Embed Size (px)
Citation preview

The Proportional Integral Notch and Coleman Blade Effective WindSpeed Estimators and Their Similarities
Yichao Liu1, Atindriyo K. Pamososuryo1, Sebastiaan P. Mulders1,Riccardo M.G. Ferrari1 and Jan-Willem van Wingerden1
Abstract— The estimation of the rotor effective wind speedis used in modern wind turbines to provide advanced powerand load control capabilities. However, with the ever increasingrotor sizes, the wind field over the rotor surface shows ahigher degree of spatial variation. A single effective windspeed estimation therefore limits the attainable levels of loadmitigation, and the estimation of the Blade Effective WindSpeed (BEWS) might present opportunities for improved loadcontrol. This letter introduces two novel BEWS estimatorapproaches: A Proportional Integral Notch (PIN) estimatorbased on individual blade load measurements, and a Colemanestimator targeting the estimation in the non-rotating frame.Given the seeming disparities between these two estimators,the objective of this letter is to analyze the similarities betweenthe approaches. It is shown that the PIN estimator, whichis equivalent to the diagonal form of the Coleman estimator,is a simple but effective method to estimate the BEWS. TheColeman estimator, which takes the coupling effects betweenindividual blades into account, shows a more well behavedtransient response than the PIN estimator.
I. INTRODUCTION
Over the past decade, wind energy has grown exponentiallyin the global energy mix, benefiting from scientific advance-ment, reduced costs and governments’ subsidy schemes.The Global Wind Energy Council [1] reported that morethan 90 GW of new wind power was deployed in 2020,which exhibits a global growth of 53 % compared to 2019.This growth is partially driven by the fact that the physicaldimensions of wind turbines dramatically increased, whichresulted in a rising demand for optimization of wind turbinecontrol systems.
For larger turbines, the wind inflow conditions over therotor area demonstrate a high degree of spatial variability.As a result, the need for more accurate and granular windspeed information is becoming ever more prominent forthe design of effective control algorithms. The wind speedmeasurement from the conventional anemometer is generallyomitted in the control system, as it is a single point-wisemeasurement disturbed by rotor induction [2]. Therefore, awind sensing technique that leverages the wind turbine rotoras a generalized anemometer, to provide an estimate of theeffective wind inflow conditions, is considered as a viablesolution to address this challenge.
This research was conducted in cooperation with Vestas Wind SystemsA/S. It was also partially supported by the European Union via aMarie Sklodowska-Curie Action (Project EDOWE, grant 835901). 1DelftUniversity of Technology, Delft Center for Systems and Control,Mekelweg 2, 2628 CD Delft, The Netherlands. {Y.Liu-17,A.K.Pamososuryo, S.P.Mulders, R.Ferrari,J.W.vanWingerden}@tudelft.nl.
Wind sensing techniques are based on the idea that windstate changes are reflected by prior turbine knowledge, real-time measurements and control signals. For instance, thewidely-used Immersion and Invariance (I&I) estimator [3]exploits prior knowledge on the (aerodynamic) turbine prop-erties, combined with an angular speed measurement and theapplied generator torque control signal to estimate the RotorEffective Wind Speed (REWS). Liu et al. [4] revisited theI&I estimator, added an integral term, and proved that thetechnique shows a high degree of similarity to the populartorque balance estimation method [2], [5], [6].
The previously mentioned methods still return a singlepoint-wise estimate of the effective wind speed across therotor disc. The increasingly common usage of load sen-sors on wind turbines however, forms an opportunity formore advanced wind speed estimation solutions. Bottassoet al. [7] developed a load-sensing approach to estimatethe REWS, where several wind characteristics are estimated(e.g., wind shear and yaw misalignment). Liu et al. [8]proposed a Subspace Predictive Repetitive Estimator (SPRE)to identify the periodic wind flow on an individual blade,while also providing approximations on wind shear and wakeimpingement based on blade load measurements. Althoughthe algorithm has proven to be very effective, the SPREapproach introduces significant delays in the blade effectivewind speed (BEWS) estimation, thus making it less suitablefor closed-loop control.
In this letter, two novel load-sensing approaches to es-timate the periodic wind flow on an individual blade areproposed. The first method is called Proportional IntegralNotch (PIN) estimator, in which an azimuth-dependent conecoefficient is defined to reflect the one-to-one relation be-tween the wind speeds and the blade loads. It is also assumedthat the periodic wind speed on an individual blade is asuperposition of REWS and zero-mean BEWS acting on therotating frequencies. The proportional-integral component ofthe estimator is used to estimate the REWS component at 0P,while the gain-scheduled notch is added to identify the zero-mean BEWS component at higher frequencies. The secondapproach employs the Coleman transformation to translateblade load signals from the rotating frame into the fixedframe. This transformation is often used in individual pitchcontrol (IPC) implementations for blade fatigue load reduc-tions [9], [10]. The Coleman estimation technique showsresemblance with the PIN estimator, making it compellingto understand the similarities of both schemes in terms oftheir structure and performance. To this end, as a core
arX
iv:2
110.
0063
9v1
[ee
ss.S
Y]
1 O
ct 2
021
contribution of this letter, a frequency-domain analysis hasbeen performed to understand the similarities under varyingwind conditions.
This study provides the following contributions:1) Proposing a novel PIN estimator to estimate the BEWS
for wind turbines.2) Accounting for the coupled blade dynamics by devel-
oping a new Coleman estimator.3) Showcasing the similarities between the PIN and the
Coleman estimators via theoretical analyses and nu-merical simulations.
The remainder of this letter is organized as follows: Sec-tion II introduces the wind turbine model considered in thisresearch and the azimuth-dependent cone coefficient used bythe proposed wind speed estimators. Section III theoreticallyformalizes the estimation techniques and demonstrates thesimilarities of both schemes. In Section IV, high-fidelitywind turbine simulations are carried out to demonstrate theestimators’ performance and to verify the theoretical results.Finally, conclusions are drawn in Section V.
II. WIND TURBINE MODEL AND ITS CONE COEFFICIENT
This section introduces the wind turbine model and theazimuth-dependent cone coefficient [7] which are used toestablish the wind speed estimation schemes. For a horizontalaxis wind turbine, the azimuth-dependent cone coefficient isdefined as:
Cm,i(λi, qi, ψi) :=mi(λi, qi, ψi)
12ρARU
2i
, (1)
where ρ is the air density, A the rotor swept area, and Uirepresents the BEWS. The measured out-of-plane blade rootbending moment (MOoP) is denoted by mi, which is –amongst other variables – a function of the azimuth angleψi = ψ+2π(i−1)/3, where i = {1, 2, 3} is the blade indexfor a three-bladed wind turbine and ψ the azimuth angle ofthe first blade. The cone coefficient is represented by Cm,i
and depends on the azimuth position of blade i. Here, Cm,i
is a nonlinear function of the tip-speed ratio
λi :=ωrR
Ui, (2)
where ωr and R are the rotor speed and the rotor radius,respectively. In Eq. (1), qi represents the blade effectivedynamic pressure
qi :=1
2ρU2
i . (3)
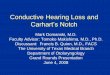
The shape of the Cm,i surface is determined by the structuraldesign of the wind turbine, and is typically derived viaeither high-fidelity numerical simulations or experimentaltests. Note that Cm,i is also a function of the blade pitchangle [8]. However, without loss of generality, the pitch angleis assumed to be constant throughout this study.
The wind turbine model considered in this letter is theNational Renewable Energy Laboratory (NREL) 5-MW ref-erence wind turbine [11]. Its Cm,1 curve is shown in Fig. 1for illustration purposes, which is obtained from steady-state
50 100 150 200 250 300 350
2
3
4
5
6
7
8
9
10
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
Fig. 1. Cone coefficient surface Cm,1 for blade 1 of the NREL 5-MWwind turbine model for a uniform constant wind speed of 8m/s.
wind turbine simulations, in which the turbine is subjectedto a sheared wind profile with a constant velocity of 8 m/s.
Once the cone coefficient is derived for each blade andover the operating conditions of interests, Eq. (1) can beused to estimate the MOoP as:
mi(λi, qi, ψi) =1
2ρARU2
i Cm,i(λi, qi, ψi) . (4)
Based on the wind turbine model and its azimuth-dependent cone coefficient, the BEWS estimator problem isformalized in Section III.
III. BLADE EFFECTIVE WIND SPEED ESTIMATOR
First, the following assumptions are formulated for the windspeed estimation problem.
Assumption 1. Cm,i is a known and smooth nonlinearfunction of class Cn, i.e., its 0th through nth derivativesare continuous, with n ∈ Z+.
Assumption 2. The blade effective wind speed for an indi-vidual blade Ui and for the rotor disk U are regarded aspositive and unknown signals.
Assumption 3. The signals mi and ωr are assumed to bemeasured. The wind turbine operates at a constant rotorspeed, i.e., ωr(t) = 0.
The wind speed estimation problem solved in this letter isthus formulated as:
Problem 1. Given the nonlinear relation (4) for estimationof the MOoP, find asymptotically convergent estimates Uiand ˆU for the wind speed such that:
limt→∞
Ui(t) = Ui, limt→∞
ˆU(t) = U . (5)
The following subsections outline two wind speed estimationtechniques. The last subsection concludes by performing asimilarity analysis.

A. Proportional integral notch estimator
In our previous work [4], we revisited the widely-usedI&I estimator and extended the proportional-only structureby including an integral correction term. Inspired by theextended I&I estimator which returns an estimate of theREWS, this letter proposes a novel wind speed estimatorcalled the Proportional Integral Notch (PIN) estimator toestimate the BEWS. The frequency content of the wind speedexperienced by each blade is composed of specific harmonicsthat are related to (integer multiples of) the rotor rotationalfrequency. This is due to, e.g., the wind shear and towershadow. The BEWS can thus be estimated by amplifyingthose specific frequencies via a feedback control structure.Therefore, the periodic wind speed over an individual bladei can be estimated as{
εi = mi
(ωr, Ui, qi, ψi
)−mi,
Ui(s) = K(s)εi(s) = (kpKN(s) + ki/s) εi,(6)
where {kp, ki} ∈ R+ are the proportional and integralgains. The error between the estimated and measured MOoPis indicated by εi. The notch transfer function KN(s) isscheduled by the rotor speed ωr and is defined as:
KN(s) =2wrs
s2 + w2r
. (7)
As a result, the PIN estimator transfer matrix CPIN(s, ωr) isformulated as:U1(s)
U2(s)
U3(s)
:=
K(s) 0 00 K(s) 00 0 K(s)
︸ ︷︷ ︸
CPIN(s,ωr)
ε1(s)ε2(s)ε3(s)
. (8)
From Eq. (8), it is evident that a diagonal and decoupledBEWS estimator K(s) solely responds to its local blade loadmeasurements which is depicted in Fig. 2(a). However, it iswell known that there exists a significant amount of dynamiccoupling between the blades of a turbine rotor [10], that is,the coupling is present between the wind speed Ui(s) and theblade load mj(s) for i 6= j. The PIN estimator CPIN(s, ωr)is diagonal and thus the off-diagonal terms are nonexistent,which implies that the proposed estimator is unable to takethe coupling effects between blades into account.
The lack of information on the coupled blade dynamicswill degrade the performance of the wind speed estimator,as will become apparent during the numerical simulationsin Section IV. To cope with the problem of unmodeleddynamics, we propose a second estimation technique whichemploys the Coleman transformation in a similar estimationframework. This will be outlined in the next subsection.Afterwards, the resemblances between and differences ofboth estimators are discussed.
B. Coleman estimator
The Coleman transformation [12] is an important techniqueto convert the wind turbine dynamics to the non-rotatingframe. By replacing the diagonal part of the PIN estimator
Inverse Coleman Transformation
−
−
−
+
+
+
Forward Coleman Transformation
Transfer function matrix
Azimuth-dependent cone coefficient
Gain schedulerColeman estimator
Azimuth-dependent cone coefficient
−
−
−
+
+
+Gain scheduler
PIN estimator
(a)
(b)
Fig. 2. Block diagram of the BEWS estimators formed by a negativefeedback interconnection of a linear estimator gain and a nonlinear azimuth-dependent cone coefficient. (a) PIN estimator, (b) Coleman estimator.
with the forward and inverse Coleman transformations andby including a diagonal integral transfer matrix, the so-calledColeman estimator is formulated as shown in Fig. 2(b).
The forward Coleman transformation used in the estimatoris defined as follows: εcol
εtiltεyaw
:=2
3
1/2 1/2 1/2sin (ψ1) sin (ψ2) sin (ψ3)cos (ψ1) cos (ψ2) cos (ψ3)
︸ ︷︷ ︸
Tcm(ψ(t))
ε1ε2ε3
, (9)
where εtilt and εyaw are the error signals of the estimatedand projected MOoP in tilt and yaw directions, respectively,while εcol indicates that of the collective MOoP estimation.
With the transfer function matrix Ccm these quantitiesare mapped to the estimated collective, tilt and yaw windspeed components. The matrix Ccm is composed out of pureintegrals in a diagonal structure to obtain the estimate of thewind speeds in the non-rotating frame, and is defined as: Ucol
Utilt
Uyaw
:=
Kcol/s 0 00 K0/s 00 0 K0/s
︸ ︷︷ ︸
Ccm(s)
εcolεtiltεyaw
, (10)
where Kcol is the integral gain for estimating the collectivecomponent of the wind speed whereas the gain K0 is usedfor both the tilt and yaw referred wind speeds for simplicity.Finally, the signals are projected back into the rotating frame

to obtain BEWS with the inverse Coleman transformationU1
U2
U3
:=
1 sin (ψ1) cos (ψ1)1 sin (ψ2) cos (ψ2)1 sin (ψ3) cos (ψ3)
︸ ︷︷ ︸
T invcm (ψ(t))
Ucol
Utilt
Uyaw
. (11)
C. Similarities between PIN and Coleman estimators
Given these two seeming dissimilar BEWS estimators, it iscompelling to attempt to understand their similarities. Toachieve this goal, the transfer function matrix form of theColeman estimator gain is first derived in Proposition 1.
Proposition 1. Let us consider the wind turbine operatingat a constant rotor speed, that is, ωr(t) = ω0. The Colemanestimator gain Ccol consisting of (9), (10) and (11) isequivalent to the following transfer function matrix:
Ccol(s, ω0) :=
KR,a(s) KR,b(s) KR,c(s)KR,c(s) KR,a(s) KR,b(s)KR,b(s) KR,c(s) KR,a(s)
, (12)
where the subscript ’R’ the rotating reference frame, and thetransfer functions KR,a, KR,b and KR,c are defined as:
KR,a(s) :=(2K0 +Kcol)s
2 +Kcolω20
3s(s2 + ω20)
,
KR,b(s) :=(Kcol −K0)s2 + (K0
√3ω0)s+Kcolω
20
3s(s2 + ω20)
,
KR,c(s) :=(Kcol −K0)s2 − (K0
√3ω0)s+Kcolω
20
3s(s2 + ω20)
.
Proof. The transfer function between the estimated windspeed in the non-rotating frame Ucol,tilt,yaw(s) and U1,2,3(s)in the rotating reference frame is given byU1(s)
U2(s)
U3(s)
= CT−
Ucol(s− jωr)
Utilt(s− jωr)
Uyaw(s− jωr)
+ CT+
Ucol(s+ jωr)
Utilt(s+ jωr)
Uyaw(s+ jωr)
+ CTcol
Ucol(s)
Utilt(s)
Uyaw(s)
, (13)
where
C− =1
2
0 0 00 1 j0 −j 1
0 0 0cos (0) cos ( 2π
3 ) cos ( 4π3 )
sin (0) sin ( 2π3 ) sin ( 4π
3 )
,
C+ =1
2
0 0 00 1 −j0 j 1
0 0 0cos (0) cos ( 2π
3 ) cos ( 4π3 )
sin (0) sin ( 2π3 ) sin ( 4π
3 )
,and
Ccol =
1 1 10 0 00 0 0
,
with j =√−1 being the imaginary unit. Given the diagonal
integral form of Eq. (10), it is straightforward to derive thefrequency-shifted transfer function as: Ucol(s− jωr)
Utilt(s− jωr)
Uyaw(s− jωr)
= Ccm(s− jωr)
εcol(s− jωr)εtilt(s− jωr)εyaw(s− jωr)
, (14)
and Ucol(s+ jωr)
Utilt(s+ jωr)
Uyaw(s+ jωr)
= Ccm(s+ jωr)
εcol(s+ jωr)εtilt(s+ jωr)εyaw(s+ jωr)
. (15)
Combining Eqs. (14) and (15), Eq. (13) is rewritten as:U1(s)
U2(s)
U3(s)
= CT−Ccm(s− jωr)
εcol(s− jωr)εtilt(s− jωr)εyaw(s− jωr)
+CT+Ccm(s+jωr)
εcol(s+ jωr)εtilt(s+ jωr)εyaw(s+ jωr)
+CTcolCcm(s)
εcol(s)εtilt(s)εyaw(s)
.(16)
In addition, the Coleman transformed expressions of ε1,2,3are formulated in the frequency domain as: εcol(s)
εtilt(s)εyaw(s)
=2
3C−
ε1(s− jωr)ε2(s− jωr)ε3(s− jωr)
+
2
3C+
ε1(s+ jωr)ε2(s+ jωr)ε3(s+ jωr)
+1
3Ccol
ε1(s)ε2(s)ε3(s)
, (17)
Substituting Eq. (17) into Eq. (16) yieldsU1(s)
U2(s)
U3(s)
= CT−Ccm(s− jωr)
2
3C−
ε1(s− 2jωr)ε2(s− 2jωr)ε3(s− 2jωr)
+
2
3C+
ε1(s)ε2(s)ε3(s)
+1
3Ccol
ε1(s− jωr)ε2(s− jωr)ε3(s− jωr)
+ CT+Ccm(s+ jωr)
2
3C−
ε1(s)ε2(s)ε3(s)
+2
3C+
ε1(s+ 2jωr)ε2(s+ 2jωr)ε3(s+ 2jωr)
+
1
3Ccol
ε1(s+ jωr)ε2(s+ jωr)ε3(s+ jωr)
+CTcolCcm(s)
2
3C−
U1(s− jωr)
U2(s− jωr)
U3(s− jωr)
+
2
3C+
ε1(s+ jωr)ε2(s+ jωr)ε3(s+ jωr)
+1
3Ccol
ε1(s)ε2(s)ε3(s)
, (18)
which can be simplified by the remarkable property:
CT−C− = CT+C+ = CT−Ccol = CT+Ccol = CTcolC− = CTcolC+ = 0,

100
102
100
100
102
100
100
102
100
100
102
100
100
102
100
100
102
100
100
102
100
100
102
100
100
102
100
Fig. 3. Bode magnitude plots of the Coleman estimator defined by thetransfer function matrix in Eq. (12), where 1P frequency is assumed asconstant, which is indicated by a red vertical line.
and results in the following equation:
U1(s)
U2(s)
U3(s)
=
(2
3CT−Ccm(s− jωr)C+
+2
3CT+Ccm(s+ jωr)C− +
1
3CTcolCcm(s)Ccol
)ε1(s)ε2(s)ε3(s)
,(19)
which results in the transfer function matrix form of theproposed Coleman estimator and completes the proof.
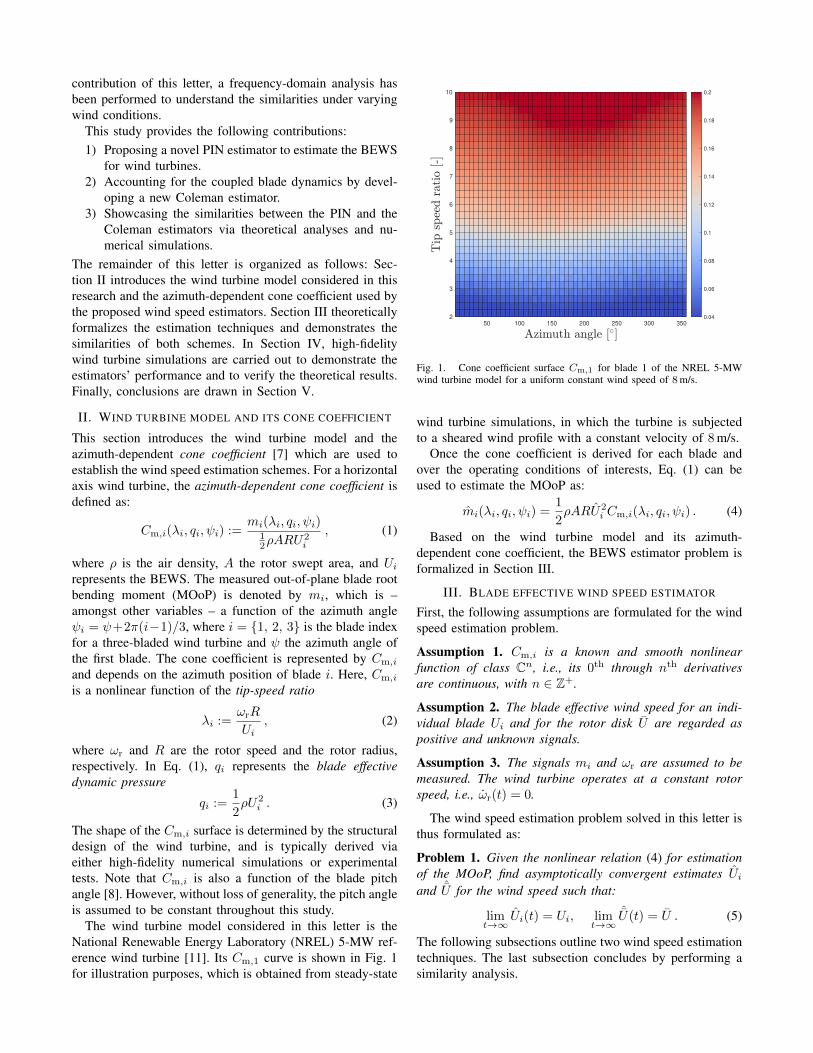
Bode magnitude plots of the transfer function matrixCcol(s, ω0) are illustrated in Fig. 3, where ωr = 2πfr withfr = 0.2 [Hz] refers to a constant 1P frequency of theconsidered wind turbine model.
The similarities between the PIN estimator (Eq. (8)) andthe Coleman estimator (Eq. (12)) are now further illustratedin the frequency domain.
Theorem 1. Consider the wind turbine operating at aconstant rotor speed ω0. Given the nonlinear and azimuth-dependent cone coefficient of Eq. (1), CPIN(s, ωr) defined inEq. (8) is equivalent to a diagonal structure of Ccol(s) inEq. (12) only including KR,a(s), where
ki =Kcol
3, kp =
K0
3ω0. (20)
Proof. To prove Theorem 1, the equality K(s) = KR,a(s)needs to hold under the conditions of Eq. (20). It is known
0 50 100 150 200 250 300 350 400
4
6
8
10
12
0 50 100 150 200 250 300 350 400
6
7
8
9
10
11
0 50 100 150 200 250 300 350 400
-1000
-500
0
500
1000
Fig. 4. Time history of the wind speed and the estimation error on blade 1between the PIN and Coleman estimators. Blades 2-3 show similar resultsand hence omitted.
from Eqs. (6) and (7) that
K(s) = kp2ωrs
s2 + ω2r
+kis
(21)
=kps
s
2ωrs
s2 + ω2r
+kis
s2 + ω2r
s2 + ω2r
(22)
=(2kpωr + ki)s
2 + kiω2r
s(s2 + ω2r )
. (23)
Given condition (20), it is evident that (23) is equal to KR,a
in (12) which proves that the PIN estimator is equivalent toa particular diagonal structure of the Coleman estimator.
IV. CASE STUDY
This section performs a case study to verify the theoreticalanalysis and to demonstrate the similarities between PIN andColeman estimators.
NREL’s high-fidelity wind turbine simulation softwarepackage Fatigue, Aerodynamics, Structures, and Turbulence(FAST) [13] is utilized to simulate the wind turbine dy-namics. The closed-loop control system including both windspeed estimator types is implemented in Simulink. Thebaseline K-omega-squared torque control law [13], with apredefined optimal mode gain, is used in this letter. Toevaluate the performance of the estimators, a sheared windprofile with a step-wise increasing wind speed from 8 m/s to10 m/s is considered. The gains of the wind speed estimatorsare determined according to Theorem 1, and the simulationtime step is set to 0.01 s.
The BEWS estimation results of the PIN and Colemanestimators are presented in Fig. 4. The proposed estimatorsshow similar results for the considered step-wise sheared

10-2
10-1
100
10-15
10-10
10-5
100
105
10-2
10-1
100
10-15
10-10
10-5
100
105
Fig. 5. Simulation results on the NREL 5MW wind turbine, where thepower spectrum of the wind speed on blade 1 illustrates the performancesimilarities between the PIN and Coleman estimators. Blades 2-3 showsimilar results and hence omitted.
wind conditions, which substantiates Theorem 1. The powerspectra of the estimated wind speed calculated for 200 s –400 s are presented in Fig. 5. The spectrum of the actualwind speed the blade experiences is also calculated andincluded as a reference and benchmark to evaluate estimatorperformance.
The Coleman and PIN estimators show almost consistentperformance for the dominant 1P harmonic. For the otherfrequencies, the power spectrum of the Coleman estimatoris closer to the reference value. This indicates that, comparedto the PIN estimator, the Coleman estimator has a superiorestimation quality for non-1P frequencies. In addition, it isevident that the Coleman estimator shows less oscillationsduring transients than the PIN estimator, which leads to asmoother and faster tracking of the actual wind speed. Sucha smoother transient response is explained by Eq. (12), as theMIMO transmission zeros are cancelled in this full transferfunction matrix form.
In summary, both wind speed estimators show similar per-formance for the considered wind conditions, which verifiesTheorem 1. The PIN estimator, which is deemed as a par-ticular diagonal form of the Coleman estimator, is a simplebut effective method to estimate the BEWS. The Colemanestimator, on the other hand, is superior in considering thecoupled rotor dynamics for the BEWS estimation. Since theeffects of the transmission zeros are eliminated by its off-diagonal terms, the Coleman estimator exhibits a smoothertransient response than the PIN estimator.
V. CONCLUSIONS
Two novel Blade Effective Wind Speed (BEWS) estimationschemes are proposed and an analysis is performed on thesimilarities of both implementations. First, a Proportional-Integral-Notch (PIN) estimator is introduced, which isformed by a negative feedback interconnection of a linear
diagonally decoupled estimator and a nonlinear azimuth-dependent cone coefficient. Following the same philosophy,a Coleman estimator, which is based on the Coleman trans-formation, is developed to incorporate the coupled rotordynamics into the estimation scheme.
Given the seeming disparities between these two esti-mators, it is proven that there exists structural and perfor-mance similarities between the PIN and Coleman estimators.Analytical and numerical results show the diagonal PINand coupled Coleman estimators exhibit similar estimationresults. In particular, the PIN estimator, which is consideredas a diagonal form of the Coleman estimator, is a simplebut effective method to estimate the BEWS. The Colemanestimator, on the other hand, is superior in taking into ac-count the coupled rotor dynamics for the BEWS estimation.Since the effects of the MIMO transmission zeros presentin the PIN scheme are eliminated by the off-diagonal termsof the Coleman estimator, the latter mentioned shows bettertransient behavior compared to the PIN estimator.
Future work will include the investigation of global con-vergence properties of the wind speed estimator, coupledwith wind turbine controllers such as a tip-speed ratiotracker.
REFERENCES
[1] Global Wind Energy Council, “Global wind report 2021,” Global windenergy council, Report, 2021.
[2] M. N. Soltani, T. Knudsen, M. Svenstrup, R. Wisniewski, P. Brath,R. Ortega, and K. Johnson, “Estimation of rotor effective wind speed:A comparison,” IEEE Transactions on Control Systems Technology,vol. 21, no. 4, pp. 1155–1167, July 2013.
[3] R. Ortega, F. Mancilla-David, and F. Jaramillo, “A globally convergentwind speed estimator for wind turbine systems,” International Journalof Adaptive Control and Signal Processing, vol. 27, no. 5, pp. 413–425, 2013.
[4] Y. Liu, A. K. Pamososuryo, R. M. G. Ferrari, and J. W. van Wingerden,“The immersion and invariance wind speed estimator revisited and newresults,” IEEE Control Systems Letters, vol. 6, pp. 361–366, 2022.
[5] E. A. Bossanyi, “The design of closed loop controllers for windturbines,” Wind Energy, vol. 3, no. 3, pp. 149–163, 2000.
[6] K. Z. Østergaard, P. Brath, and J. Stoustrup, “Estimation of effectivewind speed,” in Journal of Physics: Conference Series, vol. 75, no. 1.The Science of Making Torque from Wind Lyngby, Denmark, 2007,p. 012082.
[7] C. Bottasso, S. Cacciola, and J. Schreiber, “Local wind speed esti-mation, with application to wake impingement detection,” RenewableEnergy, vol. 116, pp. 155 – 168, 2018.
[8] Y. Liu, A. Kusumo Pamososuryo, R. Ferrari, T. Gybel Hovgaard, andJ. W. van Wingerden, “Blade Effective Wind Speed Estimation: ASubspace Predictive Repetitive Estimator Approach,” in 2021 Euro-pean Control Conference (ECC), 2021.
[9] E. A. Bossanyi, “Individual Blade Pitch Control for Load Reduction,”Wind Energy, vol. 6, no. 2, pp. 119–128, apr 2003. [Online].Available: http://doi.wiley.com/10.1002/we.76
[10] S. P. Mulders, A. K. Pamososuryo, G. E. Disario, and J. W. vanWingerden, “Analysis and optimal individual pitch control decouplingby inclusion of an azimuth offset in the multiblade coordinate trans-formation,” Wind Energy, vol. 22, no. 3, pp. 341–359, 2019.
[11] J. Jonkman, S. Butterfield, W. Musial, and G. Scott, “Definition ofa 5MW reference wind turbine for offshore system development,”National Renewable Energy Laboratory, NREL/TP-500-38060, 2009.
[12] G. Bir, “Multi-blade coordinate transformation and its application towind turbine analysis,” in 46th AIAA Aerospace Sciences Meeting andExhibit, 2008.
[13] J. M. Jonkman and M. L. Buhl, “Fast user’s guide,” SciTech Connect:FAST User’s Guide, 2005.