Embed Size (px)
Citation preview

Journal of Computational and Applied Mathematics 105 (1999) 385–392
Two-point distortion for univalent functions
William Maa ; ∗, David Mindab; 1aSchool of Integrated Studies, Pennsylvania College of Technology, Williamsport, PA 17701-5799, USAbDepartment of Mathematical Sciences, University of Cincinnati, Cincinnati, OH 45221-0025, USA
Received 28 June 1997; revised 15 July 1998
Dedicated to Professor Haakon Waadeland on the occasion of his 70th birthday
Abstract
We discuss two-point distortion inequalities for (not necessarily normalized) univalent functions f on the unit diskD. By a two-point distortion inequality we mean an upper or lower bound on the Euclidean distance |f(a) − f(b)| interms of dD(a; b), the hyperbolic distance between a and b, and the quantities (1 − |a|2)|f′(a)|; (1 − |b|2)|f′(b)|. Theexpression (1 − |z|2)|f′(z)| measures the in�nitesimal length distortion at z when f is viewed as a function from Dwith hyperbolic geometry to the complex plane C with Euclidean geometry. We present a brief overview of the knowntwo-point distortion inequalities for univalent functions and obtain a new family of two-point upper bounds that re�ne theclassical growth theorem for normalized univalent functions. c© 1999 Elsevier Science B.V. All rights reserved.
Keywords: Two-point distortion; Univalent function
1. Introduction
We are concerned with two-point distortion theorems for univalent functions of the form introducedby Blatter [1]. In the following, we will let f denote an arbitrary univalent function on the unit diskD= {z: |z|¡1}, while g will designate a normalized (g(0) = 0; g′(0) = 1) univalent function on D.Let S be the family of normalized univalent functions.
∗ Corresponding author.1 Part of this work was completed while the second author was visiting the University of Tennessee in February–March
1997 under a Travel Grant for Research awarded by the Taft Foundation. This paper was presented at Continued Fractionsand Geometric Function Theory with the partial assistance of an Academic Meeting Travel Grant from the Taft Foundation.
0377-0427/99/$ - see front matter c© 1999 Elsevier Science B.V. All rights reserved.PII: S 0377-0427(99)00021-7

386 W. Ma, D. Minda / Journal of Computational and Applied Mathematics 105 (1999) 385–392
A function g ∈ S satis�es the classical growth and distortion theorems:|z|
(1 + |z|)26|g(z)|6 |z|(1− |z|)2 ; (1)
1− |z|(1 + |z|)36|g′(z)|6 1 + |z|
(1− |z|)3 : (2)
These inequalities are sharp; equality holds if and only if g is a rotation of the Koebe functionK(z)=z=(1−z)2. The growth and distortion theorems are necessary, but not su�cient, for univalence.In the interesting paper [1] Blatter obtained a two-point distortion theorem for univalent functionson D that is necessary and su�cient for univalence. He proved that if f is univalent on D, thenthe following inequality is valid for p= 2:
|f(a)− f(b)|¿ sinh(2dD(a; b))
2[2 cosh(2pdD(a; b))]1=p [|D1f(a)|p + |D1f(b)|p]1=p; (3)
where
dD(a; b) = tanh−1
∣∣∣∣ a− b1− �ab
∣∣∣∣is the hyperbolic distance between a and b and
D1f(z) = (1− |z|2)f′(z):
Moreover, equality holds for distinct a; b ∈ D if and only if f= S ◦ K ◦ T , where S is a conformalautomorphism of the complex plane C; K is the Koebe function and T is a conformal automorphismof D with T (a); T (b) ∈ (−1; 1). In words, equality holds if and only if f(D) is a slit plane andthe points f(a); f(b) lie on the extension of the slit into f(D). Conversely, it is elementary toshow that if f is holomorphic on D and satis�es (3) for any p¿ 0, then f is either univalent orconstant. Blatter’s method of proving (3) is an interesting mix of di�erential geometry, di�erentialinequalities and coe�cient bounds for functions in the class S.Kim and Minda [5] extended the work of Blatter in such a way that a connection with the
lower bound in (1) was made. They showed that inequality (3) is valid for all p¿ 32 for any
univalent function and that the result is sharp as in Blatter’s theorem. They also observed that theright-hand side of (3) is a decreasing function of p on [1;+∞) and the limiting case (p =∞) issimply an invariant version of the lower bound in (1). In this sense (3) for p¿1 can be viewedas a strengthening of the lower bound in (1). Kim and Minda also showed there is a family ofinequalities similar to (3) that is valid for all p¿1 and characterizes convex univalent functions.They observed that Blatter’s method could not establish (3) for all p¿1. Recently, by employing adi�erent method, Jenkins [4] proved the decisive result that inequality (3) is valid for all univalentfunctions for p¿1, but not for 0¡p¡1.At the same time Jenkins obtained an upper bound that is similar to (3). He showed that if f is
univalent on D and 0¡p¡∞, then|f(a)− f(b)|62−1−1=p sinh(2dD(a; b))[|D1f(a)|p + |D1f(b)|p]1=p: (4)
Equality holds for distinct a; b ∈ D if and only if f=S ◦L◦T , where S is a conformal automorphismof C; L(z) = z=(1 + z2) and T is a conformal automorphism of D with T (a) = −r; T (b) = r for
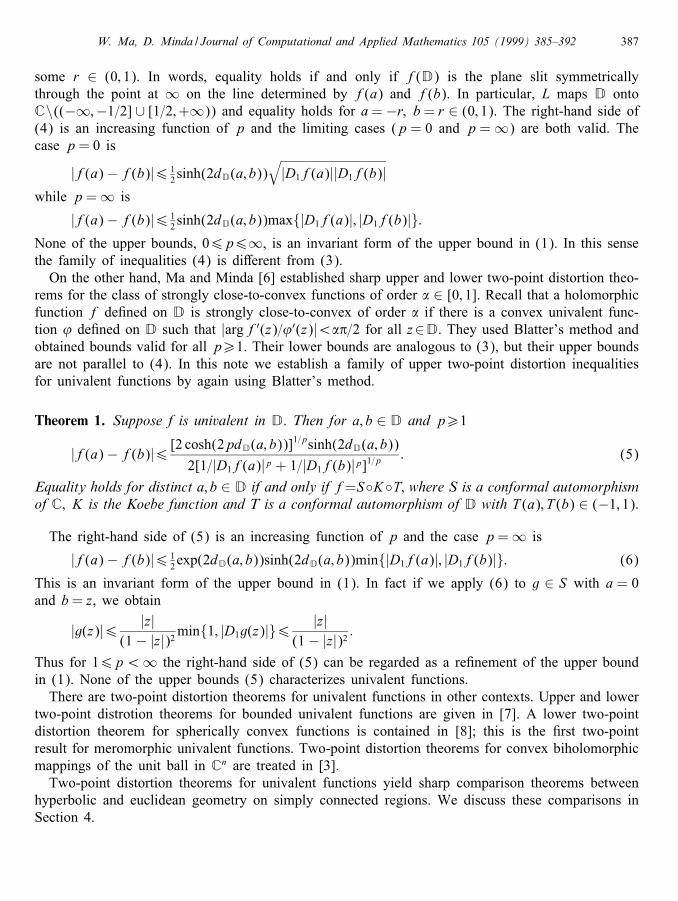
W. Ma, D. Minda / Journal of Computational and Applied Mathematics 105 (1999) 385–392 387
some r ∈ (0; 1). In words, equality holds if and only if f(D) is the plane slit symmetricallythrough the point at ∞ on the line determined by f(a) and f(b). In particular, L maps D ontoC\((−∞;−1=2] ∪ [1=2;+∞)) and equality holds for a=−r; b= r ∈ (0; 1). The right-hand side of(4) is an increasing function of p and the limiting cases (p = 0 and p =∞) are both valid. Thecase p= 0 is
|f(a)− f(b)|6 12 sinh(2dD(a; b))
√|D1f(a)||D1f(b)|
while p=∞ is
|f(a)− f(b)|6 12 sinh(2dD(a; b))max{|D1f(a)|; |D1f(b)|}:
None of the upper bounds, 06p6∞, is an invariant form of the upper bound in (1). In this sensethe family of inequalities (4) is di�erent from (3).On the other hand, Ma and Minda [6] established sharp upper and lower two-point distortion theo-
rems for the class of strongly close-to-convex functions of order � ∈ [0; 1]. Recall that a holomorphicfunction f de�ned on D is strongly close-to-convex of order � if there is a convex univalent func-tion ’ de�ned on D such that |argf′(z)=’′(z)|¡��=2 for all z∈D. They used Blatter’s method andobtained bounds valid for all p¿1. Their lower bounds are analogous to (3), but their upper boundsare not parallel to (4). In this note we establish a family of upper two-point distortion inequalitiesfor univalent functions by again using Blatter’s method.
Theorem 1. Suppose f is univalent in D. Then for a; b ∈ D and p¿1
|f(a)− f(b)|6 [2 cosh(2pdD(a; b))]1=psinh(2dD(a; b))
2[1=|D1f(a)|p + 1=|D1f(b)|p]1=p: (5)
Equality holds for distinct a; b ∈ D if and only if f=S◦K◦T; where S is a conformal automorphismof C; K is the Koebe function and T is a conformal automorphism of D with T (a); T (b) ∈ (−1; 1).
The right-hand side of (5) is an increasing function of p and the case p=∞ is
|f(a)− f(b)|6 12exp(2dD(a; b))sinh(2dD(a; b))min{|D1f(a)|; |D1f(b)|}: (6)
This is an invariant form of the upper bound in (1). In fact if we apply (6) to g ∈ S with a = 0and b= z, we obtain
|g(z)|6 |z|(1− |z|)2min{1; |D1g(z)|}6
|z|(1− |z|)2 :
Thus for 16p¡∞ the right-hand side of (5) can be regarded as a re�nement of the upper boundin (1). None of the upper bounds (5) characterizes univalent functions.There are two-point distortion theorems for univalent functions in other contexts. Upper and lower
two-point distrotion theorems for bounded univalent functions are given in [7]. A lower two-pointdistortion theorem for spherically convex functions is contained in [8]; this is the �rst two-pointresult for meromorphic univalent functions. Two-point distortion theorems for convex biholomorphicmappings of the unit ball in Cn are treated in [3].Two-point distortion theorems for univalent functions yield sharp comparison theorems between
hyperbolic and euclidean geometry on simply connected regions. We discuss these comparisons inSection 4.

388 W. Ma, D. Minda / Journal of Computational and Applied Mathematics 105 (1999) 385–392
2. Preliminaries
In addition to the di�erential operator D1 we need the di�erential operators D2 and D3 given by
D2f(z) = (1− |z|2)2f′′(z)− 2 �z(1− |z|2)f′(z);
D3f(z) = (1− |z|2)3f′′′(z)− 6 �z(1− |z|2)2f′′(z) + 6�z2(1− |z|2)f′(z):
These di�erential operators are invariant in the sense that |Dj(S ◦ f ◦ T )| = |Djf| ◦ T ( j = 1; 2; 3)whenever T is a conformal automorphism of D and S is a euclidean motion of C. Two combinationsof these operators for locally univalent functions occur frequently in practice:
Qf(z) =D2f(z)D1f(z)
= (1− |z|2)f′′(z)f′(z)
− 2 �zand
D3f(z)D1f(z)
− 32
(D2f(z)D1f(z)
)2= (1− |z|2)2Sf(z);
where
Sf(z) =f′′′(z)f′(z)
− 32
(f′′(z)f′(z)
)2
is the Schwarzian derivative of f. The absolute value of these two quantities is unchanged when fis replaced by S ◦ f ◦ T , where S is any conformal automorphism of C and T is any conformalautomorphism of D.For a normalized univalent function g de�ned on D; |g′′(0)|64 with equality if and only if g is
a rotation of K [2, p. 30]. This can be formulated invariantly as
|Qf(z)|64 (7)
for any univalent function f on D. We shall also need the Kraus–Nehari result [2, p. 263] whichasserts that
(1− |z|2)2|Sf(z)|66 (8)
for any univalent function f on D.An integral inequality that follows from two di�erential inequalities is essential for our proof.
Lemma 1. Suppose v ∈ C2[− L; L]; v¿ 0; |v′|64v and v′′616v. Then for any p¿1∫ L
−L
dsv(s)
6[2 cosh(4pL)]1=psinh(4L)
2[v(L)p + v(−L)p]1=p :
Equality holds if and only if v(s) = Ae±4s; where A¿ 0.
In particular, equality implies |v′|= 4v and v′′ = 16v. This result is established in [6].A region in C is called hyperbolic if C\ contains at least two points. This is equivalent to
asserting that there is a holomorphic universal covering projection f :D→ , which is a conformalmapping when is simply connected. The hyperbolic metric on D is
�D(z)|dz|= |dz|1− |z|2 :

W. Ma, D. Minda / Journal of Computational and Applied Mathematics 105 (1999) 385–392 389
The hyperbolic metric �(z)|dz| on a hyperbolic region is determined by �(f(z))|f′(z)|=�D(z),where f :D → is any holomorphic covering projection. It is independent of the choice of thecovering projection. We note that
�(f(z)) =1
|D1f(z)| :
The hyperbolic distance between A; B ∈ is de�ned by
d(A; B) = inf∫ �(z)|dz|;
where the in�mum is taken over all paths in joining A and B. We already have seen the explicitformula for dD. If f :D→ is any holomorphic covering projection, then d(f(a); f(b))6dD(a; b).This is an identity if f is a conformal mapping; that is, a conformal mapping is an isometry relativeto the hyperbolic distance.
3. Proof of Theorem 1
Fix distinct a; b ∈ D and let : z = z(s); −L6s6L, be the hyperbolic geodesic arc from a to bparameterized by hyperbolic arclength. This means that 2L= dD(a; b) is the hyperbolic length of and z′(s)=(1−|z(s)|2)ei�(s), where ei�(s) is a unit tangent for at z(s). At this point we only assumethat f is locally univalent on D, so f′(z) 6= 0 for z ∈ D. Set
v(s) = |D1f(z(s))|−1:It is elementary to show that
dds
|D1f(z(s))|= |D1f(z(s))|Re{ei�(s)Qf(z(s))}:Therefore,
v′(s) =−v(s)Re{ei�(s)Qf(z(s))}:Next,
v′′(s) =−v′(s)Re{ei�(s)Qf(z(s))} − v(s) ddsRe{ei�(s)Qf(z(s))}
= v(s)[Re2{ei�(s)Qf(z(s))} − d
dsRe{ei�(s)Qf(z(s))}
]:
A tedious calculation gives
dds[ei�(s)Qf(z(s))] = e2i�(s)(1− |z(s)|2)2Sf(z(s)) + 1
2 [ei�(s)Qf(z(s))]
2 − 2:See [6] for a more general result; the preceding formula makes use of the fact that the hyperboliccurvature of is 0. Recall that the hyperbolic curvature of at z(s) is
�h(z(s); ) = (1− |z(s)|2)�e(z(s); ) + Im{2ei�(s) �z(s)};

390 W. Ma, D. Minda / Journal of Computational and Applied Mathematics 105 (1999) 385–392
where
�e(z(s); ) =1
|z′(s)| Im{z′′(s)z′(s)
}
is the Euclidean curvature of at z(s). Then
v′′(s) = v(s)[Re2{ei�(s)Qf(z(s))} − 12Re{[ei�(s)Qf(z(s))]2}
−Re{e2i�(s)(1− |z(s)|2)2Sf(z(s))}+ 2]= v(s)[ 12 |Qf(z(s))|2 − Re{e2i�(s)(1− |z(s)|2)2Sf(z(s))}+ 2]6 v(s)[ 12 |Qf(z(s))|2 + (1− |z(s)|2)2|Sf(z(s))|+ 2]:
If we now assume that f is univalent, then (7) and (8) imply |v′(s)|64v(s) and v′′(s)616v(s).Because f ◦ is a path connecting f(a) to f(b),
|f(a)− f(b)|6∫f◦
|dw|=∫ |f′(z)|| dz|
=∫ L
−L|f′(z(s))|(1− |z(s)|2) ds
=∫ L
−L|D1f(z(s))| ds=
∫ L
−L
dsv(s)
with equality if and only if f ◦ is the euclidean line segment joining f(a) to f(b).The inequality in the lemma gives for p¿1
∫ L
−L
dsv(s)
6[2cosh(2pdD(a; b)]
1=p sinh(2dD(a; b))
2[
1|D1f(a)|p +
1|D1f(b)|p
]1=p
and equality implies |v′|= 4v.Together the two preceding inequalities show that (5) holds for any univalent function f on D
and all p¿1.Now, we determine when equality holds in (5). Suppose equality holds in (5) for distinct a; b ∈ D.
Then f ◦ is the straight line segment from f(a) to f(b) and |v′| = 4v implies |Qf(z(s))| = 4 on[− L; L]. Let T be a conformal automorphism of D with T (a) = 0 and T (b) = b̃¿ 0.Then T maps onto the interval [0; b̃].Next, we can determine a conformal automorphism S of C and B̃¿ 0 so that S(0)=f(a); S(B̃)=
f(b) and g= S−1 ◦f ◦T−1 has derivative 1 at the origin. Then g is a normalized univalent functionwhich maps [0; b] onto [0; B̃], so g is real valued on (−1; 1).The condition |Qf(a)| = 4 implies |Qg(0)| = 4, so g must be a rotation of the Koebe function.
This implies g(z) = K(z), or g(z) = −K(−z), since g is real-valued on (−1; 1). In the �rst case,f = S ◦ K ◦ T as desired.

W. Ma, D. Minda / Journal of Computational and Applied Mathematics 105 (1999) 385–392 391
In the second case, f= S̃ ◦K ◦ T̃ , where T̃ (z)=−T (z) and S̃(z)=S(−z) still have the appropriateform.Conversely, if f has the speci�ed form, it is straightforward to verify that equality holds.
4. Concluding remarks
Two-point distortion theorems yield comparison results between hyperbolic and Euclidean geom-etry on simply connected regions.
Theorem 2. Suppose is a simply connected hyperbolic region in the upper bound. Then for p¿1and A; B ∈
sinh(2d(A; B))
2[2cosh(2pd(A; B))]1=p
[1
�p(A)+
1�p(B)
]1=p6|A−B|6 [2cosh(2pd(A; B))]
1=p sinh(2d(A; B))
2[�p(A)+�p(B)]
1=p :
Equality holds in either inequality if and only if is a slit plane and A; B lie on the extension ofthe slit into .
Proof. The upper bound follows immediately from applying Theorem 1 to any conformal mappingf :D → since d(f(a); f(b)) = dD(a; b) and �(f(z)) = 1=|D1f(z)|. Similarly, the lower boundis obtained from Blatter’s result as improved by Kim-Minda and Jenkins.
As noted in [5] the lower bounds in Theorem 2 do not characterize simply connected regionseven though the corresponding two-point distortion theorem does characterize univalent functions.We want to show that Theorem 1 does not characterize univalent functions, and the upper bound inTheorem 2 does not characterize simply connected regions. The function f(z)=(1+z=1−z)i�; �¿ 0,is a covering projection of D onto the annulus A� = {w: exp(−��=2)¡ |w|¡ exp(��=2)} and [5]
|Qf(z)|62√1 + �2;
(1− |z|2)2|Sf(z)|62(1 + �2):Then inequalities (7) and (8) hold for f when 0¡�¡
√2. As we noted in the proof of Theorem
1, inequality (5) is valid for any locally univalent function f that satis�es inequalities (7) and (8).The fact that inequality (5) holds for f when 0¡�¡
√2 implies that the upper bound in Theorem 2
holds for A� when 0¡�¡√2. Given points A; B ∈ A�, select a; b ∈ D with f(a)=A; f(b)=B and
dD(a; b) = dA�(A; B). This latter equality can be achieved even though dD(z1; z2)¿dA�(f(z1); f(z2))in general. This shows that the upper bound in Theorem 2 is valid for A� for 0¡�¡
√2.
References
[1] C. Blatter, Ein verzerrungssatz f�ur schlichte Funktionen, Comment. Math. Helv. 53 (1978) 651–659.[2] P. Duren, Univalent Functions, Grundlehren der Math, Wissenschaften, vol. 259, Springer, New York, 1983.[3] C. Fitzgerald, S. Gong, Two-point distortion theorems for convex biholomorphic maps of the unit ball, preprint.
392 W. Ma, D. Minda / Journal of Computational and Applied Mathematics 105 (1999) 385–392
[4] J.A. Jenkins, On weighted distortion in conformal mapping II, preprint.[5] S. Kim, D. Minda, Two-point distortion theorems for univalent functions, Paci�c J. Math. 163 (1994) 137–157.[6] W. Ma, D. Minda, Two-point distortion theorems for strongly close-to-convex functions, Complex Variables Theory
Appl. 33 (1997) 185–205.[7] W. Ma, D. Minda, Two-point distortion theorems for bounded univalent functions, Ann. Acad. Sci. Fenn. 22 (1997)
425– 444.[8] W. Ma, D. Minda, Two-point distortion theorems for spherically convex functions, Rocky Mtn. J. Math., in press.







![ON CERTAIN COEFFICIENTS OF UNIVALENT FUNCTIONS. · PDF fileON CERTAIN COEFFICIENTS OF UNIVALENT FUNCTIONS. IIO BY JAMES A. JENKINS 1. In the first paper with this title [4] the author](https://img.pdfslide.net/doc/110x75/5a81234e7f8b9a24668cbd01/on-certain-coefficients-of-univalent-functions-certain-coefficients-of-univalent.jpg)








![Syllabus for Ph.D Programme - Department of …maths.du.ac.in/Courses/PhD/PDF/2015-16PhDSyllabus.docx · Web viewGoodman, Univalent Functions I & II, Mariner, Florida, 1983.[2] P](https://img.pdfslide.net/doc/110x75/5b1ca09c7f8b9a4125902cfd/syllabus-for-phd-programme-department-of-mathsduacincoursesphdpdf2015-.jpg)












