Embed Size (px)
Citation preview

1
Towards 6G Holographic Localization:
Enabling Technologies and PerspectivesAhmed Elzanaty, Anna Guerra, Francesco Guidi, Davide Dardari, and Mohamed-Slim Alouini
Abstract
In the last years, we have experienced the evolution of wireless localization from being a simple add-on feature
for enabling specific applications, to becoming an essential characteristic of wireless cellular networks, as for sixth
generation (6G) cellular networks. This perspective paper will revolve around the role of radio localization in all the
cellular generations, from first generation (1G) to 6G, and it speculates about the idea of holographic localization
enabled by the advent of large intelligent surfaces, made of metamaterials. Along this line, we briefly introduce the
current state-of-the-art of the available technologies, and we illustrate the road ahead with the inherent challenges
brought by this new technology.
I. INTRODUCTION
Beyond fifth generation (5G) cellular networks are endorsed by large available bandwidths, high frequencies, and
large antenna arrays. These features will allow not only high-speed communication but also high-accuracy wireless
positioning at an unprecedented scale [1], [2]. In this paper, we envision holographic localization as the future of
wireless positioning that will be characterized by the use of intelligent surfaces, made of metamaterials, that allow
the full control of electromagnetic (EM) waves, thus increasing the number of available degrees of freedom. As an
example, different propagation regimes of the electromagnetic fields (EMF) can be exploited to infer the position
information by controlling the EM waves generated or sensed by antennas or multiple devices. To corroborate our
vision, we first overview the applications and history of wireless localization, then we present our perspective about
the basic concept of holographic localization, enabling technologies, fundamental limits, and positioning algorithms.
A. Applications of Holographic Localization
We briefly present some potential applications that require high accuracy localization [3] and low-latency com-
putations and communications. In Fig. 1, an example of holographic localization enabled by intelligent surfaces is
depicted. As mentioned before, such large surfaces enhance the communication and localization capacity of next
generation cellular systems; and they can be used either in indoors and outdoors. For example, they are a mean for
Ahmed Elzanaty and Mohamed-Slim Alouini are with King Abdullah University of Science and Technology (KAUST), Thuwal 23955-6900,
Saudi Arabia, e-mail: {ahmed.elzanaty, slim.alouini}@kaust.edu.sa.
Anna Guerra and Davide Dardari are with the DEI/WiLAB-CNIT, University of Bologna, Italy, email: {anna.guerra3,davide.dardari}@unibo.it.
Francesco Guidi is with CNR-IEIIT, Italy, e-mail: [email protected].
arX
iv:2
103.
1241
5v1
[cs
.ET
] 2
3 M
ar 2
021

2
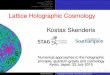
Fig. 1. Pictorial vision of possible future communication, sensing and localization. In this scenario, the intelligent surface in outdoor acts as
a passive reflector for assisting the BS in estimating the 9D location (position, orientation, and speed) of the user and vehicle. The indoor
intelligent surface in the warehouse is active and it enables holographic simultaneous localization and mapping (SLAM).
holographic mapping in industrial applications (indoor environments), and they can also be employed for assisting
autonomous driving and for enabling 9D localization (outdoors), as discussed below among other applications.
Industrial Internet of Things: Accurate positioning is crucial for exploiting the full potentials of sensors
and actuators in industrial internet-of-things (IoT) scenarios. Indeed, all things (e.g., sensors, machines, tools, or
human operators) can be equipped with tags and wirelessly connected to provide communication services and high
accuracy positioning for boosting the overall productivity and industrial efficiency. For instance, mobile robots
require accurate information about their location and the surrounding environment to properly navigate through
congested warehouses [4].
Simultaneous Wireless Information and Power Transfer: Sixth generation (6G) networks are expected to
foster systems equipped with near-pencil beam antenna arrays. Hence, there will be the possibility not only to
proficiently transfer information through the generated beams, but also to energize the devices through the same
communication link. Localizing with extremely high accuracy is demanded to properly focus the power transfer
and reduce the amount of wasted energy [5].
Intelligent Transportation Systems: Accurate positioning can help in enabling better traffic routing as well as
in the support of autonomous car and drone navigation through the avoidance of collisions enabling services such
as autonomous flying taxis [6].
Extended Reality (XR): Most of XR-based systems require accurate positioning. For example, one application

3
TABLE I
COMMON AD-HOC LOCALIZATION TECHNIQUES.
UHF-RFID UWB MM-Waves Li-DAR VLP
Typical Frequency 865-868 MHz 3.1-10.6 GHz 28, 60, 77 GHz 200 THz 400´ 790 THz
Typical Bandwidth 200 kHz ą 500 MHz ą 2.1 GHz - 150 MHz
Localization Technique RSS, PDOA TOA, TDOA TOA, TDOA, AOA TOA RSS
Coverage very small (ă 10 m) moderate (ă 100 m) moderate (ă 100 m) large (ă 500 m) (ă 10 m) tiny
Accuracy ă 5 m ă 10 cm ă 1 cm ă 1 cm ă 15 cm
Cost very low moderate moderate/high high very low
permits the users to modify the urban design by creating and removing parts of existing buildings. The repro-
duced illusion requires high localization and orientation-detection accuracy to provide the user with an immersive
experience [7].
Location-aware Communication Systems: Accurate positioning of mobile users can enhance the performance
of communication systems, which is often called location-aware communication [8]. Some main use cases are: (i)
the channel state information (CSI) can be efficiently estimated with reduced signaling overhead and hence latency
considering geometric channel models, when the location of the user and the scatterers can be accurately computed
[9]; and (ii) the radiation pattern of the antennas can be optimized to minimize the users’ exposure to EMF based
on the user equipment (UE) location [10], [11].
In the following, we briefly discuss the evolution of wireless localization and the key performance indicators
(KPIs) envisioned for 6G.
B. History of Wireless Localization
Wireless localization has been an essential service for several applications in the last decades [12]. In general, the
position of a UE can be estimated either at the UE (downlink positioning) or at the network-level (uplink positioning).
Different types of measurements can be considered for positioning, e.g., time-of-arrival (TOA) of the radio signal,
uplink time difference-of-arrival (UTDOA), time difference-of-arrival (TDOA), phase difference-of-arrival (PDOA),
angle-of-arrival (AOA), angle-of-departure (AOD), and received signal strength (RSS). Another localization method
is proximity, where the rough location of the UE is determined by the location of some reference entities (e.g., BSs
and anchors) in the proximity of the users. For instance, cellular ID (CID) and enhanced-CID (E-CID) techniques
fall within this category. The positioning platforms can be classified into three main groups: (i) cellular, (ii) ad hoc
terrestrial, and (iii) ad hoc satellite such as GPS system. In the following, we focus on the first two solutions.
Ad-hoc Positioning Systems: Different types of measurements can be considered for generating the geometric
shapes, e.g., TOA, TDOA, AOA, AOD, and RSS.
Recently, there is a proliferation of tailored solutions based on a large variety of technologies, spanning from
ultrasounds, ultra-wide bandwidth (UWB), millimeter-waves (mm-waves) towards visible light-based technologies,

4
TABLE II
CELLULAR-BASED LOCALIZATION TECHNIQUES AND KPIS
2G 3G 4G 5G 6G
Maximum Frequency 1900 MHz 2100 MHz 6 GHz 90 GHz 3 THz
Typical Bandwidth 200 kHz 500 kHz 20 MHz 100 MHz 500 MHz
Enhanced Techniques CID, assisted
TOA, OTDOA
CID, assisted
TOA, OTDOA
E-CID, UTDOA UAoA, Multi-RTT,
NR E-CID
Enhancing Previous Tech-
niques (e.g., assisted with
RIS and AI)
Localization Features LCS PE LPP, PRS NRPPa Joint Communication &
Sensing protocol
Use Cases ES ES ES ES, industry, logis-
tics, e-Health, aerial
Holographic 9D Localiza-
tion and Communications
KPI horizontal positioning error ă 100 m, 67% ă 100 m, 67% ă 50 m, 67% ă 10 m, 95% ă 10 cm , 99.9%
KPI vertical positioning error NA NA ă 3 m, 67% ă 3 m, 95% ă 10 cm , 99.9%
Positioning latency NA NA NA ă 1 sec ă 0.1 sec
e.g., light detection and ranging (LiDAR) and visible light positioning (VLP) technologies [13], [14]. A comparison
between the widely spread ad hoc localization techniques is presented in Table I.
Cellular-based Positioning: Cellular networks are designed mainly to support high-quality communications.
Only recently communication and localization have been jointly designed and this integration will be further
pushed in 6G mobile networks. By contrast, in past generations, positioning was considered as an add-on service
for communications. In fact, cellular systems can also provide location information for users, covering a wider
area compared to terrestrial ad-hoc techniques. Cellular-based localization has received high momentum by the
introduction of second generation (2G) motivated by the emergency services (ES), where mobile operators are
obliged to provide the location of the ES caller. Cellular positioning has evolved from 2G till fourth generation
(4G) with an increasing localization accuracy.
For 5G, KPIs identify seven positioning service levels (SLs), e.g., XR, industrial automation, and unmanned
aerial vehicle (UAV) control, with varying latency, reliability, and accuracy depending on the use case, e.g., the
accuracy spans from 10m to as low as 0.2 m [15]. 6G is envisioned to support higher positioning accuracy by
adopting higher frequencies (0.3 ´ 3 THz), larger bandwidths for position reference signals (PRS) (ą 500 MHz),
and an enormous number of antenna elements. The KPIs for 6G should meet the ability to perform 9D wireless
localization (i.e., 3D location, orientation, and speed) with low positioning error, short latency, and higher coverage,
compared to previous generations [16]. In 6G, localization, communication and sensing will merge much more than
in previous standards where these functionalities have been considered almost separately. Also, novel techniques can
be considered to improve the localization performance such as exploiting large intelligent surfaces, beam-spacing,
and artificial intelligence (AI) tools [1]. The main features of cellular-positioning for various generations, including
the KPI and 6G vision, are summarized in Table II.

5
II. HOLOGRAPHIC RADIO: ENABLING TECHNOLOGIES
Holographic localization is an aspect of the more general concept of Holographic Radio. In this paper, we consider
Holographic Radio as the ability to fully exploit the characteristics offered by different EM propagation regimes
obtained by an optimized control of radiating beams, e.g., beamfocusing. Generally, such control can be realized
through a flexible processing of signals at the EM level, and more specifically, through the use of large intelligent
antennas at the mobile or access-point side [17]. This is particularly important when using electrically large antennas
at high frequency (e.g., the millimeter wave or TeraHertz [2]), whose operating conditions may easily fall in the
Fresnel propagation region (radiating near-field), where the classical plane wave propagation assumption is no longer
valid. In this regime, the curvature of the EM wavefront offers the possibility to associate more information to the
wave with consequent improved communication capacity and localization performance.
In order to enable holographic radio, we need technologies that allow to achieve a full control of the EMF, thus
moving some of the signal processing from the digital to the EM level, achieving gain in terms of flexibility, lower
latency, power consumption, and complexity. Towards this vision, the introduction of metamaterials, i.e., materials
capable of offering properties not available in nature [18], used to realize intelligent surfaces for coating both small
and large objects, seems a viable and promising solution for the realization of the applications envisioned by next
6G, including holographic localization and smart radio environment (SRE) in general. In this way, these surfaces
become controllable (i.e., reconfigurable) and intelligent (i.e., able to convey the power towards the desired targets).
In the following, we briefly discuss about enabling technologies for holographic radio. Then, in Section III, we
discuss such ability to infer the position information, through a complete control of the EMF generated or sensed
by antennas or multiple devices, namely holographic localization.
A. Enabling Technologies
Intelligent surfaces can be mainly implemented through two techniques, i.e., reconfigurable metamaterials and
conventional discrete antennas. Metamaterials are currently in vogue and they are expected to play a prominent role
in the next years for the fabrication of reconfigurable intelligent surface (RIS). This emerging technology exploits
the possibility to dynamically and artificially adjust the physical properties, such as permittivity and permeability, of
the transmitted, received or impinging EM waveforms to obtain some desired electrical or magnetic characteristics
that in principle are not available in nature [19], [20]. To gain more flexibility, metamaterials are usually stacked in a
surface configuration, thus constituting a metasurface, that can be tuned to realize the desired wave transformations
[21]. Operating like this, radio waves can be shaped in a way that the reflected signals might not obey the Snell’s
law, but rather a generalized Snell’s law. According to this feature, technologies such as transmitarrays [22], [23]
and reflectarrays [24] have been proposed.
On the other side, discrete antenna solutions entail the adoption of antenna elements usually spaced apart by
sub-wavelength (e.g., half of the wavelength). In this case, each cell is equipped with an antenna and acts as an
independent unit that modifies the behaviour of the wave (that can be also reflected) in a desired manner (beam-
tailoring capability). When large intelligent surfaces are used actively and with the adoption of many tiny antennas,
they represent a natural evolution of massive multiple-input multiple-output (MIMO) technology.

6
RIS-based technology can be employed in different functional modes: (i) in transmission by modulating the
phases of the RIS elements; (ii) in reception when the RIS is equipped with a set of radio frequency (RF) chains;
(iii) in reflection when the RIS is used as a (passive) relay of multipath components and it controls the reflections
in real-time. In the following, we will discuss about these modes on details.
B. Intelligent Surfaces as Active Antennas (LIS)
RISs are simply referred to as large intelligent surfaces (LISs) when they are used as transmitter, receiver or
for both purposes. In this scenario, they can be interpreted as compact and low cost antenna arrays that might be
exploitable at the BS. Such antennas can be fabricated with either tiny antennas or metamaterial radiating elements
capable to actively communicate over a wireless link [25].
1) Active Dynamic Metasurface Antennas: The adoption of dynamic metasurfaces as active antennas, namely,
dynamic metasurface antennas (DMAs), has been proposed only recently, and it allows to control the transmit/receive
beam patterns with advanced hybrid A/D signal processing capabilities [25], [26]. Compared with conventional
antennas implemented by patch antennas and phase shifters, DMAs operate at low power consumption and cost,
while naturally implementing RF chain reduction without requiring dedicated analog circuitry but by exploiting
metamaterials located within wave-guides. The advantage of controlling the beampattern in the analog domain by
dynamically tuning the EM properties of the DMA elements is that it allows only a limited set of data stream to
be digitally processed. To date, current studies on near-field applications of programmable surface antennas have
mainly focused on the modelling of the EM wavefront for wireless communications [27]. Nevertheless, the discussed
technology paves the way for increasing the communication modes, and hence the capacity [28], together with an
expected high-accuracy localization service.
2) Reconfigurable Flat Lenses: When a reconfigurable EM lens is placed in front of a single transmitter/receiver
antenna, part of the signal processing is performed in analog through large surfaces [22], [23].
In this way, there is the advantage that the digital signal processing is dramatically reduced, as it is delegated to
the lens that operates in the analog domain. On the other side, the cost to be paid is a reduced flexibility, as only
one RF chain is connected to the antenna that collects the resulting signal after the lens processing. For source
localization applications, it has been recently shown the possibility to exploit such reconfigurable lenses to infer
the transmitter position through the curvature of the wavefront [23].
C. Intelligent Surfaces as Reflectors (RIS)
RIS can be also employed to ease and enable the wireless localization between the BS and multiple users by
acting as a mean to control the multipath, and they are also referred to as digitally controllable scatterers (DCSs),
since each element of the surface is treated as local scatterer. More specifically, RIS is intended as a nearly-passive
reflector that can be used to establish robust BS-UE links even in extremely harsh propagation environment, without
requiring increased power level or ad-hoc baseband processing [29]–[31]. Indeed, this is in principle different from
relays that are usually active or they require more sophisticated processing operations and they are more energy
hungry.

7
1) Dynamic Metasurface Antennas as Reflectors: To enable the capability to control the multipath, RISs are
usually realized with unit cells made of metallic or dielectric patches that can be modeled as a passive scattering
element. To preserve the energy and cost efficiency, each unit cell is equipped with some low power tunable
electronic circuits, e.g., PIN diodes or varactors, and sometimes there is the add-on of sensing elements (e.g., for
CSI). As an example, the results in [32] show that compared with regular relay-assisted architecture, the proposed
resource allocation for the RIS-based systems provide up to 300% higher energy efficiency.
2) Metaprism: It refers to a passive and non-reconfigurable metasurface that acts as a metamirror [33]. Its
reflecting properties are frequency-dependent within the signal bandwidth and they can be optimized at the BS by
proper frequency resource allocation to increase the communication and localization coverage even in situations
where the line-of-sight (LOS) is obstructed.
III. HOLOGRAPHIC LOCALIZATION
As previously mentioned, holographic localization is the capability to fully exploit the signal phase profile to infer
the position information. In other words, it refers to the possibility of recording a quasi-continuum measurement
profile through which the position or the orientation of a user is inferred. For example, when one uses an array
of antenna or a metasurface whose dimension is large enough to consider the surrounding users in the near-field
region, the phase profile of the impinging waveform provides sufficient information to estimate their positions. In
fact, the plane wave approximation is no more valid in the near–field and the spherical characteristic of the EM
wave brings all the needed information (ranging and bearing) for the position estimation. A useful characteristic is
therefore the curvature-of-arrival (COA) of the impinging EM wave [23], [27], [34]. To this aim, in the following,
we illustrate (i) the latest contributions on establishing the localization performance limits in RIS-aided scenarios;
(ii) the localization algorithms and their complexity.
A. Fundamental Limits for Holographic Localization
The localization performance limits provide a lower bound on the achievable estimation mean square error of any
(unbiased) localization estimator [35]. Such limits, typically based on Cramer-Rao lower bound (CRLB), provide
benchmarks for practical estimators and depend on various parameters, such as, for example, the adopted technology
(e.g., the operating frequency, the available bandwidth), the geometric scenario (multiple or single-anchor, with or
without RIS), the array geometry (linear, planar, circular, etc.), the presence/absence of a LOS link, the accuracy
and number of measurements, and the presence/absence of any prior information on parameters. Moreover, any
type of collaboration between nodes should be taken into account by these limits as well as the adopted waveforms
and codebooks, and the presence of synchronization and technological impairments. A survey on the CRLB for
classical positioning problems can be found in [36], [37] and, only recently, research on fundamental limits has
advocated the importance of considering near-field propagation induced by the use of large surfaces [30], where
the ultimate localization and orientation fundamental limits are derived in scenarios where RIS are employed as
reflectors. In [38], a closed-form CRLB solution is presented for a specific target position and for disk-shape RIS.
In [39], a RIS-aided millimeter wave OFDM downlink positioning problem is analyzed from a Fisher Information

8
perspective and the RIS resource allocation problem is then investigated for activating and controlling the phases of
the RISs. A similar analysis is conducted in [40] where a LIS based reflector and multiple subcarriers at mm-waves
are studied by evaluating the CRLB. Differently from above, in [41] the impact of the quantization error in RIS
phase and amplitude design is investigated.In [42] a three-dimensional RIS-assisted wireless localization channel
model is derived together with a CRLB for evaluating the estimation of absolute UE position in outdoor scenarios.
Finally, in [43], a single-anchor node using massive antenna array is used to localize a user with several antenna
elements, whereas in [34], the posterior CRLB is derived for a scenario where a moving source is track by a single
large antenna array exploiting COA.
All these papers have shown a performance enhancement in terms of positioning accuracy and coverage when
using RISs and the possibility of using a single node and narrowband signals for localization. Therefore, they can
be considered as a first step towards the concept of holographic positioning.
B. Review of Algorithms
Recently, a two-stage positioning method with dual RISs for a single user in mm-wave MIMO system has been
proposed [44]. In a first step, the angle information is estimated and then the phases of the elements of the adopted
RIS are optimized. In a second step, the positioning reference signals are sent from the user and received by the
BS via both the direct path and the RIS reflection path. The delay difference of the two propagation paths is
estimated by analyzing the cross-correlation of the received signals over the two links. The location of the user
is finally estimated according to the geometric laws. In [45] a RIS-aided multi-user localization scheme via RSS
measurements is proposed. The authors developed an optimization problem to minimize the weighted probabilities
of false localization, also called localization loss.
In [46] an indoor positioning application is considered and, thus, the UWB technology is proposed in conjunction
with the adoption of RIS for its ability to resolve multipath. In this case, a maximum a posteriori (MAP) approach
is used to derive the useful channel parameters (i.e., TOA and AOA) and the obtained results are compared with the
bound. The adoption of EM lenses is discussed in [23] where authors considered a maximum likelihood estimator
(MLE) approach for positioning that exploits the incident spherical wavefront. In addition, the analysis shows
the impact of multi-user interference, and it investigates also the possibility to exploit an EM lens together with
the antenna array/RIS in order to delegate part of the signal processing operations to the analog domain. On a
similar topic, [47] investigates a RIS considered as a lens receiver able to exploit the wavefront curvature (i.e.,
working in the near-field). The authors perform a Fisher information analysis, evaluate the impact of different lens
configurations, and propose a two-stage localization algorithm.
The performance of the aforementioned localization algorithms depends heavily on the RIS phase profile. In fact,
the phase shift induced at each RIS element should be adequately designed to improve the localization performance,
which can be obtained as a solution to an optimization problem. Several performance metrics can be considered
as objective functions that can be optimized to improve the performance of RIS-aided positioning systems such as
signal-to-noise ratio (SNR), CRLB on location and orientation estimation, and algorithm-tailored localization errors
[30], [40], [48].

9
71,4 (mm-1)
5 (degree-1)
137 (m)411 (m)
Low
0,01
0,10
1,00
10,00
100,00
1000,00Positioning Accuracy (at 10 m)
Orientation Accuracy (at 10 m)
CM-level Coverage (67.7%)CM-level Coverage (99.5%)
Computational Efficiency
Without RIS Zero Phase RIS Optimized Phase RIS
Fig. 2. Ultimate bounds on the localization performance for various architectures without and with RISs.
C. Example of Localization Performance with Intelligent Surfaces
As a toy example, we consider a single-anchor localization scheme in RIS-assisted environment. The CRLBs on
the position and orientation estimation errors are derived as in [30]. In Fig. 2, the performance of the following
schemes are considered: i) Without RIS: single-anchor localization without the help of a RIS; ii) Zero Phase RIS:
the RIS acts as an EM mirror obeying the Snell’s law, i.e., the phase shifts are all zero; iii) Optimized Phase
RIS: the RIS is designed to maximize the SNR according to the closed-form expression in [30, Section IV]. The
performance is indicated in terms of several metrics, i.e., i) positioning/orientation accuracy: the reciprocal of the
position error bound (PEB)/orientation error bound (OEB) obtained from the CRLB computed at a distance of 10 m
from the BS; ii) CM-level Coverage (67.7% or 99.5%): the maximum distance from the BS such that we are sure
by 67.7% or 99.5% that the localization error is less than 1 cm; iii) Computational efficiency: the reciprocal of
the computational complexity. We set the number of UE, BS, and RIS antennas to 4, 16, and 64, respectively. The
location of the RIS is pR “ p5, 5, 1q meters, while the BS is in the center.
We can see that the optimized RIS phase leads to higher position accuracy, orientation accuracy, and coverage
compared to the without-RIS scheme by factors of about 78x, 172x, and 12x, respectively, at the expense of an
increased computational complexity. These numerical considerations represent the first step towards putting in place
holographic localization in real scenarios.

10
IV. CONCLUSION AND FUTURE DIRECTIONS
In this Perspective, we have motivated our vision towards holographic localization, enabled by intelligent surfaces,
as an essential feature for next wireless networks. As highlighted throughout the manuscript, there are several key
research aspects that present unsolved issues, but the road ahead is promising and it is expected to nurture new
challenging studies towards the establishment of 6G. Moreover a joint communication and localization design
will open new opportunities in different applications spanning from complex high dynamic vehicular scenarios to
machine learning-based RIS control.
Thus, we list in the following some of the future directions and challenges in the investigation of holographic
localization with intelligent surfaces.
Finite Resolution Phases: In practice, RISs have a finite resolution to describe the possible induced phase shifts,
leading to a performance loss with respect to the optimized continuous phase shifts. Also, restricting the phase
shifts to a finite number of levels can significantly increase the optimization complexity. In this case, an exhaustive
search over all possible phase shifts may be required, leading to an NP-hard problem. A possibility will be to use
sub-optimal approaches that at first solve the problem with continuous phase shifts, and then they quantize the
phases according to the RIS resolution.
RIS Amplitude and Phase Coupling: The amplitude and phase of the reflection coefficients are coupled in
practical RISs architectures. Hence, they can not be independently designed. Moreover, there is a mutual coupling
between adjacent RIS elements, leading to a non-linear channel model that can further complicate the phase design
[49]. This aspect needs to be carefully accounted for in the design of holographic localization algorithms.
High Complexity Iterative Algorithms: The problem formulation of the RIS phase design usually requires an
initial rough position estimate for the device that needs to be localized. Therefore, the localization problem often
involves multiple iterations, where the estimated location of the device in the last iteration is used in the objective
function (e.g., SNR, PEB, and OEB) to compute the current optimal RIS phase design. This process should be
repeated iteratively until the algorithm converges to the actual location [49]. Therefore, there is a great challenge
of obtaining the position information with low overhead and extremely low latency.
Multi-Objective Function in 9D Localization: In general, we can not simultaneously minimize the position,
orientation, and speed estimation errors to achieve accurate 9D localization [30]. Hence, the phase design turns into
a multi-objective optimization problem, requiring more sophisticated algorithms. In this sense, efficient solutions for
the RIS phase design by optimizing multi-objective functions are still lacking. For example, some use cases require
that both the position and orientation errors should be minimized to provide the user with more rich experiments
such as augmented reality applications. Furthermore, some communication-based metrics can be optimized (e.g.,
the coverage, rate, and energy efficiency) besides the localization accuracy.
Ad-hoc Waveform Design: In general, for 9D localization, multiple waveforms can also be designed for different
time slots in order to achieve better accuracy for the estimation of different parameters in a time division fashion.
Moreover, following a trend started by LTE Advanced, the 6G waveforms will be designed for joint communication
and localization purposes. In this regard, the joint design of the RIS phases and the beamforming codebooks at
the BS and UE is essential. Moreover, a distinction should be made according to the use of RIS either being a

11
transmitter or a reflector [9], [50]. The joint optimization problem can be also challenging, increasing the complexity
of the localization algorithms.
Holographic Simultaneous Localization and Mapping: 6G can exploit holographic radio to increase the ambient
awareness by reconstructing the surrounding environment (holographic mapping) and by allowing a user to self-
localize with respect to the reconstructed map. In this perspective, holographic SLAM will allow user to improve
their perception of the environment and their interaction with it.
AI for Holographic Localization Machine learning approaches can be used to assist in solving the optimization
problem of the phase profile. In addition, the user’s location and orientation can be inferred from the received signal
with machine learning approaches, where a deep neural network can be trained by mapping the environment through
a sub-sample of random location for the UE. Nevertheless, the required training data for data-driven schemes with
machine learning can be massive to achieve the target accuracy. In this regard, another machine learning method
that does not necessitate a large amount of possible UE locations is more relevant.
REFERENCES
[1] C. De Lima et al., “Convergent communication, sensing and localization in 6G systems: An overview of technologies, opportunities and
challenges,” IEEE Access, vol. 9, pp. 26 902–26 925, 2021.
[2] H. Sarieddeen, N. Saeed, T. Y. Al-Naffouri, and M.-S. Alouini, “Next generation Terahertz communications: A rendezvous of sensing,
imaging, and localization,” IEEE Comm. Maga., vol. 58, no. 5, pp. 69–75, June 2020.
[3] M. Z. Win et al., “Network localization and navigation via cooperation,” IEEE Commun. Mag., vol. 49, no. 5, pp. 56–62, 2011.
[4] A. Amanatiadis, “A multisensor indoor localization system for biped robots operating in industrial environments,” IEEE Trans. Ind.
Electron., vol. 63, no. 12, pp. 7597–7606, 2016.
[5] R. Zhang and C. K. Ho, “MIMO broadcasting for simultaneous wireless information and power transfer,” IEEE Trans. Wireless Commun.,
vol. 12, no. 5, pp. 1989–2001, 2013.
[6] G. Pan and M. S. Alouini, “Flying car transportation system: Advances, techniques, and challenges,” IEEE Access, vol. 9, pp. 24 586–24 603,
2021.
[7] A. Coltekin et al., “Extended reality in spatial sciences: a review of research challenges and future directions,” ISPRS Int. J. of Geo-
Information, vol. 9, no. 7, p. 439, 2020.
[8] M. Koivisto et al., “High-efficiency device positioning and location-aware communications in dense 5G networks,” IEEE Communications
Magazine, vol. 55, no. 8, pp. 188–195, 2017.
[9] H. Wymeersch, J. He, B. Denis, A. Clemente, and M. Juntti, “Radio localization and mapping with reconfigurable intelligent surfaces:
Challenges, opportunities, and research directions,” IEEE Vehicular Technology Magazine, vol. 15, no. 4, pp. 52–61, 2020.
[10] H. Ibraiwish, A. Elzanaty, Y. H. Al-Badarneh, and M.-S. Alouini, “EMF-aware cellular networks in RIS-assisted environments,” 2021.
[Online]. Available: http://hdl.handle.net/10754/666963
[11] A. Elzanaty, L. Chiaraviglio, and M.-S. Alouini, “5G and EMF exposure: Misinformation, open questions, and potential solutions,”
Frontiers in Communications and Networks, 2021, [In Press]. [Online]. Available: http://hdl.handle.net/10754/667536
[12] S. Bartoletti, A. Conti, D. Dardari, and A. Giorgetti, “5G localization and context-awareness,” in 5G Italy White Book: from Research to
Market, M. A. Marsan, N. B. Melazzi, and S. Buzz, Eds. Parma, Italy: National, Inter-University Consortium for Telecommunications
(CNIT), Nov. 2018, pp. 167–187.
[13] D. Dardari, P. Closas, and P. M. Djuric, “Indoor tracking: Theory, methods, and technologies,” IEEE Trans. Veh. Technol., vol. 64, no. 4,
pp. 1263–1278, Feb. 2015.
[14] F. Guidi, A. Guerra, and D. Dardari, “Personal mobile radars with millimeter-wave massive arrays for indoor mapping,” IEEE Trans.
Mobile Comput., vol. 15, no. 6, pp. 1471–1484, 2016.
[15] Service requirements for the 5G system, 3GPP, Dec. 2020, tS 22.261.
[16] “5G KPIs vs 6G KPIs — difference between 5G and 6G KPIs,” https://www.rfwireless-world.com/Terminology/5G-KPIs-vs-6G-KPIs.html,
2020.

12
[17] D. Dardari and N. Decarli, “Holographic Communication using Intelligent Surfaces,” arXiv e-prints, p. arXiv:2012.01315, Dec. 2020.
[18] M. Kadic, G. W. Milton, M. van Hecke, and M. Wegener, “3D metamaterials,” Nature Reviews Physics, vol. 1, no. 3, pp. 198–210, 2019.
[19] C. Huang et al., “Holographic MIMO surfaces for 6G wireless networks: Opportunities, challenges, and trends,” IEEE Wireless Commun.,
vol. 27, no. 5, pp. 118–125, 2020.
[20] P. del Hougne, M. Fink, and G. Lerosey, “Optimally diverse communication channels in disordered environments with tuned randomness,”
Nature Electronics, vol. 2, no. 1, pp. 36–41, 2019.
[21] C. L. Holloway et al., “An overview of the theory and applications of metasurfaces: The two-dimensional equivalents of metamaterials,”
IEEE Antennas Propag. Mag., vol. 54, no. 2, pp. 10–35, Apr. 2012.
[22] L. Di Palma et al., “Circularly-polarized reconfigurable transmitarray in ka-band with beam scanning and polarization switching
capabilities,” IEEE Trans. Antennas Propag., vol. 65, no. 2, pp. 529–540, 2016.
[23] F. Guidi and D. Dardari, “Radio positioning with em processing of the spherical wavefront,” IEEE Trans. Wireless Commun., 2021.
[24] P. Nayeri, F. Yang, and A. Z. Elsherbeni, “Beam-scanning reflectarray antennas: A technical overview and state of the art.” IEEE Antennas
Propag. Mag., vol. 57, no. 4, pp. 32–47, 2015.
[25] N. Shlezinger et al., “Dynamic metasurface antennas for uplink massive MIMO systems,” IEEE Trans. Commun., vol. 67, no. 10, pp.
6829–6843, Oct. 2019.
[26] I. Yoo, M. F. Imani, T. Sleasman, H. D. Pfister, and D. R. Smith, “Enhancing capacity of spatial multiplexing systems using reconfigurable
cavity-backed metasurface antennas in clustered MIMO channels,” IEEE Trans. Commun., vol. 67, no. 2, pp. 1070–1084, Feb. 2018.
[27] P. Nepa and A. Buffi, “Near-field-focused microwave antennas: Near-field shaping and implementation,” IEEE Antennas Propag. Mag.,
vol. 59, no. 3, pp. 42–53, Jun. 2017.
[28] D. Dardari, “Communicating with large intelligent surfaces: Fundamental limits and models,” IEEE J. Sel. Areas Commun., vol. 38, no. 11,
pp. 2526–2537, 2020.
[29] C. Huang, A. Zappone, G. C. Alexandropoulos, M. Debbah, and C. Yuen, “Reconfigurable intelligent surfaces for energy efficiency in
wireless communication,” IEEE Trans. Wireless Commun., vol. 18, no. 8, pp. 4157–4170, Aug. 2019.
[30] A. Elzanaty, A. Guerra, F. Guidi, and M.-S. Alouini, “Reconfigurable intelligent surfaces for localization: Position and orientation error
bounds,” arXiv preprint arXiv:2009.02818, 2020.
[31] Q. Wu and R. Zhang, “Intelligent reflecting surface enhanced wireless network via joint active and passive beamforming,” IEEE Trans.
Wireless Commun., vol. 18, no. 11, pp. 5394–5409, 2019.
[32] C. Huang, A. Zappone, G. C. Alexandropoulos, M. Debbah, and C. Yuen, “Reconfigurable intelligent surfaces for energy efficiency in
wireless communication,” IEEE Trans. Wireless Commun., vol. 18, no. 8, pp. 4157–4170, 2019.
[33] D. Dardari and D. Massari, “Using metaprisms for performance improvement in wireless communications,” IEEE Trans. Wireless Commun.,
2021.
[34] A. Guerra, F. Guidi, D. Dardari, and P. M. Djuric, “Near-field tracking with large antenna arrays: Fundamental limits and practical
algorithms,” arXiv preprint arXiv:2102.05890, 2021.
[35] Y. Shen and M. Z. Win, “Fundamental limits of wideband localization— part I: A general framework,” IEEE Trans. Inf. Th., vol. 56,
no. 10, pp. 4956–4980, 2010.
[36] S. Gezici, “A survey on wireless position estimation,” Wireless personal communications, vol. 44, no. 3, pp. 263–282, 2008.
[37] M. Z. Win, Y. Shen, and W. Dai, “A theoretical foundation of network localization and navigation,” Proc. IEEE, vol. 106, no. 7, pp.
1136–1165, 2018.
[38] S. Hu, F. Rusek, and O. Edfors, “Beyond massive MIMO: The potential of positioning with large intelligent surfaces,” IEEE Trans. Signal
Process., vol. 66, no. 7, pp. 1761–1774, 2018.
[39] H. Wymeersch and B. Denis, “Beyond 5G wireless localization with reconfigurable intelligent surfaces,” in Proc. IEEE Int. Conf. Commun.
(ICC), 2020, pp. 1–6.
[40] J. He, H. Wymeersch, L. Kong, O. Silven, and M. Juntti, “Large intelligent surface for positioning in millimeter wave MIMO systems,”
in Proc. IEEE 91st Veh. Techn. Conf. (VTC2020-Spring). IEEE, 2020, pp. 1–5.
[41] J. V. Alegrıa and F. Rusek, “Cramer-rao lower bounds for positioning with large intelligent surfaces using quantized amplitude and phase,”
in Proc 53rd Asilomar Conf. Signals, Syst. Comput., 2019, pp. 10–14.
[42] Y. Liu, E. Liu, and R. Wang, “Reconfigurable intelligent surface aided wireless localization,” arXiv preprint arXiv:2009.07459, 2020.
[43] A. Guerra, F. Guidi, and D. Dardari, “Single anchor localization and orientation performance limits using massive arrays: MIMO vs.
beamforming,” IEEE Trans. Wireless Commun., vol. 17, no. 8, pp. 5241–5255, 2018.

13
[44] J. Zhang, Z. Zheng, Z. Fei, and X. Bao, “Positioning with dual reconfigurable intelligent surfaces in millimeter-wave mimo systems,” in
Proc. IEEE/CIC Int. Conf. on Commun. in China (ICCC), 2020, pp. 800–805.
[45] H. Zhang et al., “Metalocalization: Reconfigurable intelligent surface aided multi-user wireless indoor localization,” arXiv preprint
arXiv:2011.09323, 2020.
[46] T. Ma, Y. Xiao, X. Lei, W. Xiong, and Y. Ding, “Indoor localization with reconfigurable intelligent surface,” IEEE Commun. Lett., vol. 25,
no. 1, pp. 161–165, 2020.
[47] Z. Abu-Shaban et al., “Near-field localization with a reconfigurable intelligent surface acting as lens,” arXiv preprint arXiv:2010.05617,
2020.
[48] H. Zhang et al., “Towards ubiquitous positioning by leveraging reconfigurable intelligent surface,” IEEE Commun. Lett., vol. 25, no. 1,
pp. 284–288, 2020.
[49] Q. Wu, S. Zhang, B. Zheng, C. You, and R. Zhang, “Intelligent reflecting surface aided wireless communications: A tutorial,” IEEE
Transactions on Communications, 2021, Early Access.
[50] J. He, H. Wymeersch, T. Sanguanpuak, O. Silven, and M. Juntti, “Adaptive beamforming design for mmWave RIS-aided joint localization
and communication,” in Proc. IEEE Wireless Commu. and Netw. Conf. Work. (WCNCW), June 2020, pp. 1–6.



![2021 ïEfE r MONITOR AUDIO r Bronze 6G series] ml 20-932 ...vgp.phileweb.com/vgp2021/pdf/14.pdfMONITOR AUDIO Bronze 6G series Bronze 50-6G Bronze IOO-6G ¥75,000 Bronze 200-6G ¥140,000](https://img.pdfslide.net/doc/110x75/61191fc9929b1371d21370f5/2021-efe-r-monitor-audio-r-bronze-6g-series-ml-20-932-vgp-monitor-audio-bronze.jpg)