Embed Size (px)
Citation preview
Department of Science and Technology Institutionen för teknik och naturvetenskap Linköping University Linköpings Universitet SE-601 74 Norrköping, Sweden 601 74 Norrköping
Examensarbete LITH-ITN-EX--03/010--SE
Tryckpulsgenerering för funktionskalibrering av
mätsystem
Martin Hagborg
2003-06-05
LITH-ITN-EX--03/010--SE
Tryckpulsgenerering för funktionskalibrering av
mätsystem
Examensarbete utfört i Mätteknik vid Linköpings Tekniska Högskola, Campus Norrköping
Martin Hagborg
Handledare: Nils-Erik Andersson Examinator: Carl-Magnus Erzell
Norrköping den 5:e juni 2003
Avdelning, Institution Division, Department
Institutionen för Teknik och Naturvetenskap 581 83 LINKÖPING
Datum Date 2003-06-05
Språk Language
Rapporttyp Report category
ISBN
X Svenska/Swedish Engelska/English
Licentiatavhandling X Examensarbete
ISRN LITH-ITN-EX--03/010--SE
X C-uppsats D-uppsats
Serietitel och serienummer Title of series, numbering
ISSN
Övrig rapport ____
URL för elektronisk version http://www.ep.liu.se/exjobb/itn/2003/de/010/
Titel Title
Tryckpulsgenerering för funktionskalibrering av mätsystem Generation of pressure pulses for calibration of measurement systems
Författare Author
Martin Hagborg
Sammanfattning Abstract The running of gas turbines with low emissions causes high pressure pulsations to arise in the combustion chamber. These pulsations are high amplitude sound vibrations. At some frequencies these are harmful to the gas turbine. Hence these pulsations are monitored to avoid operating conditions where pulsations are specifically harmful. It is necessary to expose the system of known pulsations to verify the functionality of the monitoring process. This report describes the development of a generator of pressure pulsations to verify the monitoring system. The output should be of harmonic form with a frequency of greater than 160 Hz and 15 mbar in amplitude. To begin with, a few alternatives to a pulsation generator are described. In light of studies of these possibilities the alternative based on a roller bearing is selected. This is considered as one of the easier alternatives to design. An existing generator of pressure pulsations has been analyzed. The calculations from this analysis supported the construction of the new device. The new generator far exceeded the specification regarding frequency, amplitude and harmonics of the pulsations. With a few modifications, such as encapsulation, the pulsation generator will be ready for usage. It could then serve as a mobile device for the inspection of the pulsation monitoring system. Possibly the device could be equipped with a faster and stronger motor. This would permit the device to be used for the calibration of pulsation monitoring sensors.
Nyckelord Keyword pulsationer, pulsations, varierande tryck, oscillating pressure
Sammanfattning I gasturbinens brännkammare uppstår det tryckpulsationer. Vid miljövänligare förbränning är detta än mer framträdande. Tryckpulsationer är ljud med hög amplitud och vid vissa frekvenser är dessa skadliga för gasturbinen. Därför övervakas dessa pulsationer så att man kan undvika de drifttillstånd då pulsationerna är särskilt skadliga. Att övervakningssystemet fungerar måste kunna verifieras. Detta görs genom att utsätta systemet för kända pulsationer. I rapporten redovisas framtagandet av en tryckpulsgenerator för verifiering av övervakningssystemet. Generatorn skall generera pulsationer med sinusform. Frekvensen skall vara minst 160 Hz och amplituden minst 15 mbar. Inledningsvis beskrivs några olika alternativ till pulsationsgenerator. Mot denna bakgrund väljs alternativet som baseras på ett rullager. Detta anses vara ett av de alternativ som är enklare att konstruera. En befintlig tryckpulsgenerator har analyserats. Beräkningarna från denna analys har använts som stöd vid konstruktionen av den nya pulsationsgeneratorn. Den nya generatorn uppfyller specifikationen med råge, både vad gäller frekvens, amplitud och övertonshalt hos pulsationerna. Med några modifieringar, så som inkapsling, kan pulsationsgeneratorn tas i bruk. Den kan då tjänstgöra som mobil utrustning vid översyn av pulsationsövervakningssystem. Eventuellt kan generatorn förses med en snabbare och starkare motor. Då skulle den kunna användas vid kalibrering av tryckgivare för pulsationsmätning.
Abstract The running of gas turbines with low emissions causes high pressure pulsations to arise in the combustion chamber. These pulsations are high amplitude sound vibrations. At some frequencies these are harmful to the gas turbine. Hence these pulsations are monitored to avoid operating conditions where pulsations are specifically harmful. It is necessary to expose the system of known pulsations to verify the functionality of the monitoring process. This report describes the development of a generator of pressure pulsations to verify the monitoring system. The output should be of harmonic form with a frequency of greater than 160 Hz and 15 mbar in amplitude. To begin with, a few alternatives to a pulsation generator are described. In light of studies of these possibilities the alternative based on a roller bearing is selected. This is considered as one of the easier alternatives to design. An existing generator of pressure pulsations has been analyzed. The calculations from this analysis supported the construction of the new device. The new generator far exceeded the specification regarding frequency, amplitude and harmonics of the pulsations. With a few modifications, such as encapsulation, the pulsation generator will be ready for usage. It could then serve as a mobile device for the inspection of the pulsation monitoring system. Possibly the device could be equipped with a faster and stronger motor. This would permit the device to be used for the calibration of pulsation monitoring sensors.
Förord Denna rapport är dokumentationen av ett examensarbete utfört på ALSTOM Power Sweden AB (f.d. ABB STAL). ALSTOM med huvudkontor i Frankrike är världsledande inom områdena specialfartyg och tåg samt generering och distribution av kraft. År 2002 var omsättningen € 23 miljarder och antalet anställda uppgick till 118 000. ALSTOM Power Sweden med ca 3000 anställda har huvudkontor i Finspång och omsatte ca 5,5 miljarder SEK. I Finspång utvecklas och tillverkas främst gasturbiner som sedan säljs på en global marknad. Gasturbinerna finns i varianter från 15 till 50 MW på utgående axel. Dessa har lägre utsläpp än många av sina konkurrenter. Arbetet utfördes i Finspång på avdelningen Measurement Systems & Instrumentation (RDM). Jag vill tacka följande personer som har hjälpt mig under mitt arbete och/eller sett till att det blivit till: Nils-Erik Andersson, RDM, Handledare Carl-Magnus Erzell, Examinator, ITN/LiU Markus Loberg, Chef RDM Anders Persson, RDV Björn Larsson, RDD Kenneth Lekberg, RDM Lars-Erik Fagerberg, Chef PSSI Mikael Karlsson, PSSI Reine Lundqvist, RDM Sven Lilja, RDE Ödi Dénes, RDM (CAD-konsult från Brocon AB i Linköping)
Innehållsförteckning 1 INLEDNING........................................................................................ 1
1.1 BAKGRUND .................................................................................... 1 1.2 PROBLEMATISERING / KRAVSPECIFIKATION.................................... 2 1.3 ARBETSGÅNG ................................................................................. 2
2 ALTERNATIVA TRYCKPULSGENERATORER........................ 3
2.1 VARIERANDE FLÖDE....................................................................... 3 2.1.1 Pneumatisk kolvvibrator ........................................................... 3 2.1.2 Rullager..................................................................................... 3 2.1.3 Ventil ......................................................................................... 5 2.1.4 Hålskiva..................................................................................... 6 2.1.5 Luftförstärkare .......................................................................... 6
2.2 AKUSTIK ........................................................................................ 6 2.2.1 Högtalare .................................................................................. 6 2.2.2 Kolv kopplad till modal exciterare ........................................... 6 2.2.3 Kolvmotor driven av en elmotor ............................................... 9
3 VAL AV TRYCKPULSGENERATOR.......................................... 10
3.1 STUDIE AV BEFINTLIG KALIBRERINGSUTRUSTNING....................... 10 3.2 SIMULERING AV RULLAGRET ........................................................ 15
4 KONSTRUKTION AV RULLAGERPULSATORN .................... 17
4.1 RULLAGER ................................................................................... 17 4.2 AXELADAPTER ............................................................................. 18 4.3 PULSATIONSKAMMARE................................................................. 18 4.4 MOTOR......................................................................................... 19 4.5 BOTTENPLATTA............................................................................ 20 4.6 LAGERBOCK ................................................................................. 21 4.7 MÄT- OCH TRYCKANSLUTNING .................................................... 21
5 TEST AV RULLAGERPULSATORN ........................................... 22
5.1 MÄTDATAINSAMLING................................................................... 22
6 RESULTAT ....................................................................................... 26
7 REFERENSER.................................................................................. 27
Figurförteckning FIGUR 1; GASTURBIN GTX100 I GENOMSKÄRNING......................................... 1 FIGUR 2; DYNAMISK TRYCKGIVARE................................................................ 2 FIGUR 3; CAD-MODELL AV SKF RULLAGER NCF 3004 CV MED HÅL I
YTTERBANAN.......................................................................................... 3 FIGUR 4; KOLV KOPPLAD TILL SHAKER ........................................................... 6 FIGUR 5; PRINCIPSKISS KALIBRERINGSSYSTEM ............................................. 10 FIGUR 6; BILD KALIBRERINGSSYSTEM........................................................... 11 FIGUR 7; RITNING ÖVER HÅLSKIVAN I PULSATOR ......................................... 12 FIGUR 8; GRAF FÖR TRYCK PULSATOR.......................................................... 12 FIGUR 9; PLOTT BASERAD PÅ BERÄKNINGAR AV PULSATORS DIMENSIONER . 15 FIGUR 10; CAD-MODELL AV RULLAGERPULSATOR ...................................... 17 FIGUR 11; RULLAGER MED KVADRATISKA HÅL............................................. 17 FIGUR 12; AXELADAPTER ............................................................................. 18 FIGUR 13; PULSATIONSKAMMARE ................................................................ 19 FIGUR 14; PERMANENTMAGNETISERAD LIKSTRÖMSMOTOR .......................... 19 FIGUR 15; BOTTENPLATTA............................................................................ 20 FIGUR 16; LAGERBOCK ................................................................................. 21 FIGUR 17; GIVARHÅLLARE............................................................................ 21 FIGUR 18; TESTUPPKOPPLING KÖRNING 0 ..................................................... 23 FIGUR 19; TIDSSIGNAL OCH PSD FÖR KÖRNING 0 ......................................... 23 FIGUR 20; TESTUPPKOPPLING KÖRNING 1-7.................................................. 24 FIGUR 21; TIDSSIGNAL OCH PSD FÖR KÖRNING 3, LILLA HÅLET................... 24

Tabellförteckning TABELL 1; SAMMANSTÄLLNING ÖVER CYLINDRISKA FULLKOMPLEMENT-
RULLAGER .............................................................................................. 5 TABELL 2; TRYCK PULSATOR ....................................................................... 12 TABELL 3; BERÄKNINGAR I OLIKA STEG DÅ HÅLSKIVANS HÅL PASSERAR
MUNSTYCKET ....................................................................................... 14 TABELL 4; PLOTTAR BASERADE PÅ RULLAGRETS DIMENSIONER ................... 16
Bilagor BILAGA 1; MATLAB-FUNKTION SOM BERÄKNAR OCH PLOTTAR AREAN SOM
FUNKTION AV TIDEN. DETTA DÅ EN RULLE PASSERAR ETT HÅL I LAGRETS YTTERBANA
BILAGA 2; KOMPONENTFÖRTECKNING FÖR RULLAGERPULSATORN BILAGA 3; CAD-RITNINGAR FÖR RULLAGERPULSATORN BILAGA 4; PROVPROGRAM OCH GRAFER FRÅN MÄTNING BILAGA 5; MATLAB-FUNKTIONER FÖR BEHANDLING AV RÅDATA, PSD-
BERÄKNING OCH PLOTTNING
1
1 Inledning
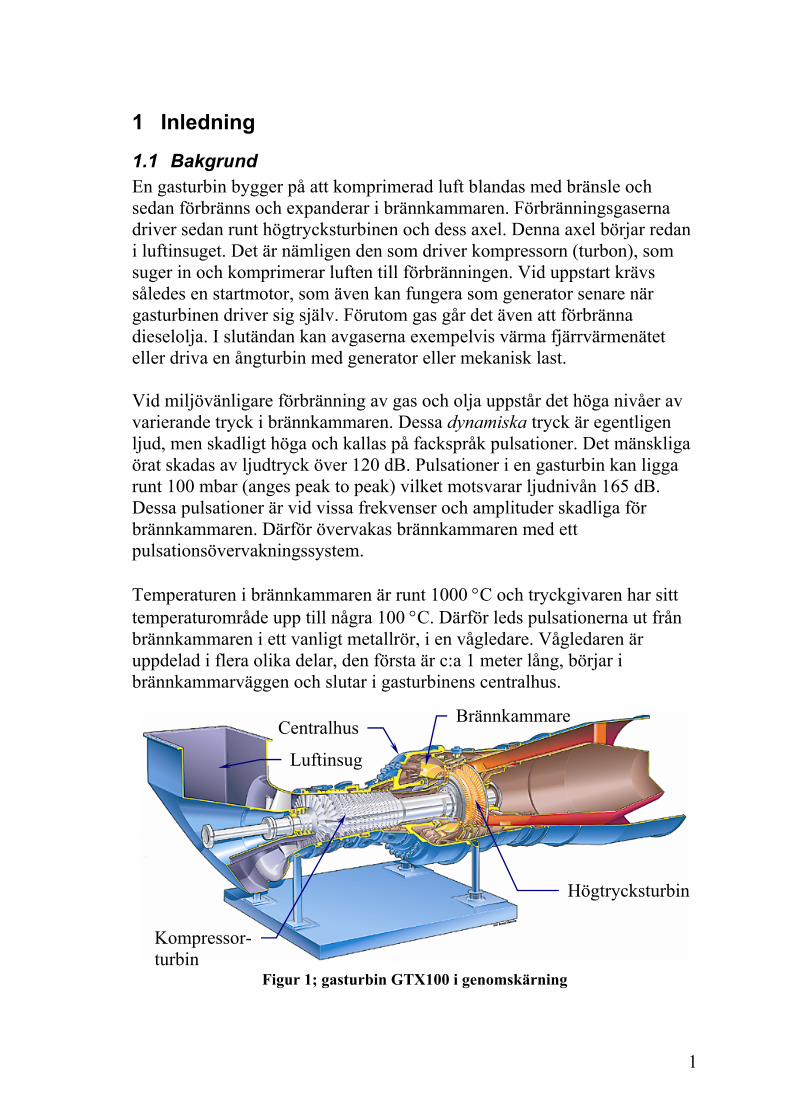
1.1 Bakgrund En gasturbin bygger på att komprimerad luft blandas med bränsle och sedan förbränns och expanderar i brännkammaren. Förbränningsgaserna driver sedan runt högtrycksturbinen och dess axel. Denna axel börjar redan i luftinsuget. Det är nämligen den som driver kompressorn (turbon), som suger in och komprimerar luften till förbränningen. Vid uppstart krävs således en startmotor, som även kan fungera som generator senare när gasturbinen driver sig själv. Förutom gas går det även att förbränna dieselolja. I slutändan kan avgaserna exempelvis värma fjärrvärmenätet eller driva en ångturbin med generator eller mekanisk last. Vid miljövänligare förbränning av gas och olja uppstår det höga nivåer av varierande tryck i brännkammaren. Dessa dynamiska tryck är egentligen ljud, men skadligt höga och kallas på fackspråk pulsationer. Det mänskliga örat skadas av ljudtryck över 120 dB. Pulsationer i en gasturbin kan ligga runt 100 mbar (anges peak to peak) vilket motsvarar ljudnivån 165 dB. Dessa pulsationer är vid vissa frekvenser och amplituder skadliga för brännkammaren. Därför övervakas brännkammaren med ett pulsationsövervakningssystem. Temperaturen i brännkammaren är runt 1000 °C och tryckgivaren har sitt temperaturområde upp till några 100 °C. Därför leds pulsationerna ut från brännkammaren i ett vanligt metallrör, i en vågledare. Vågledaren är uppdelad i flera olika delar, den första är c:a 1 meter lång, börjar i brännkammarväggen och slutar i gasturbinens centralhus.
Figur 1; gasturbin GTX100 i genomskärning
Brännkammare Centralhus
Luftinsug
Kompressor-turbin
Högtrycksturbin
2
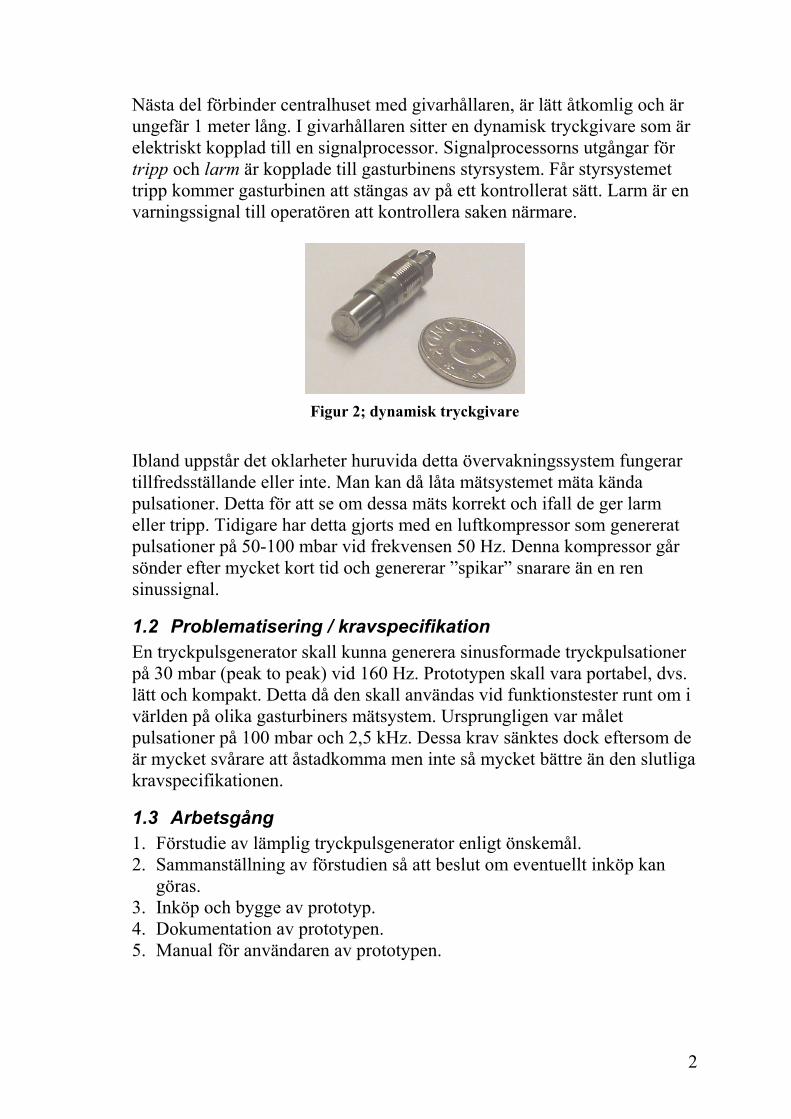
Nästa del förbinder centralhuset med givarhållaren, är lätt åtkomlig och är ungefär 1 meter lång. I givarhållaren sitter en dynamisk tryckgivare som är elektriskt kopplad till en signalprocessor. Signalprocessorns utgångar för tripp och larm är kopplade till gasturbinens styrsystem. Får styrsystemet tripp kommer gasturbinen att stängas av på ett kontrollerat sätt. Larm är en varningssignal till operatören att kontrollera saken närmare.
Figur 2; dynamisk tryckgivare
Ibland uppstår det oklarheter huruvida detta övervakningssystem fungerar tillfredsställande eller inte. Man kan då låta mätsystemet mäta kända pulsationer. Detta för att se om dessa mäts korrekt och ifall de ger larm eller tripp. Tidigare har detta gjorts med en luftkompressor som genererat pulsationer på 50-100 mbar vid frekvensen 50 Hz. Denna kompressor går sönder efter mycket kort tid och genererar ”spikar” snarare än en ren sinussignal.
1.2 Problematisering / kravspecifikation En tryckpulsgenerator skall kunna generera sinusformade tryckpulsationer på 30 mbar (peak to peak) vid 160 Hz. Prototypen skall vara portabel, dvs. lätt och kompakt. Detta då den skall användas vid funktionstester runt om i världen på olika gasturbiners mätsystem. Ursprungligen var målet pulsationer på 100 mbar och 2,5 kHz. Dessa krav sänktes dock eftersom de är mycket svårare att åstadkomma men inte så mycket bättre än den slutliga kravspecifikationen.
1.3 Arbetsgång 1. Förstudie av lämplig tryckpulsgenerator enligt önskemål. 2. Sammanställning av förstudien så att beslut om eventuellt inköp kan
göras. 3. Inköp och bygge av prototyp. 4. Dokumentation av prototypen. 5. Manual för användaren av prototypen.
3
2 Alternativa tryckpulsgeneratorer
2.1 Varierande flöde Gemensamt för några av dessa alternativ är att man med ett varvtal skapar pulsationer; 160 Hz = 160 rps = 60*160 rpm = 9600 rpm
2.1.1 Pneumatisk kolvvibrator Ingenjörsfirman Bågenfelt & Hellström AB säljer pneumatiska kolvvibratorer. Vid kontakt med företaget visade det sig att vibratorn åstadkom pulsationer. Dessa pulsationer sträcker sig upp till några hundra Hz. Dock kunde ingen dokumentation lämnas om produkten.
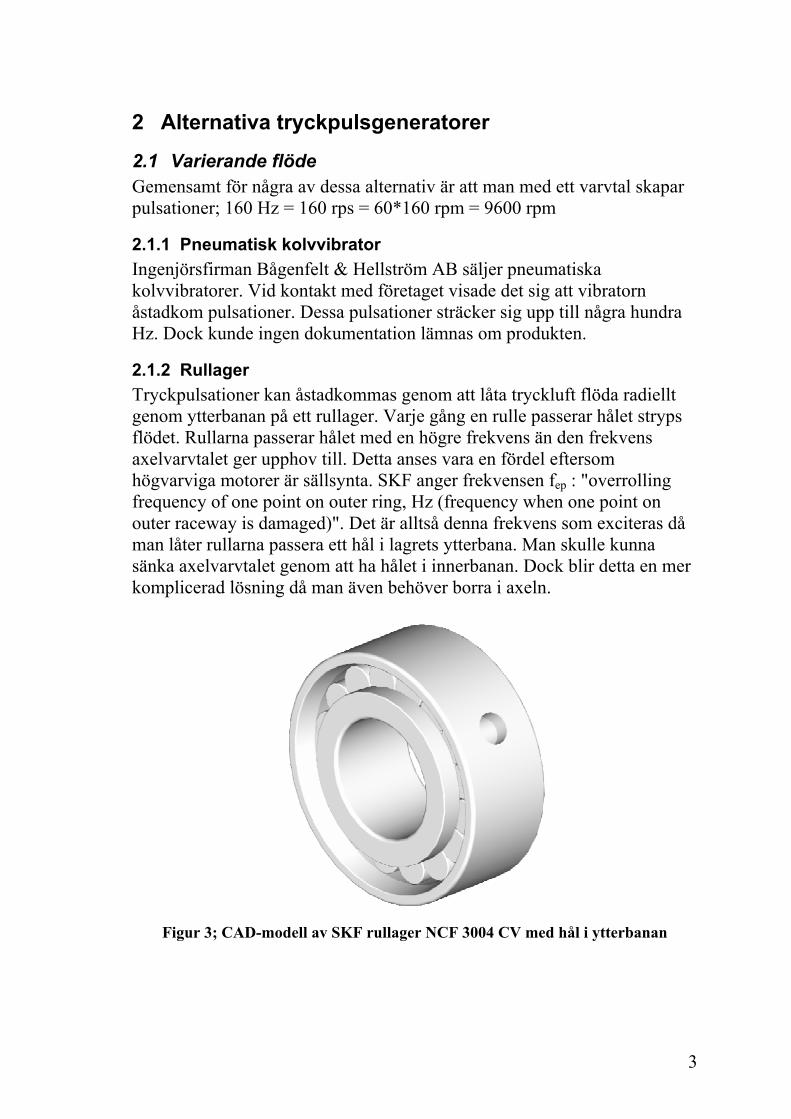
2.1.2 Rullager Tryckpulsationer kan åstadkommas genom att låta tryckluft flöda radiellt genom ytterbanan på ett rullager. Varje gång en rulle passerar hålet stryps flödet. Rullarna passerar hålet med en högre frekvens än den frekvens axelvarvtalet ger upphov till. Detta anses vara en fördel eftersom högvarviga motorer är sällsynta. SKF anger frekvensen fep : "overrolling frequency of one point on outer ring, Hz (frequency when one point on outer raceway is damaged)". Det är alltså denna frekvens som exciteras då man låter rullarna passera ett hål i lagrets ytterbana. Man skulle kunna sänka axelvarvtalet genom att ha hålet i innerbanan. Dock blir detta en mer komplicerad lösning då man även behöver borra i axeln.
Figur 3; CAD-modell av SKF rullager NCF 3004 CV med hål i ytterbanan
4
När man diskuterar maxvarvtal så finns det två olika angivelser i datablad beroende på smörjningen, för olja eller fett. Dock är det tveksamt om det går att smörja lagret över huvud taget vid det höga luftflödet. Eftersom att lagret inte skall belastas och dessutom kommer att bli luftkylt har det högre av dessa två maxvarvtal valts. Man kan få rullager antingen med eller utan hållare. Hållare håller rullarna på plats och gör att lagren kan användas vid högre varvtal. Dock medför hållare att det inte medges lika stort eller otillräckligt luftflöde genom lagret. Ett problem är att om man inte har någon last börjar rullarna glida i stället för att rulla. Vid högre varvtal krävs större belastning för att rullarna inte skall börja glida. Denna belastning skulle kunna sänkas om man sänker varvtalet. Man kan åstadkomma detta enligt tidigare resonemang med hålet på lagrets innerbana. Med dessa fakta har ett cylindriskt enradigt rullager utan hållare valts. Några viktiga data och beräkningar för olika storlekar och modeller har sammanställts i Tabell 1. axel: axeldiameter [cm]. nolja: maximalt varvtal med oljesmörjning [krpm]. fpuls: pulsationsfrekvens vid nolja [kHz] (SKF anger vad frekvensen blir om man har en skada på en viss punkt på rullbanan). frullar: frekvensen hos rullarsammansättningen [kHz]. ggr: hur många gånger för fort lagret behöver gå för att komma upp i pulsationer på 2,5 kHz. n: varvtal då önskad pulsation uppnås [krpm]. F: minsta belastning för att rullarna inte skall börja glida vid pulsationer på 2,5 kHz. [kN] y eller i som sista bokstav: med hål i ytterbana respektive innerbana. Sammanställning över lager, tabellen är för pulsationsfrekvensen 2,5 kHz, så tabellen är bara användbar för jämförande av lager sinsemellan.
5
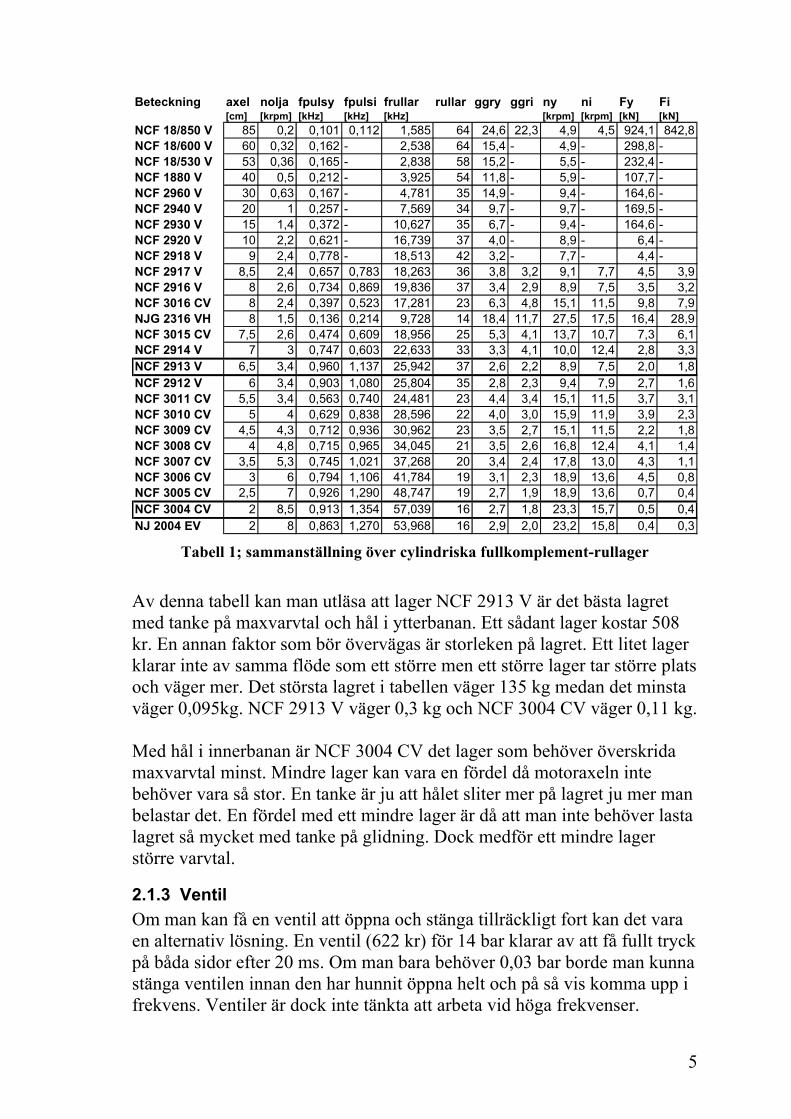
Beteckning axel nolja fpulsy fpulsi frullar rullar ggry ggri ny ni Fy Fi[cm] [krpm] [kHz] [kHz] [kHz] [krpm] [krpm] [kN] [kN]
NCF 18/850 V 85 0,2 0,101 0,112 1,585 64 24,6 22,3 4,9 4,5 924,1 842,8NCF 18/600 V 60 0,32 0,162 - 2,538 64 15,4 - 4,9 - 298,8 -NCF 18/530 V 53 0,36 0,165 - 2,838 58 15,2 - 5,5 - 232,4 -NCF 1880 V 40 0,5 0,212 - 3,925 54 11,8 - 5,9 - 107,7 -NCF 2960 V 30 0,63 0,167 - 4,781 35 14,9 - 9,4 - 164,6 -NCF 2940 V 20 1 0,257 - 7,569 34 9,7 - 9,7 - 169,5 -NCF 2930 V 15 1,4 0,372 - 10,627 35 6,7 - 9,4 - 164,6 -NCF 2920 V 10 2,2 0,621 - 16,739 37 4,0 - 8,9 - 6,4 -NCF 2918 V 9 2,4 0,778 - 18,513 42 3,2 - 7,7 - 4,4 -NCF 2917 V 8,5 2,4 0,657 0,783 18,263 36 3,8 3,2 9,1 7,7 4,5 3,9NCF 2916 V 8 2,6 0,734 0,869 19,836 37 3,4 2,9 8,9 7,5 3,5 3,2NCF 3016 CV 8 2,4 0,397 0,523 17,281 23 6,3 4,8 15,1 11,5 9,8 7,9NJG 2316 VH 8 1,5 0,136 0,214 9,728 14 18,4 11,7 27,5 17,5 16,4 28,9NCF 3015 CV 7,5 2,6 0,474 0,609 18,956 25 5,3 4,1 13,7 10,7 7,3 6,1NCF 2914 V 7 3 0,747 0,603 22,633 33 3,3 4,1 10,0 12,4 2,8 3,3NCF 2913 V 6,5 3,4 0,960 1,137 25,942 37 2,6 2,2 8,9 7,5 2,0 1,8NCF 2912 V 6 3,4 0,903 1,080 25,804 35 2,8 2,3 9,4 7,9 2,7 1,6NCF 3011 CV 5,5 3,4 0,563 0,740 24,481 23 4,4 3,4 15,1 11,5 3,7 3,1NCF 3010 CV 5 4 0,629 0,838 28,596 22 4,0 3,0 15,9 11,9 3,9 2,3NCF 3009 CV 4,5 4,3 0,712 0,936 30,962 23 3,5 2,7 15,1 11,5 2,2 1,8NCF 3008 CV 4 4,8 0,715 0,965 34,045 21 3,5 2,6 16,8 12,4 4,1 1,4NCF 3007 CV 3,5 5,3 0,745 1,021 37,268 20 3,4 2,4 17,8 13,0 4,3 1,1NCF 3006 CV 3 6 0,794 1,106 41,784 19 3,1 2,3 18,9 13,6 4,5 0,8NCF 3005 CV 2,5 7 0,926 1,290 48,747 19 2,7 1,9 18,9 13,6 0,7 0,4NCF 3004 CV 2 8,5 0,913 1,354 57,039 16 2,7 1,8 23,3 15,7 0,5 0,4NJ 2004 EV 2 8 0,863 1,270 53,968 16 2,9 2,0 23,2 15,8 0,4 0,3
Tabell 1; sammanställning över cylindriska fullkomplement-rullager
Av denna tabell kan man utläsa att lager NCF 2913 V är det bästa lagret med tanke på maxvarvtal och hål i ytterbanan. Ett sådant lager kostar 508 kr. En annan faktor som bör övervägas är storleken på lagret. Ett litet lager klarar inte av samma flöde som ett större men ett större lager tar större plats och väger mer. Det största lagret i tabellen väger 135 kg medan det minsta väger 0,095kg. NCF 2913 V väger 0,3 kg och NCF 3004 CV väger 0,11 kg. Med hål i innerbanan är NCF 3004 CV det lager som behöver överskrida maxvarvtal minst. Mindre lager kan vara en fördel då motoraxeln inte behöver vara så stor. En tanke är ju att hålet sliter mer på lagret ju mer man belastar det. En fördel med ett mindre lager är då att man inte behöver lasta lagret så mycket med tanke på glidning. Dock medför ett mindre lager större varvtal.
2.1.3 Ventil Om man kan få en ventil att öppna och stänga tillräckligt fort kan det vara en alternativ lösning. En ventil (622 kr) för 14 bar klarar av att få fullt tryck på båda sidor efter 20 ms. Om man bara behöver 0,03 bar borde man kunna stänga ventilen innan den har hunnit öppna helt och på så vis komma upp i frekvens. Ventiler är dock inte tänkta att arbeta vid höga frekvenser.
6
2.1.4 Hålskiva Mätkedjan vågledare och tryckgivare kalibreras i dagsläget med ”Pulsator”. I denna passerar ett luftflöde en roterande hålskiva och på så vis skapas oscilleringar i flödet. Fördelen är att man kan ha ett varvtal beroende av antal hål i skivan och önskad frekvens. En svårighet kan dock vara att få tätt kring hålskivan. Lite läckage är dock acceptabelt då man ansluter 6 bar verkstadsluft medan den önskade pulsationsamplituden ligger på 0,03 bar.
2.1.5 Luftförstärkare Förstärker upp tryckluft 4 ggr, väger 3 kg och kostar 6.300kr, större förstärkning påverkar nästan enbart priset. Ger pulsationer på c:a 100 Hz. Denna förstärkare bygger på att ventiler öppnar och stänger flöden till och från en cylinder med kolv. Detta genererar pulsationer men dessa blir liksom en vanlig kompressor av impulstyp och avslutas när man uppnått ett visst statiskt tryck.
2.2 Akustik Nackdelen med de pulsationer som bygger på flöden skulle kunna vara att det blir impulser snarare än en ren sinuskurva, alltså mycket övertoner. Med akustiska metoder borde man kunna få en renare sinus, med mindre övertoner. Akustiker brukar relatera dynamiskt tryck till 20µPa rms (Sound Pressure Level, SPL); 0,03 bar (= 3000 Pa) dynamiskt tryck peak to peak = 3000/2/ √2 Pa rms = 1060 Pa rms = 20log(1060Pa / 20µPa) dB= 154 dB.
2.2.1 Högtalare En högtalare som enbart verkar i ett rör har ju mindre luftvolym att förflytta, detta borde ju vara en fördel jämfört med vanliga högtalare. Ett exempel är att jämföra hörlurar med vanliga högtalare. Sådana man stoppar i öronen upplevs ju spela väldigt högt medan det går åt ordentliga förstärkare och högtalare för att åstadkomma samma ljudupplevelse. En specialvariant av högtalare där membranet är ersatt av en kolv i ett rör kanske kunde vara ett alternativ.
2.2.2 Kolv kopplad till modal exciterare Tryckpulsationer kan åstadkommas genom att koppla en kolv till en modal exciterare, en "shaker". En shaker är ett verktyg för att generera vibrationer.
Figur 4; kolv kopplad till shaker
Shaker Kolvstång
Kolv

7
Beräkningar, som även skulle kunna gälla membranet i en högtalare:
smu
u
smu
NTPu
Pabarpsmc
mkg
cp
uucp
NTPbar
NTP
38,020
5,733021,1
103:ryckatmosfärst
:shakerpåhettopphastig
10303,0:rpulsationeönskade
330:luftihetljudhastig
21,1:densitetluftens
20
3
3
30
00
≈≈
≈⋅⋅
≈
⋅==
≈
≈
⋅=⇒⋅⋅=
ρ
ρρ
7,5 m/s är mer än vad en rimlig shaker klarar av. Dock skulle man kunna höja ljudhastigheten o/e densiteten. Detta kan åstadkommas genom att byta medium till t.ex. vatten eller att höja trycket. Med vatten krävs en hastighet på 2 mm/s, dock kan vatten tänkas vara svårare att hantera, med avseende på bl.a. tätning. Höjer man lufttrycket till samma nivå som i brännkammaren, 20 bar, ökar man densiteten med en faktor 20. Man kommer då ner på mer rimliga 0,38 m/s. Att öka trycket till brännkammarförhållanden anses vara en fördel då systemet blir mer likt verkligheten (den vågledare som är mellan tryckpulsgeneratorn och givaren har även en dämpkurva som funktion av trycket). Det fungerar i sådana fall även som ett läcktest. Detta skulle kunna realiseras med den luftförstärkare som tidigare nämnts. Vidare beräkningar med avseende på shakern:
mmx
mmx
Hzff
x
ux
bar
NTP
38,01602
38,0
5,716025,7
160:frekvens2:vensvinkelfrekrörelsens
:slaglängdshakerns
20≈
⋅⋅=
≈⋅⋅
=
=⋅⋅=Ω
Ω=
π
π
π
Man inser av ekvationen ovan att slaglängden inte är något problem ty slaglängder brukar ligga kring en tum (2,54 cm).

8
ga
ga
ggaaaga
smfuu
smfuu
ux
axa
barg
NTPg
gg
3881,9
380
77081,9
760081,9
380160238,02a
760016025,72a
:onaccelerati
20|
|
2bar20
2NTP
2
≈=
≈=
≈
=⇒=⋅
≈⋅⋅⋅=⋅⋅⋅=Ω⋅=
≈⋅⋅⋅=⋅⋅⋅=Ω⋅=
Ω=
Ω⋅=
ππ
ππ
Typiska shakers klarar acceleration på några g, alltså behövs det en mycket stor och dyr shaker. Beräknad kraft som krävs av shakern:
mNFgramrlm
rlmm
mmmamF
bar
Al
Alkolvstångkolv
kolvstångkolv
25,038,000068,068,0002,001,0700222
20
22
2
=⋅==⋅⋅⋅⋅=⋅⋅⋅⋅=
⋅⋅⋅==
+=⋅=
ππδ
πδ
Om kolvens cylinder har samma innerdiameter som vågledaren anses det vara en fördel. Detta då man inte behöver ta hänsyn till de reflexioner som en övergång i diameter skulle kunna innebära. Det är svårt att avgöra hur en kolvstång skulle kunna se ut så den antas ha samma massa som kolven. Då kraften som krävs gott och väl kan levereras av en rimlig shaker läggs det inte ner någon mer möda på kolv och kolvstång i det här skedet. En annan intressant lösning för att komma upp i den höga amplituden är att använda sig av resonans. Detta m.h.a. en kolv (massa), fjäder och dämpare enligt företaget Endevco’s litteratur. Dock är det en nackdel att behöva ha olja i vågledaren. Nackdelen är att bara en frekvens blir aktuell medan andra alternativ låter frekvensen varieras.
9
2.2.3 Kolvmotor driven av en elmotor En högvarvig hobby/modellmotor (c:a 2000kr) som går att köpa på leksaks/hobby-affärer innehåller en kolv som skulle kunna generera pulsationer. Sådana motorer har axelvarvtal på upp emot 50.000 rpm (≈ 830 Hz). Där glödstiftet sitter skulle man kunna ansluta vågledaren. Det problematiska är i så fall smörjningen som man nog får välja bort. Det är inte så bra om man får smörjmedel i vågledaren. Det borde vara en fördel att det inte bli någon värme/kompression från förbränningen.
10
3 Val av tryckpulsgenerator Efter övervägning av de olika alternativen valdes idén med rullager. En tanke fanns att en hålskiva var det bästa alternativet. Detta då det bevisligen fungerar i Pulsator och det vid högre amplituder och frekvenser än vad som behövs. Tätningen mellan hålskivan och munstycket måste konstrueras med stor noggrannhet, vilket blir svårt och dyrt. Därför valdes i stället rullagret då denna idé bygger på standardkomponenter sånär som på inkapslingen och axeladaptern. Dessa anses emellertid vara enkla att konstruera. I fortsättningen kommer denna idé att kallas ”rullagerpulsator”.
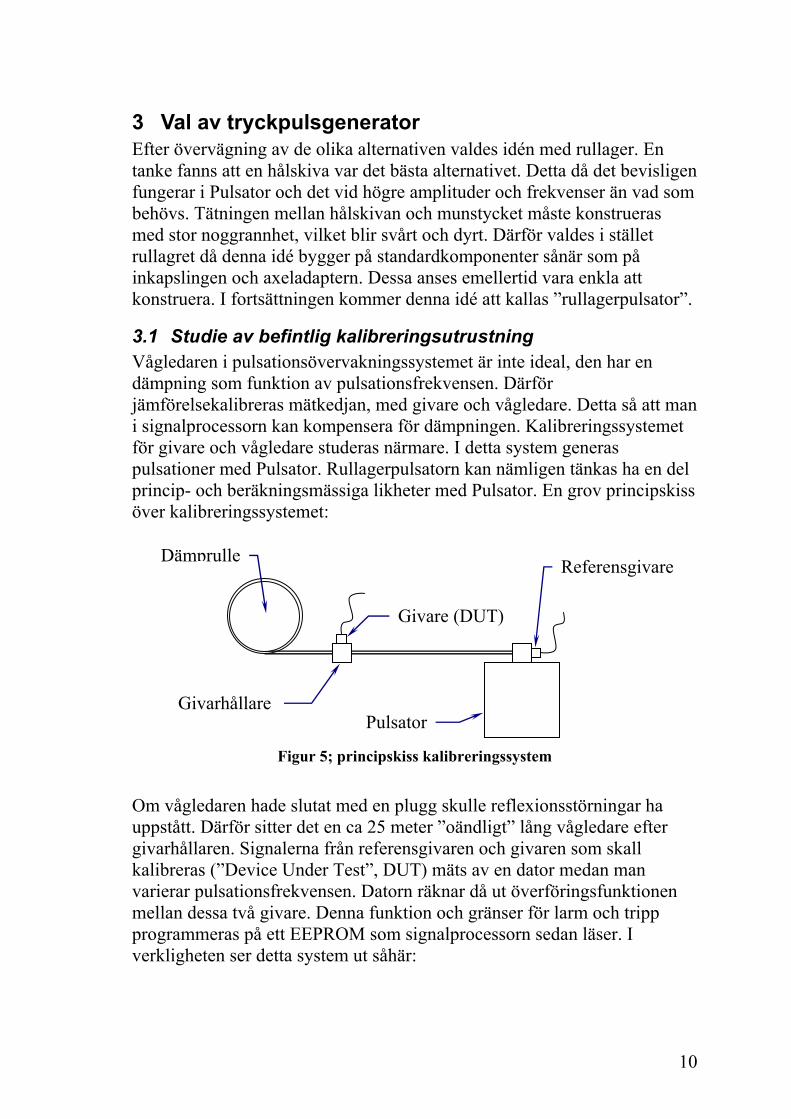
3.1 Studie av befintlig kalibreringsutrustning Vågledaren i pulsationsövervakningssystemet är inte ideal, den har en dämpning som funktion av pulsationsfrekvensen. Därför jämförelsekalibreras mätkedjan, med givare och vågledare. Detta så att man i signalprocessorn kan kompensera för dämpningen. Kalibreringssystemet för givare och vågledare studeras närmare. I detta system generas pulsationer med Pulsator. Rullagerpulsatorn kan nämligen tänkas ha en del princip- och beräkningsmässiga likheter med Pulsator. En grov principskiss över kalibreringssystemet:
Figur 5; principskiss kalibreringssystem
Om vågledaren hade slutat med en plugg skulle reflexionsstörningar ha uppstått. Därför sitter det en ca 25 meter ”oändligt” lång vågledare efter givarhållaren. Signalerna från referensgivaren och givaren som skall kalibreras (”Device Under Test”, DUT) mäts av en dator medan man varierar pulsationsfrekvensen. Datorn räknar då ut överföringsfunktionen mellan dessa två givare. Denna funktion och gränser för larm och tripp programmeras på ett EEPROM som signalprocessorn sedan läser. I verkligheten ser detta system ut såhär:
Referensgivare
Givare (DUT)
Dämprulle
Givarhållare Pulsator
11
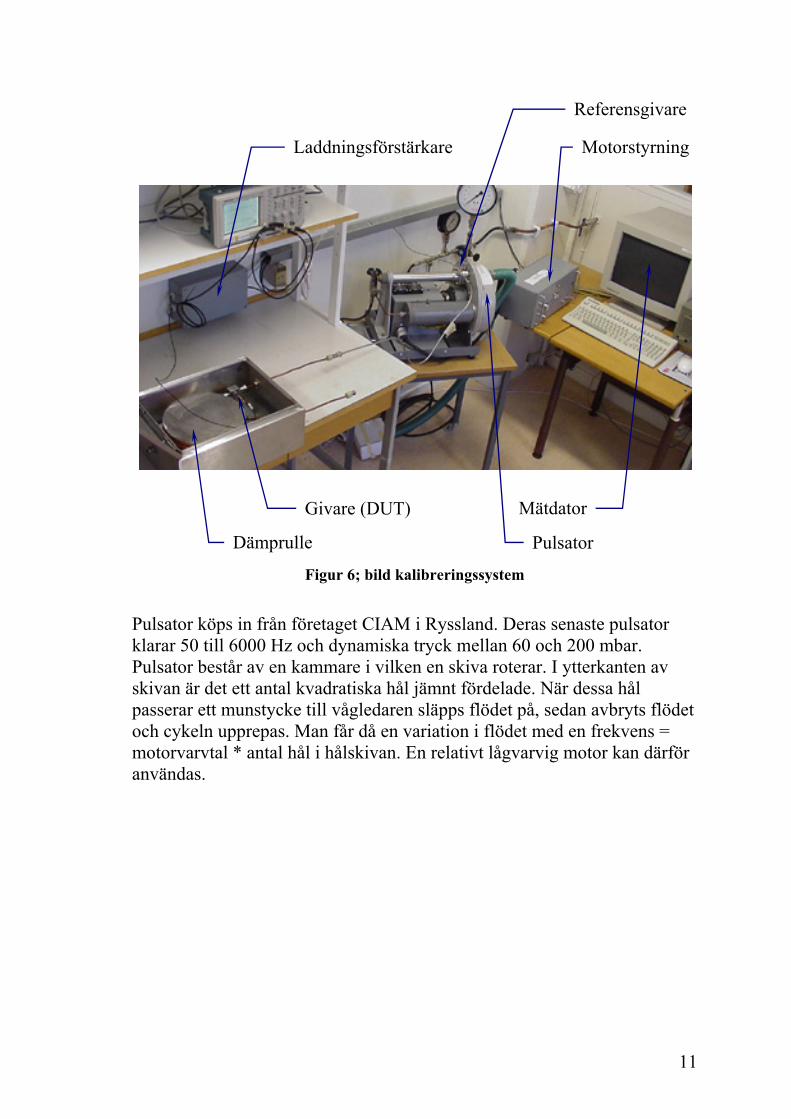
Figur 6; bild kalibreringssystem
Pulsator köps in från företaget CIAM i Ryssland. Deras senaste pulsator klarar 50 till 6000 Hz och dynamiska tryck mellan 60 och 200 mbar. Pulsator består av en kammare i vilken en skiva roterar. I ytterkanten av skivan är det ett antal kvadratiska hål jämnt fördelade. När dessa hål passerar ett munstycke till vågledaren släpps flödet på, sedan avbryts flödet och cykeln upprepas. Man får då en variation i flödet med en frekvens = motorvarvtal * antal hål i hålskivan. En relativt lågvarvig motor kan därför användas.
Laddningsförstärkare
Referensgivare
Motorstyrning
Givare (DUT)
Dämprulle
Mätdator
Pulsator
12
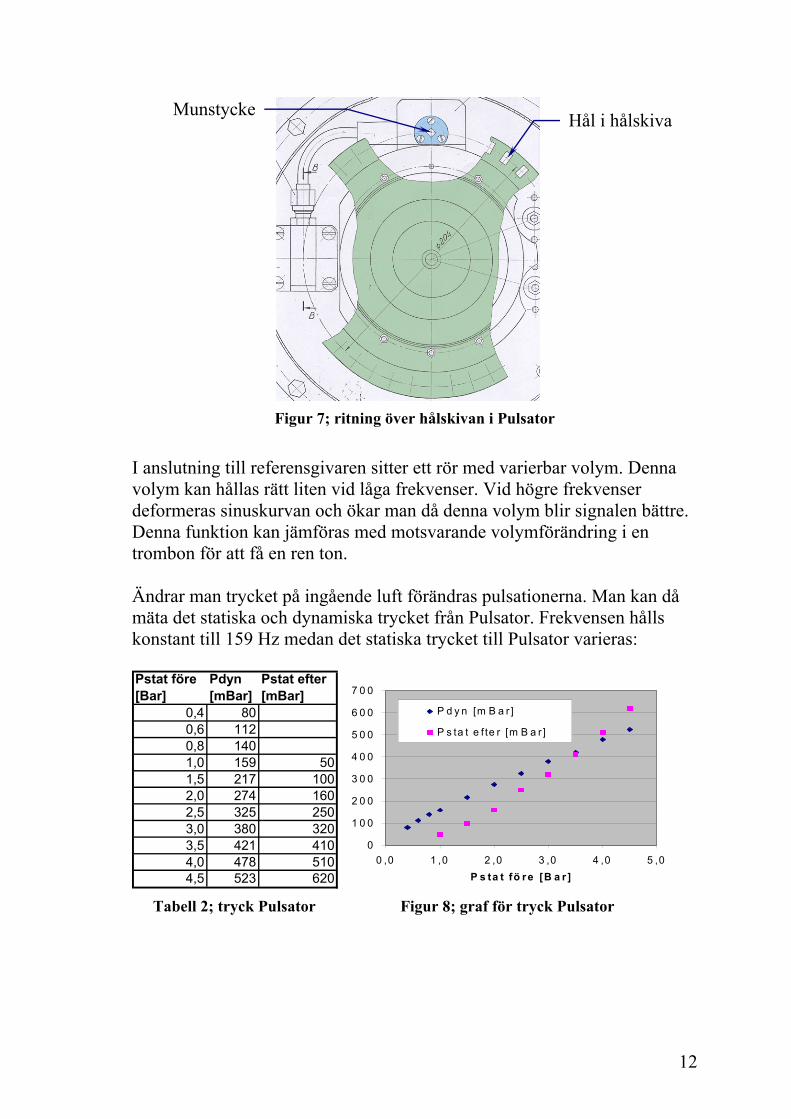
Figur 7; ritning över hålskivan i Pulsator
I anslutning till referensgivaren sitter ett rör med varierbar volym. Denna volym kan hållas rätt liten vid låga frekvenser. Vid högre frekvenser deformeras sinuskurvan och ökar man då denna volym blir signalen bättre. Denna funktion kan jämföras med motsvarande volymförändring i en trombon för att få en ren ton. Ändrar man trycket på ingående luft förändras pulsationerna. Man kan då mäta det statiska och dynamiska trycket från Pulsator. Frekvensen hålls konstant till 159 Hz medan det statiska trycket till Pulsator varieras: Pstat före [Bar]
Pdyn [mBar]
Pstat efter [mBar]
0,4 800,6 1120,8 1401,0 159 501,5 217 1002,0 274 1602,5 325 2503,0 380 3203,5 421 4104,0 478 5104,5 523 620
0
1 0 0
2 0 0
3 0 0
4 0 0
5 0 0
6 0 0
7 0 0
0 ,0 1 ,0 2 ,0 3 ,0 4 ,0 5 ,0P s ta t fö r e [B a r ]
P d y n [m B a r ]
P s ta t e f te r [m B a r ]
Tabell 2; tryck Pulsator Figur 8; graf för tryck Pulsator
Munstycke Hål i hålskiva
13
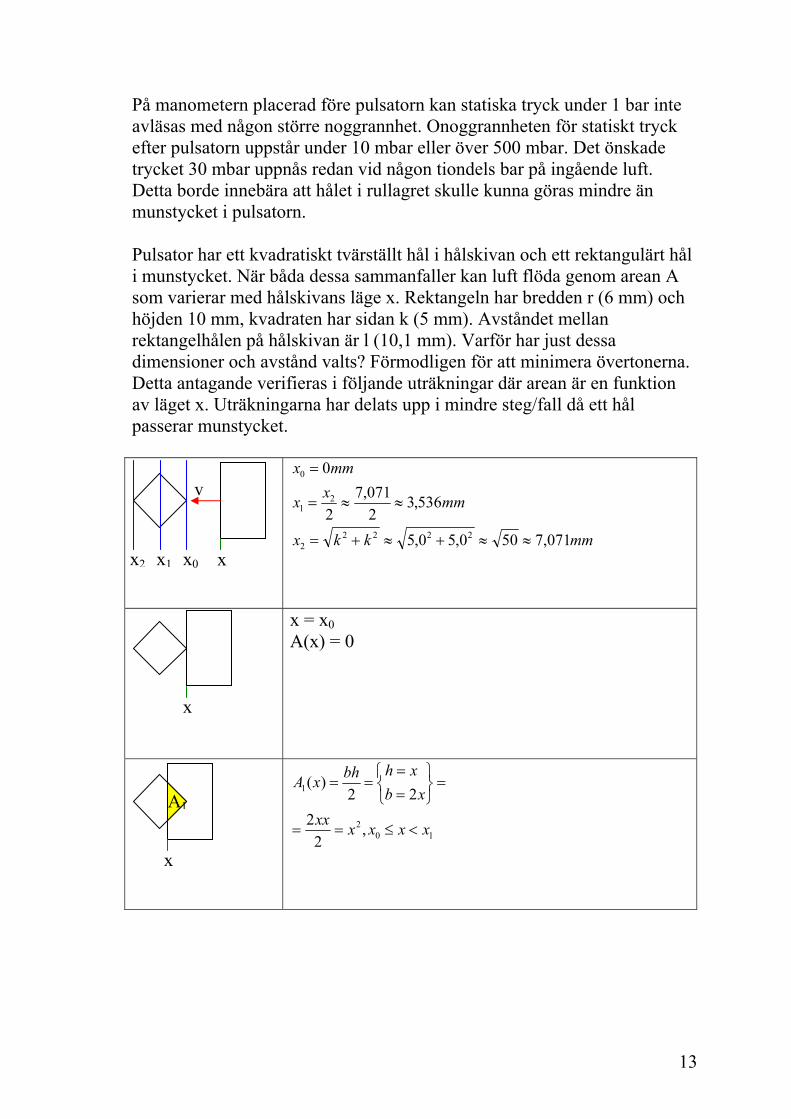
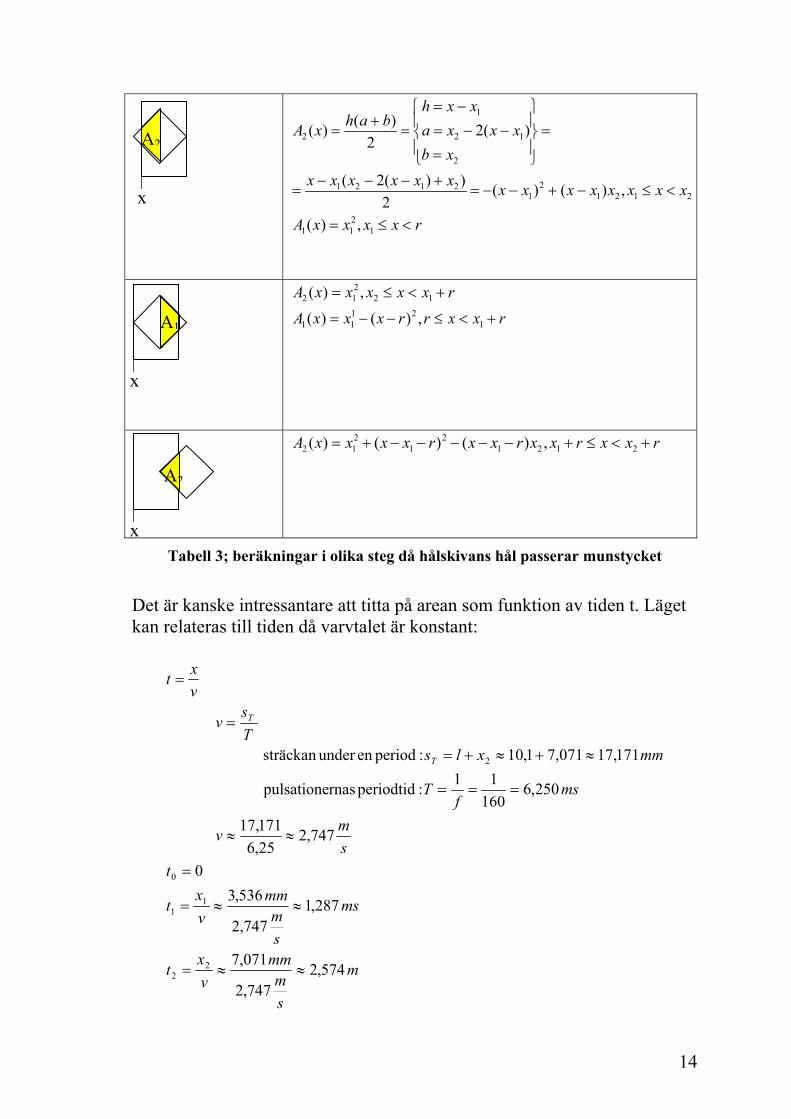
På manometern placerad före pulsatorn kan statiska tryck under 1 bar inte avläsas med någon större noggrannhet. Onoggrannheten för statiskt tryck efter pulsatorn uppstår under 10 mbar eller över 500 mbar. Det önskade trycket 30 mbar uppnås redan vid någon tiondels bar på ingående luft. Detta borde innebära att hålet i rullagret skulle kunna göras mindre än munstycket i pulsatorn. Pulsator har ett kvadratiskt tvärställt hål i hålskivan och ett rektangulärt hål i munstycket. När båda dessa sammanfaller kan luft flöda genom arean A som varierar med hålskivans läge x. Rektangeln har bredden r (6 mm) och höjden 10 mm, kvadraten har sidan k (5 mm). Avståndet mellan rektangelhålen på hålskivan är l (10,1 mm). Varför har just dessa dimensioner och avstånd valts? Förmodligen för att minimera övertonerna. Detta antagande verifieras i följande uträkningar där arean är en funktion av läget x. Uträkningarna har delats upp i mindre steg/fall då ett hål passerar munstycket.
mmkkx
mmxx
mmx
071,7500,50,5
536,32071,7
2
0
22222
21
0
≈≈+≈+=
≈≈=
=
x = x0 A(x) = 0
102
1
,2
222
)(
xxxxxxxb
xhbhxA
<≤==
=
==
==
v
x0 x x1x2
x
x
A1
14
rxxxxA
xxxxxxxxxxxxxxxb
xxxaxxh
bahxA
<≤=
<≤−+−−=+−−−
=
=
=−−=
−==
+=
1211
21212
12121
2
12
1
2
,)(
,)()(2
))(2(
)(22
)()(
rxxrrxxxA
rxxxxxA
+<≤−−=
+<≤=
121
11
12212
,)()(
,)(
rxxrxxrxxrxxxxA +<≤+−−−−−+= 21212
1212 ,)()()(
Tabell 3; beräkningar i olika steg då hålskivans hål passerar munstycket
Det är kanske intressantare att titta på arean som funktion av tiden t. Läget kan relateras till tiden då varvtalet är konstant:
m
sm
mmvxt
ms
sm
mmvxt
tsmv
msf
T
mmxlsTs
v
vxt
T
T
574,2747,2
071,7
287,1747,2
536,30
747,225,6171,17
250,6160
11:periodtidrnaspulsatione
171,17071,71,10:periodenundersträckan
22
11
0
2
≈≈=
≈≈=
=
≈≈
===
≈+≈+=
=
=
x
A2
x
A1
x
A2
15
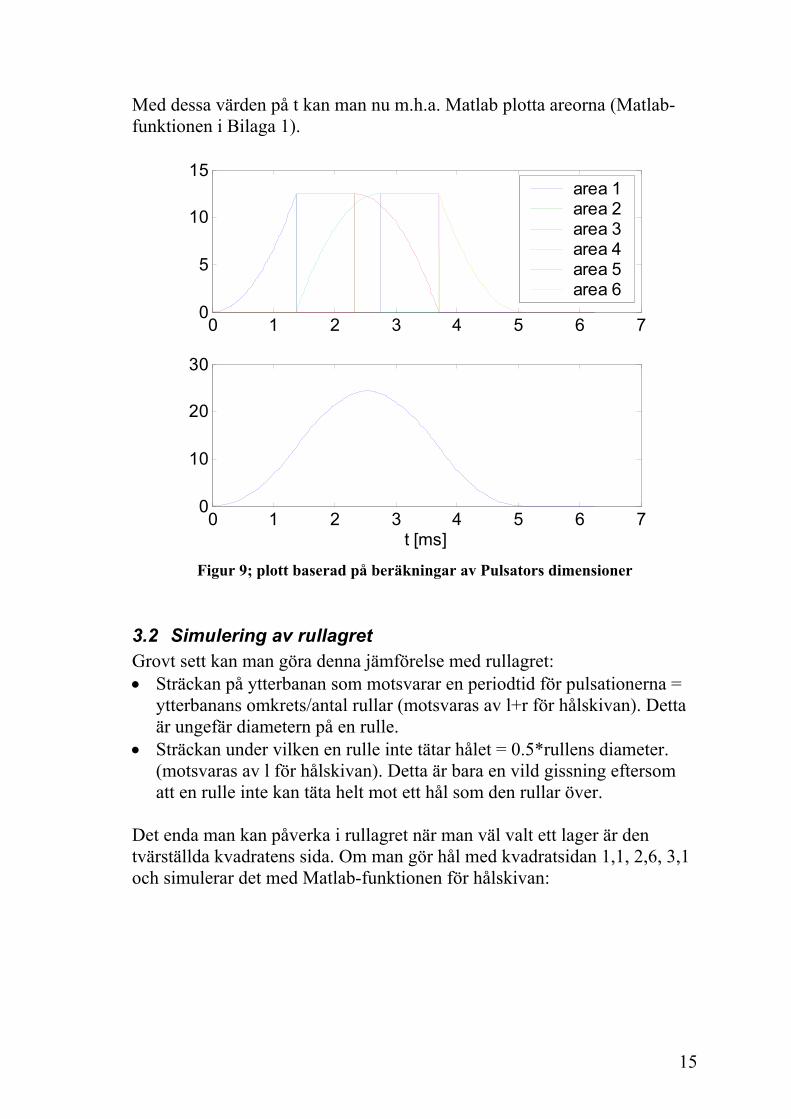
Med dessa värden på t kan man nu m.h.a. Matlab plotta areorna (Matlab-funktionen i Bilaga 1).
0 1 2 3 4 5 6 70
5
10
15area 1area 2area 3area 4area 5area 6
0 1 2 3 4 5 6 70
10
20
30
t [ms] Figur 9; plott baserad på beräkningar av Pulsators dimensioner
3.2 Simulering av rullagret Grovt sett kan man göra denna jämförelse med rullagret: • Sträckan på ytterbanan som motsvarar en periodtid för pulsationerna =
ytterbanans omkrets/antal rullar (motsvaras av l+r för hålskivan). Detta är ungefär diametern på en rulle.
• Sträckan under vilken en rulle inte tätar hålet = 0.5*rullens diameter. (motsvaras av l för hålskivan). Detta är bara en vild gissning eftersom att en rulle inte kan täta helt mot ett hål som den rullar över.
Det enda man kan påverka i rullagret när man väl valt ett lager är den tvärställda kvadratens sida. Om man gör hål med kvadratsidan 1,1, 2,6, 3,1 och simulerar det med Matlab-funktionen för hålskivan:
16
0 2 4 6 80
0.2
0.4
0.6
0.8
1
1.2
1.4
t [ms]
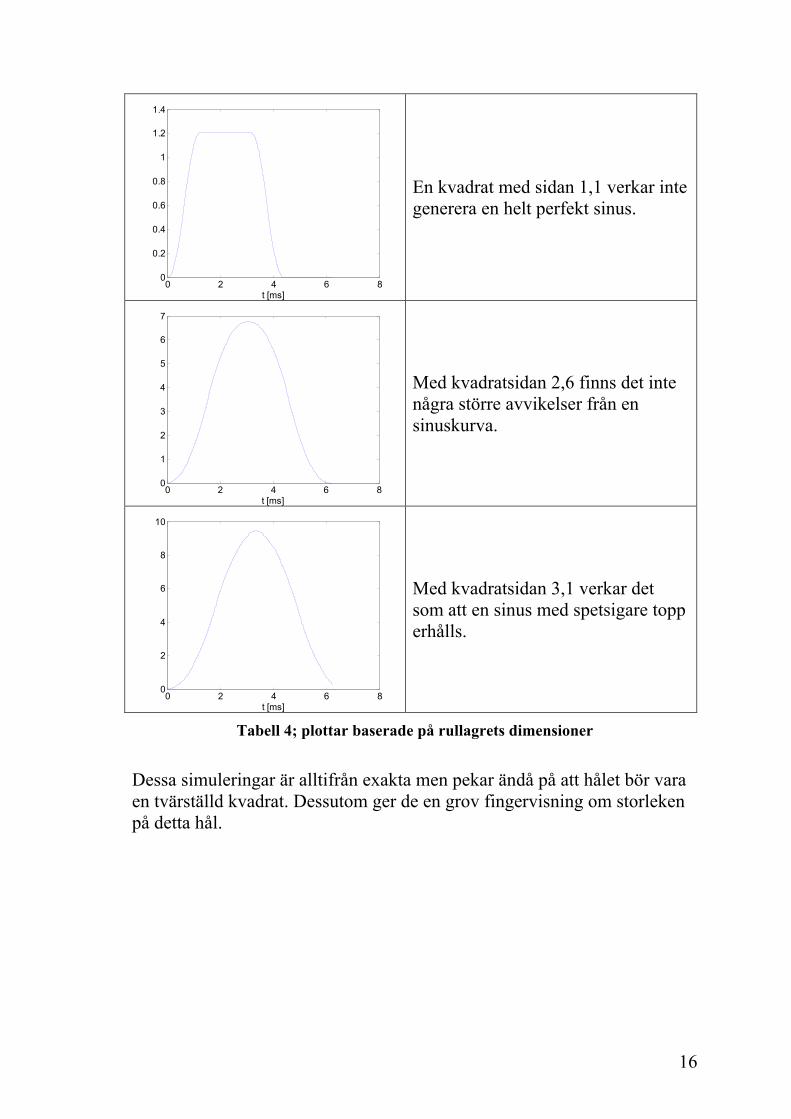
En kvadrat med sidan 1,1 verkar inte generera en helt perfekt sinus.
0 2 4 6 80
1
2
3
4
5
6
7
t [ms]
Med kvadratsidan 2,6 finns det inte några större avvikelser från en sinuskurva.
0 2 4 6 80
2
4
6
8
10
t [ms]
Med kvadratsidan 3,1 verkar det som att en sinus med spetsigare topp erhålls.
Tabell 4; plottar baserade på rullagrets dimensioner
Dessa simuleringar är alltifrån exakta men pekar ändå på att hålet bör vara en tvärställd kvadrat. Dessutom ger de en grov fingervisning om storleken på detta hål.
17
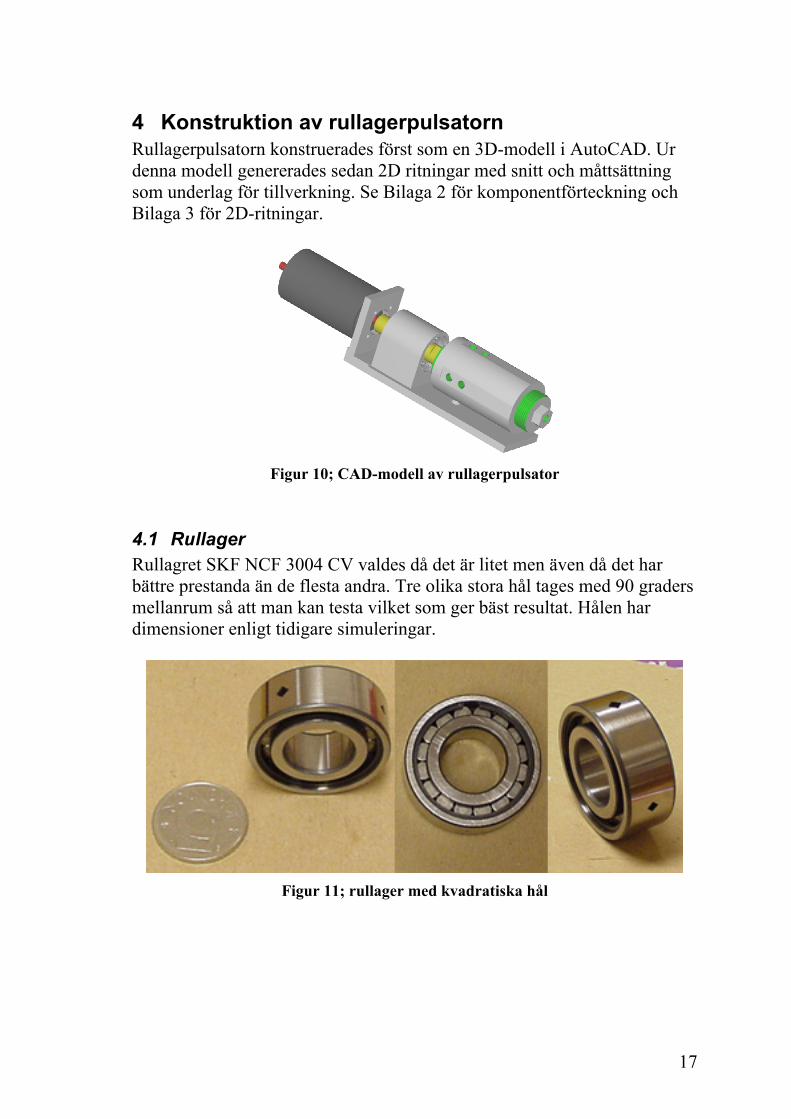
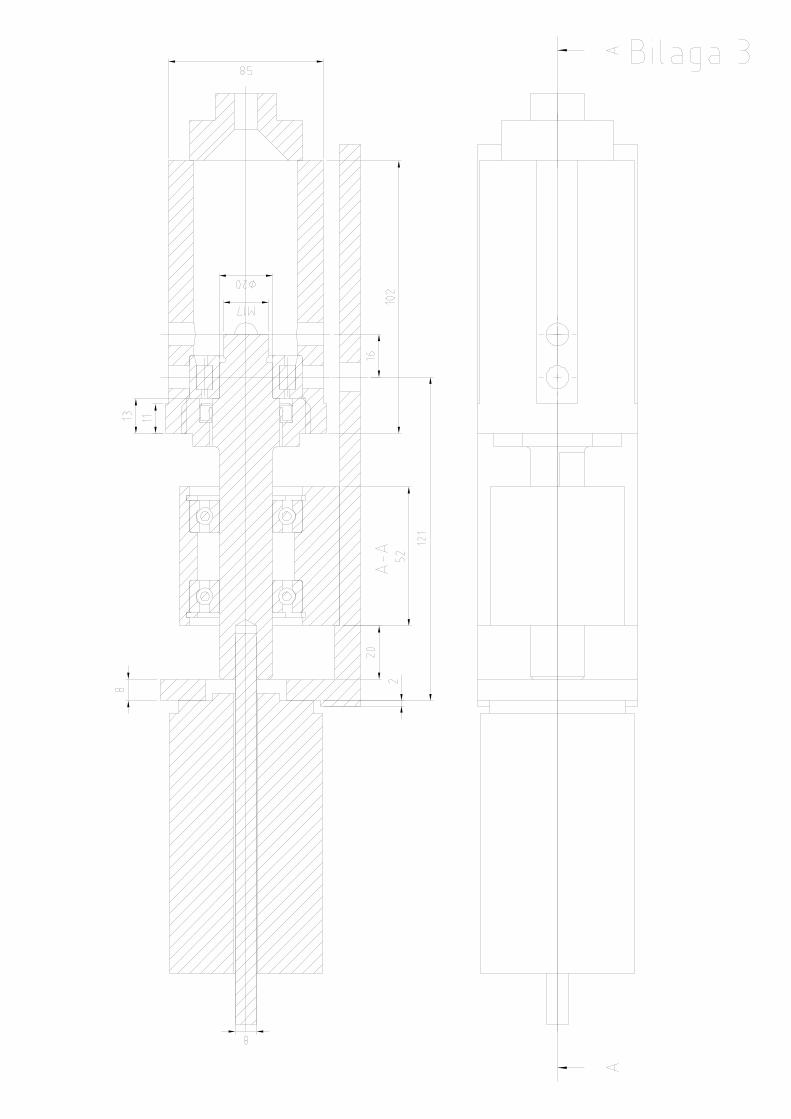
4 Konstruktion av rullagerpulsatorn Rullagerpulsatorn konstruerades först som en 3D-modell i AutoCAD. Ur denna modell genererades sedan 2D ritningar med snitt och måttsättning som underlag för tillverkning. Se Bilaga 2 för komponentförteckning och Bilaga 3 för 2D-ritningar.
Figur 10; CAD-modell av rullagerpulsator
4.1 Rullager Rullagret SKF NCF 3004 CV valdes då det är litet men även då det har bättre prestanda än de flesta andra. Tre olika stora hål tages med 90 graders mellanrum så att man kan testa vilket som ger bäst resultat. Hålen har dimensioner enligt tidigare simuleringar.
Figur 11; rullager med kvadratiska hål
18
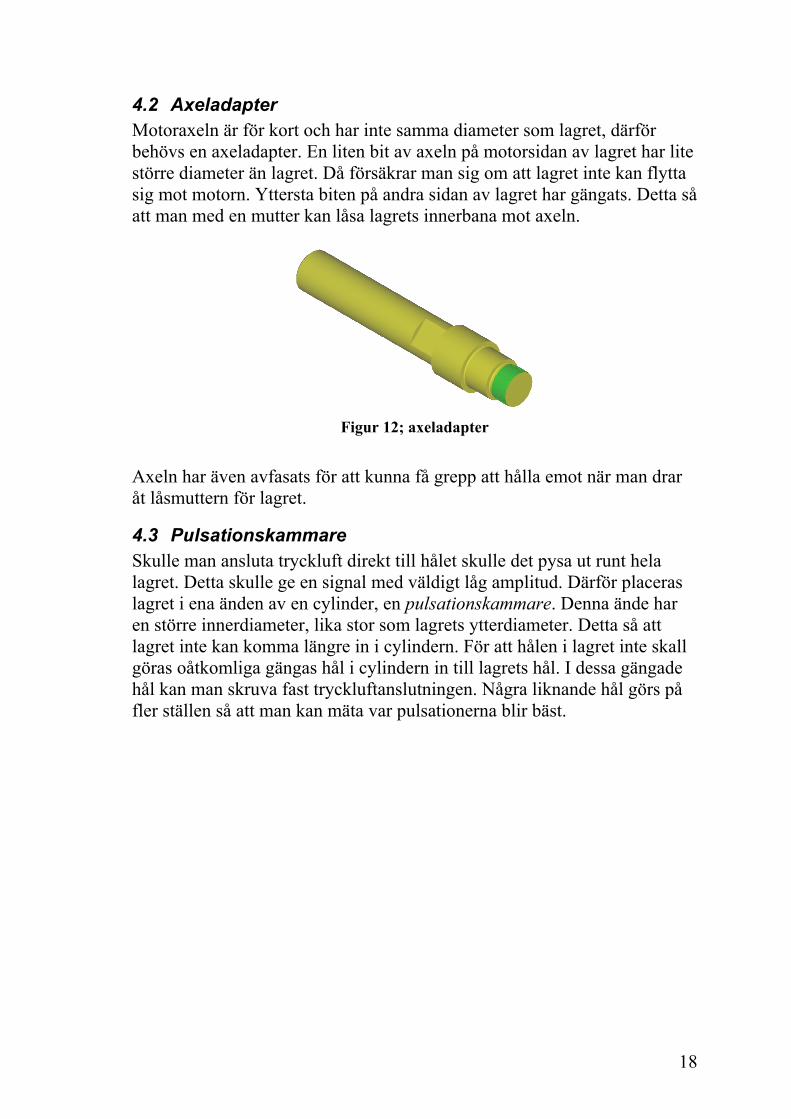
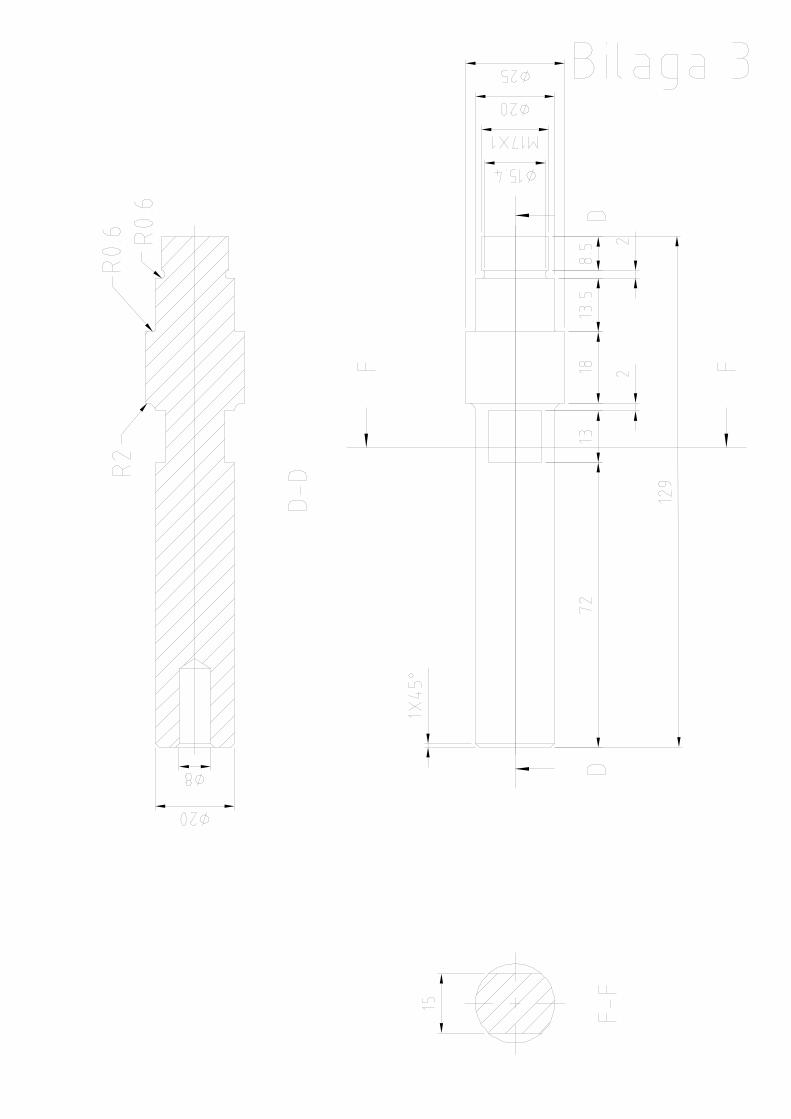
4.2 Axeladapter Motoraxeln är för kort och har inte samma diameter som lagret, därför behövs en axeladapter. En liten bit av axeln på motorsidan av lagret har lite större diameter än lagret. Då försäkrar man sig om att lagret inte kan flytta sig mot motorn. Yttersta biten på andra sidan av lagret har gängats. Detta så att man med en mutter kan låsa lagrets innerbana mot axeln.
Figur 12; axeladapter
Axeln har även avfasats för att kunna få grepp att hålla emot när man drar åt låsmuttern för lagret.
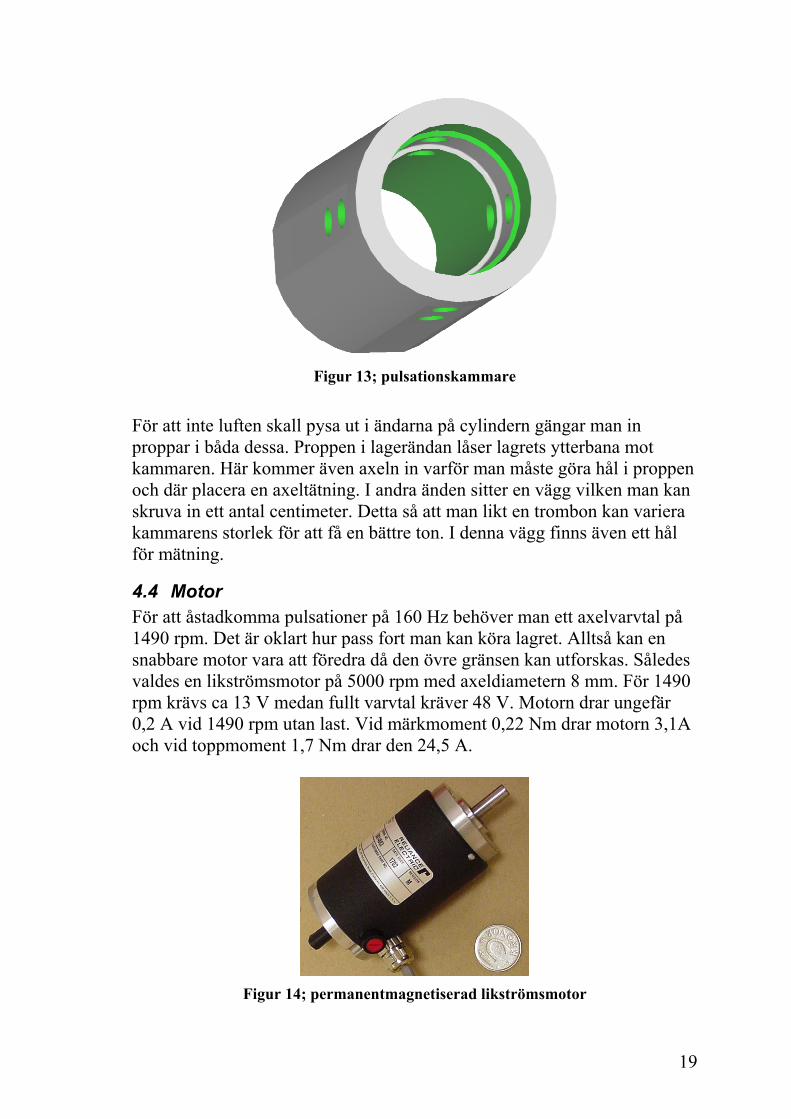
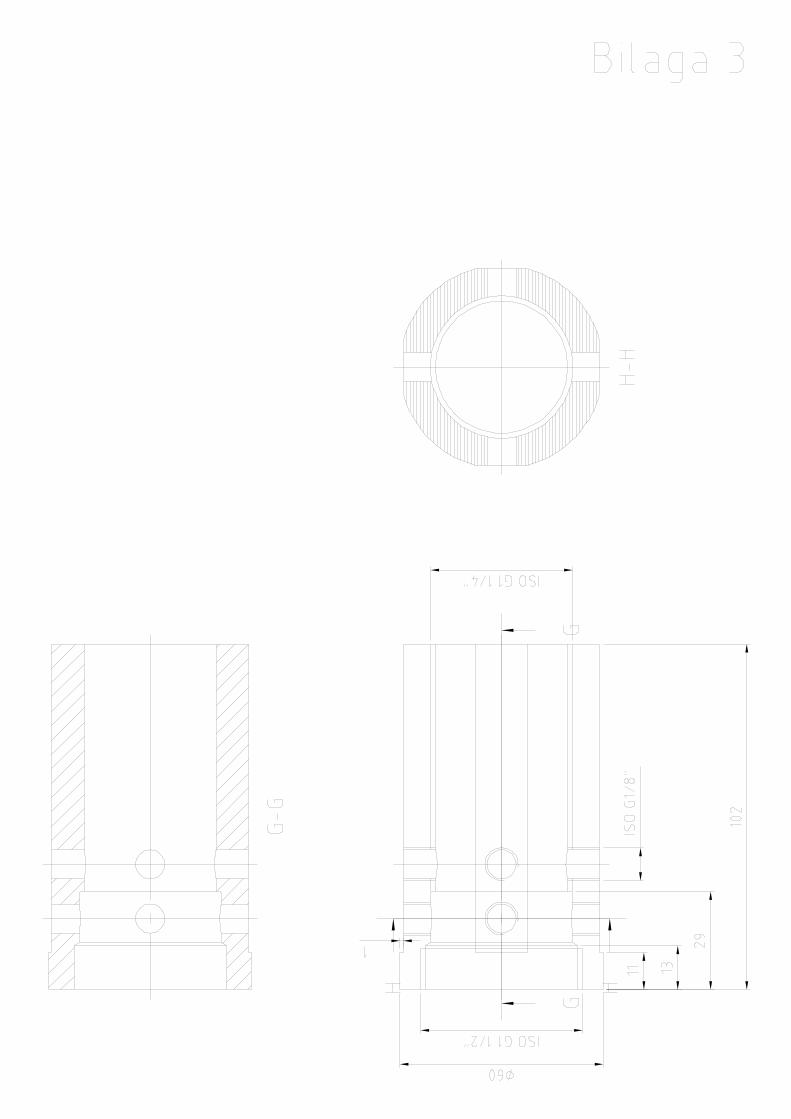
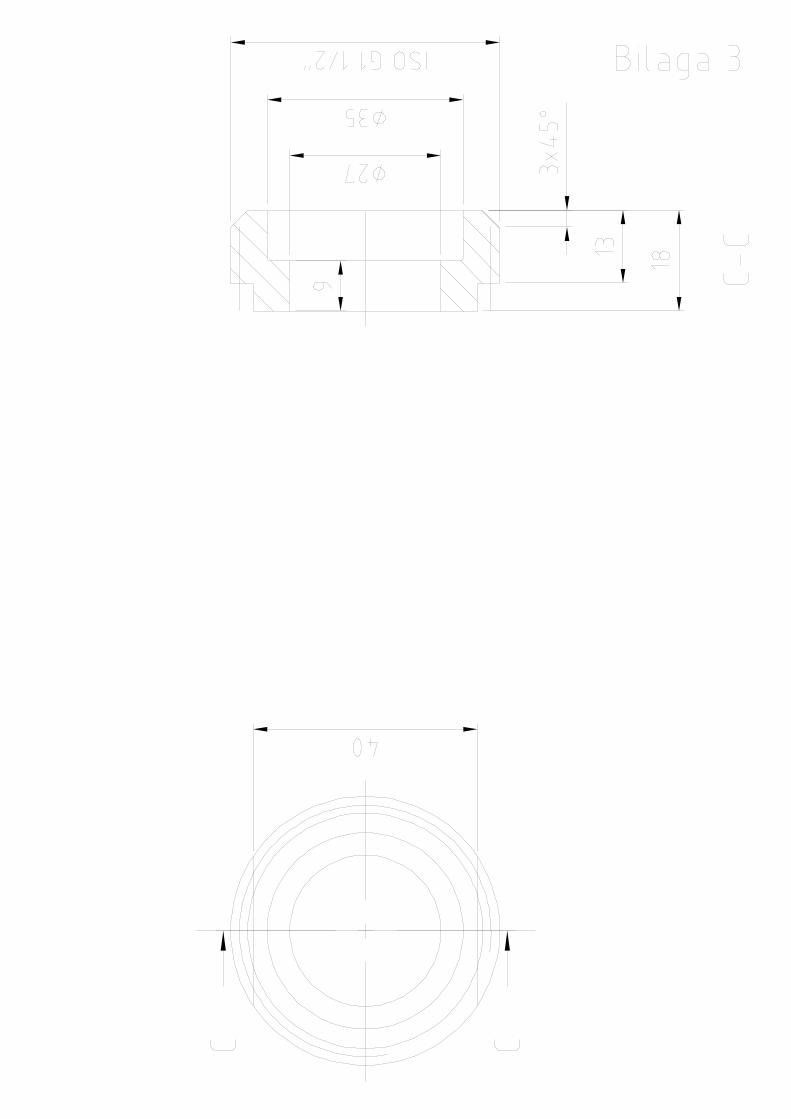
4.3 Pulsationskammare Skulle man ansluta tryckluft direkt till hålet skulle det pysa ut runt hela lagret. Detta skulle ge en signal med väldigt låg amplitud. Därför placeras lagret i ena änden av en cylinder, en pulsationskammare. Denna ände har en större innerdiameter, lika stor som lagrets ytterdiameter. Detta så att lagret inte kan komma längre in i cylindern. För att hålen i lagret inte skall göras oåtkomliga gängas hål i cylindern in till lagrets hål. I dessa gängade hål kan man skruva fast tryckluftanslutningen. Några liknande hål görs på fler ställen så att man kan mäta var pulsationerna blir bäst.
19
Figur 13; pulsationskammare
För att inte luften skall pysa ut i ändarna på cylindern gängar man in proppar i båda dessa. Proppen i lagerändan låser lagrets ytterbana mot kammaren. Här kommer även axeln in varför man måste göra hål i proppen och där placera en axeltätning. I andra änden sitter en vägg vilken man kan skruva in ett antal centimeter. Detta så att man likt en trombon kan variera kammarens storlek för att få en bättre ton. I denna vägg finns även ett hål för mätning.
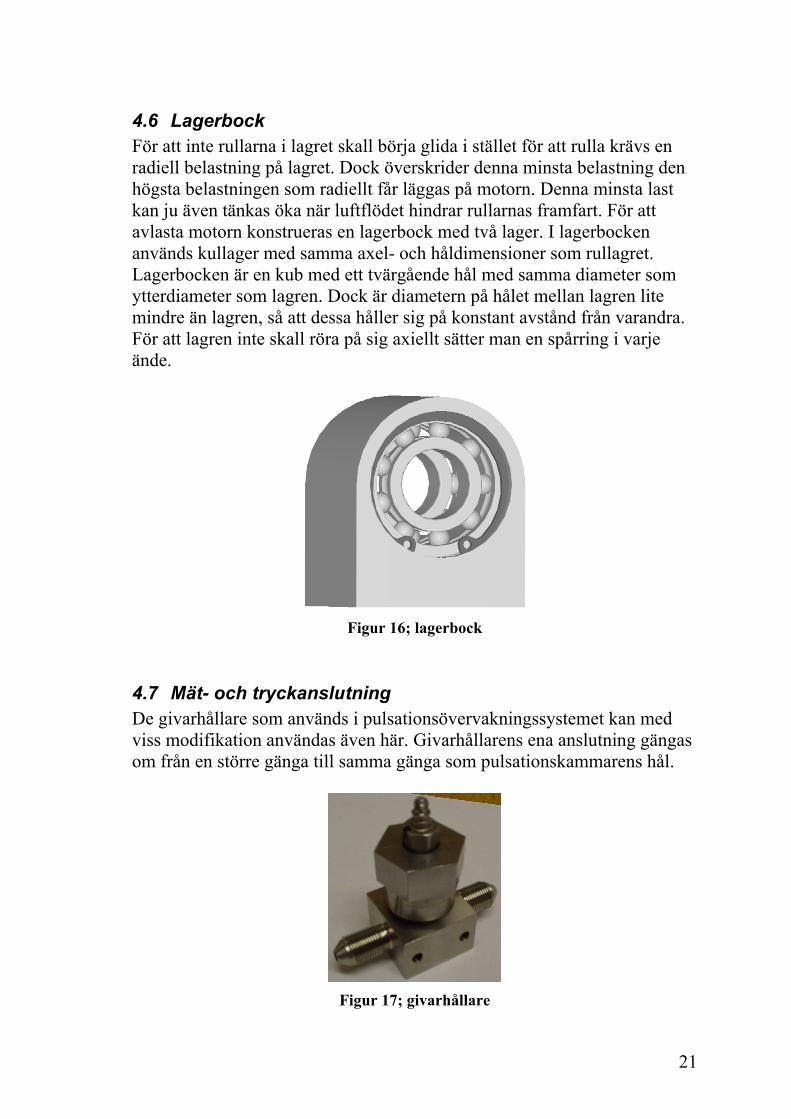
4.4 Motor För att åstadkomma pulsationer på 160 Hz behöver man ett axelvarvtal på 1490 rpm. Det är oklart hur pass fort man kan köra lagret. Alltså kan en snabbare motor vara att föredra då den övre gränsen kan utforskas. Således valdes en likströmsmotor på 5000 rpm med axeldiametern 8 mm. För 1490 rpm krävs ca 13 V medan fullt varvtal kräver 48 V. Motorn drar ungefär 0,2 A vid 1490 rpm utan last. Vid märkmoment 0,22 Nm drar motorn 3,1A och vid toppmoment 1,7 Nm drar den 24,5 A.
Figur 14; permanentmagnetiserad likströmsmotor
20
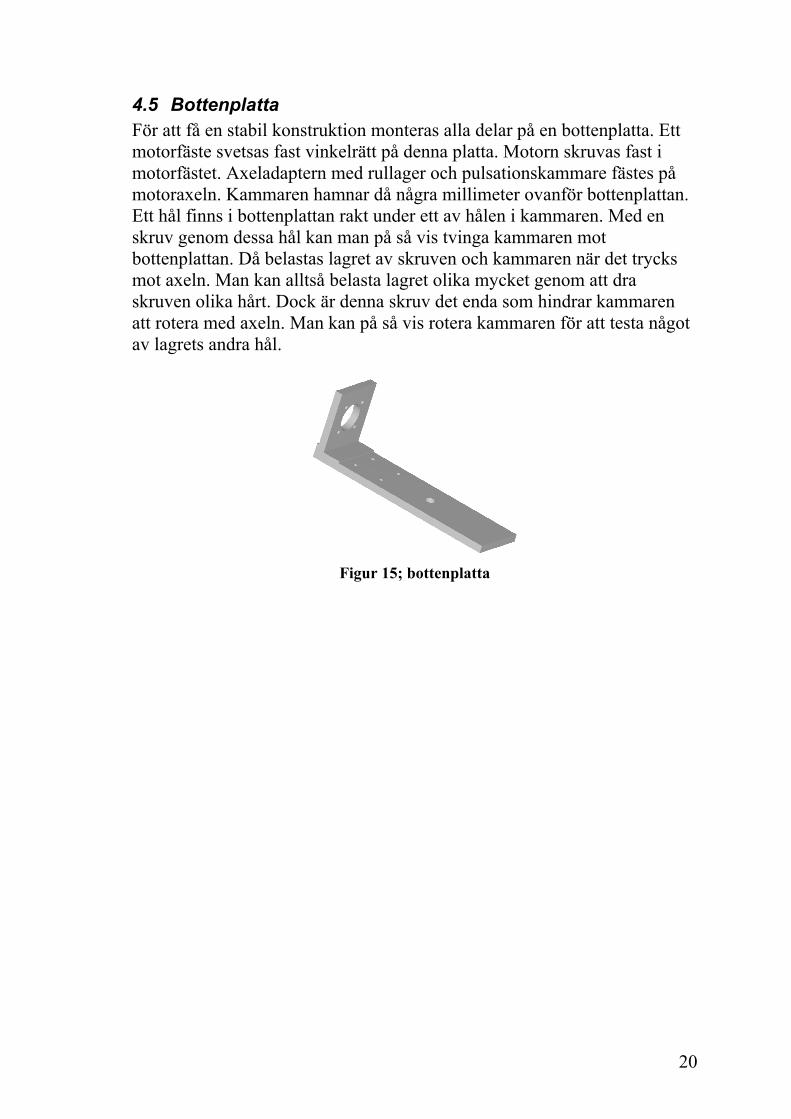
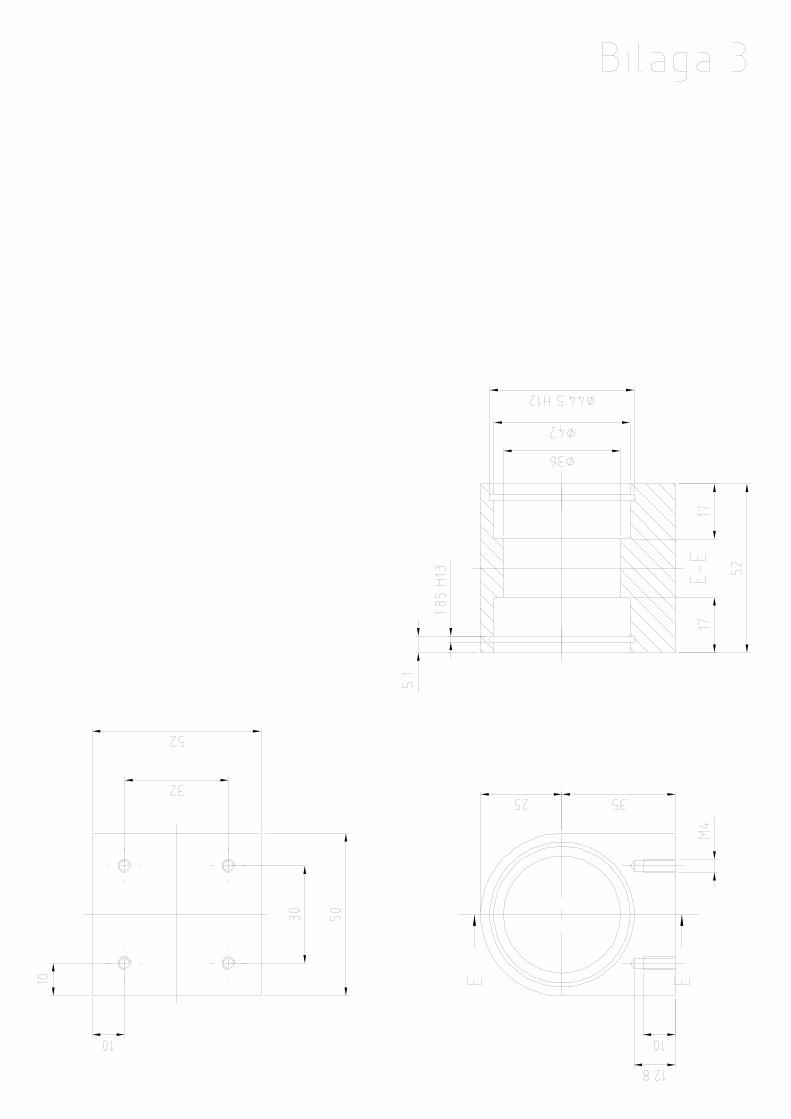
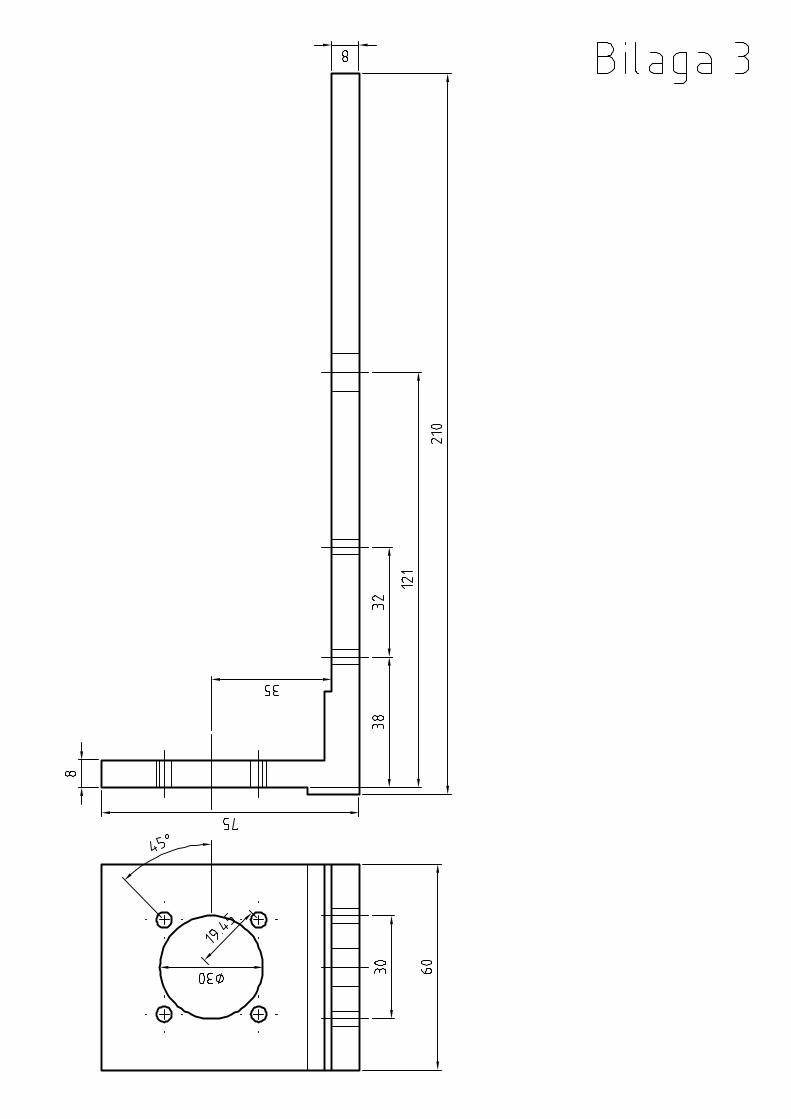
4.5 Bottenplatta För att få en stabil konstruktion monteras alla delar på en bottenplatta. Ett motorfäste svetsas fast vinkelrätt på denna platta. Motorn skruvas fast i motorfästet. Axeladaptern med rullager och pulsationskammare fästes på motoraxeln. Kammaren hamnar då några millimeter ovanför bottenplattan. Ett hål finns i bottenplattan rakt under ett av hålen i kammaren. Med en skruv genom dessa hål kan man på så vis tvinga kammaren mot bottenplattan. Då belastas lagret av skruven och kammaren när det trycks mot axeln. Man kan alltså belasta lagret olika mycket genom att dra skruven olika hårt. Dock är denna skruv det enda som hindrar kammaren att rotera med axeln. Man kan på så vis rotera kammaren för att testa något av lagrets andra hål.
Figur 15; bottenplatta
21
4.6 Lagerbock För att inte rullarna i lagret skall börja glida i stället för att rulla krävs en radiell belastning på lagret. Dock överskrider denna minsta belastning den högsta belastningen som radiellt får läggas på motorn. Denna minsta last kan ju även tänkas öka när luftflödet hindrar rullarnas framfart. För att avlasta motorn konstrueras en lagerbock med två lager. I lagerbocken används kullager med samma axel- och håldimensioner som rullagret. Lagerbocken är en kub med ett tvärgående hål med samma diameter som ytterdiameter som lagren. Dock är diametern på hålet mellan lagren lite mindre än lagren, så att dessa håller sig på konstant avstånd från varandra. För att lagren inte skall röra på sig axiellt sätter man en spårring i varje ände.
Figur 16; lagerbock
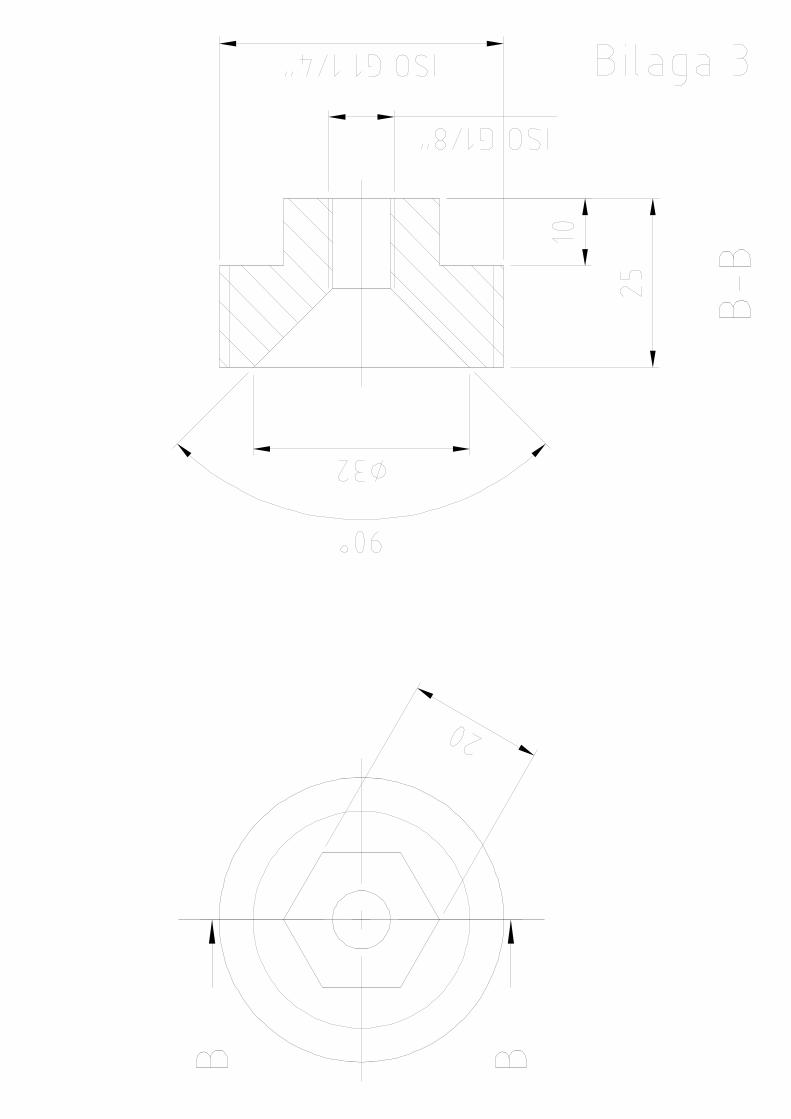
4.7 Mät- och tryckanslutning De givarhållare som används i pulsationsövervakningssystemet kan med viss modifikation användas även här. Givarhållarens ena anslutning gängas om från en större gänga till samma gänga som pulsationskammarens hål.
Figur 17; givarhållare
22
5 Test av rullagerpulsatorn Från början var en av tankarna att pulsationskammaren skulle kunna ”hyfsa till” pulsationerna om det var mycket övertoner. Tanken var också att man skulle mäta pulsationerna i änden av denna kammare. Det första testet var dock att mäta pulsationer på tilluften, de visade sig vara sinusformade med mycket små övertoner. Konstruktionen var emellertid inte perfekt. Axeln var för lång och därför snedbelastades lagret, vilket medförde ett onödigt högt strömuttag. Detta åtgärdades och nästa problem uppstod. Axelns och lagerbockens centrumlinjer sammanföll inte tillräckligt. Detta gestaltades i att axeladaptern och motoraxeln inte kunde monteras på varandra utan att använda stora krafter. Problemet visar sig även om man skruvar på skruvarna som förbinder bottenplattan med lagerbocken. Drar man åt skruvarna drar motorn mer ström. Dessa problem är dock inget hinder utan bara något som bör tänkas på vid vidareutveckling. En mycket positiv sak är att man skulle kunna bortrationalisera i stort sett hela pulsationskammaren eftersom man mäter på tilluften. Det enda som behövs är cylindern runt lagret så man kan belasta och tillföra tryckluft. Med en sådan konstruktion skulle man kunna spara på både vikt och utrymme. Axeltätningen i proppen har ganska hög friktion. Slipper man denna minskar strömbehovet, vilket är en fördel. Ställskruven för belastningen av lagret gör stor nytta. Om den bara är löst åtdragen erhålls en väldigt låg frekvens på pulsationerna. Drar man åt den lite hårdare kommer man upp i rätt frekvens och vibrationerna minskar. Dock ökar strömåtgången när belastningen ökar. Så det gäller att hitta en ”lagom” belastning.
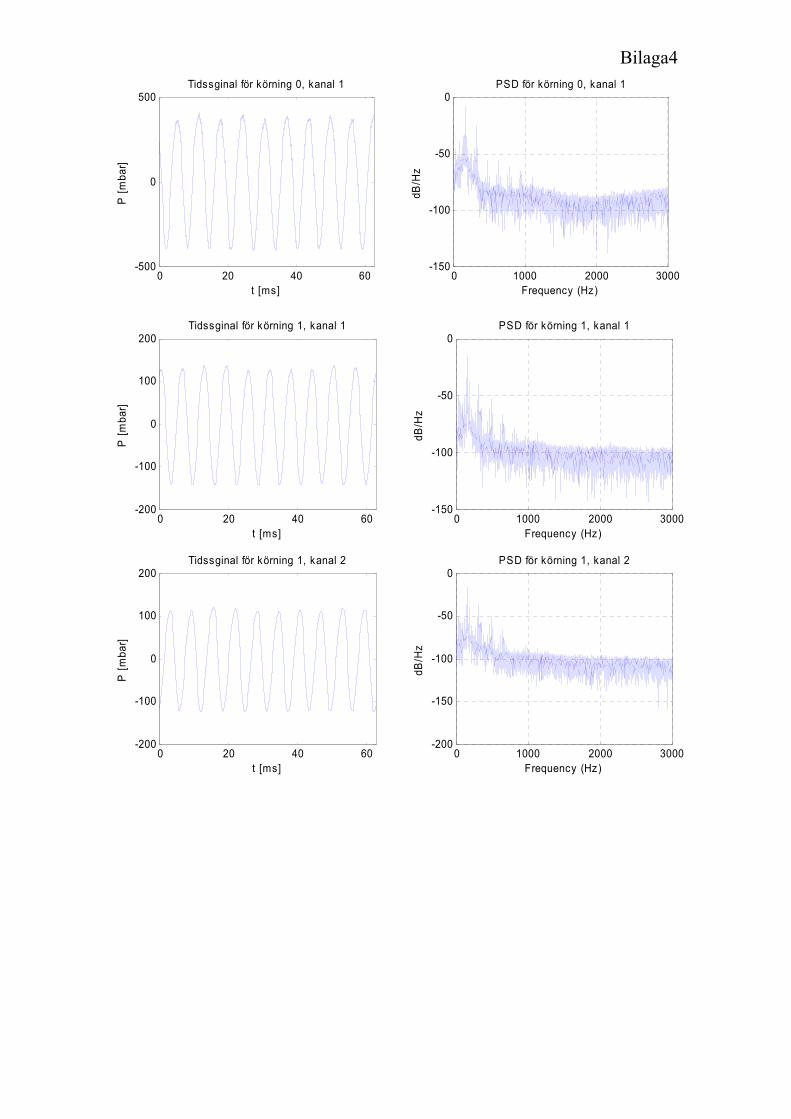
5.1 Mätdatainsamling Några olika tester gjordes där signalerna spelades in på en DAT-bandspelare. Informationen fördes över till en dator och analyserades med Matlab. Mätprotokoll och tillhörande grafer finns i Bilaga 4. Matlab-funktioner som behandlar rådata, plottar tidssignalen och beräknar frekvensinnehåll återfinns i Bilaga 5. Om givarhållaren monteras direkt på tilluften erhålls följande:
23
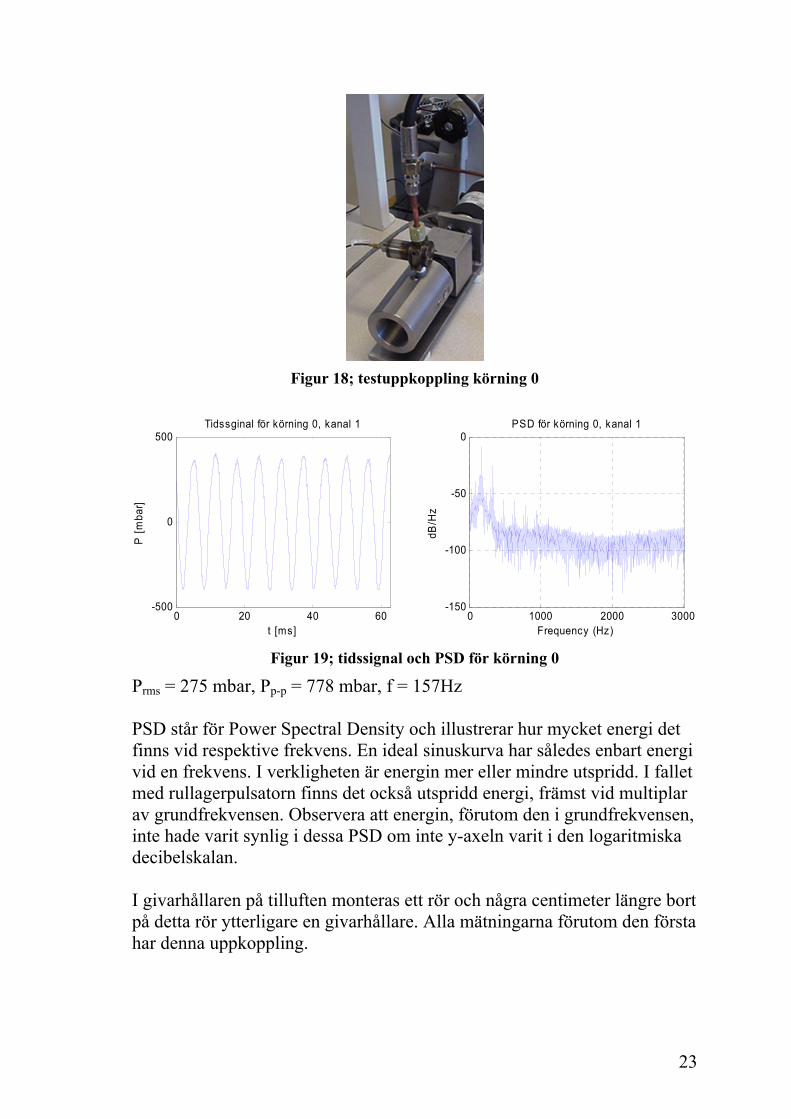
Figur 18; testuppkoppling körning 0
0 20 40 60-500
0
500Tidssginal för körning 0, kanal 1
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
zPSD för körning 0, kanal 1
Figur 19; tidssignal och PSD för körning 0
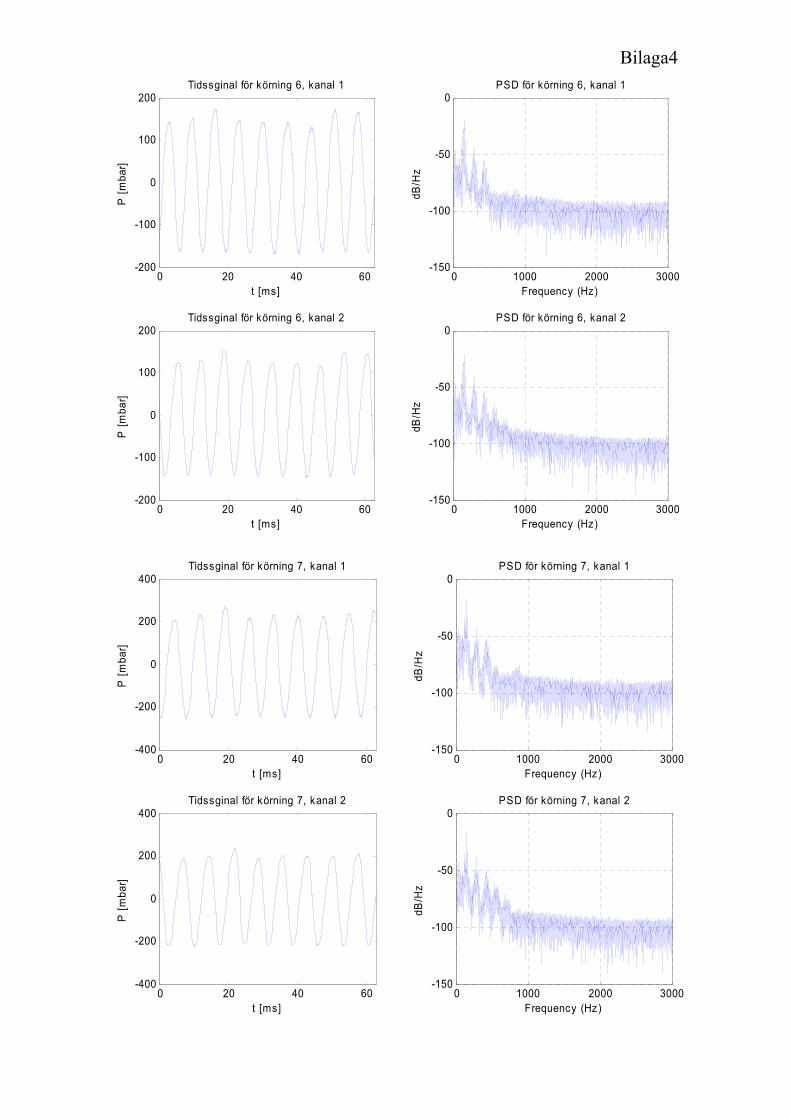
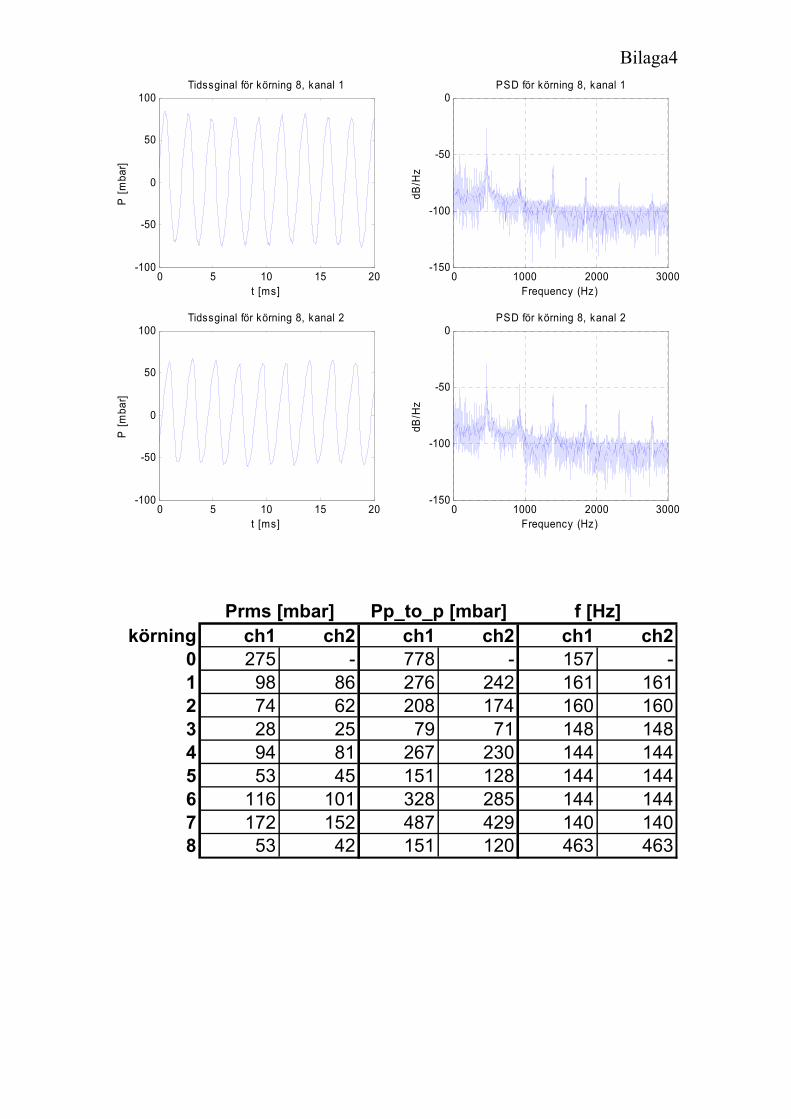
Prms = 275 mbar, Pp-p = 778 mbar, f = 157Hz PSD står för Power Spectral Density och illustrerar hur mycket energi det finns vid respektive frekvens. En ideal sinuskurva har således enbart energi vid en frekvens. I verkligheten är energin mer eller mindre utspridd. I fallet med rullagerpulsatorn finns det också utspridd energi, främst vid multiplar av grundfrekvensen. Observera att energin, förutom den i grundfrekvensen, inte hade varit synlig i dessa PSD om inte y-axeln varit i den logaritmiska decibelskalan. I givarhållaren på tilluften monteras ett rör och några centimeter längre bort på detta rör ytterligare en givarhållare. Alla mätningarna förutom den första har denna uppkoppling.
24
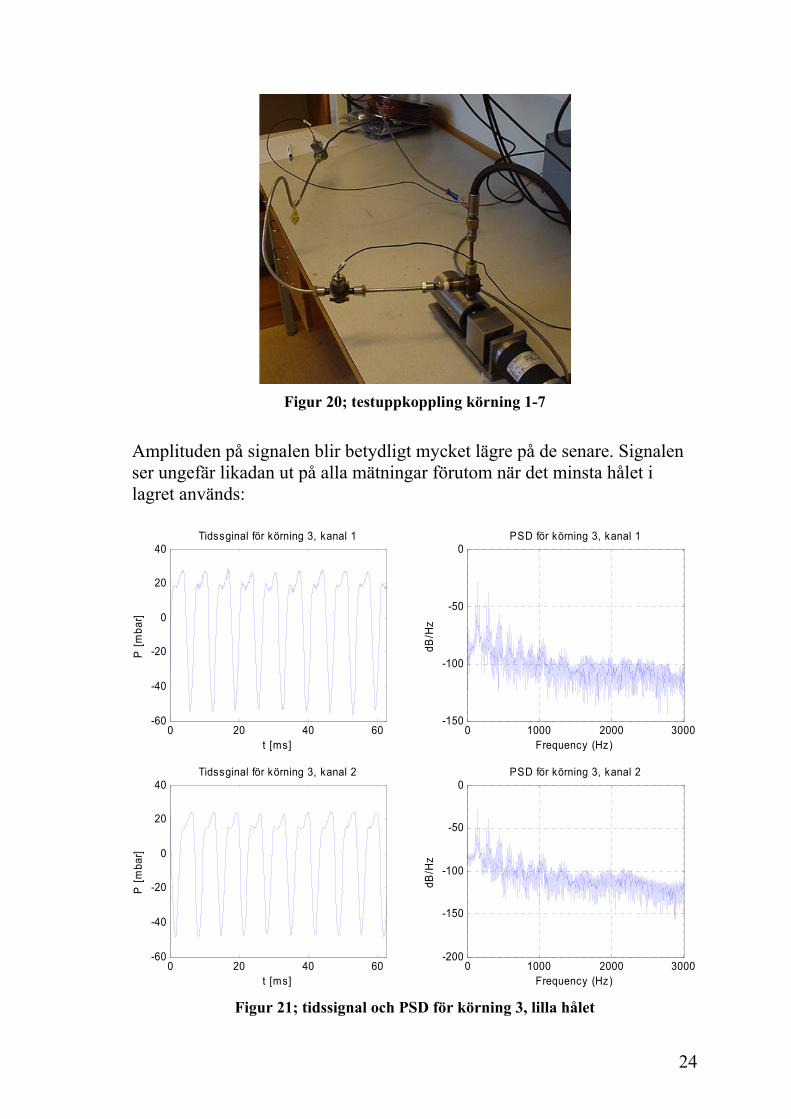
Figur 20; testuppkoppling körning 1-7
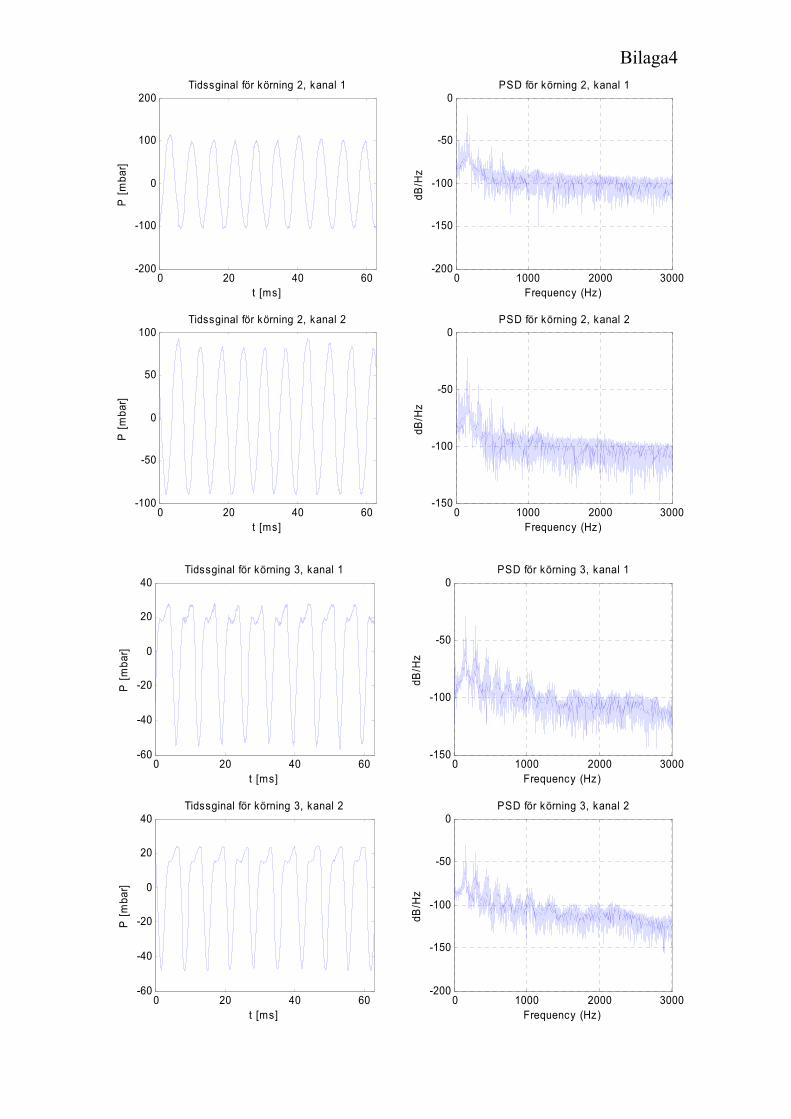
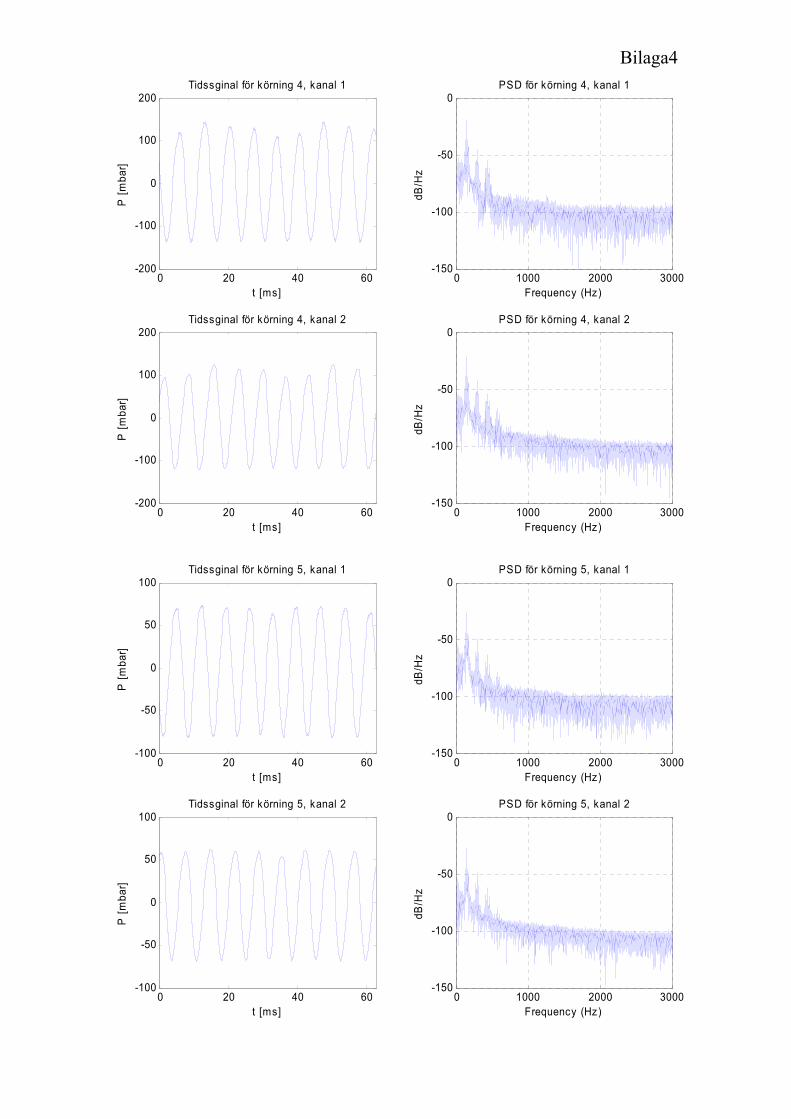
Amplituden på signalen blir betydligt mycket lägre på de senare. Signalen ser ungefär likadan ut på alla mätningar förutom när det minsta hålet i lagret används:
0 20 40 60-60
-40
-20
0
20
40Tidssginal för körning 3, kanal 1
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 3, kanal 1
0 20 40 60-60
-40
-20
0
20
40Tidssginal för körning 3, kanal 2
t [ms]
P [m
bar]
0 1000 2000 3000-200
-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 3, kanal 2
Figur 21; tidssignal och PSD för körning 3, lilla hålet

25
På vissa gasturbiner sitter det en propp i slutet av dämprullen medan det går ett flöde genom hela systemet på andra installationer. Därför gjordes även ett test med denna plugg avlägsnad, amplituden sjönk då en aning.
26
6 Resultat Efter litteratursökning visade det sig att generering av pulsationer inte är vanligt förekommande. Det var enklare att hitta exempel på hur man dämpar dessa. De olika alternativ som togs fram är baserade på modifiering av befintliga produkter och/eller koncept. Dessa har från början inget med pulsationer att göra. Slutligen valdes modifiering av ett rullager som pulsationsgenerator. En analys av det befintliga kalibreringssystemet för vågledare och givare gjordes. Denna resulterade i uträkningar som även kunde användas på rullagret. När mätningar gjordes på den färdiga rullagerpulsatorn visade sig dessa stämma ganska bra. En sinuspulsation med få övertoner var gemensamt för både beräkningar och mätningar. Rullagerpulsatorn klarar av att generera pulsationer med både högre amplitud och frekvens än kravspecifikationen. Peak-to-peak värdet uppgick som mest till någon bar och frekvensen till 450 Hz. Begränsningen i det här fallet var inte själva rullagret utan motorn och tryckluften. Högre amplituder skulle möjligen kunna genereras vid användande av en starkare motor och högre tryck på tilluft. Högre frekvenser skulle möjligen också kunna uppnås om en snabbare motor används. Det finns motorer med varvtal på 200 000 rpm och luftförstärkare som förstärker tryckluft upp till 10-tals bar. Men någonstans går ju även gränsen för vad rullagret klarar av. Konstruktionen av rullagerpulsatorn blev bra. Dock borde man vid förfining av denna idé ställa sig frågan om pulsationskammaren verkligen behövs. Dessutom måste man lägga stor vikt vid att motoraxelns och axeladapterns centrumlinjer sammanfaller med stor noggrannhet. Om rullagerpulsatorn skall tas i bruk borde man kapsla in den så att inte smuts och damm tar sig in i lagren.
27
7 Referenser Merkel, Magnus (1999), Tekniska rapporter och examensarbeten, Linköpings Universitet Motorer Växlar Servo Positionering (2002), Produktkatalog och teknisk information, Östergrens Elmotor AB Björk m.fl. (1995), Nya formelsamlingen, Stockholm, Natur Och Kultur, ISBN 91-27-72276-7 Lynn och Fauerst (2000), Introductory Digital Signal Processing with Computer Applications, second edition, Chichester, ISBN 0 471 97631 8 ALSTOM T- och K-standard SKF’s interaktiva produktkatalog med beräkningsfunktioner http://www.skf.com Artiklar och rapporter angående skapandet av tryck/ljud med hög amplitud http://www.bksv.com
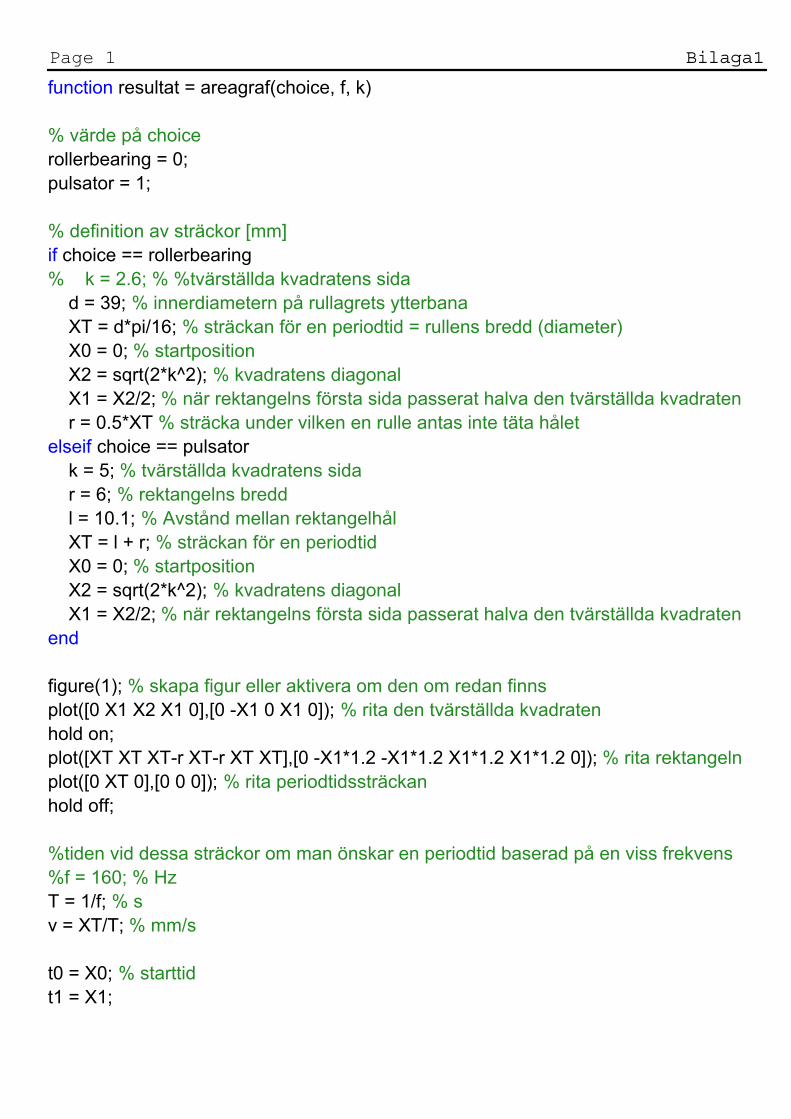
Page 1 Bilaga1function resultat = areagraf(choice, f, k)
% värde på choicerollerbearing = 0;pulsator = 1;
% definition av sträckor [mm]if choice == rollerbearing% k = 2.6; % %tvärställda kvadratens sida d = 39; % innerdiametern på rullagrets ytterbana XT = d*pi/16; % sträckan för en periodtid = rullens bredd (diameter) X0 = 0; % startposition X2 = sqrt(2*k^2); % kvadratens diagonal X1 = X2/2; % när rektangelns första sida passerat halva den tvärställda kvadraten r = 0.5*XT % sträcka under vilken en rulle antas inte täta håletelseif choice == pulsator k = 5; % tvärställda kvadratens sida r = 6; % rektangelns bredd l = 10.1; % Avstånd mellan rektangelhål XT = l + r; % sträckan för en periodtid X0 = 0; % startposition X2 = sqrt(2*k^2); % kvadratens diagonal X1 = X2/2; % när rektangelns första sida passerat halva den tvärställda kvadratenend
figure(1); % skapa figur eller aktivera om den om redan finnsplot([0 X1 X2 X1 0],[0 -X1 0 X1 0]); % rita den tvärställda kvadratenhold on;plot([XT XT XT-r XT-r XT XT],[0 -X1*1.2 -X1*1.2 X1*1.2 X1*1.2 0]); % rita rektangelnplot([0 XT 0],[0 0 0]); % rita periodtidssträckanhold off;
%tiden vid dessa sträckor om man önskar en periodtid baserad på en viss frekvens%f = 160; % HzT = 1/f; % sv = XT/T; % mm/s
t0 = X0; % starttidt1 = X1;
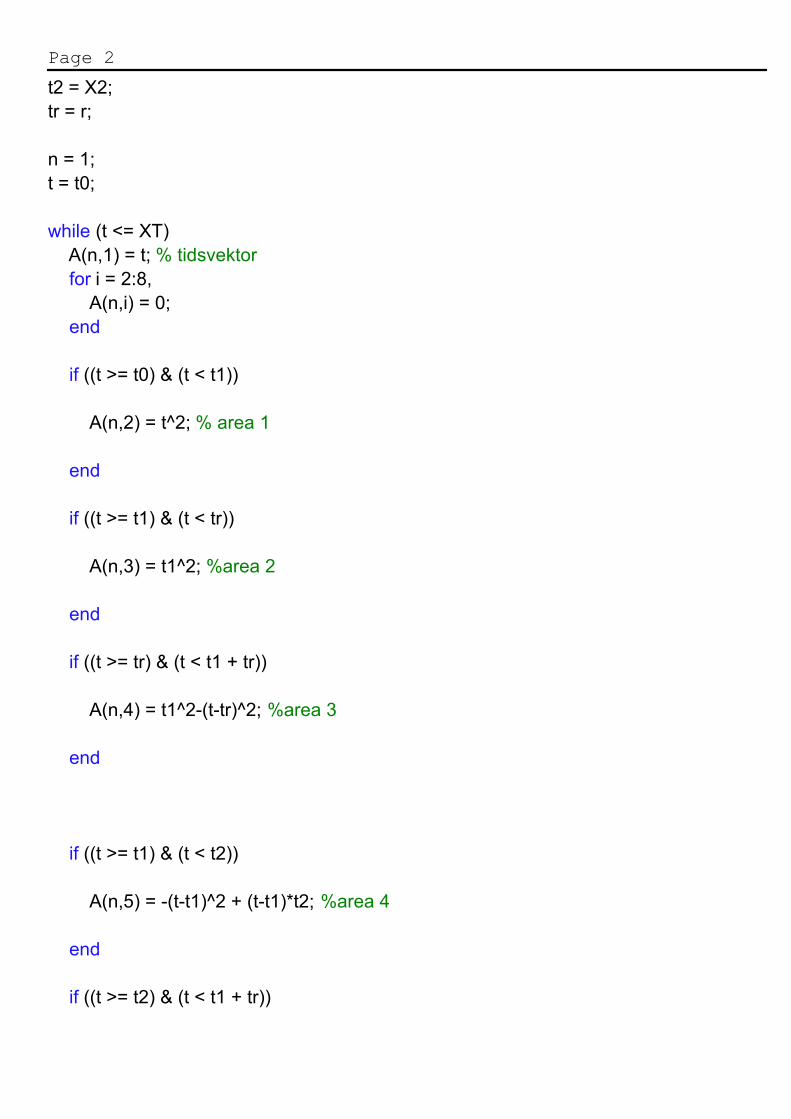
Page 2t2 = X2;tr = r;
n = 1;t = t0;
while (t <= XT) A(n,1) = t; % tidsvektor
for i = 2:8, A(n,i) = 0;
end
if ((t >= t0) & (t < t1))
A(n,2) = t^2; % area 1
end
if ((t >= t1) & (t < tr))
A(n,3) = t1^2; %area 2
end
if ((t >= tr) & (t < t1 + tr))
A(n,4) = t1^2-(t-tr)^2; %area 3
end
if ((t >= t1) & (t < t2))
A(n,5) = -(t-t1)^2 + (t-t1)*t2; %area 4
end
if ((t >= t2) & (t < t1 + tr))

Page 3
A(n,6) = t1^2; % area 5
end
if ((t >= t1 + tr) & (t < t2 + tr))
A(n,7) = t1^2 + (t-t1-tr)^2 - (t-t1-tr)*t2; % area 6
end
A(n,8) = A(n,2) + A(n,3) + A(n,4) + A(n,5) + A(n,6) + A(n,7); % alla areorna summerade
n=n+1; t=t+XT/1000;end
figure(2); % skapa figur eller aktivera om den om redan finns
subplot(2,1,1);plot(A(:,1)/v*1000, A(:,2:7)); % plotta area 1 till 7
legend('area 1', 'area 2', 'area 3', 'area 4', 'area 5', 'area 6')
subplot(2,1,2);plot(A(:,1)/v*1000, A(:,8)); % plotta summan av areornaxlabel('t [ms]')
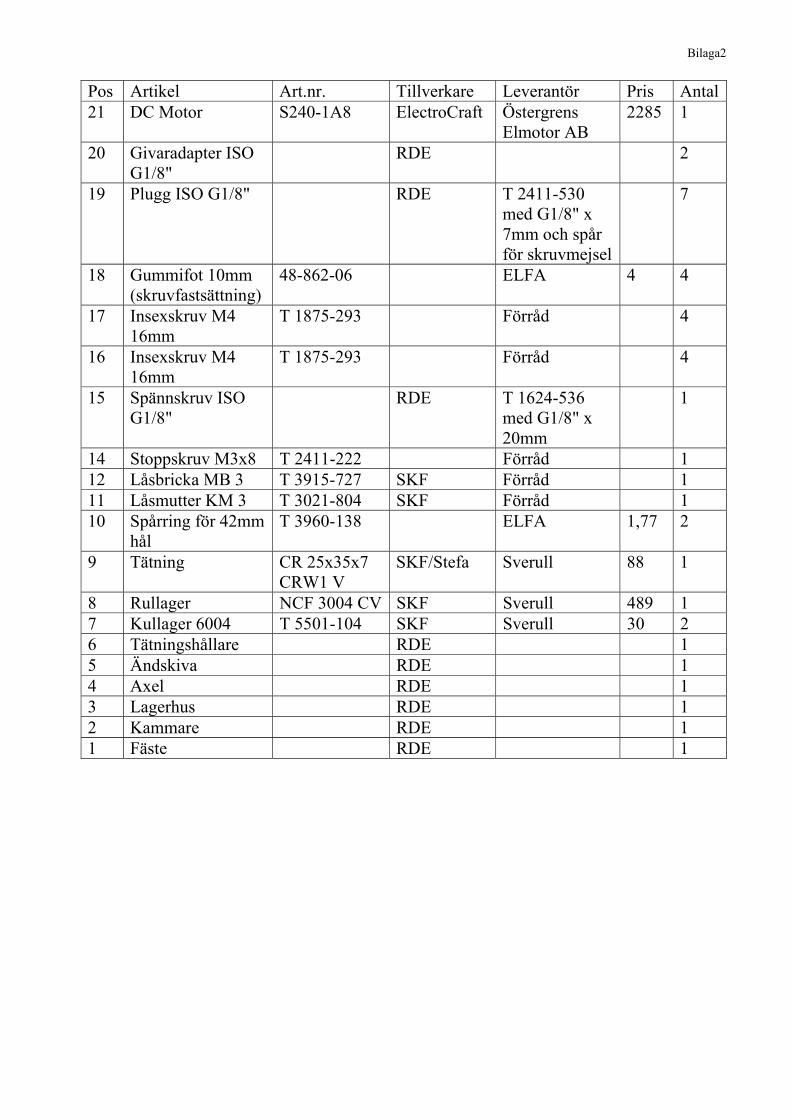
Bilaga2
Pos Artikel Art.nr. Tillverkare Leverantör Pris Antal21 DC Motor S240-1A8 ElectroCraft Östergrens
Elmotor AB 2285 1
20 Givaradapter ISO G1/8"
RDE 2
19 Plugg ISO G1/8" RDE T 2411-530 med G1/8" x 7mm och spår för skruvmejsel
7
18 Gummifot 10mm (skruvfastsättning)
48-862-06 ELFA 4 4
17 Insexskruv M4 16mm
T 1875-293 Förråd 4
16 Insexskruv M4 16mm
T 1875-293 Förråd 4
15 Spännskruv ISO G1/8"
RDE T 1624-536 med G1/8" x 20mm
1
14 Stoppskruv M3x8 T 2411-222 Förråd 1 12 Låsbricka MB 3 T 3915-727 SKF Förråd 1 11 Låsmutter KM 3 T 3021-804 SKF Förråd 1 10 Spårring för 42mm
hålT 3960-138 ELFA 1,77 2
9 Tätning CR 25x35x7 CRW1 V
SKF/Stefa Sverull 88 1
8 Rullager NCF 3004 CV SKF Sverull 489 1 7 Kullager 6004 T 5501-104 SKF Sverull 30 2 6 Tätningshållare RDE 1 5 Ändskiva RDE 1 4 Axel RDE 1 3 Lagerhus RDE 1 2 Kammare RDE 1 1 Fäste RDE 1
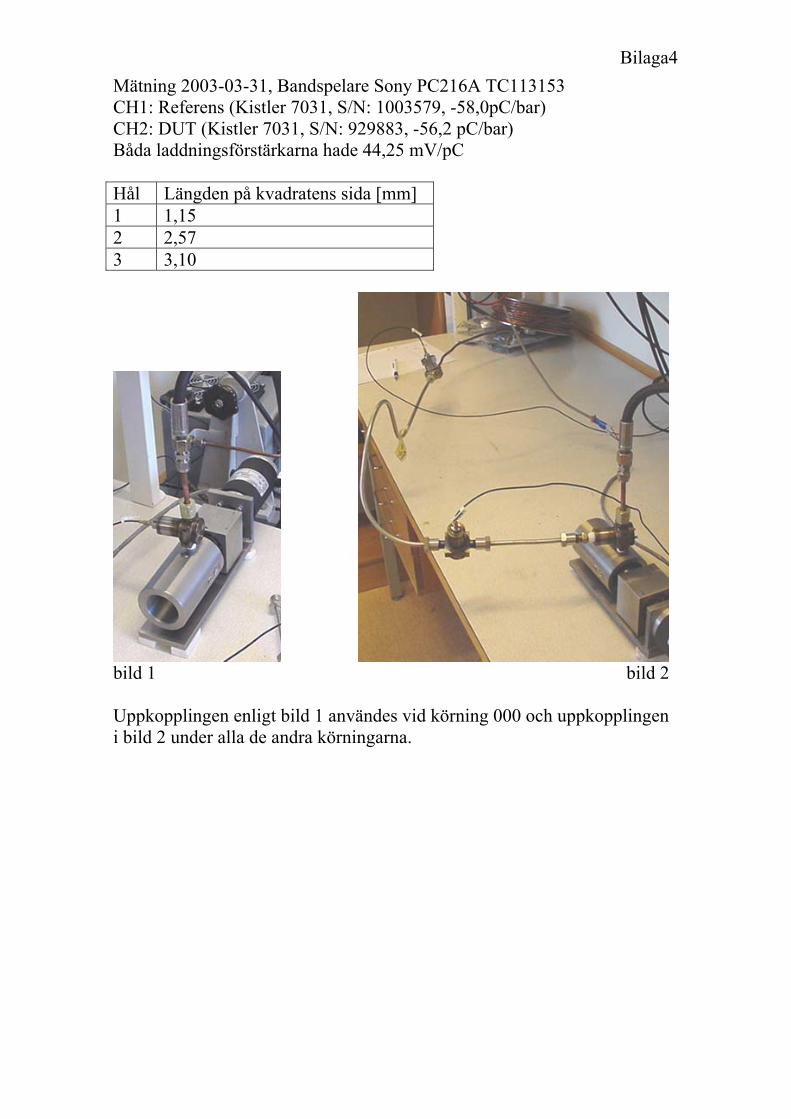
Bilaga4 Mätning 2003-03-31, Bandspelare Sony PC216A TC113153 CH1: Referens (Kistler 7031, S/N: 1003579, -58,0pC/bar) CH2: DUT (Kistler 7031, S/N: 929883, -56,2 pC/bar) Båda laddningsförstärkarna hade 44,25 mV/pC Hål Längden på kvadratens sida [mm] 1 1,15 2 2,57 3 3,10
bild 1 bild 2 Uppkopplingen enligt bild 1 användes vid körning 000 och uppkopplingen i bild 2 under alla de andra körningarna.
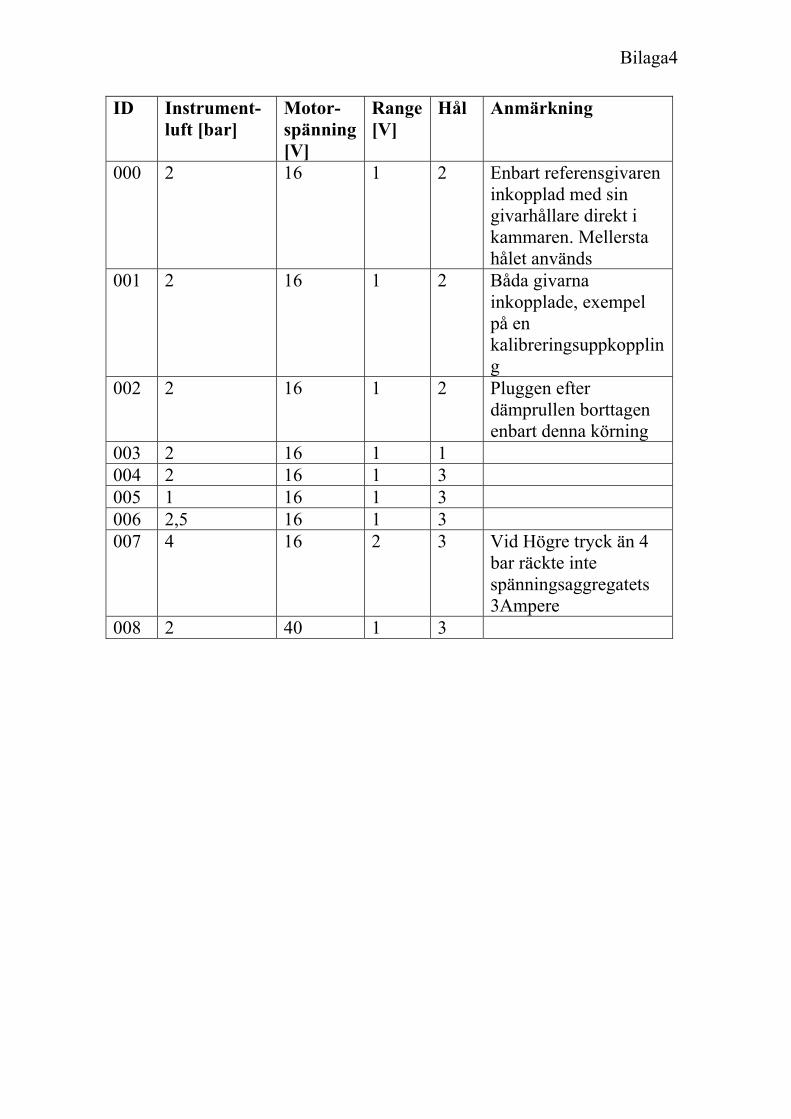
Bilaga4 ID Instrument-
luft [bar] Motor-spänning [V]
Range [V]
Hål Anmärkning
000 2 16 1 2 Enbart referensgivaren inkopplad med sin givarhållare direkt i kammaren. Mellersta hålet används
001 2 16 1 2 Båda givarna inkopplade, exempel på en kalibreringsuppkoppling
002 2 16 1 2 Pluggen efter dämprullen borttagen enbart denna körning
003 2 16 1 1 004 2 16 1 3 005 1 16 1 3 006 2,5 16 1 3 007 4 16 2 3 Vid Högre tryck än 4
bar räckte inte spänningsaggregatets 3Ampere
008 2 40 1 3
Bilaga4
0 20 40 60-500
0
500Tidssginal för körning 0, kanal 1
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 0, kanal 1
0 20 40 60-200
-100
0
100
200Tidssginal för körning 1, kanal 1
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 1, kanal 1
0 20 40 60-200
-100
0
100
200Tidssginal för körning 1, kanal 2
t [ms]
P [m
bar]
0 1000 2000 3000-200
-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 1, kanal 2
Bilaga4
0 20 40 60-200
-100
0
100
200Tidssginal för körning 2, kanal 1
t [ms]
P [m
bar]
0 1000 2000 3000-200
-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 2, kanal 1
0 20 40 60-100
-50
0
50
100Tidssginal för körning 2, kanal 2
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 2, kanal 2
0 20 40 60-60
-40
-20
0
20
40Tidssginal för körning 3, kanal 1
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 3, kanal 1
0 20 40 60-60
-40
-20
0
20
40Tidssginal för körning 3, kanal 2
t [ms]
P [m
bar]
0 1000 2000 3000-200
-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 3, kanal 2
Bilaga4
0 20 40 60-200
-100
0
100
200Tidssginal för körning 4, kanal 1
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 4, kanal 1
0 20 40 60-200
-100
0
100
200Tidssginal för körning 4, kanal 2
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 4, kanal 2
0 20 40 60-100
-50
0
50
100Tidssginal för körning 5, kanal 1
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 5, kanal 1
0 20 40 60-100
-50
0
50
100Tidssginal för körning 5, kanal 2
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 5, kanal 2
Bilaga4
0 20 40 60-200
-100
0
100
200Tidssginal för körning 6, kanal 1
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 6, kanal 1
0 20 40 60-200
-100
0
100
200Tidssginal för körning 6, kanal 2
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 6, kanal 2
0 20 40 60-400
-200
0
200
400Tidssginal för körning 7, kanal 1
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 7, kanal 1
0 20 40 60-400
-200
0
200
400Tidssginal för körning 7, kanal 2
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 7, kanal 2
Bilaga4
0 5 10 15 20-100
-50
0
50
100Tidssginal för körning 8, kanal 1
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 8, kanal 1
0 5 10 15 20-100
-50
0
50
100Tidssginal för körning 8, kanal 2
t [ms]
P [m
bar]
0 1000 2000 3000-150
-100
-50
0
Frequency (Hz)
dB/H
z
PSD för körning 8, kanal 2
körning ch1 ch2 ch1 ch2 ch1 ch20 275 - 778 - 157 -1 98 86 276 242 161 1612 74 62 208 174 160 1603 28 25 79 71 148 1484 94 81 267 230 144 1445 53 45 151 128 144 1446 116 101 328 285 144 1447 172 152 487 429 140 1408 53 42 151 120 463 463
f [Hz]Pp_to_p [mbar]Prms [mbar]
Page 1 Bilaga5function result = pulsator(data)% plottar de olika mätningarna i olika fönster och returnerar intressant% data
for i=1:size(data,1) figure(i); [rms, rms_power, power, freq, p_to_p] = measplot(i-1,data,10,160,3000,'db'); result(1,i) = rms(1); result(2,i) = rms(2); result(3,i) = rms_power(1); result(4,i) = rms_power(2); result(5,i) = power(1); result(6,i) = power(2); result(7,i) = freq(1); result(8,i) = freq(2); result(9,i) = p_to_p(1); result(10,i) = p_to_p(2);end
Page 1function data = measurehandling()% Öppnar källdatan från dess mat-filer, filerna kommer från SONY PCscan II% som kopierar datan från DAT-bandspelare
nds = 9; % nds: antal kanaler som skall öppnasseconds = 4.5; % antal sekunder som önskas kopieras
sensor(1) = -58.0; %pC/barsensor(2) = -56.2; %pC/baramplifier = 44.25; %mV/pC
Fs=48000;samples=seconds*Fs;
%räknar även om spänningen till tryck mha givar och laddningsförstärkarnas%karakteristikfor i = 1:nds filename = ['batch_0' int2str(i-1)] data(i,1,1:samples) = getfield(load(filename),filename,1,1:samples).*(1000/(sensor(1)*amplifier)); data(i,2,1:samples) = getfield(load(filename),filename,2,1:samples).*(1000/(sensor(2)*amplifier));end
Page 1function [rms, rms_power, power, freq, p_to_p] = measplot(id, msrmnt, n_T, assumed_freq, fft_end_freq, scale)% räknar ut intressant data och plottar tidssignal och PSD
for ch=1:2; measurement(1:length(msrmnt(id+1,ch,:))) = msrmnt(id+1,ch,:); % lägger den specifika datan som behövs i en vektor (senare klarar inte vissa funktioner bearbeta vektorer med fler än 2 dimensioner)
rms(ch) = sqrt(sum(measurement.*conj(measurement))/length(measurement)); %beräkna RMS p_to_p(ch) = rms(ch)*2*sqrt(2); %beräkna peak-to-peak rms_power(ch) = rms(ch)^2;
%assumed_freq = 160; %ungefärlig frekvens man tror signalen har%n_T = 'all'; %antal perioder som skall plottas
Fs = 48000; %rådatans samplingsfrekvens
if n_T == 'all'; % hur många perioder av tidssignalen som skall plottas time = (length(measurement)-1)/Fs; Tindex = length(measurement);
else time = n_T/assumed_freq; Tindex = n_T*Fs/assumed_freq+1;
end
t = 0:1/Fs:time; %tidsvektor subplot(2,2,ch*2-1), plot(t*1000, measurement(1,1:Tindex)*1000); %plotta tidssignalen V=axis; V(1,2)=time*1000; axis(V); clear V title(['Tidssginal för körning ' int2str(id) ', kanal ' int2str(ch)]); xlabel('t [ms]'); ylabel('P [mbar]');
[Pxx,w] = periodogram(measurement,[],length(measurement),Fs); %Beräkna PSD
Page 2
index = find(w > fft_end_freq); %anger hur många frekvenser som skall visas i PSD-plotten
%Plotta PSD subplot(2,2,ch*2), psdplot(Pxx(1:index(1,1)),w(1:index(1,1)), 'Hz',scale,['PSD för körning ' int2str(id) ', kanal ' int2str(ch)]);
if strcmpi(scale,'linear') ylabel('Power/Hz');
else ylabel('dB/Hz');
end
[power(ch) index] = max(Pxx); %grundtonens index och power freq(ch) = w(index); %index -> frekvens
if strcmpi(scale,'linear') hold on; plot(w(index),power(ch),'o'); hold off %rita ut toppen av grundtonen
end
clear measurement Fs time Tindex t Pxx w index;
end





























