Embed Size (px)
Citation preview
Thiết kế, mô phỏng cấu trúc đầu phun mực thông
minh
Hoàng Cường
Trường Đại học Công nghệ
Chuyên ngành: Kỹ thuật điện tử; Mã số: 60 52 70
Cán bộ hướng dẫn khoa học: PGS, TS Chử Đức Trình
Năm bảo vệ: 2012
Abstract. Khái niệm vật lý cơ bản: đưa ra những khái niệm cơ bản áp dụng trong bài toán mô
phỏng hệ cảm biến giọt chất lỏng trong ống. Bài toán điều khiển kích cỡ giọt chất lỏng trong ống
phun: Trình bày ý tưởng về bài toán điều khiển giọt chất lỏng trong ống phun. Mô phỏng bài
toán với Comsol Multiphysics: Xây dựng mô hình mô phỏng và quá trình thực hiện.
Keywords: Cơ học chất lỏng; Đầu phun mực; Ap điện; Sóng âm; Máy in phun
Content.
MỞ ĐẦU
MEMS (Microelectromechanical systems) là các hệ thống điện tử có thể có thêm các bộ phận chuyển
động có kích thước cỡ micromet. Công nghệ MEMS ra đời mở ra một cuộc cách mạng về chế tạo, hứa
hẹn thay thế các sản phẩm bằng việc kết hợp nhiều thành phần trên một chip duy nhất, tạo nên các hệ
thống trên một chip,điều này cho phép thiết kế các sản phẩm thông minh, hiệu suất cao, tin cậy và giá
thành hạ.
Công nghệ này cho phép ngành công nghệ vi chế tạo có thể sản xuất ra các thiết bị với kích thước nhỏ
hơn, và có ứng dụng lớn trong các ngành khác như công nghệ điều khiển, chế tạo robot, và hơn cả là
các ứng dụng trong công nghệ sinh học.
Hiện nay, trên thế giới vẫn đang phát triển ngành công nghiệp này. Một hướng nghiên cứu tiêu điểm là
xác định và điều khiển kích cỡ giọt chất lỏng phun qua một ống phun, với các ứng dụng trong ngành
chế tạo máy in phun và công nghệ sinh học. Xuất phát từ nhu cầu đó, luận văn hướng đến việc thiết kế
mô hình cảm biến giọt chất lỏng trong ống phun, và mô phỏng toàn quá trình cảm biến của mô hình
trên máy tính.
Nội dung của đề tài gồm 4 chương:
Chương 1 Khái niệm vật lý cơ bản: đưa ra những khái niệm cơ bản áp dụng trong bài toán mô phỏng
hệ cảm biến giọt chất lỏng trong ống.
Chương 2 Bài toán điều khiển kích cỡ giọt chất lỏng trong ống phun: Trình bày ý tưởng về bài toán
điều khiển giọt chất lỏng trong ống phun.
Chương 3 Mô phỏng bài toán với Comsol Multiphysics: Xây dựng mô hình mô phỏng và quá trình
thực hiện.
Chương 4 Kết luận.
KHÁI NIỆM VẬT LÝ CƠ BẢN
1.1 Lý thuyết sóng
1.1.1 Sóng cơ
- Sóng cơ là dao động cơ lan truyền trong một môi trường.
- Phân loại:
Sóng dọc là sóng có phương dao độngcủa các phần tử song song (hoặc trùng) với phương truyền
sóng.
Sóng ngang là sóng có phương dao độngcủa các phần tử vuông góc với phương truyền sóng.
- Sự truyền sóng cơ:
Trong một môi trường vật chất, sóng truyền theo các phương với cùng một tốc độ v.
Khi sóng truyền đi, chỉ có pha dao động (trạng thái dao động) truyền đi, còn phần tử vật chất
của môi trường thì dao động tại chỗ.
Sóng dọc truyền được trong cả chất khí, chất lỏng và chất rắn.
Sóng ngang truyền được trong chất rắn vàtrên bề mặt chất lỏng.
Sóng cơ không truyền được trong chân không.
- Các đặc trưng của một sóng hình sin:
Chu kì T: là chu kỳ dao động của một phần tử của môi trường khi có sóng truyền qua. Đơn vị
chu kì là giây (s).
Tần số (f): là đại lượng nghịch đảo của chu kìT
f1
. Đơn vị tần số là Hertz (Hz).
Tốc độ truyền sóng v: là tốc độ lan truyền dao động.
Bước sóng:
Bước sóng là quãng đường sóng truyền trong thời gian một chu kì. Đơn vị bước sóng là đơn vị
độ dài (m).
Công thức liên hệ giữa chu kì (T), tần số (f), tốc độ (v) và bước sóng ( ) là:
vv.T
f
Biên độ sóng tại mỗi điểm trong không gian chính là biên độ dao động của phần tử môi trường
tại điểm đó.
Năng lượng sóng cơ là năng lượng dao động của các phần tử của môi trường mà sóng truyền
qua.
Quá trình truyền sóng là một quá trình truyền năng lượng.
- Phương trình sóng của một sóng hình sin theo trục OX:
Phương trình dao độngcủa nguồnO: Uo = Acost.
Phương trình dao độngcủa điểm M cách nguồn O một khoáng x:
(x > 0) uM =A.cos2π
x
T
t
.
(x < 0) uM =A.cos2π
x
T
t
.
Hình 0-1:Sơ đồ dao động tại điểm M thuộc phương x
(Trong đó t là thời gian sóng truyền từ tâm sóng O tới điểm khảo sát M)
Phương trình sóng là một hàm vừa tuần hoàn theo thời gian vừa tuần hoàn theo không gian.
Dao động của một phần tử sóng tại một điểm là một dao động điều hòa theo thời gian với chu kỳ
T
Sau một khoảng có độ dài bằng bước sóng, sóng có hình dạng lặp lại như cũ.
x
M
X
Y
Độ lệch pha của hai dao động tại hai điểm trên cùng một phương truyền sóng:
Độ lệch pha tại hai điểmM,N cách O lần lượt là d1,d2 là: =
122 dd .
Nếu = 2k, k Z:Dao động tại M cùng pha dao động tại N
d2 - d1 = k
Những điểm trên cùng một phương truyền sóng cách nhau một số nguyên bước sóng thì dao
động cùng pha
Nếu = (2k + 1), k Z: Dao động tại M ngược pha dao động tại N
d2 - d1= (2k + 1) 2
Những điểm trên cùng một phương truyền sóng cách nhau một số lẻ nửa bước sóng (hoặc số nửa
nguyên bước sóng) thì dao động ngượcpha.
1.1.2 Sóng âm
- Sóng âm là các sóng cơ truyền trong các môi trường đàn hồi.
- Phân loại sóng âm:
Âm nghe được (âm thanh) có tần số trong khoảng từ 16 Hz đến 20.000 Hz.
Âm có tần số dưới 16Hz gọi là hạ âm.
Âm có tần số trên 20000Hz gọi là siêu âm.
- Sự truyền âm:
Tốc độ truyền âm phụ thuộc tính chất của môi trường: mật độ môi trường, tính đàn hồi, nhiệt độ
của môi trường.
Tốc độ truyền âm trong các môi trường:vkhí<vlỏng<vrắn
Âm truyền đi rất kém trong các chất như: bông, nhung, xốp, thủy tinh...
Trong chất rắn, sóng âm là sóng ngang và sóng dọc. Trong chất khí và chất lỏng sóng âm chỉ là
sóng dọc.
- Các đặc trưng vật lí của âm: (Tần số âm, Cường độ âm và mức cường độ âm, Đồ thị dao động
của âm)
o Tần số âm là một trong những đặc trưng vật lí quan trọng nhất của âm.
o Cường độ âm và mức cường độ âm:
Cường độ âm I tại một điểm là đại lượng đo bằng lượng năng lượng mà sóng âm tảiqua một đơn
vị diện tích đặt tại điểm đó, vuông góc với phương truyền sóng trong một đơn vị thời gian. Đơn vị
cường độ âm là oát trên mét vuông, kí hiệu W/m2.
o Mức cường độ âm:
L(B) = log(I/I0) Trong đó I0 là cường độ âm chuẩn (âm có tần số 1000Hz, cường độ I0 = 10 12
W/m2);
Đơn vị của mức cường độ âm là Ben, kí hiệu B.
hoặc đơn vị đêxiben (dB)1 dB = (1/10)B L(dB) = 10 log(I/I0)
o Đồ thị dao động của âm
Khi một nhạc cụ phát ra một âm có tần số f0 (gọi là âm cơ bản) thì bao giờ nhạc cụ đó cũng đồng
thời phát ra các âm có tần số 2f0, 3f0... (gọi là hoạ âm thứ 2,3...). Tổng hợp đồ thị dao động của tất cả
các họa âm gọi là đồ thị dao động của âm.
o Các đặc trưng sinh lí của âm(Độ cao, Độ to, Âm sắc)
Độ cao của âm là một đặc trưng sinh lí của âm gắn liền với tần số âm.
Độ to của âm là đặc trưng sinh lí của âm gắn liền với đặc trưng vật lí mức cường độ âm.
Âm sắc là một đặc trưng sinh lí của âm, giúp ta phân biệt âm do các nguồn khác nhau phát ra.
Âm sắc có liên quan mật thiết với đồ thị dao động âm.
- Hiệu ứng Doppler:
Là hiện tượng tần số và bước sóng của cá sóng âm bị thay đổi (tăng hoặc giảm) khi có sự chuyển
động tương đối giữa nguồn âm và máy thu âm.
Chuyển động lại gần: f’> f, chuyển động ra xa: f’< f
+ Công thức tổng quát:
v : Tốc độ truyền âm trong môi trường.
Mv: Tốc độ máy thu
Sv: Tốc độ nguồn âm
1.1.3Hiện tượng giao thoa
- Hiện tượng giao thoa là hiện tượng hai hay nhiều sóng kết hợp khi gặp nhau thì có những điểm
chúng tăng cường hoặc triệt tiêu (giảm bớt) lẫn nhau
- Điều kiện xảy ra hiện tượng giao thoa là:

Hai sóng phải là hai sóng kết hợp.
Hai sóng kết hợp là hai sóng được gây ra bởi hai nguồn có cùng tần số, cùng pha hoặc độ lệch
pha không đổi.
- Phương trình sóng tổng hợp tại một điểm M trong vùng có giao thoa:
Phương trình dao động của hai nguồn:
1 2 osS Su u Ac t
Phương trình sóng tổng hợp tại điểm M:
Hình 0-2: Phương trình sóng tổng hợp tại điểm M
2 1 1 22 cos ( )cos[ ( )]Mu A d d t d d
Biên độ dao động tổng hợp: a =
- Vị trí cực đại và cực tiểu của giao thoa (trong trường hợp hai nguồn sóng kết hợp đồng pha)
Những điểm mà hiệu đường đi của hai sóng từ 2 nguồn tới nó bằng một số nguyên lần bước
sóng là cực đại của giaothoa:
d2 – d1 = k λ; với k = 0, ± 1, ± 2,...
Những điểm mà hiệu đường đi của hai sóng từ 2 nguồn tới nó bằng một số nửa nguyên lần bước
sónglà cực tiểu của giao thoa:
d2 – d1 = (k + ½) λ; với k = 0, ±1, ±2,...
- Hiện tượng giao thoa là một hiện tương đặc trưng củasóng.
1.1.4 Sóng dừng
- Sự phản xạ của sóng:
Khi sóng phản xạ trên vật cản cố định thì sóng tới và sóng phản xạ ngược pha nhau tại điểm
phản xạ.
Khi sóng phản xạ trên vật cản tự do thì sóng tới và sóng phản xạ cùng pha nhau tại điểm phản xạ
- Sóng dừng:
Định nghĩa: Sóng dừng là sóng có các bụng và nút sóng cố định.
M
S2 S1
d2 d1
o Đặc điểm:
Khoảng cách giữa hai bụng sóng (hoặc hai nút) liền kề là λ/2.
Khoảng cách giữa một bụng sóng và một nút sóng liền kề là λ/4.
o Điều kiện để có sóng dừng trên một sợi dây có hai đầu A, B cố định là:
Chiều dài của sợi dây l =AB phải bằng một số nguyên lần nửa bước sóng:
l = k
A, B là nút
Số bụng = k, số nút = k + 1
o Điều kiện để có sóng dừng trên một sợi dây có đầu A cố định, đầu B tự do là:
l = (2k+1) = (k + ½)
A là nút, B là bụng.
Số bụng = sốnút = k + 1.
1.2 Sự lan truyền của sóng âm trong chất rắn
1.2.1Sự truyền âm
Sóng âm có thể lan truyền trong mọi vật chất ở 3 dạng: rắn, lỏng và khí. Âm dễ truyền trong vật
rắn, sau đó đến chất lỏng và chất khí. Khi âm truyền trong vật chất sẽ làm cho các phân tử của vật chất
co lại hay giãn ra, rồi nhờ các chuyển động liên tiếp đó mà âm được truyền đi. Cũng vì lẽ đó mà âm
thanh phụ thuộc khá nhiều vào chất liệu, nhiệt độ, áp suất của môi trường vật chất mà nó truyền qua.
1.2.2Sóng âm bề mặt
Năm 1887, Raleigh khám phá ra cách thức truyền dẫn, thuộc tính của sóng âm bề mặt (gọi là
SAW), theo đó sóng âm truyền dọc theo mặt phẳng của một rắn đàn hồi.
Ở hình 1-3, mô tả cách tạo ra sóng bề mặt, sử dụng những tấm kim loại đặt trên bề mặt vật liệu
áp điện. Khi có dòng điện, vật liệu áp điện sinh ra những dao động trên bề mặt, những sóng đó gọi là
sóng R-SAW (Raleigh Surface Acoustics Wave).
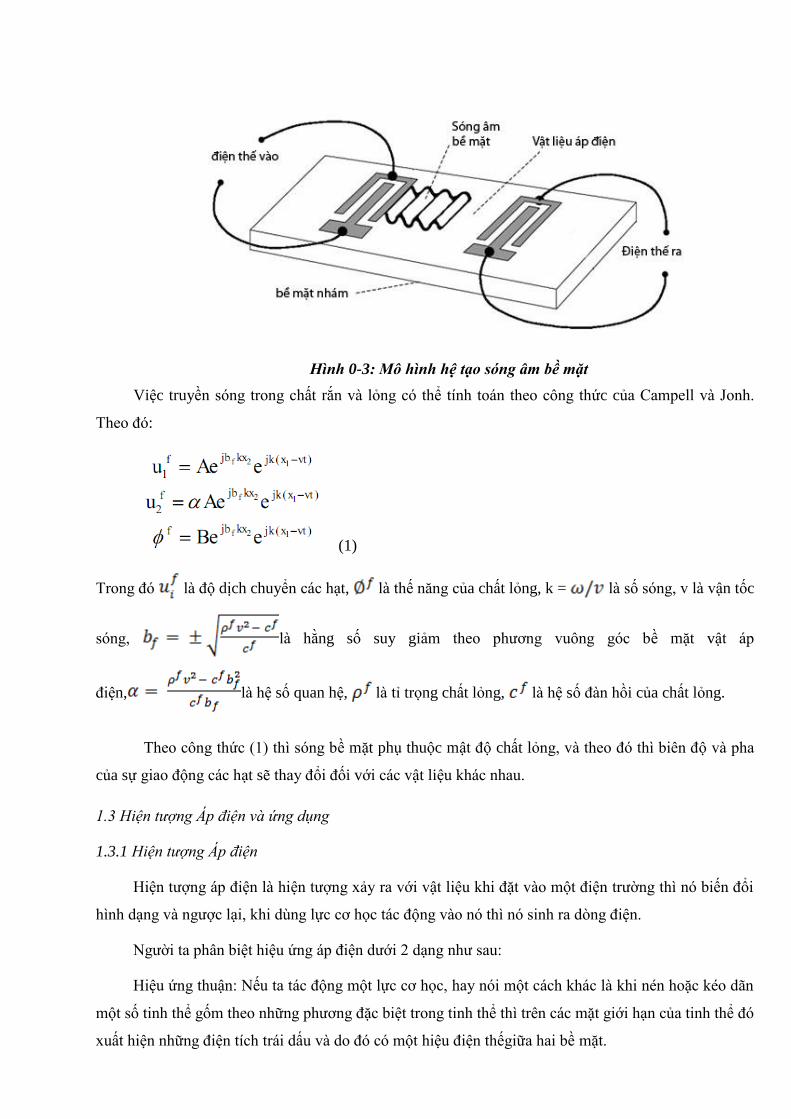
Hình 0-3: Mô hình hệ tạo sóng âm bề mặt
Việc truyền sóng trong chất rắn và lỏng có thể tính toán theo công thức của Campell và Jonh.
Theo đó:
(1)
Trong đó là độ dịch chuyển các hạt, là thế năng của chất lỏng, k = là số sóng, v là vận tốc
sóng, là hằng số suy giảm theo phương vuông góc bề mặt vật áp
điện, là hệ số quan hệ, là tỉ trọng chất lỏng, là hệ số đàn hồi của chất lỏng.
Theo công thức (1) thì sóng bề mặt phụ thuộc mật độ chất lỏng, và theo đó thì biên độ và pha
của sự giao động các hạt sẽ thay đổi đối với các vật liệu khác nhau.
1.3 Hiện tượng Áp điện và ứng dụng
1.3.1 Hiện tượng Áp điện
Hiện tượng áp điện là hiện tượng xảy ra với vật liệu khi đặt vào một điện trường thì nó biến đổi
hình dạng và ngược lại, khi dùng lực cơ học tác động vào nó thì nó sinh ra dòng điện.
Người ta phân biệt hiệu ứng áp điện dưới 2 dạng như sau:
Hiệu ứng thuận: Nếu ta tác động một lực cơ học, hay nói một cách khác là khi nén hoặc kéo dãn
một số tinh thể gốm theo những phương đặc biệt trong tinh thể thì trên các mặt giới hạn của tinh thể đó
xuất hiện những điện tích trái dấu và do đó có một hiệu điện thếgiữa hai bề mặt.
Hiệu ứng nghịch: Nếu ta đặt lên tinh thể gốm áp điện một hiệu điện thế thì phụ thuộc vào chiều
của hiệu điện thế đó tinh thể gốm sẽ dãn ra hay nén lại. Và nếu như ta đặt lên tinh thể gốm một hiệu
điện thế xoay chiều thì tinh thể gốm sẽ nén giãn liên tiếp và dao động theo tần số của hiệu điện thế
xoay chiều, tạo ra áp lực nén và dãn liên tục vào môi trường bao quanh tức là tạo ra sóng âm.
1.3.2Ứng dụng của hiện tượng áp điện
Hiện tượng này được đề cập đầu tiên vào năm 1817 và được nghiên cứu từ những năm 1880.
Cho đến ngày nay, hiệu ứng này được ứng dụng rộng rãi trong kỹ thuật, phục vụ đời sống như: bật lửa,
máy đo, máy siêu âm, động cơ kích thước nhỏ, … Thậm chí còn được ứng dụng trong các kỹ thuật
hàng không, vũ trụ cũng như những ứng dụng đơn giản khác.
1.4 Kết luận chương
Trong luận văn này, tác giả mô phỏng lại hiệu ứng áp điện trên nền vật liệu áp điện, từ đó khảo
sát những tác động của nó lên hệ thống vòi phun mực và ứng dụng của vật liệu áp điện với vòi phun
mực thông minh.
BÀI TOÁN ĐIỀU KHIỂN KÍCH CỠ GIỌT CHẤT LỎNG
2.1 Nguyên lý hoạt động máy in phun dùng tinh thể áp điện
2.1.1 Máy in phun
Trong luận văn này, tác giả mô phỏng lại hiệu ứng áp điện trên nền vật liệu áp điện, từ đó khảo
sát những tác động của nó lên hệ thống vòi phun mực và ứng dụng của vật liệu áp điện với vòi phun
mực thông minh.
Máy in phun hoạt động theo theo nguyên lý phun mực vào giấy in. Mực in được phun qua một
lỗ nhỏ theo từng giọt với một tốc độ lớn (khoảng 5000 lần/giây) tạo ra các điểm mực đủ nhỏ để thể
hiện bản in sắc nét.
Đa số các máy in phun thường là các máy in màu. Để in ra màu sắc cần tối thiểu 3 loại mực.
Các màu sắc được thể hiện bằng cách pha trộn ba màu cơ bản với nhau.
Trước đây các hộp mực màu của máy in phun thường được thiết kế cùng khối, tuy nhiên nếu in
nhiều bản in thiên về một màu nào đó sẽ dẫn đến hiện tượng có một màu hết trước, để tiếp tục in cần
thay hộp mực mới nên gây lãng phí đối với các màu còn lại chưa hết. Ngày nay các hộp màu được
tách riêng biệt và tăng số lượng các loại màu để phối trộn (nhiều hơn 3 màu - không kể đến hộp màu
đen) sẽ cho bản in đẹp hơn, giảm chi phí hơn trước.
So sánh trong các thể loại máy in thì máy in phun thường có chi phí trên mỗi bản in lớn nhất.
Các máy in phun thường có giá thành thấp (thấp hơn máy in lasez) nhưng các hộp mực cho máy in
phun lại có giá cao, số lượng bản in trên bộ hộp mực thấp.
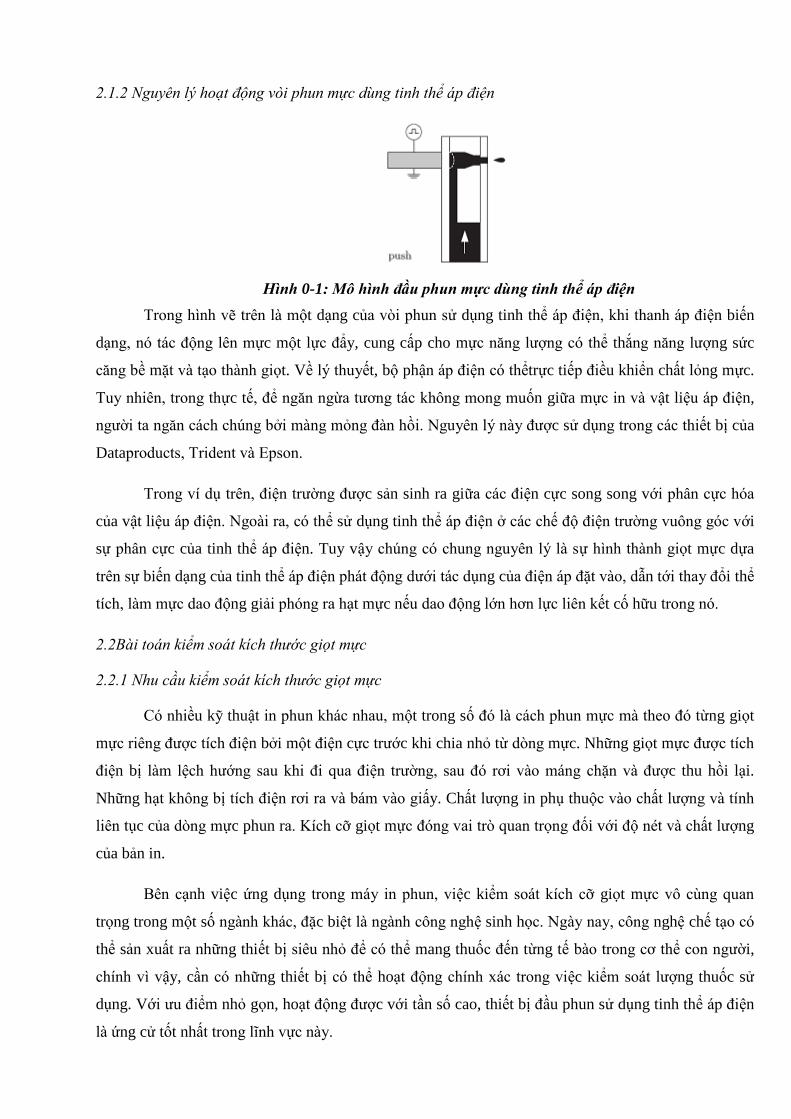
2.1.2 Nguyên lý hoạt động vòi phun mực dùng tinh thể áp điện
Hình 0-1: Mô hình đầu phun mực dùng tinh thể áp điện
Trong hình vẽ trên là một dạng của vòi phun sử dụng tinh thể áp điện, khi thanh áp điện biến
dạng, nó tác động lên mực một lực đẩy, cung cấp cho mực năng lượng có thể thắng năng lượng sức
căng bề mặt và tạo thành giọt. Về lý thuyết, bộ phận áp điện có thểtrực tiếp điều khiển chất lỏng mực.
Tuy nhiên, trong thực tế, để ngăn ngừa tương tác không mong muốn giữa mực in và vật liệu áp điện,
người ta ngăn cách chúng bởi màng mỏng đàn hồi. Nguyên lý này được sử dụng trong các thiết bị của
Dataproducts, Trident và Epson.
Trong ví dụ trên, điện trường được sản sinh ra giữa các điện cực song song với phân cực hóa
của vật liệu áp điện. Ngoài ra, có thể sử dụng tinh thể áp điện ở các chế độ điện trường vuông góc với
sự phân cực của tinh thể áp điện. Tuy vậy chúng có chung nguyên lý là sự hình thành giọt mực dựa
trên sự biến dạng của tinh thể áp điện phát động dưới tác dụng của điện áp đặt vào, dẫn tới thay đổi thể
tích, làm mực dao động giải phóng ra hạt mực nếu dao động lớn hơn lực liên kết cố hữu trong nó.
2.2Bài toán kiểm soát kích thước giọt mực
2.2.1 Nhu cầu kiểm soát kích thước giọt mực
Có nhiều kỹ thuật in phun khác nhau, một trong số đó là cách phun mực mà theo đó từng giọt
mực riêng được tích điện bởi một điện cực trước khi chia nhỏ từ dòng mực. Những giọt mực được tích
điện bị làm lệch hướng sau khi đi qua điện trường, sau đó rơi vào máng chặn và được thu hồi lại.
Những hạt không bị tích điện rơi ra và bám vào giấy. Chất lượng in phụ thuộc vào chất lượng và tính
liên tục của dòng mực phun ra. Kích cỡ giọt mực đóng vai trò quan trọng đối với độ nét và chất lượng
của bản in.
Bên cạnh việc ứng dụng trong máy in phun, việc kiểm soát kích cỡ giọt mực vô cùng quan
trọng trong một số ngành khác, đặc biệt là ngành công nghệ sinh học. Ngày nay, công nghệ chế tạo có
thể sản xuất ra những thiết bị siêu nhỏ để có thể mang thuốc đến từng tế bào trong cơ thể con người,
chính vì vậy, cần có những thiết bị có thể hoạt động chính xác trong việc kiểm soát lượng thuốc sử
dụng. Với ưu điểm nhỏ gọn, hoạt động được với tần số cao, thiết bị đầu phun sử dụng tinh thể áp điện
là ứng cử tốt nhất trong lĩnh vực này.
2.2.2 Các phương pháp thực hiện
Để giải quyết bài toán tính toán thể tích giọt mực, có 2 phương án thường sử dụng: Tính toán
lý thuyết và Mô phỏng số. Ở đây chỉ nói đến đầu phun mực sử dụng tinh thể áp điện làm bộ chấp
hành.
Dữ liệu đầu vào là các tính chất vật lý của hệ thống phun, các thuộc tính của chất liệu áp điện
và chất lỏng, điện thế đặt vào tinh thể áp điện.
Với việc tính toán lý thuyết, người thực hiện cần căn cứ vào các giá trị lý thuyết để tính ra kích
thước giọt mực được đẩy ra khỏi vòi phun. Việc này trên thực tế rất khó khăn, và mất rất nhiều thời
gian, chưa kể độ chính xác của các tính toán.
Với cách thức mô phỏng số, kết quả của mô phỏng sẽ mang lại một cái nhìn trực quan hơn, từ
đó giúp việc phán đoán các hướng đi cho bài toán được thuận lợi hơn, cũng như hỗ trợ cho việc tính
toán lý thuyết tìm ra các giải bài toán.
2.2.3 Lựa chọn phương pháp
Các hiện tượng vật lí nói chung thường được miêu tả bằng các phương trình toán học, thông
thường đó là các phương trình vi phân từng phần. Giải pháp giải tích cho phương trình vi phân từng
phần đòi hỏihàm diễn tả theo biến phụ thuộc liên tục trong một miền nào đó. Tuy nhiên ở đây ta gặp
một khó khăn thực sự khi xây dựng phương trình vi phân cho chất lỏng ở hai môi trường khác nhau,
môi trường chất lỏng và môi trường khí. Chất lỏng trong môi trường chất lỏng được diễn tả theo
phương trình dòng chảy chấtlỏng không bị nén Navier-stokes. Trong khi đó chất lỏng trong môi
trường khítuân theo phương trình khuếch tán Cahn – Hilliard. Ngoài ra nó phụ thuộc vào tính chất của
chất lỏng bên môi trường lỏng, tính chất chấtlỏng bên môi trường khí và tương tác chất lỏng cấu trúc
rắn, cấu trúc rắn với môi trường khí. Đó là một bài toán cực kỳ phức tạp. Trong đề tài này tác giả tiếp
cận bài toán theo phương pháp xấp xỉ, theo đó xây dựng một mô hình nguyên lí từ đó tìm hiểu tác
động của một số tham số chính, dự đoán chiều hướng ảnh hưởng của những tham số đó, từ đó tìm ra
một giải pháp gần tối ưu để thiết kế nên hệ thống chúng ta cần.
Sau khi xây dựng được mô hình toán, công đoạn tiếp theo sử dụng công cụ mô phỏng để giải
hệ phương trình vi phân.Chúngta có thể chọn một số chương trình như Matlab, Ansys, hay Comsol…
Trong đề tài này ta chọn Comsol vì tính trực quan của phần mềm, và Mathlab để xử lý các kết quả thu
được từ mô phỏng.
2.3 Kết luận chương
Trong chương này, tác giả đưa ra các lựa chọn để giải bài toán tính thể tích khối chất lỏng phun
ra từ đầu phun mực. Từ những khó khăn, thuận lợi của các phương pháp cũng như thời gian thực hiện,
tác giả chọn phương pháp mô phỏng số với công cụ Comsol Multiphysics để mô phỏng và trực quan
hóa hiện tượng vật lý của vòi phun mực. Từ đó có thể đưa ra hướng đi đúng đắn cho bài toán này.
Trong chương tiếp theo, tác giả trình bày chi tiết việc mô phỏng với Comsol và những kết quả
đã đạt được tới thời điểm hiện tại.
MÔ PHỎNG BÀI TOÁN VỚI COMSOL MULTIPHYSICS
3.1 Xây dựng mô hình mô phỏng
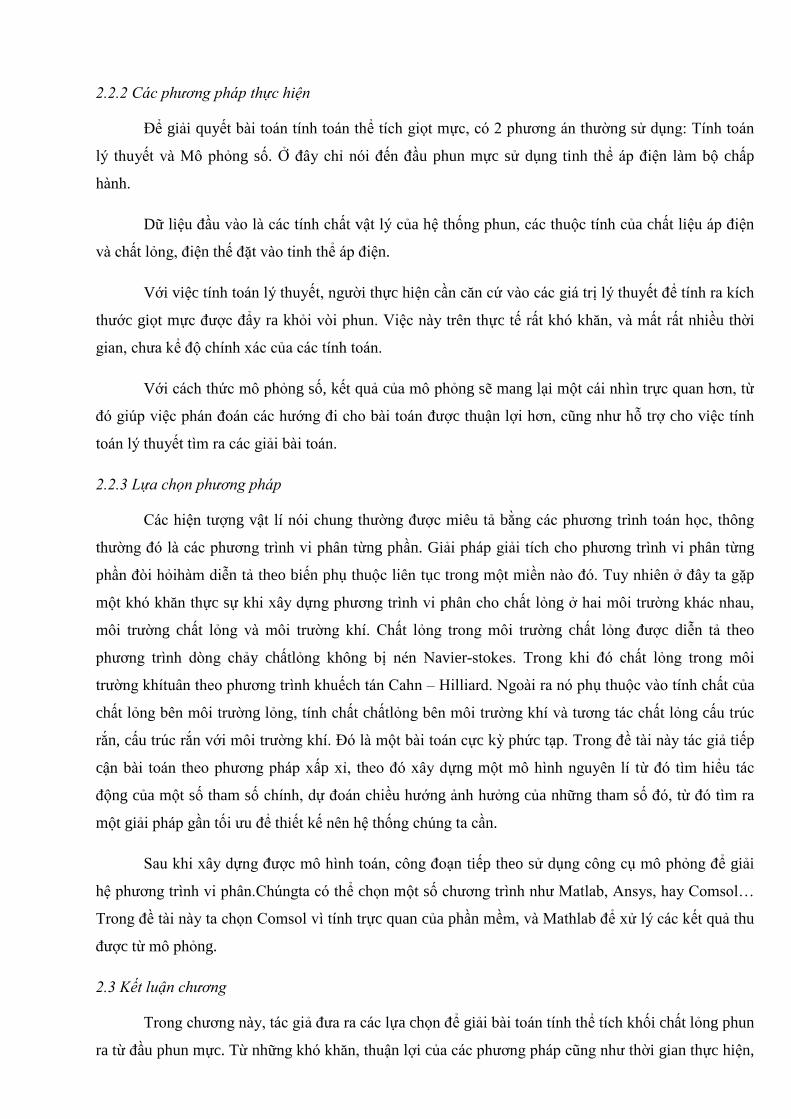
3.1.1 Mô hình giả định
Để thực hiện mô phỏng, mô hình đầu phun mực có gắn cảm biến SAW được thể hiện trên hình
3-1. Khi bộ chấp hành được kích hoạt, mực được bơm ra, khi đó mặt thoáng giữa chất lỏng và không
khí trên đầu phun mực thay đổi. Chất lỏng trong đầu phun mực thay đổi dẫn đến tín hiệu nhận được
trên IDT (interdigital transducer) đầu ra của cảm biến thay đổi. Thông qua việc giám sát thay đổi về
biên độ, tần số và pha của tín hiệu trên IDT đầu ra so với IDT tham chiếu, các thông số về giọt mực lối
ra như thể tích, vận tốc và hình dạng hoàn toàn có thể ước đoán.
Cấu tạo của cảm biến SAW bao gồm hai IDT, một đóng vai trò phát và cái còn lại là bộ thu,
được đặt trên một cấu trúc vật liệu áp điện khối (bulk piezoelectric). Khi đặt vào IDT phát một tín hiệu
dao động điều hòa, sóng SAW sẽ được tạo ra và truyền trên bề mặt cấu trúc đến IDT thu. Các thay đổi
về cấu trúc, tính chất của hệ thống trên đường truyền sóng gây ra do dòng chất lỏng sẽ được biến điệu
và thu được trên IDT thu.
(a)
(b)
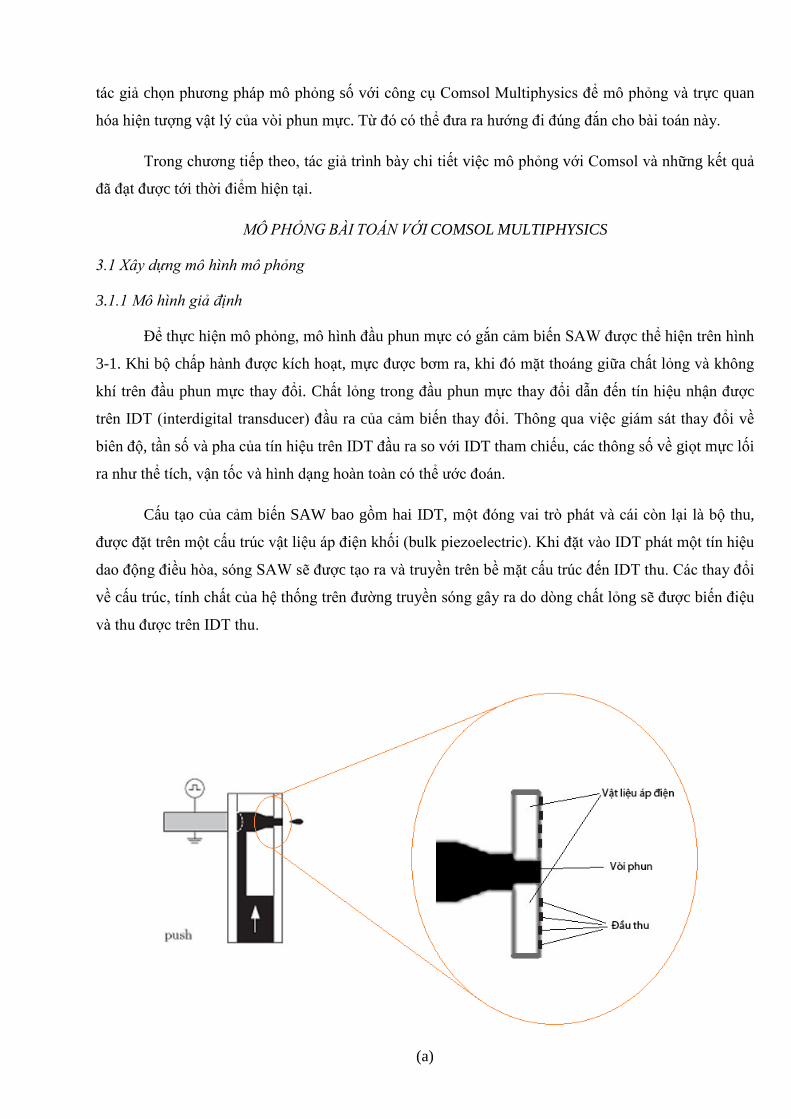
Hình 0-1: Mô hình giả định vòi phun mực
3.1.2 Ứng dụng sóng âm bề mặt trong bài toán
Trong mô hình trên, nếu ta tạo một sóng âm bề mặt theo cách đã mô tả ở hình 1.3, khối chất
rắn được chọn là khối vật liệu áp điện. Khi đó sóng sẽ truyền trên bề mặt chất áp điện, truyền qua lỗ có
chứa chất lỏng và truyền đến bộ thu.
Bản chất truyền sóng âm là truyền dao động của các hạt phần tử vật chất, như vậy về lý thuyết
có thể phỏng đoán khi truyền qua lỗ chứa chất lỏng sẽ có sự biến thiên dao động tại phía bên kia lỗ so
với bên phát sóng (giả sử sóng đến từ bên A và truyền sang bên B như hình 3.1). Sự dao động khi
truyền đến bên thu sẽ sinh ra dòng điện, ta sẽ đi khảo sát cụ thể trong các trường hợp.
Thiết kế, mô phỏng cấu trúc của đầu phun mực có gắn cảm biến SAW sử dụng phần mềm
Comsol là nội dung được đặt ra cho luận văn thạc sĩ này.
3.1.3 Xây dựng mô hình mô phỏng với Comsol
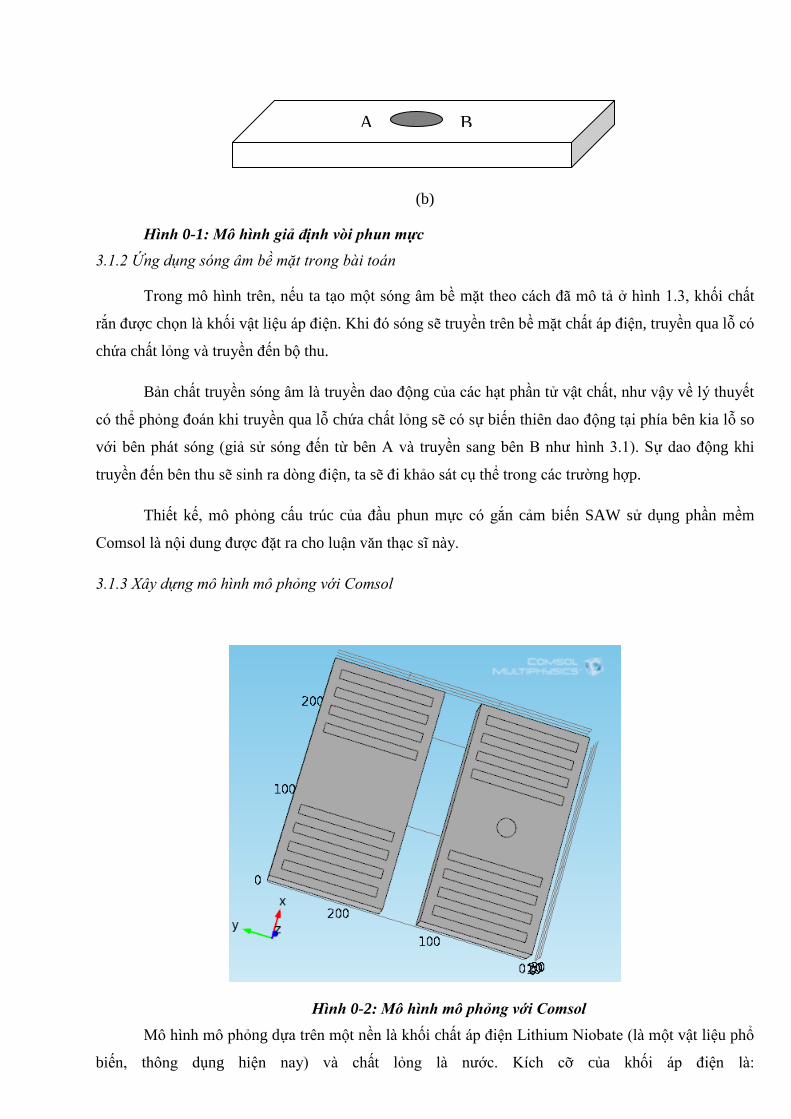
Hình 0-2: Mô hình mô phỏng với Comsol
Mô hình mô phỏng dựa trên một nền là khối chất áp điện Lithium Niobate (là một vật liệu phổ
biến, thông dụng hiện nay) và chất lỏng là nước. Kích cỡ của khối áp điện là:
A B
(240 x120 x30 ). Mặt đế được gắn cứng để tránh những dao động không cần thiết.Chính
giữa khối là một giếng chứa chất lỏng khảo sát bán kính 10 , chiều cao 30 .
Trên bề mặt khối áp điện được gắn các điện cực, điện thế được đặt vào ở một bên và lấy ra ở
phía bên kia. Trong bài toán này, tác giả thực hiện mô phỏng và khảo sát dao động tại ngay trước và
ngay sau miệng giếng chứa chất lỏng và điện thế lối ra khi truyền qua hệ. Mô phỏng đồng thời trên 2
kênh: kênh không có giếng chứa chất lỏng và kênh có giếng chứa chất lỏng chảy đều trong giếng. Sau
đó tiến hành mô phỏng với trường hợp chất lỏng trong giếng dao động với tần số xác định, và đánh giá
các kết quả thu được.
3.2Tiến hành mô phỏng
3.2.1 Giới thiệu phần mềm Comsol
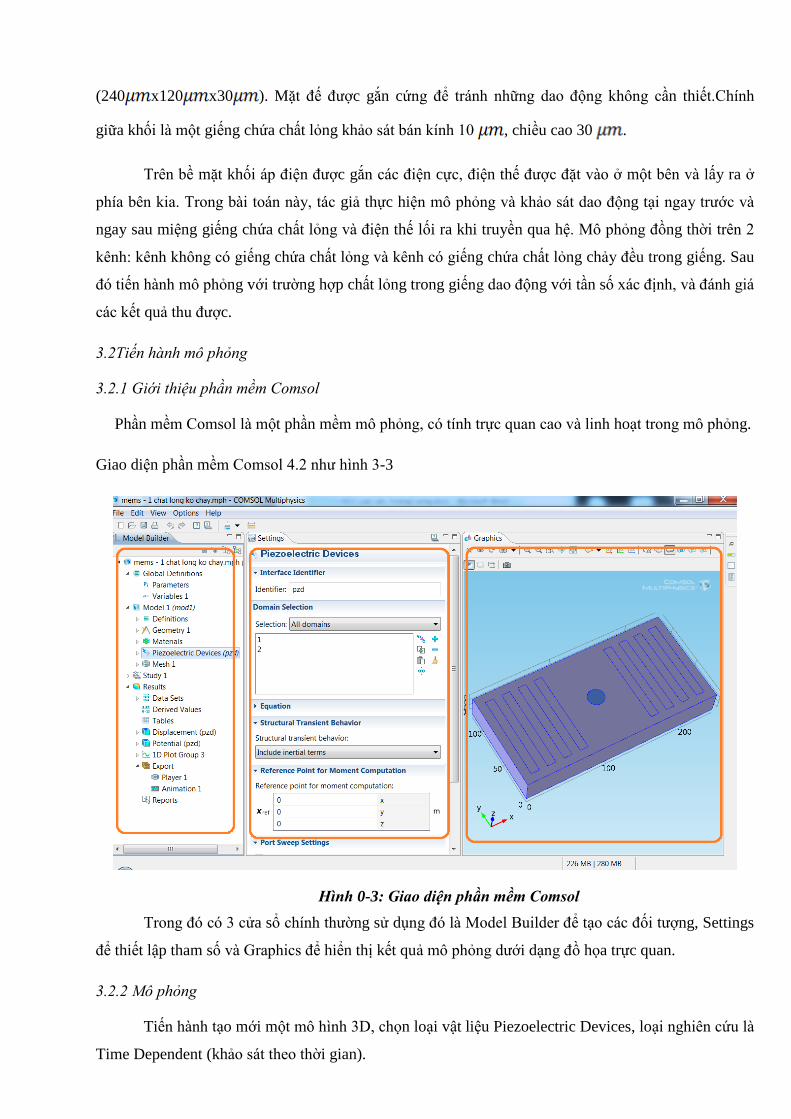
Phần mềm Comsol là một phần mềm mô phỏng, có tính trực quan cao và linh hoạt trong mô phỏng.
Giao diện phần mềm Comsol 4.2 như hình 3-3
Hình 0-3: Giao diện phần mềm Comsol
Trong đó có 3 cửa sổ chính thường sử dụng đó là Model Builder để tạo các đối tượng, Settings
để thiết lập tham số và Graphics để hiển thị kết quả mô phỏng dưới dạng đồ họa trực quan.
3.2.2 Mô phỏng
Tiến hành tạo mới một mô hình 3D, chọn loại vật liệu Piezoelectric Devices, loại nghiên cứu là
Time Dependent (khảo sát theo thời gian).
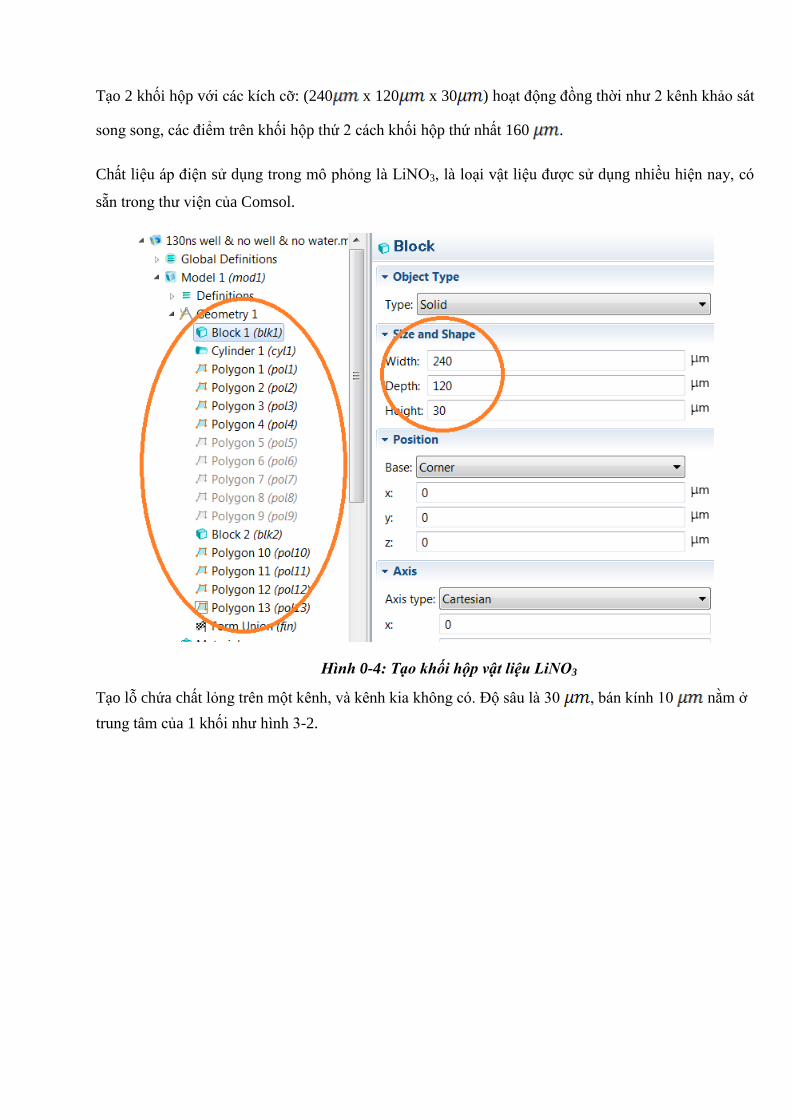
Tạo 2 khối hộp với các kích cỡ: (240 x 120 x 30 ) hoạt động đồng thời như 2 kênh khảo sát
song song, các điểm trên khối hộp thứ 2 cách khối hộp thứ nhất 160 .
Chất liệu áp điện sử dụng trong mô phỏng là LiNO3, là loại vật liệu được sử dụng nhiều hiện nay, có
sẵn trong thư viện của Comsol.
Hình 0-4: Tạo khối hộp vật liệu LiNO3
Tạo lỗ chứa chất lỏng trên một kênh, và kênh kia không có. Độ sâu là 30 , bán kính 10 nằm ở
trung tâm của 1 khối như hình 3-2.
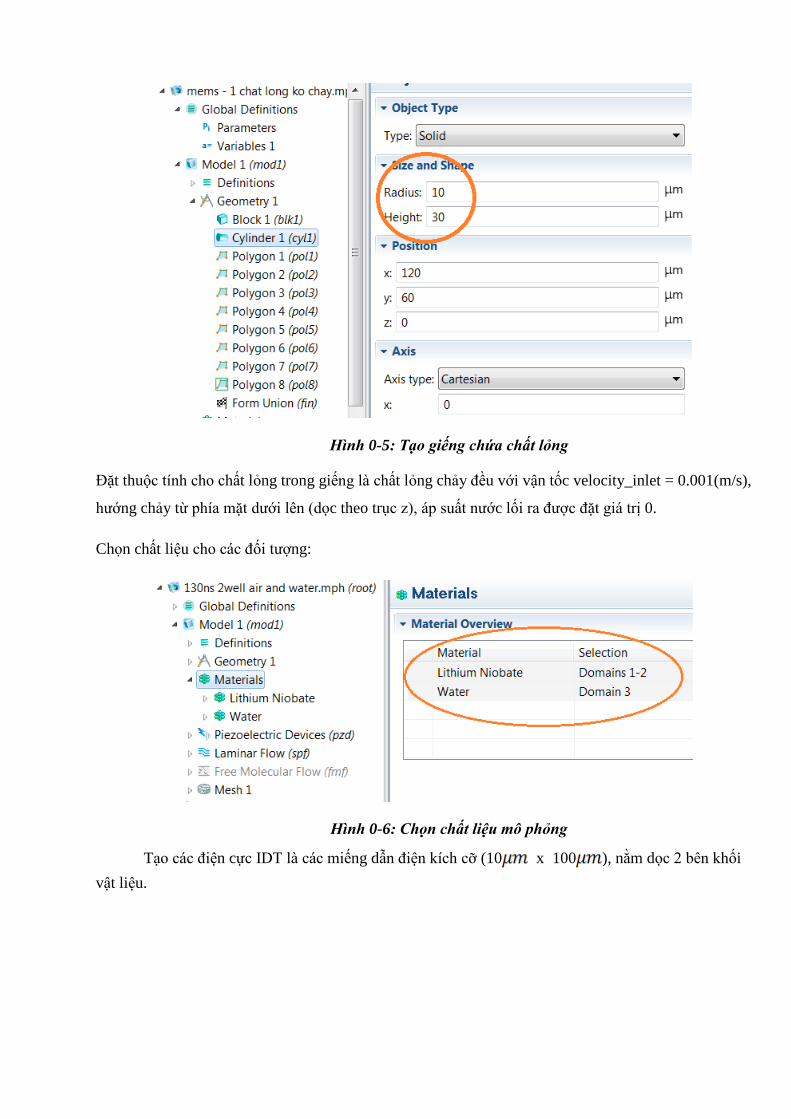
Hình 0-5: Tạo giếng chứa chất lỏng
Đặt thuộc tính cho chất lỏng trong giếng là chất lỏng chảy đều với vận tốc velocity_inlet = 0.001(m/s),
hướng chảy từ phía mặt dưới lên (dọc theo trục z), áp suất nước lối ra được đặt giá trị 0.
Chọn chất liệu cho các đối tượng:
Hình 0-6: Chọn chất liệu mô phỏng
Tạo các điện cực IDT là các miếng dẫn điện kích cỡ (10 x 100 ), nằm dọc 2 bên khối
vật liệu.
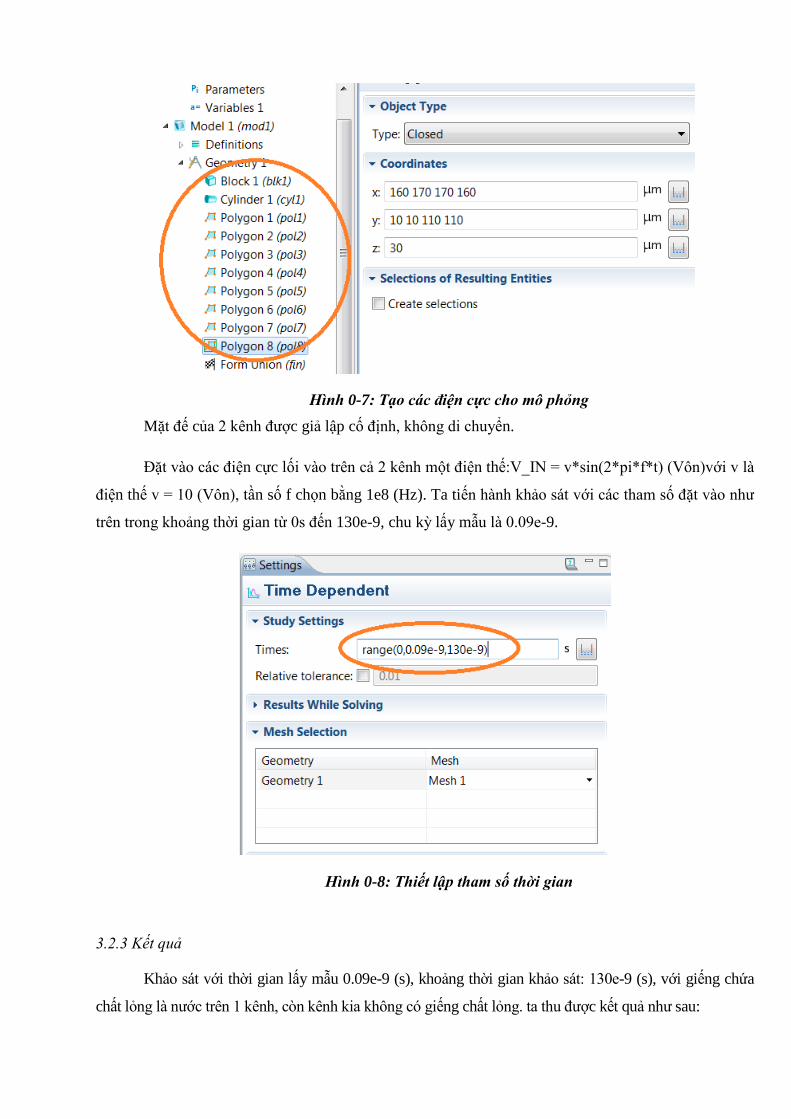
Hình 0-7: Tạo các điện cực cho mô phỏng
Mặt đế của 2 kênh được giả lập cố định, không di chuyển.
Đặt vào các điện cực lối vào trên cả 2 kênh một điện thế:V_IN = v*sin(2*pi*f*t) (Vôn)với v là
điện thế v = 10 (Vôn), tần số f chọn bằng 1e8 (Hz). Ta tiến hành khảo sát với các tham số đặt vào như
trên trong khoảng thời gian từ 0s đến 130e-9, chu kỳ lấy mẫu là 0.09e-9.
Hình 0-8: Thiết lập tham số thời gian
3.2.3 Kết quả
Khảo sát với thời gian lấy mẫu 0.09e-9 (s), khoảng thời gian khảo sát: 130e-9 (s), với giếng chứa
chất lỏng là nước trên 1 kênh, còn kênh kia không có giếng chất lỏng. ta thu được kết quả như sau:
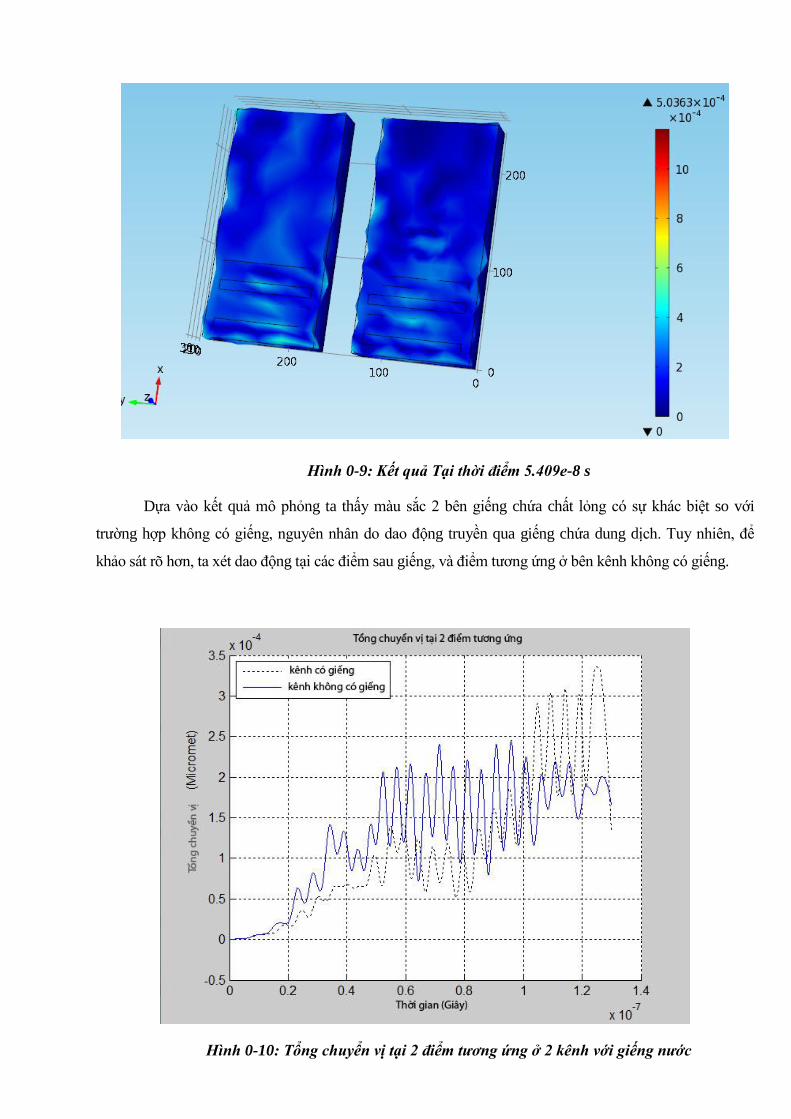
Hình 0-9: Kết quả Tại thời điểm 5.409e-8 s
Dựa vào kết quả mô phỏng ta thấy màu sắc 2 bên giếng chứa chất lỏng có sự khác biệt so với
trường hợp không có giếng, nguyên nhân do dao động truyền qua giếng chứa dung dịch. Tuy nhiên, để
khảo sát rõ hơn, ta xét dao động tại các điểm sau giếng, và điểm tương ứng ở bên kênh không có giếng.
Hình 0-10: Tổng chuyển vị tại 2 điểm tương ứng ở 2 kênh với giếng nước
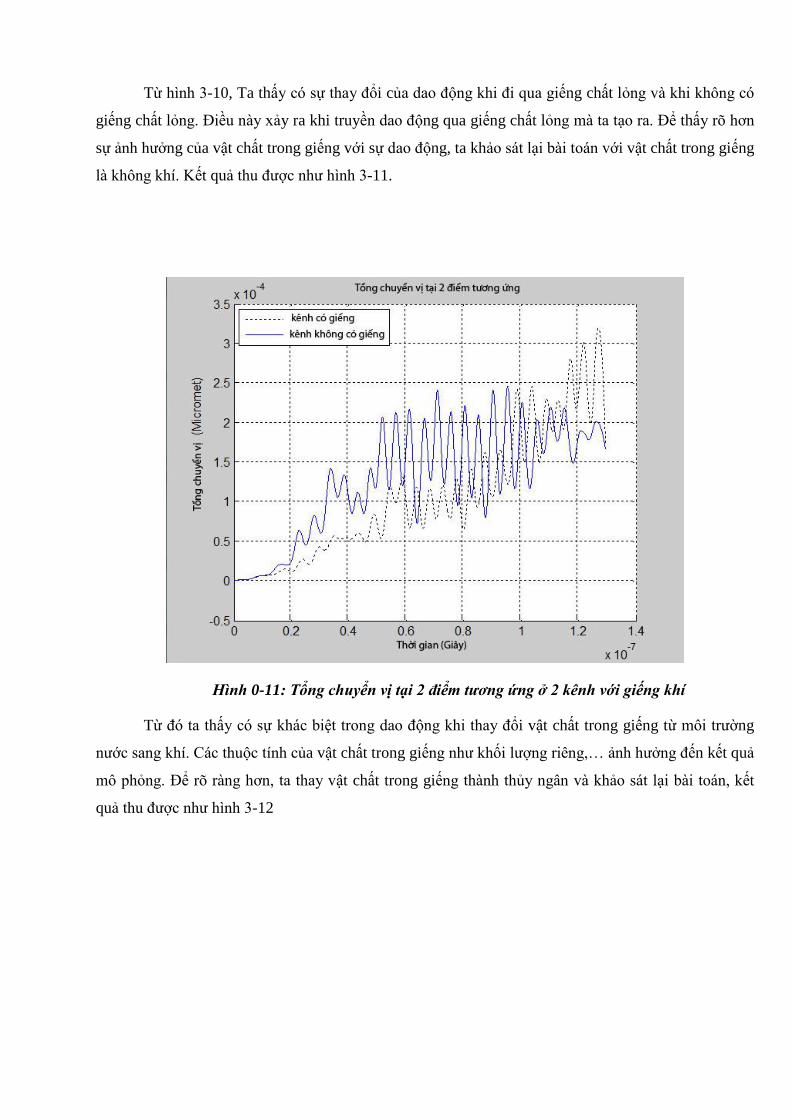
Từ hình 3-10, Ta thấy có sự thay đổi của dao động khi đi qua giếng chất lỏng và khi không có
giếng chất lỏng. Điều này xảy ra khi truyền dao động qua giếng chất lỏng mà ta tạo ra. Để thấy rõ hơn
sự ảnh hưởng của vật chất trong giếng với sự dao động, ta khảo sát lại bài toán với vật chất trong giếng
là không khí. Kết quả thu được như hình 3-11.
Hình 0-11: Tổng chuyển vị tại 2 điểm tương ứng ở 2 kênh với giếng khí
Từ đó ta thấy có sự khác biệt trong dao động khi thay đổi vật chất trong giếng từ môi trường
nước sang khí. Các thuộc tính của vật chất trong giếng như khối lượng riêng,… ảnh hưởng đến kết quả
mô phỏng. Để rõ ràng hơn, ta thay vật chất trong giếng thành thủy ngân và khảo sát lại bài toán, kết
quả thu được như hình 3-12
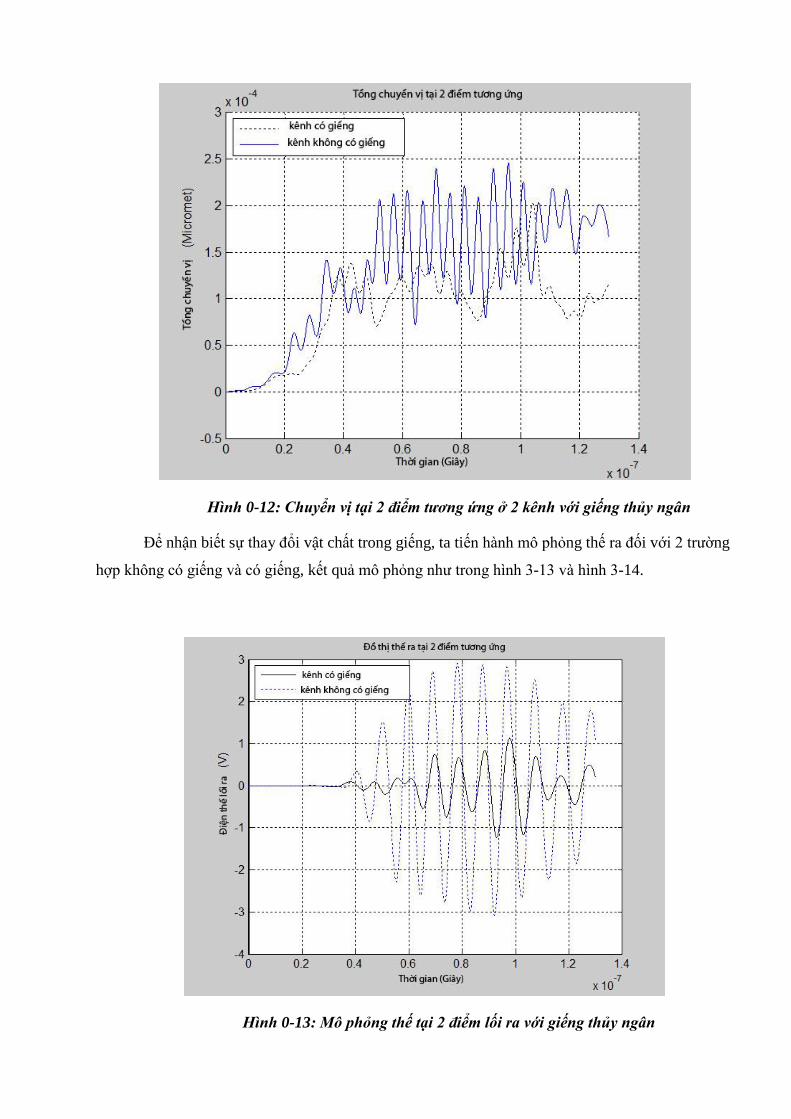
Hình 0-12: Chuyển vị tại 2 điểm tương ứng ở 2 kênh với giếng thủy ngân
Để nhận biết sự thay đổi vật chất trong giếng, ta tiến hành mô phỏng thế ra đối với 2 trường
hợp không có giếng và có giếng, kết quả mô phỏng như trong hình 3-13 và hình 3-14.
Hình 0-13: Mô phỏng thế tại 2 điểm lối ra với giếng thủy ngân
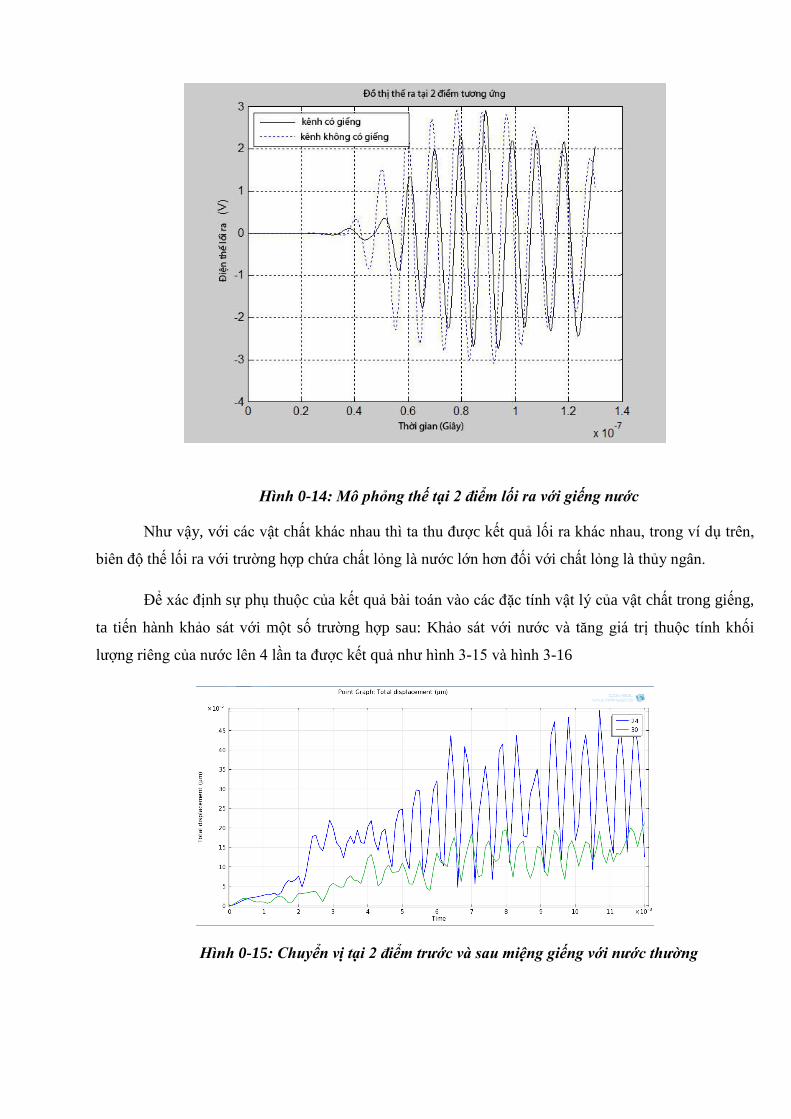
Hình 0-14: Mô phỏng thế tại 2 điểm lối ra với giếng nước
Như vậy, với các vật chất khác nhau thì ta thu được kết quả lối ra khác nhau, trong ví dụ trên,
biên độ thế lối ra với trường hợp chứa chất lỏng là nước lớn hơn đối với chất lỏng là thủy ngân.
Để xác định sự phụ thuộc của kết quả bài toán vào các đặc tính vật lý của vật chất trong giếng,
ta tiến hành khảo sát với một số trường hợp sau: Khảo sát với nước và tăng giá trị thuộc tính khối
lượng riêng của nước lên 4 lần ta được kết quả như hình 3-15 và hình 3-16
Hình 0-15: Chuyển vị tại 2 điểm trước và sau miệng giếng với nước thường
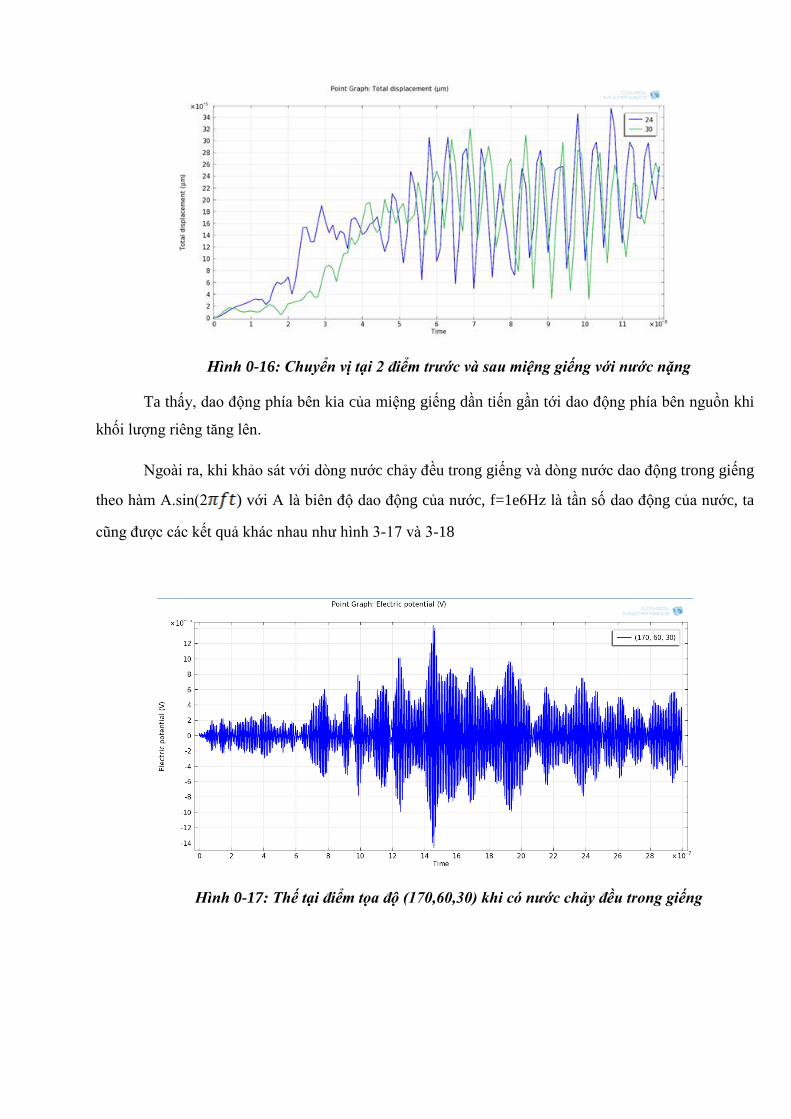
Hình 0-16: Chuyển vị tại 2 điểm trước và sau miệng giếng với nước nặng
Ta thấy, dao động phía bên kia của miệng giếng dần tiến gần tới dao động phía bên nguồn khi
khối lượng riêng tăng lên.
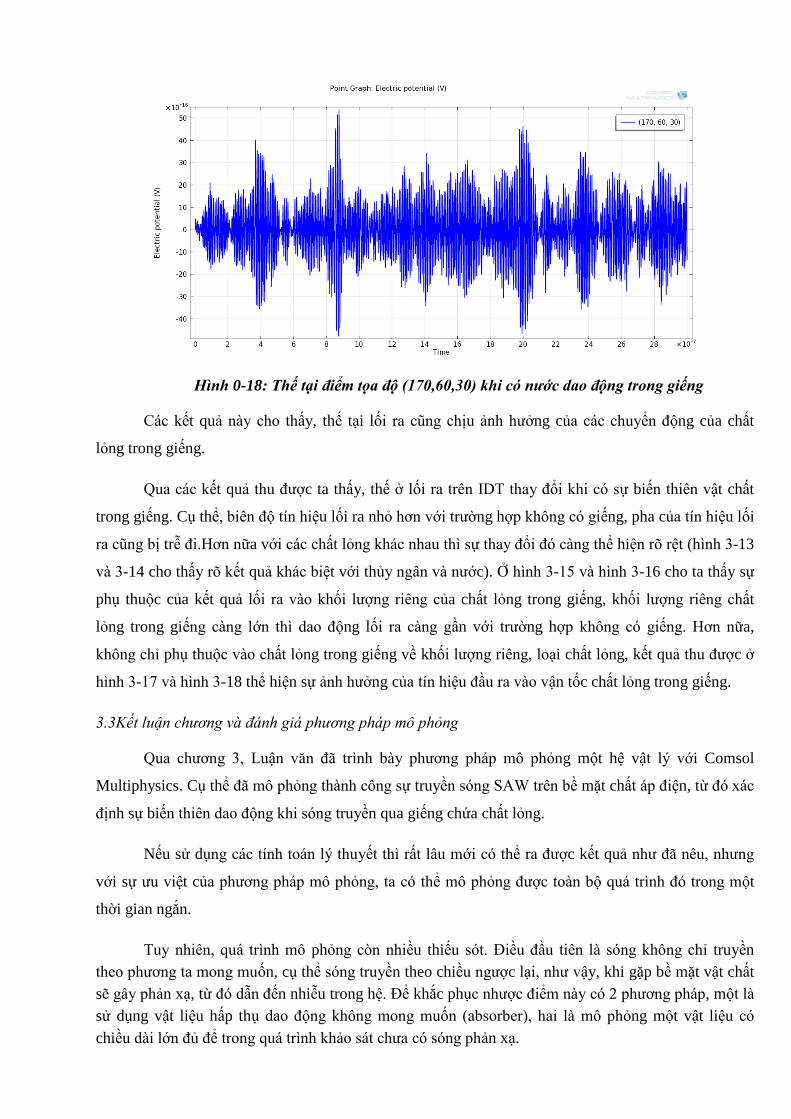
Ngoài ra, khi khảo sát với dòng nước chảy đều trong giếng và dòng nước dao động trong giếng
theo hàm A.sin(2 ) với A là biên độ dao động của nước, f=1e6Hz là tần số dao động của nước, ta
cũng được các kết quả khác nhau như hình 3-17 và 3-18
Hình 0-17: Thế tại điểm tọa độ (170,60,30) khi có nước chảy đều trong giếng
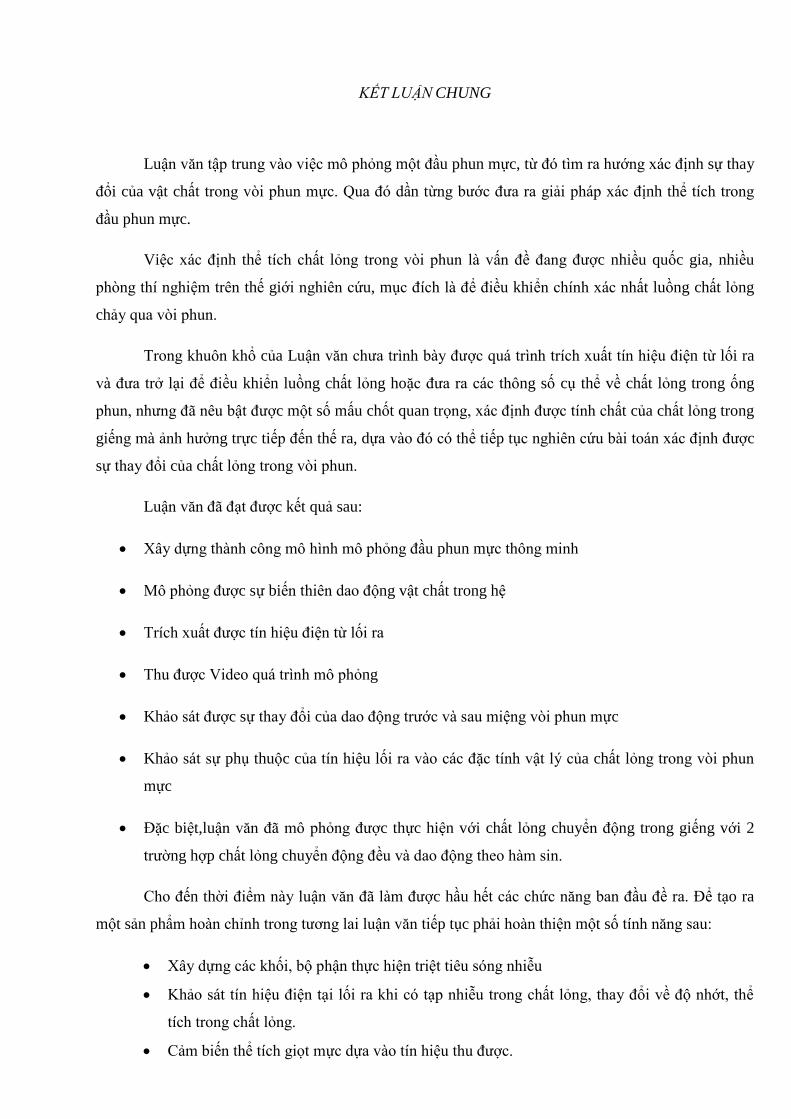
Hình 0-18: Thế tại điểm tọa độ (170,60,30) khi có nước dao động trong giếng
Các kết quả này cho thấy, thế tại lối ra cũng chịu ảnh hưởng của các chuyển động của chất
lỏng trong giếng.
Qua các kết quả thu được ta thấy, thế ở lối ra trên IDT thay đổi khi có sự biến thiên vật chất
trong giếng. Cụ thể, biên độ tín hiệu lối ra nhỏ hơn với trường hợp không có giếng, pha của tín hiệu lối
ra cũng bị trễ đi.Hơn nữa với các chất lỏng khác nhau thì sự thay đổi đó càng thể hiện rõ rệt (hình 3-13
và 3-14 cho thấy rõ kết quả khác biệt với thủy ngân và nước). Ở hình 3-15 và hình 3-16 cho ta thấy sự
phụ thuộc của kết quả lối ra vào khối lượng riêng của chất lỏng trong giếng, khối lượng riêng chất
lỏng trong giếng càng lớn thì dao động lối ra càng gần với trường hợp không có giếng. Hơn nữa,
không chỉ phụ thuộc vào chất lỏng trong giếng về khối lượng riêng, loại chất lỏng, kết quả thu được ở
hình 3-17 và hình 3-18 thể hiện sự ảnh hưởng của tín hiệu đầu ra vào vận tốc chất lỏng trong giếng.
3.3Kết luận chương và đánh giá phương pháp mô phỏng
Qua chương 3, Luận văn đã trình bày phương pháp mô phỏng một hệ vật lý với Comsol
Multiphysics. Cụ thể đã mô phỏng thành công sự truyền sóng SAW trên bề mặt chất áp điện, từ đó xác
định sự biến thiên dao động khi sóng truyền qua giếng chứa chất lỏng.
Nếu sử dụng các tính toán lý thuyết thì rất lâu mới có thể ra được kết quả như đã nêu, nhưng
với sự ưu việt của phương pháp mô phỏng, ta có thể mô phỏng được toàn bộ quá trình đó trong một
thời gian ngắn.
Tuy nhiên, quá trình mô phỏng còn nhiều thiếu sót. Điều đầu tiên là sóng không chỉ truyền
theo phương ta mong muốn, cụ thể sóng truyền theo chiều ngược lại, như vậy, khi gặp bề mặt vật chất
sẽ gây phản xạ, từ đó dẫn đến nhiễu trong hệ. Để khắc phục nhược điểm này có 2 phương pháp, một là
sử dụng vật liệu hấp thụ dao động không mong muốn (absorber), hai là mô phỏng một vật liệu có
chiều dài lớn đủ để trong quá trình khảo sát chưa có sóng phản xạ.
KẾT LUẬN CHUNG
Luận văn tập trung vào việc mô phỏng một đầu phun mực, từ đó tìm ra hướng xác định sự thay
đổi của vật chất trong vòi phun mực. Qua đó dần từng bước đưa ra giải pháp xác định thể tích trong
đầu phun mực.
Việc xác định thể tích chất lỏng trong vòi phun là vấn đề đang được nhiều quốc gia, nhiều
phòng thí nghiệm trên thế giới nghiên cứu, mục đích là để điều khiển chính xác nhất luồng chất lỏng
chảy qua vòi phun.
Trong khuôn khổ của Luận văn chưa trình bày được quá trình trích xuất tín hiệu điện từ lối ra
và đưa trở lại để điều khiển luồng chất lỏng hoặc đưa ra các thông số cụ thể về chất lỏng trong ống
phun, nhưng đã nêu bật được một số mấu chốt quan trọng, xác định được tính chất của chất lỏng trong
giếng mà ảnh hưởng trực tiếp đến thế ra, dựa vào đó có thể tiếp tục nghiên cứu bài toán xác định được
sự thay đổi của chất lỏng trong vòi phun.
Luận văn đã đạt được kết quả sau:
Xây dựng thành công mô hình mô phỏng đầu phun mực thông minh
Mô phỏng được sự biến thiên dao động vật chất trong hệ
Trích xuất được tín hiệu điện từ lối ra
Thu được Video quá trình mô phỏng
Khảo sát được sự thay đổi của dao động trước và sau miệng vòi phun mực
Khảo sát sự phụ thuộc của tín hiệu lối ra vào các đặc tính vật lý của chất lỏng trong vòi phun
mực
Đặc biệt,luận văn đã mô phỏng được thực hiện với chất lỏng chuyển động trong giếng với 2
trường hợp chất lỏng chuyển động đều và dao động theo hàm sin.
Cho đến thời điểm này luận văn đã làm được hầu hết các chức năng ban đầu đề ra. Để tạo ra
một sản phẩm hoàn chỉnh trong tương lai luận văn tiếp tục phải hoàn thiện một số tính năng sau:
Xây dựng các khối, bộ phận thực hiện triệt tiêu sóng nhiễu
Khảo sát tín hiệu điện tại lối ra khi có tạp nhiễu trong chất lỏng, thay đổi về độ nhớt, thể
tích trong chất lỏng.
Cảm biến thể tích giọt mực dựa vào tín hiệu thu được.
References.
Tiếng việt
[1] Lâm Hữu Thực(2010), thiết kế và mô phỏng một đầu in phun mực gắn cảm biến, Đại học Công
nghệ.
Tiếng anh
[2] Comsol lab, Comsol multiphysics help, comsol 4.2 document.
[3] David Kay, Vanessa Styles and Richard Welford, Finite Element Approximation of a Cahn-
Hilliard-Navier-Stokes System, Department of Mathematics, University of Sussex - Brighton -
BN19RF - UK.
[4] Edward J. Shaughnessy, Jr (2005), Introduction to Fluid mechanics,Oxford University press.
[5] Groot wassink (2007), Inkjet printhead performance enhancement by feedforward input design
basedontwo-portmodeling,PhDthesis - Deft technology university - Holand.
[6] Hue P. Le (1998), Progress and Trends in Ink-jet Printing Technology, IS&T The Society for
Imaging Science and Technology.
[7] J.J.Campell and W.R.Jones (1968), A method for estimating optimal crystal cuts and propagation
directions for excitation of piezoelectric substrate waves, IEEE Trans. on Sonics and Ultrasonics, vol.
SU-15, No. 4
[8] Middelhoek, S., and S.A. Audet (1989), Silicon Sensors, New York Academic Press.
[9]Nguyen Tien Dat, “Sensing Inkjet”, University of Engineering and Technology, Vietnam National
University, Hanoi.
[10]Pham Van So(2007), Simulation fabrication of Piezoelectronic Printhead, master thesis-
Department of Materials Science and Engineering,SungKynKwan University - Korea.
[11]SamiFranssila,Introductionto Microfabrication,John Wiley & Sons Ltd.
[12]Stephen D. Senturia, Microsystem design, Kluweracademic publishers.
[13] Stephen beeby, MEMS mechanics sensor, Artech House




























