Embed Size (px)
Citation preview

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
1
Two-sided Online Micro-Task Assignment inSpatial Crowdsourcing
Yongxin Tong, Member, IEEE , Yuxiang Zeng, Bolin Ding, Libin Wang, and Lei Chen, Member, IEEE
Abstract—With the rapid development of smartphones, spatial crowdsourcing platforms are getting popular. A foundational researchof spatial crowdsourcing is to allocate micro-tasks to suitable crowd workers. Many existing studies focus on the offline scenario, whereall the spatiotemporal information of micro-tasks and crowd workers is given. In this paper, we focus on the online scenario and identifya more practical micro-task allocation problem, called the Global Online Micro-task Allocation in spatial crowdsourcing (GOMA)problem. We first extend the state-of-the-art algorithm for the online maximum weighted bipartite matching problem to the GOMAproblem as the baseline algorithm. Although the baseline algorithm provides a theoretical guarantee for the worst case, its averageperformance in practice is not good enough since the worst case happens with a very low probability in the real world. Thus, weconsider the average performance of online algorithms, a.k.a. random order model. We propose a two-phase-based framework, basedon which we present the TGOA algorithm with a 1
4-competitive ratio under the random order model. To improve its efficiency, we further
design the TGOA-Greedy and TGOA-OP algorithm following this framework, which runs faster than the TGOA algorithm with acompetitive ratio of 1
8and 1
4, respectively. We also revisit the average performance of Greedy, which has long been considered as the
worst due to its unbounded competitive ratio in the worst case. Finally, we verify the effectiveness and efficiency of the proposedmethods through extensive experiments on synthetic and real datasets.
Index Terms—Spatial Crowdsourcing; Task Assignment; Online Bipartite Matching
�
1 INTRODUCTION
In recent years, spatial crowdsourcing has attracted muchattention from the industry and the research communi-ties, where crowd workers (workers for short) are paid toperform micro-tasks (tasks for short) using their mobilephones [1]. For example, on Gigwalk [2] and TaskRabbit [3],consulting companies recruit crowd workers to check theprices of products in supermarkets, and Waze [4] usescrowd workers to collect real-time information of traffic orremaining parking lots.
A central issue in spatial crowdsourcing is task assign-ment (a.k.a. task allocation) [1], [5], [6], [7], which aims toassign tasks to suitable workers such that the total numberof assigned tasks or the total weighted value of the assignedtask-worker pairs is maximized. However, many studiesmake the offline scenario assumption, where the spatiotem-poral information of all the tasks and workers is knownbefore task assignment. Therefore, they are inapplicable inreal-time dynamic environments, where tasks and workersmay appear anywhere at anytime and require immediate re-sponses from the spatial crowdsourcing platforms. Imaginethe following scenario. At noon at weekends, Tony wantsto know how crowded his favorite restaurants around hishome are so that he can decide which restaurant to go to for
• Y. Tong and L. Wang are with the State Key Laboratory of SoftwareDevelopment Environment, School of Computer Science and Engineering,Beihang University, PR China. E-mail: {yxtong, lbwang}@buaa.edu.cn.
• Y. Zeng and L. Chen are with the Department of Computer Scienceand Engineering, Hong Kong University of Science and Technology,Clear Water Bay, Kowloon, Hong Kong, China. E-mail: {yzengal, le-ichen}@cse.ust.hk.
• B. Ding is with Alibaba Group, Bellevue, WA, USA. E-mail:[email protected]
lunch without waiting in queues. Thus, Tony posts a task ona spatial crowdsourcing platform (e.g., Gigwalk), and asksthe crowd to take photos of the waiting queues at the restau-rants. And he wants to receive immediate responses. Taskslike this arrive dynamically and require real-time response,and so do crowd workers. It raises a problem that mostspatial crowdsourcing platforms encounter: how to allocatethe tasks to suitable workers in real-time dynamic environments(a.k.a. online scenarios) and model such online scenarios?
In the offline scenario [1], the task assignment problemin spatial crowdsourcing can be solved by being reduced tothe problem of maximum weighted bipartite matching [8],where the tasks and workers correspond to the two dis-joint sets of vertices in a bipartite graph, and there is anedge between two vertices from the two disjoint sets if thecorresponding task locates in the restricted range of thecorresponding worker, whose weight is the correspondingutility value of the pair of tasks and workers. However, theoffline solutions become infeasible in the online scenariosince the arrival orders of tasks and workers are unknown.We illustrate this situation via the following toy example.
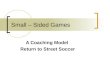
Example 1. Suppose we have six micro-tasks t1-t6 and threecrowd workers w1-w3 on a spatial crowdsourcing platform, whoseinitial locations are shown in a 2D space (X,Y ) in Fig. 1. Eachworker has a spatial restricted activity range, indicating that theworker can only conduct tasks within the range, which is shownas a dotted circle in Fig. 1. Each user also has a capacity, which isthe maximum number of tasks that can be assigned to him/her. Inthis example, w1-w3 have capacities of 1, 3, and 2, respectively (inbrackets). TABLE 1 presents the utility values between each pairof tasks and workers, which depends on the payoff of the task andthe success ratio of the worker that can be inferred from how well

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
2
TABLE 1: Utility between Micro-Tasks and Crowd Workers.t1 t2 t3 t4 t5 t6
w1 (1) 7 1 2 3 2 1w2 (3) 5 1 1 2 1 2w3 (2) 6 2 9 1 1 1
Fig. 1: Initial locations of micro-tasks and crowd workers.
this worker performed other tasks in history [1], [9]. In the offlinescenario, the total utility of the optimal task assignment, which ismarked in red in TABLE 1, is 17. However, in the online scenario,the offline solutions are not applicable since each task needs to bepromptly assigned to a worker who has already arrived and viceversa, and it is unknown which the next arrived task or workeris. For example, if the tasks and workers arrive following the “1storder” as shown in TABLE 2, w1 can be randomly assigned tot1 and w2 is assigned to t3 after their arrival. Note that whenw3 arrives, it can only be assigned to two of t4-t6, and thus thetotal utility is 7 + 1 + 1 + 1 = 10. However, if the tasks andworkers arrive following the “2nd order”, (t1, w1), (t3, w3) and(t4, w3) can be allocated respectively, resulting in a total utility of17, which is exactly the optimal allocation in the offline scenario.It indicates that the effectiveness of an online task assignmentsignificantly depends on the arrival orders of tasks and workers.
In this paper, we propose a new task assignment prob-lem in the online scenario, called the Global Online Micro-task Allocation in spatial crowdsourcing (GOMA) problem. Arelated branch of research is the online maximum weightedbipartite matching (OMWBM) problem [10], [11], [12], [13],[14], where the information of the left-hand vertices in abipartite graph is known, while the right-hand verticesarrive dynamically. The GOMA problem mainly differs fromthe OMWBM problem in that both the tasks and the workersare dynamic. That is, the GOMA problem is global online ortwo-sided online and generalizes the OMWBM problem.
As the example above shows, the arrival order of tasksand workers significantly affects the performance of thesolutions. Existing studies generally study the performanceof the online algorithms on the worst-case arrival order(i.e., adversarial order model). For example, Greedy-RT [14]achieves the best-known and nearly optimal guarantee un-der the adversarial order model, while the Greedy algorithmhas been considered to be ineffective due to its unboundedguarantee. However, we find that the Extended Greedy-RTdoes not perform well in practice and Greedy performsmuch better in our GOMA problem. The reason is that theworst-case order rarely occurs in real-world applications.Hence we focus on the average performance of onlinealgorithms, i.e., random order model. We present four moreeffective algorithms with much better guarantees (i.e., con-stant competitive ratio) under the random order model. Themain contributions of this work are:
TABLE 2: Arrival time of micro-tasks and crowd workers.Arrival Time 0 1 2 7 8 9 9 15 18
1st Order t1 t2 w1 w2 t3 t4 w3 t5 t62nd Order w1 t1 t2 t3 w3 t4 w2 t6 t5
• We identify a new online task assignment problem inspatial crowdsourcing, i.e., the GOMA problem.
• We extend the Greedy-RT algorithm as a baseline andpropose three algorithms TGOA, TGOA-Greedy, andTGOA-OP. We analyze their competitive ratios underthe adversarial order model and the random order model.
• We revisit the Greedy algorithm and our competitiveanalysis shows that the effectiveness of Greedy shouldnot be arbitrarily bad on average, which is much morepromising than the worst-case analysis.
• We verify the effectiveness and efficiency of the pro-posed methods through extensive experiments onreal and synthetic datasets. In terms of effectiveness,our proposed TGOA, TGOA-Greedy, TGOA-OP andGreedy are up to 169.58%, 93.21%, 170.13%, 167.07%better than the baseline Extended Greedy-RT.
A preliminary version of this work can be found in [15],and we make the following new contributions: (1) We de-sign a new algorithm TGOA-OP which is more effectiveand efficient by overcoming the drawbacks of TGOA (i.e.,unscalable) and TGOA-Greedy (i.e., with 50% lower com-petitive ratio than TGOA) proposed in [15]. (2) We analyzethe competitive ratios of the Greedy algorithm under therandom order model with various widely-used distribu-tions. (3) We conduct new evaluations on both synthetic andreal datasets.
The rest of the paper is organized as follows. We for-mulate our problem in Sec. 2 and review related work inSec. 3. We introduce our baseline in Sec. 4 and presentthree effective algorithms with constant competitive ratiosunder the random order model based on our two-phase-based framework in Sec. 5. Then we revisit the Greedyalgorithm and analyze its competitive ratio in Sec. 6. Finally,we conduct experiments in Sec. 7 and conclude in Sec. 8.
2 PROBLEM STATEMENT
We first define the GOMA problem in Sec. 2.1 and thenintroduce two competitive analysis models in Sec. 2.2.
2.1 Problem Definitions
Definition 1 (Micro-Task). A micro-task (“task” for short) is atuple t = 〈lt, at, dt, pt〉, which is posted on the platform at thelocation lt in the 2D space at time at. It can only be allocatedto a crowd worker who arrives at the platform before the responsedeadline dt with a payoff of pt.
Definition 2 (Crowd Worker). A crowd worker (“worker” forshort) is a tuple w = 〈lw, aw, dw, rw, cw, δw〉, who arrives atthe platform at the initial location lw in the 2D space at time aw.He/She can perform several tasks that arrive at the platform beforehis/her response deadline dw with two constraints: (1) He/She canperform at most cw tasks (i.e., his/her capacity); (2) He/She canonly perform tasks posted within a circular range centered at lwand with a radius of rw. δw ∈ (0, 1] is the success ratio of wbased on his/her historical task completion records.
Definition 3 (Utility). The utility that a worker w performs atask t is measured by U(t, w) = pt × δw.

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
3
Micro-tasks are usually simple, e.g., taking a photo orchecking prices in the supermarket. In practice, a spatialcrowdsourcing platform usually uses a success ratio torepresent the reliability of workers to complete these micro-tasks. Thus, the utility function not only maximizes thepayoff of the workers but also guarantees the reliability ofthe assigned workers. Without loss of generality (WLOG),we assume that U(t, w) is between 0 and Umax.
Finally, we define our Global Online Micro-task Allocationin spatial crowdsourcing (GOMA) problem.
Definition 4 (GOMA Problem). Given a set of tasks T , a set ofworkers W , and a utility function U(., .) on a spatial crowdsourc-ing platform, which is unaware of the spatiotemporal informationof tasks and workers till their arrival, the GOMA problem is tofind an allocation M among the tasks and the workers to maximizethe total utility MaxSum(M) =
∑t∈T,w∈W U(t, w) such that
the following constraints are satisfied:• Deadline Constraint. After a task t arrives, it is either
assigned to a worker w who has arrived at the platform beforethe response deadline dt or is not assigned thereafter, and viceversa.
• Invariable Constraint. Once a task t is assigned to a workerw, the assignment of (t, w) cannot be changed.
• Capacity Constraint. The number of tasks assigned to aworker w cannot exceed his/her capacity cw.
• Range Constraint. Any task assigned to a worker w mustlocate in the restricted range of w.
In the GOMA problem, the total utility of the allocationcan represent many practical meanings on real applications,including the total number of assigned tasks [16] (∀t, pt = 1and ∀w, δw = 1), the expected total number of assignedtasks [17], [18] (∀t, pt = 1), the total payoff of the work-ers [19], [20] (∀w, δw = 1), the expected total payoff of theworkers [21]. Thus, the matching result with larger utilityindicates better effectiveness on real applications.
2.2 Competitive Analysis Models
In the following, we first provide the offline version of theGOMA problem and then formally introduce the compet-itive analysis models, which is usually compared with theoptimal result in the offline scenario.
The offline version of the GOMA problem (“offlineGOMA” for short) is identical to the GOMA problem ex-cept that the spatiotemporal information of all the tasksand the workers is known at the beginning. The offlineGOMA problem is unrealistic since both tasks and workersappear dynamically. The optimal solution to the offlineGOMA problem (see our supplemental materials [22]) canbe regarded as the upper bound of any online algorithm.WLOG we use OPT to denote the optimal assignment andMaxSum(OPT ) to denote the optimal total utility.
Competitive ratio (CR) is a widely used metric to evaluatethe performance of online algorithms [23]. In particular, thecompetitive ratio measures how good an online algorithmis compared with the optimal result of the offline versionwhere all the information is provided. Based on differentassumptions on the arrival order, we introduce two compet-itive analysis models for the GOMA problem, the adversarialorder model and the random order model, which focus on the
worst-case arrival order and the stochastic arrival order ofall the tasks and workers, respectively.
Definition 5 (CR in the Adversarial Order Model). Thecompetitive ratio in the adversarial order model of a specific onlinealgorithm is the minimum ratio between the result of the onlinealgorithm and the optimal result of the worst-case arrival orderover all possible arrival orders of the tasks and the workers,
CRAO = min∀G(T,W,U) and ∀v∈V
MaxSum(M)
MaxSum(OPT )(1)
where G(T,W,U) is an arbitrary input of tasks, workers andtheir utilities, V is the set of all possible arrival orders, v is oneorder in V , MaxSum(M) is the total utility produced by theonline algorithm, and MaxSum(OPT ) is the optimal total utilityof the offline version.
Definition 6 (CR in the Random Order Model). The competi-tive ratio in the random order model of a specific online algorithmis the minimum ratio between the expected result of the onlinealgorithm and the expected optimal result over all possible arrivalorders of the tasks and the workers,
CRRO = min∀G(T,W,U)
E[MaxSum(M)]
E[MaxSum(OPT )](2)
where G(T,W,U) is an arbitrary input of tasks, workers andtheir utilities, E[MaxSum(M)] is the expected total utility pro-duced by the online algorithm over all possible arrival orders, andE[MaxSum(OPT )] is the expected optimal total utility of theoffline version over all possible arrival orders.
3 RELATED WORK
Our work is related to two categories of research, spatialcrowdsourcing and online maximum bipartite matching.
3.1 Spatial CrowdsourcingRecently, a wide spectrum of operations for crowdsourcingare studied and many crowd-powered database systemshave been developed, such as similarity join [24], [25],SLADE [26], iCrowd [27], CDB [28], etc. Task assignmentis one of the most important issues in crowdsourcing [29].Existing studies usually study task assignment in the offlinescenarios by learning the quality of crowd workers [27], [30].All these studies focus on data management for traditionalcrowdsourcing rather than spatial crowdsourcing.
In spatial crowdsourcing, [1] firstly introduces the majortaxonomy and [5], [7], [31] comprehensively describe thechallenges of spatial crowdsourcing. [9] aims to maximizethe expected total number of assigned tasks and [17], [18],[21] integrate the success ratio or reliability of workers intothe task assignment problem. All these studies focus on thetask assignment problem in the offline scenario and hencecan not be applied in the real-time spatial crowdsourcingapplications, where tasks and workers dynamically arrive.
Some recent works focus on the dynamic environmentin spatial crowdsourcing. Specifically, [32] studies the taskassignment problem of minimizing total latency in spatialcrowdsourcing. [16], [33] aim to maximize the number ofassigned tasks and [34] aims to minimize the total travelcost of the workers. [35] proposes a matching-based methodto dynamically adjust the payoff of the tasks. [36], [37], [38]focus on maximizing the total utility in the online routeplanning problem, which are all different from our problem.

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
4
The closely related works are [19], [20], [39], [40], whichalso studies the online task assignment problems in spatialcrowdsourcing. The main differences between these worksand ours are summarized as follows:
(1) In our online scenario, all the tasks and workers candynamically appear anywhere and anytime, but in [19],[20], [39] only tasks are dynamic. Besides, [19], [20],[40] assume the appearance of the tasks follows theindependent and identical distribution (IID) and [40]also restricts that workers follow the IID distribution,which is impractical in real-world spatial data [41].
(2) In our problem setting, the workers may fail to completethe tasks, which is usually true in practice. However,[19], [20], [40] assume the workers will always completethe tasks.
(3) Our goal is to maximize the total utility of the assignedpairs of tasks and workers, while [39] maximizes thenumber of assigned tasks and [20], [40] maximize thetotal payoff the assigned tasks.
Therefore, the solutions in the above studies can not beextended to solve our problem.
3.2 Online Maximum Bipartite Matching
Our GOMA problem is related to the Online MaximumBipartite Matching (OMBM) problem [23]. The input of theOMBM problem is a bipartite graph G = (L,R,E), whereL denotes the left-hand vertices, R denotes the right-handvertices, and E denotes the set of edges. Specifically, thevertices in R always arrive one by one and the verticesin L either arrive at the beginning (i.e., one-sided OMBM)or also dynamically appear (i.e., two-sided OMBM). In thefollowing, we classify the representative and recent worksbased on the objectives into two categories: maximizing thematching size and maximizing the total weight.
Maximizing the Matching Size. In practice, the size ofthe matching result equals to the number of the assignedtasks. Karp et al. [10] first study the one-sided version of thisproblem under the adversarial order model. They proposethe Greedy algorithm with a competitive ratio of 0.5 and theRanking algorithm with a better ratio of 1 − 1
e . The Greedyalgorithm achieves the same competitive ratio in the two-sided version [42] and the competitive ratio of 1 − 1
e underthe random order model [43]. To beat the Greedy algorithm,[42] proposes a Water-filling algorithm with a ratio of 0.526and [44] extends the Ranking algorithm to achieve thebest-known ratio of 0.5541. However, extensive experimentson both synthetic and real datasets show that the Greedyalgorithm always has a larger matching size in practice [41].Thus, in this paper, we revisit the Greedy algorithm for theGOMA problem and analyze its competitive ratio.
Maximizing the Total Weight. The OMBM problem,whose objective is maximizing the total weight of the match-ing, is also known as Online Maximum Weighted BipartiteMatching (OMWBM) problem [23]. The weight of each edge(i.e., utility) can be either determined by only the left-hand vertices [11], [12] or both left-hand and right-handvertices [13], [14].
Since the weight of each edge in [11], [12] is determinedby the vertices that are known at the beginning, both studiesuse different methods to define the priorities of allocating
Algorithm 1: Extended Greedy-RT
input : T,W,U(., .)output: A feasible allocation M
1 θ ← �ln(Umax + 1)�;2 k ← randomly choose an integer from
{0, · · · , θ − 1};3 foreach newly arrived task or worker v do4 Cand ← {∀u|u is an unmatched neighbor of v
such that U(u, v) ≥ ek and it satisfies all theconstraints};
5 if Cand is not empty then6 u∗ ← an arbitrary item is chosen from Cand;7 M ← M ∪ {(u∗, v)};
8 return M ;
these known vertices L to the dynamically arriving ver-tices R. However, as all the vertices dynamically appear inGOMA, their solutions can not be applied in our problem.
[13], [14] study the one-sided OMBM problem withthe same objective as our GOMA problem. [13] proposesa sample-and-price algorithm with a competitive ratio of0.125. However, [13] does not support both the deadlineconstraint and the capacity constraint, and hence can notbe applied in spatial crowdsourcing applications. Amongthese studies, only [14] can be extended to our GOMAproblem since it does not rely on impractical assumptionsand supports all the constraints. Moreover, [14] still achievesthe best-known and nearly optimal competitive ratio under theadversarial order model. Hence, the extended solution of[14] is still the best baseline to assess the effectiveness andefficiency of our proposed algorithms. Besides, we also usethe optimal results in the offline scenario to demonstrate theeffectiveness of our algorithms in practice.
4 BASELINE ALGORITHM
In this section, we extend the Greedy-RT algorithm [14] asour baseline. The Greedy-RT algorithm has the best-knownand nearly optimal competitive ratio under the adversarialorder model for the one-sided OMWBM problem, where onlyleft-hand vertices in the bipartite graph arrive online.
Basic Idea. The basic idea of the Extended Greedy-RT algo-rithm is to first randomly choose a threshold on the weightsof edges, and then randomly choose an edge incident to eachnewly arrived vertex among those edges whose weights areno less than the threshold.
Algorithm Details. Algo. 1 illustrates the procedure ofthe Extended Greedy-RT algorithm. In lines 1-2, we firstrandomly choose a threshold (ek) on the weights of edgesaccording to the estimated maximum weight Umax. Whena new vertex (either a task or a worker) arrives, ExtendedGreedy-RT adds an edge among the ones whose weights areno less than a threshold and that satisfy all the constraintsto the match result in lines 3-7. If a worker with capacity cwarrives, Algo. 1 regards him/her as cw duplicates of w thatarrive at the same time and processes them one by one.Example 2. Back to our running example in Example 1. Algo. 1sets θ = �ln(9 + 1)� = 3, so k ∈ {0, · · · , 2}. If k is chosen as0, the threshold is e0 = 1. According to the 1st arrival order inTABLE 2, when w1 arrives, the candidate set is {t1, t2}, and we

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
5
would assign t1 to w1. Similarly, t3 and t4 are allocated to w2 andw3, respectively. Thus, when k = 0, the total utility is 10. SinceAlgo. 1 is a randomized algorithm on choosing k, the expectationof the total utility for all possible k is 10+16+16
3 = 14.
Complexity Analysis. For each newly arrived task orworker, the time and space complexities of the ExtendedGreedy-RT algorithm are both O(max(|T |, |W |)).Competitive Analysis. Since Extended Greedy-RT (Algo. 1)is a randomized algorithm, we analyze the (expected) com-petitive ratio under the adversarial order model in Lemma 1.
Lemma 1. The competitive ratio of Extended Greedy-RT algo-rithm is 1
2e�ln(Umax+1)� under the adversarial order model.
Proof. Please see our supplemental materials [22].
Although Extended Greedy-RT provides a theoreticalguarantee for the worst case by randomization, the worst-case arrival order only appears with a low probability ( 1
n! ) ifthe total number of tasks and workers is n. This is becausethe worst-case arrival order is only one among n! differentpossible arrival orders. We argue that the average perfor-mance of online algorithms is more important in real-worldapplications. Below we design algorithms with effectivecompetitive ratios under the random order model, whichmeasures the average performance of online algorithms.
5 A TWO-PHASE-BASED FRAMEWORK
This section presents a two-phase-based framework for theGOMA problem. Based on the framework, we first presenta Two-phase-based Global Online Allocation (TGOA) algorithmwith a competitive ratio of 1
4 . To improve its time efficiency,we further present the TGOA-Greedy algorithm, which isfaster than the TGOA algorithm but with a slightly lowercompetitive ratio of 1
8 . Finally, we propose TGOA-OP basedon the same framework, which is also more efficient butkeeps the competitive ratio 1
4 .
5.1 TGOA Algorithm
Basic Idea. Inspired by the solution to the secretary prob-lem [13], our basic idea is to first divide all the vertices(both tasks and workers) into two equal groups based ontheir arrival orders and adopt different strategies on them.
• For the first half of tasks and workers, TGOA conductsa greedy strategy to assign each newly arrived task(worker) to the corresponding worker (task) with thehighest utility and satisfying all the constraints.
• For the other half of tasks and workers (i.e., the secondhalf of vertices), we adopt a more optimal strategy.Specifically, among the second-half vertices that havearrived, including the newly arrived v, we hypotheti-cally find a global optimal match Mv using the Hungar-ian algorithm [8]. If v is matched in the global optimalmatch Mv , we assign v to the corresponding vertex thatis matched to v in Mv if such a vertex has not beenassigned and satisfies all the constraints.
Algorithm Details. Algo. 2 illustrates the procedure ofTGOA. In line 1, we calculate the number of the first half ofvertices k ← �m+n
2 �, where m is the total number of tasksand n is the total capacities of workers. That is, for eachworker with capacity cw, we treat him/her as cw duplicatedworkers who arrive at the same time. The values of m and n
Algorithm 2: TGOA
input : T,W,U(., .)output: A feasible allocation M
1 m ← |T |, n ← ∑w∈W cw, k ← �m+n
2 �;2 Multiset WΔ ← ∅, TΔ ← ∅;3 for each newly arrived task or worker v do
4 if |TΔ|+ |WΔ| < k then // Phase I:greedy strategy
5 if v is a worker then6 t ← the task with the highest utility that is
unmatched and satisfies all constraints;7 if t exists then M ← M ∪ {(t, v)} ;
8 else9 w ← the worker with the highest utility
that is unmatched and satisfies allconstraints;
10 if w exists then M ← M ∪ {(v, w)} ;
11 else // Phase II: optimal strategy12 Mv ← Hungarian(TΔ ∪WΔ ∪ {v});13 if v is matched in Mv then14 if v is a worker then15 t ← the task assigned to v in Mv ;16 if t is unmatched in M and satisfies all
constraints then M ← M ∪ {(t, v)} ;
17 else18 w ← the worker assigned v in Mv ;19 if w is unmatched in M and satisfies all
constraints then M ← M ∪ {(v, w)} ;
20 if v is a worker then
WΔ ← WΔ ∪ {cv duplicated workers v} ;21 else TΔ ← TΔ ∪ {v} ;
22 return M ;
can be estimated by historical records. In line 2, we initializetwo sets to store the vertices that have arrived. Note thatWΔ is a multiset. Then in lines 3-21, we iteratively processeach newly arrived task or worker. Particularly, we adopt agreedy strategy on the first half of the vertices in lines 4-10and adopt a more optimal strategy on the second half of thevertices in lines 12-19. For each vertex in the first half, weeither assign a task with the highest utility that satisfies allthe constraints if it is a worker (lines 6-7) or assign a workerwith the largest utility that satisfies all the constraints if it isa task (lines 9-10). Then for each vertex in the second half,we first run the Hungarian algorithm [8] on the verticesthat have arrived to obtain a current global optimal matchMv in line 12. If v is matched in Mv , we either assign to vthe corresponding task that is matched to v in Mv if v is aworker (lines 15-16) or assign to v the corresponding workerthat is matched to v in Mv is v is a task if such allocationis feasible (lines 18-19). Finally, the sets TΔ and WΔ areupdated in lines 20-21.
Example 3. Back to our running example in Example 1. TheTGOA algorithm first estimates m = 6, n = 1+3+2 = 6, k =6+62 = 6. Based on the 1st arrival order in TABLE 2, for the first
half of the vertices, i.e., the first 6 arrived tasks and duplicatesof workers, TGOA assigns t1 to w1. For the second half of the

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
6
vertices, t3 and t4 are assigned to w3. Therefore, the total utilityis 7+9+1=17, which is better than Extended Greedy-RT.
Complexity Analysis. For each task or worker in the firsthalf, the time and space complexities of TGOA are bothO(max(|T |, |W |)). For each task or worker in the sec-ond half, the time and space complexities of TGOA areO(max(|TΔ|3, |WΔ|3)) and O(max(|TΔ|2, |WΔ|2)).Competitive Analysis. For convenience, we use a variantof TGOA, TGOA-Filter, which ignores the first half of tasksand workers and only performs lines 12-21 of TGOA forthe second half of tasks and workers. Hence the competitiveratio of TGOA must be larger than that of TGOA-Filter. Thefollowing analysis assumes that TGOA-Filter filters out thefirst �m+n
2 � arrived items in the first half.The analysis about TGOA-Filter relies on the fact that,
for each newly arrived item v, the probability of v ∈ T (vbeing a task) equals that of v ∈ W (v being a worker). Forthe first �m+n
2 � arrived items that are filtered out by TGOA-Filter, we can assume that �m+n
4 � tasks and �m+n4 � workers
are filtered out, respectively. When TGOA-Filter processesthe i-th arrived item v (i ∈ [�m+n
2 �+ 1,m+ n]), |TΔ| tasksand |WΔ| workers have already arrived. Hence, we havethe following lemmas.
Lemma 2. E[MaxSum(Mv)] ≥ |TΔ||WΔ|mn
E[MaxSum(OPT )]
Proof. Let OPT(|TΔ|,n) be the optimal matching generatedby the Hungarian algorithm for the offline weighted bi-partite graph, which includes |TΔ| tasks and n workers,so MaxSum(OPT(|TΔ|,n)) is the total utility of OPT(|TΔ|,n).Due to the randomness of the random order model, WΔ canbe considered as the set of |WΔ| workers who are uniformlychosen from W . Therefore, we have
E[MaxSum(Mv)] ≥|WΔ|n
E[MaxSum(OPT(|TΔ|,n))]
Similarly, TΔ can also be considered as the set of |TΔ| taskswhich are uniformly chosen from T , and we have
MaxSum(OPT(|TΔ|,n)) ≥|TΔ|m
E[MaxSum(OPT )]
Therefore,
E[MaxSum(Mv)] ≥|TΔ|m
· |WΔ|n
E[MaxSum(OPT )]
Based on Lemma 2, we can derive the following lemma.
Lemma 3.{E[U(v, w)] ≥ |WΔ|
mnE[MaxSum(OPT )] v ∈ T
E[U(t, v)] ≥ |TΔ|mn
E[MaxSum(OPT )] v ∈ W
Proof. If v ∈ T , when v arrives at the platform and is addedinto TΔ, which is the set of tasks that have arrived, v canbe considered as a task that is uniformly chosen from TΔ.Thus, the expectation of the utility of edge (v, w) ∈ Mv is
E[U(v, w)] =1
|TΔ|E[MaxSum(Mv)]
According to Lemma 2, we have
E[U(v, w)] =1
|TΔ|E[MaxSum(Mv)] ≥ |WΔ|mn
E[MaxSum(OPT )]
Similarly, we can also obtain the expectation of the utilityof edge (t, v) ∈ Mv if v ∈ W ,
E[U(t, v)] =1
|WΔ|E[MaxSum(Mv)] ≥ |TΔ|mn
E[MaxSum(OPT )]
Lemma 2 and Lemma 3 provide a bound on the expec-tation of the utility of edge (v, w) ∈ Mv (or (t, v) ∈ Mv)under the random order model, which is added into thefinal matching iff w (or t) is not matched before the i-th itemv arrives. We further analyze the probability that the task orworker matched to v is unmatched when the (�m+n
2 �+1)-thto (i− 1)-th items arrive.
Lemma 4.⎧⎪⎨⎪⎩
Pr(w is unmatched in steps [�m+n
2�+ 1, |TΔ| − 1]
) ≥ �m+n4
�|TΔ|−1
v ∈ T
Pr(t is unmatched in steps [�m+n
2�+ 1, |WΔ| − 1]
) ≥ �m+n4
�|WΔ|−1
v ∈ W
Proof. If v ∈ T , we construct T′= {t�m+n
4 �+1, · · · , t|TΔ|−1},which is the set of the tasks that arrive after the (�m+n
4 �)-thtask but before v. Let tj ∈ T ′ be the j-th task which arrives,then worker w is assigned to tj with probability at most 1
jsince at least the first j−1 arriving tasks cannot be matchedto w. That is, for the j-th arrived task, w is unmatched withprobability at least j−1
j . Hence we have
Pr(w is unmatched in steps [�m+ n
2�+ 1, |TΔ| − 1]
)
≥|TΔ|−1∏
j=�m+n4 �+1
j − 1
j=
�m+n4 �
|TΔ| − 1
Similarly, if v ∈ W , we have
Pr(t is unmatched in steps [�m+ n
2�+1, |WΔ|−1]
) ≥ �m+n4
�|WΔ| − 1
Lemma 3 and Lemma 4 lead to the following lemma.
Lemma 5.⎧⎨⎩E[U(v, w) ∈ M ] ≥ �m+n
4�
|TΔ|−1· |WΔ|
mnE[MaxSum(OPT )] v ∈ T
E[U(t, v) ∈ M ] ≥ �m+n4
�|WΔ|−1
· |TΔ|mn
E[MaxSum(OPT )] v ∈ W
Proof. If v ∈ T , the edge (v, w) ∈ Mv can be added tothe final match, M , of TGOA-Filter if and only if w is notmatched when the (�m+n
2 �+1)-th to (i− 1)-th items arrive.According to Lemma 3 and Lemma 4, we can obtain theexpectation of the utility U(v, w) ∈ M
E[U(v, w) ∈ M ] ≥ �m+n4 �
|TΔ| − 1× |WΔ|
mnE[MaxSum(OPT )]
Similarly, we can also obtain the expectation of the utilityU(t, v) ∈ M if v ∈ W ,
E[U(t, v) ∈ M ] ≥ �m+n4 �
|WΔ| − 1× |TΔ|
mnE[MaxSum(OPT )]
Theorem 1. The competitive ratio of the TGOA algorithm underrandom order model is 1
4 .Proof. Let Uv be the utility contributed by v in the finalmatch M . According to Lemma 5, v can represent eithera worker or a task. Thus, we have
E[
m+n∑v=1
Uv] =
m+n∑v=1
E[Uv]
=1
2
m+n∑v=1
(E[U(v, w) ∈ M ] + E[U(t, v) ∈ M ]
)

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
7
Algorithm 3: Greedy-Matchinput : A bipartite graphoutput: An offline allocation MGdy
v
1 MGdyv ← ∅;
2 while True do3 (t, w) ← a feasible pair of tasks and workers
with the highest utility that is unmatched;4 if (t, w) exists then MGdy
v ← MGdyv ∪ {(t, w)};
5 else break ;
6 return MGdyv ;
In addition, in the online random order model, an arbitraryorder must have a corresponding symmetrical order. Inother words, if a newly arrived item v is a task, there mustbe an item with the same arrival order that is a worker.Therefore, we have
E[MaxSum(M)] =1
2E[
m+n∑v=1
Uv]
≥ 1
2· 12
m+n∑v=�m+n
2�(
�m+n4
�|WΔ| − 1
· |TΔ|
mnE[MaxSum(OPT )]+
�m+n4
�|TΔ| − 1
· |WΔ|
mnE[MaxSum(OPT )])
≥ 1
2
m+n∑i=�m+n
2�
m+n4
mnE[MaxSum(OPT )]
=�m+n
4�
2mn(m+ n− �m+ n
2�+ 1)E[MaxSum(OPT )]
≥ 1
2· (1− 1
2)E[MaxSum(OPT )]
Therefore, E[MaxSum(M)] ≥ 14E[MaxSum(OPT )].
5.2 TGOA-Greedy Algorithm
Basic Idea. Although the TGOA algorithm adopts a moreoptimal strategy on the second half of vertices, it is inef-ficient because it takes cubic time complexity to find thecurrent global optimal match for each vertex in the second-half. To improve the efficiency, we replace the optimalHungarian algorithm with a greedy strategy, which leadsto a slightly lower competitive ratio.
Algorithm Details. We replace the Hungarian algorithmwith the greedy strategy as illustrated in Algo. 3. In lines3-5, we iteratively add an unmatched edge with the highestutility into Mv if such an edge exits. If no such edgeexists, MGdy
v is returned. In line 12 of Algo. 2, TGOAwill find the hypothetical match Mv . Thus, TGOA-Greedyis similar to TGOA, except that line 12 is replaced by“Mv ← Greedy-Match(TΔ ∪WΔ ∪ {v})”.Example 4. Based on the 1st arrival order in TABLE 2,TGOA-Greedy yields the same result as TGOA for the first halfof vertices. For the second half of vertices, TGOA-Greedy alsoassigns t3 and t4 to w3. Thus, the total utility of TGOA-Greedyis 7+9+1=17 as well.Complexity Analysis. For each task or worker in the firsthalf, the time and space complexities of TGOA-Greedy arethe same as TGOA. For each task or worker in the secondhalf, we implement Algo. 3 by using a heap. Thus, its timeand space complexities are O(|TΔ||WΔ| log(|TΔ||WΔ|))and O(max(|TΔ|2, |WΔ|2)), respectively.
Competitive Analysis. The TGOA-Greedy algorithm fol-lows the framework of Algo. 2, except that line 12 callsAlgo. 3 instead of the Hungarian algorithm. The greedystrategy affects MGdy
v when v arrives at the platform. Hencewe have the following lemma and theorem.Lemma 6. E[MaxSum(MGdy
v )] ≥ |TΔ||WΔ|2mn
E[MaxSum(OPT )]
Proof. Please see our supplemental materials [22].
Theorem 2. The competitive ratio of TGOA-Greedy under therandom order model is 1
8 .
Proof. Please see our supplemental materials [22].
5.3 TGOA-OP Algorithm
Although TGOA-Greedy is faster than TGOA, it has a worsecompetitive ratio. Thus, we propose TGOA-OP to improvethe efficiency while retaining the same competitive ratio.
Basic Idea. The basic idea of TGOA-OP is to keep removingthe tasks and workers whose deadlines have passed, suchthat the number of available task and workers is muchsmaller than the total number of tasks and workers.
Algorithm Details. We simply remove workers/taskswhose deadlines have passed after line 21 of TGOA inAlgo. 2. That is, we remove workers/tasks from WΔ andTΔ whose deadlines are earlier than the current time.
Complexity Analysis. WLOG denote T and W as a setof tasks and a set of workers, which have the maximumcardinality among all iterations. For each task/worker in thefirst half, the time and space complexities of TGOA-OP areboth O(max(|T |, |W|)). For each task/worker in the secondhalf, the time and space complexities of TGOA-OP areO(max(|T |3, |W|3)) and O(max(|T |2, |W|2)), respectively.Since |T | � |T | and |W| � |W | in practice, the efficiencyof TGOA-OP is better than TGOA and TGOA-Greedy.
Competitive Analysis. After removing unavailable tasksand workers, the input of bipartite for Hungarian algorithmwill be changed, i.e., line 12 of Algo. 2. Although the finalallocation M may change, the competitive ratio is still 1
4 .Theorem 3. The competitive ratio of TGOA-OP under therandom order model is 1
4 .
Proof. Both Lemma 2 and Lemma 3 still hold since theoptimal allocation should satisfy the deadline constraint.
We next prove that Lemma 4 still holds. If v ∈ T , theset T
′= {t�m+n
4 �+1, · · · , t|TΔ|−1} will be refined since weremove the tasks whose deadlines are passed. WLOG the setT
′changes into {tk, · · · , t|TΔ|−1}, where k ≥ �m+n
4 � + 1.With the same reason in Lemma 4, we have
Pr(w is unmatched in steps [�m+ n
2�+ 1, |TΔ| − 1]
)
≥|TΔ|−1∏j=k
j − 1
j=
k − 1
|TΔ| − 1≥ �m+n
4 �|TΔ| − 1
Similarly, we obtain the same result in Lemma 4 if w ∈ W .Since both Lemma 3 and Lemma 4 still hold, the
Lemma 5 (based on Lemma 3 and Lemma 4) and Theorem 1(based on Lemma 5) also hold.

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
8
Algorithm 4: Greedy
input : T,W,U(., .)output: A feasible allocation M
1 foreach newly arrived task or worker v do2 Cand ← {∀u|u is an unmatched neighbor of v
and satisfies all constraints};3 if Cand is not empty then4 u∗ ← the element with the largest U(u, v) is
chosen from Cand;5 M ← M ∪ {(u∗, v)};
6 remove workers/tasks whose deadlines havepassed;
7 return M ;
6 GREEDY ALGORITHM REVISITED
Greedy has been considered as an ineffective algorithm interms of the competitive ratio under the adversarial ordermodel for the OMWBM problem [10], [12], [13], [14], [44],i.e., a special case of our GOMA problem. However, recentexperimental studies show that Greedy performs well inonline task assignment with other objectives, e.g., maximiz-ing the total number of assigned tasks [41] or minimizingthe total travel cost of the workers [34]. Thus, it remainsopen how Greedy performs on average for the GOMA problemand we are motivated to revisit the Greedy algorithm inthe following. Specifically, we review Greedy and its worst-case performance under the adversarial order model inSec. 6.1. We then analyze its competitive ratio under therandom order model in Sec. 6.2, which shows its average-case performance.
6.1 Greedy Algorithm
Basic Idea. The basic idea of Greedy is to assign each newvertex to its unmatched neighbor with the highest utilitysuch that all constraints are satisfied.Algorithm Details. Algo. 4 presents the procedure ofGreedy. In line 2, we select all unmatched neighbors of thenew vertex v as a candidate set. In lines 3-5, we greedilyassign the neighbor with the highest utility to v if feasible.In line 6, we safely remove tasks/workers whose deadlineshave expired.
Example 5. Back to our running example in Example 1. It isthe same situation where the threshold of Extended Greedy-RTequals 0. According to the 1st arrival order in TABLE 2, when w1
arrives, the candidate set Cand = {t1, t2}, and the algorithmchooses t1. Similarly, t3 and t4 are assigned to w2 and w3,respectively. Greedy obtains a total utility of 10.
Complexity Analysis. For each newly arrived task orworker, the time and space complexities of Greedy are bothO(max(|T |, |W|)).Competitive Analysis under Adversarial Order Model.
Theorem 4. The competitive ratio of Greedy is unbounded underthe adversarial order model.
Proof. Suppose there are two edges with utilities of ε andUmax in the bipartite graph, and they have a common end-point. In the worst-case order, Greedy first meets the edge
with utility of ε and then chooses it, while it fails to matchthe edge with utility of Umax. Meanwhile OPT achievesa final utility score of Umax. Thus, the competitive ratioof Greedy is at most ε
Umaxunder adversarial order model,
which is unbounded since ε can be arbitrarily small.
As mentioned in Sec. 4, we focus on the average per-formance of an algorithm to the GOMA problem since theworst-case instance rarely occurs in practice. Despite itsunbounded competitive ratio under the adversarial ordermodel, Greedy can be still useful if it has reasonable com-petitive ratios under the random order model, which wewill analyze in detail below.
6.2 Competitive Ratio Analysis
In this subsection we analyze the competitive ratio ofGreedy under the random order model by assuming dif-ferent distributions of utilities between tasks and workers.We focus on three widely used distributions, i.e., uniform,exponential and normal, since they can approximate theutilities between tasks and workers [15], [45], [46].
6.2.1 Analysis Under Uniform Distribution
Assume that all the utilities of edges in the bipartite graphfollow the uniform distribution, we analyze the competitiveratio of Greedy under the random order model. Let Xi be arandom variable representing the utility between v and thei-th neighbor in the candidate set Cand (line 2 of Greedy)and let p denote the size of Cand. Then, all the randomvariables X1, · · · , Xp are independent and uniformly dis-tributed in [0, Umax]. Let X∗ denote the highest utility inline 4 of Greedy, i.e., X∗ = max{X1, X2, . . . , Xp}.
Theorem 5. If the utilities follow the uniform distribution, thecompetitive ratio of Greedy is 1
2 (1 − 1e ) under the random order
model.
Proof. With respect to each random variable Xi, the cumu-lative distribution function (CDF for short) is defined by
F (x) = Pr(Xi ≤ x) =x
Umax, x ∈ [0, Umax] (3)
Thus, the CDF with respect to X∗ is defined by
F ∗(x) = Pr(X1 ≤ x) · Pr(X2 ≤ x) · · ·Pr(Xp ≤ x) = [F (x)]p
Then we can obtain the probability density function bycalculating the derivative of CDF with respect to x,
f∗(x) = p[F (x)]p−1 · f(x) = pxp−1
(Umax)p(4)
Hence the expected value of X∗ is calculated by the integra-tion with respect to the probability density function.
E[X∗] =∫ Umax
0xf∗(x) dx =
p
p+ 1Umax ≥ 1
2Umax (5)
Since [43] proves that E[|M |] ≥ (1 − 1e )E[|OPT |] under
the random order model, we can bound the expected totalutility of Greedy as follows.
E[MaxSum(M)] ≥ (1− 1
e)E[|OPT |] · 1
2Umax (6)

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
9
Since the expected total is at most E[|OPT |] ·Umax, we have
CRRO =E[MaxSum(M)]
E[MaxSum(OPT )]≥ 1
2(1− 1
e) ∼ 0.32
6.2.2 Analysis Under Exponential DistributionSimilar to the analysis in Sec. 6.2.1, we assume that eachrandom variable Xi follows an exponential distributionwith parameter λ. Then we have the following conclusionon the competitive ratio of Greedy.
Theorem 6. If the utilities follow the exponential distribution(with parameter λ), the competitive ratio of Greedy is (1 − 1
e ) ·1
λUmaxunder the random order model.
For example, if we let 1/λ equals to 0.5Umax, the ratio isasymptotic to (1− 1
e ) · 12 ∼ 0.32.
Proof. Similarly, the CDF with respect to Xi is defined by
F (x) = Pr(Xi ≤ x) =1− e−λx
1− e−λUmax, x ∈ [0, Umax] (7)
Similar to Eq. (4), we have the probability density function:
f∗(x) = p[F (x)]p−1 · f(x) = p · ( 1− e−λx
1− e−λUmax
)p−1 · λe−λx
=pλe−λx
(1− e−λUmax)p−1
p−1∑k=0
(p− 1
k
)(−e−λx)k
=1
(1− e−λUmax)p−1
p−1∑k=0
(−1)kp
(p− 1
k
)λ(e−λx)k+1
(8)
By substituting p(p−1
k
)= (k+1)
( pk+1
)into Eq. (8), we have
f∗(x) =1
(1− e−λUmax)p−1
p−1∑k=0
(−1)k(k + 1)
(p
k + 1
)λ(e−λx)k+1
= − 1
(1− e−λUmax)p−1
p∑k=1
(−1)k(p
k
)kλ(e−kλx) (9)
Similar to Eq. (5), the expectation of X∗ (i.e., E[X∗]) iscalculated as follows.
− 1
(1− e−λUmax)p−1
p∑k=1
(−1)k(p
k
)∫ Umax
0
kλx(e−kλx) dx
= − 1
(1− e−λUmax)p−1
p∑k=1
(−1)k(p
k
)1
kλ(10)
Since the p-th Harmonic number [47] (denoted by Hp) canbe calculated as Hp = −∑p
k=1 (−1)k(pk
)1k , we have
E[X∗] =Hp
λ(1− e−λUmax)p−1≥ 1
λ(11)
Based on the same reason of Eq. (6), we can bound theexpected total utility of Greedy as follows:
E[MaxSum(M)] ≥ (1− 1
e)E[|OPT |] · 1
λ(12)
Since the expected total utility is at most E[|OPT |] · Umax,we have
CRRO =E[MaxSum(M)]
E[MaxSum(OPT )]≥ (1− 1
e)
1
λUmax
TABLE 3: Real datasets.Platform |T | |W | cw δw rw pt duegMission 713 532 1,2,3,4,5 0.8 1 10.45 5
EverySender 4036 817 1,2,5,10,20 0.6 1 5.24 10
TABLE 4: Synthetic datasets.Parameter Setting
|T | 500, 1000, 2500, 5000, 10000|W | 100, 200, 500, 1000, 5000cw 1, 2, 3, 4, 5δw 0.1, 0.3, 0.5, 0.7, 0.9rw 1.0, 1.5, 2.0, 2.5, 3.0pt
(μ,mean, 1/λ) 2, 5, 10, 15, 20
due 2, 4, 6, 8, 10scalability 10K × 1K, 20K × 2K, 30K × 3K, 40K × 4K,(|T | × |W |) 50K × 5K, 60K × 6K, · · · , 100K × 10K
6.2.3 Analysis Under Normal DistributionSimilar to the analysis in Sec. 6.2.1, we assume that eachrandom variable Xi follows a normal distribution withparameter μ and σ. Then we have the following conclusionon the competitive ratio of Greedy.
Theorem 7. If the utilities follow the normal distribution(with parameter μ and σ), the competitive ratio of Greedy is(1− 1
e )μ
Umaxunder the random order model.
For example, if we let μ equals to 0.5Umax, the ratio isasymptotic to (1− 1
e ) · 12 ∼ 0.32.
Proof. Under the normal distribution with parameter μ andσ, [48] gives the lower bound of E[X∗] as follows.
E[x∗] ≥ μ+ 0.23σ√log p ≥ μ (13)
Since [43] proves that E[|M |] ≥ (1 − 1e )E[|OPT |] under
random order model, we can bound the expected totalutility of Greedy as follows
E[MaxSum(M)] ≥ (1− 1
e)E[|OPT |] · μ (14)
Since the expected total utility is at most E[|OPT |] · Umax,we have
CRRO =E[MaxSum(M)]
E[MaxSum(OPT )]≥ (1− 1
e)
μ
Umax
Note that the competitive ratio of Greedy under randomorder model is not arbitrarily bad. However, compared withTGOA-based algorithms (i.e., TGOA, TGOA-Greedy andTGOA-OP), its competitive ratio is sensitive to the distribu-tion of datasets. For example, under exponential and normaldistributions, the competitive ratio of Greedy is affected bythe mean of the utilities. Specifically, only when the mean islarger than 0.4Umax, the ratio of Greedy is better than TGOAand TGOA-OP. Though the competitive ratio of Greedyis better than the TGOA-based algorithms under uniformdistribution, the analysis of TGOA-based algorithms doesnot rely on the uniform distribution. Overall, the performanceof Greedy is not arbitrarily bad on average and may be lessstable than TGOA and TGOA-OP in experiments.
7 EXPERIMENTAL STUDY
This section presents the experimental evaluations of ourproposed algorithms.

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
10
|W|100 200 500 1000 5000
Util
ity0
1000
2000
3000
4000 Ext-GRT
TGOATGOA-OPTGOA-GreedyGreedyOPT
(a) Utility vs. |W | (#1)|W|
100 200 500 1000 5000
Util
ity0
1000
2000
3000 Ext-GRT
TGOATGOA-OPTGOA-GreedyGreedyOPT
(b) Utility vs. |W | (#2)|T|
500 1000 2500 5000 10000
Util
ity0
500
1000
1500
2000 Ext-GRT
TGOATGOA-OPTGOA-GreedyGreedyOPT
(c) Utility vs. |T | (#1)|T|
500 1000 2500 5000 10000
Util
ity50
010
0015
0020
0025
0030
00 Ext-GRTTGOATGOA-OPTGOA-GreedyGreedyOPT
(d) Utility vs. |T | (#2)
|W|100 200 500 1000 5000
Tim
e(se
cs)
0
50
100
150
200Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(e) Time vs. |W | (#1)|W|
100 200 500 1000 5000
Tim
e(se
cs)
020
0040
0060
0080
00
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(f) Time vs. |W | (#2)|T|
500 1000 2500 5000 10000
Tim
e(se
cs)
0
10
20
30
40Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(g) Time vs. |T | (#1)|T|
500 1000 2500 5000 10000
Tim
e(se
cs)
0
0.5
1
1.5
2
2.5Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(h) Time vs. |T | (#2)
|W|100 200 500 1000 5000
Mem
ory(
MB)
18
19
20
21
22Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(i) Memory vs. |W | (#1)|W|
100 200 500 1000 5000
Mem
ory(
MB)
18
18.5
19
19.5
20Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(j) Memory vs. |W | (#2)|T|
500 1000 2500 5000 10000
Mem
ory(
MB)
18
19
20
21Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(k) Memory vs. |T | (#1)|T|
500 1000 2500 5000 10000
Mem
ory(
MB)
17
18
19
20
21Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(l) Memory vs. |T | (#2)
Fig. 2: Results on varying |W | and |T | on synthetic datasets.
7.1 Experimental Setup
Datasets. We use two real datasets, the gMission dataset [49]and the EverySender dataset [50]. gMission is a research-based general spatial crowdsourcing platform. In the gMis-sion dataset, every task has a task description, a location, arelease time, a due time (minute) and payoff. Each worker isalso associated with a location, an available time, a due time(minute), the maximum activity range (km), and a successratio based on his/her historical records on completingtasks. EverySender is a spatial crowdsourcing expressageplatform on campus, where everyone on campus can postmicro-tasks, e.g., collecting packages, or conduct tasks asa worker. Similar to the gMission dataset, each task andworker in the EverySender dataset also includes its corre-sponding information. Since the capacity of workers (i.e.,cw) is not given in the datasets, we generate the capacity ofworkers. TABLE 3 presents the statistics of the real datasets.
We also use synthetic datasets for evaluation. The pa-rameter settings of the experiments are shown in TABLE 4,where the default parameters are marked in bold. To sim-ulate the cases when utilities follow certain distribution,we generate the values of pt following normal, uniformand exponential distributions. Specifically, we vary the pa-rameter μ,mean, 1/λ in the aforementioned distributions,respectively. For normal distribution, we set parameter σas 3.75 and only vary the value of μ, because μ tendsto have more influence on the performance (based on thecompetitive analysis in Theorem 7). The deadline is calcu-lated as the arrival time of a task/worker added by theparameter “due” in the table. We use two different waysto generate the locations of tasks and workers within a
square of 100 × 100 in the 2D coordinates. In one way, wetotally generate the locations in a random way as in ourpreliminary version [15]. In the other way, we first randomlygenerate the locations of workers and then dependentlygenerate the locations of tasks, i.e., we randomly samplethe locations within the circular regions of workers. Forsimplicity, we use Syn#1 and Syn#2 to denote the syntheticdatasets generated by these two ways. The main differenceis that a worker can perform fewer tasks in Syn#1 than Syn#2due to the range constraint. Furthermore, the arrival order ofall tasks and workers follows uniform distribution followingthe random order model.Metrics and Implementation. We evaluate the ExtendedGreedy-RT (denoted by “Ext-GRT”), TGOA, TGOA-Greedy,TGOA-OP and Greedy algorithms in terms of total utilityscore (utility for short), total running time (time for short)and memory cost (memory for short). We also present the re-sults of offline optimal solution (denoted by “OPT”). In eachexperiment, we repeatedly test 100 different online arrivalorders of tasks and workers and report the average results.All the algorithms are implemented in GNU C++, andthe experiments were performed on a server with Intel(R)Xeon(R) X5675 3.07GHz CPU and 128GB main memory.
7.2 Experiment ResultsWe first present the results on two synthetic datasets withvarious parameters, and then show the performance on tworeal datasets. Due to the space limit, some of the experimen-tal results are shown in our supplemental materials [22],including the results of varying capacity cw and successratio δw on Syn#1, varying radius rw and response deadlinedue on Syn#1 and Syn#2.

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
11
cw
1 2 3 4 5
Util
ity0
2000
4000
6000 Ext-GRT
TGOATGOA-OPTGOA-GreedyGreedyOPT
(a) Utility vs. cw (#2)w
0.1 0.3 0.5 0.7 0.9
Util
ity0
1000
2000
3000
4000
5000 Ext-GRT
TGOATGOA-OPTGOA-GreedyGreedyOPT
(b) Utility vs. δw (#2)
2 5 10 15 20
Util
ity0
1000
2000
3000
4000 Ext-GRT
TGOATGOA-OPTGOA-GreedyGreedyOPT
(c) Utility vs. μ (#1)
2 5 10 15 20
Util
ity010
0020
0030
0040
0050
0060
00 Ext-GRTTGOATGOA-OPTGOA-GreedyGreedyOPT
(d) Utility vs. μ (#2)
cw
1 2 3 4 5
Tim
e(se
cs)
0
5
10
15Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(e) Time vs. cw (#2)w
0.1 0.3 0.5 0.7 0.9
Tim
e(se
cs)
0
0.2
0.4
0.6
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(f) Time vs. δw (#2)
2 5 10 15 20
Tim
e(se
cs)
0
20
40
60
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(g) Time vs. μ (#1)
2 5 10 15 20
Tim
e(se
cs)
0
0.2
0.4
0.6
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(h) Time vs. μ (#2)
cw
1 2 3 4 5
Mem
ory(
MB)
18.2
18.4
18.6
18.8
19
19.2Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(i) Memory vs. cw (#2)w
0.1 0.3 0.5 0.7 0.9
Mem
ory(
MB)
18.3
18.4
18.5
18.6
18.7
18.8
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(j) Memory vs. δw (#2)
2 5 10 15 20
Mem
ory(
MB)
19
19.5
20
20.5Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(k) Memory vs. μ (#1)
2 5 10 15 20
Mem
ory(
MB)
18.3
18.4
18.5
18.6
18.7
18.8
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(l) Memory vs. μ (#2)
Fig. 3: Results on varying capacity cw, success ratio δw and normal distribution parameter μ on synthetic datasets.
Impact of cardinality of W . The results of varying |W | areshown in the first two columns of Fig. 2. The utility increasesas |W | increases, since there are more matched edges as |W |increases. TGOA, TGOA-Greedy and TGOA-OP return bet-ter matching results than the baseline Extended Greedy-RTdoes, which yield up to 169.58%, 93.21% and 170.13%more utility than the baseline. The utility of Greedy is upto 167.07% larger than the baseline Extended Greedy-RT.Greedy outperforms TGOA and TGOA-Greedy on Syn#1while Greedy is less effective than them on Syn#2. Sincethere are more tasks around a worker on Syn#2 with differ-ent payoff, Greedy may match the task which arrives firstyet with less payoff. However, the allocations by TGOA andTGOA-OP are relatively globally optimal. TGOA-Greedyreturns slightly worse utility than the other proposed al-gorithms. The time and memory costs of all the algorithmsincrease when |W | increases. Greedy is the most efficientand TGOA is the least efficient, which is aligned withtheir complexity analysis. TGOA-Greedy and TGOA-OP aremore efficient than TGOA in both time and memory costs.
Impact of cardinality of T . The results of varying |T | areshown in the last two columns of Fig. 2. The results are simi-lar to those when varying the cardinality of W . Again, all theproposed algorithms are better than Extended Greedy-RT.On Syn#1, Greedy performs the best, with up to 58.31%more utility than the baseline, followed by TGOA-OP,TGOA and TGOA-Greedy. On Syn#2, TGOA-OP and TGOAperform the best, with 148.20% higher utility in averagethan the baseline, followed by Greedy and TGOA-Greedy.TGOA-Greedy is still better than the baseline, with 49.01%and 46.9% higher utility in average on Syn#1 and Syn#2. In
terms of time and memory costs, Greedy is still the mostefficient and the TGOA is the least efficient. TGOA-Greedyand TGOA-OP are as efficient as Extended Greedy-RT, i.e.,the differences in time and space consumptions are less than40ms and 1.2MB in average.
Impact of capacity cw on Syn#2. The results of varying cware presented in the first column of Fig. 3. The total utility ofall algorithms increases when cw increases, since a workercan gradually perform more tasks. When the capacity cwis 5, TGOA, TGOA-OP and Greedy tend to obtain nearoptimal utility. Because there are 2500/500 = 5 tasks aroundeach worker in average, the workers with capacity 5 tend toperform the most of tasks. Compared with the baseline, ourproposed algorithms are much better, by at least 50.55%higher utility in average. As for the time and memory costs,we can observe similar patterns to other experiment results.
Impact of success ratio δw on Syn#2. The results of varyingthe success ratio of workers are presented in the secondcolumn of Fig. 3. The utility of all the algorithms increaseswith the increase of success ratio of workers. TGOA andTGOA-OP are the most effective algorithms, followed byGreedy, TGOA-Greedy and Extended Greedy-RT. As forrunning time, TGOA-OP and Greedy are the most effi-cient, followed by TGOA-Greedy and Extended Greedy-RT.TGOA is the least efficient. As for memory cost, all thealgorithms consume only a little space (i.e., less than 19MB).
Impact of parameter μ of normal distribution. The resultsof varying the utilities under normal distribution are shownin the last two columns of Fig. 3. In terms of utility, Greedyis the most effective in Syn#1 and is beaten by TGOAand TGOA-OP on Syn#2. All the proposed algorithms are

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
12
mean2 5 10 15 20
Util
ity0
2000
4000
6000 Ext-GRT
TGOATGOA-OPTGOA-GreedyGreedyOPT
(a) Utility vs. mean (#1)mean
2 5 10 15 20
Util
ity010
0020
0030
0040
0050
0060
00 Ext-GRTTGOATGOA-OPTGOA-GreedyGreedyOPT
(b) Utility vs. mean (#2)1/
2 5 10 15 20
Util
ity0
500
1000
1500
2000
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedyOPT
(c) Utility vs. 1/λ (#1)1/
2 5 10 15 20
Util
ity010
0020
0030
0040
0050
0060
00 Ext-GRTTGOATGOA-OPTGOA-GreedyGreedyOPT
(d) Utility vs. 1/λ (#2)
mean2 5 10 15 20
Tim
e(se
cs)
0
10
20
30
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(e) Time vs. mean (#1)mean
2 5 10 15 20
Tim
e(se
cs)
0
0.2
0.4
0.6
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(f) Time vs. mean (#2)
2 5 10 15 20
Tim
e(se
cs)
0
20
40
60
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(g) Time vs. 1/λ (#1)1/
2 5 10 15 20
Tim
e(se
cs)
0
0.2
0.4
0.6
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(h) Time vs. 1/λ (#2)
mean2 5 10 15 20
Mem
ory(
MB)
18.6
18.8
19
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(i) Memory vs. mean (#1)mean
2 5 10 15 20
Mem
ory(
MB)
18.3
18.4
18.5
18.6
18.7
18.8
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(j) Memory vs. mean (#2)1/
2 5 10 15 20
Mem
ory(
MB)
19
19.5
20
20.5Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(k) Memory vs. 1/λ (#1)1/
2 5 10 15 20
Mem
ory(
MB)
18.3
18.4
18.5
18.6
18.7
18.8
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(l) Memory vs. 1/λ (#2)
Fig. 4: Results on varying uniform distribution parameter mean and exponential distribution parameter 1/λ on syntheticdatasets.
still more effective than Extended Greedy-RT, with at least61.14% and 61.38% higher utility in average on the twodatasets. In terms of time and memory costs, Greedy is stillthe most efficient and TGOA is the least efficient.
Impact of parameter mean of uniform distribution. Theresults of varying the utilities under the uniform distri-bution are in the first two columns of Fig. 4. The trendof the utility when varying mean of uniform distributionis similar to that in the normal distribution. On Syn#1,TGOA-based algorithms and Greedy are close to the optimalresults. On Syn#2, TGOA and TGOA-OP have a notableimprovement over the other algorithms. Overall, all theproposed algorithms are more effective than the baseline.As for the time and memory costs, the patterns are similarto other experiment results.
Impact of parameter 1/λ of exponential distribution. Theresults of varying the utilities under exponential distribu-tion are shown in the last two columns of Fig. 4. In termsof utility, the TGOA-based algorithms and Greedy are moreeffective than the baseline. The ranks of all the algorithmsare similar to previous experiment results (e.g., Fig. 3c andFig. 3d). As for the time and memory costs, all the proposedalgorithms are efficient except that TGOA takes more run-ning time than others.
Scalability test. Since TGOA is not efficient enough ac-cording to our previous experiment results, we omit itsexperimental results. The results of scalability test areshown in the first two columns in Fig. 5. In terms ofutility, all the proposed algorithms outperform the baselineExtended Greedy-RT. For example, on Syn#2, TGOA-OP,
TGOA-Greedy and Greedy are up to 2.25x, 1.59x and 1.61xmore effective than the baseline Extended Greedy-RT. Asfor the running time on Syn#1 and Syn#2, Greedy is thefastest, by up to 10.06x faster than baseline. TGOA-OP isthe second fastest, by up to 9.35x faster than baseline. Eventhough TGOA-Greedy is slower than the baseline, it is stillefficient because each requests can be responded within10ms in average. As for the memory cost, all the algorithmsare efficient (i.e., less than 50MB).
Performance on real datasets. The last two columns ofFig. 5 show the results on real datasets. On EverySenderdataset, the increase of utility tends to be stable when cwbecomes greater than 5, because the total number of tasks isclosed to five times of total number of workers. On gMissiondataset, the utility still increases for Greedy and ExtendedGreedy-RT but drops a little bit for the TGOA-based al-gorithms when cw increases from 3 to 4. Since the totalcapacity of workers first becomes much larger than the totalnumber of tasks (when cw is 4), some of the workers may notperform as many tasks as possible due to globally optimalallocation of second phase in TGOA-based algorithms. Thetotal utility becomes stable when cw is larger than 4. Ourproposed algorithms obtain at least 31.82% higher utilitythan Extended Greedy-RT. In terms of time and memorycosts, Greedy is the most efficient, and TGOA-Greedy andTGOA-OP are as efficient as the baseline.
Summary of Results. We summarize our experimental find-ings as follows.
• TGOA is up to 169.58% more effective than the baselineExtended Greedy-RT at the cost of more time and space.

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
13
|T|,|W|(x104, x103)1 2 3 4 5 6 7 8 9 10
Util
ity
104
0
0.5
1
1.5
2
2.5Ext-GRTTGOA-OPTGOA-GreedyGreedy
(a) Utility (scalability#1)|T|,|W|(x104, x103)
1 2 3 4 5 6 7 8 9 10
Util
ity
104
0
1
2
3Ext-GRTTGOA-OPTGOA-GreedyGreedy
(b) Utility (scalability#2)
cw
1 2 5 10 20
Util
ity50
010
0015
0020
0025
00
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedyOPT
(c) Utility (EverySender)
cw
1 2 3 4 5
Util
ity12
0014
0016
0018
0020
0022
0024
00
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedyOPT
(d) Utility (gMission)
|T|,|W|(x104, x103)1 2 3 4 5 6 7 8 9 10
Tim
e(se
cs)
0
10
20
30
40
50Ext-GRTTGOA-OPTGOA-GreedyGreedy
(e) Time (scalability#1)|T|,|W|(x104, x103)
1 2 3 4 5 6 7 8 9 10
Tim
e(se
cs)
0
10
20
30
40Ext-GRTTGOA-OPTGOA-GreedyGreedy
(f) Time (scalability#2)
cw
1 2 5 10 20
Tim
e(se
cs)
010
020
030
040
0
Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(g) Time (EverySender)
cw
1 2 3 4 5
Tim
e(se
cs)
0
10
20
30
40Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(h) Time (gMission)
|T|,|W|(x104, x103)1 2 3 4 5 6 7 8 9 10
Mem
ory(
MB)
10
20
30
40
50Ext-GRTTGOA-OPTGOA-GreedyGreedy
(i) Memory (scalability#1)|T|,|W|(x104, x103)
1 2 3 4 5 6 7 8 9 10
Mem
ory(
MB)
15
20
25
30
35
40Ext-GRTTGOA-OPTGOA-GreedyGreedy
(j) Memory (scalability#2)
cw
1 2 5 10 20
Mem
ory(
MB)
18
19
20
21
22Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(k) Memory (EverySender)
cw
1 2 3 4 5
Mem
ory(
MB)
18.2
18.4
18.6Ext-GRTTGOATGOA-OPTGOA-GreedyGreedy
(l) Memory (gMission)
Fig. 5: Results on scalability tests on synthetic datasets and the performances on real datasets.
• TGOA-Greedy is less effective than TGOA while stillup to 93.21% more effective than the baseline. It sig-nificantly outperforms TGOA in terms of running timeand memory cost.
• TGOA-OP inherits the advantages of both TGOA andTGOA-Greedy, which is up to 170.13% more effectivethan baseline with low time and memory costs (e.g., upto 9.35x faster than baseline in scalability test).
• Greedy is the most efficient algorithm with up to167.07% higher utility than Extended Greedy-RT. How-ever, its effectiveness is sensitive to the distributions ofdatasets, e.g., it is most effective on Syn#1 but is lesseffective than TGOA and TGOA-OP on Syn#2.
• The results on real datasets show that though state-of-the-art algorithm (i.e., Extended Greedy-RT) has bettercompetitive ratio under adversarial order model, it doesnot perform well in practice.
8 CONCLUSION
In this paper, we first identify a new online micro-taskallocation problem, called Global Online Micro-task Allocationin spatial crowdsourcing (GOMA), which is more generalthan the Online Maximum Weighted Bipartite Matching(OMWBM) problem. Then, we extend the state-of-the-artGreedy-RT algorithm to the OMWBM problem as our base-line. Although the baseline has nearly optimal guaranteeunder the adversarial order model, it does not performwell enough in practice. Thus, we propose a two-phase-based framework under the random order model, whichis more suitable to reflect the average performance. Basedon this framework, we present the TGOA algorithm withcompetitive ratio of 1
4 , but is not scalable to large datasets.
To improve the scalability, we further design TGOA-Greedyand TGOA-OP, which runs faster with the competitive ratioof 1
8 and 14 . Finally, we analyze the average performance
of Greedy algorithm, which is considered as the ineffectivealgorithm due to its unbounded competitive ratio under theadversarial order model. We conduct extensive experimentswhich verify the effectiveness, efficiency and scalability ofthe proposed approaches. Based on our experimental re-sults, the Greedy algorithm is more effective than the state-of-the-art but is sensitive to the distribution of the datasets.TGOA-OP is as effective as TGOA but is more efficient.TGOA-OP is also more stable than Greedy.
REFERENCES
[1] L. Kazemi and C. Shahabi, “Geocrowd: enabling query answeringwith spatial crowdsourcing,” in GIS, 2012.
[2] “Gigwalk,” https://gigwalk.com/.[3] “TaskRabbit,” https://taskrabbit.com/.[4] “Waze,” https://www.waze.com/.[5] Y. Tong, L. Chen, and C. Shahabi, “Spatial crowdsourcing: Chal-
lenges, techniques, and applications,” PVLDB, 2017.[6] Y. Tong and Z. Zhou, “Dynamic task assignment in spatial crowd-
sourcing,” SIGSPATIAL Special, 2018.[7] L. Chen and C. Shahabi, “Spatial crowdsourcing: Challenges and
opportunities,” IEEE Data Eng. Bull., 2016.[8] R. E. Burkard, M. Dell’Amico, and S. Martello, Assignment Prob-
lems, Revised Reprint, 2009.[9] H. To, C. Shahabi, and L. Kazemi, “A server-assigned spatial
crowdsourcing framework,” ACM Trans. Spatial Algorithms andSystems, 2015.
[10] R. M. Karp, U. V. Vazirani, and V. V. Vazirani, “An optimalalgorithm for on-line bipartite matching,” in STOC, 1990.
[11] G. Aggarwal, G. Goel, C. Karande, and A. Mehta, “Online vertex-weighted bipartite matching and single-bid budgeted allocations,”in SODA, 2011.

1041-4347 (c) 2019 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TKDE.2019.2948863, IEEETransactions on Knowledge and Data Engineering
14
[12] Z. Huang, Z. G. Tang, X. Wu, and Y. Zhang, “Online vertex-weighted bipartite matching: Beating 1-1/e with random arrivals,”in ICALP, 2018.
[13] N. Korula and M. Pal, “Algorithms for secretary problems ongraphs and hypergraphs,” in ICALP, 2009.
[14] H. Ting and X. Xiang, “Near optimal algorithms for online max-imum edge-weighted b-matching and two-sided vertex-weightedb-matching,” Theor. Comput. Sci., 2015.
[15] Y. Tong, J. She, B. Ding, L. Wang, and L. Chen, “Online mobilemicro-task allocation in spatial crowdsourcing,” in ICDE, 2016.
[16] Y. Tong, L. Wang, Z. Zhou, B. Ding, L. Chen, J. Ye, and K. Xu,“Flexible online task assignment in real-time spatial data,” PVLDB,2017.
[17] D. Deng, C. Shahabi, and U. Demiryurek, “Maximizing the num-ber of worker’s self-selected tasks in spatial crowdsourcing,” inGIS, 2013.
[18] L. Zhang, T. Hu, Y. Min, G. Wu, J. Zhang, P. Feng, P. Gong,and J. Ye, “A taxi order dispatch model based on combinatorialoptimization,” in KDD, 2017.
[19] J. P. Dickerson, K. A. Sankararaman, A. Srinivasan, and P. Xu,“Allocation problems in ride-sharing platforms: Online matchingwith offline reusable resources,” in AAAI, 2018.
[20] B. Zhao, P. Xu, Y. Shi, Y. Tong, Z. Zhou, and Y. Zeng, “Preference-aware task assignment in on-demand taxi dispatching: An onlinestable matching approach,” in AAAI, 2019.
[21] D. Gao, Y. Tong, J. She, T. Song, L. Chen, and K. Xu, “Top-k teamrecommendation and its variants in spatial crowdsourcing,” DataScience and Engineering, 2017.
[22] “Full paper,” http://home.cse.ust.hk/∼yzengal/goma.pdf .[23] A. Mehta, “Online matching and ad allocation,” Foundations and
Trends in Theoretical Computer Science, 2013.[24] H. Hu, G. Li, Z. Bao, J. Feng, Y. Wu, Z. Gong, and Y. Xu, “Top-k
spatio-textual similarity join,” IEEE Trans. Knowl. Data Eng., 2016.[25] N. Ta, G. Li, Y. Xie, C. Li, S. Hao, and J. Feng, “Signature-based
trajectory similarity join,” IEEE Trans. Knowl. Data Eng., 2017.[26] Y. Tong, L. Chen, Z. Zhou, H. V. Jagadish, L. Shou, and W. Lv,
“SLADE: A smart large-scale task decomposer in crowdsourcing,”IEEE Trans. Knowl. Data Eng., 2018.
[27] J. Fan, G. Li, B. C. Ooi, K.-l. Tan, and J. Feng, “iCrowd: An adaptivecrowdsourcing framework,” in SIGMOD, 2015.
[28] G. Li, C. Chai, J. Fan, X. Weng, J. Li, Y. Zheng, Y. Li, X. Yu, X. Zhang,and H. Yuan, “CDB: A crowd-powered database system,” PVLDB,2018.
[29] G. Li, J. Wang, Y. Zheng, and M. J. Franklin, “Crowdsourced datamanagement: A survey,” IEEE Trans. Knowl. Data Eng., 2016.
[30] H. Hu, Y. Zheng, Z. Bao, G. Li, J. Feng, and R. Cheng, “Crowd-sourced POI labelling: Location-aware result inference and taskassignment,” in ICDE, 2016.
[31] S. R. B. Gummidi, X. Xie, and T. B. Pedersen, “A survey of spatialcrowdsourcing,” ACM Trans. Database Syst., 2019.
[32] Y. Zeng, Y. Tong, L. Chen, and Z. Zhou, “Latency-oriented taskcompletion via spatial crowdsourcing,” in ICDE, 2018.
[33] H. To, C. Shahabi, and L. Xiong, “Privacy-preserving online taskassignment in spatial crowdsourcing with untrusted server,” inICDE, 2018.
[34] Y. Tong, J. She, B. Ding, L. Chen, T. Wo, and K. Xu, “Onlineminimum matching in real-time spatial data: Experiments andanalysis,” PVLDB, 2016.
[35] Y. Tong, L. Wang, Z. Zhou, L. Chen, B. Du, and J. Ye, “Dynamicpricing in spatial crowdsourcing: A matching-based approach,” inSIGMOD, 2018.
[36] Q. Tao, Y. Zeng, Z. Zhou, Y. Tong, L. Chen, and K. Xu, “Multi-worker-aware task planning in real-time spatial crowdsourcing,”in DASFAA, 2018.
[37] Y. Tong, Y. Zeng, Z. Zhou, L. Chen, J. Ye, and K. Xu, “A unifiedapproach to route planning for shared mobility,” PVLDB, 2018.
[38] N. Ta, G. Li, T. Zhao, J. Feng, H. Ma, and Z. Gong, “An efficientride-sharing framework for maximizing shared route,” IEEE Trans.Knowl. Data Eng., 2018.
[39] U. ul Hassan and E. Curry, “A multi-armed bandit approach toonline spatial task assignment,” in UIC, 2014.
[40] J. P. Dickerson, K. A. Sankararaman, A. Srinivasan, and P. Xu,“Assigning tasks to workers based on historical data: Online taskassignment with two-sided arrivals,” in AAMAS, 2018.
[41] Y. Li, J. Fang, Y. Zeng, B. Maag, Y. Tong, and L. Zhang, “Two-sided online bipartite matching in spatial data: Experiments andanalysis,” GeoInformatica, 2019.
[42] Y. Wang and S. C.-w. Wong, “Two-sided online bipartite matchingand vertex cover: Beating the greedy algorithm,” in ICALP, 2015.
[43] G. Goel and A. Mehta, “Online budgeted matching in randominput models with applications to adwords,” in SODA, 2008.
[44] Z. Huang, N. Kang, Z. G. Tang, X. Wu, Y. Zhang, and X. Zhu,“How to match when all vertices arrive online,” in STOC, 2018.
[45] L. Kazemi, C. Shahabi, and L. Chen, “Geotrucrowd: trustworthyquery answering with spatial crowdsourcing,” in GIS, 2013.
[46] T. Song, Y. Tong, L. Wang, J. She, B. Yao, L. Chen, and K. Xu,“Trichromatic online matching in real-time spatial crowdsourc-ing,” in ICDE, 2017.
[47] “Harmonic number,” https://en.wikipedia.org/wiki/Harmonicnumber.
[48] G. Kamath, “Bounds on the expectation of the maximum ofsamples from a gaussian,” http://www.gautamkamath.com/writings/gaussian max.pdf , 2015.
[49] “gMission,” http://gmission.github.io/.[50] “EverySender,” http://www.dajiasong.com/.
Yongxin Tong received the Ph.D. degree incomputer science and engineering from theHong Kong University of Science and Technol-ogy in 2014. He is currently an associate profes-sor in the School of Computer Science and Engi-neering, Beihang University. His research inter-ests include crowdsourcing, big spatio-temporaldata processing, uncertain data mining andmanagement and social network analysis. He isa member of the IEEE.
Yuxiang Zeng is currently working toward thePh.D. degree in the Department of ComputerScience and Engineering, Hong Kong Universityof Science and Technology. His major researchinterests are crowdsourcing and spatio-temporaldata management.
Bolin Ding received the Ph.D. degree in Com-puter Science at University of Illinois at Urbana-Champaign, USA, in 2012. He is currently aresearcher in the Data Analytics and IntelligenceLab (DAIL) at Alibaba DAMO Academy. Hisresearch interests center on large-scale datamanagement and analytics, including interac-tively querying and mining “big” data, privacy-preserving data analytics, and optimizations indatabases and machine learning.
Libin Wang is currently a Master candidate inthe School of Computer Science and Engineer-ing, Beihang University. His major research in-terests are crowdsourcing and spatio-temporaldata management.
Lei Chen received the B.S. degree in computerscience and engineering from Tianjin University,China, in 1994, the M.A. degree from the AsianInstitute of Technology, Thailand, in 1997, andthe Ph.D. degree in computer science from theUniversity of Waterloo, Canada, in 2005. He isnow a professor at the Department of ComputerScience and Engineering, Hong Kong Universityof Science and Technology. His current researchinterests include crowdsourcing-based data pro-cessing and data-driven machine learning. He is
a member of the IEEE.
















![Locality-aware allocation of multi-dimensional correlated ...yongxintong.group/static/paper/2015/DAPD2015... · Distrib Parallel Databases proposed in [1,2], which quickly map the](https://img.pdfslide.net/doc/110x75/5fb5e0a8f5ac0301a5705b64/locality-aware-allocation-of-multi-dimensional-correlated-distrib-parallel-databases.jpg)