collective animal behaviour D. J. T. Sumpter 19
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
of the theoreticians and an increased understanding ofthe use of mathematics on the part of experimentalists.
I hope the term self-organized will be replacedgradually by something akin to the principles I describehere. Describing a system as self-organized tells us littleabout how it actually works, while providing a slightsense of mysticism. From a practical point of view it isbetter to say that the behaviour of a system arises from aparticular combination of, for example, positive feed-back, response thresholds and negative feedback. Suchdescription allows for more detailed between systemcomparisons, not only between different types ofcollective animal behaviour but across all complexsystems. In this article I have avoided using anymathematics in the main text, but nearly all of thesystems I describe have been understood with the helpof a mathematical model of some sort. I would like tosee the development of mathematics that is appropriatefor describing different principles of collective beha-viour, but does not insist that the whole world should fitin to a certain type of equation. If there are so manyprinciples underlying collective behaviour it is unlikelythat a single formalism can describe them all. Instead,mathematics should help us formulate and testhypotheses, but our understanding of experimentalresults should be brought together by a common non-mathematical language.
A slightly more controversial vision I have for thefuture is that the division between evolutionary biologyand mechanistic biology will narrow. At presentresearchers can often be classified as looking at ‘why’questions of the evolution of collective behaviour andthe ‘how’ questions of the way animal groups function.This division is, however, narrowing as evolutionarybiologists become interested in how, for example,benefits of being in a group changes with group size.This important function in calculating optimal groupjoining strategy can only be found by detailed knowl-edge of how a group is made up of its parts. Likewise,biologists whose interest in collective behaviour comesfrom a background in mathematics or physics cannotignore the importance of selfishness behaviour in groupsituations. The view I have taken in this article is thatthe primary aim of the study of collective animalbehaviour is to determine the algorithms that producethe collective behaviour and to understand theprinciples that underlie these algorithms. Naturalselection and the ultimate reasons for and evolutionaryorigin of this behaviour becomes just one of theprinciples in obtaining such understanding.
If natural selection is to lose its central importance inanimal behaviour, then rationality is also to lose its gripon the study of human behaviour. Rationality has longbeen considered the null model for economics (Popper1957), and has assumed importance in the under-standing of how humans will behave in groupsituations. Like natural selection, rationality is alsoonly one of the principles that govern collectivebehaviour in humans (Schelling 1978; Milgram1992). The positive feedback in consumer choice, thesynchronization of applause and the threshold responseto a crowd are also important principles. I haveendeavoured in this article to show that many collectivehuman behaviours are similar to their animal
Phil. Trans. R. Soc. B (2006)
counterparts. In fact, they are so similar that thesame mathematical models can be used to describecollective patterns in both humans and animals. Suchunderstanding could be invaluable in designing thespaces in which we live and work, or in developingproduct advertising campaigns. It would not tell uswhat it feels like to be part of a football crowd, but itcould tell us how to construct an easily evacuatedfootball ground. While I can never be sure whatstudents might talk about together after their morninglectures, I might one day be able to predict how longthey have to queue for a cup of coffee.
I would like to thank Madeleine Beekman, David Broom-head, Anders Johansson, Stephen Pratt, Francis Ratnieks,Max Reuter, Nicole Saam and Lovisa Sumpter for manyinteresting conversations that have contributed to this article.Thank you to Hedi Emmerig and Iain Couzin for carefulreadings, and to the two reviewers for their comments. Thisresearch was funded by the Royal Society.
REFERENCESAme, J. M., Rivault, C. & Deneubourg, J. L. 2004 Cockroach
aggregation based on strain odour recognition. Anim.Behav. 68, 793–801. (doi:10.1016/j.anbehav.2004.01.009)
Anderson, C. & McShea, D. W. 2001 Individual versus socialcomplexity, with particular reference to ant colonies. Biol.Rev. 76, 211–237. (doi:10.1017/S1464793101005656)
Ashby, W. R. 1947 Principles of the self-organizing dynamicsystem. J. Gen. Psychol., 125–128.
Baar, B. & Schmid-Hempel, P. 1999 Experimental variationin polyandry affects parasite load and fitness in a bumblebee. Nature 397, 151–153. (doi:10.1038/16451)
Bak, P. 1996 How nature works: the science of self-organizedcriticality. New York: Copernicus Books.
Beckers, R., Goss, S., Deneubourg, J. L. & Pasteels, J. M.1989 Colony size, communication and ant foragingstrategy. Psyche 96, 239–256.
Beckers, R., Deneubourg, J. L. & Goss, S. 1992 Trails andU-turns in the selection of a path by the ant Lasius–Niger.J. Theor. Biol. 159, 397–415.
Beckers, R., Deneubourg, J. L. & Goss, S. 1993 Modulationof trail laying in the ant Lasius–Niger (hymenoptera,formicidae) and its role in the collective selection of a foodsource. J. Insect Behav. 6, 751–759. (doi:10.1007/BF01201674)
Beekman, M., Sumpter, D. J. T. & Ratnieks, F. L. W. 2001Phase transition between disordered and ordered foragingin Pharaoh’s ants. Proc. Natl Acad. Sci. USA 98,9703–9706. (doi:10.1073/pnas.161285298)
Biesmeijer, J. C. 2003 The occurrence and context of theshaking signal in honey bees (Apis mellifera) exploitingnatural food sources. Ethology 109, 1009–1020. (doi:10.1046/j.0179-1613.2003.00939.x)
Biesmeijer, J. C. & de Vries, H. 2001 Exploration andexploitation of food sources by social insect colonies: arevision of the scout-recruit concept. Behav. Ecol. Socio-biol. 49, 89–99. (doi:10.1007/s002650000289)
Boi, S., Couzin, I. D., Del Buono, N., Franks, N. R. &Britton, N. F. 1999 Coupled oscillators and activity wavesin ant colonies. Proc. R. Soc. B 266, 371–378. (doi:10.1098/rspb.1999.0647)
Bonabeau, E., Theraulaz, G., Deneubourg, J. L., Aron, S. &Camazine, S. 1997 Self-organization in social insects.Trends Ecol. Evol. 12, 188–193. (doi:10.1016/S0169-5347(97)01048-3)

20 D. J. T. Sumpter Principles of collective animal behaviour
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
Bonabeau, E., Theraulaz, G., Deneubourg, J. L., Franks,
N. R., Rafelsberger, O., Joly, J. L. & Blanco, S. 1998 A
model for the emergence of pillars, walls and royal
chambers in termite nests. Phil. Trans. R. Soc. B 353,
1561–1576. (doi:10.1098/rstb.1998.0310)
Bortkiewicz, L. J. 1898 The law of small numbers.Buck, J. & Buck, E. 1976 Synchronous fireflies. Sci. Am. 234,
74–85.
Camazine, S., Visscher, P. K., Finley, J. & Vetter, R. S. 1999
House-hunting by honey bee swarms: collective decisions
and individual behaviors. Insect. Soc. 46, 348–360.
(doi:10.1007/s000400050156)
Camazine, S., Deneubourg, J. L., Franks, N. R., Sneyd, J.,
Theraulaz, G. & Bonabeau, E. 2001 Self-organization inbiological systems. Princeton studies in complexity. Princeton,
NJ: Princeton University Press.
Chretien, L. 1996 Organisation spatiele du materiel prove-
nant de l’excavation du nid chez Messor barbarus et des
cadavres d’ouvrieres chez Lasius niger (Hymenoptera:
Formicidae). In Center for nonlinear phenomena and complex
systems, Ph.D. thesis, Universite Libre de Bruxelles,
Brussles.
Cole, B. J. 1991 Short-term activity cycles in ants: generation
of periodicity through worker interaction. Am. Nat. 137,
244–259. (doi:10.1086/285156)
Collett, M., Despland, E., Simpson, S. J. & Krakauer, D. C.
1998 Spatial scales of desert locust gregarization. Proc.
Natl Acad. Sci. USA 95, 13 052–13 055. (doi:10.1073/
pnas.95.22.13052)
Couzin, I. D. & Krause, J. 2003 Self-organization and
collective behavior in vertebrates. Adv. Study Behav. 32,
1–75. (doi:full_text)
Couzin, I. D., Krause, J., James, R., Ruxton, G. D. & Franks,
N. R. 2002 Collective memory and spatial sorting in
animal groups. J. Theor. Biol. 218, 1–11. (doi:10.1006/jtbi.
2002.3065)
Couzin, I. D., Krause, J., Franks, N. R. & Levin, S. A. 2005
Effective leadership and decision-making in animal
groups on the move. Nature 433, 513–516. (doi:10.1038/
nature03236)
Crozier, R. H. & Pamilo, P. 1996 Evolution of social insect
colonies: sex allocation and kin selection. Oxford series in
ecology and evolution. Oxford, UK: Oxford University
Press.
Czirok, A. & Vicsek, T. 2000 Collective behavior of
interacting self-propelled particles. Physica A 281, 17–29.
Czirok, A., Barabasi, A. L. & Vicsek, T. 1999 Collective
motion of self-propelled particles: kinetic phase transition
in one dimension. Phys. Rev. Lett. 82, 209–212.
Deneubourg, J. L. 1977 Application de l’ordre par fluctu-
ations a la description de certaines etapes de la
construction du nid chez les termites. Insect. Soc. 24,
117–130. (doi:10.1007/BF02227166)
Deneubourg, J. L. & Goss, S. 1989 Collective patterns and
decision-making. Ethol. Ecol. Evol. 1, 295–311.
Deneubourg, J. L., Goss, S., Franks, N. & Pasteels, J. M.
1989 The blind leading the blind: modeling chemically
mediated army ant raid patterns. J. Insect Behav. 2,
719–725. (doi:10.1007/BF01065789)
Deneubourg, J. L., Lioni, A. & Detrain, C. 2002 Dynamics of
aggregation and emergence of cooperation. Biol. Bull. 202,
262–267.
Depickere, S., Fresneau, D. & Deneubourg, J. L. 2004
Dynamics of aggregation in Lasius niger (Formicidae):
influence of polyethism. Insectes Sociaux 51, 81–90.
Detrain, C. & Deneubourg, J. L. 1997 Scavenging by Pheidole
pallidula: a key for understanding decision-making systems
in ants. Anim. Behav. 53, 537–547. (doi:10.1006/anbe.
1996.0305)
Phil. Trans. R. Soc. B (2006)
Detrain, C. & Deneubourg, J. L. 2002 Complexity of
environment and parsimony of decision rules in insect
societies. Biol. Bull. 202, 268–274.
Detrain, C., Deneubourg, J. L. & Pasteels, J. M. 1999
Decision-making in foraging by social insects. In Infor-
mation processing in social insects (ed. C. Detrain, J. L.
Deneubourg & J. M. Pasteels), pp. 331–354. Basel:
Birkhauser Verlag.
Doebeli, M. & Hauert, C. 2005 Models of cooperation
based on the prisoner’s dilemma and the snowdrift game.
Ecol. Lett. 8, 748–766. (doi:10.1111/j.1461-0248.2005.
00773.x)
Farkas, I., Helbing, D. & Vicsek, T. 2002 Social behaviour:
Mexican waves in an excitable medium—The stimulation
of this concerted motion among expectant spectators is
explained. Nature 419, 131–132. (doi:10.1038/419131a)
Farkas, I., Helbing, D. & Vicsek, T. 2003 Human waves in
stadiums. Physica A—Stat. Mech. Appl. 330, 18–24.
(doi:10.1016/j.physa.2003.08.014)
Fewell, J. H. 2003 Social insect networks. Science 301,
1867–1870. (doi:10.1126/science.1088945)
Franks, N. R., Bryant, S., Griffiths, R. & Hemerik, L. 1990
Synchronization of the behaviour within nests of the ant
Lepothorax acervorum (Fabricius): I. Discovering the
phenomenon and its relation to the level of starvation.
Bull. Math. Biol. 52, 597–612. (doi:10.1016/S0092-
8240(05)80368-4)
Franks, N. R., Gomez, N., Goss, S. & Deneubourg, J. L.
1991 The blind leading the blind in army ant raid patterns:
testing a model of self-organization (Hymenoptera:
Formicidae). J. Insect Behav. 4, 583–607. (doi:10.1007/
BF01048072)
Franks, N. R., Dornhaus, A., Fitzsimmons, J. P. & Stevens,
M. 2003a Speed versus accuracy in collective decision
making. Proc. R. Soc. B 270, 2457–2463. (doi:10.1098/
rspb.2003.2527)
Franks, N. R., Mallon, E. B., Bray, H. E., Hamilton, M. J. &
Mischler, T. C. 2003b Strategies for choosing between
alternatives with different attributes: exemplified by
house-hunting ants. Anim. Behav. 65, 215–223. (doi:10.
1006/anbe.2002.2032)
Fuchs, S. & Schade, V. 1994 Lower performance in honey
bee colonies of uniform paternity. Apidologie 25, 155–168.
Galton, F. 1907 Vox populi. Nature 75, 450–451.
Gregoire, G. & Chate, H. 2004 Onset of collective and
cohesive motion. Phys. Rev. Lett., 92.
Gregoire, G., Chate, H. & Tu, Y. H. 2003 Moving and staying
together without a leader. Physica D—Nonlin. Phenom.
181, 157–170. (doi:10.1016/S0167-2789(03)00102-7)
Griffin, A. S. & West, S. A. 2002 Kin selection: fact and
fiction. Trends Ecol. Evol. 17, 15–21. (doi:10.1016/S0169-
5347(01)02355-2)
Griffin, A. S. & West, S. A. 2003 Kin discrimination and the
benefit of helping in cooperatively breeding vertebrates.
Science 302, 634–636. (doi:10.1126/science.1089402)
Gueron, S., Levin, S. A. & Rubenstein, D. I. 1996 The
dynamics of mammalian herds: from individual to
aggregations. J. Theor. Biol. 182, 85–98. (doi:10.1006/
jtbi.1996.0144)
Hamilton, W. D. 1964 The genetical evolution of social
behaviour. I, II. J. Theor. Biol. 7, 1–52. (doi:10.1016/0022-
5193(64)90038-4)
Hamilton, W. D. 1971 Geometry for the selfish herd.
J. Theor. Biol. 31, 295–311. (doi:10.1016/0022-5193(71)
90189-5)
Helbing, D. & Huberman, B. A. 1998 Coherent moving
states in highway traffic. Nature 396, 738–740. (doi:10.
1038/25499)

Principles of collective animal behaviour D. J. T. Sumpter 21
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
Helbing, D. & Molnar, P. 1995 Social force model for
pedestrian dynamics. Phys. Rev. E 51, 4282–4286.
(doi:10.1103/PhysRevE.51.4282)
Helbing, D. & Treiber, M. 1998 Traffic theory—jams, waves,
and clusters. Science 282, 2001–2003. (doi:10.1126/
science.282.5396.2001)
Helbing, D., Farkas, I. & Vicsek, T. 2000 Simulating
dynamical features of escape panic. Nature 407,
487–490. (doi:10.1038/35035023)
Hoare, D. J., Couzin, I. D., Godin, J. G. J. & Krause, J. 2004
Context-dependent group size choice in fish. Anim. Behav.
67, 155–164. (doi:10.1016/j.anbehav.2003.04.004)
Holldobler, B. & Wilson, E. O. 1990 The ants. Cambridge,
MA: Belknap Press of Harvard University Press.
Hunter, P. J. & Borg, T. K. 2003 Integration from proteins to
organs: the physiome project. Nat. Rev. (Mol. Cell Biol.) 4,
237–243. (doi:10.1038/nrm1054)
Jackson, D. E., Holcombe, M. & Ratnieks, F. L. W. 2004
Knowing which way to go—trail geometry gives polarity to
ant foraging networks. Nature 432, 907–909. (doi:10.
1038/nature03105)
Jackson, D. E., Martin, S. J., Holcombe, M., Ratnieks, F. L.
W. In press. Longevity and detection of persistent foraging
trails in Pharaoh’s ants, Monomorium pharaonis (L.). Anim.
Behav.
Jeanne, R. L. (ed.) 1988 Interindividual behavioral variability
in social insects. Boulder, CO: Westview Press.
Jeanson, R., Deneubourg, J. L. & Theraulaz, G. 2004
Discrete dragline attachment induces aggregation in
spiderlings of a solitary species. Anim. Behav. 67,
531–537. (doi:10.1016/j.anbehav.2003.06.013)
Jeanson, R., Rivault, C., Deneubourg, J. L., Blanco, S., Jost,
C. & Theraulaz, G. 2005 Self-organized aggregation in
cockroaches. Anim. Behav. 69, 167–180. (doi:10.1016/
j.anbehav.2004.02.009)
Kauffman, S. A. 1993 The origins of order. Oxford, UK:
Oxford University Press.
Kitano, H. 2002 Computational systems biology. Nature 420,
206–210. (doi:10.1038/nature01254)
Korb, J. & Heinze, J. 2004 Multilevel selection and social
evolution of insect societies. Naturwissenschaften 91,
291–304. (doi:10.1007/s00114-004-0529-5)
Kuramoto, Y. 1975 Self-entrainment of a population of
coupled oscillators. In Int. Symp. on Mathematical Problems
in Theoretical Physics (ed. H. Araki), vol. 39. Berlin:
Springer.
Kuramoto, Y. 1984 Chemical oscillations, waves and turbulence.
Berlin: Springer.
Levin, S. A. 2000 Fragile dominion: complexity and the
commons. Reading, MA: Helix books.
Lindauer, M. 1952 Ein Beitrag zur Frage der Arbeitsteilung
im Bienenstaat. Z. Vergl. Physiol. 34, 299–345. (doi:10.
1007/BF00298048)
Mackinson, S. 1999 Variation in structure and distribution of
pre-spawning Pacific herring shoals in two regions of
British Columbia. J. Fish Biol. 55, 972–989.
Mailleux, A. C., Jean-Louis, D. & Detrain, C. 2000 How do
ants assess food volume? Anim. Behav. 59, 1061–1069.
Mallon, E. B., Pratt, S. C. & Franks, N. R. 2001 Individual
and collective decision-making during nest site selection
by the ant Leptothorax albipennis. Behav. Ecol. Sociobiol. 50,
352–359. (doi:10.1007/s002650100377)
Milgram, S. 1992 The individual in the social world. New York:
McGraw-Hill.
Milgram, S. & Toch, H. 1969 Collective behaviour: crowds
and social movements. In The handbook of social psychology
(ed. G. Lindzey & E. Aronson), vol. IV. Reading, MA:
Addison-Wesley.
Phil. Trans. R. Soc. B (2006)
Milgram, S., Bickman, L. & Berkowitz, L. 1969 Note on thedrawing power of crowds of different size. J. Pers. Soc.Psychol. 13, 79–82.
Moglich, M. 1978 Social organization of nest emigration inLeptothorax (Hym., Form.). Insect. Soc. 25, 205–225.(doi:10.1007/BF02224742)
Neda, Z., Ravasz, E., Brechet, Y., Vicsek, T. & Barabasi, A. L.2000a The sound of many hands clapping. Nature 403,849. (doi:10.1038/35002660)
Neda, Z., Ravasz, E., Vicsek, T., Brechet, Y. & Barabasi, A. L.2000b Physics of the rhythmic applause. Phys. Rev. E 61,6987–6992. (doi:10.1103/PhysRevE.61.6987)
Neumann, P. & Moritz, R. F. A. 2000 Testing geneticvariance hypotheses for the evolution of polyandry in thehoneybee (Apis mellifera capensis Escholtz). Insect. Soc. 41,271–279.
Nicolis, G. & Prigogine, I. 1977 Self-organization in non-equilibrium systems. New York: Wiley.
Nowak, M. A. & May, R. M. 1992 Evolutionary gamesand spatial chaos. Nature 359, 826–829. (doi:10.1038/359826a0)
Okubo, A. 1986 Dynamical aspects of animal grouping. Adv.Biophys. 22, 1–94. (doi:10.1016/0065-227X(86)90003-1)
Ormerod, P. 1998 Butterfly economics. New York: Pantheonbooks.
Pankiw, T. & Page, R. E. 2000 Response thresholds tosucrose predict foraging division of labor in honeybees.Behav. Ecol. Sociobiol. 47, 265–267. (doi:10.1007/s002650050664)
Parrish, J. K. & Edelstein-Keshet, L. 1999 Complexity,pattern, and evolutionary trade-offs in animal aggregation.Science 284, 99–101.
Parrish, J. K., Viscido, S. V. & Grunbaum, D. 2002 Self-organized fish schools: An examination of emergentproperties. Biol. Bull. 202, 296–305.
Partridge, B. L. J. 1982 The structure and function of fishschools. Scientific American 246.
Partridge, B. L. J., Johansson, J. & Kalisk, J. 1983 Structure ofschools of giant bluefin tuna in Cape Cod Bay. Environ.Biol. Fish. 9, 253–262.
Popper, K. 1957 The poverty of historicism. London/USA:Routledge/Abingdon.
Pratt, S. C. 2005 Detection of a nestmate quorum byencounter rates in the ant Leptothorax albipennis. Behav.Ecol. 16, 488–496. (doi:10.1093/beheco/ari020)
Pratt, S. C. In press. Behavioural mechanisms of collectivenest-site choice by the ant Temnothorax curvispinosis.Insect. Soc.
Pratt, S. C. & Pierce, N. E. 2001 The cavity-dwelling antLeptothorax curvispinosus uses nest geometry to dis-criminate between potential homes. Anim. Behav. 62,281–287. (doi:10.1006/anbe.2001.1777)
Pratt, S. C., Mallon, E. B., Sumpter, D. J. T. & Franks, N. R.2002 Quorum sensing, recruitment, and collectivedecision-making during colony emigration by the antLeptothorax albipennis. Behav. Ecol. Sociobiol. 52, 117–127.(doi:10.1007/s00265-002-0487-x)
Pratt, S. C., Sumpter, D. J. T., Mallon, E. B. & Franks, N. R.2005 An agent-based model of collective nest site choiceby the ant Leptothorax albipennis. Anim. Behav. 70,1023–1036.
Ratnieks, F. L. W. 1988 Reproductive harmony via mutualpolicing by workers in Eusocial hymenoptera. Am. Nat.132, 217–236. (doi:10.1086/284846)
Ratnieks, F. L. W. & Visscher, P. K. 1989 Worker policing inthe honeybee. Nature 342, 796–797. (doi:10.1038/342796a0)
Reebs, S. G. 2000 Can a minority of informed leadersdetermine the foraging movements of a fish shoal? Anim.Behav. 59, 403–409. (doi:10.1006/anbe.1999.1314)

22 D. J. T. Sumpter Principles of collective animal behaviour
on 31 August 2009rstb.royalsocietypublishing.orgDownloaded from
Reynolds, C. W. 1987 Flocks, herds and schools: adistributed behavioural model. Comp. Graph. 21, 25–33.
Robson, S. K. & Traniello, J. F. A. 1999 Key individuals andthe organisation of labor in ants. In Information processingin social insects (ed. C. Detrain, J. L. Deneubourg & J. M.Pasteels), pp. 239–259. Basel: Birkhauser.
Schelling, T. 1978 Micromotives and macrobehaviour. NewYork: Norton.
Seeley, T. D. 1995 The wisdom of the hive. Cambridge, MA:Belknap Press of Harvard University Press.
Seeley, T. D. 1998 Thoughts on information and integrationin honey bee colonies. Apidologie 29, 67–80.
Seeley, T. D. 2002 When is self-organization used inbiological systems? Biol. Bull. 202, 314–318.
Seeley, T. D. 2003 Consensus building during nest-siteselection in honey bee swarms: the expiration of dissent.Behav. Ecol. Sociobiol. 53, 417–424.
Seeley, T. D. & Buhrman, S. C. 2001 Nest-site selection inhoney bees: how well do swarms implement the “best-of-N” decision rule? Behav. Ecol. Sociobiol. 49, 416–427.(doi:10.1007/s002650000299)
Seeley, T. D. & Visscher, P. K. 2003 Choosing a home: howthe scouts in a honey bee swarm perceive the completionof their group decision making. Behav. Ecol. Sociobiol. 54,511–520. (doi:10.1007/s00265-003-0664-6)
Seeley, T. D. & Visscher, P. K. 2004 Quorum sensingduring nest-site selection by honeybee swarms. Behav.Ecol. Sociobiol. 56, 594–601. (doi:10.1007/s00265-004-0814-5)
Seeley, T. D., Camazine, S. & Sneyd, J. 1991 Collectivedecision-making in honey bees: how colonies chooseamong nectar sources. Behav. Ecol. Sociobiol. 28,277–290. (doi:10.1007/BF00175101)
Seeley, T. D., Weidenmuller, A. & Kuhnholz, S. 1998 Theshaking signal of the honey bee informs workers to preparefor greater activity. Ethology 104, 10–26.
Simpson, S. J., McCaffery, A. R. & Hagele, B. F. 1999A behavioural analysis of phase change in the desertlocust. Biol. Rev. 74, 461–480. (doi:10.1017/S000632319900540X)
Phil. Trans. R. Soc. B (2006)
Simpson, S. J., Despland, E., Hagele, B. F. & Dodgson, T.2001 Gregarious behavior in desert locusts is evoked bytouching their back legs. Proc. Natl Acad. Sci. USA 98,3895–3897. (doi:10.1073/pnas.071527998)
Sornette, D. 2004 Critical phenomena in natural sciences.Berlin: Springer.
Stern, K. & McClintock, M. K. 1998 Regulation of oculationby human pheromones. Nature 392, 177–179. (doi:10.1038/32408)
Strogatz, S. 2003 Sync: the emerging science of spontaneousorder. London: Penguin books.
Sumpter, D. J. T. & Beekman, M. 2003 From nonlinearity tooptimality: pheromone trail foraging by ants. Anim. Behav.66, 273–280. (doi:10.1006/anbe.2003.2224)
Surowiecki, J. 2004 The wisdom of crowds. New York: LittleBrown.
Theraulaz, G. et al. 2002 Spatial patterns in ant colonies.Proc. Natl Acad. Sci. USA 99, 9645–9649. (doi:10.1073/pnas.152302199)
Theraulaz, G., Gautrais, J., Camazine, S. & Deneubourg,J. L. 2003 The formation of spatial patterns in socialinsects: from simple behaviours to complex structures.Philos. Trans. R. Soc. A 361, 1263–1282. (doi:10.1098/rsta.2003.1198)
Trivers, R. L. & Hare, H. 1976 Haplodiploidy and theevolution of the social insects. Science 191, 249–263.
von Bertalanffy, L. 1968 General system theory. New York:George Braziller.
von Dassow, G., Meir, E., Munro, E. & Odell, G. 2000 Thesegment polarity network is a robust development module.Nature 406, 188–192. (doi:10.1038/35018085)
Weidenmuller, A. 2004 The control of nest climate inbumblebee (Bombus terrestris) colonies: interindividualvariability and self reinforcement in fanning response.Behav. Ecol. 15, 120–128. (doi:10.1093/beheco/arg101)
Wiener, N. 1948 Cybernetics. New York: Wiley.Wilson, E. O. 1971 The insect societies. Cambridge, MA:
Belknap Press of Harvard University Press.Wolfram, S. 2002 A new kind of science. Champaign, IL:
Wolfram Media.