Embed Size (px)
Citation preview

erless four-w application in AC-DC-A
M.E.Fraser C.D.Manning B. M . We1 Is
Indexing terms: AC-DC-AC converter, Current-mode control, Four-wire rectlfer, P WM rectlfier, Transformerless converter, Uninterruptible power supply
Abstract: The paper introduces a transformerless four-wire power-factor-corrected boost rectifier which does not draw low-order harmonic currents from the supply neutral. The four-wire rectifier topology and control is described. The main application of such a rectifier is a new transformerless, four-wire AC-DC-AC converter for uninterruptible power supplies. Simulation results show the steady-state and dynamic response of the four-wire rectifier and the four- wire AC-DC-AC converter.
List of symbols
a, b, c = denotes three phase quantities d, q, n = denotes rotating reference frame quantities ea,b,c = instantaneous AC supply phase voltage Vdc = DC bus voltage Vph= RMS AC supply phase voltage V, = peak inverter output phase voltage Vr = DC bus ripple voltage 4l,b.c ' ~ - instantaneous AC supply currents ini = inverter neutral current in, = supply neutral current Ai = boost inductor pk-pk ripple current I(t) = time varying amplitude of AC supply currents iai,bi,ci = peak inverter output current I , = filter capacitor ripple current ldc = DC load current (of rectifier) Ih = ripple current harmonics generated by converter IL = filter inductor ripple current I,, = peak inverter neutral current 1, = peak inverter output current lph = RMS AC supply phase current I,, = nth harmonic of supply current 0 IEE, 1995 IEE Proceedings online no. 19952278 Paper first received 3rd April 1995 and in revised form 1st August 1995 M.E. Fraser and C.D. Manning are with the Loughborough University of Technology, Department of Electronic & Electrical Engineering, Lough- borough, Leics. LE1 1 3TU, UK B.M. Wells is with Emerson Electric UK Ltd., Swindon, Wiltshre SN2 6DX, UK
Cdc = DC bus capacitance Cr = rectifier filter capacitance Cfi = inverter filter capacitance Lboost = per phase boost inductance Lr = rectifier filter inductance Lfi = inverter filter inductance o = angular frequency of supply f = supply frequency f, = converter switching frequency G, = current loop feedback gain G, = voltage loop feedback gain Ki = integral constant of PI controller Kp = proportional constant of PI controller P, = inverter power
1 Introduction
Three-phase solid-state AC-DC-AC converters have been used for many years in uninterruptible power sup- plies (UPS) and induction motor drives. As three-phase induction motors may be driven from a three-wire source and assuming galvanic isolation is not required, a transformerless, three-wire AC-DC-AC converter is commonly used.
An uninterruptible power supply, however, effec- tively duplicates the mains utility. A double-conversion UPS can operate with a three-wire input rectifier, but must have a four-wire output. Even when galvanic iso- lation is not required a three-phase transformer is
Ldc Y-delta
t ransformer
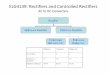
Fig. 1 AC-DC-AC converter with Y-delta transformer
required on the front or back end of the converter and the load neutral connection is connected directly to the star point of the supply thus preventing the load neu- tral from floating and providing a path for fault cur-
IEE Proc.-Elcctr. Power Appl., Vol. 142, No 6, November 1995 410

rents to flow via the earth connection. The transformer prevents current flowing in the supply neutral during normal operating conditions. Fig. 1 shows a typical four-wire converter configuration. The main limitation of this type of converter are the presence of the three- phase transformer and the considerable low order har- monic currents [l] drawn from the supply by the diode bridge rectifier. Due to the desire to reduce cost, size and weight, and due to guidelines, recommendations and regulations [2] stating a limitation of the harmonic stress on the mains supply by power electronic systems, the development of cost-effective converter concepts with high power density and low influence on the mains becomes increasingly important.
Removal of the transformer in a three-phase UPS would lead to compact converters with significant sav- ings in weight and cost. However, removal of the trans- former in the circuit of Fig. 1 would lead to harmonics flowing in the supply neutral, mainly third harmonic of the supply frequency. If the diode bridge rectifier is replaced by a four-wire PWM active bridge boost recti- fier, this will facilitate the removal of the transformer while allowing sinusoidal currents to be drawn from the mains supply at unity power factor thus effectively emulating a resistive load to the supply.
Many papers have been written about the three-wire three-phase boost rectifier and its control [3-71. The rectifier consists of six switches, which may be IGBTs, GTOs or bipolar junction transistors, and six diodes allowing for bidirectional power flow. The line induc- tors provide energy storage to allow the circuit to act as a boost regulator. The switches in one leg are switched alternatively using a pulse width modulation (PWM) control scheme, with the proviso that a dead- band is introduced when considering real switches to allow for the turn-off time of a switch. The PWM sets up a voltage across the line inductors to control the shape of the supply current as required. However, a four-wire rectifier is required and the aim of the paper is to introduce a transformerless four-wire PWM power factor corrected reversible boost rectifier and its control strategy, and discuss its application in AC-DC-AC UPS systems.
'dc
I 1"s
Fig. 2 Transformerless four-wire PFCR
2 Transformerless four-wire power-factor- corrected reversible boost rectifier
2. I Operating principles The four-wire power factor corrected boost rectifier (PFCR) is shown in Fig. 2. This is similar to the three- wire PFCR, but provides a neutral connection from the star point of the supply to the centre point of the DC bus using a centre-tapped capacitor. The topology is similar to a four-wire inverter using centre-tapped
capacitors for the load neutral connection [8]. Connect- ing the DC centre-point to the supply neutral can allow harmonics currents to flow in the supply neutral mainly third harmonic [7] owing to the diodes in the bridge. This can be overcome for the four-wire PFCR if
To prevent any low-order harmonic currents flowing in the neutral it is now up to the switch controllers to shape the line currents accordingly. If the three sinusoi- dal line currents are controlled to keep the amplitudes equal and each with a phase of 120" apart, the neutral current will always be zero: ins = 2, + i b + 2,
= I ( t ) [sin (ut) + sin(ut - 120') +sin(& - 240°)]
The only neutral current flowing will be a switching frequency ripple current from the summation of the three phases set by the size of the boost inductance in the lines.
This system requires current controllers with a 'good' steady-state and dynamic response to maintain three equally balanced sinusoidal currents during both steady-state and dynamic operation.
= o (2)
2.2 PFCR control in stationary reference frame A current-mode control scheme is required for the line currents. There are different forms of current-mode control including peak current-mode control, hysteresis control and average current-mode control. Average current-mode control has significant advantages over hysteresis and peak current-control including constant switching frequency, improved noise immunity and true average current-mode control afforded by sensing and controlling the average inductor current [9]; thus aver- age current-mode control of the line boost inductor current is used here.
switches
ase "d*C
c phase
t t i c t -wM- sin(w t-240)
Fig. 3 Average current-mode control
The neutral connection in the four-wire PFCR decouples the three phases and allows individual con- trol of each phase. Fig. 3 shows the average current mode control system. The inductor current is measured and compared to a reference. The current error is passed through a proportional and integral (PI) con- troller providing high gain at low frequencies, but hav- ing a filtering effect on the high-frequency ripple current. This signal is compared to a triangular carrier wave to generate the required pulse width modulated (PWM) signal to control the switches.
IEE Proc-Electr. Power Appl,. Vol. 142, No. 6, November 199s 41 1

The average current-mode controllers form the inner current loops. The DC bus voltage is controlled by measuring the DC bus voltage and comparing it to a reference. This error signal is passed through a PI con- troller which then forms the current amplitude refer- ence required for all three inner current loops. The current amplitude reference is multiplied by three sinu- soidal templates each with a phase 120" apart to form the true current references. As a unity power factor sys- tem is required each sinusoidal reference is in phase with the respective supply phase voltage. The constants of the PI controllers are set to produce a stable system with good steady-state and dynamic response.
2.3 PFCR control in rotating reference frame To improve the steady-state and dynamic response of three phase converters the control may be operated in the rotating d-q reference frame rather than the station- ary reference frame [l 11. The d-q reference frame trans- forms the time-varying quantities to time invariant quantities taking advantage of the high gain of the PI controller at DC. The direct axis (4 represents the active power flow in the system and the quadrature axis (q ) represents the reactive power flow.
The d-q reference frame is suitable for three-wire con- verters. Four-wire converters require an additional axis to take into account the neutral current. The d-q-n ref- erence frame allows for a neutral connection and its use in a four-wire inverter is discussed in [12].
i;; 4yp-J-L i, -
' a ' b ' c Fig.4 Control in the d-q-n reference frame
switches
Fig. 4 shows the new PFCR control layout with the rotatingistationary reference frame transformations. The reference for the active current flow ii is derived from the voltage loop feedback. No transformation is required for the voltage loop control as the control sig- nals are DC. The reference for the reactive current i," is set to zero as unity power factor is required and the reference for the neutral current in* is set to zero. The transformations between stationary a-b-c and rotating d-q-n reference frames are:
i d q n = T ( 8 ) i u b c ( 3 )
iabc = T-'(O)idq, (4)
( 6 )
sine sin(O - 120") sin(8 - 240")
where
and 0 = ut
2.4 Boost inductance The switching action of the PWM rectifier gives a rip- ple current in the boost inductors. For an average cur- rent mode control scheme the ripple current varies over the cycle of the mains, the worse case being when the supply voltage e = 0. By approximating the boost inductor current ripple to a triangular wave it can be shown [lo] that the worse case ripple is
(Pk-Pk) (7) v d c
4 f s L b o o s t ai =
The ripple current is set by the value of the boost inductance and the switching frequency, but independ- ent of load. The required boost inductance is obtained from eqn. 7.
2.5 DC bus capacitance The DC bus is inherently free from low-order harmon- ics during steady-state resistive loading apart from the high-frequency ripple voltage. The ripple voltage requires only a relatively small amount of DC capaci- tance for smoothing. A larger DC capacitance is used though to hold up the DC bus during transient loading and to absorb cyclic power ripple from, say, an inverter load.
3 Ripple current filtering
3. I L-C input filter It has been shown in eqn. 7, that the line ripple current may be reduced by increasing the switching frequency or the value of the boost inductance. Increasing the switching frequency f , increases losses in the switches and f, must be kept relatively low for higher power switches. Increasing the size of the boost inductors not only increases cost, but also slows down the dynamics of the current loops. A front-end G C filter is a simple way of reducing the line and neutral ripple currents.
d Fig. 5 Four-wire PFCR with front-end L-C filtev
Fig. 5 shows the four-wire PFCR with the front end L-C filter. The additional attenuation achieved with use of the L-C filter may be calculated from the equiv- alent circuit shown in Fig. 6. Using Kirchoffs current
IEE Proc -Electr Power A p p l , Vol 142, No 6, November 1995 412

law and neglecting the resistance of the inductor the attenuation of the filter is given by
1 ( 8 )
IL - Ih 1 - (27r fs )” fc f
- -
Fig. 6 Equivalent circuit of L-C filter
3.2 Reactive power compensation The use of the input L-C filter causes a phase shift between the phase voltage and line current so the input displacement factor becomes less than unity. The input displacement factor will also vary with load.
The L-C filter draws reactive power from the supply. The equivalent impedance of the filter will be
(9)
The reactive current drawn from the supply will be T I
(10) - “Ph Ireacttoe ~ -
IZf I If the reactive power drawn from the L-C filter is con- siderable then the PFCR can be made to compensate for it. As Zf is predominantly capacitive at 50Hz the reactive current drawn by the filter will be capacitive. The PFCR can be made to draw reactive power from the supply which would cancel that from the filter and is a relatively simple task when operating in the d-q-n reference frame. The reference iq* representing the reac- tive current shown in Fig. 4 can be changed from zero to
a: = -V~V, ,WC~ (11) It is worth*noticing that by appropriate choice of the reference iq the converter can be made to compensate for other equipment connected to the supply which draws reactive current. The converter switches, how- ever, must be rated higher.
I n s In1
Fig. 7 Transformerless four-~~irt . AC-DC-AC converter
4 Transformerless four-wire AC-DC-AC converter
4.1 AC-DC-AC converter topology The main application of a transformerless four-wire PFCR is the transformerless four-wire AC-DC-AC
IEE Prac -Electr Power Appl , Vol 142, Nu 6, November 1995
converter. The topology is shown in Fig. 7 consisting of the four-wire PFCR and a four-wire inverter. The four-wire inverter [8] has a similar topology to the four-wire PFCR used here and also allows bidirectional power flow. An L-C filter is used on the output of the inverter to reduce the high frequency ripple compon in the output voltage.
There are many methods of four-wire PWM inverter control and most of these are suitable for the four-wire AC-DC-AC converter. In this case an average current- mode controller is used to complement that of the PFCR [13]. The filter inductor current is controlled using three average current-mode controllers to form the inner loops. Three outer loops control the output voltages using proportional and integral controllers. Due to the decoupling effect of the fourth wire each of the three phases is individually controlled.
The supply neutral and load neutral are connected together and so remain at the same potential; no trans- former is required. Even when the inverter load is unbalanced causing a current to flow in the load neu- tral the supply neutral has no current flowing in it apart from a small amount of switching frequency rip- ple current.
’dc
I r ( t )
inverter
Fig.% Equivalent DC bus capacitance
4.2 Required DC bus capacitance with unbalanced load During any unbalanced load a second-harmonic ripple voltage occurs across the DC bus. The larger the unbalance the greater the ripple. Fig. 8 shows an equivalent circuit of the DC bus capacitors where the two DC capacitors are now lumped as one so that C = Cd,/2. Neglecting the high-frequency switching compo- nents of voltage and currents, it can be shown that the output power from the inverter is
where a is the phase angle of the neutral current rela- tive to the red phase supply voltage. If the power in the DC bus supplied to the inverter is equated to the inverter output power and neglecting the relatively small DC bus ripple voltage in the calculation of DC bus-power then:
V O Z d c ( t ) = I d c - Z r ( t ) = - [ I a t f ~ b z + I c z - I n z cos(2wt ta ) ] 2 v d c
(13) Assuming the DC power required by the inverter is supplied by the rectifier and the pulsating power required by the inverter is obtained from the DC bus capacitance then the capacitor ripple current is given by
41 3

and the ripple voltage by
sin(2wt + a) (15) C 87rf cvdc
Therefore the peak ripple voltage across the DC bus due to the unbalanced load of the inverter with C replaced by CdJ2 is
4.3 Supply-line harmonic distortion caused by DC bus ripple voltage during an unbalanced load The DC bus ripple voltage due to an unbalanced load can cause supply line harmonic currents to flow. The voltage ripple (which is a second harmonic of the sup- ply frequency) is fed back in the voltage loop, passed through a PI controller and then forms part of the cur- rent reference along with the DC error. This current reference is then multiplied by a sine wave template.
The feedback signal due to the voltage ripple is
Vf, = G,V, sin(2wt + a ) (17) where G, is the feedback gain of the voltage loop and, assuming the harmonics in the supply current has negli- gible effect on the DC bus voltage, V, is given in eqn. 16. The gain of the PI controller in the voltage loop at the second-harmonic frequency can be repre- sented as
(18)
Multiplying the feedback signal by the gain of the PI controller in the voltage loop and also by the sine wave template (sin a t in the red phase) and dividing by the current loop feedback gain Gi then the current refer- ence in the red phase due to the voltage ripple is
- - GprG,V, [sin(3wt + cli + p) - sin(wt + cli + p)] 2G,
(19) where p is the phase lag of the PI controller. Assuming the rectifier can follow the reference exactly then the red phase supply current will contain a fundamental and third harmonic and similarly in the other two phases. Therefore, the peak of the third-harmonic cur- rent in the supply is
4.4 Other harmonics on DC bus and supply currents during an unbalanced load A 50Hz ripple current flows through the two DC capacitors during an unbalanced load and this results in a 50Hz ripple voltage across each capacitor, most of which cancels when seen overall across the DC bus. If the capacitors have different capacitances this will accentuate the size of the 50Hz ripple component.
The main effect of this small amount of 50Hz DC bus ripple is that it can be fed back to the current con- trollers via the voltage feedback loop. When this 50Hz component is multiplied by the 50Hz templates this can
414
result in current demands with a DC component and a 100Hz component.
To reduce the effects of either a 100 or 50Hz compo- nent of DC bus ripple voltage occurring in the current demands the DC bus ripple components should be reduced or a filter, such as a notch filter, should be used in the voltage feedback path.
5 Simulation results
Time simulations have been run using the SABER sim- ulation software for a 5OkVA PFCR and a 50kVA AC-DC-AC converter supplied from a three-phase 50Hz AC source and providing a three-phase output voltage at a frequency of 50Hz.
The proportional and integral (PI) compensators are chosen so as to produce a stable system with good steady-state and dynamic response. The PI compensa- tors are represented in the Laplace domain as
For switching power supplies the slope of the PWM comparator input must be limited to the slope of the triangular-wave carrier waveform most of which slope is due to the boost inductor ripple current. This pre- vents multiple switchings of the converter (switching faster than that specified by the frequency of the trian- gular wave) and subharmonic oscillations.
The stability of the current loops is mainly depend- ant on the value of the boost inductance in the PFCR and filter inductance in the inverter. The stability of the voltage loop is mainly dependant on the size of the DC capacitors in the PFCR and filter capacitors in the inverter. The bandwidth of the voltage loop is set to about five times lower than the bandwidth of the cur- rent loop to prevent the current loop 'chasing' the volt- age loop and to maintain stability in the voltage loop.
The feedback signals of voltage and current in the converters obviously have to be scaled down to accept- able low-voltage signal levels. In these simulations per unit values of the nominal maximum currents and volt- ages are used by appropriate scaling factor gains in the feedback loops.
5. I The four-wire PFCR The PFCR used has the following parameters:
Lboost = 1 mH Cdc = 3 mF (per rail)
f, = 15kHz The control scheme chosen for the simulation uses the rotating d-q-n reference frame model and the control loops have the following constants:
voltage loop current loop K p = 5 K p = 1
K, = 1000 rads-' K' = 30,000 rads-' feedback constant = 1/800 feedback constant = 1/100 Figs. 9-11 shows the steady-state and transient time simulation results of the rectifier with a step load from 10 to 100% full load at 20ms followed by a step load from 100% to 10% full load at 60ms, giving the line currents, neutral current and DC bus voltage. It can be seen that the neutral current contains no low-order
Vph = 240V Vde = 800V
L f = 200pH C f = 20pF
IEE Proc -Electr Power Appl , Vol 142, No 6, November 1995

harmonics even during transients, only a small amount of high-frequency switching component is present.
> 820-
6 800
f: 780- a >
760
. . .
100
"- 50 c
E o L
3 -50
-100
0 10 20 30 40 50 60 70 80 90 100
-
time, ms Fig. 9 Four-wire powertfuctor-corrected boost rectifier with step loud change: Supply line currents
I -1 .ol
0 10 20 30 40 50 60 70 80 90 100 lime, ms
Fig. 10 Four-wire powertfuctor-corrected boost rectijier with step loud change: Supply neutral current
900 I I
7001 . . . . . 0 10 20 30 40 50 60 70 80 90 100
time, rns Fig. 1 1 change: DC bus voltage
Four-wire powertfuctor-corrected boost rectifier with step loud
5.2 Four-wire AC-DC-AC converter This converter uses the same parameters for the PFCR as used in Section 5.1. The inverter used has the follow- ing parameters:
The control scheme employed for the inverter uses the stationary reference frame model and the feedback loops have the following constants:
Lf = 350pH Cf = 2OpF Vo = 240V
voltage loop current loop
K p = 3 lip = 2
Ki = 3000 rads-' Ki = 15,000 rads-' feedback constant = 1/340 feedback const,ant = 1/100
Figs. 12-14 show the simulation results of the steady- state, transient and unbalanced loading of the AC- DC-AC converter. The red and blue phases of the out- put of the converter are kept at full load. The yellow phase has a step load from 100 to 50% at 20ms and 50 to 100% at 100ms. The supply line currents, supply neutral current i,,, DC bus voltage, output voltages, output filter inductor currents and inverter neutral cur- rent ini are shown in Figs. 12-17.
During the period between 20 and lOOms the inverter is under considerable unbalance. The inverter neutral current can be seen in Fig. 17. The amount of low- order supply neutral current (Fig. 13) is very small. The small amount that is there is due to the PFCR cur- rent controllers not tracking the current references ide- ally. This can be remedied with a current controller that has a higher gain at the lower frequencies.
IEE Proc.-Electr. Power Appl., Vol. 142, No. 6, November 1995
time, s Fig. 12 Four-wire AC-DC-AC converter with step load chunge: Supply line currents
1 .o 1 6 0.5 .a
" 0 F 2 - 0 . 5
I I
-1 .ol, 0 20 40 60 80 100 120 140
Fig. 13 Four-wire AC-DC-AC converter with step load change: Supplj neutral current
lime, rns
840 1 1
I 0 20 40 60 80 100 120 140
time, rns Four-wire AC-DC-AC converter with step loud change: DC Fig. 14
bus voltage
400
> 200 a; g o - ? -200
--- -3uu I
0 20 40 60 80 100 120 140 time, ms
Fig. 15 Four-wire AC-DC-AC converter with step loud change: Inverter output voltuges
100
50
C O F 5 -50
-1 00
c
U
0 20 40 60 80 100 120 140 time, ms
Fig. 16 Four-wire AC-DC-AC converter with step loud change: Output filter inductor currents
100 t 1 U 50
E- 0 0,
50 3 .,
-1 00 1 0 20 40 60 80 100 120 140
t ime, ms Fig. 17 Four-wire AC-DC-AC converter with step loud change: Inverter neutral current
415

The unbalanced load also means the output power is pulsating. This can be seen on the DC bus voltage as a 100Hz ripple in Fig. 14. The value of the second-har- monic ripple voltage given by a fast Fourier transform of the waveform during the unbalanced load is 11.7Vpk comparable to 11.3Vpk given by eqn. 16. It can also be seen that the ripple on the bus causes third harmonics to appear in the input as seen in Fig. 12. An FFT of the supply waveform gives a third harmonic current of 3.9Apk comparable to 3.7Apk given by eqn. 20. The DC bus ripple can be reduced by balanc- ing the instantaneous input power with the output power by improving the response of the voltage loop on the PFCR. This would cause the input power to
even more introducing further low-order har- in to the supply (not affecting the supply neu-
tral current as long as the current controllers are fast enough). If this is not acceptable then larger DC capac- itors can be used to absorb the harmonics.
6 feedforward on four-wire PFCR
Where current-mode controllers are implemented in rectifiers and inverters as the inner loop and a voltage loop forms the outer loop, feedforward of load current or Ioad power is often used to improve the steady-state and dynamic response owing to load variations. The feedforward signal effectively bypasses the slow voltage loop feedback signal.
For a three-phase PFCR the feedforward signal is obtained by balancing the DC output power with the required AC input power giving the amplitude of the required current as
Detrimental effects of load current
This signal is added to the current reference provided by the voltage loop.
6.7 Neutral cur;ent transients When a step-load is put on to the four-wire PFCR the feedforward signal Iff wiIl be a step demand for the cur- rent loops. As each of the three-phase currents have to change by different amounts and the current loop can- not follow a step demand instantaneously a temporary unbalance of supply currents may occur potentially
a large transient neutral current. Thus, it is ed that only a voltage feedback loap is used the references to the current loops, the
of the voltage loop being 5 - IO times Iower than the current loops.
6.2 Supply current harmonics In any three-phase AC-DC-AC converter when the DC bus is supplying a pulsating power to the load, say owing to a nonlinear load on the inverter or an unbal- anced load on the inverter, then using load current feedforward will demand the supply to draw pulsating power and draw low-order harmonic currents from the
7 Conclusions
This paper has introduced the transformerless four-wire power-factor-corrected rectifier. To prevent low order harmonic neutral currents from flowing eqn. 1 should be d and the three-phase currents should be kept balanced at 120” phase displacement, thus requir-
supply.
416
ing ‘good’ current controllers. The PFCR can be oper- ated in the d-q-n rotating reference frame to improve steady-state and dynamic response. Front-end L-C fil- ters may be used to achieve additional high-frequency ripple current attenuation in the supply lines and the neutral line. The main use of such a rectifier is a trans- formerless AC-DC-AC converter. Even with considera- ble unbalanced load on the inverter the load neutral current does not affect the supply neutral current.
The use of load current feedforward would allow a transient neutral current to occur during a step load change. When the load is demanding pulsating power, say when there is an unbalanced or nonlinear load, then load current feedforward could cause pulsating power to be drawn from the supply resulting in low- order harmonic currents occurring in the supply.
Simulation results using the SABER simulation soft- ware are shown for the PFCR and AC-DC-AC con- verter under steady-state and dynamic loading.
Units with power ratings of up to 80kVA can be achieved using readily available IGBTs switching at up to 20kHz. Multiple four-wire rectifiers may be paral- leled together owing to the current mode controller to increase the power rating.
The four-wire transformerless AC-DC-AC converter results in a compact, light and cheaper alternative for three-phase UPS which do not require galvanic isola- tion.
8 Acknowledgment
The research began in October 1992 and is supported by EPSRC (formerly SERC) and Emerson Electric UK Ltd. under a CASE award.
9 References
1 JONES, R ‘Sinusoidal rectification for harmonic elim the technology explained’ IEE colloquium on Th zndusti ial supplies harmonic pollution and recent de iemedies, 1993, digest 19931120, pp 811-8/10
2 KEY, T.S , and LAI, J S ’ ‘Comparison of standards and power supply design options for lmiting harmonic distortion in power systems’, IEEE Trans, 1993, IA-29, (4), pp. 688-695
3 GREEN, A W , BOYS, J.T , and GATES, G F ‘3-phase voltage sourced reversible rectifier’, IEE Proc B, 1988, 135, pp 362-370
4 FUKUDA, S , IWAJI, Y , and AOYAMA, T.. ‘Modelling and control of sinusoidal PWM rectifiers’ IEE European conference on Poir et electronics, 1993, pp 115-12!
5 GREEN, A W , and BOYS, J T Hysteresis current-forced three-phase voltage-sourced reversible rectifier’, IEE Proc B, 1989, 136, pp 113-120
6 KOLAR, J W., ERTL, H., EDELMOSER, K , and ZACH, F.C. ‘Analysis of the control behaviour of a bidirectional three-phase PWM rectifier system’ IEE European Conference on Power electronics, 1991, pp 2-095-2-100 ERTL. H , KOLAR, J.W , and ZACH, F C ‘Analysis of differ- ent current control concepts for forced commutated rectifier
8 DIVAN, D M ‘Inverter topologies and control techniques for sinusoidaI output power supplies’ IEEE 6th annual conference on Appliedpower electronics, 1991, pp 81-87
9 TANG, W , LEE, F C , and RIDLEY, R B ‘S ling of average current-mode control’ IEEE 7 ence on Applied poyer electvonics, 1992, pp. 141
10 CHRYSSIS, G High-frequency switching power supplies’ (McGraw-Hill, New York, USA)
11 MANNING, C.D ‘Control of UPS inverters on (ininterruptible power supplies, 1994, digest 3/5
12 YENKATARMANAN, G , DIVAN, D M , and JAHNS, T.M.. Discrete pulse modulation strategies for high-frqency inverter systems’. 20th annual IEEE conference on Power electronics,
13 FRASER, M E ~ and MANNING, C age current mode controlled PWM U factor Ioad’. IEE 5th mternationa1 conference on Power electron- ics and variablespeed drives, 1994, pp 661-667
7
(FCR)’ PCI, 1986, pp 195-217
~ 8 9 , pp 1013-1020
IEE Proc -Electr Power Appl , Vol 142, No 6, November 1995











![A 3-Transistor Low Power Rectifier for Wideband RF …...full bridge rectifier with four transistors at 130 nm technology is presented in [ 11]. An AC-DC rectifier, an impedance matching](https://img.pdfslide.net/doc/110x75/5fb53d083d01ce02be0e5523/a-3-transistor-low-power-rectifier-for-wideband-rf-full-bridge-rectifier-with.jpg)