Embed Size (px)
Citation preview

Tractable Class of a Problem of Goal Satisfaction inMutual Exclusion Network
Pavel SurynekFaculty of Mathematics and Physics
Charles University, PragueCzech Republic

Outline of the talk
Problem definition - goal satisfaction in mutex network
Motivation by concurrent AI planning A special consistency technique A very special consistency technique
polynomial time (backtrack free) solving method Experimental evaluation
random problems concurrent planning problems
FLAIRS 2008 Pavel Surynek

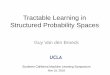
Problem definition - goal satisfaction in mutex network
A finite set of symbols S, a graph G=(V,E), wherevV S(v)S, and a goal gS
Find a stable set of vertices UV, such that uUS(u)g An NP-complete problem, unfortunately
FLAIRS 2008 Pavel Surynek
1
S(1)={a,b}
2
3
4
5
6
7
8
S(2)={c}
S(4)={h}
S(3)={d}
S(5)={a,b,j}
S(6)={e,f}
S(7)={d,g,h,i}
S(8)={g,h}
a b c d e f g h Goal g =
Solution U={2,5,6,7} (S(2)S(5)S(6)S(7)={c}{a,b,j}{e,f}{d,g,h,i}={a,b,c,d,e,f,g,h,i,j}g)
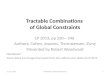
Why to deal with such an artificial problem? It is a problem that arises in artificial
intelligence Consider a concurrent planning problem
multiple agents, agents interfere with each other, parallel action execution
FLAIRS 2008 Pavel Surynek
Initial state Goal state

Structure of goal satisfaction problem
Concurrent planning problems solved using planning-graphs sequence of goal satisfaction problems goal satisfaction problems are highly structured
FLAIRS 2008 Pavel Surynek
Graph of the problem
small number of large complete sub-graphs
321
A B
45
X Y
Z

A special consistency technique
Clique decomposition V=C1C2 ... Ck, i Ci is a complete sub-graph at most one vertex from each clique can be
selected Contribution of a vertex v ... c(v) = |S(v)| Contribution of a clique C ... c(C) = maxvC c(v) Counting argument (simplest form)
if ∑i=1...k c(Ci) < size of the goal
►►► the goal is unsatisfiable
FLAIRS 2008 Pavel Surynek

A very special consistency technique (1)
The interference among symbols of cliques of the clique decomposition C1, C2,..., Ck is limited
FLAIRS 2008 Pavel Surynek
C1
C3
C4
C5
C6
C7
C8
C3
C4
C10
C11
C9
C2
C5
C12
symbols

A very special consistency technique (2)
Intersection graph of clique symbols is almost acyclic the problem is highly structured
If the clique intersection graph is acyclic the goal satisfaction problem can be solved in polynomial time (backtrack free)
FLAIRS 2008 Pavel Surynek
C1
C7C10C11C9
C3
C6
C5C4
C2
C12C8

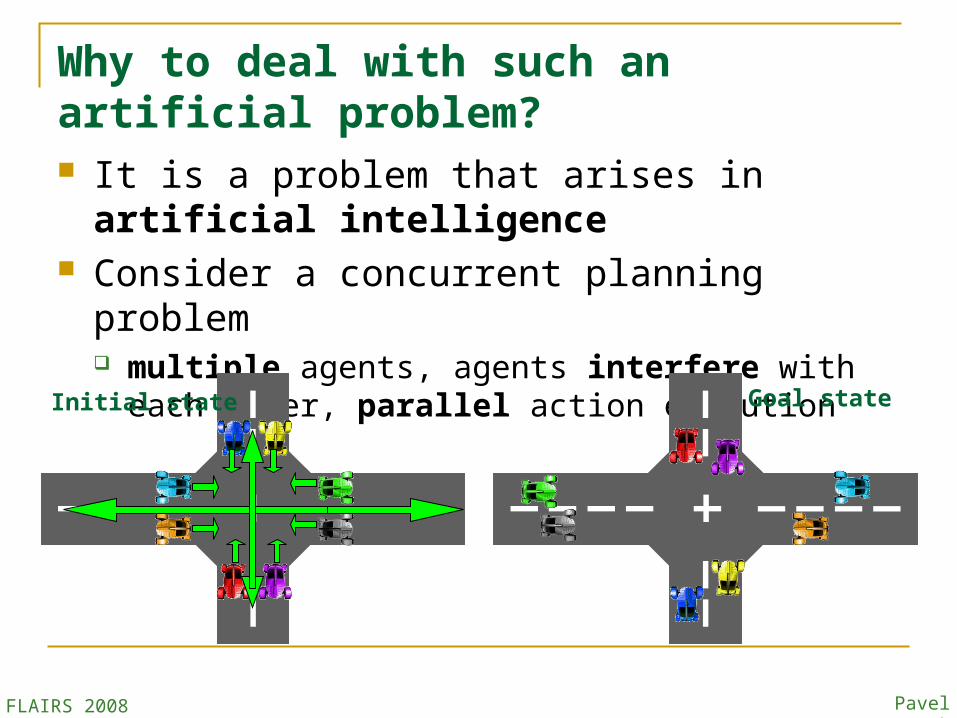
Experimental evaluation onrandom problems
FLAIRS 2008 Pavel Surynek
0.1
1
10
100
00.010.020.030.040.050.060.070.080.090.1
Arc-consistency
Projection consistencyTractable projection
Probability of random edges (m)
Solving time
Tim
e (
se
co
nd
s)
As structure is more dominant the proposed consistency technique becomes more efficient
m=0.08
m=0.04
m=0.00
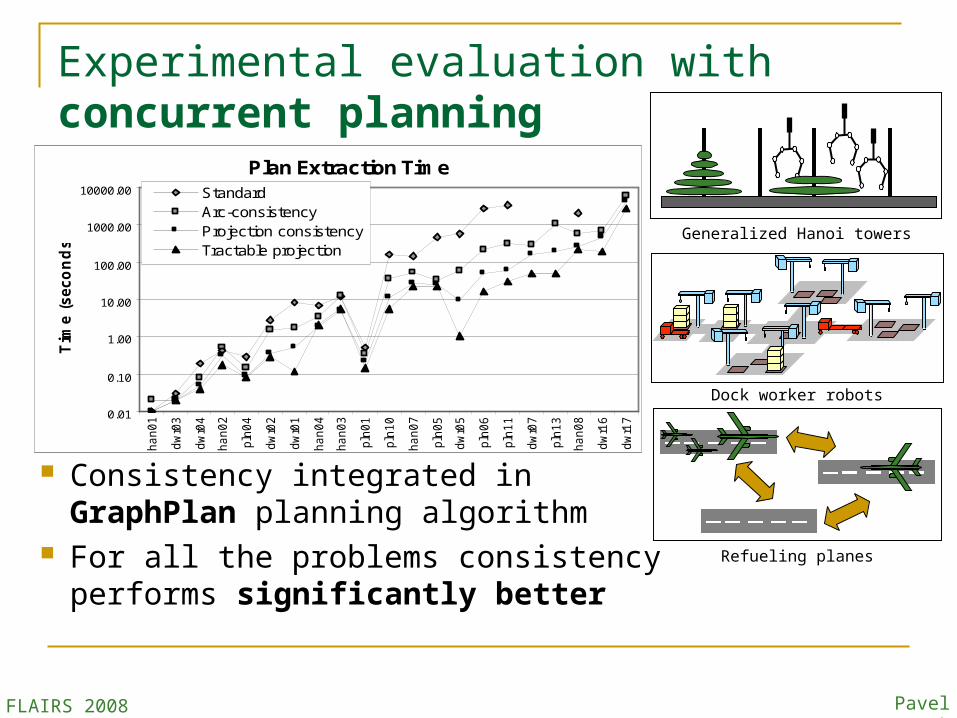
Experimental evaluation withconcurrent planning
Consistency integrated in GraphPlan planning algorithm
For all the problems consistency performs significantly better
FLAIRS 2008 Pavel Surynek
Plan Extraction Time
0.01
0.10
1.00
10.00
100.00
1000.00
10000.00
ha
n0
1
dw
r03
dw
r04
ha
n0
2
pln
04
dw
r02
dw
r01
ha
n0
4
ha
n0
3
pln
01
pln
10
ha
n0
7
pln
05
dw
r05
pln
06
pln
11
dw
r07
pln
13
ha
n0
8
dw
r16
dw
r17
Tim
e (
seco
nd
s)
StandardArc-consistencyProjection consistencyTractable projection
Generalized Hanoi towers
Dock worker robots
Refueling planes

Conclusions and future work
We proposed a (very) special consistency technique that can solve problems with acyclic clique intersection graphs in polynomial time
We evaluated the proposed technique experimentally on random problems and on problems arising in concurrent planning
For future work we want to identify more general structures and properties within problems than cliques and acyclicity of graph
FLAIRS 2008 Pavel Surynek






![Efficient and Tractable System Identification through ...ahefny/pubs/7_21_17_berkley.pdfEfficient and Tractable System Identification through Supervised ... PSIM [DAgger] RNN [BPTT]](https://img.pdfslide.net/doc/110x75/5af834ca7f8b9a2d5d8b4a79/efficient-and-tractable-system-identification-through-ahefnypubs72117-and.jpg)