-
Theoretical and Numerical Issues of Incompressible Fluid
Flows
Chapter 3: The Navier-Stokes Model
Instructor: Pascal Frey
Sorbonne Université, CNRS4, place Jussieu, Paris
University of Tehran, 2018
-
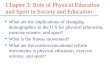
A classical example
• Von Karman vortex street: flow around a cylinder
Figure 1: Von Karman vortex street at various Reynolds
numbers.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 2/ 60
-
A classical example
• Von Karman vortex street: flow around a cylinder
Figure 2: Re
-
A classical example
• Von Karman vortex street: flow around a cylinder
Figure 3: Re ∼ 10 steady laminar flow (streamlines of
velocity).
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 4/ 60
-
A classical example
• Von Karman vortex street: flow around a cylinder
Figure 4: Re ∼ 100 Karman vortex street (streamlines of
velocity).
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 5/ 60
-
A classical example
• Von Karman vortex street: flow around a cylinder
Figure 5: Re ∼ 1e5 laminar flow with largely unsteady and
turbulent wake (Streamlines of turbulent kineticenergy).
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 6/ 60
-
A classical example
• Von Karman vortex street: flow around a cylinder
Figure 6: Re ∼ 1e6 steady fully turbulent flow field
(streamlines of velocity).
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 7/ 60
-
Section 3.1Mathematical and numerical analysis
-
The Navier-Stokes model
• Suppose the fluid is confined in a domain Ωt ⊂ Rd (i.e. an
open and connected regionin two or three dimensions of space), for
t ∈ [0, T ].
• We recall that the isothermal flow of Newtonian viscous fluids
of constant density ismodeled by the following Navier-Stokes
equations:
Given f, find u such that
ρ
(∂u
∂t+ (u · ∇)u
)− µ∆u+∇p = ρf , in Ωt × (0, T ) ,
div u = 0 , in Ωt × (0, T ) ,
(1)
where u represents the velocity [m/s], p the pressure [Pa =
n/m2], µ is the dynamicviscosity [kg/(ms)] ρ is the density [kg/m3]
and f denotes a density of volume forces permass unit [N/m3].
• The non-linear term (u · ∇)u corresponds to the convective
acceleration, while thediffusion term ∆u models the viscous
effects.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 9/ 60
-
The Navier-Stokes model
• By dividing both sides of the first equation by the constant
density ρ, we obtain thealternate formulation
Given f, find u such that∂u
∂t+ (u · ∇)u− ν∆u+
1
ρ∇p = f , in Ωt × (0, T ) ,
div u = 0 , in Ωt × (0, T ) ,
(2)
where ν = µ/ρ is the kinematic viscosity coefficient [m2/s].
• Introducing the Reynolds number Re = UL/ν = ρUL/µ, where L and
U are char-acteristic of the length and velocity scales of the
flow, and dividing both sides of (2) byU2/L, allows us to rewrite
the equations in a dimensionless form:
∂u
∂t+ (u · ∇)u−
1
Re∆u+∇p = f , in Ωt × (0, T ) ,
div u = 0 , in Ωt × (0, T ) .(3)
where the introduced the change of variables
x = x/L , t = t(U/L) , u = u/U , p = p/ρU2 , f = f(L/U2) .
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 10/ 60
-
The Navier-Stokes model
• solving the Navier-Stokes equations is a nontrivial task for
the following reasons:◦ the momentum equation is nonlinear◦ the
incompressibility condition div u = 0◦ solving the Navier-Stokes
equation amounts to solve a system of (d+ 1 if Ω ⊂ Rd)PDEs coupled
through the nonlinear term (u · ∇)u, the incompressibility
conditiondiv u = 0 and sometimes through the viscous term and the
boundary condition;
• a time discretization by operator splitting will partly
overcome these difficulties, in par-ticular to decouple the
difficulties associated to the nonlinearity whith those
associatedto the incompressibility condition.
• the numerical solution of time dependent PDEs by
operator-splitting methods has beenlargely studied by researchers,
but the specialists of ODEs have so far shown little inter-est in
splitting methods.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 11/ 60
-
Initial and boundary conditions
The Navier-Stokes model
• As such, problems (1) or (3) are not well-posed since these
equationsmay have an infinitenumber of solutions.
• It is mandatory to introduce further conditions, namely(a) an
initial condition (i.e. at time t = 0):
u(x,0) = u0(x) , in Ω (4)
where u0 is a given divergence-free vector field and(b) a
Dirichlet boundary condition:
u(x, t) = g(x, t) , on ∂Ω× (0, T ) , (5)
where g(x, t) is a given function defined over ∂Ω× (0, T ).If Ω
is bounded, then we have, thanks to the divergence theorem and the
continuitycondition, the compatibility condition:∫
∂Ωg(x, t) · nds =
∫Ω
div u(x, t) dx = 0 , (6)
where n is the outward unit normal to the domain boundary
∂Ω.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 12/ 60
-
Initial and boundary conditions
• Other boundary conditions, for example(c) mixed boundary
conditions:
u = g0 , on ΓD × (0, T ) σ n = g1 , on ΓN × (0, T ) (7)
ΓD and ΓN are such that Γ̊D ∩ Γ̊N = ∅, ΓD ∪ΓN = ∂Ω, g0 and g1
are two givenfunctions of (x, t).σ is the stress tensor: σ =
2µD(u)− p Idand D(u) is the deformation rate tensor: 2D(u) = ∇u+
(∇u)t.
(d) In applications, other mixed conditions are often
preferred:
u = g0 , on ΓD × (0, T ) µ∂u
∂n− p n = g1 , on ΓN × (0, T ) (8)
◦ Notice that in most applications, the function g1 is set to
zero in the Neumannboundary condition.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 13/ 60
-
Variational formulation
• We return to the Navier-Stokes equations in primitive
variables:
Given f, find u such that∂u
∂t+ (u · ∇)u− ν∆u+
1
ρ∇p = f , in Ωt × (0, T ) ,
div u = 0 , in Ωt × (0, T ) ,u = u0 , with div u0 = 0 ,
(9)
endowed with the following mixed boundary conditions:
u = g0 , on ΓD × (0, T ) σ n = g1 , on ΓN × (0, T )
where we considered σ = 2νD(u)−p
ρId . (10)
• The mathematical theory for the analysis of the Navier-Stokes
model and the estimationof the approximation error in finite
element method rely on functional analysis andSobolev spaces.
• In particular, the finite element approximation requires to
recast the Navier-Stokes equa-tions into a weak form.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 14/ 60
-
Weak form of the problem
• We introduce the Hilbert functional space
V = {v ∈ H10(Ωt) ; v = 0 on ΓD} ,
which is a Hilbert space for the scalar product and the norm
(u, v)H1(Ω) =∫
Ωu(x)v(x) dx+
∫Ω∇u(x) : ∇v(x) dx
‖u‖H1(Ω) =∫
Ω|u(x)|2 dx+
∫Ω|∇u|2 dx
• Space V will coincide with H10(Ωt) if the Dirichlet boundary
ΓD coincide exactly with∂Ωt. In this case, the prescribed Dirichlet
function g0 must be compatible with thedivergence-free constraint,
i.e.∫
∂Ωtg0 · nds =
∫Ωt
div udx = 0 .
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 15/ 60
-
Weak form of the problem
• By multiplying the first equation by a test function v ∈ V and
integrating over Ωt, weobtain for almost every t ∈ (0, T ):∫
Ωt
∂u
∂t·v dx+
∫Ωt
((u·∇)u)·v dx−∫
Ωtν∆u·v dx+
1
ρ
∫Ωt∇p·v dx =
∫Ωtf ·v dx .
• Green’s formula allows to rewrite the partial terms as
follows
−∫
Ωtν∆u · v dx =
∫Ωtν∇u : ∇v dx−
∫∂Ωt
ν∂u
∂nds∫
Ωt∇p · v dx =−
∫Ωtpdiv v dx+
∫∂Ωt
p v · nds
• Then, taking into account the mixed boundary conditions (10),
we have for almost everytime t in (0, T )∫
Ωt
∂u
∂t· v dx+
∫Ωt
((u · ∇)u) · v dx+∫
Ωtν∇u : ∇v dx−
1
ρ
∫Ωtpdiv v dx
=∫
Ωtf · v dx+
∫ΓN
g1 · v ds , ∀ v ∈ V (11)
completed with the Dirichlet boundary condition (10) on ΓD × (0,
T ).Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 16/ 60
-
Weak form of the problem
• As expected, the Neumann boundary condition σ n = g1 on ΓN ×
(0, T ) is naturallysatisfied by the formulation, which is often
called the variational formulation of themomentum equation.
• Introducing the deformation rate tensor D(u) yields the
following formulation, for al-most any t ∈ (0, T ):∫
Ωt
∂u
∂t· v dx+
∫Ωt
((u · ∇)u) · v dx+ 2ν∫
ΩtD(u) : D(v) dx−
1
ρ
∫Ωtpdiv v dx
=∫
Ωtf · v dx+
∫ΓN
g1 · v ds , ∀ v ∈ V (12)
completed with the Dirichlet boundary condition (10) on ΓD × (0,
T ).Likewise, the Neumann boundary condition is satisfied
automatically.
• Similarly for the continuity equation, we first multiply the
equation by a test function qin a space Q and then we integrate it
over Ωt, to obtain the equation:∫
Ωtq div udx = 0 , ∀ q ∈ Q . (13)
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 17/ 60
-
Existence of solution to the problem
Remark 1. (i) The main difference between this weak formulation
and the Stokes weak for-mulation is related to the convective term.
The latter is identified with a trilinear formc : H1(Ωt)3 → R that
will be defined later.
(ii) All integrals involved in the bilinear and the trilinear
forms are finite.
• The mathematical analysis of incompressible Navier-Stokes
equations for viscous flowshas been a topic of interest for almost
a century since they were introduced by Navierin 1822 and Stokes in
1845.
• The seminal work of Leray proved the existence of solutions
when the flow region is thefull space Rn.
• An early worthwhile result is due to J.L. Lions established
that if the flow domain is two-dimensional then the unsteady
Navier-Stokes equations lead a unique solution.
• In three dimensions of space, there is no theoretical result
about the uniqueness (andregularity) of a solution to the time-
dependent Navier-Stokes equations modelling theflow of
incompressible viscous fluids.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 18/ 60
-
The steady Navier-Stokes problem
• We first consider the steady Navier-Stokes equations that
describe the motion of anhomogeneous incompressible Newtonian
fluid.
• The motion is here independent of time.
• The problem is posed in a bounded domainΩ ⊂ Rd with a
Lipschitz continuous bound-ary ∂Ω and reads as follows:
Given f, find u such that
− ν∆u+ (u · ∇)u+1
ρ∆p = f , in Ω
div u = 0 , in Ω
(14)
In addition, we consider homogeneous Dirichlet boundary
conditions,
u = 0 , on ∂Ω , (15)
corresponding to the case where the fluid is confined in the
domain with fixed boundary.
• This problem close to the Stokes problem, except for the
presence of the non-linearconvective term (u · ∇)u) that makes it
much more difficult to solve.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 19/ 60
-
Mathematical results
• Let consider the functional spaces V = H10(Ω) and Q =
L20(Ω).
• The variational formulation is almost identical to the
formulation (11), except for theintegral of the time
derivative:Given f ∈ L2(Ω), find (u, p) such that for all v ∈
V∫
Ω((u ·∇)u) ·v dx+
∫Ων∇u : ∇v dx−
1
ρ
∫Ωpdiv v dx =
∫Ωf ·v dx+
∫ΓN
g1 ·v ds
(16)
• The weak formulation of the continuity equation is strictly
identical to equation (13):∫Ωq div udx = 0 , ∀ q ∈ Q . (17)
• The formulation (16) can be conveniently recast using bilinear
and trilinear forms.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 20/ 60
-
Mathematical results
• We introduce the bilinear forms a(·, ·) : (u, v) ∈ V × V →
a(u, v) ∈ R and b(·, ·) :(u, q) ∈ V ×Q→ b(u, q) ∈ R, (same as the
Stokes problem):
a(u, v) =∫
Ων∇u : ∇v dx =
∫Ων
d∑i=1
∇ui : ∇vi dx , (18)
b(u, q) = −∫
Ωdiv u q dx . (19)
and the trilinear form c(·; ·, ·) : (u,w, v) ∈ V × V × V →
c(w;u, v) ∈ R associatedwith the non-linear term and defined
as:
c(w;u, v) =∫
Ω((w · ∇)u) · v dx =
d∑i,j=1
∫Ωwj∂ui∂xj
vi dx . (20)
• We have already stated that the bilinear forms a(·, ·) and
b(·, ·) are continuous.
• The next two propositions give useful properties of the
trilinear form c(·; ·, ·).
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 21/ 60
-
Mathematical results
• We have the following results:Proposition 1. The trilinear
form c(·; ·, ·) is continuous on (H1(Ω))d.
• For any given u ∈ V , the map v 7→ c(u, u, v) is linear and
continuous on V .•
Proposition 2. Let u, v, w in H1(Ω) and let assume divw = 0 and
w · n|∂Ω = 0.Then, the trilinear form c : (H1(Ω))3 → R satisfies
the following properties, which areequivalent:
c(w; v, v) = 0 , (21)c(w;u, v) + c(w; v, u) = 0 . (22)
• Assume the constant density ρ = 1. We can recast the problem
(16):given f ∈ L2(Ω), find u ∈ V , p ∈ Q such that{
a(u, v) + c(u;u, v) + b(v, p) = (f, v) , for all v ∈ Vb(u, q) =
0 , for all q ∈ Q
. (23)
• A pair of function (u ∈ V, p ∈ Q) satisfying these equations,
given f ∈ L2(Ω), is aweak solution of the stationary Navier-Stokes
problem.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 22/ 60
-
The nonlinear term
different forms of the nonlinear term
• (u · ∇)u : convective form
• div(uut) : divergence form
• div(uut) + 12∇(utu) : divergence form with modified
pressure
• (∇× u)× u : rotational form (with modified pressure)
the equivalence of these forms can be established.
• from (u · ∇)u one can obtain:
(u · u)u+∇p = div(uut) +1
2∇(utu)−
1
2∇(utu) +∇p
= div(uut) +1
2(utu) +∇pmod with pmod = p−
1
2(utu) ;
• the convective form and the divergence form are trivially
equivalent since one gets:
div(uut) = (u · ∇u) + (div u)u = (u · ∇)u .
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 23/ 60
-
Properties of the convective term
Lemma 1 (basic properties). • let v be weakly differentiable,
then it is
(u · ∇)v = (∇v)u
• let u be weakly differentiable, then it holds
(u · ∇)u = D(u)u+1
2(div u)× u
• the variational form of the convective term is trilinear,
i.e., it is linear in each argument;
• let u, v, w ∈ H1(Ω), then
((u · ∇)v, w) = (div(vut), w)− ((div u)v, w) ,((u · ∇)v, w) =
(u,∇(v · w))− ((u · ∇)w, v) ,((u · ∇)v, w) = ((∇v)tw, u)
((u · ∇)v, w) =∫∂Ω
(u · n)(v · w) ds− (div u, v · w)− ((u · ∇)w, v) ,
where n is the outward unit normal to ∂Ω.
• let u, v ∈ H1(Ω), w ∈ Hdiv then
((∇× u)× v, w) = ((v · ∇)u,w)− ((w · ∇)u, v) .
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 24/ 60
-
Convective term
Lemma 2 (estimates of the convective term). Let u, v, w ∈ H1(Ω),
where Ω ⊂ Rd is abounded domain with Lipschitz boundary, then there
is a C ∈ R such that
((u · ∇)v, w) ≤ C‖u‖H1(Ω)‖∇v‖L2(Ω)‖w‖H1(Ω) ,
and from the divergence form of the convective term
((u · ∇)v, w) +1
2((div u)v, w) ≤ C‖u‖H1(Ω)‖∇v‖H1(Ω)‖w‖H1(Ω) ,
If w ∈ Vdiv then it is for the rotational form
((∇× u)× v, w) ≤ C‖u‖L2(Ω)‖∇v‖H1(Ω)‖w‖H1(Ω) .
Lemma 3 (estimate of the convective term). letu ∈ L2(Ω), v
∈W1,∞(Ω) andw ∈ H1(Ω)then
((u · ∇)v, w) ≤ ‖u‖L2(Ω)‖∇v‖L∞(Ω)‖w‖L2(Ω) .
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 25/ 60
-
Mathematical results
• Let consider the following divergence-free functional
subspaces:
Vdiv = {v ∈ H1(Ω) ; div v = 0} , and V 0div = {v ∈ Vdiv ; v = 0
on ΓD} ,
• Problem (23) has an equivalent form: find (u, p) ∈ V0
div × L20(Ω) such that
a(u, v) + c(u;u, v) + b(v, p) = (f, v) , for all v ∈ H10(Ω)
.(24)
If (u, p) is a solution to problem (23), then u is a solution to
problem (24). The converseis also true as stated next.
•
Lemma 4. Let Ω be a bounded domain of Rd with a
Lipschitz-continuous boundary ∂Ω.Given f ∈ L2(Ω), there exists at
least one pair (u, p) ∈ Vdiv×L20(Ω) which satisfiesproblem (24) or
equivalently problem (23).
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 26/ 60
-
Mathematical results
• Let consider the norm of the trilinear form (c·; ·, ·) of V 3
and recall the norm of V ′:
supu,v,w∈V
c(w;u, v)
|u|H1(Ω)|v|H1(Ω)|w|H1(Ω)= C , ‖f‖V ′ = sup
v∈V
(f, v)
|v|H1(Ω).
• The next result gives the uniqueness of a weak solution (u, p)
to the steady problem(24).
•
Theorem 1. Under the hypothesis of the previous lemma, and
assuming that
C
v2‖f‖V ′ ≤ 1 ,
then, problem (24) has a unique solution (u, p) in V ×
L20(Ω).
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 27/ 60
-
Boundary conditions
• From the numerical point of view, we have to consider two
types of boundary conditions:(i) artificial conditions: a virtual
boundary is considered, e.g. by introducing a wall to
account for the symmetry of the flow and reduce the size of
half;(ii) physical conditions: a boundary exists in the domain and
must be treated accord-
ingly, e.g. no-slip condition at wall.
• The homogeneous Dirichlet boundary condition u = 0, (no-slip),
is the correct andnatural condition for a viscous fluid contained
in a rigid domain. Indeed, the viscouseffect constraints the fluid
particles to adhere to the wall.
• When Dirichlet conditions u = g are specified on the whole
boundary ∂Ω, the pressuresolution is known up to a hydrostatic
constant only and then the function g has tosatisfies a
comptability condition: ∫
∂Ωg · nds = 0 .
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 28/ 60
-
Boundary conditions
• For specific applications or in different situations, more
appropriate boundary condi-tions need to be worked out.
• The problem of well-posed boundary conditions is thus a key
issue in many fields.◦ Slip boundary condition: the influence of
the wall rugosity on the slip behavior of thefluid is still a
matter of debate. In case of impermeable boundary, there is a
classicalcondition for the normal velocity component:
u · n = 0 , on ∂Ω
◦ For the tangential behavior however, the situation is less
clear. A complete slipboundary condition has been proposed:
u · n = [D(u) · n]tan = 0 , on ∂Ω ,
which means that the fluid is confined in the domain but the
fluid particle can slipalong the boundary.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 29/ 60
-
Boundary conditions
• Additional boundary conditions have been proposed:◦ Neumann
non-friction boundary conditions: used to prescribe a force per
unit areathat involves the normal component of the stress tensor
σ:
σn = (2µD(u)− p)n = g1 , on ΓN ,
where ΓN is a subset of ∂Ω.When g1 = 0, this condition is
usually used as an free outflow condition on afictitious boundary,
e.g. symmetry wall, or at the interfaces, e.g. free surfaces
orbetween two fluids. In this case, the part of the boundary ΓN is
called a free outflow.In other situations, g1 = −pen, where pe
denotes the external pressure.
◦ alternate boundary conditions and formulations for the viscous
term −ν∆u: whenthe coefficient ν is constant, the viscous term can
be rewritten in different equivalentforms:
ν∆u = div(ν(∇u+ (∇u)t)) (25)= −ν curl(curlu) = ν(∇(div u)−
curl(curlu)) . (26)
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 30/ 60
-
Boundary conditions
• Suppose Γn and Γτ are two subsets of ∂Ω, such that Γ̊n ∩ Γ̊τ =
∅, Γn ∪ Γτ = ∂Ω.
• We want to prescribe the normal and the tangent velocities on
Γn and Γτ , respectively:
u · n = gn , on Γn and n× (u× n) = gτ , on Γτ , (27)
where n denotes the outward normal vector to the domain
boundary, u · n is the com-ponent of u normal to the boundary and n
× u × n = u − (u · n)n represents theprojection of u onto the
tangent (plane) to the boundary.
• We introduce the functional spaces:
Vg = {v ∈ H1(Ω); v · n = gn on Γn , n× v × n = gτ on Γτ}V0 = {v
∈ H1(Ω) ; v · n = 0 on Γn , v × n = 0 on Γτ
and we consider here Q = L20(Ω) if Γn = ∂Ω) or Q = L2(Ω)
otherwise.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 31/ 60
-
Boundary conditions
• The weak formulation of problem (14) reads:find (u, p) ∈ Vg ×Q
such thata(u, v) + c(u;u, v) + b(v, p) = (f, v) + d(v) , for all v
∈ V0b(u, q) = 0 , for all q ∈ Q
. (28)
Here, we have introduced in the right-hand side a linear
functional d(·) defined as:
d(v) =∫∂Ω\Γn
r v · nds+∫∂Ω\Γτ
s · v × nds ,
where the functions r and s have a physical meaning.
• Taking for a(·, ·) the form (18), the natural boundary
conditions become
−p+ νn · ∇u · n = r , on ∂Ω\Γn , (29)νn · ∇u× n = s , on ∂Ω\Γτ
(30)
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 32/ 60
-
Boundary conditions
• As such, these conditions have no physical meaning, and the
boundary conditions (27)must be imposed on all boundaries.
• For more pratical conditions, e.g. for free-surface problems
or artifical outflow bound-aries, one may prefer dealing with the
formulation (25) for the viscous term associatedwith the bilinear
form:
a(u, v) =1
2
∫ΩνD(u) : D(v) dx , where 2D(u) = ∇u+ (∇u)t .
And the natural boundary conditions write:
−p+ 2νn ·D(u) · n = r , on ∂Ω\Γn , (31)2νn ·D(u)× n = s , on
∂Ω\Γτ (32)
where r and s are then the normal and tangent stresses,
respectively.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 33/ 60
-
Non-linear iterative procedures
model: the main difference with Stokes equations is the presence
of nonlinear terms in the(stationary) Navier-Stokes equations.
• we need iterativemethods to solve incompressible flows; the
literature contains a varietyof such methods which are all based on
a linearization of the equations.
• given an initial guess, u0 ∈ H1(Ω), a sequence of iterates
{uk}k=1,...,n ∈ H1(Ω) iscomputed which is expected to converge
towards the solution of the weak formulation.
• the fixed-point (Picard) linearization of the stationary
Navier-Stokes equations (14) leadsto a sequence of so-called Oseen
problems, i.e., linear problems (endowed with bound-ary conditions
(14)) of the form
− ν∆u+ (w · ∇)u+cu+∇p = f , in Ω ,div u = 0 , in Ωu = 0 , on
∂Ω
(33)
where w ∈ V is the approximation of the solution from the
previous Picard iteration.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 34/ 60
-
Weak solution of Oseen problem
• the weak form of Oseen problem reads as follows:given w ∈ V ,
find (u, p) ∈ V ×Q such that
ν(∇u,∇v) + ((w · ∇)u+cu, v)− (div v, p) = (f, v) ∀v ∈ V−(div u,
q) = 0 ∀q ∈ Q
(34)
Theorem 2 (Existence and Uniqueness of a Weak Solution of the
Oseen Equations).LetΩ be a bounded domain in Rd, d = 2,3, with a
Lipschitz continuous boundary ∂Ω;and let the conditions on the data
of the Oseen problem be fulfilled (w in Ld+1(Ω)),u, v ∈ Lq(Ω).
Then, there exists a unique solution u, p ∈ H10(Ω)× L
20(Ω) of (34).
Lemma 5 (stability of the solution). under the conditions of the
theorem, the solutionof the Oseen problem (34) depends continuously
on the data of the problem:
ν
2‖∇u‖2
L2(Ω)+‖c1/2u‖2
L2(Ω) ≤1
2ν‖f‖2
H−1(Ω)‖∇u‖
if f ∈ L2(Ω) and c(x) ≥ c0 > 0, then we have also the
stability bound
ν‖∇u‖2L2(Ω)+
1
2‖c1/2u‖2
L2(Ω) ≤1
2c0‖f‖2
L2(Ω)‖∇u‖
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 35/ 60
-
Oseen iteration
• the weak formulation of the Oseen problem is:given w ∈ V ,
find (u, p) ∈ V ×Q such that{
a(u, v) + c(w, u, v) + b(v, p) = (f, v) , for all v ∈ Vb(u, q) =
0 for all q ∈ Q .
• the Oseen-iteration is a secant modulus method, where the
equations are linearized byfreezing the nonlinearity: the first
term in c(·, u, v) is evaluated at the last iterate;
Algorithm 1 (Oseen iteration). :for k = 0,1,2, . . .
given uk ∈ V, pk ∈ Q, solve (uk+1, pk+1)a(uk+1, v) + c(uk, uk+1,
v) + b(v, pk+1) = (f, v) , for all v ∈ Vb(uk+1, q) = 0 for all q ∈
Q .
(35)
• At each iteration step k, one linear system (35) has now to be
solved.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 36/ 60
-
Oseen iteration
• note that the previous result does not depend on the size of
the data;
• however, if the data are larger the numerical solution of the
Oseen equation is diffi-cult (similar to the Navier–Stokes
equations with large Reynolds number) and it is notguaranteed that
the nonlinear iteration converges.
• the convergence of the Oseen–Iteration can be shown for small
data using the Banachfixed point theorem:
Theorem 3. if ν2 ≥ C‖f‖L2(Ω), the iterate uk obtained from the
Oseen method con-
verge to the unique solution (u, ) ∈ V ×Q of the Navier-Stokes
problem.
• in general, the rate of convergence of Oseen iteration is
linear.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 37/ 60
-
Newton method
• the Newton method seems appealing because of its theoretical
potential to achievequadratic convergence rate.
• consider the abstract problem of finding the root x̃ of a
general nonlinear function f ,f(x) = 0.
• suppose xk is an approximate solution of the root x̃.
• then, by a Taylor expansion around an initial guess xk we
write
0 = f(x̃) = f(xk) + f′(xk)(x̃− xk) + o(|x̃− xk|)
≈ f(xk) + f ′(xk)(x̃− xk) ,(36)
and thus
x̃ ≈ xk − [f ′(xk)]−1 f(xk) .
• Newton’s method for solving f(x) = 0 writes:
xk+1 = xk − [f ′(xk)]−1 f(xk) , k = 0,1,2, . . .
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 38/ 60
-
Newton’s method
• likewise, let define the function for the Navier-Stokes
model:
f(u,∇u) = (u · ∇)u .
• in this case, a Taylor expansion of f(·,∇·) around uk,∇uk
reads
fk+1(u,∇u) ≈ fk(uk,∇uk) + (uk+1 − uk) ·∂fk∂u
+∇(uk+1 − uk) ·∂fk∂∇u
.
• neglecting the quadratic terms and substituting the definition
of f(·,∇·) yields
uk+1 · ∇uk+1 ≈ uk · ∇uk + δk · ∇uk +∇δk · uk= uk+1 · ∇uk + uk ·
∇uk+1 − uk · ∇uk ,
(37)
which forms the kernel of the classical Newton linearization of
the nonlinear term.
• The convergence rate is quadratic; if ‖u− u0‖ ≤ δ
‖uk+1 − u‖ ≤ M‖uk − u‖2 , and ‖uk − u‖ ≤(Mδ)2k
M,
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 39/ 60
-
Newton’s method
• Newton’s method applied to the weak formulation of the
stationary Navier-Stokes prob-lem and using identity (37) takes the
following form:
Algorithm 2 (Newton-method).
for k = 0,1,2, . . .1. given uk ∈ V, solve δuk ∈ V
a(δuk, v) + c(uk, δuk, v) + c(δuk, uk, v) =
−(a(uk, v) + c(uk, uk, v)− (fk, v)
)2. update uk+1 = uk + δuk ;
(38)
• an important aspect for Newton-type methods is the starting
value, since one only ob-tains local convergence in general.
• one possibility is to use some steps of an Oseen-iteration
first, and to use the result asa starting value for a Newton
method.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 40/ 60
-
Section 3.2Discretization procedures
-
Unsteady Navier-Stokes equations
• We return to the unsteady Navier-Stokes equations:
Given f, find u such that∂u
∂t+ (u · ∇)u− ν∆u+
1
ρ∇p = f , in Ωt × (0, T ) ,
div u = 0 , in Ωt × (0, T ) ,u = u0 , with div u0 = 0 ,
(39)
endowed with the conditions (to be well-posed):
u = g , on ∂Ω× (0, T ) with∫∂Ω
g(t) · nds = 0 , on (0, T ) (40)
• Then, we have for almost every time t in (0, T )∫Ωt
∂u
∂t· v dx+
∫Ωt
((u · ∇)u) · v dx+∫
Ωtν∇u : ∇v dx−
1
ρ
∫Ωtpdiv v dx
=∫
Ωtf · v dx , ∀ v ∈ V (41)
completed with the Dirichlet boundary condition on ∂Ω× (0, T
).
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 42/ 60
-
Temporal discretizations
• discretization in time:θ-schemes use the following strategy
for the full discretization and linearization:1.
semi-discretization of (41) in time. The semi-discretization in
time leads in eachdiscrete time to a nonlinear system of equations
of saddle point type.
2. variational formulation and linearization. The nonlinear
system of equations is refor-mulated as variational problem and the
nonlinear variational problem is linearized.
3. discretization of the linear systems in space. The linear
system of equations arising ineach step of the iteration for
solving the nonlinear problem is discretized by a finiteelement
discretization using, e.g., an inf-sup stable pair of finite
element spaces.
• this approach, which applies first the discretization in time
and then in space, is alsocalled method of Rothe or horizontal
method of lines. The other way, discretizing first inspace to get
an ordinary differential equation and then in time, is called
vertical) methodof lines.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 43/ 60
-
Temporal discretizations
one step θ-schemes for the Navier-Stokes equations
• let θ ∈ [0,1] and consider the time step from tn to tn+1.
• one step θ-schemes for the Navier-Stokes equations are of the
form:
un+1
∆tn+1+ θ
(−ν∆un+1 + (un+1 · ∇)un+1
)+∇pn+1 =
un
∆tn+1− (1− θ) (−ν∆un + (un · ∇)un) + (1− θ)fn + θfn+1
and div un+1 = 0 (42)
• explicit and implicit Euler scheme, Crank–Nicolson
scheme:three well known one-step θ-schemes are obtained by an
appropriate choice of:◦ θ = 0: forward or explicit Euler scheme,◦ θ
= 1/2: Crank–Nicolson scheme,◦ θ = 1: backward or implicit Euler
scheme.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 44/ 60
-
Temporal discretizations
one step θ-schemes for the Navier-Stokes equations
• forward or explicit Euler scheme: the appearance of the
viscous term leads to a stiffODE with respect to time. From the
numerical analysis of ODEs, it is known that explicitschemes have
to be used with very small time steps for stiff problems to obtain
stablesimulations.For the Navier–Stokes equations, the time step
has to be usually so small that the sim-ulations become very
inefficient, hence not recommended for the discretization.
• backward or implicit Euler scheme: this first order scheme is
quite popular. However,the use of the backward Euler scheme in
combination with higher order discretizationsin space might lead to
rather inaccurate results, compared with the results computedwith
higher order temporal discretizations.
• Crank–Nicolson scheme: is a second order scheme whose use is
very popular.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 45/ 60
-
Temporal discretizations
concerning the incompressibility constraint
• the temporal derivative is approximated in (42) at tn +
θtn+1.Thus, the velocity is approximated at this time and the
pressure acts as a Lagrangianmultiplier for this velocity.
• for instance, in the case of the Crank-Nicolson scheme, the
computed solution approxi-mates (un+1/2, pn+1/2).
• if one is interested in a good approximation of the pressure
at time tn+1, one has tomodify the pressure term in the
Crank–Nicolson scheme to
1
2(pn+1 + pn) .
• however, this scheme requires in the first step the pressure
at the initial time.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 46/ 60
-
Discretization in space
• We perform the space discretization of the NS system as
previously, to find (uh, ph) inVh ×Qh for all t ∈ (0, T ) such
that:
∫Ωt
∂uh∂t· vh dx+
∫Ωt
((uh · ∇)uh) · vh dx+∫
Ωtν∇uh : ∇vh dx
−1
ρ
∫Ωtph div vh dx =
∫Ωtfh · vh dx , ∀vh ∈ V0h∫
Ωtdiv uhqh dx = 0 ∀qh ∈ Qh
uh = gh(t) on ∂Ωtuh(0) = u0h
• The finite element spaces Vh and Qh are classically
V0h = Vh ∩(H10(Ωt)
)2= {vh ∈ Vh ; vh = 0 on ∂Ωt} ,
• The function fh, u0h and gh are convenient approximations of
f, u0 and g and gh mustverify ∫
∂Ωtgh(t) · nds = 0 on (0, T ) .
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 47/ 60
-
Operator splitting
We introduce a θ-scheme (Glowinski, 1985) to discretize an
initial value problem:
∂u
∂t+A(u, t) = 0 , with u(0) = u0 .
• Let θ be a number in the open interval (0,1/2),
• the scheme applied to the solution of this problem, when A =
A1 +A2, solves un+θ,un+1−θ and un+1
• it writes:
u0 = u0un+θ − un
θδt+A1(u
n+θ, (n+ θ)δt) +A2(un, nδt) = 0
un+1−θ − un+θ
(1− 2θ)δt+A1(u
n+θ, (n+ θ)δt) +A2(un+1−θ, (n+ 1− θ)δt) = 0
un+1 − un+1−θ
δt+A1(u
n+1, (n+ 1)δt) +A2(un+1−θ, (n+ 1− θ)δt) = 0
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 48/ 60
-
Time discretization procedures
• The full discretization of unsteady Navier-Stokes equations by
a θ-scheme leads to thefollowing systems:◦ initializations and
parameter settings:u
0h = u0hθ = 1− 1/
√2 , α = (1− 2θ)/(1− θ) , β = θ/(1− θ) ,
◦ and then, unh being know,
◦ compute first (un+θh , pn+θh ) ∈ Vh ×Qh by solving the
elliptic systems, for n ≥ 0:
∀vh ∈ V0h,
∫Ωt
un+θh − unh
θδt· vh dx+ αν
∫Ωt∇un+θh : ∇vh dx−
∫Ωtpn+θh div vh dx
=∫
Ωtfn+θh · vh dx− βν
∫Ωt∇unh : ∇vh dx−
∫Ωt
(unh · ∇)unh · vh dx∫
Ωtdiv un+θh qh = 0 , ∀qh ∈ Qh
un+θh = gn+θh on ∂Ωt
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 49/ 60
-
Time discretization procedures
◦ compute un+1−θh ∈ Vh, for all vh ∈ V0h
∫Ωt
un+1−θh − un+θh
(1− 2θ)δt· vh dx+ βν
∫Ωt∇un+1−θh : ∇vh dx
+∫
Ωt(un+1−θh · ∇)u
n+1−θh · vh dx
=∫
Ωtfn+θh · vh dx− αν
∫Ωt∇un+θh : ∇vh dx−
∫Ωtpn+θh div vh dx
un+1−θh = gn+1−θh on ∂Ωt ,
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 50/ 60
-
Time discretization procedures
◦ and finally compute (un+1h , pn+1h ) ∈ Vh ×Qh
∫Ωt
un+1h − un+1−θh
(θ)δt· vh dx+ αν
∫Ωt∇un+1h : ∇vh dx−
∫Ωtpn+1h div vh dx
=∫
Ωtfn+1h · vh dx− βν
∫Ωt∇un+1−θh : ∇vh dx
−∫
Ωt(un+1−θh · ∇)u
n+1−θh · vh dx∫
Ωtdiv un+1h qh dx = 0 ∀qh ∈ Qh
un+1h = gn+1h on ∂Ωt ,
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 51/ 60
-
Discretization of the total derivative
• Until now, the term (u · ∇)u was treated as a general
nonlinearity;
• However, in Navier-Stokes equations, the term
ρ
(∂u
∂t+ (u · ∇)u
)models the transport of the momentum ρu by the velocity field
u.
• The idea of combining FE approximations and methods of
characteristics for numericalsimulations of incompressible viscous
fluid flows is quite old (1970’s): J.P. Benque, O.Pironneau,
Gresho, . . . but still considered a bit "exotic".
• Despite the simplicity of the principle that underlies
themethods of characteristics, theirpractical implemntation is
delicate and not fully understood;
• "Any method for approximating hyperbolic equations sacrifices
a good deal if it takes noaccount of the method of characteristics"
(Morton, 1992),"Numerical schemes that follow characteristics
backward in time and then interpolateat their feet have a history
stretching back in the very early days of computational
fluiddynamics" (Courant et al., 1952).
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 52/ 60
-
Solution of transport problems
• We introduce the method of characteristics to solve a
transport problem:∂ϕ
∂t+ u · ∇ϕ = 0 in Ω× (0, T )
ϕ(0) = ϕ0
ϕ = g on Γ− × (0, T )
(43)
with∂u
∂t= 0 div u = 0
∂g
∂t= 0
and
Γ− = {x ∈ ∂Ω, u(x) · n(x) < 0} .
• Let consider (x∗, t∗) ∈ Ω× (0, T ); we associate the solution
of the systemdX
dt= u(x)
X(t∗) = x∗
the solution of this system is X(·;x∗, t∗)
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 53/ 60
-
Solution of transport problems
• The curve Cx∗,t∗ described by the points {X(t;x∗, t∗), t} as t
varies is called the char-acteristic curve associated to the
transport equation (43) and to {x∗, t∗}.
• Suppose ϕ is solution of (43) and restrict it to the curve
Cx∗,t∗, we have then
d
dtϕ(X(t;x∗, t∗), t) =
(∂ϕ
∂t+ u · ∇ϕ
)(X(t;x∗, t∗), t) = 0 .
• this shows that ϕ is constant along the curve Cx∗,t∗.
• it follows that if ϕ solve (43), we have, for τ > 0
sufficiently small, the relation
ϕ(x, t) = ϕ(X(t− τ ;x, t), t− τ) .
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 54/ 60
-
Time discretization procedures
• The backward method of characteristics can be used to solve
Navier-Stokes problem:◦ initialization
u0 = u0
◦ and for n ≥ 0:un+1 − un∗
δt− ν∆un+1 +∇pn+1 = fn+1 in Ωt
div un+1 = 0 , in Ωtun+1 = gn+1 on ∂Ωt ;
(44)
◦ where un∗ is obtained by solving the system:dX
dt= un(X) on (0, δt)
X(δt) = x(45)
we denote by Xn(·, x) the solution of the problem (45).◦ We take
un∗(x) = un(Xn(0, x))
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 55/ 60
-
Section 3.3Numerical examples
-
2d lid-driven cavity
• classical test case: simulations for Reynolds number ranging
from 400 up to 10000.◦ problem involves a primary vortex at the
cavity center and vortices in the corners,◦ number of vortices
increases with Re and position of the center of primary vortexmoves
toward the center,
◦ 4 meshes have been used: a regular triangulation (2,461 nodes,
5,000 elements);a uniform triangulation (2,143 nodes, 4,136
elements); a refined uniform trian-gulation (8,421 nodes, 16,544
elements); and a regular triangulation (10,201nodes, 20,000
elements);
◦ results in good accordance with experimental results (Ghia et
al.).
Re = 400 Re = 1,000 Re = 5,000 Re = 10,000
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 57/ 60
-
Backfacing step
• we consider a two-dimensional channel flow over a
downstream-facing step.
• it consists in an upstream channel of height h followed by a
suddenly enlarged channelof height H = 2h.
• the channel lengths of the portions situated upstream and
downstream of the backstepare l0H and l1H , respectively.
• at the upstream end of the channel there is a fully developed
laminar flow defined bythe steady axial velocity
u(y) = 24u0y(0.5− y) , for x = −l0 and y ∈ [0,0.5]
where u0 represents the mean axial flow velocity.
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 58/ 60
-
Backfacing step
• in the unsteady flow case, a portion of the lower wall of
lengthHl, situated just behindthe downstream-facing step, is
assumed to execute transverse oscillations defined bythe following
lower wall equation:
Hy =
{Hg(x, t)− hs for x ∈ [0, l]− hs for x > l
where g(x, t) is a sinusoidal-shape mode defined as
g(x, t) = e(t) sin(πx/l) where e(t) = A cos(ωt)
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 59/ 60
-
Backfacing step
• in the unsteady flow case, a portion of the lower wall of
lengthHl, situated just behindthe downstream-facing step, is
assumed to execute transverse oscillations.
Backward facing step: Backward facing step
reprinted from [Mateescu D., J. Fluids and Structures, 2001]
Theoretical and numerical issues for Incompressible Fluid Flows
University of Tehran, April-May, 2018 60/ 60
/Users/frey/papiers/figures/visco.movMedia File
(video/quicktime)



![Chaos, Solitons and Fractals - Brown University · 328 F. Song, G.E. Karniadakis / Chaos, Solitons and Fractals 102 (2017) 327–332 incompressible flows [17,18] and for the fractional](https://img.pdfslide.net/doc/110x75/5f703e3061762a11ee05c214/chaos-solitons-and-fractals-brown-university-328-f-song-ge-karniadakis-.jpg)