Embed Size (px)
Citation preview

The Real-TimeMiddleware Experts
Use-Cases and Examples on Scalable, Secure, and Safe UAS Software Architecture
Practical Approaches and Lessons Learned
Edwin de Jong

© 2009 Real-Time Innovations, Inc. 2
Agenda
Background– Multi-mission UAS in the net-centric environment
UAS communication requirements
Need for modular and adaptable systems architecture
Open integration framework solution– Standards based– Deployed inside and outside UAS

© 2009 Real-Time Innovations, Inc. 3
Net-Centric UAS
Next generation UAS is network of– Self-coordinating UAV’s– Multiple Ground Control Stations (GCS’s)– Manned aircraft, space systems, ground troops
Multiple and changing mission objectives
Net-centric vision challenge:– Make data and capabilities of UAVs and GCS’s
accessible to every relevant participant tothe net-centric environment

© 2009 Real-Time Innovations, Inc. 4
Towards Open Integration Framework
Efficient use of communication infrastructure essential to net-centric environment
Contribution to goals from US DoD Unmanned Systems Roadmap 2007-2032:– Greater interoperability among sub-systems by
emphasizing commonality– Development of policies, standards, and procedures for
safe and timely operations and effective integration

© 2009 Real-Time Innovations, Inc. 5
More Efficient Communication Infrastructure Utilization
Vehicle LAN
Data Link
Ground StationLAN
Avionics
Net Centric GIG
TacticalBackbone
Real-Time
Ground Station
BackendWAN

© 2009 Real-Time Innovations, Inc. 6
Baseline Capabilities for UAS Communication Platform
Open standards based– Commonality and interoperability
True peer-to-peer architecture– No single point of failure
Portable to any communication media– RF, optical links, high-speed interconnects,
enterprise networks
Available for heterogeneous environments– Embedded, low-power, small foot-print, RTOS, MILS, ARINC653– Mainstream OS’s (Windows, Linux) and CPU’s (Intel x86)– Adaptable to certification (DO-178B)
Integrate with payload data (STANAG 4586)

© 2009 Real-Time Innovations, Inc. 7
Communications “Matrix of Pain”
Multiple traffic types:– Sensor data streams– Command and control data– Status, intelligence, mission, supervisory data
Different traffic requirements for each type:– Response time, priority, reliability, volume– Stealth operations
Challenging communications channel:– Large latency, low throughput– Lossy– Varying availability– Asymmetric bandwidth (downlink vs uplink)
Security…

© 2009 Real-Time Innovations, Inc. 8
Need For Modular And Adaptable Systems Architecture
Shared Data Model
StreamingData
Sensors Events
Real-TimeApplications
EnterpriseApplications
Actuators
Build down from data model– not up from communications
infrastructure
Integration languagebetween UAS developersand multi-mission forceintegrator
Maximum decoupling between subsystems allowing reconfiguration, upgrades, replacements

© 2009 Real-Time Innovations, Inc. 9
A Data-Centric Approach
Message-centric Typical result of connection-oriented communications• Multi-hop• Hard-wired• Brittle• Hard to evolve
Data-centricPublish-Subscribe based systems interact via data • Peer-to-peer• Loosely coupled• Scalable• Evolvable
Data Bus
9
Source: [modified] Raytheon Keynote Presentation September 2006 at DDS Information Day, Anaheim , CA

10 © 2009 Real-Time Innovations, Inc.
Why Distribution Middleware?
8.0 Training
5.0 Communications
2.0 Sensors
3.0 Fusion
4.0 BMC2
7.0 Visualization
6.0 Sensor Control
1.0 Common Services
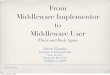
Grouping the modules into functional clusters does nothing to change that reality and ease software integration
UNCLASSIFIED
Hawkeye has functionally oriented software modules
Each module talks to many other modules RIP TRK MSI
WAC TDA
ESM SAFERDR IFF
SEN DSCL4 L16L11
HMI ACIS
DIA NAV IPCCMCP
MUX
FIL TDM
Adding new functionality cascades integration re-work across many other modules
CEC
8.0 Training
5.0 Communications
2.0 Sensors
3.0 Fusion
4.0 BMC2
7.0 Visualization
6.0 Sensor Control
1.0 Common Services
RIP TRKCEC MSIWAC RAIDERTDA
DWC
CHAT
ESM SAFERDR IFF
SEN DSCD
istribu
ted D
ata Fram
ewo
rkIPv6L4 L16L11
HMI ACIS T4O
DIA NAV IPCCMCP
MUX
FIL TDM aADNS TIS
1.0 Common Services
Changing the communication between the modules can ease integration, when the new ‘Publish Subscribe’ approach is used – each module publishes its output w/o regard to who is receiving it, in contrast to the point-to-point approach of traditional inter-process communication
It’s about an architecture that can assimilate evolving functionality, rather than remaining set in time

© 2009 Real-Time Innovations, Inc. 11
Communications Infrastructure Utilization
Associate Quality-of-Service with both provider and consumer interfaces– Defining how/when data gets
delivered
Decouple end-points from communications infrastructure
Dynamically bind one-to-one and one-to-many connections
Example: data reliability provided versus requested

© 2009 Real-Time Innovations, Inc. 12
Details: Quality of Service (QoS)
Besides what data needs to be delivered, users often need to specify how……reliable (or send and forget)…much data (all, last 5, every 2 secs)…long is data good for…many publishers of the same data is allowed…to failover if an existing publisher dies…to detect “dead” applications…to handle redundant network interfaces… …
In the DDS standard, these options are controlled by formally-defined Quality of Service (QoS)
© 2008 Real-Time Innovations, Inc.12

© 2009 Real-Time Innovations, Inc. 13
Open Integration Framework Solution
OMG Data Distribution ServiceStandard
StreamingData
Sensors Events
Real-TimeApplications
EnterpriseApplications
Actuators

© 2009 Real-Time Innovations, Inc. 14
Open Architecture
Vendor independent– API for portability– Wire protocol (RTPS) for interoperability
Multiple vendors– 7 of API– 4 support RTPS
Heterogeneous– C, C++, Java, .NET (C#, C++/CLI)– Windows, Linux, Unix, embedded, real
time, MILS
Loosely coupled
Real-Time Publish-Subscribe
Wire Protocol (RTPS)
Middleware
DDS API
Cross-vendor portability
Cross-vendor interoperability

© 2009 Real-Time Innovations, Inc. 15
Pluggable Transport Framework
Standard IP network(Ethernet, SM, etc.)
IP
UDP
IB
Allows for simultaneous use of multiple transports
Allows for Secure/Safe Transports (e.g. 653, DTLS)
Enables non-IP centric transports (e.g. dma fabrics)
Provides high-performance (zero-copy interface)
TCPIPv4IPv6 DTLS IPsec
RTI Data Distribution Service
Real-timeapplications

© 2009 Real-Time Innovations, Inc. 16
Safety-Critical Design Challenges
Interoperability of safety-critical and non-safety-critical distributed systems
Complex data flows and increased connectivity
Small-footprint nodes and consolidation
Deterministic requirements
Software development patterns
Certifiable composition

© 2009 Real-Time Innovations, Inc. 17
Program Adoption
DISA: DISR mandated
Navy: Open Architecture, FORCEnet
Air Force, Navy and DISA: NESI
Army: FCS / SoSCOE
Air traffic control for southern Europe
…plus over 300 individual projects

© 2009 Real-Time Innovations, Inc. 18
DDS Application Examples
Aegis Weapon System
Lockheed Martin
Radar, weapons, displays, C2
B-1B Bomber
Boeing
C2, communications, weapons
Common Link Integration Processing (CLIP)
Northrop Grumman
Standards-compliant interface to legacy and new tactical data links
Air Force, Navy, B-1B and B-52
ScanEagle UAV
Boeing
Sensors, ground station
Advanced Cockpit Ground Control Station
Predator and SkyWarrior UAS
General Atomics
Telemetry data, multiple workstations
RoboScout
Base10
Internal data bus and link to communications center

© 2009 Real-Time Innovations, Inc. 19© 2009 Real-Time Innovations, Inc. COMPANY CONFIDENTIAL
Insitu (Boeing) Unmanned Air Vehicle
“…we have seen a 30% increase in productivity based on not having to handle data communication issues.” Gary Viviani, VP of Engineering
Insitu is a recognized leader in the exploding UAV space
The next generation of UAV’s including the Scan Eagle and newer platforms
RTI allows seamless switch control between multiple ground stations while connecting reliably over unreliable links.
Middleware enables orchestrated, flexible information flow

© 2009 Real-Time Innovations, Inc. 20© 2009 Real-Time Innovations, Inc. COMPANY CONFIDENTIAL
Predator Ground Control Station
Defense
General Atomics Aeronautical Systems developed advanced cockpit ground control stations (GCSs) for unmanned aircraft systems such as Predator®
Required real-time data distribution for acquisition, analysis, and response of remote controlled aircraft
RTI selected for proven software & services.
This application was delivered in under 14 months, significantly faster than with alternative software or building their own.
Middleware speeds development

© 2009 Real-Time Innovations, Inc. 21
CLIP Mediator Bridge
Common Link Integration Processing (CLIP): a key U.S. Air Force and Navy joint project to build Tactical Data Link (TDL) aggregator
RTI Services helped architect, design, develop, and test software that ‘mediated’ between platform systems and CLIP
RTI middleware bridges legacy networks“Working with RTI has been both
effective and productive.”
– Jim Miller, CLIP Program Manager
Tactical Data Links
Global Data Space
LINK16 LINK11LINK22
TCP/UDP/IP
Displays& other systems

© 2009 Real-Time Innovations, Inc. 22
Automotive Safety
The VW Driver Assistance & Integrated Safety system provides steering assistance when swerving to avoid obstacles, detects when the lane narrows or passing wide loads, and helps drivers to safely negotiate bends.
RTI middleware bridges high speed networking to the CAN bus

© 2009 Real-Time Innovations, Inc. 23
Thank You!
Q & A