Sistemas de transmision de potencia mecanica, cadenas de rodillos y poleas.
Ing. Eduardo Nio de Rivera
Ing. Eduardo Nio de Rivera
INTRODUCCION
Todas las mquinas requieren de una fuerza motriz. En la
antigedad sta vena de animales, seres humanos o los elementos, como
el viento o corrientes de agua. Hoy en da la gran mayora de las
mquinas son accionadas por motores ya sean elctricos, de de
combustin interna, hidrulicos o turbinas de gas o de vapor. Sin
importar de donde provenga la fuerza motriz, es necesario llevar el
movimiento y la fuerza, desde el lugar en que se generan hasta el
lugar en que se emplean.
En este primer artculo presentaremos los conceptos bsicos para
la seleccin los componentes mecnicos, como poleas y bandas, cadenas
y catarinas, reductores de velocidad, acoplamientos, embragues,
frenos, etc., que se encargan de la transmisin del movimiento entre
el motor y la mquina; en artculos futuros estudiaremos la funcin y
los criterios de seleccin para los diferentes componentes que hay
en el mercado.
En las herramientas ms sencillas la fuerza motriz se usa
directamente para realizar el trabajo deseado, en un cepillo para
madera, por ejemplo, se emplea el movimiento de la mano para
empujar la carga. En este caso, la carga se mueve a la velocidad de
la mano. Pero en la gran mayora de las mquinas la fuerza motriz se
genera en un lugar y en una forma que no pueden emplearse
directamente. En un taladro manual, por ejemplo, la fuerza motriz
se genera en una manivela pero se emplea en una broca. La manivela
estar colocada en forma tal que permita aprovechar la fuerza de la
mano que la hace girar, y trabajar a la velocidad que sta le
imprima, mientras que la broca estar colocada en la forma que ms
convenga para barrenar y girar a una velocidad que permita que el
trabajo se haga con mayor eficacia. Es necesario, por tanto,
transformar el movimiento de la manivela para que sea til para el
barrenado. En este caso la transformacin o transmisin del
movimiento se logra mediante un simple tren de engranes. Para
cubrir las necesidades de las diversas mquinas que existen, se ha
desarrollado una variedad muy amplia de elementos de
transmisin.
Cuando hablamos de fuerza motriz quedamos ligados a dos
principios fundamentales que rigen el movimiento. En primer lugar
tenemos las Leyes del Movimiento de Newton, que se resumen en la
ecuacin:
Fuerza igual a masa por aceleracin
Esta ecuacin se usa cuando un cuerpo se desplaza con movimiento
lineal. Para movimiento giratorio dicha ecuacin se convierte
en:
en la que T es el par, es el momento polar de inercia y es la
aceleracin angular.
Estrictamente hablando, estas son ecuaciones vectoriales, pero
cuando de trata de movimiento en lnea recta o giro sobre un eje
fijo, las ecuaciones se vuelven algebraicas, que es el caso de la
mayoria de los clculos relacionados a la seleccin de componentes
mecnicos.
Tenemos tambin el principio de la conservacin de la energa. Este
nos dice que en un sistema cerrado la energa que entra al sistema
es igual a la que sale del sistema ms el incremento en energa
dentro de ste. A la cantidad de energa que entra, sale o se acumula
en un sistema por unidad de tiempo se le denomina potencia.
En mayor o menor medida, los componentes mecnicos de transmisin
toman una parte de la energa que entra y la convierten en calor.
Cuando esto sucede, hay un incremento en la temperatura de operacin
hasta que se alcanza un equilibrio entre la energa que se est
absorbiendo y el calor que se disipa en la atmsfera o mediante algn
sistema de enfriamiento. Una vez alcanzado este equilibrio, la
potencia mecnica a la entrada ser igual a la potencia mecnica en la
salida ms la energa que se disipa en forma de calor. Visto a la
inversa, la potencia disponible a la salida de un componente de
transmisin es igual a la potencia a la entrada menos las prdidas
por calor.
La eficiencia nos dice cunta energa se pierde, de manera que la
potencia disponible a la salida de cada elemento ser igual a la
potencia a la entrada multiplicada por su eficiencia, esto es:
(la eficiencia , siempre ser menor a 1.0).
En movimiento lineal la potencia mecnica es igual a la fuerza
requerida, multiplicada por la velocidad del movimiento, y en
movimiento giratorio, es igual al par aplicado multiplicado por la
velocidad angular. Nuestra ecuacin, en el sistema ISO se convierte
en:
En donde:
T:
Par en Newtons-metro (Nm)
:
Velocidad angular en radianes por segundo (s)
:
Eficiencia por unidad (menor a 1.0)
P:
Potencia en watts (W)
Subndice s:
Condiciones a la salida
Subndice e:
Condiciones a la entrada
Comnmente la velocidad de giro, N, est dada en revoluciones por
minuto (rpm), y la potencia en kilowatts (kW). Las unidades ms
usadas en el sistema ingls son libras-pulgada (lb-in) para el par y
caballos de fuerza, Hp, para la potencia.
En el caso ms sencillo se tiene que seleccionar un motor y su
transmisin para una mquina que trabaja a una velocidad constante Ns
y requiere un par Ts, tambin cosntante. La potencia requerida en el
motor Pm, estar determinada por las siguientes ecuaciones
(utilizando las unidades indicadas en la parte final del rticulo
anterior):
Sistema Internacional
Sistema Ingles
La eficiencia vara bastante entre los diferentes elementos de
transmisin que se pueden usar para realizar el mismo trabajo. La
potencia requerida en el motor depender entonces de los componentes
que se empleen. Y al mismo tiempo, la transmisin debe tener la
capacidad necesaria para transmitir la potencia del motor. Esta
interdependencia hace que sea necesario seleccionar el motor y su
transmisin como un conjunto.
No todas las mquinas trabajan a velocidad y con carga
constantes, es comn que haya paros y arranques con cierta
frecuencia o que la velocidad o el par de trabajo varen.
Durante el arranque, el motor y la transmisin tienen que
acelerar la mquina desde un estado de reposo hasta la velocidad de
operacin; esto probablemente implique un periodo durante el que el
par transmitido sea ms alto que durante la operacin estable. El par
transmitido tambin puede elevarse cuando hay variaciones en la
velocidad o en la carga. La forma tradicional de tomar en cuenta
estas variaciones es mediante la aplicacin de factores de servicio,
que se multiplican por el par de trabajo para establecer el par de
seleccin (o par de diseo). Los fabricantes de elementos de
transmisin publican tablas con factores de servicio que toman en
cuenta el tipo de motor, el nmero de arranques por hora, el nmero
de horas que el equipo trabaja por da y las variaciones en el par
debidas al tipo de trabajo que hace la mquina.Comnmente el factor
de servicio de 1.0 es para mquinas impulsadas con motores
elctricos, con trabajo continuo de 8 horas al da, menos de 10
arranques por hora y sin variaciones importantes en la velocidad o
la carga.
Curva caracteristica para un motor de induccion tipo jaula de
ardilla.
Supongamos que para una determinada mquina y condiciones de
trabajo, el fabricante del componente a seleccionar recomienda un
factor de servicio FS. La capacidad de este componente deber ser
igual o mayor a FS por Ts para la velocidad de salida Ns . Debe
tenerse en cuenta que Ts y Ns se refieren a las condiciones en la
salida del elemento que se est seleccionando, ya que estas pueden
ser diferentes en otros puntos de la transmisin.
En algunas mquinas se debe aplicar un factor de servicio para
seleccionar el motor. Sin embargo, la mayora de los motores
elctricos tiene una curva caracterstica de operacin similar a la
que se muestra en la grfica, con un par mximo muy superior al par
nominal (par a plena carga), por lo que normalmente no es necesario
aplicar un factor de servicio para el motor. Adems, una vez que se
determina la potencia mnima requerida, se tiene que seleccionar un
motor estndar con potencia superior a sta. Si requerimos 4 kW (5.5
Hp), por ejemplo, tendremos que usar un motor de 5.5 kW (7.5
Hp).
Para la seleccin de los elementos mecnicos se puede multiplicar
el factor de servicio por la potencia requerida a la salida del
elemento a seleccionar, sin embargo, un criterio ms conservador
pide que se aplique el factor de servicio a la potencia del motor.
Hay dos razones para esto, la primera es que en cada arranque el
equipo mecnico estar sometido al par mximo del motor y no al par
demandado por la mquina, y la segunda es que pueden darse
condiciones en la operacin, no previstas en el diseo, que obliguen
al motor (y a la transmisin) a trabajar a plena carga.
No debemos confundir los factores de servicio con los factores
de seguridad. Con los primeros se busca una vida til adecuada para
los componentes, mientras que con los ltimos se toma en cuenta la
incertidumbre y la necesidad de proteger la integridad de las
personas y el equipo. En ocasiones en necesario aplicar ambos tipos
de factores simultneamente.
Como hemos visto, en algunos componentes mecnicos hay un
incremento en la temperatura hasta alcanzar un equilibrio entre el
calor que el componente absorbe y el que se disipa.
Por ello, al seleccionar esos componentes, es necesario tomar en
cuenta la capacidad trmica.
Los fabricantes de elementos mecnicos publican informacin con la
capacidad trmica para condiciones de ambientes normales. Si las
condiciones particulares de trabajo de la mquina no estn dentro de
los supuestos de la informacin publicada, es posible pedir al
departamento de ingeniera del fabricante para que la
proporcione.
EJEMPLO:
Deseamos seleccionar un motor elctrico de cuatro polos a 60 Hz
(1750 rpm) y un reductor tipo corona-sinfn para un transportador
con movimiento intermitente. El par de trabajo en el eje de mando
del transportador es de 400 Nm y la velocidad 35 rpm. La mquina
trabajar 16 horas por da, con 15 arranques por hora.
A.- El reductor tendr una relacin de velocidad de:
B.- La eficiencia de un reductor de este tipo es de 70%
aproximadamente.
C.- La potencia requerida en el motor
D.- El motor estndar de potencia superior es de 2.2 kW (3Hp)
E.- El factor de servicio recomendado para este reductor en
estas condiciones de trabajo es: 1.75
F.- El reductor deber tener una capacidad mecnica superior a
G.- El reductor deber tener una capacidad trmica superior a 2.09
kW
Finalizamos haciendo notar que cuando se trata de mquinas que
trabajan a velocidad variable, especialmente las accionadas por
servomotores, la seleccin no se hace en base a factores de
servicio, sino mediante clculos basados en el ciclo de trabajo.
Este es un tema muy amplio que trataremos en artculos futuros.
MASA
El primer paso en la seleccin de un motor y sus elementos de
transmisin, es determinar las fuerzas, pares de torsion y
velocidades, tanto lineales como angulares, que requiere el trabajo
a realizar. Cuando se trata de movimiento lineal las fuerzas
requeridas generalmente caen en alguna de las siguientes
categoras:
Fuerzas requeridas para acelerar o frenar una masa: F=ma
Fuerzas requeridas para contrarrestar la accin de la gravedad,
Peso P=mg
Fuerza de friccin igual al coeficiente de friccin [], por la
fuerza de contacto [C]. F= C (ver Figura No. 1).
Figura No. 1
NOTA: La fuerza de friccin acta siempre en sentido contrario al
movimiento y es igual al coeficiente de friccin [], multiplicado
por la fuerza de contacto entre las superficies en deslizamiento
[C]. En este caso la fuerza de friccin ser F=mg (cos ).
Cargas de proceso, estas son las fuerzas necesarias para hacer
un trabajo determinado, como cortar, doblar o laminar metales;
bombear o comprimir fluidos, etc.
Para movimiento giratorio, en lugar de la masa, usamos el
momento de inercia [].
Par requerido para acelerar o frenar una masa que gira: Par
requerido para contrarrestar la accin de la gravedad. T=rP= rmg
(ver figura No. 2).
Figura No. 2
NOTA: El par requerido para contrarrestar la fuerza de gravedad
es T= rmg
Par de arrastre (ver figura No. 3).
Figura No. 3
NOTA: C1 y C2 son las cargas que actan sobre los respectivos
cojinetes (fuerza de contacto). El par de arrastre para cada
cojinete ser .
Par provocado por las cargas del proceso.
Al estimar las fuerzas y pares requeridos para hacer un trabajo,
especialmente durante los periodos de aceleracin y frenado, es
necesario tomar en cuenta las masas y momentos de inercia de los
componentes de la mquina que estarn en movimiento, incluyendo los
elementos de transmisin y el mismo motor, ya que despreciarlos
puede resultar en un diseo deficiente. Tambin es necesario
considerar las condiciones reales de trabajo de la mquina, como
cargas pico, vibraciones, efectos del medio ambiente y el trato que
le dan quienes la operan.
Por ejemplo, para trabajos similares, sern muy diferentes las
especificaciones de una mquina para un laboratorio de precisin que
para una mina.
a:
aceleracin (lineal)
:
aceleracin angular
C:
Fuerza de contacto entre dos superficies que se deslizan entre
s
F:
fuerza
g:
aceleracin de la gravedad (9.81 o 32.2 sobre la superficie de la
tierra)
:
ngulo de inclinacin a partir de la horizontal
momento de inercia
m:
masa
:
coeficiente de friccin
P:
Peso
r:
radio o brazo de palanca
T:
par
Ing. Eduardo Nio de Rivera
COMPONENTES MECANICOSREDUCTORES DE VELOCIDAD - I
INTRODUCCION:
Este capitulo trata sobre la seleccin de reductores de velocidad
de relacin fija para uso industrial. Los de relacin variable, los
diferenciales, y los que usan cadenas y catarinas o poleas y
bandas, se vern en otros captulos.
Ante los avances en tecnologa para motores de velocidad
variable, especialmente los servomotores y motores a pasos, el
diseador debe contemplar la posibilidad de eliminar el reductor
usando una transmisin directa entre el motor y la mquina. Esta
solucin es costeable si el motor puede operar eficiente y
adecuadamente a la velocidad requerida. No debe perderse de vista,
sin embargo, que la potencia nominal de los motores de velocidad
variable se establece para una velocidad base, y que por debajo de
sta la potencia del motor est limitada por el par nominal y por la
capacidad trmica del motor. Cuando se trabaja con servomotores y
motores a pasos es tambin importante tomar en cuenta la relacin
entre el momento de inercia del motor y el de la mquina, ya que si
esta relacin pasa ciertos limites para el motor en cuestin, se hace
necesario el uso de un reductor de velocidad para poder controlarlo
adecuadamente.
TIPOS DE REDUCTORES
Al seleccionar un reductor se deben tomar en cuenta, adems de la
capacidad y la velocidad requeridas, los costos, la eficiencia, el
rgimen y las condiciones de trabajo, el espacio disponible, la
disponibilidad de refacciones, la confiabilidad y la precisin. Para
cubrir estas necesidades hay en el mercado varios tipos de
reductores de velocidad, cada uno de ellos con una combinacin de
atributos que lo hacer ms o menos deseable para un trabajo en
particular. A continuacin se presentan las caractersticas
principales de algunos.
Engranes Cilndricos
Los engranes cilndricos permiten transmisin entre dos ejes
paralelos, sin embargo, al usar ms de un paso, se pueden realinear
los ejes para que el eje de salida sea colineal con el de entrada.
Los engranes de dientes rectos son quiz los ms comunes y baratos.
Tienen buena eficiencia, 95% o ms, y alta capacidad. Su principal
limitacin es que tienden a producir ruido y vibraciones. Mediante
el uso de engranes de dientes helicoidales se puede incrementar la
capacidad y la eficiencia (97 a 99% por paso).
Los dientes helicoidales producen menos ruido y vibraciones que
los rectos, pero requieren de mejor lubricacin, y rodamientos que
soporten las cargas axiales que generan. Es posible tener engranes
cilndricos helicoidales con ejes cruzados, aunque son poco usuales
en el mercado, hay, por ejemplo, reductores con engranes de este
tipo en relacin 1:1 y ejes huecos perpendiculares. Por cuestiones
prcticas, en los reductores estndar se limita la relacin de
reduccin a 7:1 por paso, aproximadamente. Sin embargo hay
reductores de fabricacin especial y mquinas con engranes expuestos
que tienen relaciones mucho mayores. Para contrarrestar las cargas
axiales generadas por los engranes de dientes helicoidales, se
pueden emplear engranes de doble hlice, que tienen mayor costo y
requieren de mayor precisin en los soportes.
Conjunto de engranes de doble hlice Cortesa de Flender
Conjunto de Engranes Cilindricos HelicoidalesCortesa de
Flender
Engranes Cnicos
Los engranes cnicos permiten que los ejes trabajen en ngulo,
casi siempre de 90. Los dientes pueden ser rectos o en espiral. Al
igual que con los engranes cilndricos, los de dientes rectos
provocan ms ruido y vibraciones. Los de dientes en espiral, por su
parte, requieren mayor precisin en la alineacin y permiten menos
juego interno en los rodamientos. Los engranes cnicos a menudo son
empleados en relacin 1:1 para crear derivaciones en la transmisin,
que permiten sincronizar diversas partes de una mquina. La relacin
mxima en reductores estndar es tambin de 7:1 aproximadamente en un
juego de engranes cnicos. Para ampliar la gama de relaciones de
velocidad se puede combinar un paso cnico con uno o ms pasos
cilndricos.
Caja con engranes cnicos con dientes en espiralCortesa de
FlenderCorona - Sinfn
En los reductores tipo corona-sinfn, los ejes son
perpendiculares, pero no estn sobre el mismo plano, lo que permite
mayor espacio para los soportes tanto del sinfn como de la corona.
Este tipo de engranes permite relaciones muy elevadas, hasta 100:1
en un solo paso, ocupando un espacio pequeo. Su desventaja
principal es su baja eficiencia. Hay reductores de dos o ms pasos
de corona-sinfn o un paso corona-sinfn con uno o ms pasos de
engranes cilndricos.
Dependiendo de la geometra interna y de los materiales, un
sistema de corona y sinfn puede o no trabajar en sentido invertido,
es decir, con el eje de baja velocidad como lado motriz. Aunque
esto es diferente para cada fabricante y diseo, podemos decir que
en la mayora de los casos los reductores con relacin menor a 15:1 o
20:1, aproximadamente, pueden trabajar en sentido invertido (con
una eficiencia sumamente baja) y los de relacin mayor son
autobloqueados, es decir, tienden a amarrarse si en estado esttico
se aplica un par en el eje de baja velocidad. Aunque un reductor
sea autobloqueado, no es recomendable usarlo como freno para
sostener una carga, ya que vibraciones o golpes pueden permitir el
movimiento de la carga. Tampoco de recomienda realizar un frenado
dinmico desde el eje de alta velocidad de reductores
autobloqueados, ya que esta prctica puede causar daos en los
engranes.
Reductor tipo corona-sin fn con brida (o campana) para
servomotor y cople tipo fuelle de alta rigidez torsional. Cortesa
de SIPCO
Dada su baja eficiencia y su tamao relativamente pequeo, en
algunas condiciones de trabajo los reductores tipo corona-sinfn
requieren de lubricantes especiales o de sistemas de enfriamiento,
como ventiladores o intercambiadores de calor.
Existen varios diseos para este tipo de engrane. El estndar
tiene un sinfn cilndrico y contacto tanto en el acercamiento de la
corona al sinfn, como en la parte recesiva del movimiento. En los
engranes de accin recesiva el contacto solo ocurre en la etapa
recesiva, lo que permite mayor capacidad y eficiencia. El sistema
de sinfn con dientes de perfil cncavo ofrece tambin ventajas en
cuanto a capacidad y eficiencia. Y el diseo de doble envolvente, en
que el sinfn sigue la forma de la corona, permite un mayor nmero de
dientes en contacto para incrementar la capacidad y la eficiencia.
Hay tambin sistemas que reducen el juego interno en los engranes,
algunos de los cuales alcanzan a eliminarlo totalmente. Desde
luego, el costo se incrementa en la medida que se hace ms
sofisticado el diseo.
Engranes Hipoidales
Estos engranes son una variante del engrane cnico en que los
ejes quedan en ngulo pero sin cruzarse. Este sistema ha tenido ms
aplicacin automotriz y se ve poco en reductores estndar
industriales. El engrane hipoidal ofrece mayor capacidad que el
engrane cnico con eficiencia poco menor a la de ste.
Engranes de dientes laterales
Hay diversas versiones de este tipo de engrane. Una de ellas
utiliza un pin cilndrico de dientes rectos con una corona de
dientes laterales. Este arreglo es similar a los engranes cnicos,
pero permite el desplazamiento lineal del pin sobre su eje, con lo
que se obtienen ventajas para ciertas aplicaciones. Otra versin usa
un sinfn con una corona de dientes laterales, en forma similar a
los engranes hipoidales, permitiendo mayor capacidad que stos y
mayor eficiencia que los de corona-sinfn estndar.
Sistemas Cicloides
Mediante el uso de componentes excntricos (cigeales) y un
sistema de pernos, rodamientos, ruedas dentadas y rodillos se
logran relaciones de velocidad mayores a 100:1 en un solo paso. En
condiciones ideales de trabajo la eficiencia llega a 95% pero puede
bajar rpidamente si la carga es menor al 90% de la capacidad del
reductor. Hay reductores de dos o tres pasos cicloidales,
alcanzando relaciones del orden de 500,000:1. Estos reductores
tienen una alta capacidad para soportar cargas pico.
Transmisin cicloidal Cortesa de Harmonic Drive Technologies,
Teijin Seiki Boston, Inc.
Por sus dimensiones reducidas, en algunas condiciones de trabajo
la capacidad natural de disipar calor puede ser insuficiente,
haciendo necesarios ventiladores u otros sistemas de enfriamiento.
En forma y con consecuencias similares a los reductores tipo
corona-sinfn, dependiendo se la geometra interna pueden trabajar
sentido invertido o ser autobloqueados. Por su bajo momento de
inercia, algunos reductores estn diseados para altas velocidades y
precisin, con adaptadores para servomotores, juego interno nulo y
alta rigidez torsional.
Este reductor tiene un eje hueco a la entrada, un primer paso de
engranes cilndricos rectos y un segundo paso cicloidal. La salida
es a travs del plato frontal. Cortesa de Harmonic Drive
Technologies, Teijin Seiki Boston, Inc.
Ing. Eduardo Nio de Rivera
COMPONENTES MECANICOSREDUCTORES DE VELOCIDAD - II
Sistemas de Engranes Planetarios
Estos sistemas tienen un pin central, un conjunto, que
generalmente es de tres engranes que giran alrededor del pin,
llamados satlites, y una corona con dientes internos. Los dientes
de los engranes pueden ser rectos o helicoidales. El sistema
planetario ofrece una capacidad elevada en una envoltura pequea
porque la carga se comparte entre los tres satlites. Alcanzan
relaciones de 10:1 por paso y los ejes son colineales. Trabajan en
sentido invertido, como multiplicadores de velocidad, con
eficiencia similar al sentido de reduccin. Pueden combinarse con un
paso preliminar de engranes cnicos, engranes de dientes laterales o
corona-sinfn para tener ejes perpendiculares. Sus caractersticas
los hacen atractivos para transmitir cargas elevadas en espacios
reducidos. Para usos de alta precisin y velocidad se fabrican con
juego interno reducido (menor a 3 minutos de arco) y con
adaptadores para acoplarse directamente a servomotores.
Juego de engranes planetarios con dientes rectosCortesa de
Flender
Engranes Harmnicos
Estos sistemas tienen en el centro una leva elptica, alrededor
de la cual est colocado un engrane circular. La pared del engrane
es delgada por lo que ste toma la forma de la leva. En la parte
exterior hay una corona circular con dientes internos. La corona
tiene dos dientes ms que el engrane. El contacto entre el engrane y
la corona ocurre en los extremos del eje mayor de la leva elptica.
Haciendo girar la leva una revolucin completa respecto a la corona,
el engrane girar en sentido contrario el equivalente a dos dientes.
De manera que la relacin de velocidades es igual a la mitad del
nmero de dientes del engrane, haciendo posibles relaciones del
orden de 300:1 en un solo paso. La eficiencia de estos reductores
vara con la velocidad, la carga y la lubricacin. Para condiciones
normales de trabajo es de entre 80 y 90%. Estos reductores pueden
trabajar en sentido invertido y a altas velocidades. El juego
interno en estos engranes es nulo, pero puede haber juego entre los
ejes de entrada y salida provocado por otros componentes del
reductor. La combinacin de tamao, momento de inercia y precisin los
hacen atractivos en robtica y aplicaciones similares.
Funcionamiento de los engranes harmnicos.Cortesa de Harmonic
Drive Technologies, Teijin Seiki Boston, Inc.
SELECCION
Es comn que la seleccin del motor y su transmisin se deje para
el final del diseo, una vez que todo lo dems est definido. Para
algunas mquinas sta puede resultar una forma prctica de disear,
pero en otras puede llevar a un diseo inadecuado, especialmente si
se tienen restricciones en espacio, velocidad, aceleracin,
precisin, eficiencia, etc. Es preferible, entonces, que el proceso
de seleccin de los componentes de transmisin se haga simultneo con
el desarrollo del resto de la mquina.
En la actualidad los fabricantes ofrecen muchas opciones en
cuanto a materiales, arreglos de ejes, sistemas de soporte, sellos
y retenes, lubricantes especiales, y diseos para condiciones
severas de trabajo. Al seleccionar un reductor conviene tener en
cuenta estas opciones ya que pueden ofrecer ahorros importantes o
representar la diferencia entre una seleccin adecuada y una
deficiente.
Reductor planetario con opciones:Brida para acoplamiento directo
del motor;Brida de montaje con superficies piloto maquinadas para
soportes;Carcasa con alojamiento especial para rodamientos del eje
de salida; ypin cilndrico de dientes rectos en el eje de salida
.Cortesa de SIPCO.
La relacin de velocidades, i, requerida, ser igual a la
velocidad de entrada, Ne (rpm), dividida por la velocidad de
salida, Ns (rpm). Por ejemplo, si la velocidad del motor es de 1750
rpm. y la deseada a la salida del reductor es 50 rpm.:
La potencia requerida a la entrada del reductor ser:
en donde:
Pe:
potencia requerida a la entrada
Ts:
par requerido a la salida
Ns:
velocidad a la salida en rpm
:
eficiencia
K:
constante de conversin=
9,550 para par en Nm y potencia en kW
63,025 para par en lb-in y potencia en Hp
5,252 para par en lb-ft y potencia en Hp
La carga radial sobre un eje, carga en voladizo, provocada por
un elemento de transmisin, como una polea o catarina, tiene un
impacto importante sobre la vida til de los rodamientos que
soportan el eje. Adems, cada reductor tiene limitaciones
estructurales respecto a la magnitud, el punto de aplicacin y la
direccin de esta carga. Aunque existen formas ms precisas de
determinarla, esta carga se puede estimar mediante la siguiente
formula:
Lr: carga radial sobre el ejeTt: par que transmite el elemento
mecnicorp: radio de paso del elementofr: factor de carga radial,
conforme al cuadro No. 1.
Cuadro No. 1
Factor de carga fr
Catarina
1.00
Polea dentada
1.00
Engrane
1.25
Polea Banda V
1.50
Polea para Banda Plana
2.50
Para determinar las capacidades mecnica, trmica y para soportar
cargas radiales y axiales sobre los ejes, requeridas en el
reductor, se debe tomar en cuenta la potencia a la entrada, los
componentes de transmisin montados sobre los ejes de entrada y
salida, si se espera que el reductor soporte cargas generadas por
la mquina, el rgimen y condiciones de trabajo, y el medio ambiente
(para una discusin ms detallada, ver los captulos respectivos
publicados en este foro). En los clculos correspondientes es
preferible seguir las recomendaciones del fabricante del equipo que
se est seleccionando, ya que, aunque muchos siguen los estndares
AGMA o ISO, algunos fabricantes usan definiciones para la capacidad
y/o criterios para establecer los factores de servicio diferentes a
los establecidos en dichos estndares. Y en ltima instancia, cada
fabricante conoce mejor su equipo, y ofrece garantas de acuerdo a
sus propios criterios de seleccin.
POLEAS Y BANDAS I
El sistema de poleas y banda es una forma simple, barata y
efectiva de transmitir movimiento entre dos ejes. Normalmente los
ejes son paralelos y giran en el mismo sentido, pero es posible,
mediante el uso de bandas planas, hacerlos girar en sentidos
opuestos y con ciertas restricciones, tambin es posible transmitir
entre ejes colocados a 90.
Este sistema ofrece flexibilidad en la distancia entre los
centros de los ejes, su montaje no exige una alineacin tan precisa
como otros sistemas, no requiere lubricacin, requiere poco
mantenimiento y la elasticidad de la banda amortigua cargas pico y
vibraciones torcionales. Se pueden emplear bandas con superficie de
contacto lisa (planas o de seccin trapezoidal) que no generan ruido
ni vibraciones o poleas y bandas dentadas para evitar el
deslizamiento y mantener la sincronizacin entre los ejes.
La eficiencia de una transmisin por poleas y banda es alta, las
principales prdidas son producto del arrastre o "creep", condicin
inevitable, provocada por las deformaciones que la banda sufre al
tomar la forma de la polea. Cuando la banda trabaja adecuadamente
hay arrastre sin deslizamiento, y la temperatura se eleva muy poco
(la temperatura de una banda detenida es soportable al tacto), pero
si adems del arrastre hay deslizamiento, la temperatura se eleva
mucho ms, con posibles daos a las poleas y las bandas.
En la prctica la relacin de reduccin de velocidades en un
sistema de poleas y banda se limita a 10:1 por paso,
aproximadamente. Es posible lograr relaciones mayores, pero esto
puede requerir poleas muy grandes o mucha separacin entre los ejes,
por lo que, generalmente, es preferible usar ms de un paso de
reduccin, en el primer paso se usan poleas, y los sucesivos pueden
ser con poleas, engranes o cadenas .
Gracias a avances en las tecnologas de fabricacin y al empleo de
nuevos materiales, la capacidad de transmisin de las bandas se ha
venido incrementando continuamente durante los ultimos aos. Este
incremento en capacidad hace posible reducir el nmero de bandas al
sustituir las de una transmisin que se haya diseado tiempo
atrs.
TIPOS DE BANDAS
Las bandas pueden ser de construccin continua, tambin llamada
sinfn, o abiertas, en las que la unin de los extremos se hace
durante el montaje. Este ltimo sistema se emplea cuando el
reemplazo de una banda sinfn es problemtico y tardado.La
clasificacin ms comn se basa en la forma de la seccin de la banda.
La banda plana tiene una seccin rectangular y el contacto con la
polea se da en la superficie interior de la banda. En la banda
trapezoidal tipo V, el contacto es en las paredes cnicas de la
banda. En la banda de seccin redonda tipo O, el contacto en en el
semicrculo interior de la seccin de la banda. Y en las poleas y
bandas dentadas, el contacto es entre los dientes de ambos
elementos.
BANDA PLANA
Este tipo de banda tuvo un amplio uso en fbricas en que la
potencia motriz vena de un motor general y se tenan ejes comunes de
los que se tomaba fuerza para todas las mquinas de la planta.
Comparada con diseos ms modernos, la banda plana requiere de una
tensin elevada para transmitir un par determinado. Esta condicin
hace necesarios el uso de ejes y soportes ms robustos. Por otra
parte, resulta relativamente fcil reducir la tensin en la banda
para permitir que deslice en el arranque o ante cargas elevadas, lo
que puede hacerla atracticva para algunas mquinas.
BANDA TRAPEZOIDAL
Desde su aparicin y con el uso generalizado de motores elctricos
individuales para cada mquina, las bandas trapezoidales han ido
desplazando a las bandas planas. Hoy en da las bandas trapezoidales
son las ms usadas en vehculos, aparatos de lnea blanca,
ventiladores y mquinas industriales. El ngulo de las paredes de la
banda tiene un efecto multiplicador sobre la fuerza de contacto
entre las superficies de friccin, permitinedo transmisiones ms
pequeas y menor tensin en la banda.En el estndar de los Estados
Unidos, el diseo tradicional comprende las secciones designadas con
las letras A, B, C, D y E. De diseo ms reciente son las bandas tipo
L para trabajo ligero y las secciones de diseo V que han
reemplazado a las secciones tradicionales porque permiten
transmisiones ms pequeas para requerimientos similares. La
siguiente tabla nos muestra las dimensiones principales para las
diferentes secciones estandar de banda que existen:
SECCINLH3L
3/8
7/32
4L
1/2
5/16
5L
21/32
3/8
3V
3/8
5/16
5V
5/8
17/32
8V
1
29/32
A
1/2
5/16
B
21/32
13/32
C
7/8
17/32
D
1 1/4
3/4
E
1 1/2
29/32
Banda Trapezoidal Estandar
Banda Trapezoidal Tipo V
Banda Trapezoidal Tipo L
Tanto las bandas tradicionales como las de diseo V se fabrican
en conjuntos unidos de 2 a 5 bandas, llamados bandas mltiples, con
los que se evita la necesidad de igualar bandas para trabajar en
poleas de varias ranuras y dando estabilidad a la transmisin. Ver
figura No. 1
Figura No. 1
Otra variante son las bandas trapezoidales dentadas, que,
teniendo la misma seccin de las bandas estndar, son ms flexibles y
permiten el uso de poleas de menor dimetro. Estas bandas comnmente
se designan con una X despus del nmero bsico, 3VX, por ejemplo. A
diferencia de las bandas lisas, las bandas dentadas comnmente
tienen los cantos en bruto, es decir, que no estan recubiertos, lo
que permite una mayor capacidad de transmisin.
Banda Trapezoidal Dentada
BANDA Y POLEAS DENTADAS
Las poleas dentadas no dependen de la friccin para transmitir
potencia, permitiendo una tensin mnima en las bandas. Adems, al no
haber deslizamiento entre la polea y la banda, hay sincronizacin
entre los ejes. Entre los avances tecnolgicos destaca la
modificacin de los perfiles de los dientes de las poleas y sus
bandas para ofrecer transmisiones cada vez ms silenciosas y
durables. Ver figura No. 2
Figura No. 2
Algunas bandas con dientes modificados pueden trabajar con
poleas de perfil estndar, pero otras requieren de poleas con
dientes compatibles. Un diseo reciente incorpora dientes de doble
hlice desfasada, que ofrece una transmisin ms sileciosa, con menos
vibraciones y mayor eficiencia.
Las poleas con dientes rectos pueden tener paso en pulgadas,
series MXL (1/12"), XL (1/5"), L (3/8"), H (1/2"), XH (7/8") y
XXH(1-1/4"), o las series 3M, 5M, 8M, 14M y 20M , donde los dgitos
representan el paso en milmetros. Debido a que algunas poleas y
bandas se fabrican con geometra diferente a la estndar, al
reemplazar las bandas es importante verificar que las bandas nuevas
sean compatibles con las poleas instaladas.
Al especificar la banda deseada se debe indicar el diseo, HPR,
por ejemplo, el nmero de dientes, digamos 1778, el paso, 14 mm, y
el ancho, 55 mm. El modelo ser HPR 1778-14M-55.
POLEAS Y BANDAS II
BANDA HEXAGONAL Y DE ESLABONES
Se fabrican tambin bandas hexagonales para transmitir por ambos
lados ( figura No. 3 ) y bandas de eslabones, con capacidad menor a
las bandas continuas, pero que permiten reemplazarlas o ajustar la
tensin, sin necesidad mover los ejes (figura No. 4).
Figura No. 3
Figura No. 4
BANDAS REDONDAS TIPO O
Las bandas redondas se utilizan en transmisiones de poca
potencia, como maquinas de oficina y enseres domsticos. Debido a la
simetra de una seccin redonda, es muy sencillo trabajar con ejes
mltiples u oblicuos, por lo que pueden ser tiles en aparatos con
transmisiones complicadas.BANDA DENTADA DUAL
La mayora de los fabricantes ofrecen tambin bandas con dientes
en la superficie interior y en la exterior, que permiten transmitir
movimientos por ambos lados de la banda, tal y como se muestra en
la figura No. 5
Figura No. 5
OTROS TIPOS
Adems de los tipos de bandas que se han mencionado, hay una
variedad de diseos para resolver problemas especficos,
especialmente para transmisiones pequeas. A travs de variaciones en
materiales, geometra o construccin, se obtienen bandas ms
flexibles, que permiten desalineacin y el uso de poleas de menor
dimetro, reduciendo peso, momento de inercia y espacio de una
transmisin.
SELECCION
Los clculos para la seleccin de una banda pueden ser algo
complejos. Afortunadamente, muchos fabricantes ofrecen programas de
computadora e incluyen en sus catlogos y pginas electrnicas formas
simplificadas, que nos llevan de la mano paso a paso, usando
sencillas frmulas, grficas y tablas de datos, para hacer una
seleccin adecuada.
Estos procedimientos son aceptables para la mayora de las
mquinas, pero hay transmisiones que por las velocidades, cargas o
condiciones de trabajo, requieren de un anlisis ms detallado. En
estos casos es recomendable consultar al fabricante.
A grandes rasgos se siguen los siguientes pasos:
La informacin que se requiere para seleccionar una transmisin
es:
La potencia y el tipo de motor (motor elctrico de 5 Hp, por
ejemplo)
Dimetro de los ejes de la polea motriz (1.125" ) y de la polea
conducida (1.750" )
El tipo de mquina y el rgimen de trabajo (transportador de banda
a granel, trabajo continuo 10 hrs diarias)
La distancia aproximada entre los centros de los ejes (13")
La velocidad de la polea motriz (1750 rpm) y de la polea
conducida (400 rpm aproximadamente)
Colocacin de la polea loca o tensora, si se va a emplear (sin
polea loca)
El primer paso es escoger el factor de servicio en el cuadro
adecuado, tomando en cuenta tipo de motor, tipo de mquina, rgimen
de trabajo y la colocacin de la polea loca, si es que se emplea. La
potencia de diseo es igual al factor de servicio por la potencia
del motor. Factor de servicio recomendado: 1.2, la potencia de
diseo ser 1.2 x 5 = 6 Hp
En seguida, utilizando una grfica, se selecciona la seccin
adecuada para la combinacin de potencia de diseo y velocidad. 3V o
3VX para transmitir 6 Hp a 1750 rpm.
Luego, en una tabla se verifica dimetro mnimo de polea
recomendado para el motor que se va a emplear (entre menor sea el
dimetro de una polea, mayor ser la carga en voladizo sobre al eje
del motor). Para un motor elctrico estndar de 5 Hp a 1750 rpm se
recomienda que el dimetro de la polea motriz sea mayor o igual a
3.0"
Potencia del Motor Electrico[rpm]
1/2
3/4
1
1 1.5
2
3
5
7.5
10
15
20
25
30
40
50
870
2.2
2.4
2.4
2.4
3.0
3.0
3.8
4.4
4.4
5.2
6.0
6.8
6.8
8.2
8.4
1160
-
2.2
2.4
2.4
2.4
3.0
3.0
3.8
4.4
4.4
5.2
6.0
6.8
6.8
8.2
1750
-
-
2.2
2.4
2.4
2.4
3.0
3.0
3.8
4.4
4.4
4.4
5.2
6.0
6.8
3500
-
-
-
2.2
2.4
2.4
2.4
3.0
3.0
3.8
4.4
4.4
-
-
-
Diametro minimo recomendado para poleas montadas en motores
La relacin de reduccin es igual a la velocidad de la polea
motriz entre la velocidad de la polea conducida (1750 / 400 =
4.375). En las tablas de seleccin que proporciona el fabricante,
correspondiente a la seccin de banda determinada en el segundo paso
(banda 3V), se escoge una combinacin de poleas que ofrezca la
relacin deseada y que tenga un dimetro mayor al minino recomendado.
Para el caso del ejemplo, se obtiene una seleccin con las
siguientes caracteristicas: relacin 4.23:1, polea motriz 3.35",
polea conducida 14".
Esta tabla indica la capacidad, en Hp por banda, para la
velocidad de la polea motriz, 3.66 Hp en este ejemplo. Esta
capacidad debe multiplicarse por un factor de ajuste para la
distancia entre centros deseada, que aparece en la misma tabla.
Para la banda 3VX560, la distancia entre centros es 13.3" y el
factor de ajuste es 0.90, por lo que la capacidad: 0.87 x 3.35 =
2.91 Hp por banda.
RelacionPoleas de Inventario Diametro Ext.Potencia Por
BandaFactor De AjusteDistancia Entre CentrosMotriz
Conducida
1750 [rpm]
[pulg]
.....
.....
.....
.....
.....
..........
.....
.....
.....
.....
.....
..........
4.23
3.35
14.00
3.66
0.87
3V560 13.3
.....
.....
.....
.....
.....
..........
.....
.....
.....
.....
.....
..........
Tabla de Potencia por Banda y Factor de Ajuste
Finalmente, se divide la potencia de diseo entre la capacidad
por banda, ajustada a la distancia entre centros, para obtener el
nmero de bandas requeridas en la transmisin. 6 / 2.91 = 2.06. Un
diseo conservador nos llevara a usar 3 bandas, otras opciones
seran: usar dos bandas, sacrificando un poco el factor de servicio;
o, incrementar la distancia entre centros de los ejes.
TENSION DE LAS BANDAS
Las bandas que trabajan en friccin requieren de la tensin
correcta para transmitir el par deseado. Como se ha dicho
anteriormente, si la tensin es baja habr deslizamiento entre la
polea y la banda.
Hemos dicho tambin que esta condicin puede ser deseable, pero
tambin debe decirse que representa prdida de eficiencia y
disminucin en la vida til de la transmisin. En la actualidad la
amplia disponibilidad y economa de bandas trapezoidales, que no se
adaptan muy bien a un deslizamiento prolongado, hace preferible
utilizar en conjunto con la transmisin de este tipo de poleas,
otros elementos, como inversores de frecuencia, embragues y coples
hidrulicos, diseados especficamente para permitir arranques suaves
y para proteger la mquina y su transmisin contra los efectos de
cargas elevadas. Tampoco es conveniente permitir demasiada tensin
en la banda porque sto puede provocar dao prematuro en ejes,
rodamientos o en la misma banda.
La forma ms sencilla de encontrar la tensin adecuada de una
banda consiste en separar los ejes hasta que la banda alcance una
tensin que permita poco arco en los tramos libres de la banda. Se
hace trabajar el equipo, observando la transmisin para detectar un
chillido que indique deslizamiento en el arranque o durante
periodos de carga elevada, o movimiento excesivo en el lado suelto
de la banda. Si por falta de experiencia o porque la mquina lo
requiere este mtodo no es aceptable, se puede lograr un ajuste ms
exacto mediante la medicin de la fuerza requerida para deformar la
banda una distancia determinada, como se indica en la figura No.
6.
Figura No. 6
Debido a la elongacin de las banda y el asentamiento entre
poleas y bandas, es conveniente ajustar la tensin de bandas nuevas
poco arriba del mximo recomendado para operacin normal, y ser
necesario verificar la tensin despus de las primeras 24 horas de
trabajo.
Ing. Eduardo Nio de Rivera
CADENAS Y RUEDAS DENTADASPARA TRANSMISIN I
INTRODUCCION
Desde nios hemos visto las cadenas como simples partes de una
bicicleta. Las hemos observado, maltratado y cambiado sin prestar
ms atencin a su funcionamiento o construccin. Sin embargo, la
cadena es un componente bastante complejo tanto por la forma en que
trabaja, como por los materiales y procesos de fabricacin que
requiere. Afortunadamente, al igual que en el caso de las poleas y
bandas, los fabricantes de cadena publican formas impresas o
programas de computadora que nos permiten seguir pasos sencillos
para hacer una seleccin correcta en las aplicaciones ms
comunes.
La cadena permite transmitir movimiento entre ejes paralelos. El
arreglo ms sencillo tiene un eje motriz y uno conducido girando en
el mismo sentido, pero pueden hacerse arreglos con ms ejes o hacer
que giren en sentidos opuestos. Algunas de las ventajas que ofrece
son:
La rigidez de la cadena y la rueda dentada mantienen la sincrona
entre dos o ms ejes.
Alta eficiencia, superior a 98% por etapa de reduccin en cadena
de rodillos
Su construccin y materiales permiten una alta capacidad de carga
y larga duracin.
La cadena no necesita estar en precarga para transmitir un
par.
Debido a que los extremos se unen con un candado, es fcil de
instalar o reemplazar sin mover los ejes.
Se puede adaptar a ambientes hostiles (temperaturas altas o
bajas, humedad, presencia de aceite, etc.)
Se adapta fcilmente a instalaciones expuestas o cubiertas.
Permite arreglos con varios ejes conducidos a partir de un solo
eje motriz.
Hay flexibilidad para establecer la distancia entre los centros
de los ejes.
La elasticidad de los componentes y la presencia de lubricante
amortiguan los impactos.
Se pueden colocar aditamentos a la cadena para usarla en equipo
de manejo de materiales.
Algunas de sus limitaciones son:
Mayor nivel de ruido que la transmisin por poleas y bandas.
La cadenas estndar solo pueden transmitir en un plano.
Su velocidad mxima de operacin es un tanto limitada.
La lubricacin puede ser complicada
Cuando se reemplaza una cadena, es probable que sea necesario
reemplazar tambin las ruedas dentadas.
DESEMPEO
En operacin, una cadena es sometida a tensin en las placas
laterales, esfuerzos de corte en los pernos y deslizamiento entre
rodillos, bujes y pernos. La tensin es cclica y tiene efectos en la
cadena que dependen de la intensidad: el limite absoluto es la
carga de ruptura; aproximadamente a un 65% de esta carga, para la
mayora de los materiales usados en cadenas de acero, se inicia el
dao por deformacin permanente; por debajo de este nivel, la cadena
est sujeta a fatiga, entre menor sea la carga mayor ser el nmero de
ciclos de tensin y relajamiento que pueden soportar los componentes
de la cadena; hay una carga, conocida como el limite de fatiga, por
debajo de la cual no hay deterioro por fatiga pero la cadena sufre
desgaste en las superficies de contacto entre el buje y el
perno.
Una cadena debe seleccionarse con limite de fatiga superior a
las cargas de trabajo. De esta manera la falla ser por desgaste,
evitando fallas catastrficas por fatiga, deformacin o fractura, que
pueden daar la mquina o causar lesiones. Adems, el desgaste hace
que la cadena se alargue, de manera que al medir la longitud total
de la cadena podemos conocer el grado de desgaste y prever con
tiempo la necesidad de reemplazarla. Los fabricantes de cadena
presentan la informacin de seleccin en grficas o cuadros, que toman
en cuenta el limite de fatiga en las placas laterales, un limite
similar para bujes y rodillos, y la velocidad que provocara la
prdida de la pelcula lubricante y, por ello, daos al perno por roce
directo con el buje.
Al entrar en contacto con la rueda dentada, los eslabones de una
cadena pasan de una alineacin ms o menos recta a una angular. Este
es un movimiento corto y rpido, que se inicia en una condicin
esttica, en la que hay contacto metal con metal entre las
superficies del perno y el buje, haciendo inevitable el desgaste e
imprescindible una buena lubricacin.
Otros factores que influyen en el desgaste son: a ms velocidad,
mayor ser el nmero de veces por unidad de tiempo que cada eslabn
entre en contacto con una de las ruedas dentadas y el desgaste se
dar con mayor rapidez; entre menos dientes tenga la rueda, ms
grande ser el ngulo que tendrn que girar los eslabones, y mayor ser
el desgaste; y, en una cadena ms larga, cada eslabn tardar ms
tiempo en volver a entrar a entrar en contacto con la rueda, de
manera que el desgaste ser menor.
Las bandas se acomodan alrededor de una polea redonda en forma
tal que el contacto entre la polea y la banda se inicia siempre la
misma lnea tangente a la polea. Las cadenas, por el contrario,
forman un polgono sobre la rueda dentada. Esta geometra hace que la
cadena tenga un movimiento lateral cclico y pulsaciones en la
velocidad. Entre menor sea el nmero de dientes en la rueda, mayor
ser el movimiento lateral y la variacin de velocidad en el
ciclo.
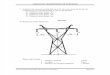
Desplazamiento lateral debido al efecto poligonal en una rueda
de cuatro dientes
Suponiendo una velocidad constante en la rueda motriz, la
variacin porcentual en la velocidad lineal de la cadena est dada
por la formula:
donde N es el nmero de dientes de esta rueda. En trminos
prcticos esto impone un lmite al nmero mnimo de dientes que puede
tener la rueda motriz para cada aplicacin. Como se muestra en la
siguiente grfica, este efecto es muy pronunciado para ruedas con
menos de 20 dientes, por lo que se debe tener cuidado cuando la
seleccin considera ruedas ms pequeas.
N
[Incremento] V%
9
6.031
11
4.051
13
2.906
15
2.185
17
1.703
19
1.364
21
1.117
23
0.931
25
0.789
27
0.676
29
0.586
31
0.513
Por otro lado, la elongacin de la cadena, producida por el
desgaste, hace que aumente el paso entre eslabones, con lo que
aumenta tambin el dimetro de paso, haciendo que los rodillos se
coloquen en un punto ms alto en los dientes. En el caso extremo la
cadena logra saltar fuera de los dientes. Este efecto es mayor
entre mayor sea el nmero de dientes. Otras desventajas de las
ruedas demasiado grandes son: costo, espacio, dificultad para
lubricar y fuerzas centrfugas elevadas. Estas consideracines
imponen un lmite prctico para la mayora de los usos industriales de
6:1 en la reduccin por paso en una transmisin de cadena.
Para transmisiones en que la distancia entre centros es
ajustable y el nmero de dientes de las ruedas est dentro de los
lmites indicados, una elongacin de un 2% es aceptable. Dependiendo
de la configuracin de la transmisin y de la velocidad de operacin,
en las transmisiones con mayor nmero de dientes o en las que no
tienen la posibilidad de ajustar la distancia entre centros, la
elongacin aceptable puede ser del orden del 0.7% al 1% . Hay
fabricantes que aceptan, para condiciones especficas, hasta un 3%
de elongacin, pero debemos tener en cuenta que comnmente el perno
es cementado y cuando el desgaste ha penetrado por debajo de la
capa endurecida, el deterioro sucesivo de la cadena ser
extremadamente rpido.
LUBRICACION
En una cadena el lubricante cumple varias funciones:
Lubrica las superficies de contacto entre pernos y bujes, y
entre rodillos y ruedas dentadas
Amortigua impactos
Elimina el calor generado durante la operacin
Elimina contaminantes
Evita la corrosin
El lubricante debe fluir con facilidad para penetrar a las zonas
en que se requiere. Por lo que debe evitarse lubricar con grasa.
Aunque es posible usarla para aplicaciones de baja velocidad y con
ciertas precauciones, en general, la grasa no penetra adecuadamente
en las zonas que requieren lubricacin, dejndolas desprotegidas y
provocando fallas prematuras.
El siguiente cuadro muestra el grado de aceite recomendado para
diferentes temperaturas del lubricante:
GRADOTEMPERATURA [C]SAE 5
-25 a 10
SAE 10
-10 a -5
SAE 20
-5 a 5
SAE 30
5 a 40
SAE 40
40 a 50
SAE 50
50 a 60
Siguiendo la recomendacin que los fabricantes presentan en las
grficas o tablas de seleccin, dependiendo de la combinacin de
velocidad y potencia a transmitir , se debe usar uno de los
siguientes mtodos bsicos para lubricar cadenas con aceite: El mtodo
manual consiste en aplicar aceite con una brocha, aceitera o
aerosol, en intervalos de 8 horas de operacin aproximadamente; En
la lubricacin por goteo debe asegurarse que el aceite caiga entre
las placas laterales para que llegue a las superficies de friccin;
El bao de aceite consiste en permitir que en su punto ms bajo la
cadena pase por un depsito en el que se moje totalmente con aceite;
y, mediante el uso de una bomba e inyectores se puede dirigir un
flujo continuo de aceite hacia el hueco entre las placas laterales,
de preferencia justo antes de que los eslabones entren en contacto
con la rueda motriz. Ver figuras No. 1 y No. 2
Figura No. 1
Figura No. 2
Varios fabricantes ofrecen cadenas autolubricadas. Mediante el
uso de bujes de bronce sinterizado impregnado en aceite, materiales
plsticos y otros sistemas, estas cadenas pueden prescindir de
lubricacin externa durante su vida til, ofreciendo ventajas en
aplicaciones que requieren de un alto nivel de limpieza como
proceso y empaque de alimentos, fabricacin y ensamble de partes
electrnicas, elaboracin de productos farmacuticos, fabricacin y
conversin de papel, etc. Las cadenas autolubricadas tienen las
mismas dimensiones bsicas de las cadenas de normas ANSI, BS, ISO,
etc. por lo que pueden trabajar con las mismas ruedas dentadas. La
capacidad de carga y la efectividad del sistema de lubricacin
dependen de la tecnologa empleada y varan de un fabricante a otro.
Por lo tanto, es importante usar la informacin tcnica
correspondiente a la cadena en particular que se est considerando y
de ninguna manera tomar datos de una marca y modelo como vlidos
para otras.
A temperaturas superiores a 100C es necesario usar lubricantes
especiales. Las cadenas que trabajan a temperaturas elevadas
pierden algunas de las caractersticas que los materiales adquieren
durante el tratamiento trmico. Para temperaturas superiores a unos
170C es comn que los fabricantes recomienden que se considere una
capacidad de diseo menor a la publicada, llegando a un 50% para una
temperatura de 250C. No es recomendable usar cadenas estndar por
arriba de esta temperatura.
Ing. Eduardo Nio de Rivera
CADENAS Y RUEDAS DENTADASPARA TRANSMISIN II
COLOCACION DE LAS RUEDAS DENTADAS
El arreglo mas sencillo para una transmisin mediante cadena
tiene los ejes horizontales y una distancia entre centros de los
ejes que puede ir del equivalente a 30 eslabones al equivalente a
50 eslabones de la cadena. Adems, la distancia entre centros debe
permitir un contacto con un mnimo de 120 de la rueda de menor
dimetro. En un arreglo de este tipo, y si la tensin y la alineacin
son adecuadas, la cadena es soportada por las ruedas dentadas y no
requiere de guas. En estas condiciones el lado tenso de la cadena
puede ser indistintamente, el de arriba o el de abajo.
La posicin relativa entre los ejes puede ser horizontal,
inclinada o vertical. Para las transmisiones en que la colocacin
relativa de los ejes es vertical o casi vertical, es preferible que
la rueda dentada motriz sea la de posicin ms elevada, pero, con la
tensin adecuada, el eje motriz puede quedar abajo.
Para arreglos con la lnea entre centros horizontal en que la
distancia entre centros sea corta y no se pueda ajustar, es
preferible que el lado tenso quede arriba, en la condicin contraria
la cadena tiende a salir de la posicin adecuada de contacto con la
rueda dentada. Si la distancie entre centros es muy larga, tambin
es preferible que el lado tenso sea el de arriba para impedir que
el lado suelto haga contacto con el lado tenso.
Para cadenas con placas laterales planas, se recomienda que la
distancia entre centros sea tal que permita un nmero par de
eslabones ya que una cadena con un nmero non de eslabones requiere
de un candado de placas escalonadas.
Para ejes verticales deben usarse guas de soporte o reducir al
mnimo la distancia entre ejes.
En la instalacin se recomienda que la tensin de la cadena
permita un movimiento total A, de 4 a 6 % de la distancia entre
centros, C, para una transmisin horizontal y de 2 a 3% para una
transmisin vertical.
Transmisin horizontal
Transmision vertical
Debido a la enlongacin de la cadena por desgaste, es necesario
que la transmisin tenga una forma de mantener la tensin a medida
que la cadena aumenta de tamao. Para ello se puede ajustar la
distancia entre centros o usar ruedas tensoras locas.
Ajuste de tensin en la cadena, mediante el movimiento de alguno
de los ejes de la transmisin.
Ajuste de tensin en la cadena, mediante el uso de una rueda
tensora loca o jockey.
En la mayora de las aplicaciones industriales las condiciones de
trabajo quedan dentro de los limites prcticos que se han indicado.
Se recomienda consultar con el fabricante si:
La potencia y velocidad de trabajo son superiores a las que
aparecen en las grficas o cuadros de seleccin
Se requieren ruedas con menos de 19 o ms de 114 dientes
Las temperaturas de operacin rebasan los 100C
Las condiciones ambientales se salen de lo normal
El uso es de alto riesgo
Habr un alto volumen de produccin
Ing. Eduardo Nio de Rivera
CADENAS Y RUEDAS DENTADASPARA TRANSMISIN III
TIPOS DE CADENAS
CADENA DE BUJE
Esta es la construccin ms sencilla que encontramos en las
cadenas modernas de transmisin. Consiste en placas laterales, que
pueden ser planas o escalonadas, pernos uniendo la placas
exteriores y bujes para unir las interiores. La funcin del buje es
proporcionar una superficie de contacto ancha para las partes en
deslizamiento y evitar una concentracin de los esfuerzos de
contacto, con su consecuente desgaste acelerado entre el perno y
las placas interiores. La unin entre el buje y las placas laterales
puede ser mediante un ajuste de interferencia o se puede fabricar
una pieza integral soldada, de fundicin o forjada. Debido al
deslizamiento entre el buje y la rueda dentada, la velocidad de
este tipo de cadena es algo limitada.
CADENA DE RODILLO
Como su nombre lo indica, esta cadena, adems del buje, tiene un
rodillo que elimina el deslizamiento entre la rueda dentada y el
buje.
Este tipo de cadena se fabrica bajo diversas normas, las ms
usadas son:
La inglesa, BS 228, equivalente a la ISO 606-B y DIN 8187, que
considera cadena sencilla, doble (o duplex) y triple (o triplex),
con paso entre 0.158" (4 mm) y 4.5" (114.3 mm). Una de las
caractersticas de esta norma es un dimetro de perno amplio que
ofrece mayor resistencia al desgaste de la cadena. De acuerdo al
sistema ISO a esta cadena se le da un nmero de la siguiente forma
xxB-x donde las x representan dgitos, los primeros dos corresponden
al paso en 1/16 de pulgada, y el ltimo indica si la cadena es
sencilla, doble o triple. As, el nmero 12B-2 representa una cadena
doble con paso de 3/4".
La americana, ANSI B29.1, equivalente a la ISO 606-A y DIN 8188,
que contempla hasta cadena decaple (o decaplex) de diez hilos. La
numeracin ISO solo intercambia la letra A por la B de la norma
inglesa. El sistema de numeracin americano le da un nmero entre el
25 (para paso de 1/4") y el 200 (para paso de 2.5"). Esta norma
tambin contempla cadena con placas mas anchas, designada con el
sufijo H y pernos tratados al ncleo, sufijo V. El nmero ANSI 60-2
corresponde a una cadena doble, paso 3/4", y el nmero ANSI 60-2HV
corresponde a la misma cadena pero con placas reforzadas y perno
tratado al ncleo.
Las cadenas fabricadas bajo una de estas normas no deben
intercambiarse ni usarse con ruedas dentadas de la otra.
COMPARACIN DE DIMENSIONES
Ancho [pulgadas]Dimetro del Rodillo
[pulgadas]PasoANSIBSANSIBS3/8
0.168
0.208
0.200
0.250
1/2
0.284
0.283
0.312
0.335
5/8
0.343
0.362
0.400
0.400
3/4
0.459
0.437
0.469
0.475
1
0.575
0.650
0.625
0.625
1 1/4
0.692
0.728
0.750
0.750
1 1/2
0.924
0.949
0.875
1.000
1 3/4
0.924
1.157
1.000
1.100
2
1.156
1.157
1.125
1.151
CADENA DE DIENTE INVERTIDO O SILENCIOSA
En lugar de buje o rodillo esta cadena usa placas de transmisin
con forma de dientes, colocadas alternadamente hacia adelante y
hacia atrs, para hacer contacto con la rueda. La geometra de esta
cadena reduce el efecto poligonal e incrementa la eficiencia, por
arriba de 99%. Hay ligeras diferencias en los diseos de diferentes
fabricantes, que no permiten unir tramos de una marca a tramos de
otras, sin embargo, las cadenas denominadas SC, generalmente
fabricadas bajo la norma ANSI 29.2, pueden trabajar con ruedas de
diferentes fabricantes.
Para mantener la cadena en su posicin, adems de las placas de
transmisin, las cadenas silenciosas llevan placas gua, que pueden
ir en el interior de la cadena o en los extremos. Las ruedas
dentadas debern tener ranuras que correspondan con la colocacin de
las placas gua internas.
La construccin de estas cadenas permite que se fabriquen en
varios anchos, sin tener que recurrir a cadenas mltiples. Los
modelos ms comunes tienen paso que va desde 3/8" hasta 2" con
anchos que pueden variar entre 3/4" y 3" para los pasos menores, y
entre 3" y 6" para los pasos mayores.
Debido a que los dientes de la rueda estn en contacto nicamente
con la mitad de las placas, es aconsejable que las ruedas tengan un
nmero non de dientes para que en cada revolucin los dientes entren
en contacto con el grupo de placas alterno, promoviendo un desgaste
ms parejo en la rueda.
Adems de la cadena estndar, SC, existen otros diseos en los que
el perfil de las placas de transmisin y los dientes de la rueda
imitan el contacto de un pin con una cremallera, permitiendo una
transmisin de mayor capacidad, ms suave, eficiente y
silenciosa.
Como en la cadena de rodillos, es preferible que el nmero de
eslabones de la cadena sea par, porque un nmero non hace necesarias
placas escalonadas en el candado.
Se han diseado tambin pernos de diversas formas que promueven la
suavidad y eficiencia de las transmisiones.
CADENAS ESPECIALES
Para condiciones adversas de trabajo se han desarrollado cadenas
de materiales diversos como acero inoxidable, acero nickelado o
plsticos. Estas cadenas tienen limitaciones en cuanto a capacidad,
velocidad y requerimientos de lubricacin, que deben tomarse en
cuenta para su seleccin.
Tambin se han desarrollado cadenas de formas diversas, llamadas
cadenas de ingeniera y aditamentos para stas y para las cadenas
estndar. Las cadenas de ingeniera y los aditamentos resuelven
algunos problemas que no se prestan al uso de cadenas estndar. En
realidad, los aditamentos y las cadenas de ingeniera se usan ms
para transportacin de materiales que para transmisin de potencia,
por lo que se discutirn ms ampliamente en el capitulo relativo a
movimiento lineal.
CADENAS Y RUEDAS DENTADASPARA TRANSMISIN IV
SELECCIONAl seleccionar una cadena, el primer punto a considerar
es la consecuencia de una falla catastrfica. Normalmente, las
transmisiones cuentan con dispositivos de seguridad para prevenir
las consecuencias de una falla de ese tipo, pero los costos siempre
son elevados. Como hemos visto, las cadenas deben seleccionarse de
manera que la falla sea por desgaste, esto nos ofrece
automticamente, un factor de seguridad (carga de ruptura/carga de
trabajo) mnimo de 8. Sin embargo es importante considerar las
cargas de arranque y las cargas pico.
La informacin requerida para seleccionar una cadena es:
Potencia a transmitir
Velocidades de ambos ejes
Rgimen de trabajo
Tipo de mquina
Tipo de motor
Distancia entre centros deseada
1. Determinar la potencia de diseo Pd, igual a la potencia a
transmitir Pn, por el factor de servicio. Si la informacin es
presentada en forma grfica tambin debe multiplicarse con el factor
de nmero de dientes para la rueda motriz.
Caractersticas de la Mquina Impulsada
Caractersticas del Impulsor
OPERACINSUAVEMotores elctricos, turbinas a vapor o a gas,
motores de combustin interna con acoplamiento hidrulico
GOLPETEO LIGEROMotores de combustin interna de 6 o ms cilindros
y acoplamiento mecnico. motores elctricos con arranques
frecuentes
GOLPETEOMODERADO Motores de combustin interna con menos de 4
cilindros y acoplamiento mecnico
OPRECION SUAVE
Bombas centrfugas y compresores, mquinas punteadoras, calandrias
papeleras, transportadores uniformemente cargados, escaleras,
agitadores para lquidos y mezcladores, secadores rotatorios y
ventiladores.
1
1.1
1.3
GOLPETEO LIGERO
Bombas y compresores (3 o ms cilindros), mquinas mezcladoras de
concreto, transportadores no cargados uniformemente, agitadores y
mezcladores de slidos.
1.4
1.5
1.7
GOLPETEO FUERTE
Aplanadoras, excavadoras, molinos de rodillos y de bolas,
mquinas procesadoras de hule, bombas y compresores de 1 y 2
cilindros, prensas y perforadoras petroleras.
1.8
1.9
2.1
Factores f2 para tamaos estndar de ruedas sprocket
Z1f216
1.27
17
1.12
19
1.00
21
0.91
23
0.83
25
0.76
1. Seleccionar el paso de la cadena usando las grficas o cuadros
de los catlogos o manuales de los fabricantes. Es preferible usar
el paso ms pequeo que pueda transmitir la potencia de diseo y
velocidad requeridas, si una cadena sencilla no puede hacer el
trabajo, se puede considerar una cadena mltiple.
2. Tomando en cuenta restricciones dimensionales impuestas por
el diseo de la mquina y la carga radial que la cadena impondr sobre
el eje, determinar el nmero de dientes para la rueda motriz Z1 y
revisar si el factor de nmero de dientes usado en el primer paso es
correcto. Si es necesario, repetir los primeros tres pasos.
3. Calcular la relacin de velocidades, i, igual a la velocidad
del eje motriz N1, entre la velocidad del eje conducido N2.
1. Determinar el nmero de dientes de la rueda conducida Z2, que
ser igual al No. de dientes en la rueda motriz por la relacin de
velocidades.
1. Calcular el largo de la cadena L, (nmero de eslabones).
En donde:C= distancia deseada entre los centros de los ejes *P=
Paso de la cadena ** se deben usar las mismas unidades en ambas, ya
sean mm o pulgadas.
Este clculo se debe redondear hacia arriba para tener un nmero
par de eslabones.
1. Calcular la distancia real entre los centros de los ejes.
Si la distancia entre centros no queda en el intervalo 30P