Embed Size (px)
Citation preview

ORIGINAL PAPER
Thermal Elastohydrodynamic Lubrication of Point ContactsUsing a Newtonian/Generalized Newtonian Lubricant
W. Habchi Æ D. Eyheramendy Æ S. Bair ÆP. Vergne Æ G. Morales-Espejel
Received: 4 December 2007 / Accepted: 25 February 2008 / Published online: 8 March 2008
Springer Science+Business Media, LLC 2008
Abstract The classical ElastoHydroDynamic (EHD)
theory assumes a Newtonian lubricant and an isothermal
operating regime. In reality, lubricating oils do not behave
as perfect Newtonian fluids. Moreover, in most operating
conditions of an engineering system, especially at high
speeds, thermal effects are important and temperature can
no longer be considered as constant throughout the system.
This is one reason why there has always been a gap
between numerical results and experimental data. This
paper aims to show that this gap can be reduced by taking
into consideration the heat generation that takes place in
the contact and using appropriate rheological models. For
this, a unique thermal ElastoHydrodynamic lubrication
model is developed for both Newtonian and non-Newto-
nian lubricants. Pressure, film thickness and traction results
are then compared to their equivalent isothermal results
and experimental data. The agreement between thermal
calculations and experiments reveals the necessity of con-
sidering thermal effects in EHD models.
Keywords EHL with non-Newtonian lubricants Thermal effects in EHL
Nomenclature
q Lubricant’s density
g Generalized Newtonian viscosity
l Newtonian viscosity
H Film thickness
p Pressure
ph Hertzian contact pressure
a Hertzian contact radius
x,y,z Space coordinates
Um Mean entrainment velocity
U Elastic displacement vector (U = u, v, w)
L Load
ui Surface velocity of body i
uf, vf Fluid flow velocity components in the x- and
y-directions, respectively
h0 Film thickness equation constant
R Ball’s radius
r Stress tensor
e Strain tensor
C Compliance matrix
T Temperature
T0 Ambient temperature
TR Reference temperature
ci Heat capacity of body i
qi Density of body i
ki Thermal conductivity of body i
Ei Young’s modulus of body i
ti Poisson’s ratio of body i
xin Inlet abscissa of the contact
p+ Positive part of the pressure distribution
l0 Lubricant’s zero pressure Newtonian
viscosity
W. Habchi (&) D. Eyheramendy P. Vergne
LaMCoS, INSA-Lyon, CNRS UMR5259, Lyon 69621, France
e-mail: [email protected]
D. Eyheramendy
Ecole Centrale Marseille, Laboratoire de Mecanique
et d’Acoustique, 13451 Marseille Cedex 20, France
S. Bair
G.W. Woodruff School of Mechanical Engineering,
Centre for High-Pressure Rheology, Georgia Institute
of Technology, Atlanta, GA 30332-0405, USA
G. Morales-Espejel
SKF Engineering and Research Center, Nieuwegein,
The Netherlands
123
Tribol Lett (2008) 30:41–52
DOI 10.1007/s11249-008-9310-9

q0 Lubricant’s zero pressure density
SRR Slide-to-roll ratio = 2(us - up)/(us + up)
Hc Central film thickness
Hmin Minimum film thickness
HcminMinimum film thickness on the central line
of the contact in the x-direction
K0,K0
0,B,R0 Tait-Doolittle model constants
Gc,nc Carreau equation constants
l1,l2 Low-shear and high-shear limiting
viscosities, respectively
bK,ec,aV Tait-Doolittle model constants
DT Temperature variation = T-T0
Dimensionless parameters
M, L Dimensionless Moes–Venner parameters
P ¼ pph
q ¼ qq0
l ¼ ll0
H ¼ hRa2
X ¼ xa Y ¼ y
a Z ¼za :Solids p and s
zh :Lubricant
1 Introduction
Lubrication of machine elements plays an important role in
the proper functioning of a mechanical system, preventing
metal-to-metal contact which may damage the system and
lead to failure. This also reduces the energy consumption of a
machine since friction forces become less important when
surface separation is ensured by a complete lubricant film. In
many operating conditions, the pressure generated in the
lubricant film is high enough to induce a considerable elastic
deformation of the contacting bodies. This lubrication
regime is known as ElastoHydroDynamic (EHD).
The classical isothermal EHD theory assumes a Newto-
nian lubricant and an isothermal operating regime. But, in
most operating conditions these assumptions fail in repre-
senting the physical reality of the contact. In fact, lubricants
show a non-Newtonian response at high shear stresses.
Moreover, at high speed and/or load operating conditions, or
at high sliding velocities, the heat generation in the lubricant
film becomes important. Therefore, temperature effects
cannot be considered as negligible. In fact, an increase in
temperature leads to a decrease in the viscosity of the
lubricant which induces a reduction in both film thickness
and traction force. The interest in thermal effects for EHD
lubrication first appeared with the pioneering theoretical
work of Cheng [1, 2]. The first full numerical solution for the
point contact problem was obtained by Zhu and Wen [3].
Since then, several authors have proposed different methods
to deal with this problem assuming a Newtonian or a non-
Newtonian lubricant such as Kim and Sadeghi [4], Guo et al.
[5] and also Liu et al. [6] who solved the three-dimensional
energy equation to determine the temperature variations
throughout the lubricant film. An alternative method was
proposed by Kim et al. [7] who reduced the 3-D heat transfer
problem to a 2-D one by assuming a parabolic distribution of
the temperature across the film thickness. However, the
parabolic temperature profile simplification leads to tem-
perature predictions that are not accurate especially at the
inlet of the contact. The reason lies in the complex thermal
convective effects which are associated with important
reverse flows in this area. This is why, in this work, a full
resolution of the energy equation applied to both contacting
solids and the lubricant film is adopted.
Until now, most of the thermoelastohydrodynamic
lubrication (TEHL) numerical models used rheological
models such as the sinh-law [8] model for non-Newtonian
behaviour, the Barus [9] and Roelands [10] equations for
viscosity–pressure–temperature dependence and also the
Dowson and Higginson [11] relationship for density–
pressure–temperature dependence. Although these models
have been used for a long time in the field of Tribology, it
is recognized that they do not always describe the real
physical behaviour of a typical lubricant. This may explain
(in part) the discrepancy observed between numerical
results and experiments. The only reason for their extensive
use was their simple mathematical form, well adapted for
EHL solvers. In this paper, more realistic models are used
to define the rheology of both Newtonian and non-New-
tonian lubricants. This leads to a good agreement between
numerical results and experimental data.
2 Numerical Model
In this section, the global numerical procedure used for the
modelling of the TEHL of circular contacts is described.
The goal is to model a lubricated contact between a sphere
and a plane under a prescribed external load. Both con-
tacting bodies are elastic and have constant surface
velocities. Surface separation is ensured by a complete
lubricant film.
2.1 Thermal EHL Equations
The Reynolds equation for a steady-state point contact
lubricated with a generalized Newtonian lubricant under
thermal EHL operating regime and unidirectional surface
velocities in the x-direction is given by Yang and Wen [12]:
o
ox
qg
e
h3 op
ox
þ o
oy
qg
e
h3 op
oy
¼ 12
o
oxqUmhð Þ;
ð1Þ
42 Tribol Lett (2008) 30:41–52
123

where
Um ¼ upþus
2qg
e¼ 12
geq0e
g0e q00e
q ¼ q0ege usupð Þþqeup½ Um
qe ¼ 1h
R h
0qdz
q0e ¼ 1h2
R h0
qR z
0dz0
g dz q00e ¼ 1h3
R h0
qR z
0z0dz0
g dz1ge¼ 1
h
R h
0dzg
1g0e¼ 1
h2
R h
0zdzg
Note that this equation accounts for the variations of
both density and viscosity across the film thickness as can
be seen in the integral terms. In fact, the changes in density
are due to temperature variations across the lubricant film
whereas the changes in viscosity stem from both
temperature and (when a generalized Newtonian lubricant
is considered) shear rate variations across the film.
Moreover, both density and viscosity are allowed to vary
with pressure and temperature throughout the lubricant
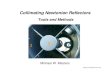
film. Equation 1 is solved on the 2-D contact area Xc (see
Fig. 1). Indices p and s correspond to the plane and the
sphere, respectively, and g is the generalized Newtonian
viscosity defined as:
g ¼ se
f se; lð Þ with f se; lð Þ ¼ _ce:
where se and _ce are the equivalent shear stress and shear
rate, respectively, given by:
se ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffis2
xz þ s2yz
q_ce ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi_c2
xz þ _c2yz
q
And the function f could stand for any generalized
Newtonian model, e.g. Eyring [8] or Carreau [13]. In the
case of a Newtonian lubricant, the generalized Newtonian
viscosity is replaced by the normal Newtonian viscosity,
g = l. This way, Eq. 1 becomes the classical Reynolds
[14] equation. Thus, the same model can be used for both
Newtonian and non-Newtonian lubricants.
The boundary conditions for the previous equation
consist in putting to zero the pressure on the boundary of
the contact area qXc. As for the free exit boundary prob-
lem, a Heavyside function Hs(p) is defined as:
Hs pð Þ ¼ 1 if p [ 0
0 if p 0
Let p+ = p 9 Hs(p) be the positive part of the pressure
distribution p. It is used to define both the density–pressure
and viscosity–pressure dependence and it also serves as a
normal load in the boundary condition for the elastic
deformation calculation. This is sufficient to handle the
free boundary problem at the outlet area of the contact as
shown in [15].
The film thickness equation is given by:
h x; yð Þ ¼ h0 þx2 þ y2
2R w x; yð Þ: ð2Þ
The normal elastic displacement of the contacting
bodies w(x,y) is obtained by solving the linear elasticity
equations on both the sphere and the plane. The latter are
large enough compared to the contact size to be considered
as semi-infinite structures. This is why their geometry is
defined by a large 3-D cubic structure. Let X be the interior
domain of the structure, qX its boundary and Xc the part of
the upper boundary that corresponds to the contact domain
(see Fig. 1). The linear elasticity equations consist in
finding the displacement vector U on the computational
domain X such that:
div rð Þ ¼ 0 with r ¼ Ce Uð Þ and U ¼ u; v;wf g ð3Þ
with the following boundary conditions:
U ¼ 0 at the bottom boundaryoXb
rn ¼ pþ at the contact area boundaryXc
rn ¼ 0 elsewhere
8<:
To simplify the previous model and reduce the
computational effort, an equivalent problem is defined
to replace the two identical problems of the elastic
deformation calculation for both contacting bodies. This
equivalent problem is obtained by the superposition of the
two linear problems. Let (Ep,tp) and (Es,ts) be the material
properties (Young’s modulus and Poisson’s ratio) of the
two bodies. The equivalent problem is defined by applying
Eq. 3 to a body that has the following material properties:
Eeq ¼E1E2
E1 þ E2
teq ¼tpEs þ tsEp
E1 þ E2
:
For more details about this model the reader is referred to
[15].
X
ZY
Contactarea
cΩ
bΩ∂
Ω
U=0
Fig. 1 Three-dimensional domain for the linear elasticity problem
Tribol Lett (2008) 30:41–52 43
123

The energy equations for the two solids p and s are given
by:
cpqpupoTox ¼ kp
o2Tox2 þ o2T
oy2 þ o2Toz2
csqsus
oTox ¼ ks
o2Tox2 þ o2T
oy2 þ o2Toz2
8<: ð4Þ
The geometrical domains of solids pand sare taken as
infinite layers with a finite thickness sufficiently large to
have a zero temperature gradient in the z-direction at the
depth d. The origin of the global coordinates system is
located at the centre of the Hertzian contact area on the
plane’s surface. The boundary conditions for the two solids
are then given by:
T xin; y; zð Þ ¼ T0; T x; y;dð Þ ¼ T0;T x; y; hþ dð Þ ¼ T0:
As for the lubricant film, neglecting the heat conduction
in the x- and y-directions and convection in the z-direction,
the energy equation is given by:
where the velocity components uf and vf are given,
according to [12], by:
uf ¼ up þ opox
R z
0z0dz0
g ge
g0ehR z
0dz0
g
h iþ ge usupð Þ
h
R z
0dz0
g
vf ¼ opoy
R z
0z0dz0
g ge
g0ehR z
0dz0
g
h i :
One should note that there are two energy sources in this
equation: compressive heating/cooling and shear heating.
In general, the shear source is more important than the
compressive one. Equation 5 requires a boundary condition
in the inlet where uf C 0 while for negative values of uf the
boundary condition is unnecessary:
T xin; y; zð Þ ¼ T0 if uf xin; y; zð Þ 0:
On the two lubricant–solid interfaces, heat flux
continuity boundary conditions must be satisfied:
k oToz
z¼0þ¼ kp
oToz
z¼0
k oToz
z¼h¼ ks
oToz
z¼hþ
(
Finally, the load balance equation is given by:ZXc
pþdX ¼ L: ð6Þ
Equation 6 is used to ensure the correct load is applied.
One shiuld note that Eq. 1 is 2-D whereas Eqs. 3–5 are
three dimensional. The domains of application of these
equations are given in the following section.
2.2 Numerical Procedure
In practice, all the above equations are solved in their non-
dimensional form. The symmetry of the problem is taken
into account, reducing thus its size to the half. The space
dimensions are non-dimensonalized with respect to the
Hertzian contact radius except for the lubricant film where
the height z is non-dimensonalized with respect to the film
thickness h. Therefore, the geometrical domain of the
lubricant film extends like both the contact area Xc and the
thermal domains for solids p and s from -4.5 B X B 1.5
and -3 B Y B 0, while its height Z [ [0,1]. The height of
solids p and s is D = d/a. The semi-infinite structure for
the linear elasticity problem should be large enough com-
pared to the contact area. This stems from the physical
reality of an EHD contact where the size of the contact is
very small compared to the size of the contacting bodies. A
size of 60 9 30 9 60 was shown to be suitable in [15].
Unstructured variable tetrahedral meshing is used for both
the EHD and thermal problems’ geometries. This allows
the use of fine meshing only where needed, leading thus to
small size systems. In fact, the EHD problem consists of a
total number of 40,000 degrees of freedom whereas for the
thermal problem the total number raises to 65,000.
Lagrange second-order elements are used for both the
elastic and thermal problems (linear elasticity and energy
equations) whereas fifth-order elements are used for the
hydrodynamic problem (Reynolds equation). For more
details about the EHD model, the reader is referred to [15].
A classical finite-element procedure is applied to Eqs. 1,
3–5. For the energy equations, a Streamline Upwind Petrov
Galerkin formulation [16] is used to stabilize the solution
for convection-dominated problems. In fact, whenever the
Peclet number Pe exceeds 1, oscillatory behaviour of the
solution is likely to occur. When convection becomes
dominant, Galerkin discretization is no longer appropriate
and gives rise to spurious oscillations in the solution. One
qc ufoT
oxþ vf
oT
oy
¼ k
o2T
oz2 T
qoqoT
uf
op
oxþ vf
op
oy
|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflzfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflCompressive heating=cooling
þ gouf
oz
2
þ ovf
oz
2" #
|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflzfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflShear heating
; ð5Þ
44 Tribol Lett (2008) 30:41–52
123

way to get rid of these oscillations is by using streamline
upwind discretizations (also known as ‘‘artificial diffusion’’
techniques). Starting with an initial value of h0 and an
initial pressure, elastic deformation, temperature and shear
stress profiles, a full-system approach is applied to Eqs. 1
and 3. In other words, they are solved simultaneously using
a Newton-Raphson resolution procedure. More details of
this method are given in [15]. Then, the three energy
equations are also solved simultaneously. An iterative
process between the pressure and temperature profiles is
repeated until both are converged, in other words, until the
maximum relative difference in either solutions between
two consecutive iterations reaches 10-3. Finally, the load
balance condition is checked. If it is verified, then the
obtained solution is the good one; otherwise, the value of
h0 is updated and the same process is repeated until the
load balance is satisfied (i.e. until the calculated load
reaches the applied one within a relative error of 10-4).
3 Results
In this section, a series of test cases under both isothermal
and thermal conditions were carried out to reveal the
importance of thermal effects on both Newtonian and non-
Newtonian lubricated contacts. The Newtonian case is
briefly discussed whereas more attention is given to the
non-Newtonian case where several results are developed
and analysed. The results are compared with experimental
data. Isothermal results are obtained using the model pre-
sented in [15].
3.1 Newtonian Lubricant
First, we shall deal with the case of a liquid with a high
Newtonian limit, owing to a low (92 kg/kmol) molecular
weight:Glycerol. This liquid is not expected to shear-thin in
the inlet region of the contact [17]. The rheological
properties and operating conditions for this fluid are given
in Table 1. The rheological properties have been derived
from refs. [18, 19] whereas the thermal properties can be
found in ref. [20]. Both viscosity and density of Glycerol
have relatively low pressure dependence. Therefore, the
simple Cheng equation [1] appears to be appropriate to
define the viscosity–pressure–temperature relationship:
l ¼ l0 exp apþ b1
T 1
T0
: ð7Þ
As for the density–pressure–temperature dependence,
the Tait equation of state [21, 22] is used. It is written for
the volume relative to the volume at ambient pressure:
V
V0
¼ 1 1
1þ K 00ln 1þ p
K0
1þ K 00
: ð8Þ
This equation provides volume variation data. The density
data is obtained by simply inverting it. The initial bulk
modulus K0 and the initial pressure rate of change of bulk
modulus K00 are assumed to vary with temperature
according to:
K0 ¼ K0R exp bKTð Þ; ð9Þ
K 00 ¼ K 00R expðb0KTÞ: ð10ÞThe volume at ambient pressure relative to the ambient
pressure volume at the reference temperature TR is
assumed to depend on temperature according to:
V0
VR
¼ 1þ aV T TRð Þ: ð11Þ
Both isothermal and thermal results were obtained for
pure rolling and rolling-sliding conditions for a contact
between a steel ball and a glass plane. For the pure rolling
case the mean entrainment velocity covers the range of 0.3
to 4.75 m/s while for the rolling-sliding conditions it keeps
a constant value of 0.38 m/s with a slide-to-roll ratio (SRR)
varying from 0 to 1.8. This case was deliberately chosen to
correspond to a lightly loaded contact (ph = 0.5 GPa) to
Table 1 Lubricant properties
and operating conditions for the
Newtonian test cases
Lubricant properties Material properties Operating conditions
l0 = 0.2803 Pa s qp = 2510 kg/m3 qs = 7850 kg/m3 T0 = TR = 313 K
a = 5.4 GPa-1 kp = 1.114 W/m K ks = 46 W/m K R = 12.7 mm
b = 7468.75 K cp = 858 J/Kg K cs = 470 J/kg K L = 30 N
q0 = 1260 kg/m3 Ep = 81 GPa Es = 210 GPa ph = 0.5 GPa
k = 0.29 W/m K tp = 0.208 ts = 0.3
c = 2400 J/kg K
K0R = 12.43 GPa
bK = 0.0035 K-1
K00R = 4.5432
b0K = 0.0018 K-1
av = 5.2 9 10-4 C-1
Tribol Lett (2008) 30:41–52 45
123

show that thermal effects are not restricted to highly loaded
contacts and high speeds and sliding velocities. These can
be observed even for lightly loaded contacts with moderate
speed conditions.
Figure 2 shows the central and minimum film thickness
curves as a function of the mean entrainment velocity
under pure rolling conditions. One should note that, in this
case, isothermal and thermal results are almost the same up
to 1 m/s. Beyond this speed, the two solutions diverge from
each other due to thermal effects which become important
at high speeds, even under pure rolling regime. Also note
the good agreement between the numerical results and
experimental data. At low speed (here, less than 1 m/s),
both isothermal and thermal results show a very good
agreement with the experimental results, while at high
speed, the isothermal results show some discrepancy with
experiments. On the other hand, thermal results are in good
agreement with experimental ones under any operating
conditions. Finally, note the change in the slope of the
thermal film thickness curves beyond the speed limit of
1 m/s. This is characteristic of the appearance of thermal
thinning.
Figure 3 shows the central and minimum film thick-
ness curves for a constant mean entrainment velocity
(Um = 0.38 m/s) as a function of the SRR. An isothermal
approach predicts a constant film thickness with respect
to the SRR. This is to be expected since the classical
Reynolds equation depends only on the mean entrainment
velocity. On the other hand, a thermal approach shows a
clear decrease in the film thickness when the SRR increa-
ses. This is because when the sliding velocity becomes
important, shear heating acts to reduce the viscosity of the
lubricant which leads to a decrease in the film thickness.
This is observed in both thermal and experimental results
which exhibit a better agreement compared to isothermal
and experimental ones.
3.2 Non-Newtonian Lubricant
For the non-Newtonian case, a lubricant which shear-thins
for the inlet conditions is used. It is formed from a
mixture of Squalane and 15 wt.% of PolyIsoPrene (PIP).
The rheology of this lubricant is much more complex than
Glycerol and requires more advanced rheological models
for an accurate determination of the changes in viscosity
and density with respect to the variations in pressure,
temperature and shear stress. The rheological properties
and operating conditions for the test cases of this lubri-
cant are given in Table 2. The rheological properties are
taken from ref. [17] whereas the thermal properties can be
found in ref. [20]. Again, the Tait equation of state is
used for density–pressure–temperature dependence. As for
the viscosity–pressure–temperature dependence, the free
volume model is used. The Doolittle equation [23] is
given by:
l ¼ lR exp BR0
V1V1R
VVR R0
V1V1R
1
1 R0
!" #; ð12Þ
where the viscosity at the reference state is lR = l(TR,
p = 0) and the relative occupied volume with respect to the
reference state is:
V1V1R
¼ 1þ e0 T TRð Þ: ð13Þ
Finally, the Carreau [13] model is used to represent the
shear-thinning behaviour of Squalane + PIP. This model
takes into account the second Newtonian plateau that
Fig. 2 Film thickness as a function of the mean entrainment velocity
for the Glycerol case under pure rolling conditions (ph = 0.5 GPa)
Fig. 3 Film thickness as a function of the SRR for the Glycerol case
with a constant mean entrainment velocity (Um = 0.38 m/s, ph =
0.5 GPa, M = 36.8 and L = 2.3)
46 Tribol Lett (2008) 30:41–52
123

occurs at very high shear rates. A modified version
provided by Bair [24] is given under the following form:
g ¼ l2 þl1 l2
1þ se
Gc
bc
1nc1
bc
: ð14Þ
where: bc ¼ exp 0:657 0:585 ln ncð Þð Þ:Equation 14 is a good approximation for the classical
Carreau law for values of n ranging from 0.3 to 0.75, which
is the range of interest in EHL applications. l1 and l2 are
allowed to vary with temperature and pressure according to
Eqs. 8–13. The high-shear limiting viscosity at ambient
pressure l2,0 is considered to be the ambient pressure
viscosity of pure Squalane and the shear-thinning of
Squalane is neglected. This could result in a viscosity
function that is slightly less shear dependent than the
measurements would predict.
Both isothermal and thermal results were obtained for
pure rolling and rolling-sliding conditions for a contact
between a steel ball and a glass plane. For the pure rolling
case the mean entrainment velocity covers the range of 1.0
to 4.65 m/s while for the rolling-sliding conditions it keeps
a constant value of 1.47 m/s with a varying SRR. Both
thermal and non-Newtonian effects on pressure, film
thickness and traction are investigated.
3.2.1 Temperature
Before discussing pressure, film thickness and traction
results, an investigation of temperature variations in the
lubricant film is considered. These are, in part, responsible
for the reduction in viscosity that leads to a decrease in
both the film thickness and the traction coefficients.
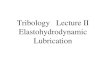
Figure 4 shows the temperature variation (DT) profiles
Table 2 Lubricant properties
and operating conditions for the
non-Newtonian test cases
Lubricant properties Material properties Operating conditions
l1,0 = l1,R = 0.0705 Pa.s av = 7.52 9 10-4 C-1 qp = 2,510 kg/m3 TR = T0 = 313 K
l2,0 = l2,R = 0.0157 Pa.s K00R = 11.29 kp = 1.114 W/m K R = 12.7 mm
Gc = 0.01 MPa b0K = 0 K-1 cp = 858 J/kg K L = 23 N
nc = 0.8 K0R = 8.375 GPa Ep = 81 GPa ph = 0.47 GPa
B = 4.2 bK = 0.006765 K-1 tp = 0.208
R0 = 0.658 q0 = 818 kg/m3 qs = 7,850 kg/m3
e0 = -9.599 9 10-4C-1 k = 0.13 W/m K ks = 46 W/m K
c = 1,700 J/kg K cs = 470 J/kg K
Es = 210 GPa
ts = 0.3
Fig. 4 Temperature profiles across the film thickness at different X locations on the central line in the x-direction for two different values of the
SRR (0.45 and 1) with Squalane + PIP used as lubricant (Um = 1.47 m/s, ph = 0.47 GPa, M = 30 and L = 7.8)
Tribol Lett (2008) 30:41–52 47
123

across the film thickness at different X locations on the
central line in the x-direction for two different values of the
SRR (0.45 and 1).
The temperature variation is more important in the case
of SRR = 1 revealing thus the higher heat generation due to
shear heating. We can also see that in the two cases, the
temperature on the plane’s surface is higher than on the
sphere’s surface. This is to be expected since the plane is
made out of glass which has much lower thermal diffusivity
(k/qc) and effusivity (ffiffiffiffiffiffiffiffikqcp
Þ than steel. So, if the two sur-
faces had the same velocity the ball’s surface is expected to
have a lower temperature because steel has a higher ability
to exchange energy with its surrounding than glass. And
since for positive values of the SRR, the surface velocity of
the ball is higher than that of the plane, and knowing that
steel has a higher volumetric heat capacity (qc) than glass,
the heat removed from the ball by convection is also more
important than for the plane. This makes the difference in
surface temperature between the two bodies even more
pronounced. Finally, note the increase in the temperature of
the lubricant as it enters the contact until it reaches its
maximum in the central area before decreasing as the
lubricant goes out of the contact. In this outlet region, we
can also see a reverse in the orientation of the temperature
variation parabola which reveals the importance of the
compressive cooling effect that occurs in this area where the
pressure gradient is negative.
Now, let us investigate the effects of these variations in
temperature along with the generalized Newtonian effect
on pressure, film thickness and traction results.
3.2.2 Pressure
First, in order to isolate the effect of the non-Newtonian
behaviour of the lubricant on the pressure profile, let us
have a look on the plot of the isothermal pressure distri-
bution along the central line in the x-direction for a
constant mean entrainment velocity of 1.47 m/s and dif-
ferent SRRs. Figure 5 shows that, globally, the pressure
distribution is not affected by the increase of sliding. The
only noticeable difference can be observed in the pressure
spike’s region. The latter loses height when the SRR is
increased. This was already observed in a previous work of
the authors [25].
The same numerical cases were run under thermal
conditions. This reveals the combined effect of temperature
and non-Newtonian behaviour of the lubricant on pressure.
And mostly, by comparison with the corresponding previ-
ous isothermal results, it allows to isolate the temperature
effects.
Figure 6 shows that when thermal effects are taken into
account, globally, the pressure exhibits a decrease in the
central contact area. Since the load balance should be
satisfied, this is generally compensated by an increase of
the pressure in the width of the contact. This was observed
in experiments by Jubault et al. [26]. It is also shown in
Fig. 7 where we can note a pressure increase in the contact
width in the y-direction with the increase of the SRR.
Concerning the pressure spike, not only does it lose
height due to shear-thinning when the SRR is increased,
but, due to thermal effects, it also gains width and moves
towards the centre of the contact. This has a direct con-
sequence on the shape of the film thickness profile
especially in the horseshoe area at the outlet of the contact.
The variations in the film thickness shape are discussed
more in detail in the following section.
3.2.3 Film Thickness
For pure rolling tests, the central and minimum film
thickness curves for isothermal, thermal and experimental
results are shown in Fig. 8. As for the Newtonian case, up
to a given velocity limit (in this case 2 m/s), isothermal and
thermal results are practically the same. Beyond this value,
the two curves diverge from each other revealing thus the
appearance of important shear heating. Finally, note the
exceptional agreement between thermal and experimental
results.
Fig. 5 Non-Newtonian effects
on pressure for the
Squalane + PIP case (Um
= 1.47 m/s, ph = 0.47 GPa,
M = 30 and L = 7.8)
48 Tribol Lett (2008) 30:41–52
123

Figure 9 shows the film thickness curves as a function of
the SRR. In addition to the central and minimum film
thicknesses, the minimum film thickness on the central line
in the x-direction curves for isothermal, thermal and
experimental approaches are shown. The film thickness
continuously decreases with the increase of the SRR for
both isothermal and thermal approaches. This decrease is
more important in the thermal case since the combined
non-Newtonian and thermal effects are superposed, and
both have a thinning effect on the film thickness. Also note,
especially in the case of central film thicknesses, the good
agreement between thermal and experimental results.
In both the thermal and experimental cases, when the
SRR is increased, the minimum film thickness on the
central line in the x-direction hcminapproaches the global
minimum film thickness hmin. Therefore, the horseshoe
shape at the outlet of the contact, which originally has large
ends and a narrow central region, gains in width on its
central part and starts having an almost constant width. The
change in shape of the horseshoe due to thermal effects was
also observed in the experiments of Jubault et al. [26]. By
examining Fig. 10, one can see in the contour plots for the
thermal cases that when the SRR grows, the horseshoe
loses width on its end parts and becomes larger on its
central part. Thus, it comes closer to having a global
constant width. This could not be observed by a simple
isothermal approach where the difference between hcminand
hmin is almost constant whatever the SRR was (see Fig. 9).
This is also observed on the isothermal contour plots in
Fig. 11 where the horseshoe has practically the same shape
for the different SRRs.
3.2.4 Traction
Figure 12 shows the isothermal, thermal and experimental
traction curves as a function of the SRR for two different
constant mean entrainment velocities of 0.74 and 1.47 m/s.
It is clear that an isothermal approach is not appropriate
for estimating friction in an EHL contact. In fact, it
Fig. 7 Combined thermal and non-Newtonian effects on the width
of the contact for the Squalane + PIP case (Um = 1.47 m/s, ph =
0.47 GPa, M = 30 and L = 7.8)
Fig. 8 Film thickness curves as a function of the mean entrainment
velocity under pure rolling conditions for the Squalane + PIP case
(ph = 0.47 GPa)
Fig. 6 Combined non-
Newtonian and thermal effects
on pressure for the
Squalane + PIP case (Um
= 1.47 m/s, ph = 0.47 GPa,
M = 30 and L = 7.8)
Tribol Lett (2008) 30:41–52 49
123

overpredicts friction coefficients whereas a thermal
approach shows a good agreement with experimental
data.
Finally, one should note that the isothermal curves
predict a higher traction coefficient for the higher mean
entrainment velocity whatever the SRR was. This does not
reflect the physical reality since the experimental points
(and the thermal curves) show that this is true only up to a
certain value of the SRR (here &0.5). Beyond this value,
the tendency is inverted and the friction coefficient for the
higher mean entrainment velocity becomes lower. This
reveals the appearance of important thermal effects at high
speed operating conditions. In this case, beyond SRR &0.5 and for Um = 1.47 m/s, the latter have more influence
on the traction coefficient than frictional shear, whereas for
Um = 0.74 m/s, frictional shear is dominant.
Fig. 9 Film thickness curves as
a function of the SRR for a
constant mean entrainment
velocity for the Squalane + PIP
case (Um = 1.47 m/s,
ph = 0.47 GPa, M = 30 and
L = 7.8)
Fig. 10 Thermal film thickness
contour plots as a function of
the SRR for the Squalane + PIP
case (Um = 1.47 m/s,
ph = 0.47 GPa, M = 30 and
L = 7.8)
Fig. 11 Isothermal film
thickness contour plots as a
function of the SRR for the
Squalane + PIP case (Um
= 1.47 m/s, ph = 0.47 GPa,
M = 30 and L = 7.8)
50 Tribol Lett (2008) 30:41–52
123

4 Conclusion
This paper presents a finite element model for TEHL of
circular contacts lubricated with either Newtonian or shear-
thinning lubricants. Some typical test cases were run under
isothermal and thermal operating regimes for both pure
rolling and rolling-sliding conditions. It is shown that
beyond a certain limit of speed operating conditions, it is
necessary to take into account shear heating for a good
estimation of film thickness and, more importantly, friction
coefficients. Shear-thinning and thermal effects are shown
to have a film-thinning effect when the sliding velocity is
increased. They also modify both pressure and film thick-
ness distributions. In fact, shear-thinning effects tend to
decrease the pressure spike’s height without any significant
change in the shape of the film thickness distribution when
the SRR is increased. As for thermal effects, not only do
they act to decrease the height of the pressure spike, but
they also provide a gain in its width and its approach
towards the centre of the contact. This leads to a change in
the film thickness profile, especially in the outlet region
where the horseshoe shape becomes wider at its central part
and less large at its ends. Thus, it has an almost constant
width compared to the isothermal shape where the horse-
shoe is large at the ends and narrow in the central region.
All the results were compared to experimental data show-
ing a better agreement between thermal results and
experiments especially at high speeds or sliding velocities.
A remarkable agreement was obtained for friction results
where the isothermal approach was shown to overestimate
the friction coefficients in the contact.
Finally, the thermal conductivity of organic liquids is
known to increase with pressure. In this work, the ambient
pressure value has been used, neglecting the pressure
dependence. This does not significantly affect the results
since only moderately loaded contacts are treated here. But,
for future works, when dealing with highly loaded contacts,
the influence could become more important and a more
complete analysis will be carried out. This is expected to
reduce the temperature increase throughout the film
thickness.
Acknowledgements The authors thank Prof. E. Ioannides (SKF
Group Technical Director) for his kind permission to publish this
work. They also wish to express their gratitude to the French Ministry
of National Education and Scientific Research for partially financing
this study.
References
1. Cheng, H.S., Sternlicht, B.: A numerical solution for the pressure,
temperature and film thickness between two infinitely long,
lubricated rolling and sliding cylinders, under heavy loads.
ASME J. Basic Eng. 87, 695–707 (1965)
2. Cheng, H.S.: A refined solution to the thermal-elastohydrody-
namic lubrication of rolling and sliding cylinders. ASLE Trans 8,
397–410 (1965)
3. Zhu, D., Wen, S.: A full numerical solution for the thermo-el-
astohydrodynamic problem in elliptical contacts. ASME J.
Tribol. 106, 246–254 (1984)
4. Kim, K.H., Sadeghi, F.: Three-dimensional temperature distri-
bution inEHD lubrication: Part I—circular contact. ASME J.
Tribol. 114, 32–41 (1992)
5. Guo, F., Yang, P., Qu, S.: On the theory of thermal elastohy-
drodynamic lubrication at high slide-roll ratios—circular glass-
steel contact solution at opposite sliding. ASME J. Tribol. 123,
816–821 (2001)
6. Liu, X., Jiang, M., Yang, P., Kaneta, M.: Non-Newtonian thermal
analyses of point EHL contacts using the eyring model. ASME J.
Tribol. 127, 70–81 (2005)
7. Kim, H.J., Ehret, P., Dowson, D., Taylor, C.M.: Thermal elas-
tohydrodynamic analysis of circular contacts, Part 1: Newtonian
model. IMechE J. Eng. Tribol. 215(J), 339–352 (2001)
8. Eyring, H.: Viscosity, plasticity and diffusion as examples of
absolute reaction rates. J. Chem. Phys. 4, 283–291 (1936)
9. Barus, C.: Isothermals, isopiestics and isometrics relative to
viscosity. Am. J. Sci. 45, 87–96 (1893)
10. Roelands, C.J.A.: Correlational Aspects of the viscosity-temper-
ature-pressure relationship of lubricating oils. PhD thesis,
Technische Hogeschool Delft, The Netherlands (1966)
11. Dowson, D., Higginson, G.R.: Elastohydrodynamic Lubrication.
The Fundamental of Roller and Gear Lubrication. Pergamon,
Oxford (1966)
12. Yang, P., Wen, S.: A generalized Reynolds equation for non-
Newtonian thermal elastohydrodynamic lubrication. ASME J.
Tribol. 112, 631–636 (1990)
13. Carreau, P.J.: Rheological equations from molecular network
theories. Trans. Soc. Rheol. 16(1), 99–127 (1972)
14. Reynolds, O.: On the theory of the lubrication and its application
to Mr Beauchamp Tower’s experiments, including an experi-
mental determination of the viscosity of olive oil. Philos. Trans.
R. Soc. 177, 157–234 (1886)
Fig. 12 Traction curves as a function of the SRR for two different
mean entrainment velocities of 0.74 m/s (M = 50 and L = 6.5) and
1.47 m/s (M = 30 and L = 7.8) for the Squalane + PIP case
(ph = 0.47 GPa)
Tribol Lett (2008) 30:41–52 51
123

15. Habchi, W., Eyheramendy, D., Vergne, P., Morales-Espejel, G.:
A full-system approach of the elastohydrodynamic line/point
contact problem. ASME J. Tribol. 130(2), (2008, to appear)
16. Brooks, A.N., Hughes, T.J.R.: Streamline-upwind/Petrov-Galer-
kin formulations for convective dominated flows with particular
emphasis on the incompressible Navier-Stokes equations. Comp.
Methods Appl. Mech. Eng. 32, 199–259 (1982)
17. Bair, S.: High-Pressure Rheology for Quantitative Elastohydro-
dynamics. Elsevier Science, Amsterdam (2007)
18. Cook, R.L., King, H.E., Herbst, C.A., Herschback, D.R.: Pressure
and temperature dependent viscosity of two glass forming liquids:
glycerol and dibutyl phthalate. J. Chem. Phys. 100(7), 5178–5189
(1994)
19. Bridgman, P.W.: The Physics of High Pressure. Dover, New
York (1970)
20. Lide, D.R.: CRC Handbook of Chemistry and Physics, 85th edn.
CRC press, Boca Raton-Florida (2004)
21. Hirschfelder, J.O., Curtiss, C.F., Bird, R.B.: Molecular Theory of
Gases and Liquids. Wiley, New York (1954)
22. Hogenboom, D.L., Webb, W., Dixon, J.D.: Viscosity of several
liquid hydrocarbons as a function of temperature, pressure and
free volume. J. Chem. Phys. 46(7), 2586–2598 (1967)
23. Doolittle, A.K.: Studies in Newtonian flow II, the dependence of
the viscosity of liquids on free-space. J. Appl. Phys. 22, 1471–
1475 (1951)
24. Bair, S.: A rough shear-thinning correction for EHD film thick-
ness. STLE Tribol. Trans. 47, 361–365 (2004)
25. Habchi, W., Demirci, I., Eyheramendy, D., Morales-Espejel, G.,
Vergne, P.: A finite element approach of thin film lubrication in
circular EHD contacts. Tribol. Int. 40, 1466–1473 (2007)
26. Jubault, I., Molimard, J., Lubrecht, A.A., Mansot, J.L., Vergne,
P.: In situ pressure and film thickness measurements in rolling/
sliding lubricated point contacts. STLE Tribol. Lett. 15(4), 421–
429 (2003)
52 Tribol Lett (2008) 30:41–52
123