Embed Size (px)
Citation preview

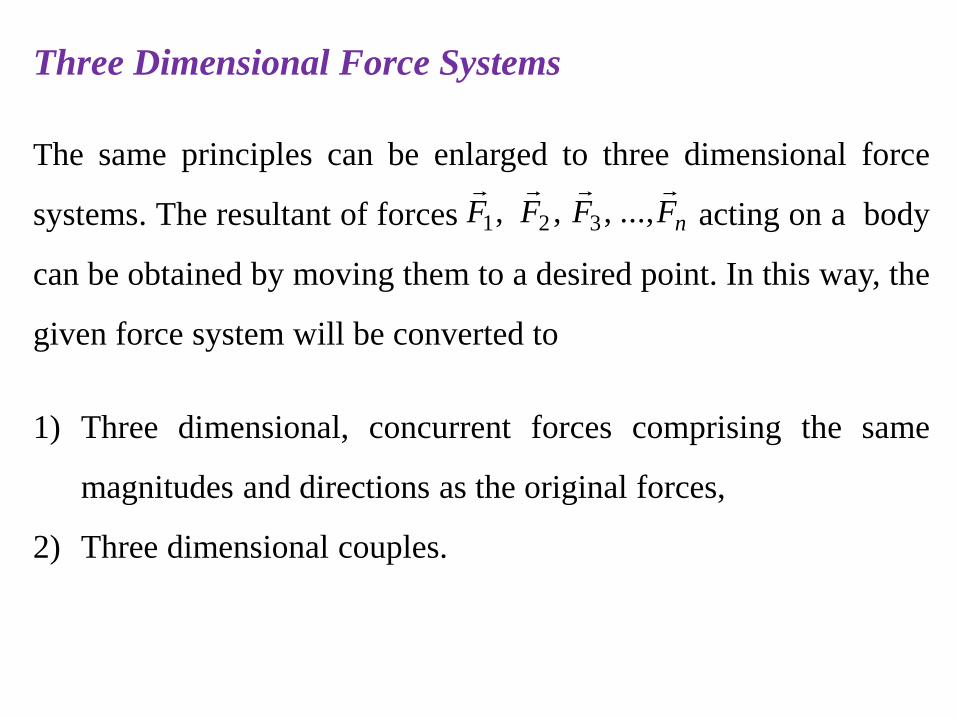
Three Dimensional Force Systems
The same principles can be enlarged to three dimensional force
systems. The resultant of forces acting on a body
can be obtained by moving them to a desired point. In this way, the
given force system will be converted to
1) Three dimensional, concurrent forces comprising the same
magnitudes and directions as the original forces,
2) Three dimensional couples.
nFFFF
...,,,, 321
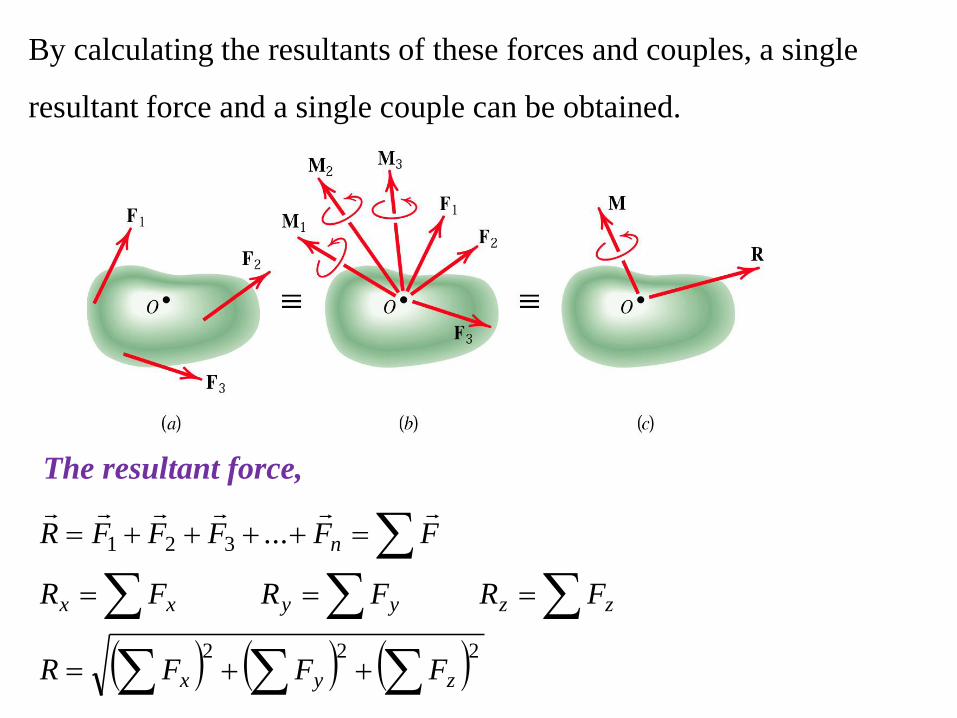
By calculating the resultants of these forces and couples, a single
resultant force and a single couple can be obtained.
The resultant force,
222
321 ...
zyx
zzyyxx
n
FFFR
FRFRFR
FFFFFR
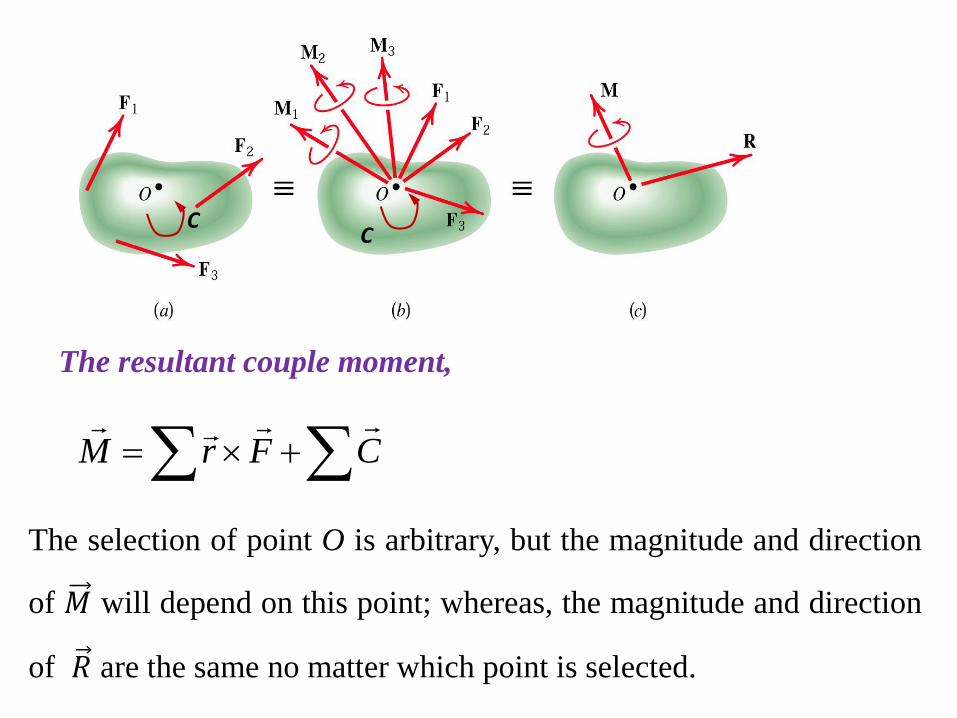
The resultant couple moment,
The selection of point O is arbitrary, but the magnitude and direction
of 𝑀 will depend on this point; whereas, the magnitude and direction
of 𝑅 are the same no matter which point is selected.
CFrM
CC
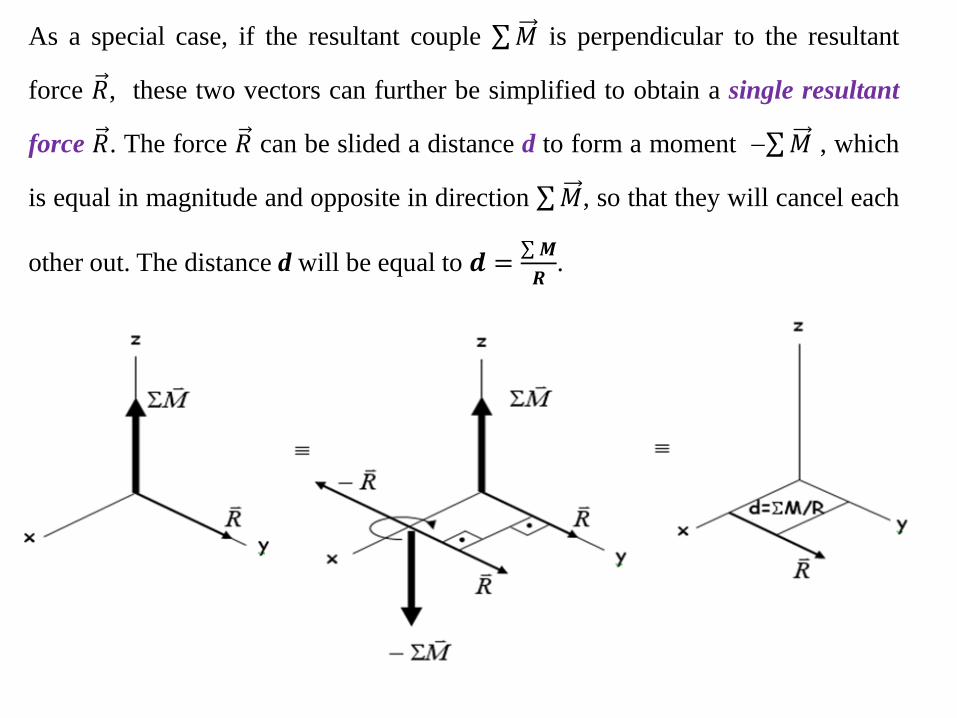
As a special case, if the resultant couple 𝑀 is perpendicular to the resultant
force 𝑅, these two vectors can further be simplified to obtain a single resultant
force 𝑅. The force 𝑅 can be slided a distance d to form a moment - 𝑀 , which
is equal in magnitude and opposite in direction 𝑀, so that they will cancel each
other out. The distance d will be equal to 𝒅 = 𝑴
𝑹.
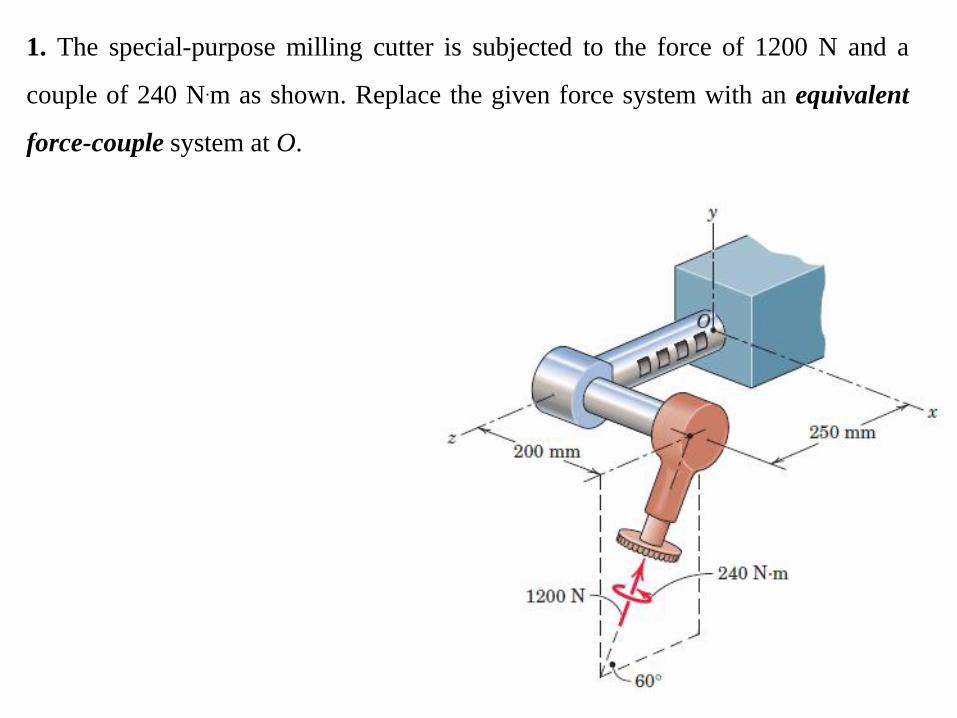
1. The special-purpose milling cutter is subjected to the force of 1200 N and a
couple of 240 N.m as shown. Replace the given force system with an equivalent
force-couple system at O.
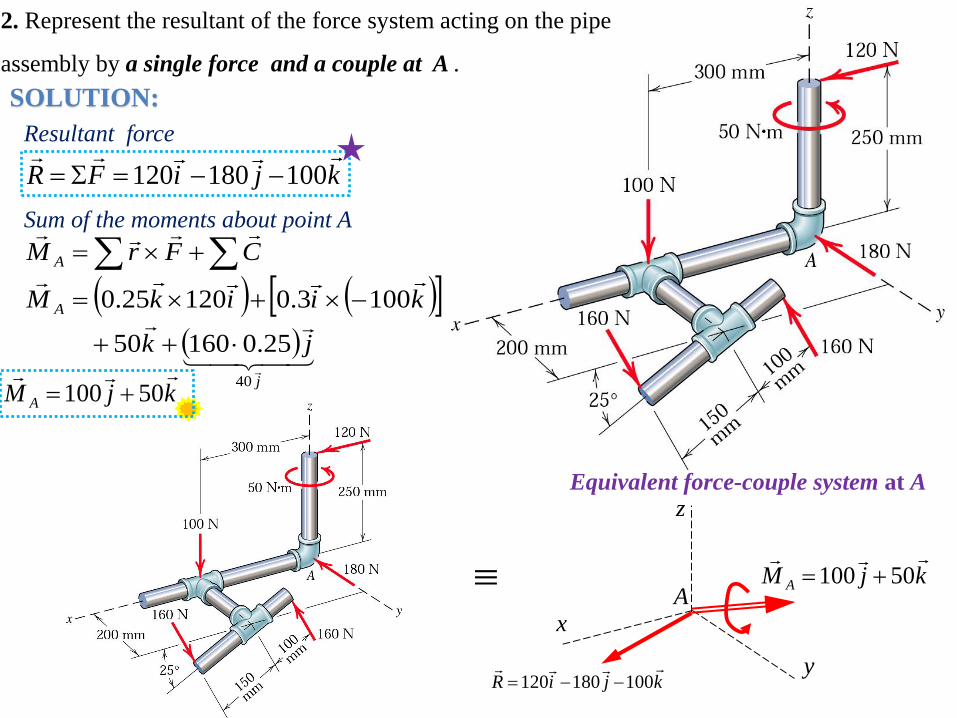
2. Represent the resultant of the force system acting on the pipe
assembly by a single force and a couple at A .
kjiFR
100180120 --
SOLUTION:
j
A
A
jk
kiikM
CFrM
40
25.016050
1003.012025.0
-
kjM A
50100
Equivalent force-couple system at A
A
y
x
z
kjiR
100180120 --
kjM A
50100
Sum of the moments about point A
Resultant force
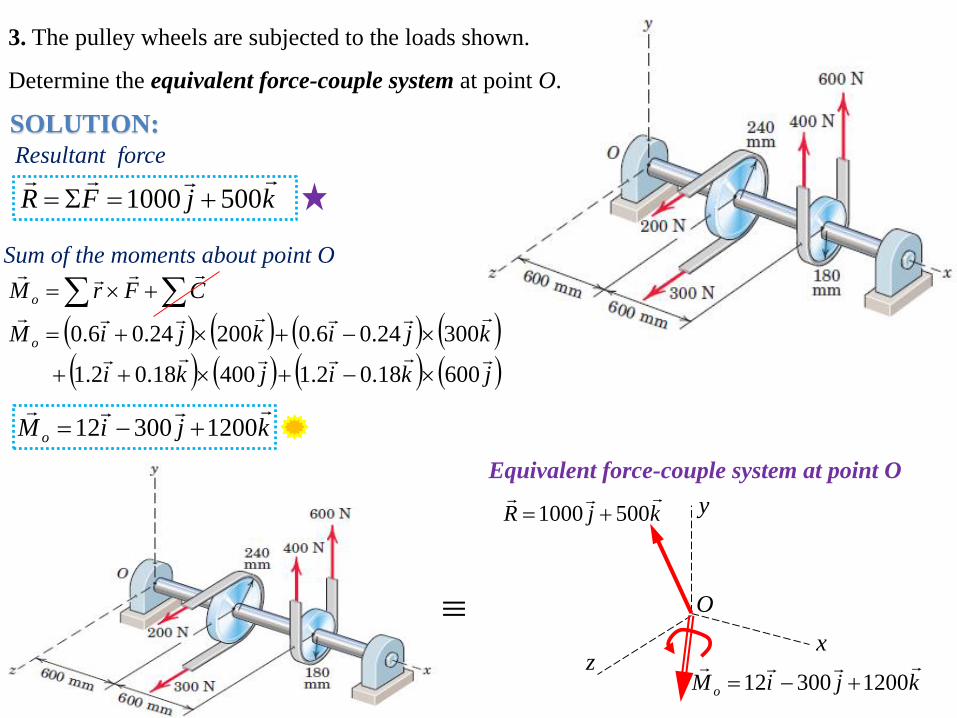
3. The pulley wheels are subjected to the loads shown.
Determine the equivalent force-couple system at point O.
kjFR
5001000
jkijki
kjikjiM
CFrM
o
o
60018.02.140018.02.1
30024.06.020024.06.0
-
-
kjiM o
120030012 -
Equivalent force-couple system at point O
O
x
y
z
kjR
5001000
kjiM o
120030012 -
SOLUTION:
Sum of the moments about point O
Resultant force
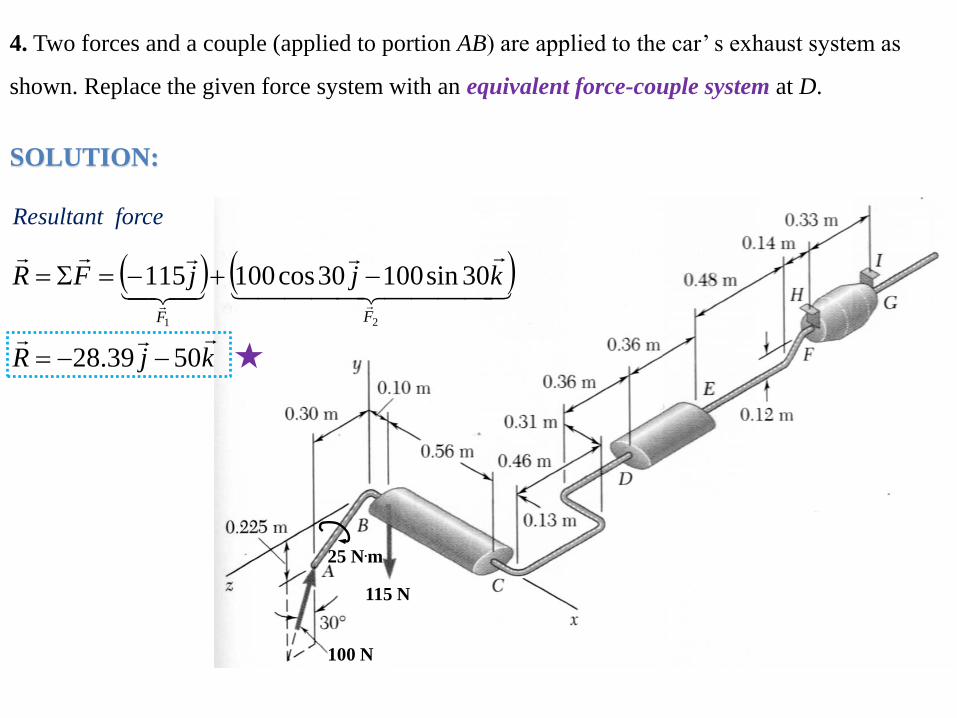
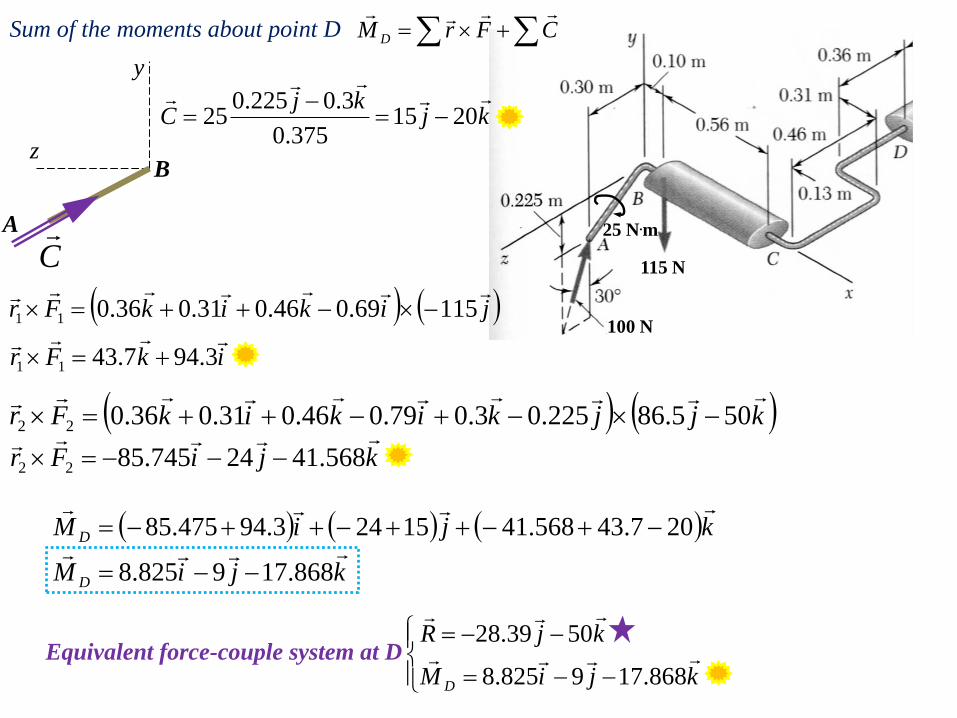
4. Two forces and a couple (applied to portion AB) are applied to the car’ s exhaust system as
shown. Replace the given force system with an equivalent force-couple system at D.
25 N.m
115 N
100 N
kjR
kjjFR
FF
5039.28
30sin10030cos100115
21
--
--
SOLUTION:
Resultant force
25 N.m
115 N
100 N
CFrM D
kjiM
kjiM
D
D
868.179825.8
207.43568.4115243.94475.85
--
----
kjjkikikFr
505.86225.03.079.046.031.036.022 ---
jikikFr
11569.046.031.036.011 --
ikFr
3.947.4311
kjiFr
568.4124745.8522 ---
y
z
C
kjkj
C
2015375.0
3.0225.025 -
-
Equivalent force-couple system at D
--
--
kjiM
kjR
D
868.179825.8
5039.28
Sum of the moments about point D
B
A
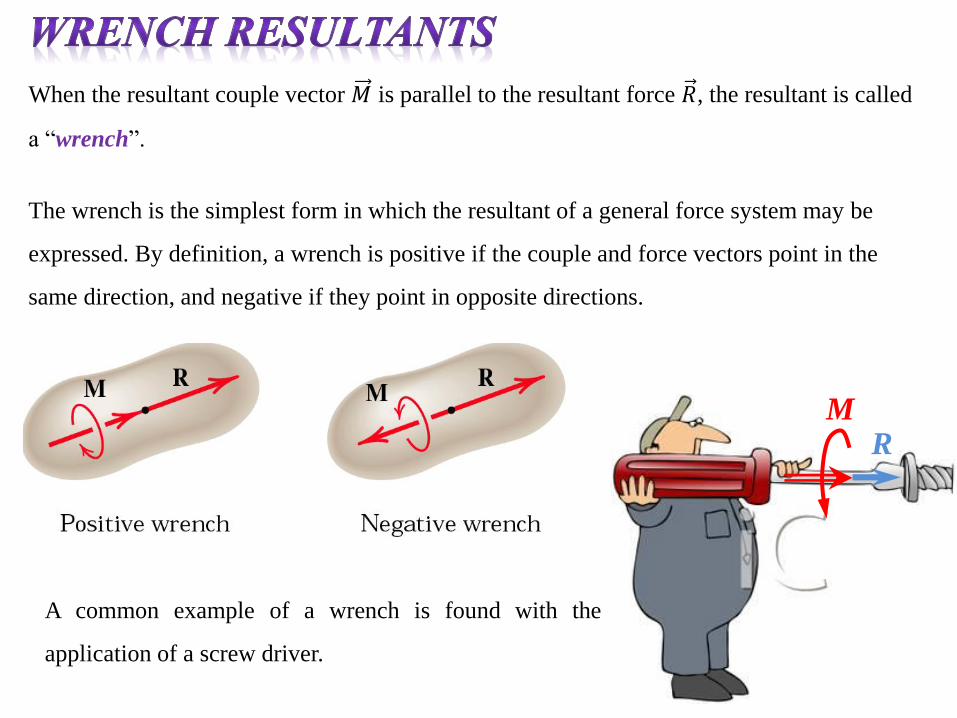
When the resultant couple vector 𝑀 is parallel to the resultant force 𝑅, the resultant is called
a “wrench”.
The wrench is the simplest form in which the resultant of a general force system may be
expressed. By definition, a wrench is positive if the couple and force vectors point in the
same direction, and negative if they point in opposite directions.
A common example of a wrench is found with the
application of a screw driver.
MR
//RR
RR//R
MMMM
nnMMM
-
2
1
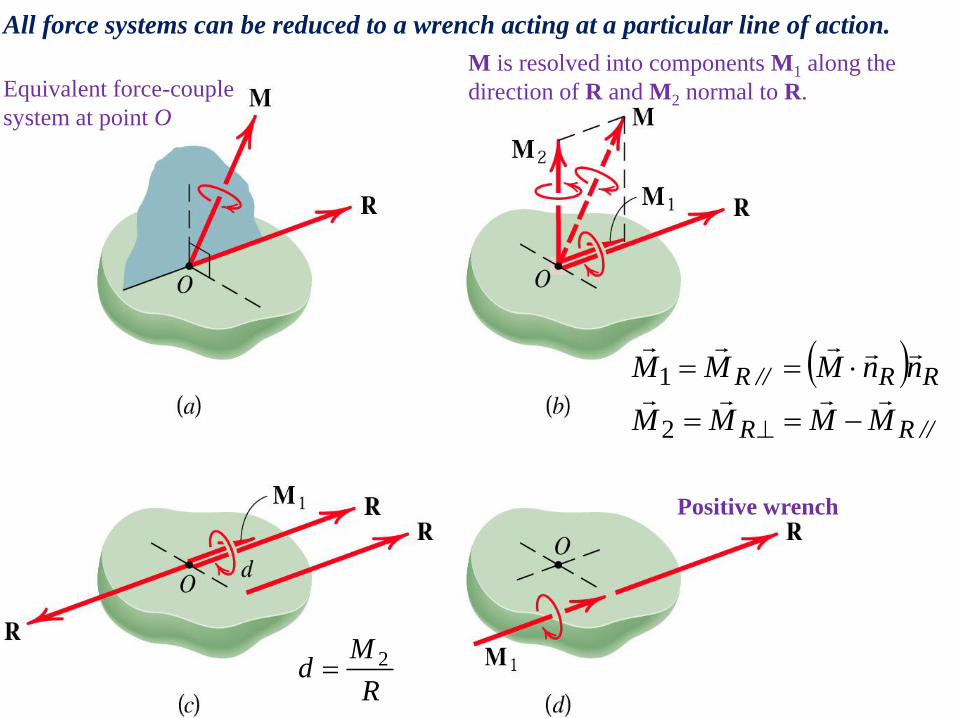
Equivalent force-couple
system at point O
M is resolved into components M1 along the
direction of R and M2 normal to R.
Positive wrench
R
Md 2
All force systems can be reduced to a wrench acting at a particular line of action.
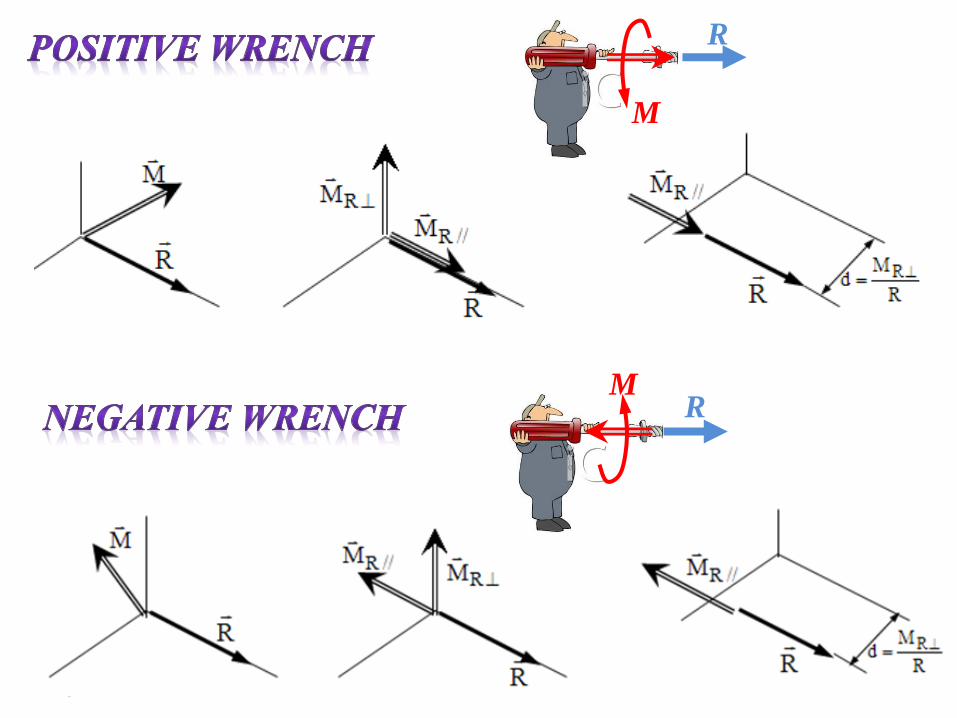
M
R
MR
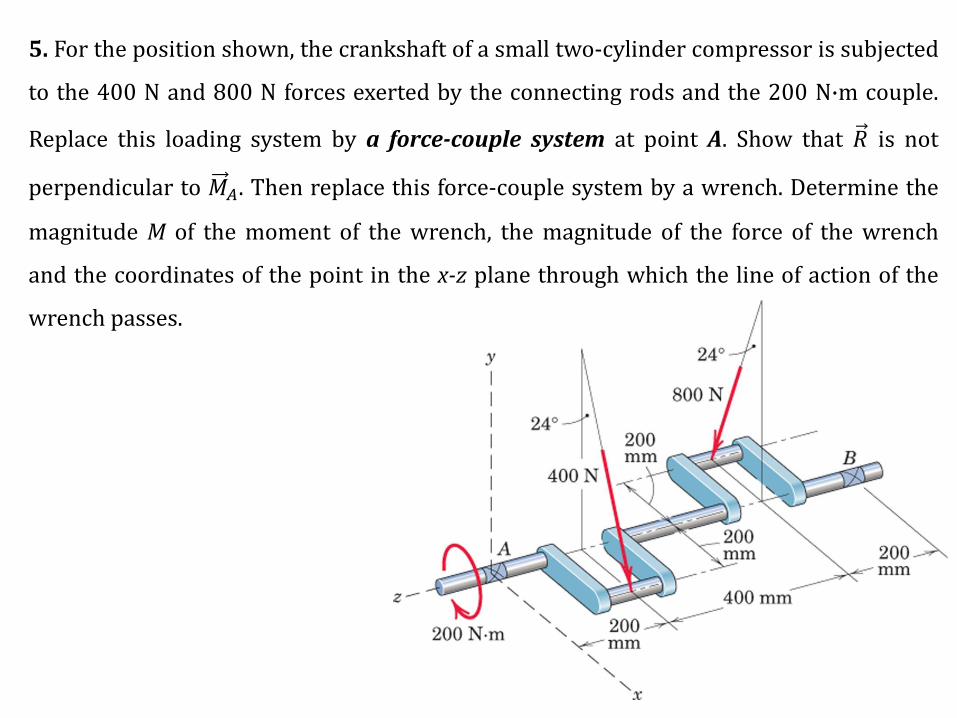
5. For the position shown, the crankshaft of a small two-cylinder compressor is subjected
to the 400 N and 800 N forces exerted by the connecting rods and the 200 N·m couple.
Replace this loading system by a force-couple system at point A. Show that 𝑅 is not
perpendicular to 𝑀𝐴. Then replace this force-couple system by a wrench. Determine the
magnitude M of the moment of the wrench, the magnitude of the force of the wrench
and the coordinates of the point in the x-z plane through which the line of action of the
wrench passes.
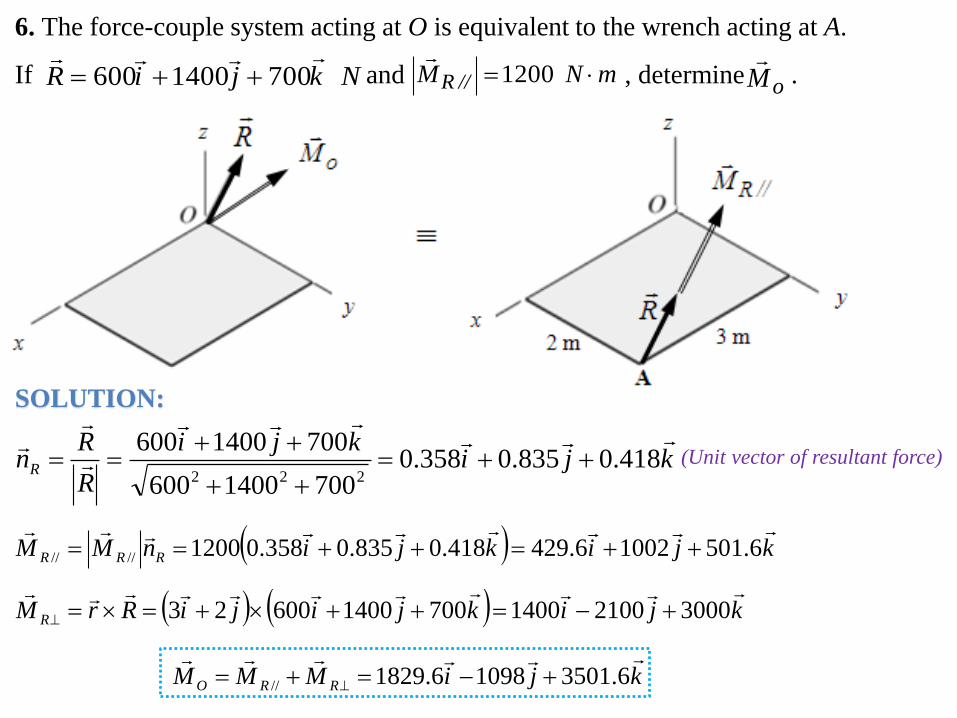
6. The force-couple system acting at O is equivalent to the wrench acting at A.
If and , determine . NkjiR
7001400600 mNM //R 1200
oM
kjikji
R
RnR
418.0835.0358.07001400600
7001400600
222
(Unit vector of resultant force)
kjikjinMM RRR
6.50110026.429418.0835.0358.01200////
kjikjijiRrM R
300021001400700140060023 -
kjiMMM RRO
6.350110986.1829// -
SOLUTION:
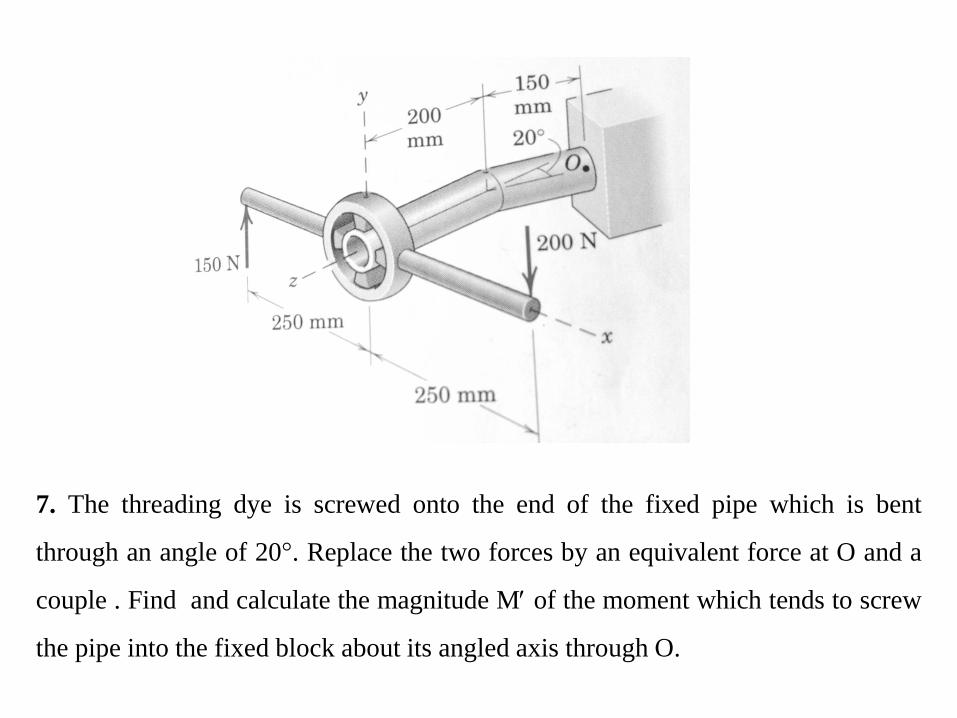
7. The threading dye is screwed onto the end of the fixed pipe which is bent
through an angle of 20°. Replace the two forces by an equivalent force at O and a
couple . Find and calculate the magnitude M of the moment which tends to screw
the pipe into the fixed block about its angled axis through O.
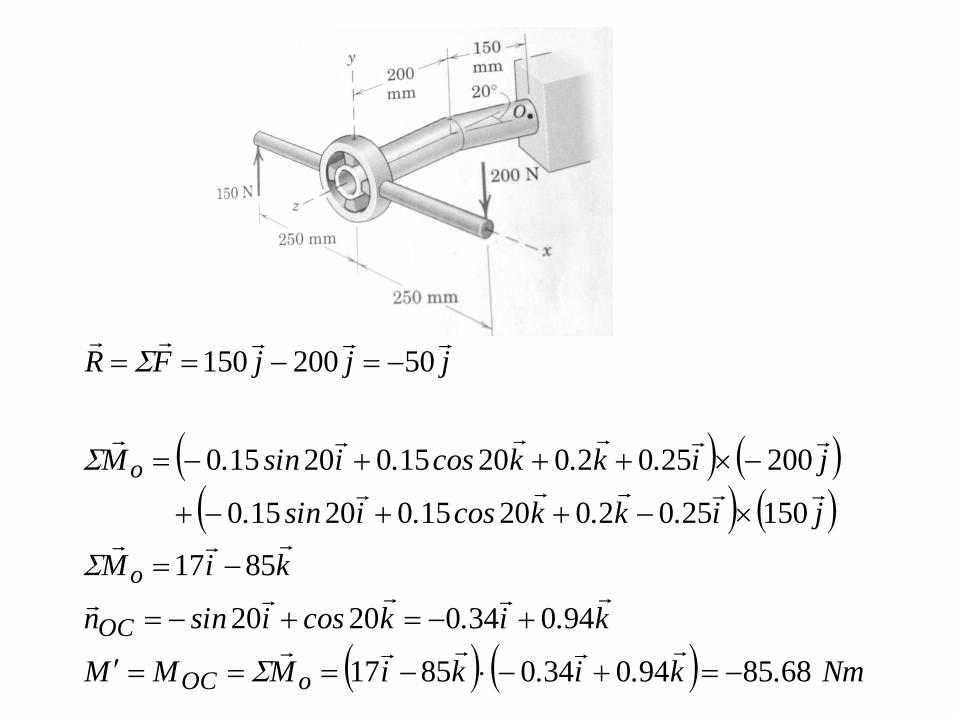
Nm.k.i.kiMMM
k.i.kcosisinn
kiM
ji.k.kcos.isin.
ji.k.kcos.isin.M
jjjFR
oOC
OC
o
o
68859403408517
9403402020
8517
150250202015020150
200250202015020150
50200150
---
--
-
--
--
--
y
x
500 N
1700 N
3400 N
3
4
qtan q
30 cm
50 cm
34 cm
50 cm
50 cmz
800 N.m
q
tan q15
8
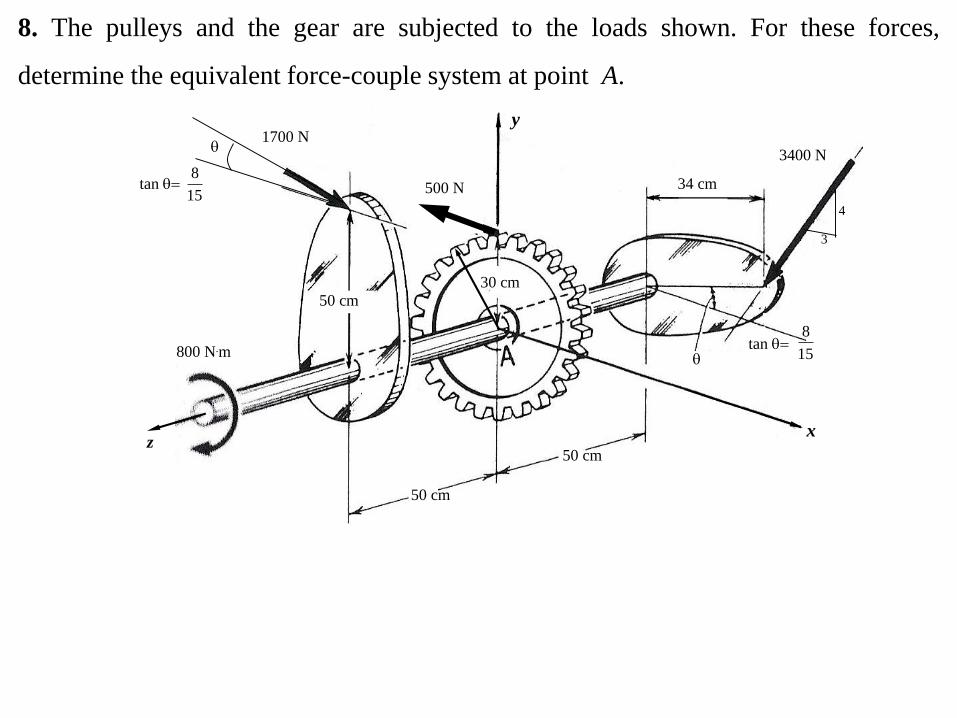
8. The pulleys and the gear are subjected to the loads shown. For these forces,
determine the equivalent force-couple system at point A.
15
8
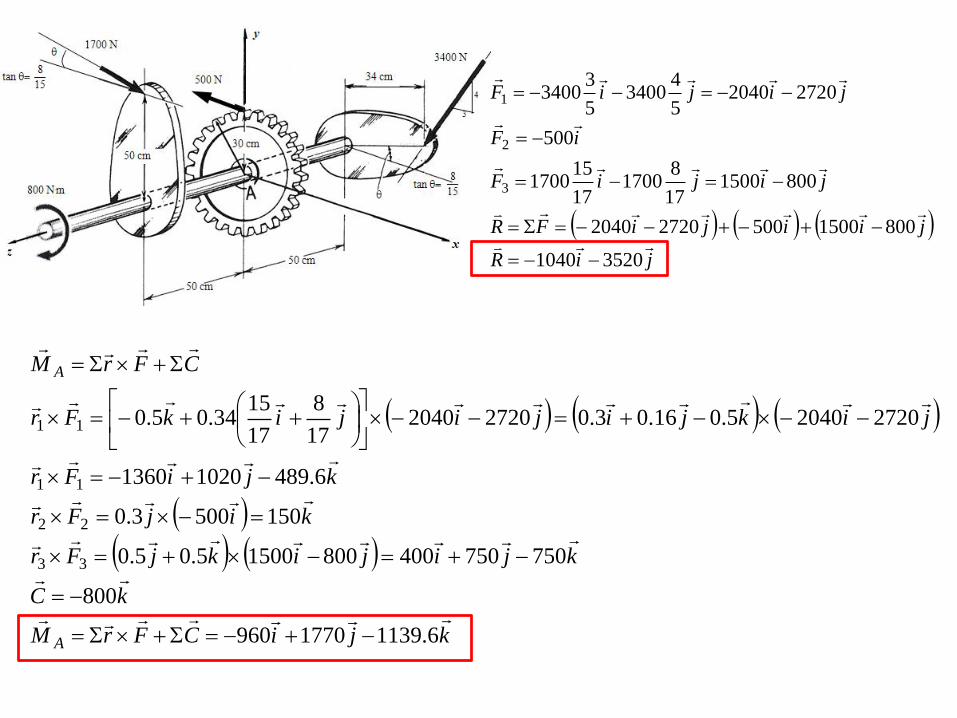
jiR
jiijiFR
jijiF
iF
jijiF
35201040
800150050027202040
800150017
81700
17
151700
500
272020405
43400
5
33400
3
2
1
--
----
--
-
----
kjiCFrM
kC
kjijikjFr
kijFr
kjiFr
jikjijijikFr
CFrM
A
A
6.11391770960
800
75075040080015005.05.0
1505003.0
6.48910201360
272020405.016.03.02720204017
8
17
1534.05.0
33
22
11
11
--
-
--
-
--
-----
-
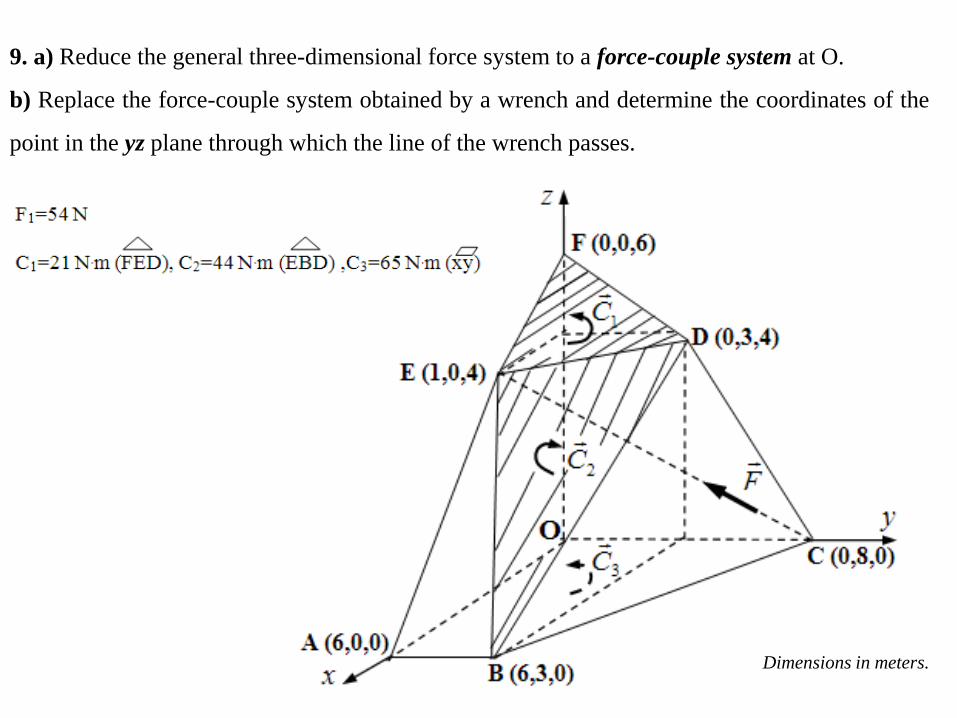
9. a) Reduce the general three-dimensional force system to a force-couple system at O.
b) Replace the force-couple system obtained by a wrench and determine the coordinates of the
point in the yz plane through which the line of the wrench passes.
Dimensions in meters.
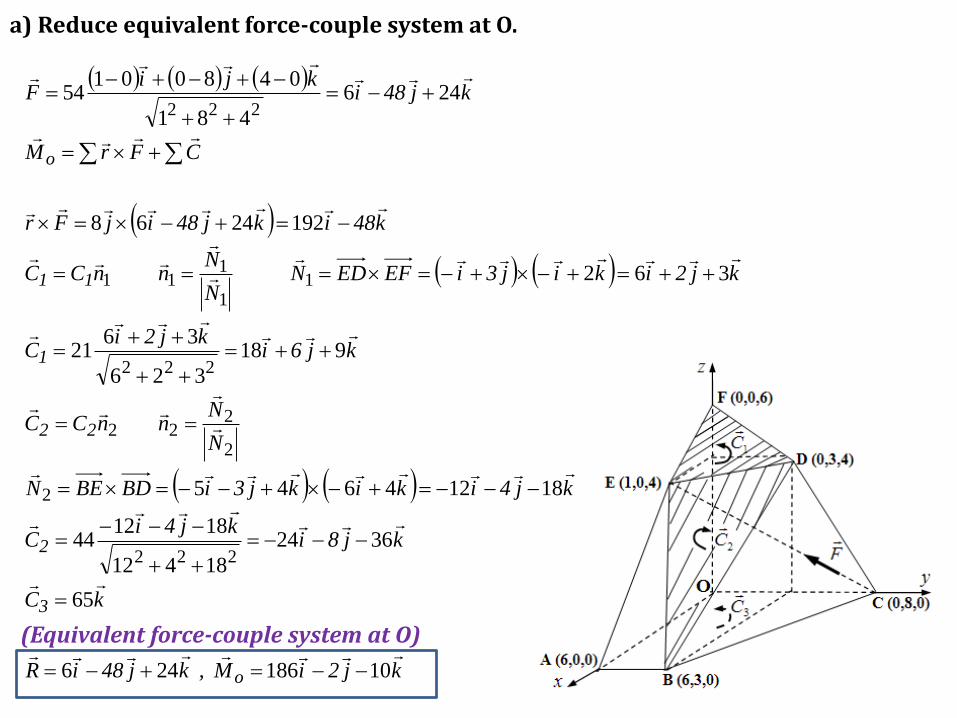
a) Reduce equivalent force-couple system at O.
kj2iM,kj48iR
kC
kj8ikj4i
C
kj4ikikj3iBDBEN
N
NnnCC
kj6ikj2i
C
kj2ikij3iEFEDNN
NnnCC
k48ikj48ijFr
CFrM
kj48ikji
F
o
3
2
22
1
11
o
10186246
65
3624
18412
181244
18124645
918
326
3621
362
1922468
246
481
04800154
222
2
2
222
222
11
111
222
---
---
---
------
--
--
-
---
(Equivalent force-couple system at O)
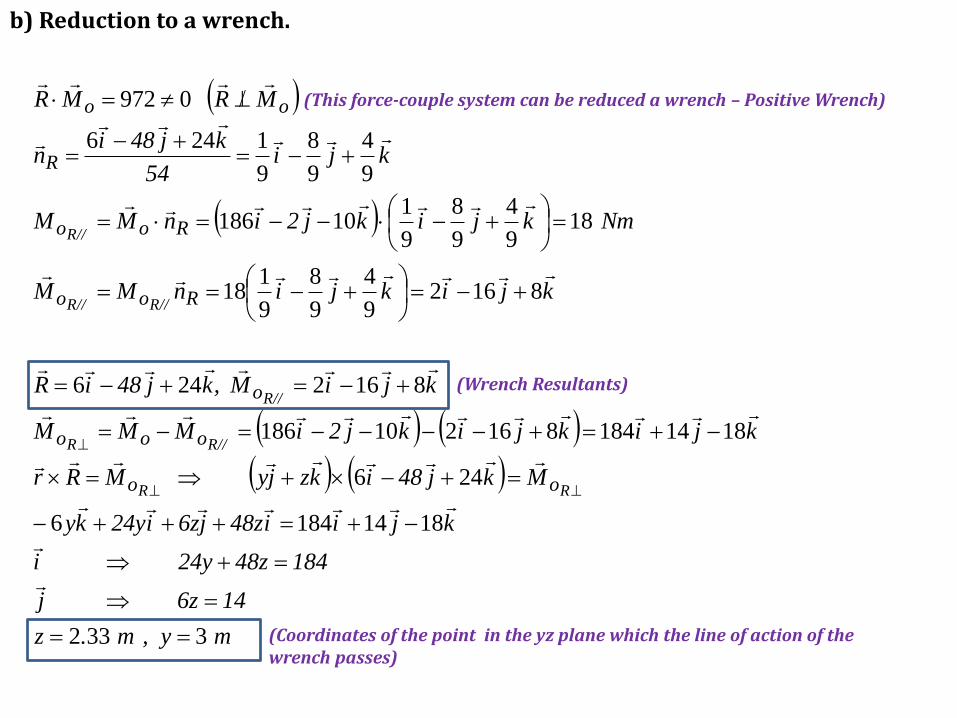
b) Reduction to a wrench.
my,m.z
146zj
18448z24yi
kjii48zj6zi24yky
Mkj48ikzjyMRr
kjikjikj2iMMM
kjiM,kj48iR
kjikjinMM
Nmkjikj2inMM
kji54
kj48in
MRMR
RR
R//R
R//
R//R//
R//
oo
ooo
o
Roo
Roo
R
oo
3332
18141846
246
1814184816210186
8162246
81629
4
9
8
9
118
189
4
9
8
9
110186
9
4
9
8
9
1246
0972
--
-
------
--
-
-
---
--
(This force-couple system can be reduced a wrench – Positive Wrench)
(Wrench Resultants)
(Coordinates of the point in the yz plane which the line of action of the wrench passes)
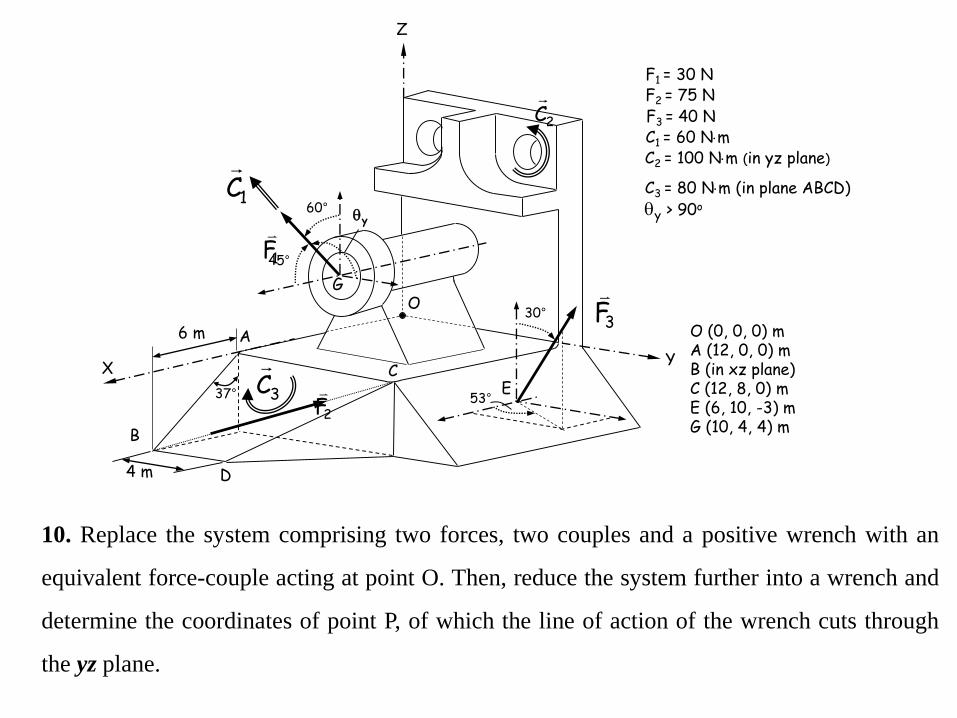
C3 = 80 Nm (in plane ABCD)qy > 90o
F1 = 30 NF2 = 75 NF3 = 40 NC1 = 60 NmC2 = 100 Nm (in yz plane)
O (0, 0, 0) mA (12, 0, 0) mB (in xz plane)C (12, 8, 0) mE (6, 10, -3) mG (10, 4, 4) m
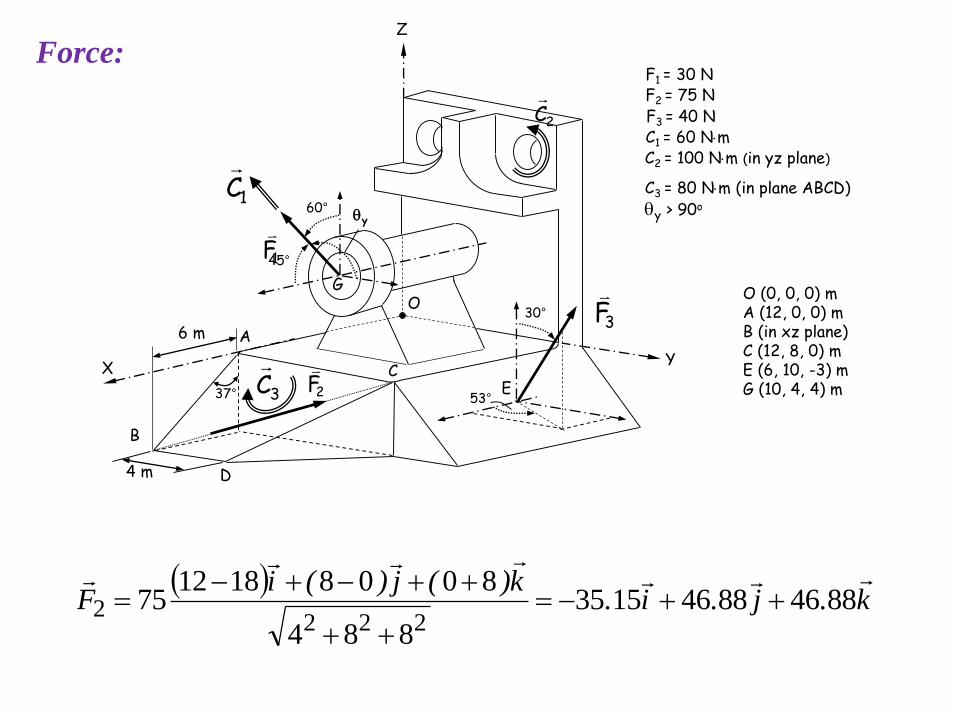
10. Replace the system comprising two forces, two couples and a positive wrench with an
equivalent force-couple acting at point O. Then, reduce the system further into a wrench and
determine the coordinates of point P, of which the line of action of the wrench cuts through
the yz plane.
A
B
C
O
D
E
G
37°
X Y
Z
45°
60°qy
53°
30°
6 m
4 m
1C
1F
2C
3F
3C
2F
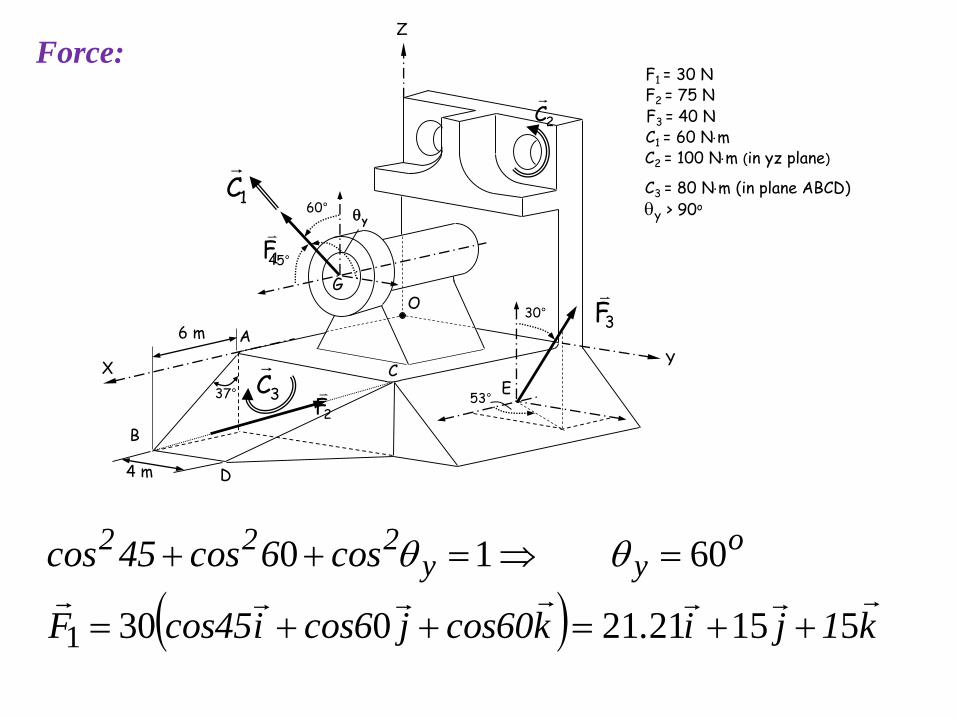
k1ji.kcos60jcos6icos45F
cos6cos45cos oyy
222
5152121030
6010
1
Force:
C3 = 80 Nm (in plane ABCD)qy > 90o
F1 = 30 NF2 = 75 NF3 = 40 NC1 = 60 NmC2 = 100 Nm (in yz plane)
A
B
C
O
D
E
G
37°
X Y
Z
45°
60°qy
53°
30°
6 m
4 m
1C
1F
2C
3F
3C
2F
Force:
C3 = 80 Nm (in plane ABCD)qy > 90o
F1 = 30 NF2 = 75 NF3 = 40 NC1 = 60 NmC2 = 100 Nm (in yz plane)
A
B
C
O
D
E
G
37°
X Y
Z
45°
60°qy
53°
30°
6 m
4 m
1C
1F
2C
3F
3C
2F
k.j.i.
k)(j)(iF
884688461535
884
8008181275
2222 -
--
O (0, 0, 0) mA (12, 0, 0) mB (in xz plane)C (12, 8, 0) mE (6, 10, -3) mG (10, 4, 4) m
Force:
C3 = 80 Nm (in plane ABCD)qy > 90o
F1 = 30 NF2 = 75 NF3 = 40 NC1 = 60 NmC2 = 100 Nm (in yz plane)
A
B
C
O
D
E
G
37°
X Y
Z
45°
60°qy
53°
30°
6 m
4 m
1C
1F
2C
3F
3C
2F
O (0, 0, 0) mA (12, 0, 0) mB (in xz plane)C (12, 8, 0) mE (6, 10, -3) mG (10, 4, 4) m
k.j.i.
...
k.j.i.
R
Rn
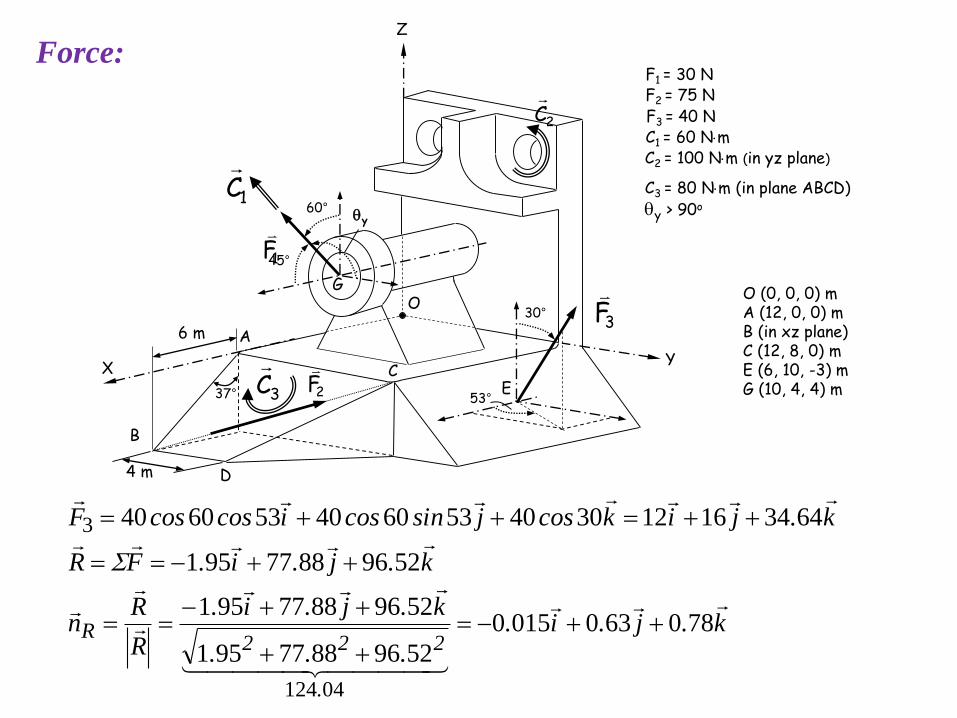
k.j.i.FR
k.jikcosjsincosicoscosF
.
222R
7806300150
52968877951
52968877951
52968877951
643416123040536040536040
04124
3
-
-
-
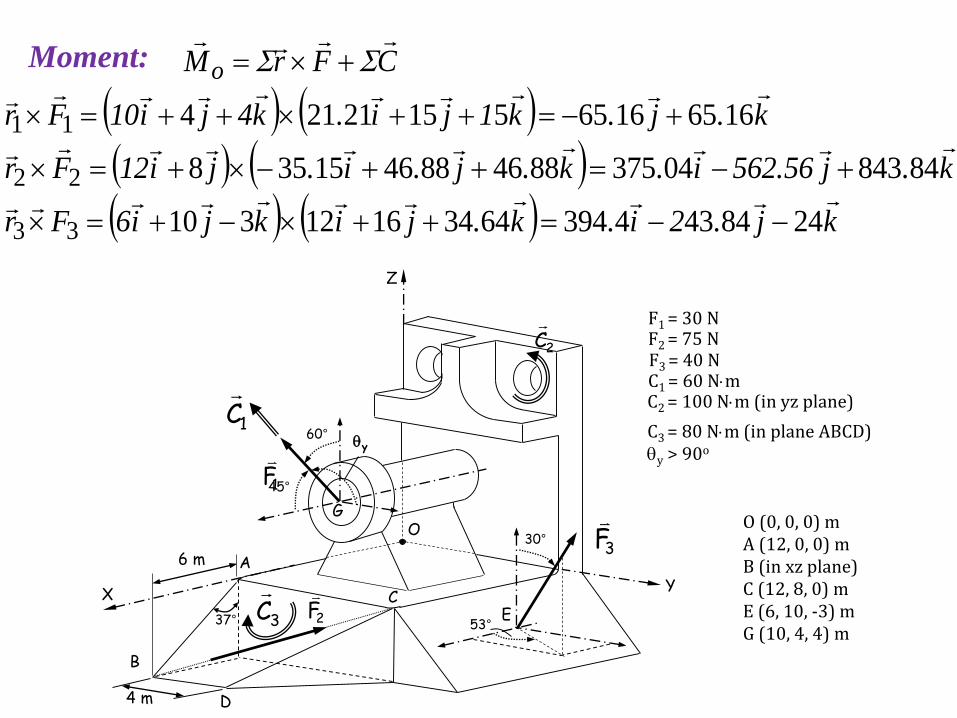
kj.2i.k.jikji6Fr
k.j562.56i.k.j.i.ji12Fr
k.j.k1ji.k4ji10Fr
CFrMo
248443439464341612310
84843043758846884615358
1665166551521214
33
22
11
---
--
-
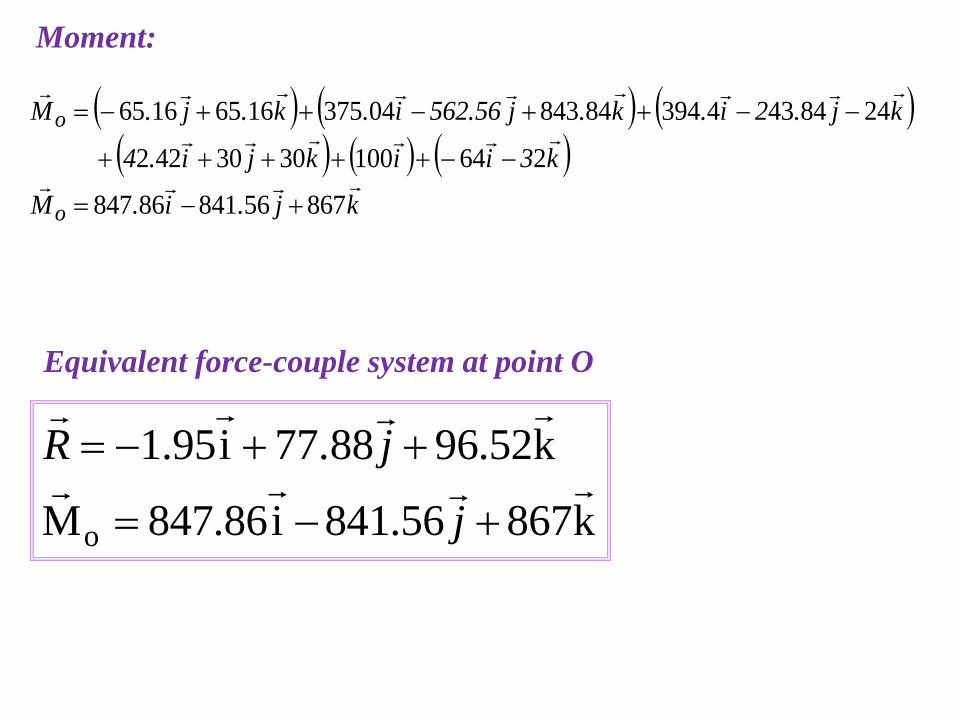
Moment:
C3 = 80 Nm (in plane ABCD)qy > 90o
F1 = 30 NF2 = 75 NF3 = 40 NC1 = 60 NmC2 = 100 Nm (in yz plane)
A
B
C
O
D
E
G
37°
X Y
Z
45°
60°qy
53°
30°
6 m
4 m
1C
1F
2C
3F
3C
2F
O (0, 0, 0) mA (12, 0, 0) mB (in xz plane)C (12, 8, 0) mE (6, 10, -3) mG (10, 4, 4) m
A
B
C
O
D
E
G
37°
X Y
Z
45°
60°qy
53°
30°
6 m
4 m
1C
1F
2C
3F
3C
2F
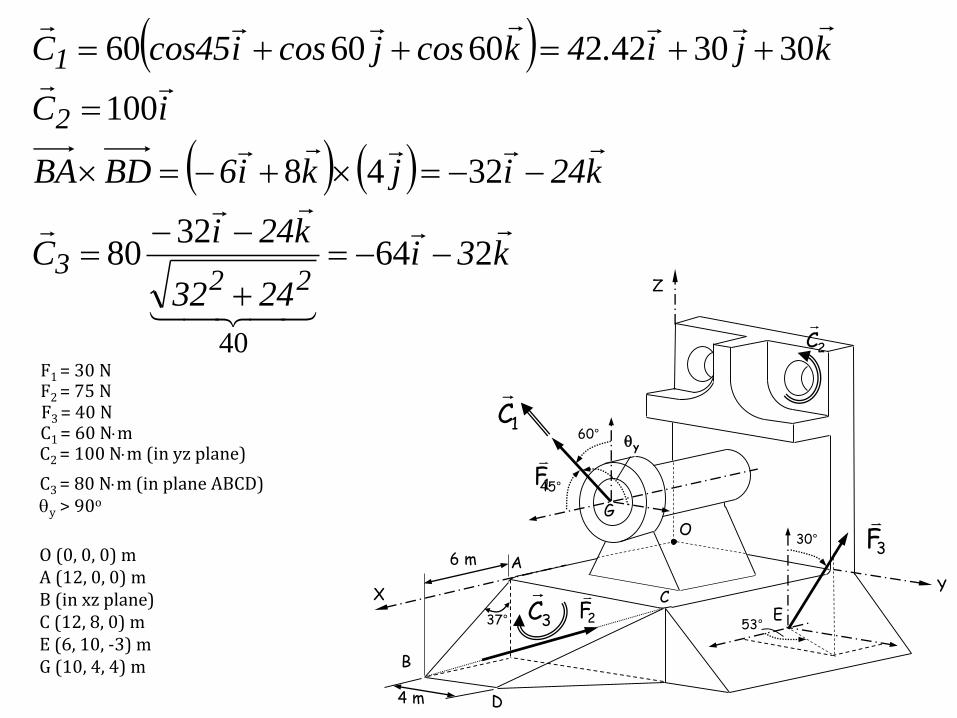
k3i
2432
k24iC
k24ijki6BDBA
iC
kji.4kcosjcosicos45C
223
2
1
26432
80
3248
100
3030422606060
40
--
--
---
C3 = 80 Nm (in plane ABCD)qy > 90o
F1 = 30 NF2 = 75 NF3 = 40 NC1 = 60 NmC2 = 100 Nm (in yz plane)
O (0, 0, 0) mA (12, 0, 0) mB (in xz plane)C (12, 8, 0) mE (6, 10, -3) mG (10, 4, 4) m
kj.i.M
k3iikji.4
kj.2i.k.j562.56i.k.j.M
o
o
8675684186847
2641003030422
2484434394848430437516651665
-
--
----
Moment:
k86756.841i86.847M
k52.9677.88i95.1
o
-
-
j
jR
Equivalent force-couple system at point O
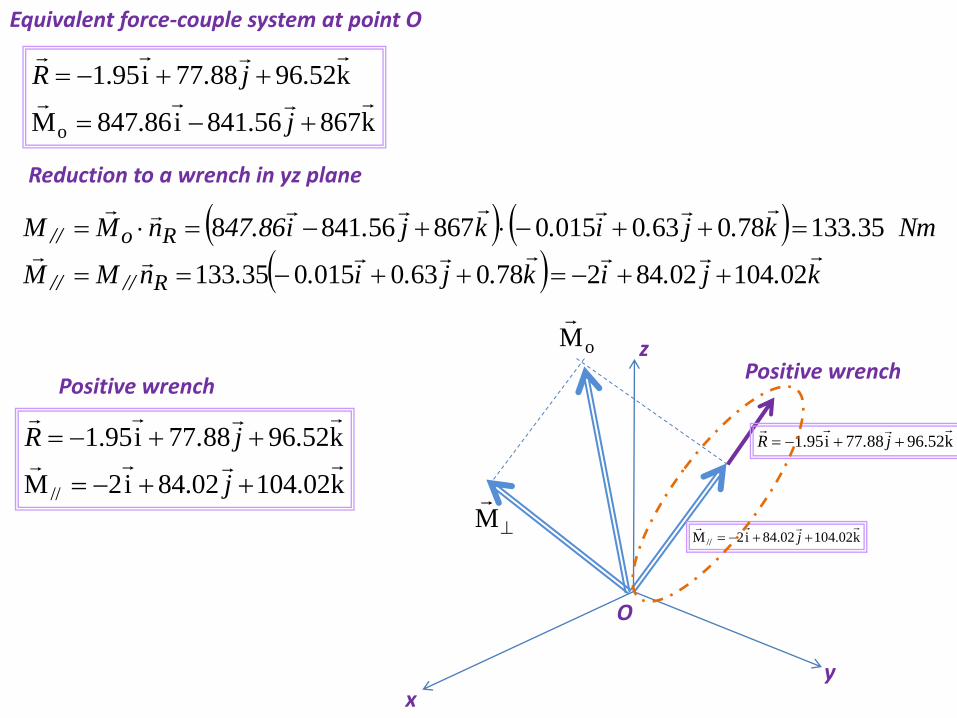
k86756.841i86.847M
k52.9677.88i95.1
o
-
-
j
jR
Equivalent force-couple system at point O
Reduction to a wrench in yz plane
k.j.ik.j.i..nMM
Nm.k.j.i.kj.i47.86nMM
R////
Ro//
0210402842780630015035133
351337806300150867568418
--
--
Positive wrench
k02.10402.48i2M
k52.9677.88i95.1
//
-
-
j
jR
O
xy
z
k02.10402.48i2M //
- j
k52.9677.88i95.1
- jR
oM
M
Positive wrench
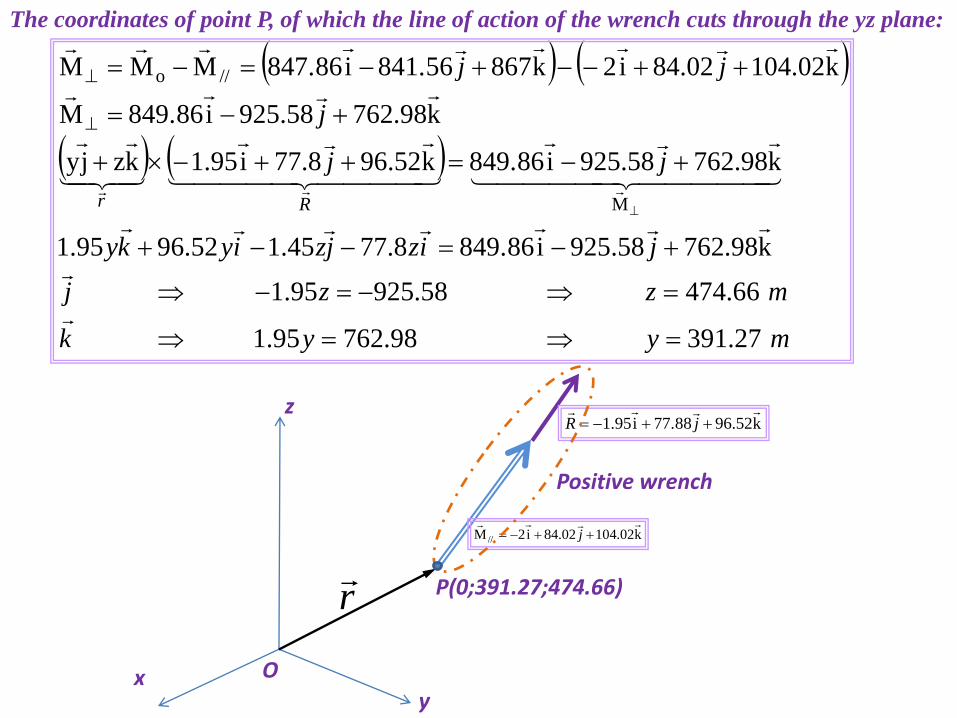
The coordinates of point P, of which the line of action of the wrench cuts through the yz plane:
myyk
mzzj
jizjziyky
jj
j
jj
Rr
27.39198.76295.1
66.47458.92595.1
k98.76258.259i49.8688.7745.152.9695.1
k98.76258.259i49.868k52.968.77i95.1kzjy
k98.76258.259i49.868M
k02.10402.48i2k867841.56i47.868MMM
M
//o
--
---
--
-
----
Oxy
z
k02.10402.48i2M //
- j
k52.9677.88i95.1
- jR
Positive wrench
P(0;391.27;474.66)r





























