Embed Size (px)
Citation preview

University of British ColumbiaCPSC 314 Computer Graphics
Jan-Apr 2007
Tamara Munzner
http://www.ugrad.cs.ubc.ca/~cs314/Vjan2007
Transformations II
Week 2, Wed Jan 17

2
Readings for Jan 15-22
• FCG Chap 6 Transformation Matrices• except 6.1.6, 6.3.1
• FCG Sect 13.3 Scene Graphs
• RB Chap Viewing• Viewing and Modeling Transforms until Viewing
Transformations
• Examples of Composing Several Transformationsthrough Building an Articulated Robot Arm
• RB Appendix Homogeneous Coordinates andTransformation Matrices
• until Perspective Projection
• RB Chap Display Lists

3
Review: Event-Driven Programming
• main loop not under your control• vs. procedural
• control flow through event callbacks• redraw the window now
• key was pressed
• mouse moved
• callback functions called from main loopwhen events occur• mouse/keyboard state setting vs. redrawing

4
Review: 2D Rotation
θ
(x, y)
(x_, y_)x_ = x cos(θ) - y sin(θ)y_ = x sin(θ) + y cos(θ)
ν counterclockwise, RHS
( ) ( )( ) ( )
−=
y
x
y
x
θθ
θθ
cossin
sincos
'
'

5
Review: 2D Rotation From Trig Identities
x = r cos (φ)y = r sin (φ)x_ = r cos (φ + θ)y_ = r sin (φ + θ)
Trig Identity…x_ = r cos(φ) cos(θ) – r sin(φ) sin(θ)y_ = r sin(φ) cos(θ) + r cos(φ) sin(θ)
Substitute…x _ = x cos(θ) - y sin(θ)y _ = x sin(θ) + y cos(θ)
θ
(x, y)
(x_, y_)
φ

6
Review: 2D Rotation: Another Derivation
θθ
θθ
cossin'
sincos'
yxy
yxx
+=
−=
xx
xx'
€
x'= A − B
BB
AA
(x_,y_)
(x,y)
€
A = x cosθθθ
xx

7
Shear
• shear along x axis• push points to right in proportion to height
x
y
x
y
+
=
′
′
?
?
??
??
y
x
y
x

8
Shear
• shear along x axis• push points to right in proportion to height
x
y
x
y
+
=
′
′
0
0
10
1
y
xsh
y
x x

9
Reflection
x x
+
=
′
′
?
?
??
??
y
x
y
x
• reflect across x axis• mirror

10
Reflection
• reflect across x axis• mirror
+
−=
′
′
0
0
10
01
y
x
y
x
x x
11
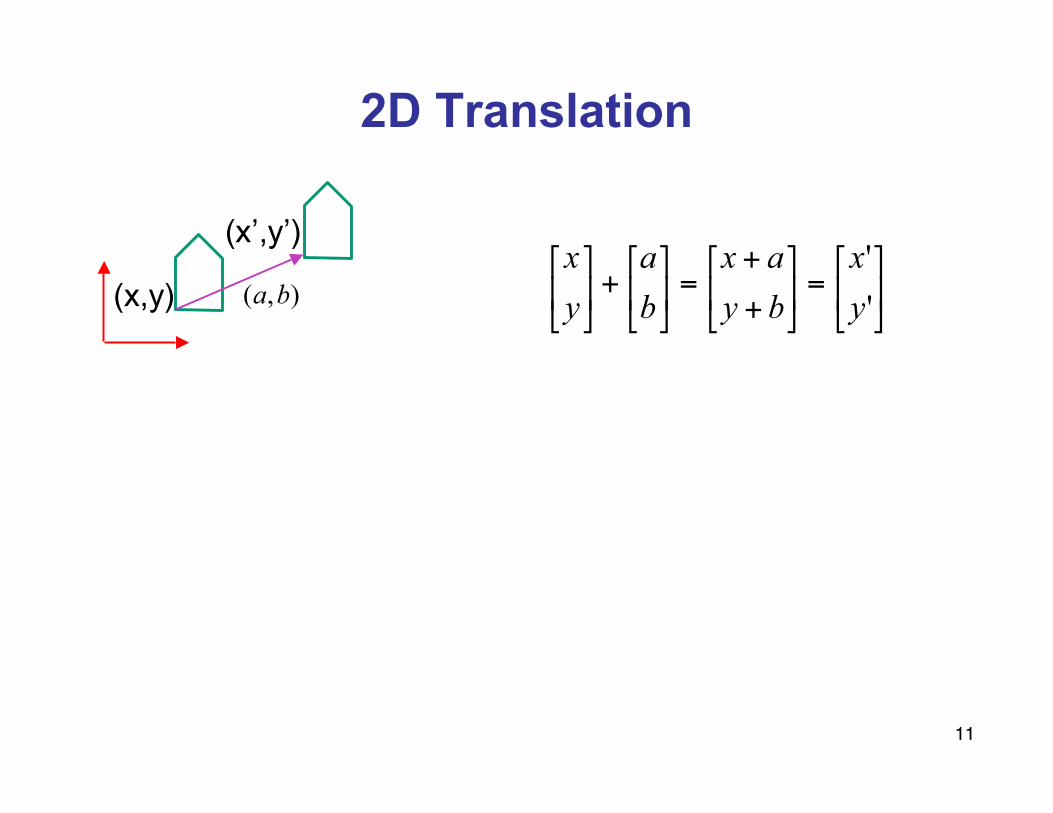
2D Translation
=
+
+=
+
'
'
y
x
by
ax
b
a
y
x),( ba(x,y)
(x’,y’)
12
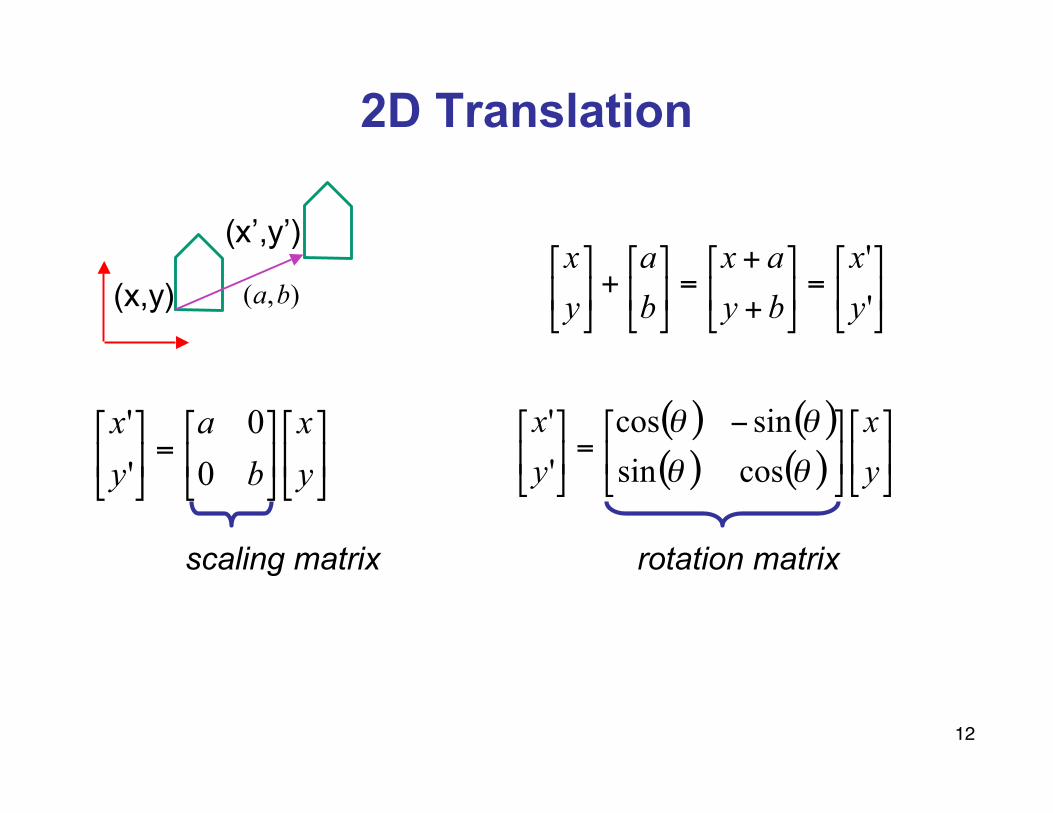
2D Translation
=
+
+=
+
'
'
y
x
by
ax
b
a
y
x),( ba(x,y)
(x’,y’)
( ) ( )( ) ( )
−=
y
x
y
x
θθ
θθ
cossin
sincos
'
'
=
y
x
b
a
y
x
0
0
'
'
scaling matrix rotation matrix

13
2D Translation
=
+
+=
+
'
'
y
x
by
ax
b
a
y
x),( ba(x,y)
(x’,y’)
( ) ( )( ) ( )
−=
y
x
y
x
θθ
θθ
cossin
sincos
'
'
=
y
x
b
a
y
x
0
0
'
'
scaling matrix rotation matrix
vector addition
matrix multiplicationmatrix multiplication

14
2D Translation
=
+
+=
+
'
'
y
x
by
ax
b
a
y
x),( ba(x,y)
(x’,y’)
( ) ( )( ) ( )
−=
y
x
y
x
θθ
θθ
cossin
sincos
'
'
=
y
x
b
a
y
x
0
0
'
'
scaling matrix rotation matrix
=
'
'
y
x
y
x
dc
ba
translation multiplication matrix??
vector addition
matrix multiplicationmatrix multiplication

15
Linear Transformations
• linear transformations are combinations of• shear• scale• rotate• reflect
• properties of linear transformations• satisifes T(sx+ty) = s T(x) + t T(y)• origin maps to origin• lines map to lines• parallel lines remain parallel• ratios are preserved• closed under composition
=
y
x
dc
ba
y
x
'
'dycxy
byaxx
+=
+=
'
'

16
Challenge
• matrix multiplication• for everything except translation
• how to do everything with multiplication?• then just do composition, no special cases
• homogeneous coordinates trick• represent 2D coordinates (x,y) with 3-vector (x,y,1)

17
Homogeneous Coordinates
• our 2D transformation matrices are now 3x3:
−
=
100
0)cos()sin(
0)sin()cos(
θθ
θθ
otationR
=
100
00
00
b
a
caleS
=
100
10
01
y
x
T
T
ranslationT
+
+
=
∗+∗
∗+∗
=
11
11
11
1100
10
01
by
ax
by
ax
y
x
b
a
• use rightmost column

18
Homogeneous Coordinates Geometrically
• point in 2D cartesian
xx
yy
y
x

19
Homogeneous Coordinates Geometrically
• point in 2D cartesian + weight w =point P in 3D homog. coords
• multiples of (x,y,w)
• form a line L in 3D
• all homogeneous points on Lrepresent same 2D cartesian point
• example: (2,2,1) = (4,4,2) =(1,1,0.5)
),,( wyx
homogeneoushomogeneous
),(w
y
w
xcartesiancartesian
/ w/ w
xx
yy
ww
w=w=11
⋅
⋅
w
wy
wx
1
y
x

20
Homogeneous Coordinates Geometrically
• homogenize to convert homog. 3Dpoint to cartesian 2D point:• divide by w to get (x/w, y/w, 1)
• projects line to point onto w=1 plane
• like normalizing, one dimension up
• when w=0, consider it as direction
• points at infinity
• these points cannot be homogenized
• lies on x-y plane
• (0,0,0) is undefined
),,( wyx
homogeneoushomogeneous
),(w
y
w
xcartesiancartesian
/ w/ w
xx
yy
ww
w=w=11
⋅
⋅
w
wy
wx
1
y
x

21
Affine Transformations
• affine transforms are combinations of• linear transformations• translations
• properties of affine transformations• origin does not necessarily map to origin• lines map to lines• parallel lines remain parallel• ratios are preserved• closed under composition
=
w
y
x
fed
cba
w
y
x
100
'
'

22
Homogeneous Coordinates Summary
• may seem unintuitive, but they makegraphics operations much easier
• allow all affine transformations to beexpressed through matrix multiplication• we’ll see even more later...
• use 3x3 matrices for 2D transformations• use 4x4 matrices for 3D transformations

23
3D Rotation About Z Axis
−
=
11000
0100
00cossin
00sincos
1
'
'
'
z
y
x
z
y
x
θθ
θθ
glRotatef(angle,x,y,z);glRotatef(angle,x,y,z);
θ
P
y
x
zz
yxy
yxx
=
+=
−=
'
cossin'
sincos'
θθ
θθ
θθ
'P
glRotatef(angle,0,0,1);glRotatef(angle,0,0,1);
ν general OpenGL command
ν rotate in z

24
3D Rotation in X, Y
−=
11000
0cossin0
0sincos0
0001
1
'
'
'
z
y
x
z
y
x
θθ
θθ
glRotatef(angle,1,0,0);glRotatef(angle,1,0,0);around x axis:
−=
11000
0cos0sin
0010
0sin0cos
1
'
'
'
z
y
x
z
y
x
θθ
θθ
glRotatef(angle,0,1,0);glRotatef(angle,0,1,0);around y axis:
25
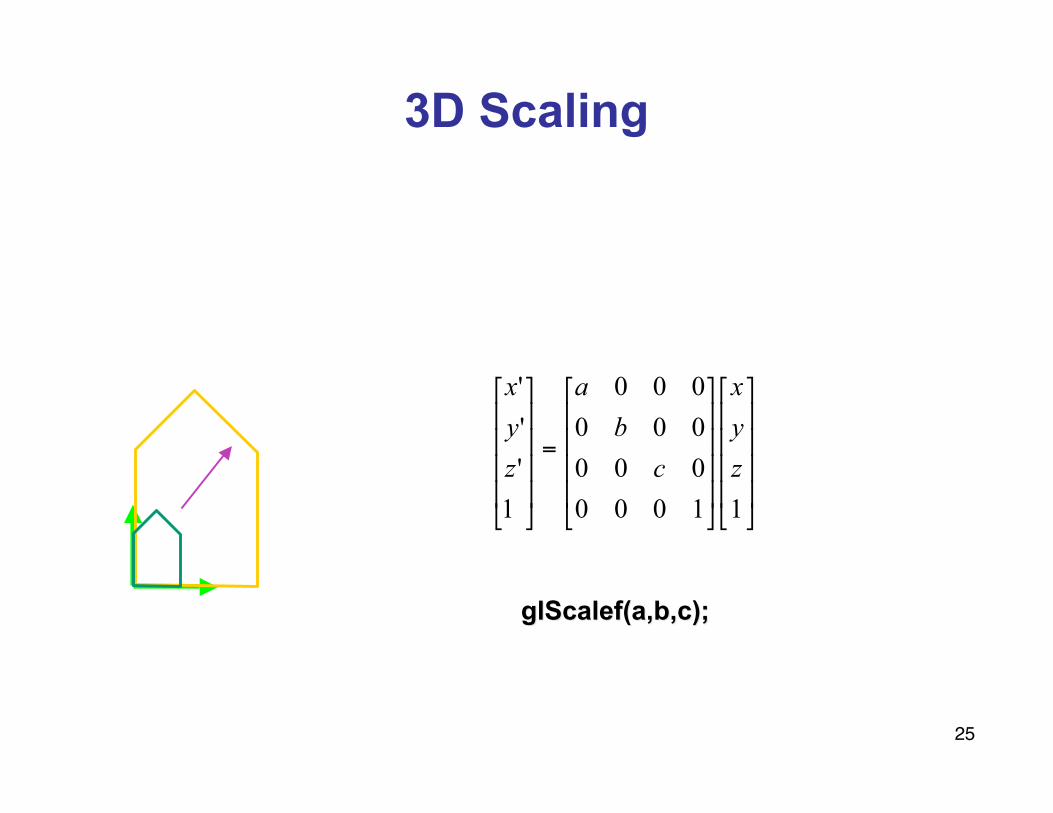
3D Scaling
=
11000
000
000
000
1
'
'
'
z
y
x
c
b
a
z
y
x
glScalef(a,b,c);glScalef(a,b,c);

26
3D Translation
=
11000
100
010
001
1
'
'
'
z
y
x
c
b
a
z
y
x
>< cba ,,
glTranslatef(a,b,c);glTranslatef(a,b,c);

27
3D Shear
• shear in x
• shear in y
• shear in z
€
xshear(sy,sz) =
1 sy sz 00 1 0 00 0 1 00 0 0 1
€
yshear(sx,sz) =
1 0 0 0sx 1 sz 00 0 1 00 0 0 1
€
zshear(sx,sy) =
1 0 0 00 1 0 0sx sy 1 00 0 0 1

28
Summary: Transformations
=
11
1
1
1
1
'
'
'
z
y
x
c
b
a
z
y
x
translate(a,b,c)translate(a,b,c)
−=
11
cossin
sincos
1
1
'
'
'
z
y
x
z
y
x
θθ
θθ
),(Rotate θx
=
111
'
'
'
z
y
x
c
b
a
z
y
x
scale(a,b,c)scale(a,b,c)
−
1
cossin
1
sincos
θθ
θθ
),(Rotate θy
−
1
1
cossin
sincos
θθ
θθ
),(Rotate θz
29
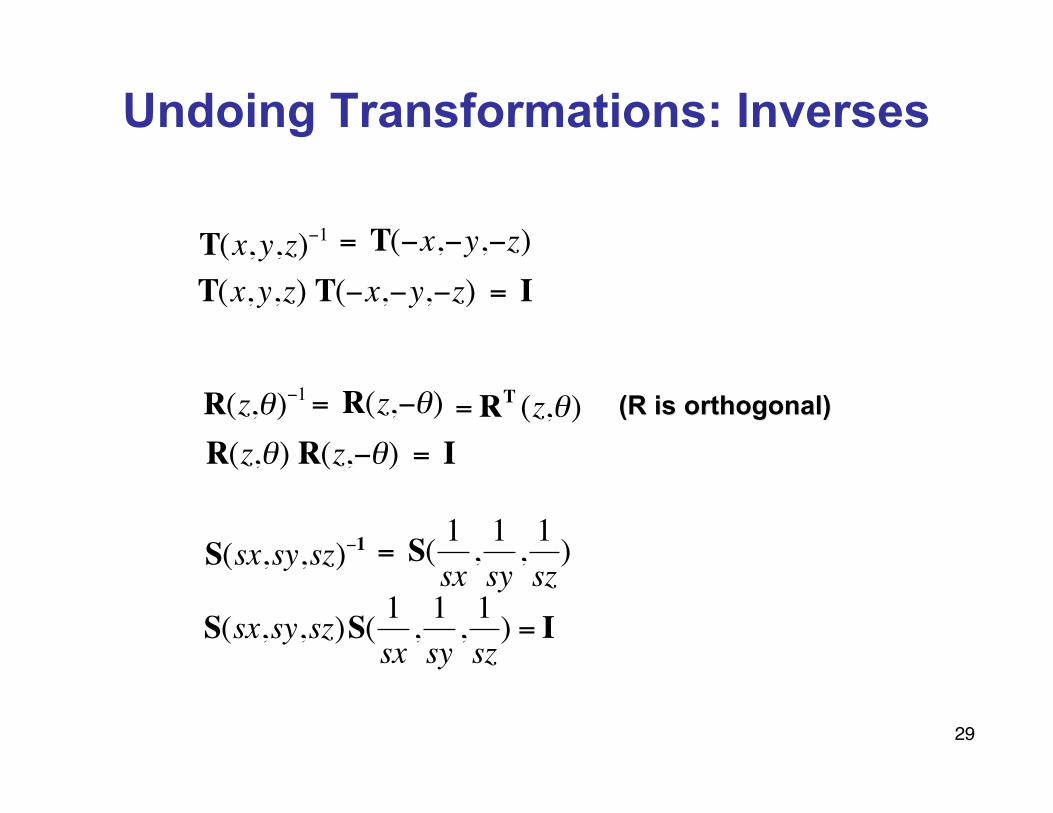
Undoing Transformations: Inverses
€
T(x,y,z)−1
€
= T(−x,−y,−z)
€
T(x,y,z) T(−x,−y,−z) = I
€
=RT (z,θ)
€
= R(z,−θ)
€
R(z,θ) R(z,−θ) = I
€
S(sx,sy,sz)−1
€
= S( 1sx, 1sy, 1sz)€
R(z,θ)−1 (R is orthogonal)(R is orthogonal)
€
S(sx,sy,sz)S( 1sx, 1sy, 1sz) = I

30
Composing Transformations

31
Composing Transformations
• translation
€
T1= T(dx1,dy1) =
1 dx11 dy11
1
€
T2 = T(dx 2,dy 2) =
1 dx21 dy21
1
€
P' '= T2•P'= T2•[T1•P] = [T2•T1]•P,where
T2•T1=
1 dx1 + dx21 dy1 + dy21
1
so translations addso translations add

32
Composing Transformations
• scaling
• rotation
=•∗
∗
1
112
21
21
sysy
dxsx
SSso scales multiplyso scales multiply
++
+−+
=•
1
1
)21cos()21sin(
)21sin()21cos(
12θθθθ
θθθθ
RRso rotations addso rotations add

33
Composing Transformations
Ta Tb = Tb Ta, but RaTa Tb = Tb Ta, but Ra Rb Rb !=!= Rb Rb Ra and TaRa and Ta Rb Rb !=!= Rb Rb TaTa

34
Composing Transformations
€
jFFhh
FFWW
suppose we wantsuppose we want
€
i
€
i€
j

35
Composing Transformations
€
jFFhh
FFWW
suppose we wantsuppose we want
FFWW
FFhh
Rotate(z,-90)Rotate(z,-90)
€
p'=R(z,−90)p
€
i
€
i€
j

36
Composing Transformations
€
jFFhh
FFWW
suppose we wantsuppose we want
FFWW
FFhh
Rotate(z,-90)Rotate(z,-90)
€
p'=R(z,−90)p
€
i
€
i€
j FFWW
FFhh
Translate(2,3,0)Translate(2,3,0)
€
p''= T(2,3,0)p'
37
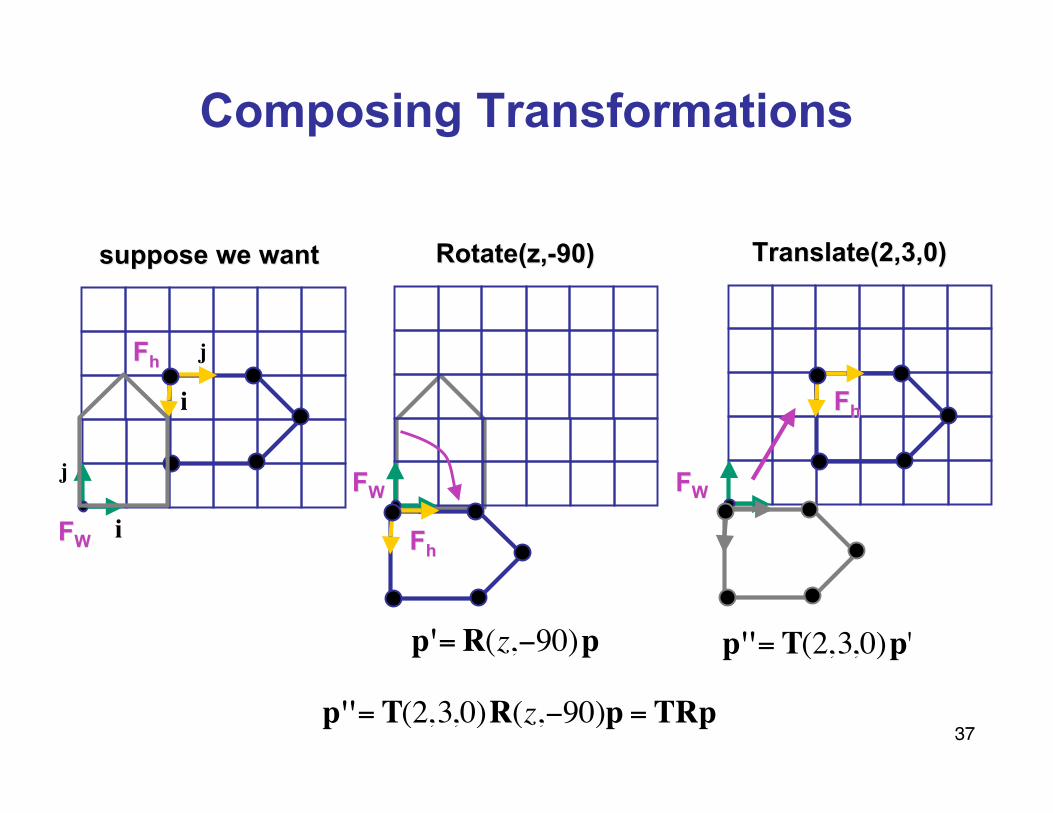
Composing Transformations
€
jFFhh
FFWW
suppose we wantsuppose we want
FFWW
FFhh
Rotate(z,-90)Rotate(z,-90)
€
p'=R(z,−90)p
€
i
€
i€
j FFWW
FFhh
Translate(2,3,0)Translate(2,3,0)
€
p''= T(2,3,0)p'
€
p''= T(2,3,0)R(z,−90)p = TRp

38
€
p'= TRpComposing Transformations
• which direction to read?• right to left
• interpret operations wrt fixed coordinates
• moving object
• left to right• interpret operations wrt local coordinates
• changing coordinate system

39
€
p'= TRpComposing Transformations
• which direction to read?• right to left
• interpret operations wrt fixed coordinates• moving object
• left to right• interpret operations wrt local coordinates• changing coordinate system
OpenGL pipeline ordering!

40
€
p'= TRpComposing Transformations
• which direction to read?• right to left
• interpret operations wrt fixed coordinates• moving object
• left to right• interpret operations wrt local coordinates• changing coordinate system• OpenGL updates current matrix with postmultiply
• glTranslatef(2,3,0);• glRotatef(-90,0,0,1);• glVertexf(1,1,1);
• specify vector last, in final coordinate system• first matrix to affect it is specified second-to-last
OpenGL pipeline ordering!

41
(2,1)(1,1)
(1,1)
changing coordinate system
moving objecttranslate by (-1,0)
Interpreting Transformations
• same relative position between object andbasis vectors
intuitive?
OpenGL

42
Matrix Composition
• matrices are convenient, efficient way to representseries of transformations• general purpose representation• hardware matrix multiply• matrix multiplication is associative
• p_ = (T*(R*(S*p)))• p_ = (T*R*S)*p
• procedure• correctly order your matrices!• multiply matrices together• result is one matrix, multiply vertices by this matrix• all vertices easily transformed with one matrix multiply

43
Rotation About a Point: Moving Object
FFWW
translate p translate p to originto origin
θ
€
p = (x,y)
rotate about rotate about p by : p by :θ
rotate aboutrotate aboutoriginorigin
translate p translate p backback
€
T(x,y,z)R(z,θ)T(−x,−y,−z)

44
Rotation: Changing Coordinate Systems
• same example: rotation around arbitrarycenter

45
Rotation: Changing Coordinate Systems
• rotation around arbitrary center• step 1: translate coordinate system to rotation
center

46
Rotation: Changing Coordinate Systems
• rotation around arbitrary center• step 2: perform rotation

47
Rotation: Changing Coordinate Systems
• rotation around arbitrary center• step 3: back to original coordinate system

48
General Transform Composition
• transformation of geometry into coordinatesystem where operation becomes simpler• typically translate to origin
• perform operation
• transform geometry back to originalcoordinate system

49
Rotation About an Arbitrary Axis
• axis defined by two points
• translate point to the origin
• rotate to align axis with z-axis (or x or y)
• perform rotation
• undo aligning rotations
• undo translation

Arbitrary Rotation
• problem:• given two orthonormal coordinate systems XYZ and UVW
• find transformation from one to the other• answer:
• transformation matrix R whose columns are U,V,W:
€
R =
ux vx wx
uy vy wy
uz vz wz
Y Z
X
W
V
U

51
Arbitrary Rotation
• why?
• similarly R(Y) = V & R(Z) = W€
R(X) =
ux vx wx
uy vy wy
uz vz wz
100
= (ux,uy,uz)=U





























