Embed Size (px)
DESCRIPTION
apresenta um projeto de um semáfaro
Citation preview

UNIVERSIDADE FEDERAL DO MARANHÃO – UFMA
CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS – CCET
DEPARTAMENTO DE ENGENHARIA ELÉTRICA
CURSO DE GRADUAÇÃO EM ENGENHARIA ELÉTRICA
ANTONIO SENA DOS SANTOS FILHO 2009002743
PROJETO DO SEMÁFORO
SÃO LUÍS – MA
2014
ANTONIO SENA DOS SANTOS FILHO 2009002743
PROJETO DO SEMÁFORO
Trabalho apresentado à disciplina
Automação de Sistemas Industriais
do curso de Engenharia Elétrica da
Universidade Federal do Maranhão.
Prof. Dr. Carlos Alberto Brandão Barbosa Leite
SÃO LUÍS – MA
2014
2

Sumário
1. AUTOMAÇÃO EM SISTESMAS INDUSTRIAIS …….…….4
1.1 Introdução...............................................................................4
1.2 Conceito..................................................................................5
1.3 Perpectiva histórica.................................................................5
1.4 Controladores lógicos programáveis.......................................7
2. NOVAS TECNOLOGIAS………………………………………17 2.1 Elementos de proteção............................................................19
2.2 Dispositivos de Entrada e Saída..............................................21
2.3 Dispositivos de Saída e atuadores...........................................31
3. SEMÁFORO –ESTADO DA ARTE
3.1 Projeto 1………………………………………………………36
3.2 Projeto 2………………………………………………………38
4 PROJETO DO SEMÁFARO.....................................................43
5 CONCLUSÃO..............................................................................48
6 REFERENCIAS............................................................................49
3

1. AUTOMAÇÃO EM SISTEMAS INDUSTRIAIS
1.1 INTRODUÇÃO
O trabalho repetitivo dos artesões foi substituído por maquinas, operadas por
profissionais mais baratos e de menor qualificação. Após substituir o trabalho braçal, na
Revolução industrial, as maquinas começam a substituir o trabalho intelectual nos
escritórios, embora sejam menos capazes de superar a percepção e manipulação, a
inteligência social e a criatividade. Automação é a operação de máquina ou de sistema
automatizados ou por controle remoto, com a mínima interferência humana. Automação
pode ser também definida como sendo o controle de processos automáticos. O termo
automático significa ter um mecanismo de atuação própria, que realize uma ação em tempo
determinado ou em resposta a certas condições.
O conceito de automação inclui a idéia de usar a potência elétrica ou mecânica para
acionar algum tipo de máquina. Deve acrescentar à máquina algum tipo de inteligência
para que ela execute sua tarefa de modo mais eficiente e com vantagens econômicas e de
segurança. Nas varias aplicações da automação industrial, temos com uma importante
ferramenta, conhecida como Controlador Lógico Programável (CLP).
Um Controlador Lógico Programável (CLP), também conhecido pela sigla PLC que vem
do inglês Programable Logic Controller, é um computador especializado, baseado num
microprocessador que desempenha funções de controle em processos automáticos com
diversos níveis de complexidade. Os PLC’s são resistentes e modulares, sendo projetados
especificamente para operar no ambiente de controle de processos. Dependendo da família
que o PLC se encontra, são definidas capacidades de processamento e número de entradas
e saídas diferentes.
Este trabalho busca apresentar ao leitor uma visão geral deste dispositivo que é
amplamente utilizado no campo da engenharia, definindo seu conceito, sua arquitetura
interna, assim como sua linguagem de programação e o ambiente em que esta é
implementada, além de outras informações essenciais para o bom entendimento do
funcionamento de um PLC.
Este problema trata do controle de um sistema de semáforos de um cruzamento de via,
ultizando o software o RSlogix 500, que é o programa responsável por provê um ambiente
4

para programa em Ladder e o RSlinx, que é responsável por provê uma comunicação entre
PLC e PC através de drivers/ protocolos de comunicação. O laboratório utilizado para
prática deste experimento foi o Laboratório de automação e controle do curso de
Engenharia Elétrica da Universidade Federal do Maranhão.
1.2. CONCEITO
Antes de definirmos conceitualmente um Controlador Lógico Programável (CLP),
é importante que voltemos um pouco no passado e exploremos sua história, a fim de
descobrir em que contexto tal dispositivo foi inventado.
1.3. PERPECTIVA HISTÓRICA
Os primeiros sistemas de controle foram desenvolvidos durante a Revolução
Industrial, no final do século XIX. Tais sistemas eram muito específicos, eram
implementados por dispositivos mecânicos complexos e, por isso, tinham um período de
vida útil pequeno. Além disso, suas aplicações eram muito restritas e, caso quisessem
mudar a tarefa a ser controlada, era necessário desenvolver outro sistema, o que tornava
seu uso muitas vezes inviável.
Na década de 1920, os sistemas mecânicos foram substituídos pelos relés e contatores.
Esses novos dispositivos permitiram o desenvolvimento de funções de controle muito mais
sofisticadas e complexas, além de se mostrarem uma alternativa de custo bem mais viável.
O uso de relés rapidamente se disseminou pelo mundo e até hoje ainda é possível encontrar
sistemas mais antigos que operam baseados nessa lógica de controle.
A tecnologia continou avançando e, alguns anos depois, surgiram os Circuitos Integrados
(CI’s), o que possibilitou uma nova geração de sistemas de controle. Tais circuitos eram
baseados nas tecnologias TTL ou CMOS e, comparados aos relés, eram muito menores e
mais rápidos, além de possuir uma vida útil maior. Entretanto, os sistemas de controle
ainda eram implementados utilizando relés. Os relés atuavam em conjunto com os CI’s
através de interligações elétricas, o que dificultava muito a alteração do comportamento do
sistema de controle, uma vez que, para se efetuar uma alteração, era necessária uma nova
interligação.
5

Para eliminar essa dificuldade, na década de 1960 os primeiros computadores comerciais
começaram a ser utilizados como controladores em sistemas de controle. Devido a sua
capacidade de ser programável, os computadores apresentaram uma grande vantagem em
relação aos sistemas com interligação elétrica. Porém, os primeiros computadores eram
caros, grandes e muito sensíveis à utilização em ambientes “hostis” encontrados nas
plantas industriais.
Baseado nesse contexto da utilização de computadores como controladores e na
necessidade existente em uma indústria automobilística americana, o Controlador Lógico
Programável foi desenvolvido. Suas primeiras aplicações datam de 1968, em uma divisão
da indústria americana General Motors, a Hydronic Division. Na fábrica, era muito difícil
mudar a lógica de controle dos painéis de comando a cada mudança da linha de produção,
isso demandava muito tempo, dessa maneira, a produtividade diminuía, bem como o lucro
da empresa.
Visando otimizar a produção, o engenheiro Richard Morley, da companhia americana
Bedford Association, liderou uma equipe que tinha como objetivo desenvolver um
controlador que possuísse as seguintes características:
Facilidade de programação e reprogramação, preferencialmente na planta, para ser possível
alterar a sequência de operações na linha de montagem;
• Possibilidades de manutenção e reparo, com blocos de entrada e saída modulares;
• Confiabilidade, para que possa ser utilizado em um ambiente industrial;
• Redução de tamanho em comparação ao sistema tradicional que utilizava relés;
• Ser competitivo em custo com relação a painéis de relés e eletrônicos equivalentes;
• Possibilitar entradas em 115 V e saídas com 115 V e com capacidade mínima de 2 A para
operar com válvulas solenóides e contatores;
• Possibilitar expansões sem grandes alterações no sistema;
• Memória programável com no mínimo 4 kbytes e possibilidade de expansão;
• Estações de operação com interface mais amigável;
• Possibilidade de integração dos dados de processo do CLP em bancos de dados
gerenciais, para tornar disponíveis informações sobre o chão de fábrica para os
departamentos envolvidos com o planejamento da produção.
No fim da década de 1960, a Bedford Association lançou no mercado um dispositivo de
computação denominado MODICON, do inglês MOdular DIgital CONtroller. Este
6

dispositivo foi o primeiro CLP lançado e o engenheiro Richard Morley, por ter sido seu
inventor, ficou conhecido como o “pai” do CLP.
1.4. CONTROLADORES LÓGICOS PROGRAMAVÉIS
Agora que sabemos um pouco mais sobre a história do Controlador Lógico
Programável, somos capazes de dar uma definição mais precisa para este dispositivo, uma
vez que conhecemos suas características e o contexto em que foi inventado.
De maneira bem simples, um CLP pode ser visto como um equipamento eletrônico de
processamento que possui uma interface amigável com o usuário e que tem como função
executar controle de vários tipos e níveis de complexidade. Em outras palavras, é um
computador especializado, baseado em um microprocessador que desempenha funções de
controle através de softwares desenvolvidos pelo usuário.
Vale ressaltar que esta definição não é única, existem outras definições de entidades
técnicas que também são válidas e valem a pena ser citadas neste trabalho.
Para a IEC (International Electrotechnical Comission), um CLP é um “sistema eletrônico
operando digitalmente, projetado para uso em um ambiente industrial, que usa uma
memória programável para a armazenagem interna de instruções orientadas para o usuário
para implementar funções específicas, tais como lógica, sequencial, temporização,
contagem e aritmética, para controlar, através de entradas e saídas digitais ou analógicas,
vários tipos de máquinas ou processos. O controlador programável e seus periféricos
associados são projetados para serem facilmente integráveis em um sistema de controle
industrial e facilmente usados em todas suas funções previstas”.
De acordo com a NEMA (National Electrical Manufactures Association), um CLP é “um
equipamento eletrônico que funciona digitalmente e que utiliza uma memória programável
para o armazenamento interno de instruções para implementar funções específicas, tais
como lógica, sequenciamento, registro e controle de tempos, contadores e operações
aritméticas para controlar, através de módulos de entrada/saída digitais ou analógicos,
vários tipos de máquinas ou processos”.
Outra definição de uma importante entidade que rege as normas técnicas do nosso país, a
ABNT (Associação Brasileira de Normas Técnicas), é a seguinte: “é um equipamento
eletrônico digital com hardware e software compatíveis com aplicações industriais”.
FUNCIONAMENTO BÁSICO DE UM CLP
7

Agora que conhecemos as características e a definição exata de um CLP, é
interessante que saibamos as partes básicas de um CLP e como se dá o funcionamento
deste sistema de controle.
Toda planta industrial, por mais simples que seja, necessita de um sistema de controle para
uma operação mais segura e economicamente viável. Dessa maneira, existem sistemas de
controle que partem do mais baixo nível de complexidade até àqueles que desenvolvem
tarefas mais elaboradas. Independente do grau de complexidade dos sistemas de controle,
eles são caracterizados por três partes que possuem tarefas bem definidas: os transdutores
(sensores), os controladores e os atuadores.
Os transdutores são responsáveis por converter a condição física dos sensores em sinais
elétricos para que o CLP possa interpretar esses sinais e, através da sua lógica de controle,
executar uma ação. Os transdutores ficam ligados às entradas dos CLP’s.
Temos também os atuadores que, de forma bem simplificada, podemos dizer que executam
a função inversa dos transdutores. Ou seja, o CLP recebe um sinal elétrico dos
transdutores, executa uma operação de controle e envia um sinal elétrico para a saída que,
através dos atuadores, é convertido em uma ação para o equipamento que está sendo
controlado, podendo este ser ligado ou desligado por exemplo.
Por último, temos os controladores. Estes são responsáveis por receber os dados dos
transdutores e, através de um programa de controle, calcular o estado de saída, enviando
um sinal elétrico para os atuadores que irão converter esse sinal em uma característica
física.
A Figura 1 abaixo ilustra o funcionamento básico de um Controlador Lógico Programável:
8

ARQUITETURA INTERNA
Agora que vimos um pouco do conceito, das aplicações e do funcionamento básico
de um CLP, vamos explorar ainda mais este dispositivo, partindo para a sua arquitetura
interna.
A arquitetura de um CLP é constituída basicamente pelos componentes microprocessador,
módulos de entrada e saída e uma fonte de alimentação como ilustrado na Figura 2. O
microprocessador consiste da Unidade Central de Processamento (UCP) e da memória,
além de conter pelo menos uma interface de programação para um dispositivo, interface
para dispositivos remotos e outras comunicações de rede. A UCP é responsável por
controlar e processar todas as operações no CLP. Os CLP’s possuem um clock tipicamente
variando de 1 a 8 MHz. Esta frequência determina a velocidade de operação do CLP
fornecendo a temporização e sincronização do sistema. A informação dentro do CLP é
realizada por meio de sinais digitais que são transportados por barramentos. A UCP usa o
barramento de dados para envio de dados entre os elementos constitutivos, o barramento de
endereço para enviar o endereço dos locais de dados armazenados e o barramento de
controle para ações de controle interno. O barramento de sistema é usado para
comunicação entre os canais de entrada/saída e a unidade de entrada/saída.
CPU
A estrutura interna da CPU depende de qual microprocessador está sendo
utilizado, porém, em geral tem-se:
9

• Unidade Lógica e Aritmética: responsável por manipular dados e transporte de saída,
operações aritméticas como adição e subtração e operações lógicas como AND, OR e
NOT;
• Memória: são registradores localizados dentro do microprocessador e utilizados para
armazenar informações envolvidas na execução do programa;
• Unidade de Controle: responsável pelo controle das operações da CPU.
BARRAMENTOS
Os barramentos são os caminhos utilizados para a comunicação dentro do CLP. As
informações são transmitidas de forma binária em palavras de bits. Em geral os CLP’s
possuem quatro barramentos:
• O barramento de dados transporta os dados utilizados no processamento feito pela CPU.
Um microprocessador de 8-bits tem um barramento interno de dados que pode lidar com
números de até 8 bits realizando operações e entregando valores com palavras de 8 bits;
• O barramento de endereço é utilizado para transportar os endereços dos locais de
memória, de modo que cada palavra pode ser localizada na memória e cada localização de
memória possui um único endereço. Se o barramento de endereço consiste de oito linhas,
portanto o número de endereços distintos é 28 = 256;
• O barramento de controle transporta sinais utilizados pela CPU para controle, como, por
exemplo, informar os dispositivos de memória se vão receber dados a partir de uma
entrada ou saída de dados e para transportar sinais de temporização utilizados para
sincronizar ações;
• Barramento do sistema é utilizado para comunicação entre as portas de E/S e a unidade
de E/S.
MEMÓRIA
A memória do CLP é composta de duas grandes memórias diferentes, memória do
sistema e memória de aplicação, que por sua vez são compostas de outras áreas.
A memória do sistema coleciona os programas permanentes e é considerada parte do CLP.
Estes programas supervisórios direcionam ao sistema atividades como execução de
10

programas e comunicação com dispositivos periféricos. Esta área é formada por memória
ROM e não é acessível pelo usuário.
A memória de aplicação fornece uma área para as instruções utilizadas pelo programador,
sendo esta composta por vários domínios, cada um tendo sua função específica de
utilização. E geralmente é formada por memória RAM.
A Figura 3 ilustra esta organização de memória conhecida como mapa de memória, onde
as regiões são necessariamente adjacentes, quer fisicamente quer por endereço. O mapa de
memória mostra não só o que está armazenado na memória, mas também onde os dados
são armazenados, de acordo com seus endereços.
Embora os diferentes controladores programáveis raramente possuam mapas de memórias
idênticas, as exigências de armazenamento são semelhantes. Em geral, todos os CLP’s
devem ter memória atribuída para quatro áreas de memória básicas, que são:
• Memória de Execução: é uma coleção de programas permanentemente armazenados que
são incorporados ao sistema. Estes programas de supervisão além de atividades como
execução de programas e comunicação com dispositivos periféricos, como mencionado
anteriormente, são responsáveis por atividades de manutenção de outros sistemas do CLP.
• Bloco de Rascunho: é uma região da memória utilizada para armazenar quantidades
pequenas de dados como cálculos intermediários.
11

Estes dados são armazenados nesta memória para evitar desperdício de tempo na
recuperação de dados na memória principal.
• Tabela de Dados: armazena todos os dados associados com o programa de controle, tais
como valores pré-definidos dos contadores e outras constantes armazenadas, além de
variáveis usadas pelo programa ou CPU. Esta seção também é responsável por armazenar
os valores de status da entrada e saída do sistema.
• Programa de Usuário: é uma área da memória que, como o nome já diz, armazena
instruções de programa inseridas pelo usuário além do programa de controle.
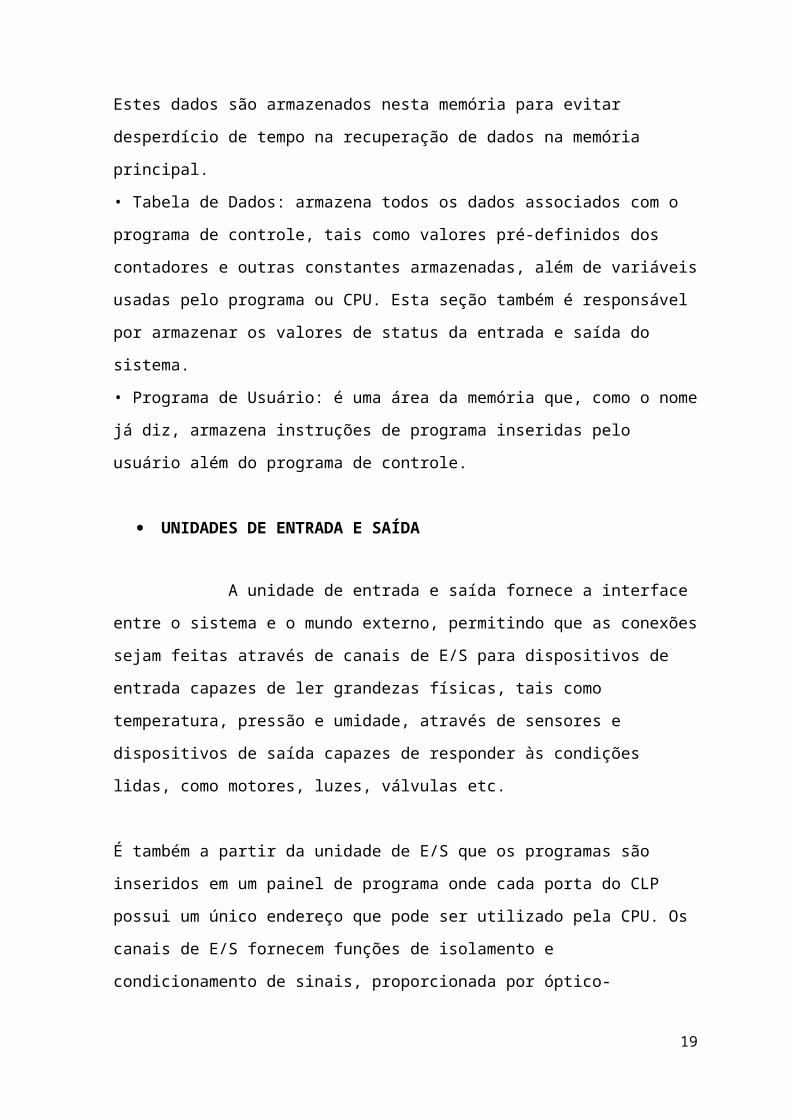
UNIDADES DE ENTRADA E SAÍDA
A unidade de entrada e saída fornece a interface entre o sistema e o mundo externo,
permitindo que as conexões sejam feitas através de canais de E/S para dispositivos de
entrada capazes de ler grandezas físicas, tais como temperatura, pressão e umidade, através
de sensores e dispositivos de saída capazes de responder às condições lidas, como motores,
luzes, válvulas etc.
É também a partir da unidade de E/S que os programas são inseridos em um painel de
programa onde cada porta do CLP possui um único endereço que pode ser utilizado pela
CPU. Os canais de E/S fornecem funções de isolamento e condicionamento de sinais,
proporcionada por óptico-isoladores, de modo que os sensores e atuadores podem muitas
vezes ser diretamente conectados, sem a necessidade de outros circuitos condicionadores.
O isolamento elétrico do mundo externo é geralmente por meio de óptico-isoladores. A
Figura 4 (datasheet 4N25 – VISHAY semiconductors) mostra o princípio de
funcionamento de um óptico-isolador. Quando um pulso digital passa através do LED, um
pulso de radiação infravermelho é produzido. Este pulso é detectado pelo foto-transistor e
dá origem a uma tensão no circuito, porém agora com uma corrente menor.
12

O sinal digital do CLP geralmente é compatível com o microprocessador que vai nele que,
na grande maioria das vezes, é de 5V DC. No entanto, o condicionamento do sinal, com
isolamento, permite uma ampla gama de sinais de entrada que, dependendo do CLP, pode
variar de 5V a 240V digital/discreto como na Figura 5 abaixo
As unidades de saída recebem uma entrada digital de 5V, e a saída pode ser Digital ou
Analógica variando de 24 a 240V, como mostra a Figura 6. As unidades de saída são
especificadas como sendo do tipo relé, transistor ou triac, dependendo do tipo de atuador a
ser controlado.
Relés funcionam tanto em CA como em CC, resistem à cargas de até 2,5A e suportam
melhor os picos de tensão pois possuem uma camada de ar entre os seus contatos, o que
elimina a possibilidade de corrente de fuga. Mas, são lentos e desgastam com o tempo
sendo inviável em processos que necessitam de uma resposta mais rápida.
13

Os transistores são silenciosos, chaveiam em corrente contínua e não tem peças móveis
sujeitas ao desgaste. São rápidos e reduzem o tempo de resposta, mas suportam cargas
muito pequenas sendo necessária a utilização de óptico-isoladores.
Os triacs possuem características semelhantes aos transistores, diferenciando no aspecto de
que os mesmos chaveiam em corrente alternada, pois se baseiam em SCR’s.
FONTE DE ALIMENTAÇÃO
É encarregada de fornecer alimentação ao barramento do CLP, que geralmente é de
5 ou 24VCC, tensão que não é fornecida por concessionárias de energia elétrica. Dessa
forma, utilizamos esse módulo para converter a tensão fornecida (110 ou 220V) para a
tensão requisitada pelo CLP, além de proteger os componentes contra picos de tensão,
garantindo a operação normal com flutuações que variam de 10 a 15%.
Em condições de instabilidade gerada por flutuações na rede de alimentação ou
interferência eletromagnética é aconselhado que junto ao CLP seja instalado
estabilizadores e transformadores de isolação.
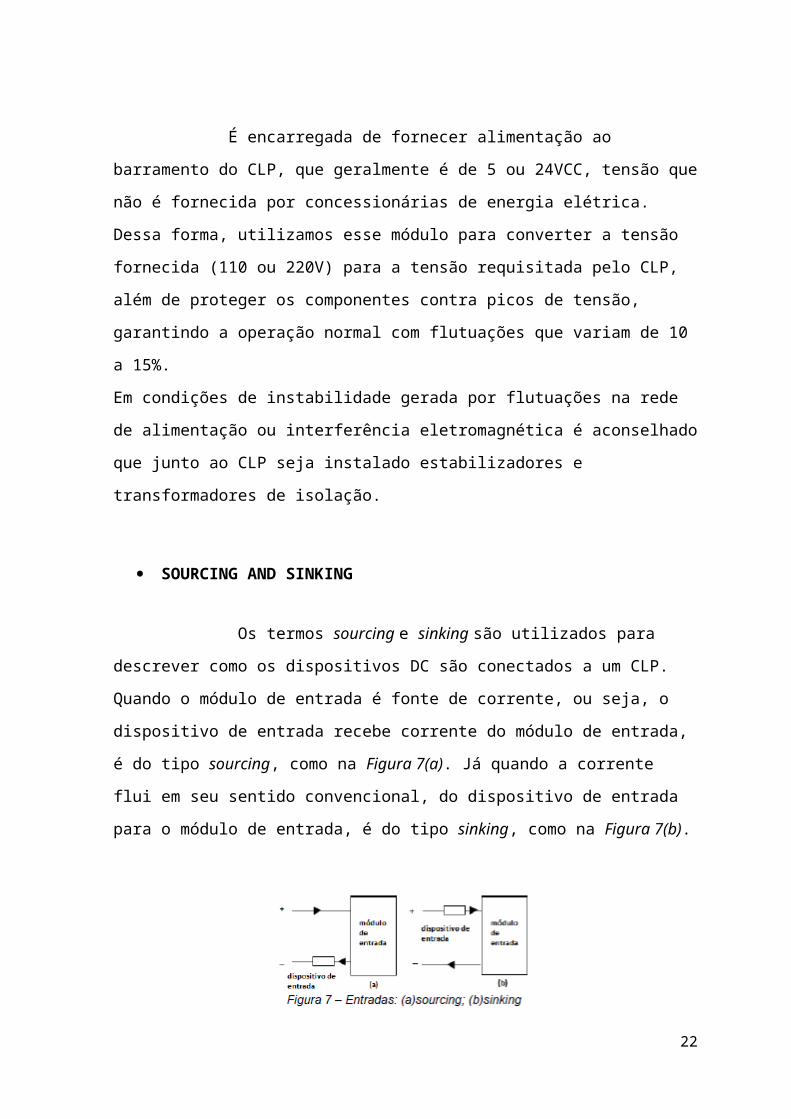
SOURCING AND SINKING
Os termos sourcing e sinking são utilizados para descrever como os dispositivos
DC são conectados a um CLP. Quando o módulo de entrada é fonte de corrente, ou seja, o
dispositivo de entrada recebe corrente do módulo de entrada, é do tipo sourcing, como na
Figura 7(a). Já quando a corrente flui em seu sentido convencional, do dispositivo de
entrada para o módulo de entrada, é do tipo sinking, como na Figura 7(b).
14

Se a corrente flui a partir do módulo de saída para um carga de saída, o módulo de saída é
do tipo sourcing, como na Figura 8(a). Porém, se a corrente flui para o módulo de saída a
partir de uma carga de saída, então o módulo é do tipo sinking, como na Figura 8(b).
É importante saber o tipo de entrada ou saída em questão para que possa ser corretamente
realizada as ligações com o CLP. As saídas do tipo sourcing de sensores devem ser
conectados às entradas do tipo sourcing do CLP. A interface com o CLP não vai funcionar
e os dados podem se perder caso essa regra não seja seguida.
PROGRAMAÇÃO LADDER
Os CLPs substituem elementos e componentes eletro-eletrônicos de acionamento e
a linguagem utilizada na sua programação é baseada na linguagem de diagramas lógicos de
acionamento desenvolvidos por eletrotécnicos e profissionais da área de controle, esta
linguagem é denominada linguagem de contatos ou simplesmente LADDER.
A linguagem Ladder permite que se desenvolvam lógicas combinacionais, seqüenciais e
circuitos que envolvam ambas, utilizando como operadores para estas lógicas: entradas,
saídas, estados auxiliares e registros numéricos.
A sua simplicidade tem como objetivo facilitar o rápido entendimento por parte de técnico
e engenheiro, já acostumados com a logica de relé; sendo desnecessário aprender uma nova
linguagem de programação.
15

Tabela 2: Linguagem Ladder
A fim de entendermos a estrutura da linguagem vamos adotar um exemplo bem simples: o
acionamento de uma lâmpada L a partir de um botão liga/desliga. Na figura 3 temos o
esquema elétrico usual, o programa e as ligações no CLP. Para entendermos o circuito com
o CLP, vamos observar o programa desenvolvido para acender a lâmpada L quando
acionamos o botão B1.
Figura 9. Modelo de programação em Ladder.
16

2. NOVAS TECNOLOGIAS
2.1 Introdução
Os módulos de saída podem ser encontrados com drivers a transistor para carga
DC, a relé para cargas AC e DC e a tiristores para cargas AC de potência. As
configurações de CLPs variam de fabricante a fabricante, e os módulos de entradas e
saídas, sejam elas digitais ou analógicas, podem ser encontrados em grupos separados ou
associados [2].
Existem também cartões de comunicação entre CLPs ou entre computadores, sejam
eles industriais ou PCs. Estes cartões são muito utilizados e de extrema importância na
automação de processos e máquinas, pois permitem que um sinal recebido por um PLC,
possa acionar um contato de outro PLC ou de uma placa conversora A/D instalada em um
computador, que estejam distantes.
Outro acessório importante é a IHM - Interface Homem-Máquina, que é um painel
de controle programável, que apresenta para o usuário mensagens de acordo com as
condições dos sinais de entrada e saída, permitindo que um operador normal tome ciência
da condição do sistema ou equipamento que está sendo controlado. Este acessório é
utilizado como sistema supervisório e apresenta mensagens de emergência ou de parada
por problemas técnicos.
Outra área avança com grande força que é a instrumentação virtual, onde os
sensores e atuadores são ligados a um computador e um software processa as informações,
enviando posteriormente as respostas. As vantagens desses softwares são: linguagem de
programação gráfica, ferramenta de simulação interativa, aquisição de dados e controle,
monitoramento e processamento de imagens. Dentre os softwares mais utilizados estão o
LabView e o BridgeView.
17

Figura10. Rede industrial.
Figura11. Controle de Processo Industrial com Superviosrio.
18
2.2 Elementos de Proteção
Elementos de Proteção Disjuntor
Dispositivo de manobra ( mecânico) e de proteção, capaz de estabelecer ( ligar ),
conduzir e interromper correntes em condições normais do circuito e, assim como
estabelecer, conduzir por tempo especificado e interromper correntes em condições
anormais das especificadas para o circuito, tais como as de curto-circuito. Visa garantir a
proteção, abertura e fechamento de um circuito sem risco de arco elétrico.
Figura 12. Disjuntores.
Figura 13. Componentes do Disjuntores.
19

Figura 14. Funções dos Componentes do Disjuntores.
1. Atuator - utilizada para desligar ou resetar manualmente o disjuntor. Também
indica o estado do disjuntor (Ligado/Desligado ou desarmado). A maioria dos
disjuntores são rojetados de forma que o disjuntor desarme mesmo que o atuador
seja segurado ou travado na posição "liga".
2. Mecanismo atuator- une os contatos juntos ou independentes.
3. Contatos - Permitem que a corrente flua quando o disjuntor está ligado e seja
interrompida quando desligado.
4. Terminais
5. Trip bimetálico
6. Parafuso calibrador - permite que o fabricante ajuste precisamente a corrente de trip
do dispositivo após montagem.
7. Solenóide
8. Extintor de arco
Curvas de Disparo
A norma de proteção estabelece que os disjuntores de curva B devem atuar para
correntes de curto-circuito entre três e cinco vezes a corrente nominal. Enquanto isso, os de
curva C atuam entre cinco e dez vezes a corrente nominal e, por fim, os disjuntores de
curva D devem responder para correntes entre dez e vinte vezes a corrente nominal[3].
Os disjuntores de curva B são indicados para cargas resistivas com pequena
corrente de partida( aquecedores elétricos, fornos elétricos e lâmpadas incandescentes);
20

jáos de curva C são indicados para cargas de média corrente de partida( motores elétricos,
lâmpadas fluorescentes e máquinas de lavar roupas); por fim, os disjuntores de curva D são
indicados para cargas com grande corrente de partida, a exemplo de transformadores
BT/BT (baixa tensão).
Figura 15. Curva de Disparo de Disjuntores
2.3 Dispositivos de Entrada e Saída
São aqueles que emitem informações (sinais elétricos) ao sistema por meio de uma
ação muscular, mecânica, elétrica, eletrônica ou uma combinação entre elas. Entre esses
elementos, podemos citar : botoeiras, chaves fim-de-curso, sensores de proximidade,
sensores potenciométricos, pressostatos, termopares, termostatos, chaves de nível, entre
outros.
2.3.1 Botoeiras
21
São chaves acionadas manualmente, constituídas por: botão, contato NA (normal
aberto) ou NF (normal fechado). Quando seu botão é pressionado, invertem seus contatos,
e quando este for solto, devido ä ação de uma mola seus contatos voltam à posição inicial.
Figura16. Botoeira
Figura 17. Botoeira com retenção
As botoeiras pulsadoras invertem seus contatos mediante o acionamento de um botão
e, devido a ação de uma mola, retornam à posição inicial quando cessa o acionamento.
22

Essa botoeira possui um contato aberto e um contato fechado, sendo acionada por um
botão pulsador liso e reposicionada por mola. Enquanto o botão não for acionado, os
contatos 11 e 12 permanecem fechados, permitindo a passagem da corrente elétrica, ao
mesmo tempo em que os contatos 13 e 14 se mantêm abertos, interrompendo a passagem
da corrente. Quando o botão é acionado, os contatos se invertem de forma que o fechado
abre e o aberto fecha. Soltando-se o botão, os contatos voltam à posição inicial pela ação
da mola de retorno.
Figura 18. Botao Pulsador.
As botoeiras com trava também invertem seus contatos mediante o acionamento de
um botão, entretanto, ao contrário das botoeiras pulsadoras, permanecem acionadas e
travadas mesmo depois de cessado o acionamento.
Figura 19. Botao com Trava.
23

Esta botoeira é acionada por um botão giratório com uma trava que mantém os
contatos na última posição acionada. Como o corpo de contatos e os bornes são os mesmos
da figura anterior e apenas o cabeçote de acionamento foi substituído, esta botoeira
também possui as mesmas características construtivas, isto é, um contato fechado nos
bornes 11 e 12 e um aberto 13 e 14. Quando o botão é acionado, o contato fechado 11/12
abre e o contato 13/14 fecha e se mantêm travados na posição, mesmo depois de cessado o
acionamento. Para que os contatos retornem à posição inicial é necessário acionar
novamente o botão, agora no sentido contrário ao primeiro acionamento.
Outro tipo de botoeira com trava, muito usada como botão de emergência para
desligar o circuito de comando elétrico em momentos críticos, é acionada por botãodotipo
cogumelo.
Figura 20. Botao de Emergência.
Mais uma vez, o corpo de contatos e os bornes são os mesmos, sendo trocado
apenas o cabeçote de acionamento. O botão do tipo cogumelo, também conhecido como
botão soco-trava, quando é acionado, inverte os contatos da botoeira e os mantém travados.
O retorno à posição inicial se faz mediante um pequeno giro do botão no sentido horário, o
que destrava o mecanismo e aciona automaticamente os contatos de volta a mesma
situação de antes do acionamento.
Outro tipo de botão de acionamento manual utilizado em botoeiras é o botão flip-
flop, também conhecido como divisor binário, o qual alterna os pulsos dados no botão,
uma vez invertendo os contatos da botoeira, outra trazendo-os à posição inicial.
24

2.3.2 Chaves Fim-de-curso
São chaves acionadas mecanicamente, por meio de um rolete mecânico, ou
gatilho (rolete escamoteável), fazendo com que seus contatos sejam invertidos ao serem
acionadas. Geralmente são posicionadas no decorrer do percurso de cabeçotes de
máquinas, ou hastes de cilindros.
Figura 21. Estrutura da Chave Fim-de-Curso.
O acionamento de uma chave fim de curso pode ser efetuado por meio de um rolete
mecânico ou de um rolete escamoteável, também conhecido como gatilho. Existem, ainda,
chaves fim de curso acionadas por uma haste apalpadora, do tipo utilizada em instrumentos
de medição como, por exemplo, num relógio comparador.
25

Figura 22. Chave Fim-de-Curso.
Esta chave fim de curso é acionada por um rolete mecânico e possui um contato
comutador formado por um borne comum 11, um contato fechado 12 e um aberto 14.
Enquanto o rolete não for acionado, a corrente elétrica pode passar pelos contatos 11 e 12 e
está interrompida entre os contatos 11 e 14. Quando o rolete é acionado, a corrente passa
pelos contatos 11 e 14 e é bloqueada entre os contatos 11 e 12. Uma vez cessado o
acionamento, os contatos retornam à posição inicial, ou seja, 11 interligado com 12 e 14
desligado.
Figura 23. Chave Fim-de-Curso com Rolete.
Esta outra chave fim de curso também é acionada por um rolete mecânico mas,
diferentemente da anterior, apresenta dois contatos independentes sendo um fechado,
formado pelos bornes 11 e 12, e outro aberto, efetuado pelos bornes 13 e 14. Quando o
26

rolete é acionado, os contatos 11 e 12 abrem, interrompendo a passagem da corrente
elétrica, enquanto que os contatos 13 e 14 fecham, liberando a corrente.
Os roletes mecânicos acima apresentados podem ser acionados em qualquer direção
que efetuarão a comutação dos contatos das chaves fim de curso. Existem, porém, outros
tipos de roletes que somente comutam os contatos das chaves se forem acionados num
determinado sentido de direção. São os chamados roletes escamoteáveis, também
conhecidos na indústria como gatilhos.
Figura 24. Chave Fim-de-Curso com Gatilho.
Esta chave fim de curso, acionada por gatilho, somente inverte seus contatos quando
o rolete for atuado da esquerda para a direita. No sentido contrário, uma articulação
mecânica faz com que a haste do mecanismo dobre, sem acionar os contatos comutadores
da chave fim de curso. Dessa forma, somente quando o rolete é acionado da esquerda para
a direita, os contatos da chave se invertem permitindo que a corrente elétrica passe pelos
contatos 11 e 14 e seja bloqueada entre os contatos 11 e 12. Uma vez cessado o
acionamento, os contatos retornam à posição inicial, ou seja, 11 interligado com 12 e 14
desligado.
23
27

2.3.3 Sensores de proximidade
São chaves eletrônicas que emitem um sinal ao detectar a proximidade de
um objeto em esteiras, hastes de cilindros ou cabeçotes de máquinas. Os sensores de
proximidade podem ser de diversos tipos, entre eles estão os: indutivos e óticos.
Basicamente, os sensores de proximidade apresentam as mesmas características de
funcionamento. Possuem dois cabos de alimentação elétrica, sendo um positivo e outro
negativo, e um cabo de saída de sinal. Estando energizados e ao se aproximarem do
material a ser detectado, os sensores emitem um sinal de saída que, devido principalmente
à baixa corrente desse sinal, não podem ser utilizados para energizar diretamente bobinas
de solenóides ou outros componentes elétricos que exigem maior potência.
Diante dessa característica comum da maior parte dos sensores de proximidade, é
necessária a utilização de relés auxiliares com o objetivo de amplificar o sinal de saída dos
sensores, garantindo a correta aplicação do sinal e a integridade do equipamento.
Figura 25. Sensor Capacitivo.
Os sensores de proximidade capacitivos registram a presença de qualquer tipo de
material. A distância de detecção varia de 0 a 20 mm, dependendo da massa do material a
ser detectado e das características determinadas pelo fabricante.
28

Sensores Indutivos
São sensores que são acionados quando um objeto metálico é aproximado,
entrando em um campo eletromagnético.
Figura 26. Sensor Indutivo.
Os sensores de proximidade indutivos são capazes de detectar apenas materiais
metálicos, a uma distância que oscila de 0 a 2 mm, dependendo também do tamanho do
material a ser detectado e das características especificadas pelos diferentes fabricantes.
Sensores óticos
São sensores que funcionam segundo o princípio de emissão e irradiação
infravermelha.
Ótico por barreira: Sensor no qual possui um elemento emissor de irradiação
infravermelha, montado em frente a um receptor em uma distância pré-determinada. É
acionado quando ocorre uma interrupção da irradiação por qualquer objeto, pois esta
deixará de atingir o elemento receptor.
Ótico por difusão: Sensor no qual o emissor e o receptor estão montados em um
mesmo conjunto. É acionado quando os raios infravermelhos emitidos, refletem sobre a
superfície do objeto e retornam ao receptor.
29

Ótico por reflexão: Sensor parecido com o ótico por difusão, diferindo apenas no
sistema ótico. Os raios infravermelhos emitidos refletem em um espelho instalado
frontalmente, e retornam ao receptor. É acionado quando um objeto interrompe a reflexão
de raios entre o espelho e o receptor.
Figura 27. Sensor Óptico.
Pressostatos
Os pressostatos, também conhecidos como sensores de pressão, são chaves elétricas
acionadas por um piloto hidráulico ou pneumático. Os pressostatos são montados em
linhas de pressão hidráulica e ou pneumática e registram tanto o acréscimo como a queda
de pressão nessas linhas, invertendo seus contatos toda vez em que a pressão do óleo ou do
ar comprimido ultrapassar o valor ajustado na mola de reposição.
Figura 28. Sensor Pressostato.
30

2.4. Dispositivos de saída e Atuadores
Recebem as informações (sinais elétricos) enviadas pelo sistema, com a finalidade
de auxiliar ou até mesmo realizar diretamente um trabalho elétrico, mecânico, pneumático
ou hidráulico em uma máquina ou processo industrial, ou apenas a fim de realizar
sinalização visual ou sonora aos operadores.
Entre esses elementos, podemos citar: relés, contatores, solenóides de válvulas,
cilindros, válvulas de controle proporcional, inversores de frequência, motores, entre
outros.
Cilindros Também conhecidos como atuadores pneumáticos ou hidráulicos,
podem ser do tipo linear, rotativo ou oscilante. Os mais comuns são os do tipo linear, que
transformam a pressão do ar comprimido ou do óleo, em movimento linear e força. Os
tipos de cilindros lineares mais utilizados são o de simples ação e o de dupla-ação.
O cilindro de simples ação, possui um único orifício pelo qual o ar ou óleo entra e
sai. Ao colocarmos pressão neste cilindro ele é movimentado e ao retirarmos pressão, uma
mola retorna a haste do cilindro para a posição original.
Já os cilindros de dupla-ação, possuem dois orifícios pelos quais podem
entrar e sair o ar ou óleo, dependendo do movimento desejado, portanto, um orifício
serve para o avanço do cilindro e outro para o seu retorno. O fluxo de ar ou óleo que o
cilindro recebe, é transmitido por válvulas direcionais.
Válvulas direcionais Para os cilindros pneumáticos e hidráulicos trabalharem,
efetuando seu avanço e recuo, é necessária a utilização de válvulas que permitam
direcionar o fluxo de ar comprimido ou óleo para dentro ou para fora do cilindro.
As válvulas direcionais são descritas pelo número de vias e posições que
ele possui. As vias, são conexões de entrada, saída e escape de ar ou óleo, e as posições
são a
quantidade de manobras que aválvula permite realizar, como por exemplo uma
válvula de 2 vias e 2 posições, permite ora a passagem de ar ora o bloqueio de ar da
entrada para a saída.
31

As válvulas podem ser acionadas por comando manual, elétrico, pneumático ou
mecânico. Normalmente são utilizadas solenóides (bobinas eletromagnéticas) para a
mudança de posição da válvula, pois tem a vantagem de ser acionada a distância e com
bastante segurança e precisão.
Relés Auxiliares
Os relés auxiliares são chaves elétricas de quatro ou mais contatos, acionadas por
bobinas eletromagnéticas. Há no mercado uma grande diversidade de tipos de relés
auxiliares que, basicamente, embora construtivamente sejam diferentes, apresentam as
mesmas características de funcionamento.
Figura 29. Relé Auxiliar.
Este relé auxiliar, particularmente, possui 2 contatos abertos (13/14 e 43/44) e 2
fechados (21/22 e 31/32), acionados por uma bobina eletromagnética de 24 Vcc. Quando a
bobina é energizada, imediatamente os contatos abertos fecham, permitindo a passagem da
corrente elétrica entre eles, enquanto que os contatos fechados abrem interrompendo a
corrente. Quando a bobina é desligada, uma mola recoloca imediatamente os contatos nas
suas posições iniciais.
32

Figura 30. Contatos do Relé Auxiliar.
Além de relés auxiliares de 2 contatos abertos (NA) e 2 contatos fechados (NF),
existem outros que apresentam o mesmo funcionamento anterior mas, com 3 contatos NA
e 1 NF.
Figura 31. Relé Auxiliar Com Comutador
Este outro tipo de relé auxiliar utiliza contatos comutadores, ao invés dos
tradicionais contatos abertos e fechados. A grande vantagem desse tipo de relé sobre os
anteriores é a versatilidade do uso de seus contatos. Enquanto nos relés anteriores a
utilização fica limitada a 2 contatos Na e 2 NF ou 3 NA e 1 NF, no relé de contatos
comutadores pode-se empregar as mesmas combinações, além de, se necessário, todos os
contatos abertos ou todos fechados ou ainda qualquer outra combinação desejada. Quando
a bobina é energizada, imediatamente os contatos comuns 11, 21, 31 e 41 fecham em
relação aos contatos 13, 24, 34 e 44, respectivamente, e abrem em relação aos contatos 12,
33

22, 32 e 42. Desligando-se a bobina, uma mola recoloca novamente os contatos na posição
inicial, isto é, 11 fechado com 12 e aberto com
14, 21 fechado com 22 e aberto com 24, 31 fechado com 32 e aberto com 34 e,
finalmente, 41 fechado com 42 e aberto em relação ao 44.
Contatores de Potência
Os contatores de potência apresentam as mesmas características construtivas e de
funcionamento dos relés auxiliares, sendo dimensionados para suportarem correntes
elétricas mais elevadas, empregadas na energização de dispositivos elétricos que exigem
maiores potências de trabalho.
Figura 32. Estrutura do Relé Auxiliar
34

Indicadores Luminosos
Os indicadores luminosos são lâmpadas incandescentes ou LEDs, utilizadas na
sinalização visual de eventos ocorridos ou prestes a ocorrer. São empregados, geralmente,
em locais de boa visibilidade que facilitem a visualização do sinalizador.
Figura 33. Indicador Luminoso
Indicadores Sonoros
Os indicadores sonoros são campainhas, sirenes, cigarras ou buzinas, empregados
na sinalização acústica de eventos ocorridos ou prestes a ocorrer. Ao contrário dos
indicadores luminosos, os sonoros são utilizados, principalmente, em locais de pouca
visibilidade onde um sinalizador luminoso seria pouco eficaz.
35

Figura 34. Indicador Sonoro
São equipamentos que, quando energizados, realizam movimentos giratórios de
seu eixo, que podem ser medidos em Rotações por minuto (Rpm).
Existem motores de diversos tipos e finalidades, variando de acordo com sua forma
construtiva e tipo de alimentação (tensão contínua ou alternada), consumo de corrente, etc.
São utilizados para inúmeras aplicações: movimentar e acionar esteiras,
elevadores, bombas, compressores, partes móveis de máquinas, extrusoras, robôs,
misturadores, ventiladores, furadeiras, bem como sua utilização já bastante difundida na
área de eletrodomésticos, automóveis, aviões, etc.
Figura 35. Motor Elétrico
3. SEMÁFORO-ESTADO DA ARTE
3.1. Projeto 1
Os estudantes Antunes e Afonso em [5] fizeram um projeto para o controle de um
sistema de semáforos de um cruzamento. Para realizar o trabalho usaram o PLC do tipo
CPM1, com 6 entradas e 4 saidas.
36

A comunicação entre o PLC e o computador ocorre atraves da porta serial. A figura
abaixo mostra o esquema dos semáforos.
Figura 36. Semáforo
Figura 37. Motor Elétrico
Nesse trabalho o sincronismo entre os semáforos mostra-se extremamente
importante. Por exemplo: os semaforos 1 e 2 não podem ter a luz acessa ao mesmo tempo
que os semaforos 3 e 4 assim como no caso da luz vermelha para que não ocorra
problemas.
37

3.2 Projeto 2
Este trabalho foi desenvolvido com o bjetivo de realizar o controle de uma via de
semaforos integrado com o PLC.
Os elementos da modelagem são os seguintes:
Ciclo de temporização dos semáforos das vias 1 e 2;
tempo entre chegada de veículos de cada via; e
demanda de automóveis por via após semáforo.
A Figura33 mostra um esboço detalhado do ambiente de simulação das Vias 1 e 2
do cruzamento semaforizado, onde são aplicados os dados coletados. São três semáforos,
dois instalados na Via 1 (Semáforos 1 e 3) e um na Via 2 (Semáforo 2).
As duas vias são de mão única, com duas pistas cada. Assim, ao se aproximarem da
interseção semaforizada, os veículos das Vias 1 e 2 podem ser conduzidos da seguinte
forma:
Se o motorista da Via 1 desejar se manter nesta mesma Via, ele deve
manter/conduzir o automotivo sobre a pista da esquerda, aqui definida como
v11, ou sobre a pista da direita, aqui definida como v12;
quando o motorista da Via 1 desejar converter para a Via 2, ele deve
manter/conduzir o automotivo sobre a pista v12;
se o motorista que está na Via 2 desejar se manter nesta mesma Via, ele deve
manter/conduzir o automotivo sobre a pista da direita, aqui definida como v21,
ou sobre a pista da esquerda, definida como v22; e
quando o motorista da Via 2 desejar converter para a Via 1, ele deve
manter/conduzir o automotivo sobre a pista v22.
38

Figura 38. Funciomanento da via
Os autores desse projeto realizaram o seguinte euqema do modelo conceitual da
via:
39

Figura 39. Modelo conceitual das Vias 1 e 2 documentado
Na figura 35 temos o ambiente de simulaçao do projeto em conexão com o PLC.
40

Figura 40. Modelo de simulação
Figura 41. Esquema de ligação do PC e o PLC
41

Figura 42. Esquema da programa em LADDER
Através do modelo, os autores conseguiram acompanhar em tempo real o
comportamento do fluxo de veículos em situações distintas de trânsito. Cada situação foi
oriunda de demandas em horários específicos, onde a lógica de comando dos semáforos no
modelo computacional foi acionada pelo controlador lógico programável.
Através de tabelas e gráficos, pôde-seavaliar o sistema e constatar que o modelo de
simulação atendeu aos diferentes estímulos das variáveis relativas à dinâmica do sistema.
Da mesma forma, o modelo permitiu avaliar o comportamento de cada uma das vias
semaforizadas e dos comandos de ativação/desativação oriundos do controlador[].
4. PROJETO DE SEMÁFOROS
42

Agora que o programa foi apresentado e sabemos um pouco das suas funções e elementos,
iremos apresentar um exemplo prático, um projeto programado em linguagem Ladder, para
o controle de um semáforo de um cruzamento de uma via, que em questão é o principal
objetivo do nosso trabalho, desenvolvido no laboratório de controle de processo, na
universidade federal do maranhão.
MATERIAL UTILIZADO
-Módulo de Entrada Digital código 176-IA16
-Módulo de Saída Digital relé código 176-OW16
-Módulo de Entrada/Saída Analógica código 1746-NIOV
-PC com MS Windows (9x, NT ou posteriores) com porta de comunicação com conector
DB-9 (macho)
-Cabo DB9/DB9 (fêmea) para a conexão do CLP com o computador
-PLC SLC 500 CPU 5/05
-Botoeira
-chave de fenda
-cabos elétricos
Figura 43. Imagem da bacanda de simulação do semáfaro
Programação em ladder
43

Figura 44. Programação em ladder
44

Figura 45. Programação em ladder
A comunicação entre o PLC e o computador ocorre atraves da porta serial. A figura abaixo
mostra o esquema dos semáforos.
Figura 46. (a)
45

Figura 46. (b)
Figura 46. (c)
46

Figura 46. (d)
47

CONCLUSÃO
Como podemos perceber, por mais simples que seja uma planta industrial ela
necessita de um sistema de controle para que possa funcionar de maneira otimizada e
viável. Nesse contexto, os Controladores Lógicos Programáveis desempenham um papel
fundamental na indústria, pois são capazes de controlar processos dos mais simples aos
mais complexos, com a grande vantagem de serem programáveis, ou seja, se adequam a
qualquer tarefa com facilidade viabilidade econômica.
Dentro dessa gama de possibilidades, cabe um destaque ao CLP da fabricante WEG, o
modelo TPW-03, que possui um grande número de funções e uma capacidade de
processamento altíssima, o que o habilita para desenvolver uma infinidade de tarefas.
Com certeza ainda há muito a se explorar nessa área, ainda existem muitas limitações, mas
o homem já é capaz de controlar inúmeros processos com o que tem em mãos, e a
necessidade trará o surgimento de novas tecnologias.
48

REFERÊNCIAS
[1] Bolton, W. PROGRAMMABLE LOGIC CONTROLLERS, Newnes,4ª Edition, Oxford,
2006.208p.
[2] Allen Bradley. SLC 500 Modular Hardware Style – Instalation and Operation Manual.
Wisconsin: Allen Bradley Company, 1993,223p.
[3]Apostila Rockwell – EPUSP
[4] CLP curso de Rs logix
[5] Rockwell automation SLC 500 Allen Bradly RS logix 500
[6] Comandos Elétricos-Acionamentos Automáticos-PLC. Material do Sistema FIEMG.
[7] Silva, Marcelo Eurípedes. Automação Industrial. PDF do Colégio Técnico Industrial de
Piracicaba da Fundação Municipal de Ensino de Piracicaba.
49





























