Embed Size (px)
Citation preview

GRID SCHEDULING USING VARIOUS PERFORMANCE MEASURES
– A COMPARATIVE STUDY
1Dr.K.Vivekanandan,
2D.Ramyachitra
1Professor, BSMED, Bharathiar University, Coimbatore
E mail: [email protected]
2Assistant Professor, School of Computer Science and Engineering, Bharathiar University, Coimbatore
E mail: [email protected]
ABSTRACT
Grid Computing, an extension of distributed computing, allows sharing of geographically
distributed resources across multiple administrative domains. As the users can access the
resources transparently without knowing where they are physically located, there are many
challenges that have to be considered. One of the challenges involves scheduling the jobs to
the appropriate resources. This paper gives a survey on scheduling algorithms used in grid
environment. The algorithms have been implemented using gridsim, a simulator used for
creating a grid environment. Various performance measures such as makespan, resource
utilization, cost and profit are used for comparing the algorithms.
Keywords:MET, MCT, Max Min, Min Min, OLB, GA, Tabu Search, SA, Grid, Scheduling.
1 NTRODUCTION
A Computational Grid is a collection of
heterogeneous resources such as computational
devices, networks, online instruments, storage
archives etc that provides an enormous potential of
capabilities that can be brought to bear on large
distributed applications and are becoming prevalent
platforms for high performance and resource intensive
applications [1]. In the current networking technology
and based on the availability of the bandwidth, the
computing resources are aggregated together to form a
grid computing environment. These computational
resources which provide free or chargeable services
may consists of one or more processing elements of
same or different technologies [2]. Data Grids are
predicted to be the solution to the large computational
power and data storage requirements of many research
projects. It also enables the sharing of distributed
computational and storage resources among users
located all over the world [3]. Traditional approaches
maintain a centralized server or hierarchically
organized servers to index the resource information.
Centralized system has all the functional software
components on a single computer but centralized
servers becomes a problem in the case of highly
dynamic environment where many resources join,
leave and change characteristics at any time and also
it does not scale to large number of grid nodes across
autonomous organizations. As grid computing is a
form of distributed computing, where the resources
are geographically distributed, centralized form of
systems will be a bottleneck for grid computing.
Hierarchical approaches provide better scalability and
fault tolerance but it takes a long time for resource
information to be updated from the leaf nodes to the
root node [4]. For peer to peer architecture single
point of failure does not exist, but in the case of
centralized system, if the centralized hub is broken, it
will lead to failure of the entire system. For grid
UbiCC Journal, Volume 6: Issue 3 864
Ubiquitous Computing and Communication Journal (ISSN 1992-8424)

computing, communication topology is required
because it deals with different computers in different
geographical locations. Even though there is a
communication overhead in the case of grid
computing, several computers with unutilized
resources in different geographical locations are used
to solve a single large problem so that overall
computational power is enhanced.
One of the characteristic of the grid is users no
need to have idea where the required resource for
solving their problem is located. Users also no need to
care about the resources they use when their jobs are
running. From the viewpoint of the resources, they do
not need to give a permit to each user to access them
directly but only tasks which have limited access
rights can be allowed to be executed [5]. As grid
involves heterogeneity which arises mainly from the
large variety of resources available within each
category, the Grid resource broker hides the
complexities of the grid computing environment from
a user. This grid resource broker discovers resources
that the user can access using information services,
negotiates for access costs; maps application jobs to
resources, starts the execution process and monitors
the progress of execution [6]. These heterogeneous
resources are managed using metadata, whose
purpose is to provide information about the features of
resources and their effective use. Meta data can
provide information regarding which resources are
available, how resources can be accessed, when they
will be available etc. So, metadata can represent a key
element for the discovery and utilization of resources
on the grid [7]. Apart from hiding the heterogeneity of
the resources, another interesting characteristic is the
transparent pooling of many kinds of resources such
as computing power, storage, data and services. This
enables the applications deployed on the grid to
transparently share resources and also the ability to
allocate and reserve virtualized resources. This
virtualization facilitates sharing of resources and also
allows the preservation of QoS for time critical
applications [8].
Grid computing can be used for applications that
can be split and sent to different resources for
execution. After completion of the execution, the
results can be concatenated and analyzed. There are
many policies for sending the jobs based upon their
characteristics. This will result in efficient utilization
of the idle resources. There is no single point of
failure. If one of the resources gets failed, other will
get over it. It is so scalable and upgrading can be done
on the fly. The split up jobs can also be run in parallel
with high speed on many nodes. MPI can also be used
for message passing among computer resources.
These features make grid computing attractive for the
enterprises also. This enterprise grid computing
reflects the use of grid computing within the context
of a business or enterprise rather than for scientific
applications. Stateful nature of business applications,
the typical underlying multi-tier architecture where
request execution follows a complex path through a
diverse set of components etc makes these enterprise
applications harder to deploy on a Grid infrastructure
[8].
As grid environments include many servers
across various administrative domains, managing and
utilizing those resources and keeping configurations
in synchronization will be challenging in large
environments. Simulation is the only feasible way to
analyze algorithms on large scale distributed systems
as in grid environment. Simulation works well by
making the analysis system simple by avoiding the
overhead of co-ordination of real resources compared
to using the real system in real time environment.
Gridsim toolkit allows modeling and simulation of
entities in grid computing users , applications,
resources and resource brokers for design and
evaluation of scheduling algorithms. Some of the
features of gridsim includes modeling of
heterogeneous types of resources, resource capability
can be defined in the form of MIPS, resources can be
located in any time zone, advance reservation can be
made for the resources, submission of unlimited
number of applications for the execution, network
speed between the resources can be specified etc [9].
The remaining part of the paper is organized as
follows. Section 2 deals with scheduling in grid
environment. Section 3 shows the comparison of the
scheduling algorithms’ using simulation results and
finally section 4 gives the conclusion.
2 SCHEDULING IN GRID ENVIRONMENT
Scheduling is the process of allocation of tasks to
the appropriate resources. Before scheduling the tasks
UbiCC Journal, Volume 6: Issue 3 865
Ubiquitous Computing and Communication Journal (ISSN 1992-8424)

to the resources, the sequence of tasks in which the
execution will be performed and the time duration of
each activity should also be determined. Job shop
scheduling is one of the most well known online
problems and the basic models were developed with
makespan as the objective. Makespan is the time
taken by a given set of resources to execute a
sequence of tasks. Scheduling algorithms at the
beginning were developed with an objective of
minimization of the makespan.
During 1960’s mathematical programming such
as integer and dynamic programming has been applied
to job shop scheduling problems. But as job shop
scheduling problems are NP Complete problems, it is
not possible to find the exact schedule. So many
researchers proposed new techniques and heuristics
that give optimal schedule which was better compared
to scheduling using mathematical programming.
Dispatching rules or heuristics have been applied to
scheduling problems which is classified into different
classes according to the performance criteria for
which they have been applied [10]. Class 1 contains
simple priority rules based on processing times,
deadlines, slack and arrival time. Class 2 contains
combinations of rules from class 1. Class 3 contains
rules that are referred to as Weight Priority Indexes.
Even though a considerable number of works studied
on the above said rules, most of the work concentrated
on processing time i.e., makespan. Performance
measures other than makespan that were optimized
were deadline, tardiness, throughput and utilization.
Some research works developed optimization
measures on the resource provider’s side also. Apart
from these performance measures, other Quality of
Service includes cost for resource consumer,
reliability of the resource, income, profit for resource
provider etc. This paper has compared several
algorithms using the QoS such as makespan, cost,
income and profit.
In general scheduling algorithms can be classified
into local and global scheduling [11]. Processes are
assigned to the time slices of a single processor in the
case of local scheduling. Decision has to be taken
where to execute the process in the case of global
scheduling. Global scheduling uses information about
the system to allocate processes to multiple processors
and obviously grid scheduling falls into the global
scheduling branch [12]. Global scheduling can be
either static or dynamic. In static scheduling, all the
information regarding tasks and resources should be
known before the execution starts. In the case of
dynamic scheduling, task is allocated on the fly as the
application executes. Both static and dynamic
scheduling is adopted in grid computing depending
upon the application and the available information.
Some of the heuristics such as OLB, MET, MCT, Min
min, Max min, Duplex, Genetic Algorithm, SA, Tabu
Search, A* [13], ACO , PSO etc are widely adopted
for scheduling in grid environment and are discussed
here.
Opportunistic Load Balancing (OLB) assigns
each to the machine that is available in an arbitrary
order and it does not consider the expected execution
time on that machine. In Minimum Execution Time
(MET), the task is assigned in an arbitrary manner to
the machine with the best expected execution time for
the task, regardless of the availability of the machine.
Minimum Completion Time (MCT) assigns each task
in arbitrary order to the machine with the minimum
expected completion time for that task. Min min is
based on the MCT but Min min considers all
unmapped tasks during each mapping decision and
MCT only considers one task at a time. In Max min,
the task with maximum completion time is allocated
to the machine that has minimum completion time.
Duplex performs both Min min and Max min and uses
the better solution [13]. Genetic algorithm is an
evolutionary technique for large space search. It
operates on a population of solutions rather than on a
single solution. Much work has been done using GA
for grid scheduling [14]. A set of chromosomes are
initialized and the fitness is calculated for the
chromosomes. Good chromosomes are selected,
crossover is performed and mutation is done. This
process is repeated until a good mapping is
performed. Simulated annealing is an iterative
technique like genetic algorithm but only considers
one possible solution for each task at a time. It
probabilistically allows poorer solutions to be
accepted and this probability is based on a system
temperature that decreases for each iteration. Initial
temperature is the makespan of the initial mapping.
Then the mapping is mutated and the temperature is
reduced by certain percentage and the makespan is
found out. This process is iterated until an optimum
solution is got. Tabu search(TS) explores the search
space of all feasible solutions by a sequence of moves.
It performs a number of iterations and at each
iteration, TS moves to the best solution that is not
UbiCC Journal, Volume 6: Issue 3 866
Ubiquitous Computing and Communication Journal (ISSN 1992-8424)

forbidden and thus independent of local optima. A* is
a search technique based on a µ-ary tree, beginning at
a root node that is a null solution. The nodes in the
tree represent partial mapping and these partial
mappings has one more task mapped than the parent
node. Each parent node generates children and
becomes inactive. The tree is pruned to make the
execution time traceable. When a node is added, the
tree is pruned by deactivating the leaf node with the
largest makespan of the partial solution. This process
continues until a leaf node representing a complete
mapping is reached [13].
3 COMPARISON USING SIMULATION
The scheduling algorithms have been tested using
Gridsim, a simulator for the grid environment.
Consistent and inconsistent resources as well as
heterogeneity between the tasks and resources are
used for testing the algorithms. Heterogeneity in tasks
is variation in size between the tasks and in resources;
it is variation in speed between them. Table 1 shows
the comparison of various scheduling algorithms for
low heterogeneity tasks and low heterogeneity
consistent resources, table 2 shows the results for low
heterogeneity tasks and high heterogeneity resources,
table 3 shows the results for high heterogeneity tasks
and low heterogeneity resources and finally table 4
shows the results for high heterogeneity tasks and
high heterogeneity resources. In table 1, the processor
speed ranges from 0.10MIPS to 0.29MIPS for 1024 x
32 matrix, 0.1MIPS to 0.224MIPS for 512 x 16
matrix, 0.1MIPS to 0.25MIPS for 256 x 8 matrix and
0.1MIPS to 0.24MIPS for 128 x 4 matrix. Here, the
speed of the processors differs from 0.01MIPS to
0.19MIPS for 1024 x 32 matrix, 0.001MIPS to
0.15MIPS for 512 x 16 matrix, 0.01MIPS to
0.15MIPS for 256 x 8 matrix and 0.04MIPS to
0.14MIPS for 128 x 4 matrix. Various performance
measures such as makespan, resource utilization, cost
and profit has been used for comparing the
algorithms.
Makespan is found out using
for n number of jobs and m number of
machines, where C[i] is the completion time of a job
i.From table 1, it is seen that the performance of MET
is not good compared to other algorithms with respect
to all the performance measures. Makespan is high,
resource utilization is poor, the cost of using it is also
high and the profit obtained out of it also is very less.
The results for various resource matrices 128 tasks x 4
resources, 256 tasks x 8 resources, 512 tasks x 16
resources, 1024 tasks x 32 resources shows that MET
does not perform as well as other algorithms. This
performance can be seen from the results of the table
7 and table 8, where only one resource that has the
highest speed is utilized whereas other resources are
not utilized. OLB performs slightly better compared
to MET in terms of makespan and resource utilization.
The cost incurred is also less for OLB compared to
MET and profit obtained for OLB is better compared
to MET. This is because, in OLB, the machines that
are available are considered for allocation of tasks to
the machines. Max min, Min min and MCT
performance with respect to makespan and resource
utilization are more or less similar. GA , Tabu and SA
performs better and time taken by these algorithms is
less than 25% compared to all the above algorithms
for various resource matrices and resource utilization
is also more than 50%. The reason for less time taken
by the algorithms GA, Tabu and SA is all the
resources are more or less utilized in an average
manner. This performance can be seen from the
results of tables 2 also. Table 3 shows the results of
scheduling algorithms using consistent resources for
high heterogeneity in tasks and low heterogeneity in
resources. Here, OLB takes more time compared to
other algorithms and this may be due to high
heterogeneity in size of the tasks. Tables 5 and 6
shows the results of scheduling algorithms using
inconsistent resources. Here also, OLB takes more
time for execution of all the tasks compared to other
algorithms. In the case of inconsistent resources, the
speed of a resource is not constant for all the tasks it
executes and it changes randomly between the tasks.
Tables 7 show the individual resource utilization for
consistent resources. It is seen from the table that for
low heterogeneity tasks, some of the resources for
Max Min, Min Min and MCT algorithms are not
utilized, for MET only single resource that has the
highest speed is utilized, but for GA, Tabu and SA, all
the resources are utilized. As the speed of a resource
varies between the tasks, all the resources are utilized
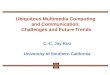
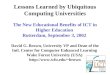
for all the algorithms. Figures 1 to 11 shows the
pictorial comparison of all the algorithms.
UbiCC Journal, Volume 6: Issue 3 867
Ubiquitous Computing and Communication Journal (ISSN 1992-8424)

Scheduling
algorithm
Resource
Matrix
Makespan
(ms)
Resource
Utilization(%) Cost (Rs.) Profit (Rs.)
MET
128 x 4
214155 9.02 5655 13195
OLB 172288 18.11 3892.59 14957
Max – Min 136604 16.03 5185.15 13664.85
Min –Min 137146 15.72 2072.94 16777.059
MCT 134933 15.86 5187.95 13662.05
GA 43760 68.67 4048.57 14796.63
TABU 44040 68.18 440.40 3963.60
SA 46160 66.86 4138.65 15159.74
MET
256 x 8
422477 4.63 8107.89 30501.11
OLB 298776 10.33 8509.73 30099.27
Max – Min 263171 7.46 9843 28766
Min –Min 263544 7.39 4729.475 33879.525
MCT 263716 7.37 9873.51 28735.49
GA 44240 70.42 8541.34 30056.55
TABU 46120 67.55 461.20 4150.80
SA 46476 67.57 8515.73 30081.96
MET
512 x 16
835115 2.32 16035.18 60322.819
OLB 554619 5.26 17927.92 58430.075
Max – Min 520090 3.86 19469.039 56888.96
Min –Min 521897 3.87 9048.098 67309.902
MCT 521998 3.89 19440.33 56917.67
GA 45160 64.54 17712.32 58615.56
TABU 46890 59.25 984.69 3704.31
SA 48670 60.25 17705.06 58641.44
MET
1024 x 32
1574416 1.08 23103.89 130922.1
OLB 1068390 2.51 33685.08 120340.92
Max – Min 1030180 1.63 27030.594 126995.405
Min –Min 1030251 1.63 22333.769 131692.23
MCT 1030579 1.63 27051.40 126974.598
GA 45509 59.25 33514.54 120427.57
TABU 44130 60.79 1323.90 3089.10
SA 45674 58.85 33426.08 120376.31 Table. 1 Performance comparison of scheduling algorithms using consistent resources for low
heterogeneity tasks and low heterogeneity resources
Scheduling
algorithm
Resource
Matrix
Makespan
(ms)
Resource
Utilization(%) Cost (Rs.)
Profit
(Rs.)
MET
128 x 4
162539 3.81 7539.99 11310
OLB 144258 9.57 4840.4 14009.6
Max – Min 134909 4.09 6600.3 12249.7
Min –Min 135194 4.20 7256.41 11593.59
MCT 135119 3.96 6605.9 12244.1
GA 29590 49.08 5005.59 13818.45
TABU 31257 47.91 937.71 3750.84
SA 28841 50.107 5000.05 13826.42
MET 256 x 8 316146 1.82 3860.9 34748.1
UbiCC Journal, Volume 6: Issue 3 868
Ubiquitous Computing and Communication Journal (ISSN 1992-8424)

OLB 289870 8.40 8352.38 30256.62
Max – Min 263977 2.07 8295.069 30313.93
Min –Min 263636 2.30 15153.394 23455.605
MCT 263886 2.04 8373.04 30235.96
GA 88140 28.73 8500.34 30066.37
TABU 96280 27.30 962.80 3851.20
SA 93440 27.54 8524.95 30059.36
MET
512 x 16
613820 0.84 19089.5 57268.5
OLB 559846 3.87 14871.6889 61486.311
Max – Min 520982 0.96 17830.418 58527.5819
Min –Min 522346 0.86 34838.15 4151.8599
MCT 525856 0.93 17840.945 58517.055
GA 113025 19.09 5041.09 61403.78
TABU 118025 18.35 141.63 4579.37
SA 112025 19.20 14787.43 61472.4
MET
1024 x 32
1459203 0.88 46207.79 107818.20
OLB 1051922 1.24 30216.24 123809.758
Max – Min 1279819 0.95 38513.40 115512.599
Min –Min 1288136 2.48 22330.879 131695.120
MCT 1284228 0.96 38467.85 115558.15
GA 48285 28.18 29490.48 39922.44
TABU 51208 26.72 46.09 4562.63
SA 52107 26.45 29358.95 124628.81 Table 2 Performance comparison of scheduling algorithms using consistent resources for low
heterogeneity tasks and high heterogeneity resources
Scheduling
algorithm
Resource
Matrix
Makespan
(ms)
Resource
Utilization(%) Cost (Rs.) Profit (Rs.)
MET
128 x 4
3880766 24.07 268352.09 626154.90
OLB 5113812 25.09 204296.55 690210.45
Max – Min 1898531 63.53 224420.3 670086.7
Min –Min 2304391 51.06 92482.245 802024.755
MCT 3262297 42.88 194271.599 700235.4
GA 1938757 64.43 219516.81 674984.92
TABU 2305957 48.24 166028.9 387400.78
SA 3129511 45.39 194109.51 700393.58
MET
256 x 8
7484688 12.02 377329.88 1419479.11
OLB 8664125 15.27 351807.69 1445001.31
Max – Min 2225282 55.67 420123.31 1376685.68
Min –Min 5541282 26.90 151009.95 1645799.05
MCT 2907328 42.99 452693.55 1344115.45
GA 2266728 56.02 418039.74 1378759.28
TABU 6128712 12.44 198570.27 536875.17
SA 2519668 51.27 287936.65 1345575.56
MET
512 x 16
7970094 5.83 389804.73 1466408.26
OLB 9250594 8.11 424681.035 1431531.965
Max – Min 2226797 27.35 431989.34 1424223.652
Min –Min 4418719 15.99 162751.122 1693461.87
MCT 2738828 21.57 427949.85 1428263.15
GA 2354960 27.54 437389.14 1418792.89
UbiCC Journal, Volume 6: Issue 3 869
Ubiquitous Computing and Communication Journal (ISSN 1992-8424)

TABU 3212140 19.53 `128838.94 484679.8
SA 2333864 25.27 434205.31 1357046.95
MET
1024 x 32
12647516 2.87 504720.44 2860082
OLB 14406703 3.98 675408.861 2689394.13
Max – Min 2303109 18.76 711705.40 2653097.598
Min –Min 4978312 9.82 379995.305 2984807.695
MCT 2537031 15.63 705748.263 2659054.73
GA 2318479 20.46 729954.02 2634764.97
TABU 3332178 15.92 439423.70 1025321.98
SA 2696481 20.27 756135.12 2670361.54 Table 3 Performance comparison of scheduling algorithms using consistent resources for high
heterogeneity tasks and low heterogeneity resources
Scheduling
algorithm
Resource
Matrix
Makespan
(ms)
Resource
Utilization(%) Cost (Rs.) Profit (Rs.)
MET
128 x 4
695314 20.17 178398.4 267597.6
OLB 152393 10.12 4890.4499 13959.55
Max – Min 332308 71.80 137410.90 308585.1
Min –Min 714637 40.64 133536.659 312459.34
MCT 425172 58.68 131669.50 314326.5
GA 318895 76.325 137384.07 308494.46
TABU 762741 42.34 22882.23 91528.92
SA 694739 44.11 127048.58 318917.42
MET
256 x 8
3942846 11.67 298031.6 2682284.4
OLB 12732685 13.96 746916.669 2233399.33
Max – Min 2347847 31.87 472019.379 2508296.62
Min –Min 4174881 23.81 747866.54 2232449.46
MCT 4071218 22.95 645159.48 2335156.52
GA 2385458 37.35 465104.28 2515170.82
TABU 5692421 24.165 461086.10 41449774.91
SA 9110100 14.44 469720.71 2510525.67
MET
512 x 16
8325021 5.86 1793097 5379291
OLB 8526668 7.05 1498694.768 5673693.232
Max – Min 6181945 8.77 1737850.466 5434537.534
Min –Min 6482455 7.98 1857856.23 5347676.67
MCT 6519620 7.54 1726440.364 5445947.636
GA 6178605 14.40 1649616.19 5522631.89
TABU 7732511 12.58 603909.11 5435181.98
SA 27122721 7.28 2213584.76 4958678.28
MET
1024 x 32
4400751 2.39 979892.99 2286417
OLB 3190903 8.51 646476.81 2619833.18
Max – Min 1031158 11.71 686496.57 2579813.42
Min –Min 1397532 10.08 1479460.41 1786849.58
MCT 1073271 10.19 671482.305 2594827.695
GA 725923 34.538 644928.78 2621080.31
TABU 1690028 19.38 45546.25 140356.83
SA 922670 28.83 619216.77 2627355.22 Table 4 Performance comparison of scheduling algorithms using consistent resources for high
heterogeneity tasks and high heterogeneity resources
Scheduling Resource Makespan Resource Cost (Rs.) Profit (Rs.)
UbiCC Journal, Volume 6: Issue 3 870
Ubiquitous Computing and Communication Journal (ISSN 1992-8424)

algorithm Matrix (ms) Utilization(%)
MET
128 x 4
147860 3.82 4119.6 14730.4
OLB 188031 14.99 3976.55 14873.45
Max – Min 140235 31.33 4145.34 14704.65
Min –Min 153515 7.68 3877.3 14972.7
MCT 148922 6.48 4049.29 14800.7
GA 10962 94.77 11637.53 18239.73
TABU 11126 89.84 2160.98 3821.93
SA 10446 93.23 11306.73 16083.28
MET
256 x 8
275282 2.14 8640.77 29968.23
OLB 2574657 12.03 8592.38 30016.62
Max – Min 262484 7.80 8784.32 29824.68
Min –Min 263547 2.16 8462.16 30146.83
MCT 262625 1.90 8145.44 30463.56
GA 11342 87.69 30053.6 15053.79
TABU 13917 81.43 2477.78 1635.20
SA 12030 86.47 29564.4 15610.46
MET
512 x 16
523093 0.88 17981.58 58376.41
OLB 840437 5.59 17283.22 59074.77
Max – Min 526516 6.76 17695.15 58662.84
Min –Min 518453 0.99 17901.78 58456.22
MCT 518094 0.88 17576.33 58781.662
GA 12523 86.96 48507.83 34162.31
TABU 13137 85.83 9535.8 3654.64
SA 12487 71.38 48642.87 35811.2
MET
1024 x 32
1034484 0.44 33519.42 120506.58
OLB 1165657 2.77 33623.71 120402.28
Max – Min 1030047 3.07 33611.97 120414.02
Min –Min 1030109 0.48 33744.819 120281.181
MCT 1030266 0.44 33642.17 120383.82
GA 13270 84.66 131978.52 88504.52
TABU 14070 81.28 4099.86 1739.19
SA 14197 83.43 139052.32 96023.78 Table 5 Performance comparison of scheduling algorithms using inconsistent resources for low
heterogeneity tasks
Scheduling
algorithm
Resource
Matrix
Makespan
(ms)
Resource
Utilization(%) Cost (Rs.) Profit (Rs.)
MET
128 x 4
1081344 23.92 229105.6 665401.4
OLB 3126406 24.56 145151.60 749355.39
Max – Min 567141 57.84 195582.3 698924.7
Min –Min 847547 38.48 225574.69 668932.3
MCT 719656 49.30 219846.45 674660.55
GA 454623 70.54 222395.9 466477.65
TABU 1771476 36.05 648961.13 1147758.68
SA 700102 48.56 221234.97 800757.16
MET
256 x 8
1560797 14.15 300485.24 1496323.76
OLB 3373360 14.66 298103.26 1498705.74
Max – Min 589000 66.17 419947.11 1376861.89
UbiCC Journal, Volume 6: Issue 3 871
Ubiquitous Computing and Communication Journal (ISSN 1992-8424)

Min –Min 3067328 20.86 389669.33 1407139.66
MCT 743078 38.54 449502.08 1347306.92
GA 755001 49.79 1014982.4 750375.83
TABU 1740652 23.96 169084.57 815115.19
SA 1320677 28.01 2314509.38 176405.65
MET
512 x 16
1747219 6.56 398947.56 1457265.43
OLB 4801890 7.05 459938.89 1396274.10
Max – Min 2127859 13.84 419777.74 1436435.25
Min –Min 1632328 10.31 422842.51 1433370.48
MCT 1036578 10.90 358612.471 1497600.52
GA 531628 36.02 878863.56 547907.17
TABU 1303488 16.22 202318.77 19903.12
SA 773794 31.63 1166248.24 601501.78
MET
1024 x 32
2864813 3.47 698004.23 2666798.76
OLB 6951562 3.92 732777.02 2632025.97
Max – Min 6509391 5.66 796115.65 2568687.34
Min –Min 1695610 6.01 742257.79 2622545.20
MCT 1310531 7.69 637659.57 2727143.42
GA 620573 27.62 1924807.93 1611180.62
TABU 3037900 8.12 1295783.10 636772.85
SA 1603407 13.25 2998679.22 1888930.15 Table 6 Performance comparison of scheduling algorithms using inconsistent resources for high
heterogeneity tasks
ResUtil (l-l
heterogeneity) MET OLB
Max-
Min
Min-
Min MCT GA Tabu SA
R1 0.0 31.40 0.0 0.0 0.0 100 40.08 44.25
R2 0.0 19.54 0.0 0.0 0.0 77.22 51.36 54.24
R3 36.09 11.93 29.66 28.76 28.77 48.72 67.75 68.94
R4 0.0 9.56 34.45 34.11 34.66 64.41 100 100
ResUtil (l-h
heterogeneity) MET OLB
Max-
Min
Min-
Min MCT GA Tabu SA
R1 15.25 3.37 7.82 7.98 7.61 20.51 19.03 21.26
R2 0.0 17.60 0.0 0.0 0.0 100.0 100 22.91
R3 0.0 4.25 8.555 8.82 8.24 22.72 19.88 56.26
R4 0.0 13.06 0.0 0.0 0.0 53.09 52.73 100
ResUtil (h-l
heterogeneity) MET OLB
Max-
Min
Min-
Min MCT GA Tabu SA
R1 0.0 11.25 51.11 40.22 26.72 62.84 10.52 3.66
R2 0.0 30.31 51.68 33.71 98.34 62.57 27.42 36.14
R3 96.29 1.50 99.67 95.89 19.87 100 55.04 41.79
R4 0.0 57.30 51.68 34.43 26.58 32.34 100 100
ResUtil (h-h
heterogeneity) MET OLB
Max-
Min
Min-
Min MCT GA Tabu SA
R1 80.66 3.7 66.25 33.72 33.98 71.05 16.95 16.75
R2 0.0 21.11 88.52 83.33 85.86 100 19.62 41.07
R3 0.0 4.81 66.72 22.15 70.9 64.62 33.59 18.63
R4 0.0 11.24 65.71 23.36 43.97 69.63 100 100 Table 7 Performance comparison of scheduling algorithms using individual resource utilization for consistent
resources for 128 x 4 resource matrixes.
UbiCC Journal, Volume 6: Issue 3 872
Ubiquitous Computing and Communication Journal (ISSN 1992-8424)

ResUtil (low
heterogeneity
tasks) MET OLB
Max-
Min
Min-
Min MCT GA Tabu SA
R1 3.02 16.69 32.16 5.80 3.91 89.02 67.88 80.12
R2 3.40 16.01 15.48 4.12 3.20 100 97.27 96.89
R3 3.34 19.26 18.44 3.66 3.86 98.72 100 95.94
R4 5.52 8.00 59.25 17.13 14.95 91.34 94.24 100
ResUtil (high
heterogeneity
tasks) MET OLB
Max-
Min
Min-
Min MCT GA Tabu SA
R1 19.91 54.95 43.22 19.11 57.97 35.41 5.08 30.11
R2 9.71 8.71 43.03 24.53 20.34 91.46 6.67 100
R3 63.69 28.87 45.92 8.34 91.21 55.30 32.45 52.05
R4 2.35 5.71 99.17 23.94 27.67 100 100 12.10 Table 8 Performance comparison of scheduling algorithms using individual resource utilization for
inconsistent resources for 128 x 4 resource matrixes.
Fig. 1 : Comparison of scheduling algorithms using consistent
resources and makespan for low heterogeneity tasks and low
heterogeneity resources
Fig. 2 : Comparison of scheduling algorithms using consistent
resources and resource utilization for low heterogeneity tasks
and low heterogeneity resources
Fig. 3 : Comparison of scheduling algorithms using consistent
resources and cost for low heterogeneity tasks and low
heterogeneity resources
Fig. 4 : Comparison of scheduling algorithms using consistent
resources and profit for low heterogeneity tasks and low
heterogeneity resources
UbiCC Journal, Volume 6: Issue 3 873
Ubiquitous Computing and Communication Journal (ISSN 1992-8424)

Fig. 5 : Comparison of scheduling algorithms using consistent
resources and makespan for low heterogeneity tasks and high
heterogeneity
resources
Fig. 6 : Comparison of scheduling algorithms using consistent
resources and resource utilization for low heterogeneity tasks
and high heterogeneity resources
Fig. 7 : Comparison of scheduling algorithms using consistent
resources and cost for low heterogeneity tasks and high
heterogeneity resources
Fig. 8 : Comparison of scheduling algorithms using consistent
resources and profit for low heterogeneity tasks and high
heterogeneity resources
Fig. 9 : Comparison of scheduling algorithms using consistent
resources and makespan for high heterogeneity tasks and low
heterogeneity resources
010203040506070
12
8,4
25
6,8
51
2,1
6
10
24
,32
R
e
s
U
t
l
%
Resource Matrix
MET
OLB
Max - Min
Min - Min
MCT
GA
TABU
SA
UbiCC Journal, Volume 6: Issue 3 874
Ubiquitous Computing and Communication Journal (ISSN 1992-8424)

Fig. 10 : Comparison of scheduling algorithms using consistent
resources and resource utilization for high heterogeneity tasks
and low heterogeneity resources
0500000
1000000150000020000002500000
C
o
s
t
Resource Matrix
MET
OLB
Max -MinMin -MinMCT
GA
Fig. 11: Comparison of scheduling algorithms using consistent
resources and cost for high heterogeneity tasks and low
heterogeneity resources
4 CONCLUSION
Scheduling is one of the important challenges in
grid computing environment as resources are
geographically distributed over multiple administrative
domains. So, there is a need to find a good schedule,
automate the scheduling process and to build a flexible
and scalable scheduling mechanism. This paper has
given a survey on grid scheduling algorithms
implemented using gridsim. Performance measures
such as makespan, resource utilization, cost and profit
are used for comparing the algorithms. The limitations
of scheduling algorithms has been clearly depicted by
individual resource utilization. From the results, it is
seen that the resources are not utilized in a fair manner.
Some resources are not at all utilized, whereas some
resources are utilized to the maximum. Rescheduling
of the tasks to the resources may result in better
makespan.
REFERENCES
[1] Francine Berman et al: Adaptive Computing on
the Grid Using AppLeS, IEEE Trans. On Parallel
and Distributed Systems, vol. 14, no. 4, (April
2003).
[2] Ravin Ahuja, G.Gabrani and Asok De: A
Dynamic Priority Scheduler for Advance
Reservation in Grid Computing, International
Journal of Soft Computing., 4(2): 60-67, (2009).
[3] D.G. Cameron et al: Analysis of Scheduling and
Replica Optimisation Strategies for Data Grids
Using OptorSim, Journal of Grid Computing., 2:
57-69, (2004).
[4] Min Cai et al: MAAN: A Multi-Attribute
Addressable Network for Grid Information
Services, Journal of Grid Computing., 2: 3-14,
(2004).
[5] Seung-Hyun Kim et al: Workflow – Based
Authorization Services in the Grid, Journal of
Grid Computing., 2: 43-55, (2004).
[6] Anthony Sulistio, Chee Shin Yeo, and Rajkumar
Buyya: Visual Modeler for Grid Modeling and
Simulation (GridSim) Toolkit., ICCS 2003, LNCS
2659, pp. 1123 – 1132, (2003).
[7] Carlo Mastroianni, Domenico Talia and Paolo
Trunfio: Metadata for Managing Grid Resources
in Data Mining Applications, Journal of Grid
Computing., 2: 85-102, (2004).
[8] R.Jimenez-Peris, M.Patino-Martinez, B.Kemme:
Enterprise Grids: Challenges Ahead, Journal of
Grid Computing 5: 283-294, (2007).
[9] Rajkumar Buyya, and Manzur Murshed:
GridSim: a toolkit for the modeling and
simulation of distributed resource management
and scheduling for Grid computing, Concurrency
and Computation: Practice and Experience.,
14:1175-1220, (2002).
[10] Albert Jones, Luis C. Rabelo: Survey of Job Shop
Scheduling Techniques, Technical Report,
NISTIR, National Institute of Standards and
Technology., Gaithersburg, (1998).
[11] T.Casavant and J.Kuhl: A Taxonomy of
scheduling in General –purpose Distributed
Computing Systems, IEEE Trans. On Software
Engineerin.,, vol. 14, no. 2, pp. 141 – 154, (Feb
1988).
[12] Fangpeng Dong, Selim G. Akl: Scheduling
Algorithms for Grid Computing: State of the Art
and Open PrOLBems., Technical Report No.
2006-504, (Jan 2006).
[13] R.Braun et al: A Comparison of Eleven Static
Heuristics for Mapping a Class of Independent
Tasks onto Heterogeneous Distributed
Computing Systems, J. of Parallel and
Distributed Computing., vol. 61, no. 6, pp. 810-
837, (2001).
[14] Vincenzo Di Martino: SubOptimal Scheduling in
a Grid using Genetic Algorithms, Parallel and
Nature Inspired Computational Paradigms and
Applications., Elsevier Science Publishers pp:
553-565, (2004)
UbiCC Journal, Volume 6: Issue 3 875
Ubiquitous Computing and Communication Journal (ISSN 1992-8424)