Embed Size (px)
Citation preview

© Actus Potentia, Inc. (www.actuspotentia.com)
- 1 -
Truss Example in Two-Dimensions
Ambar K. Mitra
This document contains screen-shots from the software Statics-Power.
Visit www.actuspotentia.com for details.
What is a truss?
A truss is an assembly of two force members (rods or cables) that are joined at their ends with other members by pins. The entire assembly is then supported with
either two pins or with one roller and one pin.
What is truss analysis? • Determine the support forces from the pins/roller.
• Determine the force on each two-force member.
• Determine the nature of the force, i.e. tension/compression, on each two-force member.
Whole Truss Free-Body-Diagram (FBD)
Pin-Roller Supported Truss
Draw FBD of whole truss. Write three equilibrium equations and determine Ax, Ay,
Cy (or Cx).

© Actus Potentia, Inc. (www.actuspotentia.com)
- 2 -
Pin-Pin Supported Truss
In general, the four unknowns, Ax, Ay, Bx, By, cannot be determined from three
equilibrium equations. However, in some special situations, you can determine two out of the four unknowns.
Joint FBD
A pin or joint is a point mass; therefore, we can write two force balance equations
for equilibrium. Find a pin or joint that has two unknown forces. Determine the two unknown forces from the two equilibrium equations. Determine the forces in
all the members by enforcing equilibrium conditions at a series of pins that have two unknown forces.
Sign Convention for the Forces
Consider that three members meet at a joint.
The FBD of the members and the pin are

© Actus Potentia, Inc. (www.actuspotentia.com)
- 3 -
Note that we assumed that all the members are in tension. It is a good idea to
stick to this convention. When we know that a force is compression, while writing
the equilibrium equations, we insert a negative numerical value for this force.
Visual Clue Tensile forces in members show up as arrows pointing outward from a joint.
Zero-Force Member
• No force is acting on the joint P.
• Three members (PQ, PR, PS) meet at the joint. • Two out of three members (PQ and PR) are aligned with one straight line.
• Force on the third member (PS), F(PS) = 0.
• F(RP) = F(PQ)
Example

© Actus Potentia, Inc. (www.actuspotentia.com)
- 4 -
Figure-1a
A truss is supported with two pins at A and F and is loaded as shown. Determine the support forces at the pins and the force on each member. Identify the forces in
the members as tension or compression.
• No force is acting on joint B. • Three members (AB, BC, and BG) meet at the joint.
• Two out of three members (AB and BC) are aligned with one straight line. • Force on the third member, F(BG) = 0.
• F(AB) = F(BC)
By removing the zero-force member BG from the truss, we arrive at the truss of
Figure-1b.

© Actus Potentia, Inc. (www.actuspotentia.com)
- 5 -
Figure-1b
• No force is acting on joint G. • Three members (AG, GF, and GC) meet at the joint.
• Two out of three members (AG and GF) are aligned with one straight line. • Force on the third member, F(GC) = 0.
• F(AG) = F(GF)
By removing the zero-force member GC from the truss, we arrive at the truss of Figure-1c.

© Actus Potentia, Inc. (www.actuspotentia.com)
- 6 -
Figure-1c
• No force is acting on joint C.
• Three members (BC, CD, and CF) meet at the joint. • Two out of three members (BC and CD) are aligned with one straight line.
• Force on the third member, F(CF) = 0. • F(BC) = F(CD)
By removing the zero-force member CF from the truss, we arrive at the truss of
Figure-1d.

© Actus Potentia, Inc. (www.actuspotentia.com)
- 7 -
Figure-1d
Note: By identifying and removing one zero-force member in a truss, you may
start a chain reaction that creates other zero-force members and removal of new zero-force members greatly simplifies the analysis of the truss.
Problem Solution
We choose to enforce the equilibrium conditions at joint E.

© Actus Potentia, Inc. (www.actuspotentia.com)
- 8 -
Figure-1e
• Joint label: E
• Joint coordinate: (7.5,6) • Joint force: (0,-2000)
• Pin/roller at joint: None • Members meet at this joint: 2 (ED and EF)
• Members with unknown forces: 2 (ED and EF) • Member data:
o Member ED
� Label: D � Coordinate of D: (6,6)
� F(ED): unknown o Member EF

© Actus Potentia, Inc. (www.actuspotentia.com)
- 9 -
� Label: F
� Coordinate of F: (6,4) � F(EF): unknown
The equilibrium equations for joint E are:
Figure-1f
By solving the equations, we find:
F(EF) = -2500lb (2500lb compression) F(ED) = 1500lb (1500lb tension)
Next, we choose to enforce the equilibrium conditions at joint F.
© Actus Potentia, Inc. (www.actuspotentia.com)
- 10 -
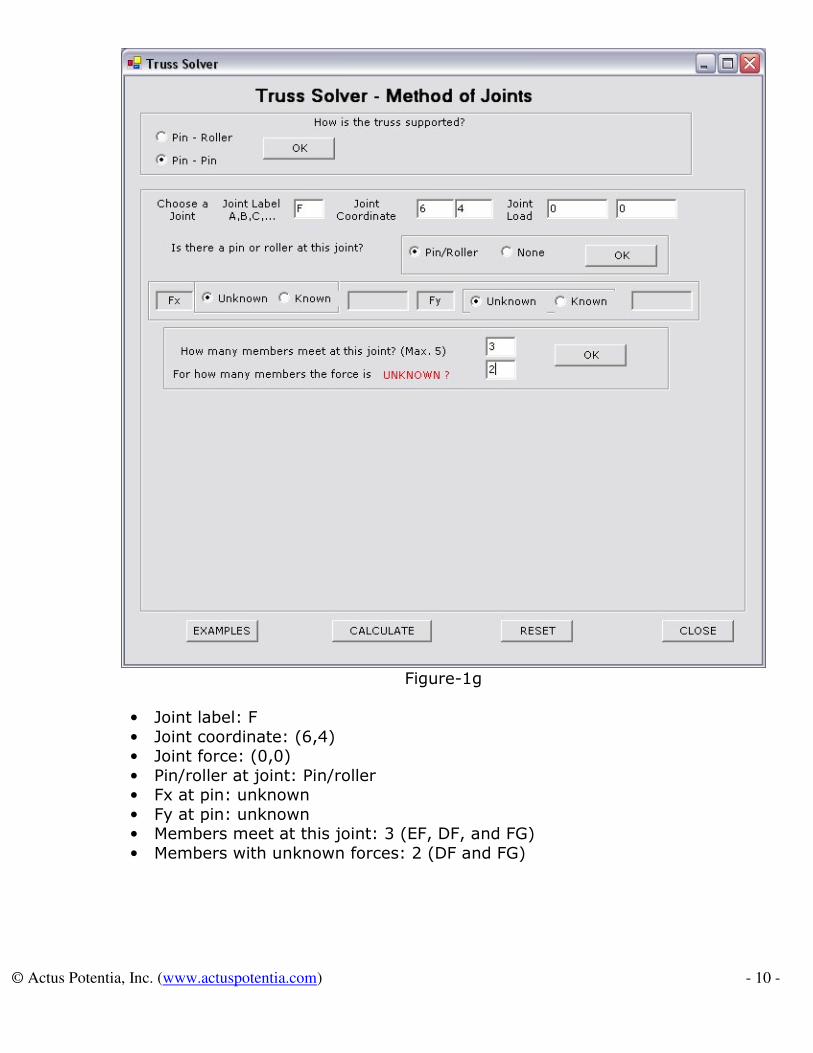
Figure-1g
• Joint label: F
• Joint coordinate: (6,4) • Joint force: (0,0)
• Pin/roller at joint: Pin/roller • Fx at pin: unknown
• Fy at pin: unknown • Members meet at this joint: 3 (EF, DF, and FG)
• Members with unknown forces: 2 (DF and FG)

© Actus Potentia, Inc. (www.actuspotentia.com)
- 11 -
Figure-1h
There are four unknowns at this joint, namely, Fx, Fy, F(DF), and F(FG), and two equilibrium equations. Therefore, this joint is not solvable.
Next, we choose to enforce the equilibrium conditions at joint D.

© Actus Potentia, Inc. (www.actuspotentia.com)
- 12 -
Figure-1i
• Joint label: D • Joint coordinate: (6,6)
• Joint force: (0,-1200) • Pin/roller at joint: None
• Members meet at this joint: 3 (DC, DF, and DE) • Members with unknown forces: 2 (DC and DF)
• Member data: o Member DC
� Label: C � Coordinate of D: (5,5)
� F(DC): unknown
o Member DF � Label: F

© Actus Potentia, Inc. (www.actuspotentia.com)
- 13 -
� Coordinate of F: (6,4)
� F(DF): unknown o Member DE
� Label: E � Coordinate of F: (7.5,6)
� F(DE): known = 1500lb
The equilibrium equations for joint D are:
Figure-1j
By solving the equations we find:
F(DC) = 2121lb = 2121lb (tension)
F(DF) = -2700lb = 2700lb (compression)