-
■JI
to
V
W..--J U ouuueut IS UXil^UXtüä.
GENERAL PVNAMICS Convair Division
A?136 1 iREV 5-65
P -produc-d by the CLEARINGHOUSE
for Federal Scientific & Technical Information Springlii-ld
V« 2^151
f£\
-
Best Available
Copy
-
■ i
«/
*
A
Ic ( O N , V A 1 1 W ^i^ RFPORT ZU-T-M1 1 1 • »IVtS-ON Q»
0«h(«*(. O.SAM
-
AHM-rmm
0N9CKBOBV
C O N V A I R l»A«t 1 je NO. ZU-7-069^w
MOPCL. 7 OATB 16 Odt. 1996
FCREWCRD
The «olution for th« fluid forces on an oseillatlng cylindrical
tank as given in Reference (1) are for lateral tranelatory notions
alone. The present report extends the solution to Include tank
rotations about a transverse axle.
J
1
»
-
r ANALYSIS PftlPAKKO BY CMKCKEO BY mtvwcp mv
C O N V A I R « mitioa a» —Wu ■»•«■le» i
•AN pi>«e
PAmm -14 «IFORT NO. 2U-7i0^r.
MODEL 7 DATE 16 Oct. 1956
■• ^
TABLE OF COlfTPrrS
fiui FOREWORD 1
TABLE GF COOTEJITS 11
SUMURI Ill
Introduetloa 1
Nomsnolature 2
Analysis Ü
Conclusions 18
REFERENCES 19
APPMDIX 20
List of Syabols 21
■• —
■J» ,
-
f*? V *■ ■ vv % pc «. n»
AIMC1
CMBCKKO
C 0 H V A I R MM HM«
NVUNI NO. ZÜ-7-069 ' 7
©At« 16 Oct. 1956
(l
SUMMARI
Th« •olutloo to the problem of forced oecIllations of a fluid in
a ojliadricel tank undergoing trenelatione and rotations along and
about a tranereree axis through its base is found by an extension
of a previous solution for translations only (Referaooe 1). Through
the use of the LaPlace transform, the results are written in the
form of transfer functions giving the transverse force and moment
about the tank bottom for arbitrary planar motions of the tank.
Only the rundaneatal mode of fluid sloshing is eoosidered in
presenting ths final results and only small diaturbances are
admitted.
Solutions are presented both for a tank moving in a fiyd
acceleration field (as on earth) and in an acceleration field
oaryjed with the tank (as in a freely falling missile).
A mechanical analogy of a fixed BSBS plus a pendulous mass is
found to duplicate the forces and moments Identically in both the
fixed and carried acceleration field casss.
In an appendix, the equations of motion are developed for a
missile containing s large fluid tank through the use of the
hydrodynaalc transfer function. The resulting equations are shown
to coincide with those which would be obtained through the use of
the mechanical analogy.
*— »V. i
-
«MMM» € O N V A I * MM 1 ZU-7-069
» 7 OAT« 16 Oct. 1956
i i i ..I 111 i i
IHTRODXTIOW
A cylindrical tank, partially filled with a liquid, 1»
conaidarad to translata and rotata in an arbitrary nannar along and
about a tranaversa axli through its baaa.
Tha obj act of this report is to prosant a coitplet»
hydrodynaaio solution glTing tha forces and moaents on tha tank ae
functions of the tank Botioos. For applications to a nlssile
stability stody these results are glren in tha font of
action-to-force transfer functions and, alternately, in the for» of
a aechanical analogy.
-
PAO« 2
NO. ZU-7-069 7
OAT« 16 Oct. 1956
Ä
MOMENCLATORE
c, ^J
^^« *' ■ v^4 "^» ^p*.w««w \ f t ** •»v. \^~ 1
^ - force In x dlr«otlon - pounds
l/ - Be«sei function of first kind
** - tank paroMtor, fn h/a .
M - total fluid aaas - slugs
^n « hydrodynasilc sonant on tank - lb.ft.
p - hydrodynamle prassura - psf
3 - araa - feet2
r • kinetic energy - lb.feet u - potential energy - lb.feet a -
tank radiua - feet
f - acceleration of gravity - fpeZ
K - depth of fluid
- total fluid particle velocity i
- feet
f = \lui^iAZ*Wi - fpe
so - radial coordinate -feet
* - U Place variable - eec."1
t - time - sec.
"M a/ - fluid velocities in coordinate directions >t , P , B
respectively - fps
*>/* Z - cartesian coordlnatee
-s^i M * polar coordinates
«-r - acceleration in Z (axial) direction - fps2
A - coefficient of fluid node - feet2/i(
-
\*
MAVtmU pMPtmuoßt CHtCKKO av
C O N V A I R .MMM
Jm
P
fin
i t»i«*
WOMEMCIATURE (COHTIWOH))
root of Jt = 0
rotation of tank about Its base
fluid density
fluid node natural frequency
defined attenuating frequency
fluid velocity potential : a, * -Grad f
angle of pendulum with tank axis
angle of pendulum vith vertical (• r-9)
analogous fluid "angle" defined by equation (15)
analogous fluid "angle" defined by equation (18)
MO. ZU-7-069L . I 7
o*1» lh Oct. 1956
- BlugB/ft3
- sec. -1
BSC."^
feet2/sec.
«A. . i
-
ANAIA PRKPARCD
C O N V A I R ■MUi »niAaKi •AN niao
RCVtWCO »Y
HO. ro-7-o*0 7
OAT« X6 Oct. 1956
(>
I "
AHAUSIS
Htferano« (1) present» the «quations of motion end boundary
conditions for ft psrfsct fluid in a cylindrical tank having a
vertical axis and under- going an arbitrary lateral translation.
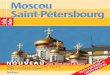
Choosing a cylindrical coordinate •ysten as in Figure 1, the
problem is shown to reduce to that of finding the Telocity
potential f (yi,0,z) satisfying LaPlace's equation and subject to
the boundary conditions that
1} at the tank walls the fluid particle velocity mist equal that
of the wall and that
11) at the free surface
dt* T dZ O
whore «x is the acceleration in the Z direction.
For the case of the tank which also undergoes a rotation 0 about
a tranaverse axis through its base, the complete mathematical
statement of the problem is contained in the following
equation«:
all + - d*t . az = o (i)
-a dst.
- (Oi +*,) COS (p (2)
>t, »a
-or = j 5« ia»o
si 6 COS $ (3)
B- O
di '«■'d*
m 0 U) 'M'h
In equation U), 0cr la the acceleration in the carried Z
direction.
-
■• I ■ * "IT *'— — 1-
ANALVMB PHtPAHKO wr
nwvmKo tnr
"l •. 7. . "
C O N V A I R Mal 5 ^ r ^ RKPORT NO. ZÜ-7-06^
MOO«. 7 DATI 16 Get. 1956
N 4 \
^
FIGURE 1
FROBUH COCRDIMATES * DIMIMBIOiS
••I»«
-
ANALYM C O N V A I R «AM 6 & . PRtFAAED BY * M«M •# •••fc
«»■»■« •-»««»• REPORT MO. ZÜ-7-06S
KAN DltOD * I CHICKBO «Y MOOCl. 7
iv OAft 16 Oct. 1956
Follovlng th« lead of Raf«ranee (1) a solution 1« sought in ths
for» of s ssriss of products of Bsssol snd Hyperbolic functions. By
a trial proosKS. the following potential function is found to
satisfy equations (1), (2) and (3).
^-IBB^-X)^ coa ^ *Yt*n d, (%1)co5 it C0Sh A
v / 4L* n ' \Q- / cosh ■^A- •
v- mMl -• . !^ Mil ^. a
Hare Jf is the Beesel function of the first kind of order one,
and the $ n are the roots of J^ = 0. In satisfying the boundary
conditions represented by equation (3), use has been made of the
equality
A»/
t The undeterained coeffieiente zn in «quation (5) are found by
satisfying
boundary condition (l). Substitution of equation (5) into U)
loads to
where
a a. a
Here the tine derivative« have boon written in operational for»
through the use of the LaPlaee transfora. "
-
ANACVMI C O N V A I R
OMBCXKO BY mvtsco rr
«■■Mt »m •AN MMO
nwponr NO. ZU-7-0^
OAT« 16 Oct. 1956
^(k^^^j I 2 zn >^
CL
m V n
aU'
[z Cr J' v*) where J, C^n) = ö
Follovlng thm procedure as outlined, one obtains
m = n
-a^i. * - "2, f * Ct;
/i cos/z ijail
^(^'.^ßaiij^Q.o
SolYinf,
«tor. V - -^ (/ - -^^
(6)
Equation (6), when eubetituted back into equation (5)
(tranpforned) yields the desired potential function
h£.
n «- a
^^tö 4a J M .„.iofei^
(UZ-'MW r C05 «^
vSZnK a
cosh isz: (7)
UI»A
-
AHAUYim P«»FA«CD BY CM«CK«P «Y
C O H V A I R ■ •f
•MfOKOO
PAO* 8 NO. ZÜ-7-069, ,
MOOCL. 7 DATE 16 Oct. 1956
A wail-known proparty of the velocity potential Is that It Is
related to the disturbance (dynamic) pressure by*
* at
Therefore» fro» equation (7) the transformed pressure
disturbance Is
f—t^-u cos 4 '^it^tfil) i^*» * cosh
cosh
a.
-^^0 n ^^
>t ^J^t ■n. U*-*) WH cos t = a
lateral force Is then obtained by the Integral The
0 o
h .zrr
-
ANALYSIS c o • MMMM»
N V A I R
CHKCKKO SY
RKVISKO SY
ntPOKT MO. ZU-7-0^1
MOOKL 7 OAXK 16 Oct. 1956
Within each of the Bumatlons appearing In the shove expression
the terns for n greater than unity are negligibly small st all
sxcitlng frequencies excepting those near the higher fluid node
resonances. The relative iaportance of the higher node terms may be
Judged by the sucesssion of denominator factors ( fn "I )• The
first few of these are:
f/- / = 2.386
*/-' = 27.^6
?/-' ■ 71.85 /;-' = 136.01
Consequently, it is satisfactory to omit the highor mode terns
for most appli- estions. If this step is taken one may write
F (.4) '-^^M-^t. Z9K (j + C^ ^MA, 4, X, +6h. (^ +£ii) (9)
. .2 tanh. K. wh„. Ai. _ w^
r = 4 cosh K'"/
I - I-**
The moments shout the tank base, positive in the sense of
positive Q (Figure 1), due to dynamic fluid pressures are given
by
r^i-2* .a^ZTT
^ m/CJ ) "jf Ä a ccx5 ^ ^^iÄ*/0 j j ZV ^cos
-
AHALYmm C O N V A I R PAiM 10 PMSFAMtO BY
*m*m~fmHmi*wmm*m>m*n*, ntrotTT HO. ZU-7-069 CHKCKtO BY ****
0,*00 MOOCL 7 Mcvm» »Y DATE 16 Oct. 1956
If theee integrale are «vcJLuatod and the reeulte are apaln
reetrlctud to the fundamental mode terns, there le obtained
-sLGMhVr *D\
+ *, MK 6^ J-^J- JJTJ (10)
. . a ^ I Z+Kj sink K, -cosh K,
r. ^ ' 2 slnh. Kl - Ki
Equations (9) and (10) conprlee the major result Inasmuch as
they provide the desired force and moment transfer functions.
It is worth noting that the Integral of the dynamic pressure
normal to the tank ba ie is zero. Thus, the sloshing motion has no
Influence on forces In the Z (longitudinal) direction and the
inertial properties in this direction remain those of a rigid mass.
The integral of the uniform hydrostatic head h. over the base gives
the force in the Z direction as
FA- -MaLT (11)
•For the reader who may puttie over the choice of notations here
it is noted that the symbols were adopted to conform to those of
Reference 1.
in« »
-
ANAU MMPAftKO 0Y CMKCtUKO SV MVWKO BV
C 0 N V A I R •AN OtMO
PACK 11 ntpotn HO. 2U-7-069
Moon. 7 OAT« 16 Oct. 1956
Static flvjd Bttfita
Uhll« «quatlone (9)» (10) and (11) provide the tenk forces due
to tank eeceleretlons there aleo may be forces due to static
displacements of the tank« Two cases Bust be distinguished»
i)
b)
the acceleration field is carried with (rotates with) the tank,
being always in the Z direction. This case arises in the freely
falling missile whose acceleration is due to rocket motor thrusts
directed always in the longitudinal (s) dire tion. In this case the
fluid level tends always to follow the tank motion and hence no
static forces or moments are produced.
the acceleration field ie fixed. This case arises with the tank
oscillating in a teat stand on the ground. The static tipping of
the tank producea a disturbance pressure { ^ y/z & cos $ )
throughout the tank. Integrated over the tank surface this
disturbance pressure produce« a transverse force in the positive X
direction and a positive moment. The transverse force is exactly
cancelled by the horizontal conponent of the main hydrostatic base
pressure { z0 a, h, ) so that there results finally '
STATIC = 0
^ STATIC MA-t**i) e
(12)
Equations (12) must be added to (9) and (10) for the tank moving
in a fixed acceleration field.
ttMEiaiaiJ iMlflg
In preparation for the derivation of a mechanical analogy the
following rearrangement la made of the hydrodynamic solution.
First, the results are rewritten beret
F -
^
--d X./W--
-
AN ALI MKPARKO BY CHKCKCD BY BKVIUO BY
C O N.V A I R •AN ntoo
^AO« 12 NO. ZU-7-069
7 DAT« 16 Oct. 1956
L..JL
Here we hav« «rltt«B within the dotted box those additional
terms peculiar to the fixed acceleration field problesu
Now let
Z - - / 2 i\
where Lp-
-
ANAUVl PUfPAMO BY CHCCKV0 BY MVWKO «Y
C O N V A I R 1} NO. Z0-7-O6f
7 OAT« 16 Oct. 1956
.1
»? = - 4a ^^-^)-^^^(y^-^)
(21)
Equations (20) and (21) «xpreea the results in the desired form,
giving the forces as functions of the tank notion plus a fluid
"angle" whose equation of aotien is given by equation (19).
We aov proceed to determine the equations of motion for the
mechanical systen of Fig. 2.
*" TL
Pip. 2 - ANALOCOÜE MECHANICAL SYSTEM
As in the hydrodynamic probl«, two acceleration field eases are
porsible: a fixed field and a carried field. While the equations of
action are similar in these cases, their final rearranges^nts to
bring then into the form of equations (19) t (20) and (21) differ,
and hence we derive them separately for convenience.
The kinetic and potential energiee for the system of Fig. 2
wher. displaced in an acceleration field carried with the axes
are
i•«••-«
-
KHAUfam NtaPANBO «Y «HKCKCO BY
C O N V A I R PAOt U NO. Ztt-7-069
7 OATI 16 Oct. 1956
U =-j M,aT Lp fp2
Using LaGrange's equation, the forces and nocents and the squat
ion of notion in 'öp ars
F - -K^/W,) X -[^0ho v/W, (^-^] Ö -^ Lp fp (22)
■2T •• ^ - - [^o^o *■ H ^-^)] ^ - [HC* ^ ^■'H (VO ] ö
^/wf (h.-QL* rr
Ve + o) rp -r]* H*r*-} Q]
whsrs CO =
(23)
(24)
L,
Equation (2i) is already identical in form with the
corresponding hydrodynamlc rtion (19). If it is used to substituts
into equations (22) and (23) for
one obtains (transformed)
A = - ^!lxM0- ^QA^hQ-f M^j Vp
a- z ~ -Tri*-^ -x-A^h^-*, 9 fak0* $*",{*,-QoLTrp
(25)
(26)
These equations are identical in for» with equations (20) and
(21) of tho hydrodynanie solution (less the tens in dotted box for
a fixed field). Coaparinf tern by tern, the correspondences listed
in Tabls 1 are found.
ra«M i«ii.A
-
ANALVWS PRCPARKO BY CHCCKBO BY RKvtMD mr
C O N V A I R ■AM OICOO
PAM 15 MO. ZU-7-Od5#.
MOOCL 7 DAT! 16 Oct. 1956
TABLE 1
AHALOGOUS MECHANICAL SYSTEM PARAMETERS CARRIED ACCELERATION
FIELD
MKHAWAIf HYDRODTNAMIC
^0 M (/->?,)
^0 '•(rV% W^j^, -^)
/l,-/-p /i^/^
^ *
ar/ü)z
^-^ K(I- SIX/ü)ZSJ
• thl» relationship 1« already satisfied idsntlcally by a
preceedlnp aauality, , we can show that / a / *
Bi/fi, ■ / -SI /O)
The analogous Bschanical syste» is thus defined. Equations {2A),
(25) and (26) are it« solution.
glad fltid" imtatom Satta The kinetic and potential ensrgles
are
I t.l» A
-
ANALYSIS MtKFAKCD BY CHCCKCD SY RKV1SKO SY
C O N V A I R 4 •nnio« er Mann, vnuam cetotma
•AM OIMO
FAOK 16 REPORT NO. ZÜ-7-069
MODEL 7 OATS 16 Oct. 1956
/ 1
y 1
i
4 w-j "or^o^-j^r^^-^fa-of]
Using LaGrange's equation the forces, aoments and equation of
swinging are found to be |
f=- (Mo+M) X - faho+M, (K, -Q] S -MfLßr,
^n* - fyo^o* M, ^/-^)] * -[MO^O+M, (^rrf ^ r0] Ö
-M^pChrL) Vp + fa^+M, (\-/^] ö +MlfLp tp
I ^'
*-p L J
where u) « OLT / Lp
SI9 « a.r/ ht-Lp
Since this last equation of notion Is not identical in fom with
equation (19), we nake a change in veriable. Let rp - ipp - G
saklng this substitution yields, In operational fom.
(27)
Equation (27) is now identical In font with equation (10. If one
next eliminates To ^OIn th« force and noment equations one obtains
finally
F - -J1 XM0 - ^*OM0 K0 tM, OLrPp (28)
^ - - -
-
1 ANALYSIS FRKPARBD BY CMtCKtD BY RCVIBBD BY
C O N V A I R » MriMM o» aurati »raMict c»i»ei4rtoa
•AN Dirao
PAGE I? REPORT NO. ZU-7-069
MODEL 7
DATE 16 Oct. 1956
These squatlons are now Identical in for» with the hydrodynsaic
solution for tho fixed field. Comparing tors by tens, the
eorrespondenoes shown In Table 2 are found, thereby defining the
desired meehanlcal analogy for the fixed acceleration field
problem.
TABU 2
ANALOGOUS MECHANICAL SIST EMPAWMETERS FIELD rpUSP
ACCIVSRATJOH
MBCHAMICAL HIDflODINAM^C
"o AiO -*,)
^0 ir£ -^/(J-^ A4, MA,
*%&to MK^O^e^
K, ^zs./*,
LP OLr/V*
* *. K (!~Sl*/ü)*)
•A^AO^A, "*&'j)
*theee relationships equivalences.
are already SLtlsfled identically by the preceedlng
It is interesting to note that the rigid portion of the
mechanical analogies are identical in both Tables 1 and 2 and that
the pendulums differ only In the height at vhloh they are located.
Because of t..© differences In their equations of notion howerer,
the dynamic forces produced by these pendulums cu identical in each
ease. It is only in the presence or absence of a static couple term
that the results differ.
-
ANALYWS
PREPARED BY
CHECKED BY
REVISED BY
C O N V A I R * •imion M antMi »»»«•ici •••MMTIM
•AN DIEOO
PAGE 18 REPORT NO. ZÜ-7-069
MODEL 7 DATE 16 Oct. 1956
CONCLUSIONS
1. Th« forc«B and BOBBnts produced on a tank of fluid undargoinp
arbitrary snail planar »otione hate boon derived, (eouationa 19,
20, 21)
2. Fbr the oaee of the tank morlnf in a longitudinal
acceleration field carried with the tank, the forces and monenta
are duplicated exactly by a BBchanieal syaten (Pig. 2) whose
parameters have been found (Table 1)
' and whose equations are given (equationa 24, 25, 26).
3. For the case of the tank moving in a fixed acceleration field
the forces and BOBeata are duplicated exactly by a mechanical
syster. (Fig. 2) whose parameters have been found (Table 2) and
whose equations are given (27, 2>», 29).
»
i i«i«*
-
ANALYSIS PREPARCD BY CHECKED BY REVISED BY
C O N V A I ft • SIVMIMi •* •lalMI. tTIMaiC« ODtfOMTIO«
•AN DIEOO
PAGE 19 REPORT NO. ZU-7-Otf^
MODEL 7 DATE 16 Oct. 1956
RETKRENCES
1. Kachlgan, K.f "Forced Oeclllatlone of a Fluid in a
Cylindrical Tank" Cowralr Report ZU-7-C46, Oct., Ut 1955.
-
ANALYtl« PRCPARED BY CHECKED BY REVISED BY
C O N V A f R A MTUio« or •■■»At »maici OOIMOTIM
■AN OIKOO
PAGE 20 REPORT NO. ZÜ-7-069
MODEL 7 DATE 16 Oct. 1956
APPENDH
APPLICATIGK TO MISSILE
EQUATIONS GP MOTION
rc«M wit-A
-
ANALYSIS
PRBPARKO BY
CHKCKKO BY
REVISED BY
C O N V A I R * Nviuoa m MaiMi nmiaic» CMWUTIM
•AN DICOO
PACK 21 ««ROUT NO. ZÜ-7-069
MODEL 7 '
DATE 16 Oct. 1^56
r
u T
STMBOLS PECOLIAR TO THIS SECTIOB
- trsBsrsrsc displacesient of wpty vsight missile e.g.
- distSBCB from SB»pty weight »isslle e.g. to base of fluid
tank, poeltive forward
- svpty vsight missils mass
- sspty weight missile inertia about the empty weight eg*
- rocket engine thrust
derivatives - aerodynamic and rocket engine moment and force
e
a.
6
V
- missile attitude
- missile angle of attack
- rocket engine deflection angle
- transverse displacement of effective missile e.g.
-
!
ANALYSIS mtPARCO BY CHICKED BY REVISED BY
C O N V A I R • Mvwoa or MIIIUI trataict —itt—
PAGE 22 BERORT NO. ZU-7-OÖ4
MODEL 7 DATS 16 Oct. 1956
AmJCATiow TO HireW «PAnowg g MOTlopi
Consldsr the olsells of Flg. A-l. The equations of notion will
be written for the empty weight Blssile center of gravity, treating
the fluid sloshing forces as though they were external forces of
known transfer function acting on the niaaile at the tank base
station»
EMPTY WEIGHr C.6.
FIG. A-1
Siua^Lng forces and au&aing Eomente about the e.g. gives
-4 Mg & = F„ OL + P4S + F "£?='*.
> (A-l)
y
where Ma , Mt, F^ , f4 are aerodynsBio and control moaient and
force derivativea.
I l«l»-A
-
ANACYM mncPAiuco mr Ct-KCKMD mr RKVMKO BY
C O N V A I R •AM OIIOO
PAOC 23 »BPORT NO. ZU-7-06!>
MODEL 7 DATE 16 Oct. J.956
How from equation« (19)» (20) and (21) v maj writ« the fluid
foroee ("cAiTled field«)
r =-^ fa * n e) M(I~A^ - ^SMh.f-~ 4* s ~GJI
+MA, OLT rP
^.~^(t*nS) Mh^+^-^y^eMSfa+Ot-e^
+ Mh. Bz OLT nF
where rF aetiefie« the equation
4 /- (f +t'Q\+^,Z eh\ I
Subetltuting into equation« (A-l) giTee
t
=[MhBt + MA, rlcLrrr + MiOL+fitf ,S
+ [M£*M((-/It)] *,* p
y*
(A-2)
(A-3)
(A-A)
(A-5)
(A-6)
II»!«-*
-
~.
.~ ,.
.,·· '1 '
··.,
"
.., .. .. ~.
.. ·
~ .
... '•
(A-7}
·-
,• T
•..:
. . ..