Embed Size (px)
Citation preview

Thermal Fluctuations of Anisotropic Semiflexible Polymers
Sander L. Poelert, Harrie H. Weinans, and Amir A. Zadpoor∗
Department of Biomechanical Engineering, Faculty of Mechanical, Maritime and Materials Engineering,Delft University of Technology, Mekelweg 2, Delft 2628 CD, The Netherlands
(Dated: June 13, 2021)
Thermal fluctuations of microtubules (MTs) and other cytoskeletal filaments govern to a greatextent the complex rheological properties of the cytoskeleton in eukaryotic cells. In recent years,much effort has been put into capturing the dynamics of these fluctuations by means of analytical andnumerical models. These attempts have been very successful for, but also remain limited to, isotropicpolymers. To correctly interpret experimental work on (strongly) anisotropic semiflexible polymers,there is a need for a numerical modelling tool that accurately captures the dynamics of polymers withanisotropic material properties. In the current study, we present a finite element (FE) framework forsimulating the thermal dynamics of a single anisotropic semiflexible polymer. First, we demonstratethe accuracy of our framework by comparison of the simulated mean square displacement (MSD)of the end-to-end distance with analytical predictions based on the worm-like chain model. Then,we implement a transversely isotropic material model, characteristic for biopolymers such as MTs,and study the persistence length for various ratios between the longitudinal shear modulus, G12,and corresponding Young’s modulus, E1. Finally, we put our findings in context by addressinga recent experimental work on grafted transversely isotropic MTs. In that research, a simplifiedstatic mechanical model was used to deduce a very high level of MT anisotropy to explain theobservation that the persistence length of grafted MTs increases as contour length increases. Weshow, by means of our FE framework, that the anisotropic properties cannot account for the reportedlength-dependent persistence length.
I. INTRODUCTION
The characteristic thermal fluctuations of biopolymersthat are submerged in a viscous solvent have been ex-tensively studied for over a decade [1–4], mainly due totheir important role in many biological processes [5, 6].In eukaryotic cells for example, the thermal undulationsof biopolymers are essential for the functioning of the dy-namic network that these biopolymers constitute [7, 8].This network is known as the cytoskeleton and mostlyconsists of the biopolymers F-actin, intermediate fila-ments, and microtubules, which are linked together byaccessory proteins. The cytoskeleton gives the eukary-otic cell its mechanical properties, allows the cell to re-sist external stresses and plays a leading role in activeforce generation, cell mitosis and intracellular transportof vesicles and organelles [8, 9]. A good understandingof the mechanisms underlying these divergent roles ofthe cytoskeleton, requires a complete description of themechanics and thermal dynamics of all of its structuralcomponents [10, 11].
The thermal dynamics of a submerged filament is of-ten discussed in terms of its persistence length, `p. Ifthe contour length, Lc, of the polymer is much greaterthan its persistence length, the dynamics of the polymeris dominated by thermal bending (flexible limit). Con-versely, if the contour length is much smaller than thepersistence length, the polymer dynamics will be domi-nated by elastic bending (stiff limit). Many biopolymershave a contour length close to their persistence length
and are therefore called semiflexible. Formally, the per-sistence length is the characteristic length scale of the arclength for which two tangent angles along the polymer’sbackbone θ(0) and θ(s) start to become uncorrelated [5].In two-dimensions, this translates to [3]:
〈cos(θ(s)− θ(0))〉 = exp(−s/2`p) . (1)
By means of the equipartition theorem, the persistencelength can be related to the bending rigidity of the poly-mer, κ, and the external thermal energy, kBT , as [5]
`p = κ/kBT . (2)
For homogeneous isotropic filaments, κ equals the prod-uct (EI) of the Young’s modulus, E, and second mo-ment of area, I. However, the effective bending stiffnessof anisotropic polymers is nontrivial and cannot be ex-pressed in terms of individual material properties [11].
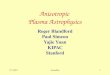
Microtubules (MTs) are among the cytoskeletalbiopolymers that have attracted particular interest dur-ing the recent years, mainly due to their key role in cell di-vision [12]. They exhibit an intrinsic anisotropic materialbehaviour [2, 3, 13]. Underlying this anisotropic materialbehaviour is their complex molecular structure: MTs arehollow tubes with an outer diameter of 25 nm that con-sist of parallel aligned protofilaments of α- and β-tubulinheterodimers (Figure 1). The longitudinal Young’s mod-ulus is determined by the strength of the head-tail αβ-αβtubulin bonds, whereas the shear modulus is determinedby the much weaker inter-protofilament bonds [14–16].All-atom computer simulations [17] and in vitro mechan-ical testing of MTs [13] report anisotropic properties withone order difference between the longitudinal Young’smodulus and corresponding shear modulus.
arX
iv:1
110.
5613
v1 [
cond
-mat
.sof
t] 2
5 O
ct 2
011

2
α tubulin
β tubulin
top viewside view
soluble αβ tubulin dimer
proto!lament
G12
FIG. 1. A schematic image of the microscopic architecture ofmicrotubules. Microtubules are straight, hollow filaments andconsist out of, on average, 13 parallel aligned protofilaments.
Mainly due to the unfathomable relationship betweenanisotropic material properties of a polymer and its per-sistence length, it has been difficult to interpret recentexperiments on grafted MTs submerged in a viscous fluid.In those experiments, a hidden dependency of the persis-tence length of grafted MTs on their contour length wasobserved [2, 18]. Based on a simple Timoshenko beammodel, that describes macroscopic elastic beams withshear contributions [19], and by assuming a static tipload and small displacements, anomalous MT materialproperties of a six orders lower longitudinal shear mod-ulus than corresponding Young’s modulus were found.Various numerical modelling studies indeed confirmedcontour length-dependency of the persistence length, butthese studies are likewise limited to static loads and smalldisplacements [20–22]. In this respect, there is a lack ofan intuitive computational modelling tool that allows forthe study of the thermal dynamics of anisotropic poly-mers under distributed thermal force application and fi-nite displacements.
Conventionally, polymers have been modelled numer-ically as a series of interconnected beads and rods orsprings. This approach has its limitations, such as thelack of careful mathematical analysis, unavoidable arti-ficial constraints and the need for (expensive) explicittime integration schemes [23]. Furthermore, bead mod-els are limited to very slender and isotropic filaments,which makes these models less suitable for modellingthe dynamics of relatively thick and anisotropic poly-mers, such as MTs. Driven by these limitations, a newmethod based on the finite element (FE) method wasrecently proposed [23]. In such an FE model, the mi-crostructural complexity of a polymer is approximated
by a continuum mechanical model, which is discretizedinto finite elements. The time-dependent partial differ-ential equations (PDE’s), resulting from the interactionbetween the polymer and its fluid environment, are solvedover each element using implicit time integration. It canbe proven mathematically that the solution of the FEmethod converges to the solution of the analytical PDEfor infinitely small elements and time steps [23]. Addi-tionally, FE modelling has already been used for manydecades in other research fields, such as computationalengineering. This has resulted in versatile user-friendlysoftware packages, allowing straightforward implemen-tation of advanced material models. Furthermore, theFE method has been shown to be up to thousand timesfaster than traditional bead-rod models based on explicittime integration schemes [23]. The sound mathemati-cal formulation, easy implementation of complex mate-rial models and favourable computational costs makesthe FE method an accurate and intuitive modelling toolfor capturing the thermal dynamics of single semiflexiblepolymers.
In the current study, we develop a finite element frame-work, based on a commercial solver (Abaqus/standard,simulia), to model semiflexible polymers in thermalequilibrium with their viscous fluid environment. We firstdemonstrate the accuracy of this technique by comparingthe simulated time evolution of the thermal fluctuationsof freely floating and hinged isotropic filaments with an-alytical predictions based on the worm-like chain (WLC)model. We then change the boundary conditions to sim-ulate a grafted MT and use the mean square of the trans-verse displacement of its tip as a measure for its persis-tence length. Again, we show good correspondence withthe theoretical predictions based on the worm-like chain(WLC) model. Finally, we implement highly anisotropicmaterial properties and study the persistence length ofMT of various lengths. We relate our findings to recentexperimental research [2].
II. METHODOLOGY
Introduction
In this section, we describe the numerical frameworkfor capturing the thermal dynamics of single anisotropicsemiflexible polymers. This numerical framework isbuilt around a commercial FE solver (Abaqus/Standard,simulia) and is largely based on the framework proposedby Cyron and Wall [23]. The finite element approachis, as argued by Cyron and Wall in [23, 24], an accu-rate, efficient and intuitive way of modelling the ther-mal dynamics of semiflexible polymers. In the currentsection, we first explain the workflow of the frameworkcentred around its three main stages (pre-processing,solving and post-processing). Then, to confirm our ap-proach, we pay particular attention to the validation ofthe framework. Based on the time evolution of the mean

3
square displacement (MSD) of the end-to-end distance ofsimulated isotropic MTs, we show good correspondencebetween simulation output and the analytical solutionbased on the WLC-model. We do this for various pa-rameters and boundary conditions. Finally, we intro-duce an anisotropic material model and adapt the vali-dated framework to address a recent experimental studyon grafted anisotropic MTs [2].
A. The finite element framework
From here on, we coarse-grain the exact atomic archi-tecture of an MT by approximating it as a hollow slendercontinuum structure, as is common practice in Browniandynamics modelling [2, 5]. Let us formulate a force equi-librium per unit length of internal and external forces towhich the slender continuum is subjected [23],
finert(u) + fint(u, u,x) = fext(x). (3)
In Eq.(3), the internal forces, fint, include bending (elas-tic) forces, fel(u,x), and damping forces, fvisc(u, u,x).Since we do not consider any deterministic externalforces, the right hand side of Eq.(3) only includes stochas-tic forces, fstoch(x). Furthermore, from dimensional anal-ysis it can be shown that on the scale of a polymericsystem the inertial forces are negligable compared to theinternal friction, elastic and stochastic forces [25]. There-fore, from here on we will not explicitly write the inertiaforce term. We thus rewrite Eq.(3) as [23]
fel(u,x) + fvisc(u, u,x) = fstoch(x). (4)
Eq.(4) is a nonlinear partial differential equation thatcannot be solved analytically. We therefore resort to FEmodelling for finding a solution for the displacement vec-tor, u. In order to efficiently perform the simulations,a modelling framework was built around a commercialFE solver (Abaqus/Standard, SIMULIA), based on aFortran user-subroutine, MATLAB and Python-scripting(Table I).
TABLE I. Overview of the software that was used in the finiteelement framework
Software Version Manufacturer Function
Python 2.6.2 Beopen.com pre/post-processorAbaqus/Standard 6.10-1 SIMULIA solver
Fortran 11 Intel solverMATLAB R2011a Mathworks post-processor
1. Pre-processing
Let us consider a polymer confined to movement inthe x-y plane (2-D). At tsim = 0, the backbone of the
�nite-element idealization
x(1)
y(2)
microtubule
FIG. 2. Initially the filament is aligned with the x-axis. Move-ment is confined to the x-y plane and the biopolymer (top) isdiscretized into a one-dimensional model of 20 elements (bot-tom).
polymer is aligned with the x-axis, which can be consid-ered the stress-free or reference configuration [26]. Thecontour length of the polymer, Lc, is a variable param-eter and is specified by the user for each ensemble. Thepolymer is then discretised into 20 elements of lengthle = Lc/20 (Figure 2). Cyron and Wall (2009) showed al-ready excellent results for discretization into 20 elementsto capture the thermal dynamics of semiflexible poly-mers of similar properties as in the current study, andonly minor improvements were reported a for more accu-rate discretization [23]. For discretization we used one-dimensional Timoshenko beam elements. This specifictype of elements was chosen due to their ability to accu-rately describe shearing, even for relatively thick beamsand low shear modulus [27] and their favourable compu-tational efficiency [26]. Additionally, several studies haveshown that one-dimensional Timoshenko beam elementscan accurately capture microtubule mechanics and arepreferable over orthotropic shell models [28, 29]. Thecross section of the filament is dependent on the type ofpolymer that is simulated and is presumed fixed through-out different ensembles [30]. Since we simulated MTs,which are of tubular shape, we assumed a hollow circularshaped cross-section, of which the dimensions are given inTable II. We used one-dimensional continuum elements,thus the MT cross-section is only implicitly reflected bythe second moment of area, I [26]:
I = πr4o − r4
i
4, (5)
where ro is the outer radius and ri is the inner radius ofthe polymer. First, for validation of the FE framework,we implemented an isotropic material model by settingthe shear modulus to Giso
12 = E1/2(1 + ν). See Table IIfor a listed overview of all the geometric and materialproperties that are used in this study.
Stochastic forces are applied on each individual nodeof the discretized polymer by means of a user-defined dis-tributed load subroutine (DLOAD). At the beginning ofeach simulation time step ∆tFE the DLOAD subroutine iscalled, upon which it outputs an array of random forces.These discrete forces are the equivalent of the noise corre-lations, fixed through the fluctuation-dissipation theorem

4
TABLE II. Values that were used for validation of the mod-elling framework
Parameter Value Ref
Outer radius ro 1.25 × 10−2 µm [5]Inner radius ri 7.5 × 10−3 µm [5]
Poisson’s ratio ν 0.3 [31]Density ρ 1.0 × 109 mg µm−3 [31]
Young’s modulus E 1.3 × 109 pN µm−2 [32]
Fluid viscocity η 1 × 10−3 pN s µm−2 [5]
Thermal energy kBT 4.045 × 10−3 pN µm [24]
[23, 25], that determine the continuous stochastic forcedensity fstoch. These random nodal forces are sampledfrom a Gaussian distribution, which is defined by its firstand second moments,
µ = 0
σ2 = 2 2kBTζ∆tstochLe
,(6)
respectively, where we introduced the thermal energy ofthe solvent, kBT , the drag-coefficient, ζ, and the variable∆tstoch, which represents the ‘refresh rate’ of the stochas-tic forces. The FE simulation step size, ∆tFE, has to besmaller than ∆tstoch in order to obtain proper FE con-vergence. In the current framework, we have consistentlyused a FE step size ∆tFE ≤ (0.1∆tstoch).
Similar to earlier work [23], we estimated the homoge-neous isotropic drag coefficient, ζ, according to the for-mula for a rigid cylinder in a homogeneous flow [25] as,
ζ = 4πη/ ln(Lc/d) , (7)
where η is the fluid viscosity and d is the diameter of thefilament [26]. The logarithmic term is a correction factorthat compensates for the neglect of hydrodynamic inter-actions between distant segments of the polymer [25, 33].Although it has been demonstrated that contributionsfrom internal friction cause a sharp increase in ζ for veryshort MTs, ζ may be presumed to obey Eq.(7) in therange of Lc considered in the current study [18]. Wemodelled damping according to the Rayleigh dampingmodel:
C(e) = αM(e) + βK(e), (8)
where C(e) is the elements damping matrix, M(e) is theelements mass matrix and K(e) is the elements stiffnessmatrix. In our particular case of linear Timoshenko beamelements, we set α = ζ/ρ A, where ρ is the density of theMT and A is the cross-sectional area, and β = 0.
2. Solving
Each realization was solved by the Abaqus/StandardFE solver on a Dell Precision T7500 workstation (Xeon
X5680, two CPUs @ 3.33 GHz). The Abaqus/StandardFE solver is based on an efficient implicit time integrationscheme, which makes it suitable for low-speed dynamicevents, such as thermal undulations of polymers. Thehandling of the realizations (automatically starting thesolver and collecting the data afterwards) is performedby a Python script.
For solving the model, we introduced two differenttimeframes: the simulation time frame, tsim, and the datacollection time frame tcoll. At tsim = 0, the simulationis initiated and the initially straight contour of the fila-ment starts to show bending fluctuations. To ensure thatdata collection is started after the polymer has reachedequilibrium with its environment, we began data collec-tion after the largest relaxation time of the polymer, τc,elapsed, at which instant we set tcoll (Figure 4). Thislargest relaxation time of the polymer is determined by[3, 5]
τc =ζ
κisoq∗1−4 =
ζ
EIq∗1−4, (9)
where the wave vector of the first bending mode q∗1 inEq.(9) depends on the imposed boundary conditions. Forexample, for hinged boundary conditions q∗1 = 1.5π/L c[34] and for free boundary conditions q∗1 = π/L c [5] (Fig-ure 3).
x(1)
y(2)
FIG. 3. Two sets of boundary conditions have been used forvalidation: a freely floating polymer (top) and a polymer withhinged ends (bottom).
tsim
= 0
τc
τc /102
time:
stepsize: ∆tFE
=τc/103
τc /101 30 τ
c
∆tFE
=τc/105 ∆t
FE=τ
c/103
∆tFE
=τc/104
tcoll
= 0 tcoll
= tend
FIG. 4. A schematic depiction of the simulation timeline in-cluding the simulation time frame and collection time frame.The step size is adaptive: after relaxation is performed witha coarse step, the framework switches to a much smaller stepsize, which is then gradually increased.
For various purposes, the dynamics need to be well de-scribed at very small timescales (t << τc) as well as verylarge timescales (t >> τc) (e.g. for plotting the MSD ofthe end-to-end distance). In order to optimize the reso-lution for all timescales, variable time stepping is imple-mented: the time step that is used, depends on τc and

5
the advancement of the realization. The procedure is asfollows: first, the relaxation time is calculated based onthe input parameters, Eq.(9). A coarse time steppingresolution is used to let the polymer equilibrate with itsfluid environment (0 < t < τc). Once the equilibriumhas been obtained, the FE solver switches to the high-est resolution and accurately captures the dynamics atthe smallest timescale. The time resolution is graduallydecreased, every decade of timescale, up to the largesttime step that still allows for proper convergence of therealization (Figure 4).
In the current FE framework, the computational costof the simulation is, due to the variable time stepping,to a great extent independent of the relaxation time.Therefore, the computational effort is largely indepen-dent of the contour length of the polymer, the boundaryconditions, the drag coefficient and the bending rigidity.However, for very large relaxation times or very low poly-mer rigidity the gain of variable time stepping is limited,due to a limit to the maximum step size that still allowsfor proper FE convergence. As an indication, a typi-cal realization (30τc of simulated time) of an isotropicpolymer lasted ± 45 minutes on the specified computersystem. For high levels of anisotropy or very long relax-ation times, the duration of a realization could take upto 4 hours.
The realizations within each ensemble are independentof each other (due to the ergodic nature of the studiedphenomena). Therefore, simulations can be parallelized,reducing the overall simulation time.
3. Post-processing
The solver outputs data files that contain a global timestamp of each step ∆tFE and the corresponding positionsof the first and last nodes of the polymer.
In order to quantify the time evolution of the poly-mer fluctuations, we define the mean square displacement(MSD) of the end-to-end distance as
⟨δR2(tcoll)
⟩≡⟨
[R(tcoll)−R(tcoll = 0)]2⟩, (10)
where R (tcoll) is the end-to-end distance or projectedlength of the filament (Figure 5). As can be seen fromEq.(10), the MSD of the end-to-end distance is zero iftcoll = 0 and gradually increases with time. The end-to-end distance is determined by subtracting the positionvector of the last node and the position vector of thefirst node of the polymer. This procedure is performedfor all time steps ∆tFE. The end-to-end distance at theof the collection R(tcoll = 0) is subtracted from the totalend-to-end distance and the resulting values are squaredto obtain the displacement of the end-to-end distanceδR2(tcoll). We then average over all NR realizations inthe ensemble to obtain the MSD of the end-to-end dis-tance
⟨δR2(tcoll)
⟩.
end-to-end distance
FIG. 5. For the MSD of the end-to-end distance, that wasused as observable in this framework, we collect the coordi-nates of the first and last node. For tcoll = 0
⟨δR2(tcoll)
⟩is
set to zero and increases as time evolves.
B. Validation results
For validation purposes, two sets of boundary condi-tions have been considered: a freely floating polymer anda polymer with hinged ends (Figure 3). In case of hinged-hinged boundary conditions, the end-nodes of the poly-mer are allowed to move along the x-axis, but are con-strained to move along the y-direction.
According to the theory of the Brownian dynamics ofpolymers [34–36] two regimes can be identified in thetime evolution of the mean square end-to-end distance:for very small times t << τc [37],
⟨δR2(t)
⟩increases,
obeying a power law that scales with t3/4 , whereasfor t >> τc,
⟨δR2(t)
⟩reaches a universal equilibrium
value of⟨δR2(t)
⟩eq
= Lc4/90`2p [38]. We rescaled the
simulated⟨δR2(t)
⟩and analytical solution by defining
F (t) =⟨δR2(t)
⟩ (90`2p/Lc
4)
and we rescaled time by
defining t = t/τc. For both boundary conditions (freeand hinged) and contour lengths (10 µm and 20 µm) agood agreement with the theoretical predictions of theWLC model [34, 36] is observed for over 5 decades oftimescale. The jagged shape of the simulated curves isdue to the random nature of the observed phenomenonand is expected to die out completely for a higher numberof realizations, as shown in a similar research [23]. It isnot the goal of this particular study to show convergenceof the finite element towards the analytical solution fora large number of realizations (this has been done beforein [23] for NR = 4000). For the purpose of the cur-rent investigation, namely validation of the framework,NR = ±50 realizations per ensemble was considered suf-ficient to show a good correspondence with the WLCtheory.
C. Anisotropic polymers
For the validation of the framework we presumedisotropic material properties. However, due to theiratomic architecture (Figure 1), MTs are known to beanisotropic: the longitudinal Young’s modulus is deter-mined by the strength of the head-tail αβ − αβ tubulinbonds, whereas the shear modulus is determined by themuch weaker inter-protofilament bonds [14–16]. Further-more, in the plane of the transverse cross-section, MTsgive an isotropic response to stress. From here on, weintroduce a transversely isotropic material model, which

6
10−4
10−2
100
102
10−4
10−2
100
Free BC, length = 10µm
Time/τc
F(t)
a)
analytical
numerical
10−4
10−2
100
102
10−4
10−2
100
Hinged BC, length = 20µm
Time/τc
F(t)
b)
analytical
numerical
FIG. 6. Rescaled MSD of the end-to-end distance, F (t) =⟨δR2(tcoll)
⟩ (90`2p/Lc
4), as a function of rescaled time t/τc.
The plots show the F (t) for various combinations of boundaryconditions and contour lengths [(a) BC: free, Lc = 10 µm, (b)BC: hinged, Lc = 20 µm].
accounts for the anisotropic material behaviour along thebackbone of the MTs and isotropic properties along theircross-section. This approach is similar to other studieson MTs [2, 28]. According to linear elasticity theory, theelastic compliance matrix of a transversely isotropic ma-terial is defined by the Young’s moduli in the plane ofisotropy, E2 = E3 = Ep, the transverse Young’s modulusE1 = Et , the Poisson ratio’s νp, νpt , νtp and the in-plane and transverse shear moduli, G13 = G23 = Gp andG12 = Gt, respectively. Therefore, the 3-D stress-strainlaw reduces to:ε11
ε22
ε33
=
1/Et −νtp/Et −νtp/Et−νpt/Ep 1/Ep −νp/Ep−νpt/Ep −νp/Et 1/Ep
σ11
σ22
σ33
(11)
γ12
γ13
γ23
=
1/Gt 0 00 1/Gt 00 0 1/Gp
σ12
σ13
σ23
(12)
Because of the 2-D confinement of the simulation, deflec-tion of the filament is only determined by the longitudi-nal elastic modulus, E1, and longitudinal shear modulus,G12. Therefore, we introduced the transverse isotropythrough the parameter, χ, which sets the order of theratio between the longitudinal shear modulus and corre-sponding Young’s modulus,
E1
G12= 10χ. (13)
To conform our research as much as possible to the exper-imental work that has been done on grafted microtubules[2], we clamped the left-end of the MT by applying con-straints in all three degrees of freedom (2 lateral, 1 rota-tional), whereas we left the right-end unconstrained (Fig-ure 7). This new set of boundary conditions changes thelongest wave vector, which is now given by q∗1 = 1.875/Lc[39]. Substitution of this wave vector in Eq.(9) gives usfor an isotropic grafted polymer a relaxation time of
τ isoc =
ζ
EI
(Lc
1.875
)4
. (14)
For anisotropic polymers with a low shear modulus, it isexpected that the effective bending rigidity decreases andthus the relaxation time increases. To estimate the effec-tive relaxation time of an anisotropic polymer, τ eff
c , westudied the MSD of the end-to-end distance,
⟨δR2(tcoll)
⟩,
for each unique set of parameters. Based on the onsetof the
⟨δR2(tcoll)
⟩plateau we estimated τ eff
c . For sub-sequent simulations, data was only collected after thiseffective relaxation time plus an additional safety mar-gin elapsed. We then considered for each ensemble theposition of the grafted MT tip in the x-y plane which wesampled at an interval of τ eff
c /103. This allowed for ac-curate measurement of the distribution function P (x, y)and transverse displacement y⊥of the tip position (Fig-ure 7). Then, by integrating the probability distributionfunction over the y-axis, we found the asymmetric prob-ability density function along the x-axis P (x).
x(1)
y(2)y
FIG. 7. Schematic drawing of the studied microtubule: theleft-end is constrained in all degrees of freedom, whereas theright-end remains unconstrained. The mean square of thetransverse displacement of the tip, y⊥, is used as a measurefor the persistence length.
For semiflexible polymers in the stiff limit (Lc <`p), this asymmetric distribution is peaked toward full

7
stretching and has a typical width of [40]:
L‖ = L2/`p. (15)
Similarly, by integration along the x-axis, we obtainedthe distribution function P (y), which is a Gaussian dis-tribution centred at y = 0, the variance of which is givenby the mean square transverse displacement
⟨y2⊥⟩
[40].
This mean square transverse displacement⟨y2⊥⟩
can bedirectly related to the persistence length of the polymer,according to [5, 40, 41]:
`p =L3c
3 〈y2⊥〉. (16)
For each realization that is added to the ensemble, themean square transverse displacement, and thus the per-sistence length, changes. The ensemble was consideredto contain enough realizations for a reliable estimate ofthe persistence length, if for each consecutive addition ofthe last five realization to the ensemble the mean squaretransverse displacement did not change by more than 3%.
III. RESULTS
First, to affirm our approach, we sampled the tipof grafted isotropic MTs of various lengths and calcu-lated the simulated persistence length using Eq.(16). Wefound a good agreement with the theoretical persistencelength (`p = EI/kBT = 6.3 mm). As an illustration,Figure 8 shows the tip position of an isotropic MT ofcontour length Lc = 10 µm in the x-y plane, based on1.8 × 106 samples. By integration along the y-axis, wefind the characteristic non-Gaussian and asymmetric dis-tribution function P (x) with a width of L‖ = 0.015 µm,as predicted by Eq.(15) according to the WLC theory[31]. Similarly, integration along the x-axis results inthe Gaussian distribution P (y), for which a good agree-ment is observed with the WLC theory (Figure 8). In-deed, we find a mean square transverse displacement of⟨y2⊥⟩
= 0.0550 µm, which is within 4% accuracy of the
theoretical value of⟨y2⊥⟩
= 0.0529.We calculated the effective persistence length for MTs
of various contour lengths and orders of anisotropy bymeans of Eq.(16). These results are presented in Figure 9.We find that with increasing orders of transverse isotropy(χ = 1, 2, 3) the persistence length decreases for all con-tour lengths. In this range of anisotropy, short MTs seemto be less affected by a lower longitudinal shear modulusthan long MTs. For highly anisotropic MTs (χ = 6),we see a drop in persistence length of two orders com-pared to their isotropic counterpart. Although changesin persistence length with contour length are seen forall values of χ, this dependency is monotonic only forχ = 6. For this value, a gentle, but noticeable, increaseof the persistence length with increasing contour lengthis observed. In Figure 10, the contour length-dependencyof the persistence length of MTs with the highest level
−1.5 −1 −0.5 0 0.5 1 1.50
5
10
15x 10
4 P(y)
y [µm]counts
c) FE sim.
analyt.
9.96 9.97 9.98 9.99 100
2
4
6
x 105 P(x)
b)
x [µm]
counts
−0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8
9.97
9.98
9.99
10
P(x,y)
y [µm]
x [
µm
]
a)
FIG. 8. a) Point cloud of sampled tip position, based on1.8 × 106 samples. b and c) After integration along the y andx-axis we find the two characteristic distributions P (x) andP (y), respectively. c) The solid line shows the analytical pre-diction according to the worm-like chain model.
of anisotropy (χ = 6) of the FE simulations is comparedto the simplified cantilever beam model, based on theTimoshenko beam formalism and single static tip load,as used in other studies [2, 18].
IV. DISCUSSION
Certain biopolymers, such as MTs, display ananisotropic material response, which is inherent to theirmolecular structure [3, 5]. Unfortunately, the effectivepersistence length of such anisotropic filaments cannotbe explicitly expressed in terms of their material prop-erties. Additionally, the anisotropic material propertiesand relative thickness of MTs cannot be accurately im-plemented in conventional numerical and analytical mod-els, since such models are inherently built on slender-ness and isotropy approximations. Therefore, researchershave been compelled to simple static models to interprettheir experimental observations. For example, based onsuch a static model, unexplained length-dependency ofthe persistence length has been related to anomalouslyhigh levels of anisotropy [2]. However, the validity ofsuch static models, which are based on small angle ap-proximations and a single deterministic tip force, maybe questionable when describing the finite displacements

8
5 10 15 20
102
103
104
contour length [µm]
persistence
length
[µm]
χ = 1
χ = 2
χ = 3
χ = 6
FIG. 9. Persistence length versus contour length for variouslevels of anisotropy. The parameter χ refers to the order ofdifference between longitudinal shear modulus and Young’smodulus, see Eq.(13).
0 5 10 15 20 250
500
1000
1500
2000
2500
3000
3500
4000
contour length [µm]
persistencelength
[µm]
Timoshenko-beam theory, static loadFE simulation, dynamic load
FIG. 10. Persistence length versus contour length for MTswith a six-order lower longitudinal shear modulus than cor-responding Young’s modulus according to the static Tim-oshenko beam model [2, 18] with single tip force (dashed)and dynamic FE simulations with distributed random forces(solid).
that are typically observed for highly anisotropic fila-ments under distributed random forces. To overcomethese limitations we developed and validated a frame-work, based on the FE method set out by Cyron and Wallin [23]. This FE framework accounts for the interaction
between semiflexible polymers and solvent molecules byrandom force generation and application. The FE modelalso allows for the implementation of advanced mate-rial models and nonlinear elasticity. Additionally, thedeveloped framework is computationally efficient com-pared to conventionally used bead models. By apply-ing the FE framework to isotropic MTs of various con-tour lengths, we found that the time evolution of thermalfluctuations is in good agreement with the predictions ofthe WLC model [34, 36]. Furthermore, the FE frame-work allowed us to implement various levels of mate-rial anisotropy. By studying the distribution function ofthe tip of grafted isotropic and anisotropic MTs, we cal-culated the persistence length for four different contourlengths, (Lc = 5, 10, 15, 20 µm). For isotropic MTs witha contour length of Lc = 10 µm, we found a good corre-spondence with theoretical predictions and other MonteCarlo studies [40].
Three trends were identified from the simulation re-sults. First, the implementation of a transverselyisotropic material model with a lower longitudinal shearmodulus than corresponding Young’s modulus, resultsin a decrease of the persistence length for all contourlengths. Second, for the first three orders of transverseisotropy (χ = 1, 2, 3), this reduction in persistence lengthis greater for long MTs than for short MTs. Third, imple-menting the highest order of transverse isotropy (χ = 6)yields a two order decrease in persistence length, as com-pared to the isotropic case. Additionally, for χ = 6, aslight increase of the persistence length with increasingcontour length is observed.
The two orders lower persistence length of highlyanisotropic MTs (χ = 6) is of the same order as thepersistence length reported in experimental studies forshort and very short MTs [2, 42]. These experimen-tal results have been explained by considering MTs asweakly-coupled (at intermediate length scales [18]) or de-coupled (at short length scales [42]) assemblies of protofil-aments. We can thus confirm that accounting for inter-protofilament decoupling by lowering the longitudinalshear modulus indeed results in such short persistencelengths. However, the above-mentioned experiments alsoconfirmed a significantly longer persistence length of 4−8mm for long MTs of Lc = 20 − 40 mm, as also estab-lished in earlier studies, e.g. [3]. Such a striking in-crease in persistence length has been attributed to thepresumption that, in this length regime, MTs behaveas fully coupled homogenous structures with negligibleinter-protofilament sliding. From our simulation results,we conclude that a six order difference in longitudinalshear modulus and corresponding Young’s modulus alonecannot account for this reported length-dependence ofthe persistence length. Our findings agree well with pre-vious research on MT rigidity, based on experimentallymeasurement of buckling force [33, 34] and mode decom-position of free-floating MTs [3], in which no significantlength-dependency of flexural rigidity was reported. Fur-thermore, the outcomes of the current study reveal the

9
limitations of the simplified mechanical cantilever modelthat was used in other studies [2, 18] to interpret theobserved length-dependency. Such a static Timoshenkobeam model is based on small angel approximations anda single tip load. Therefore, it is unsuitable for accu-rately capturing the intricate dynamics and large dis-placements of a highly anisotropic MTs in equilibriumwith their fluid environment. The current research shedsnew light on the unexplained discrepancy between theindirectly deduced longitudinal shear modulus (six orderdifference with corresponding Young’s modulus), basedon such a simplified mechanical model, and direct exper-imental and computational measurements of the longitu-dinal shear modulus [13, 17] (up to three orders differencewith corresponding Young’s modulus). The outcomes ofthe current study should be interpreted as an encour-agement to consider other causes for the experimentallyobserved length-dependence than high anisotropy alone.
The current study is subject to several limitations.A first limitation is that internal friction due to liquidflowing through narrow pores of the MT, as pointedout in [18], was neglected. Including internal frictionwould have caused a sharp peak in the drag coefficientfor very short MTs. However, in the range of contourlengths considered in the current study, the drag coeffi-cient may be presumed constant [18]. A second limitationof the current study is that we approximated friction byan isotropic friction model. Although an isotropic fric-tion model serves as a good first approximation, [23] ananisotropic friction model, that takes into account differ-ent friction coefficients perpendicular and longitudinal to
the filament, enhances the accuracy of the absolute val-ues of the model, see [24]. Additionally, we only implic-itly accounted for the hydrodynamic interactions betweendistant polymer sections through scaling of the drag coef-ficient by a logarithmic length-dependent correction fac-tor. Indeed, we noticed small differences in the amplitudeof the saturation plateau of the MSD of the end-to-enddistance upon changing the drag coefficient correctionfactor. Such an approximation is common practice forstiff polymers, because for such stiff polymers remote in-teractions, such as one segment shielding another seg-ment, will be negligible [43, 44]. However, for long andflexible polymers, hydrodynamic interaction between seg-ments as well as self-avoidance may become appreciableand should be taken into account. In the current re-search the most flexible polymer (Lc = 20 µm, χ = 6),
was still in the stiff regime,`pLc
< 0.1. Therefore, it isexpected that neglecting hydrodynamic interaction andself-avoidance will only have had a minor effect on thesimulated values and a negligible effect on the observedtrends [40]. Finally, due to high computational costs, thenumber of realizations that were performed per ensemblewas limited. A higher number of realizations would havefurther improved the accuracy.
Despite the above mentioned limitations, the accuracyof the model exceeds largely the required accuracy tosupport our main finding: a high anisotropy cannot ac-count for the large length-dependence of the persistencelength.
[1] C. P. Brangwynne, G. H. Koenderink, E. Barry, Z. Dogic,F. C. MacKintosh, and D. A. Weitz, Biophysical Journal93, 346 (2007).
[2] F. Pampaloni, G. Lattanzi, A. Jon, T. Surrey, E. Frey,and E. Florin, Proceedings of the National Academy ofSciences 103, 10248 (2006).
[3] F. Gittes, B. Mickey, J. Nettleton, and J. Howard, TheJournal of cell biology 120, 923 (1993).
[4] R. Everaers, F. Jlicher, A. Ajdari, and A. Maggs, Phys-ical Review Letters 82, 3717 (1999).
[5] J. Howard, Mechanics of motor proteins and the cy-toskeleton (Sinauer Associates, Publishers, Sunderland,Mass., 2001) pp. xvi, 367 p.–.
[6] J. Scholey, I. Brust-Mascher, and A. Mogilner, Nature422, 746 (2003).
[7] K. Franze and J. Guck, Reports on Progress in Physics73, 094601 (2010).
[8] H. Hatami-Marbini and M. Mofrad, Cellular andBiomolecular Mechanics and Mechanobiology 4, 3(2011).
[9] D. Fletcher and R. Mullins, Nature 463, 485 (2010).[10] A. Bausch and K. Kroy, Nature Physics 2, 231 (2006).[11] M. Gardel, K. Kasza, C. Brangwynne, J. Liu, and
D. Weitz, Methods in cell biology 89, 487 (2008).[12] L. Jordan, M.A. Wilson, Nature Reviews Cancer 4, 253
(2004).
[13] A. Kis, S. Kasas, B. Babicacute, A. J. Kulik, Beno, icirc,W. t, G. A. D. Briggs, Sch, ouml, C. nenberger, S. Cat-sicas, Forr, oacute, and L., Physical Review Letters 89,248101 (2002).
[14] P. de Pablo, I. Schaap, F. MacKintosh, and C. Schmidt,Physical Review Letters 91, 98101 (2003).
[15] I. Schaap, P. de Pablo, and C. Schmidt, European Bio-physics Journal 33, 462 (2004).
[16] D. Sept, N. Baker, and J. McCammon, Protein science12, 2257 (2003).
[17] D. Sept and F. MacKintosh, Physical Review Letters104, 18101 (2010).
[18] K. M. Taute, F. Pampaloni, E. Frey, and E.-L. Florin,Physical Review Letters 100, 028102 (2008).
[19] J. M. Gere and S. Timoshenko, Mechanics of materials(PWS Pub Co., Boston, 1997) pp. xvi, 912 p.–.
[20] L. An and Y. Gao, Conf. Ser.: Mater. Sci. Eng. 10,012181 (2010).
[21] S. Kasas, C. Cibert, A. Kis, P. De Los Rios, B. Riederer,L. Forro, G. Dietler, and S. Catsicas, Biology of the Cell96, 697 (2004).
[22] C. Li, C. Ru, and A. Mioduchowski, Biochemical andbiophysical research communications 349, 1145 (2006).
[23] C. J. Cyron and W. A. Wall, Physical Review E 80,(2009).
[24] C. Cyron and W. Wall, Physical Review E 82, 66705

10
(2010).[25] M. Doi and S. Edwards, The theory of polymer dynamics
(Oxford University Press, New York, 1998) pp. –.[26] S. L. Poelert, Capturing thermal fluctuations of polymers:
a literature survey, Master’s thesis, Delft University ofTechnology (2011).
[27] X. Wei, Y. Liu, Q. Chen, M. Wang, and L. Peng, Ad-vanced Functional Materials 18, 1555 (2008).
[28] Y. Shi, W. Guo, and C. Ru, Physica E: Low-dimensionalSystems and Nanostructures 41, 213 (2008).
[29] B. Gu, Y. Mai, and C. Ru, Acta Mechanica 207, 195(2009), 10.1007/s00707-008-0121-8.
[30] In many cases, we will be interested in an ensemble ofsimulations with equal parameters. From now on, we willcall the run of a single simulation a realization and theset of realizations with identical parameters an ensemble.
[31] Y. M. Sirenko, M. A. Stroscio, and K. W. Kim, PhysicalReview E 53, 1003 (1996).
[32] C. Wang, C. Ru, and A. Mioduchowski, Physical ReviewE 74, 052901 (2006).
[33] P. Chandran and M. Mofrad, Physical Review E 79,011906 (2009).
[34] O. Hallatschek, Shaker Verslag, Ph.D. thesis, Aachen(2004).
[35] L. Le Goff, O. Hallatschek, E. Frey, and F. Amblard,Physical Review Letters 89, 258101 (2002).
[36] R. Granek, Journal de Physique II 7, 1761 (1997).[37] For the sake of clarity, from here on we omit the time-
frame specifier subscript coll, thus from here on t ≡ tcoll.[38] F. C. MacKintosh, J. Kas, and P. A. Janmey, Phys. Rev.
Lett. 75, 4425 (1995).[39] C. Wiggins, D. Riveline, A. Ott, and R. Goldstein, Bio-
physical Journal 74, 1043 (1998).[40] G. Lattanzi, T. Munk, and E. Frey, Physical Review E
69, 021801 (2004).[41] P. J. Keller, F. Pampaloni, G. Lattanzi, and E. H.
Stelzer, Biophysical Journal 95, 1474 (2008).[42] M. Van den Heuvel, M. de Graaff, and C. Dekker, Pro-
ceedings of the National Academy of Sciences 105, 7941(2008).
[43] P. Underhill, P.T. Doyle, Journal of Rheology 50 (2006).[44] R. Cox, Journal of Fluid Mechanics 44, 791 (1970).[45] J. Wang and H. Gao, The Journal of Chemical Physics
123, 084906 (2005).[46] G. Nam, A. Johner, and N. Lee, The Journal of Chemical
Physics 133, 044908 (2010).[47] P. Dimitrakopoulos, Physical Review Letters 93, 217801
(2004).[48] B. Obermayer, W. Mbius, O. Hallatschek, E. Frey, and
K. Kroy, Physical Review E 79, 021804 (2009).[49] G. Nam and N. Lee, The Journal of Chemical Physics
126, 164902 (2007).