Embed Size (px)
Citation preview
THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
Extended Environmental Monitoring via Intelligent Autonomous Airship
(NSF Grant ECS-0086931)
Research Team:• Faculty
• Sanjiv Singh, PI (CMU)• David Wettergreen (CMU)• Cliff Davidson (CMU)• Jim Ostrowski (UPenn)
• Postdocs• George Kantor
• Graduate Students (CMU)• Jong Woo Kim (UPenn)
• Undergraduate Students• Michael Schultz (CMU)• Vito Sabella (UPenn)• Daniel Levin (UPenn)
THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
Purpose:To use an airship as a robotic “field scientist” to collect, analyze, organize, and disseminate environmental data.
Requirements:Automatic flight control.
Integration of navigational and environmental sensors.
Renewable power source for extended duration operation.
Science-driven autonomy
Extended Environmental Monitoring via Intelligent Autonomous Airship
(NSF Grant ECS-0086931)
THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
Motivating Examples
• Air Pollution• 3-D pollution profiles• Plume tracking
• Forest Management• Gypsy moth defoliation • Forest typing
• Wetlands• Delineation• Flora/fauna monitoring
• Other• Geological assessment/prospecting• Characterization of archeological sites
THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
Theoretical Advances
6 DOF dynamic airship model
Feasibility study for solar powered airship
Path following for airship and other underactuated dynamical systems
Randomized path planning to generate near-optimal motion plans
THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
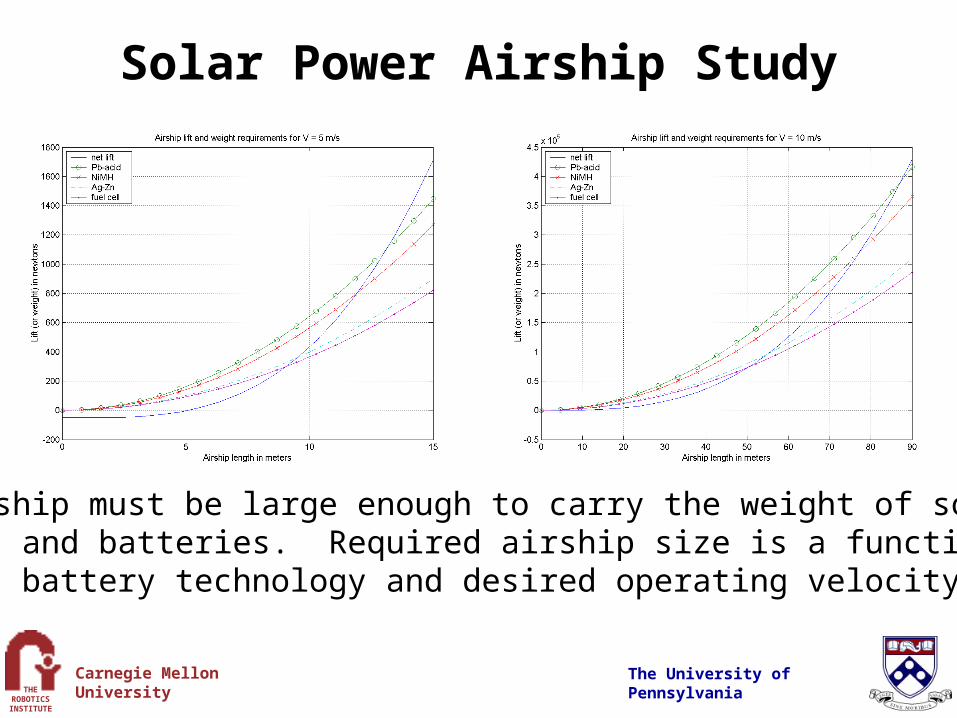
Solar Power Airship Study
Airship must be large enough to carry the weight of solar cells and batteries. Required airship size is a function of
battery technology and desired operating velocity
THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
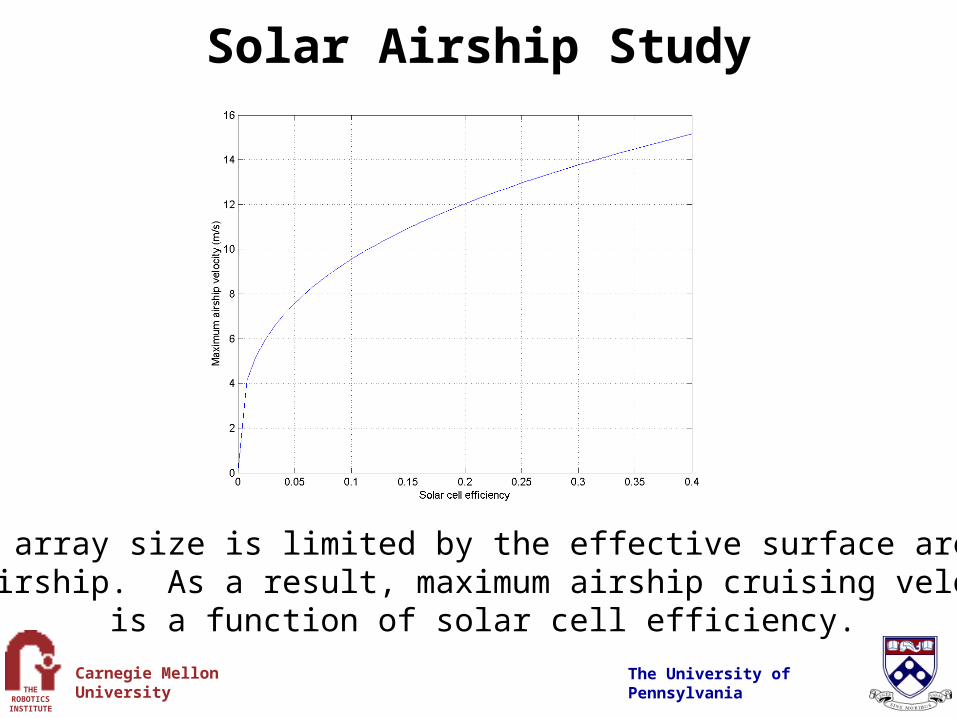
Solar Airship Study
Solar array size is limited by the effective surface area of the airship. As a result, maximum airship cruising velocity
is a function of solar cell efficiency.
THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
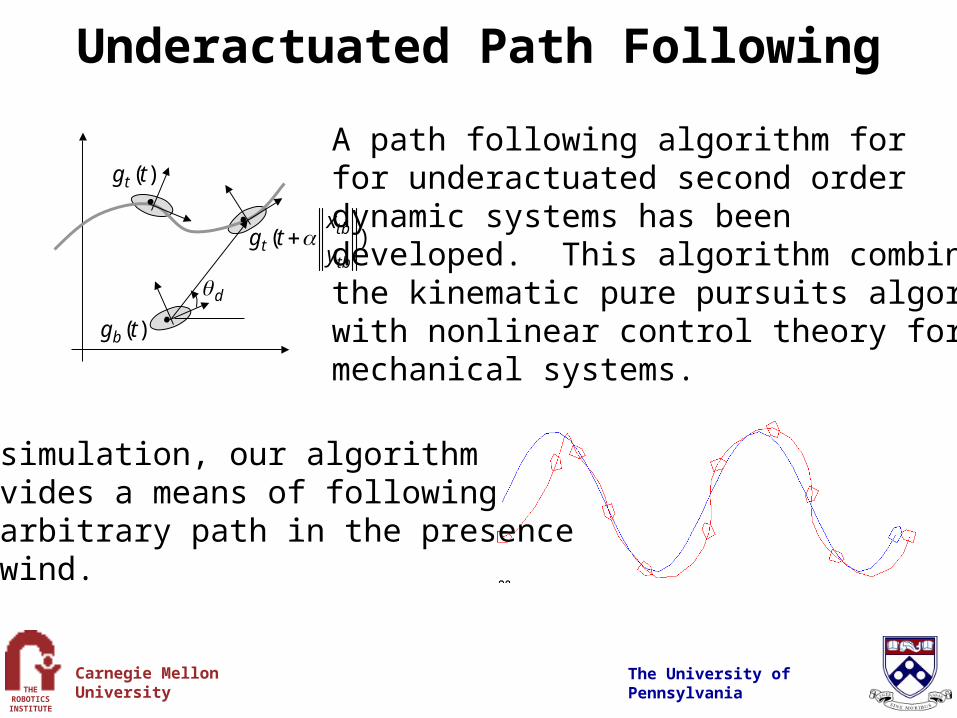
Underactuated Path Following
•
•
•
)(tgb
)(tgt
)(tb
tbt y
xtg
d
A path following algorithm for for underactuated second order dynamic systems has beendeveloped. This algorithm combines the kinematic pure pursuits algorithmwith nonlinear control theory for mechanical systems.
In simulation, our algorithmprovides a means of following an arbitrary path in the presenceof wind.
THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
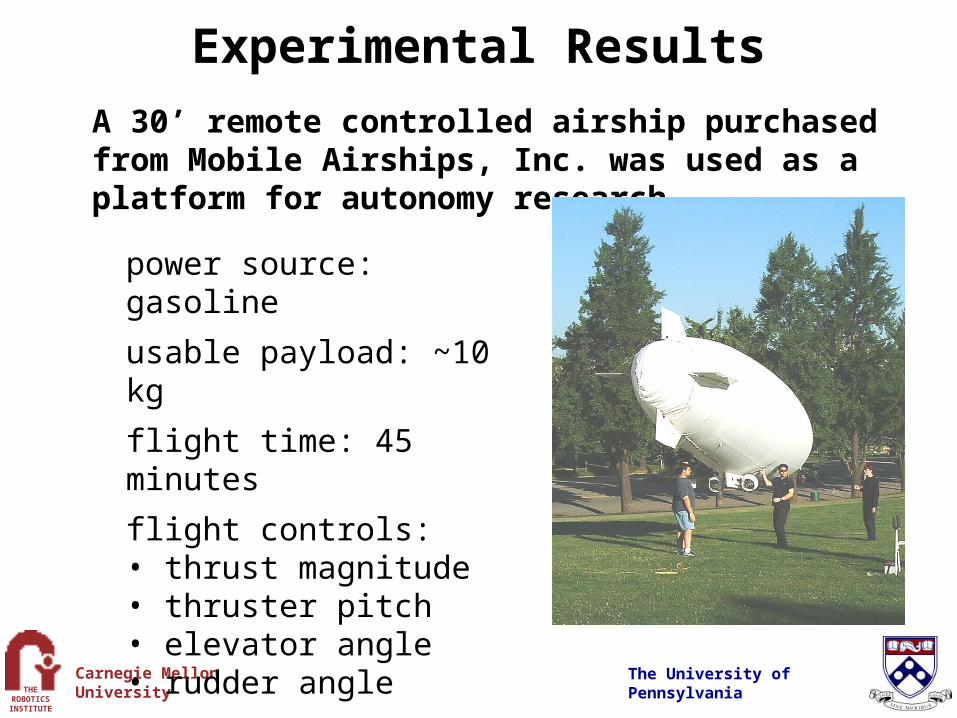
Experimental Results
A 30’ remote controlled airship purchased from Mobile Airships, Inc. was used as a platform for autonomy research.
power source: gasoline
usable payload: ~10 kg
flight time: 45 minutes
flight controls:• thrust magnitude• thruster pitch• elevator angle• rudder angle

THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
Sensor Integration
THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
Flight Test (ground video)

THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
Flight Test (onboard video)
THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
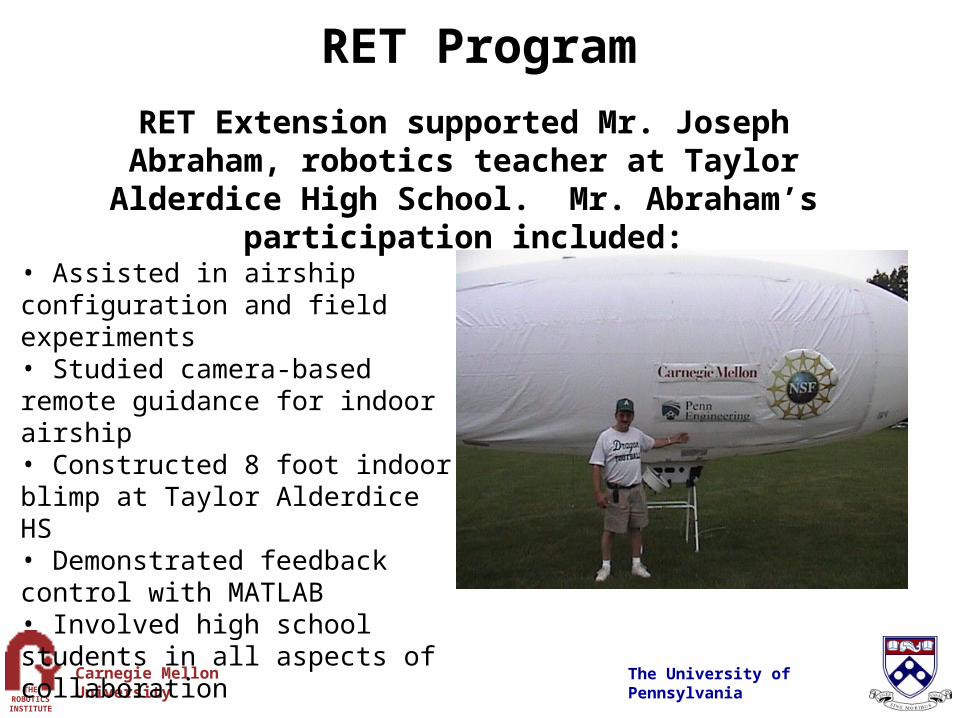
RET Program
RET Extension supported Mr. Joseph Abraham, robotics teacher at Taylor Alderdice High School.
Mr. Abraham’s participation included:
• Assisted in airship configuration and field experiments• Studied camera-based remote guidance for indoor airship• Constructed 8 foot indoor blimp at Taylor Alderdice HS• Demonstrated feedback control with MATLAB• Involved high school students in all aspects of collaboration
THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
STWING Blimp TeamThis project partially supported an undergraduate research team devoted to the study and development of autonomous
airships. The STWING Blimp team includes University of Pennsylvania students majoring in electrical engineering, mechanical engineering, computer science, and business.
THEROBOTICSINSTITUTE
Carnegie Mellon University The University of Pennsylvania
Conclusion
Near term goals:• Airship flight control and autonomy.• Collect environmental data in flight.
Long term goals:• Autonomous, solar powered airship.• Continuous, month-long flight.
Project Accomplishments:• Configured 30’ airship with computer, navigation sensors, and
carbon monoxide monitor. Tested in flight.• Studied solar power collection for airship.• Modeled airship dynamics.• Developed path planning algorithms.