Embed Size (px)
Citation preview

Underconstrained jammed packings of nonspherical hard particles: Ellipses and ellipsoids
Aleksandar Donev,1,2 Robert Connelly,3 Frank H. Stillinger,4 and Salvatore Torquato1,2,4,5,*1Program in Applied and Computational Mathematics, Princeton University, Princeton New Jersey 08544, USA
2PRISM, Princeton University, Princeton, New Jersey 08544, USA3Department of Mathematics, Cornell University, Ithaca, New York 14853, USA
4Department of Chemistry, Princeton University, Princeton, New Jersey 08544, USA5Princeton Center for Theoretical Physics, Princeton University, Princeton, New Jersey 08544, USA
�Received 16 August 2006; published 10 May 2007�
Continuing on recent computational and experimental work on jammed packings of hard ellipsoids �Donevet al., Science 303, 990 �2004�� we consider jamming in packings of smooth strictly convex nonspherical hardparticles. We explain why an isocounting conjecture, which states that for large disordered jammed packings
the average contact number per particle is twice the number of degrees of freedom per particle �Z=2df�, doesnot apply to nonspherical particles. We develop first- and second-order conditions for jamming and demon-strate that packings of nonspherical particles can be jammed even though they are underconstrained �hypocon-
strained, Z�2df�. We apply an algorithm using these conditions to computer-generated hypoconstrained ellip-soid and ellipse packings and demonstrate that our algorithm does produce jammed packings, even close to thesphere point. We also consider packings that are nearly jammed and draw connections to packings of deform-able �but stiff� particles. Finally, we consider the jamming conditions for nearly spherical particles and explainquantitatively the behavior we observe in the vicinity of the sphere point.
DOI: 10.1103/PhysRevE.75.051304 PACS number�s�: 45.70.�n, 05.20.�y, 61.20.�p
I. INTRODUCTION
Jamming in disordered hard-sphere packings has beenstudied intensely in the last few years �1–3�, and recentlypackings of nonspherical particles have been investigated aswell �4,5�. Computer simulations and experiments performedfor packings of hard ellipsoids in Ref. �4� showed that asphe-ricity, as measured by the deviation of the aspect ratio �from unity, dramatically affects the properties of jammedpackings. In particular, it was observed that for frictionlessparticles the packing fraction �density� at jamming �J and
the average coordination �contact� number per particle Z in-crease sharply from the typical sphere values �J�0.64 and
Z=6 when moving away from the sphere point �=1. If one
views �J and Z as functions of the particle shape, they havea cusp �i.e., they are nondifferentiable� minimum at thesphere point.
It has been argued in the granular materials literature thatlarge disordered jammed packings of hard frictionlessspheres are isostatic �6–8�, meaning that the total number ofinterparticle contacts �constraints� equals the total number ofdegrees of freedom and that all of the constraints are �lin-early� independent. This property implies that the averagenumber of contacts per particle is equal to the number of
degrees of freedom per particle Z=2d in the limit as thenumber of particles gets large. This prediction has been veri-fied computationally with very high accuracy �2,3�. Most ofthe previous discussions of isostaticity have been restrictedto systems of spheres �6,7�, frictional systems �9�, or systemsof deformable particles �10�. For a general hard frictionlessparticle shape, the obvious generalization of the arguments
that have been used for hard frictionless spheres would pro-duce the expectation Z=2df, where df is the number of de-grees of freedom per particle �df =2 for disks, df =3 for el-lipses, df =3 for spheres, df =5 for spheroids, and df =6 forgeneral ellipsoids�. Although it has already been noted inRef. �8� that the arguments for isostaticity only rigorouslyapply to perfectly spherical systems, this does not appear tobe widely appreciated, and there appears to be a wide-spread
expectation that Z�2df for large disordered jammed pack-ings of hard frictionless particles. We refer to this expecta-tion as the isocounting conjecture, since it is based on theexpectation that the total number of �independent� con-straints equals the total number of degrees of freedom, thatis, that the packings are isoconstrained. We have referred tothis conjecture in the past as the isostatic conjecture �4�;however, here we give a more mathematically precise mean-ing to the term “isostatic,” as explained in Sec. IV.
Since df increases discontinuously with the introductionof rotational degrees of freedom as one makes the particles
nonspherical, the isocounting conjecture would predict that Zwould have a jump at �=1. Such a discontinuity was notobserved in Ref. �4�; rather, it was observed that ellipsoid
packings are hypoconstrained, Z�2df near the sphere point,and only become close to being isoconstrained for large as-pect ratios �but still remain hypoconstrained�. These findingssupport the theoretical predictions in Ref. �8� that, in general,systems of nonspherical particles would be hypoconstrainedand that the properties of packings should depend mildly onthe exact particle shape.
The isocounting conjecture, as expressed by several ofour colleagues, appears to be based on several wrong as-sumptions arising because of the use of linearization in thetreatment of the interparticle impenetrability constraints.Reference �8� terms this linearization as the “approximation*Electronic address: [email protected]
PHYSICAL REVIEW E 75, 051304 �2007�
1539-3755/2007/75�5�/051304�32� ©2007 The American Physical Society051304-1

of small displacements” �ASD�. First, it has been stated thata hypoconstrained packing cannot be rigid �jammed� due tothe existence of floppy modes �10�, which are unjammingmotions �mechanisms� derived within a linear theory of ri-gidity. Additionally, various force-based arguments havebeen given �9� without realizing that forces themselves arefirst-order Lagrange multipliers and do not necessarily existwhen one considers perfectly hard particles outside of thelinear �first-order� approximation. Reference �8� states thatthe ASD approximation is “indispensable if one wishes todeal with linear problems … In the case of granular systems,it will also lead to a linearization of the problems, for thecurvature of configuration spaces will be ignored.” The ob-servation that terms of order higher than first need to beconsidered is emphasized in Ref. �8�: “When floppy modesexist …, they appear as marginally unstable and one cannottell whether, to higher orders, they actually destabilize theequilibrium configuration.” However, the mathematicalanalysis extending beyond the ASD is not developed exceptfor spheres �8�. If the curvature of the particles at the point ofcontact is included in a second-order approximation �still forinfinitesimally small displacements�, then it can be seen thathypoconstrained packings of nonspherical hard packings canin fact be rigid, jammed, or stable �these terms are defined inSec. IV�. One does not need to consider particle deformabil-ity, friction, large displacements, or stability under a specificapplied load such as gravity, in order to see why packings ofnonspherical particles are generally hypoconstrained.Through the second-order mathematical analysis it will be-come clear that preexisting �internal� stresses inside thepacking are essential, as already realized in Ref. �10�. Whilethis prestress is merely a mathematical tool for static pack-ings of perfectly hard frictionless particles, for realistic sys-tems particle deformability, history of preparation, and ap-plied loads all bear a strong influence on the internal stressesin the packing and thus the mechanical properties of the sys-tem.
In this paper, we generalize our previous theoretical andcomputational investigations of jamming in sphere packings�2,11� to packings of nonspherical particles and, in particular,packings of hard ellipsoids. We generalize the mathematicaltheory of rigidity of tensegrity frameworks �12,13� to pack-ings of nonspherical particles, and demonstrate rigorouslythat the computer-generated ellipsoid packings we studied inRef. �4� are jammed even very close to the sphere point.Armed with this theoretical understanding of jamming, wealso obtain a quantitative understanding of the cusplike be-
havior of �J and Z around the sphere point. Specifically, wedo the following.
�i� Explain why the isocounting conjecture does not applyto nonspherical particles.
�ii� Develop first- and second-order conditions for jam-ming, and demonstrate that packings of nonspherical par-ticles can be jammed even though they are hypoconstrained.
�iii� Design an algorithm that uses the jamming conditionsto test whether computer-generated hypoconstrained ellip-soid and ellipse packings are jammed, and demonstrate nu-merically that our algorithm does produce jammed packings,even close to the sphere point.
�iv� Study the thermodynamics of packings that are nearlyjammed and draw connections to packings of deformable�but stiff� particles.
�v� Develop first-order expansions for nearly sphericalparticles and explain quantitatively the behavior we observein the vicinity of the sphere point.
A. Random jammed packings of hard ellipsoids
The packing-generation algorithm we employ generalizesthe Lubachevsky-Stillinger �LS� sphere-packing algorithm�14� and is described in detail in Ref. �15�. The method is ahard-particle molecular dynamics �MD� algorithm for pro-ducing dense disordered packings. Initially, small particlesare randomly distributed and randomly oriented in a boxwith periodic boundary conditions and without any overlap.The particles are given velocities �including angular veloci-ties� and their motion followed as they collide elastically andalso expand uniformly. As the density approaches the jam-ming density, the collision rate diverges. In the jamminglimit, the particles touch to form the contact network of thepacking, exerting compressive forces on each other but notbeing able to move despite thermal agitation �shaking�. If therate of particle growth, or expansion rate �, is initially suffi-ciently large to suppress crystallization, and small enoughclose to jamming to allow for local relaxation necessary fortrue jamming, the final packings are disordered and represen-tative of the maximally random jammed �16� �MRJ� state�17� �corresponding to the least ordered among all jammedpackings�.
Note that the computational methodology presented inRef. �2� applies to ellipsoids as well and we do not repeat thedetails presented there. The ellipsoid packings produced bythe algorithm do not show signs of local or global crystalli-zation. The exact phase diagram for hard ellipsoids is notknown and, in particular, it is not known what the high-density crystal phase is �18�; however, it is expected thatnematic ordering is present at high densities. The producedpackings do not show �global� nematic order to within sta-tistical accuracy �4,19�. A more detailed analysis of the local�translational and orientational� correlations in truly jammedellipsoid packings has not been performed to our knowledge,however, based on our experience with spheres we expectour algorithm to supress crystallization under appropriateconditions �2�. Sphere packings have been observed to havea substantial fraction of rattling particles ��2.5% � �2�, andsuch rattlers are also observed in packings of nearly sphericalellipsoids. However, the fraction of rattlers appear to rapidlydecrease as asphericity is increased, so that the majority ofellipsoid packings we have generated do not have any rattlersat all. For spheres, the packings produced with the MD al-gorithm can be very close to the jamming point, so that theinterparticle gaps are close to numerical precision ��10−15��2�. Similar precision can be achieved for ellipsoids, how-ever, this takes at least an order of magnitude more compu-tational effort �or even two orders of magnitude for veryaspherical ellipsoids�. Typically we have jammed the pack-ings to a reduced pressure p�106−109, which ensures thatthe distance to jamming is on order of 10−9−10−6. To really
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-2

identify the exact contact network in the jamming limit re-quires even higher pressures for larger packings due to exis-tence of a multitude �more specifically, a power-law diver-gence� of near contacts in disordered packings �2�. However,
with reasonable effort the average coordination number Zcan be identified within 1% even for systems of N=105 el-lipsoids. Those packings for which we perform an exactanalysis of the contact network �such as, for example, rigor-ously testing for jamming� have been prepared carefully andare sufficiently close to the jamming point to exactly identifyall of the true contacts.
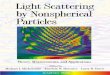
In Fig. 1 we show newer results than those in Ref. �4� for
the jamming density �J and contact number Z of jammedmonodispersed packings of hard ellipsoids in three dimen-sions. The ellipsoid semiaxes have ratios a :b :c=1:�� :�where ��1 is the aspect ratio �for general particle shapes, �is the ratio of the radius of the smallest circumscribed to thelargest inscribed sphere�, and 0���1 is the “oblateness” orskewness ��=0 corresponds to prolate and �=1 to an oblatespheroid�. It is seen that the density rises as a linear functionof �−1 from its sphere value �J�0.64, reaching densities ashigh as �J�0.74 for the self-dual ellipsoids with �=1/2.The jamming density eventually decreases again for higheraspect ratios, however, we do not investigate that region inthis work. The contact number also shows a rapid rise with�−1, and then plateaus at values somewhat below isocon-
strained, Z�10 for spheroids, and Z�12 for nonspheroids.In Sec. IX we will need to revert to two dimensions �ellipses�in order to make some analytical calculations possible. Wetherefore also generated jammed packings of ellipses, andshow the results in Fig. 2. Since monodispersed packings ofdisks always crystallize and do not form disordered jammedpackings, we used a binary packing of particles with onethird of the particles being 1.4 times larger than the remain-ing two thirds. The ellipse packings show exactly the samequalitative behavior as ellipsoids.
B. Nontechnical summary of results
In this section, we provide a nontechnical summary ourtheoretical results and observations discussed in the mainbody of the paper. This summary is intended to give readersan intuitive feeling for the mathematical formalism devel-oped in this work and demonstrate the physical meaning andrelevance of our results. We will refer the interested reader toappropriate sections to find additional details.
One aim of this paper is to explain the numerical resultspresented in Sec. I A. In particular, we will explain whyjammed disordered packings of ellipsoids are strongly hypo-constrained near the sphere point, and also why, even farfrom the sphere point, ellipsoid packings are hypocon-strained rather than isoconstrained as are sphere packings.By a “jammed packing” we mean a packing in which anymotion of the particles, including collective combined trans-lational and rotational displacements, introduces overlap be-tween some particles. Under appropriate qualifications, ajammed packing can also be defined as a rigid packing, thatis, a packing that can resolve any externally applied forcesthrough interparticle ones.
Readers should observe that the terms “stable,” “rigid,”and “jammed” are defined differently by different authors.These different definitions are, however, mathematicallyclosely related. For example, Ref. �8� defines a rigid packingas a packing which has no floppy modes, thus relying onlinearization of the impenetrability constraints. We prefer touse the term “jammed” for kinematic considerations, and notinvolve linear approximations so that all definitions apply tosystems of nonspherical particles. Reference �8� defines astable packing as one which is a strict local potential energyminimum �where the potential energy is, for example, grav-ity�. A precise definition of jamming based on stability isdeveloped mathematically in Ref. �20�. Since a packing canbe at a stable energy minimum without being jammed �see,
1 1.5 2 2.5 3
Aspect ratio α0.64
0.66
0.68
0.7
0.72
0.74φ J
β=1 (oblate)β=1/4β=1/2β=3/4β=0 (prolate)
1 2 3α
6
8
10
12
Z
FIG. 1. �Color online� Jamming density and average contactnumber �inset� for packings of N=10 000 ellipsoids with ratios be-tween the semi-axes of 1 :�� :� �see Fig. 2 in Ref. �4��. The isocon-strained contact numbers of 10 and 12 are shown as a reference.
1 1.25 1.5 1.75 2 2.25
Aspect ratio α4
4.5
5
5.5
6
Con
tact
num
ber
Z
γ=10−5
γ=10−4
Theory
1 1.2 1.4 1.6α
0.85
0.86
0.87
0.88
0.89
0.9
Den
sity
φ J
FIG. 2. �Color online� Average contact number and jammingdensity �inset� for bi-dispersed packings of N=1000 ellipses withratios between the semi-axes of 1 :�, as produced by the MD algo-rithm using two different expansion rates � �affecting the resultsonly slightly�. The isoconstrained contact number is 6. The resultsof the leading-order �in �−1� theory presented in Sec. IX are shownfor comparison.
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-3

for example, Fig. 13 in Ref. �8��, we use a more stringentdefinition. We have chosen the more stringent definition be-cause our focus is on locally maximally dense packings, thatis, packings where the density cannot be increased by con-tinuously displacing the particles. Such packings are relevantto understanding granular materials that have been vibratedor shaken for long periods of time �21,22�, and also to un-derstanding the inherent structures of glassy materials �3,23�.They can be produced computationally with our moleculardynamics algorithm and experimentally by shaking the pack-ing container while adding more particles �4,19�. It is impor-tant to point out that we do not wish to promote our defini-tion of jamming as the “correct” one. It is equally “correct”to define a jammed packing as one stable under a particularapplied load, and then study the particle rearrangements thatresult when the direction of the external applied forceschange. In fact, realistic granular assemblies are not jammedaccording to our strict definitions, and particles typically re-arrange in response to external perturbations. In the limit ofinfinite compaction, however, the rearrangements will ceaseand the assembly will become jammed. We focus here onunderstanding this terminal idealized jammed state as an im-portant first step in understanding more realistic systems. Ad-ditionally, we are interested in the mathematics and physicsof maximally dense disordered packings in their own right�4�.
1. Hypostatic packings of nonspherical particles can be jammed
As explained in Sec. IV, the isoconstrained property isusually justified in two steps. First, nondegeneracy is in-
voked to demonstrate the inequality Z�2df, then, the con-
verse inequality Z2df is invoked to demonstrate the equal-
ity Z=2df. The inequality Z2df is usually justified byclaiming that a packing cannot be jammed without havingmore contacts �impenetrability constraints� than degrees offreedom. A hypoconstrained packing necessarily has“floppy” or zero modes, which are collective motions of theparticles that preserve the interparticle distances to first orderin the magnitudes of the particle displacements. It is claimedthat such floppy modes are not blocked by the impenetrabil-ity constraints and therefore a hypoconstrained packing can-not be jammed. Alternatively, it is claimed that externallyapplied forces that are in the direction of such floppy modescannot be resisted �sufficiently� by the interparticle forcesand therefore the packing cannot be rigid. We will now ex-plain, through an example, why these claims are wrong and,in fact, why a hypoconstrained packing can be jammed/rigidif the curvature of the particles at the point of contact issufficiently flat in order to block the floppy modes.
Consider an isoconstrained jammed packing of hard cir-cular disks, as illustrated in Fig. 3. In reality, the disks wouldbe elastic �soft� but stiff, and let us imagine the system isunder a uniform state of compression, so that the particlesare exerting compressive forces on each other. If there are noadditional external forces, the interparticle forces would bein force equilibrium. The packing is translationally jammed,and the disk centroids are immobile; however, the �friction-less� disks can freely rotate without introducing any addi-
tional overlap. That is, if we take into account orientationaldegrees of freedom, the disk packing would not be jammed.It would possess floppy modes consisting of particles rotat-ing around their own centroids. These floppy modes are how-ever trivial at the circle �sphere� point in that they do notactually change the packing configuration.
Now imagine making the particles noncircular �or non-spherical in three dimensions� and, in particular, makingthem polygons, so that the point contacts between the disksbecome �extended� contacts between flat sides of the poly-gons. The floppy modes still remain, in the sense that rota-tions of the polygons, to first order, simply lead to the twotangent planes at the points of contact sliding along eachother without leading to overlap. However, it is clear that thisis only a first-order approximation. In reality, the polygonscannot be rotated because such rotation leads to overlap inthe extended region of contact around the point of contact.To calculate the amount of overlap, one must use second-order terms, that is, consider not only the tangent planes atthe point of contact but also the curvature of the particles atthe point of contact. Low curvature, that is, “flat” contacts,block rotations of the particles. It should be evident that evenif the radius of curvature is not infinite, but exceeds a certainthreshold �24�, the floppy modes would in fact be blockedand the packing would be jammed despite being hypocon-strained. In fact, the packing has exactly as many contacts asthe original disk packing.
It is important to note that contact curvature cannot blockpurely translational particle displacements unless one of theparticles is curved outward, i.e., is concave �e.g., imagine adent in a table and a sphere resting in it, not being able toslide translationally�. If the particles shapes are convex, apacking cannot have fewer contacts than there are transla-
tional degrees of freedom, that is, Z2d. This explains whyhypersphere packings are indeed isoconstrained. It is onlywhen considering rotational degrees of freedom that jammedpackings can be hypoconstrained.
FIG. 3. �Color online� A jammed packing of hard disks �yellow�is converted into a jammed packing of nonspherical particles byconverting the disks to polygons �different colors�, without chang-ing the contact network or contact forces. This preserves the jam-ming property, since the floppy modes composed of pure particlerotations are blocked by the flat contacts. Jamming would also bepreserved if the disks swell between the original shape and thepolygonal shape, so that the curvature of the particle surfaces at thepoint of contact is sufficiently flat.
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-4

Those that prefer to think about rigidity �forces� wouldconsider applying external forces and torques on the particlesin the example from Fig. 3. The forces would clearly beresisted just as they were in the jammed disk packing. How-ever, at first sight, it appears that torques would not be re-sisted. In fact, it would seem that torques cannot be resistedby interparticle forces since, for each of the particles, thenormal vectors at the points of contact all intersect at a singlepoint �the center of the hard disks� and therefore the nettorque is identically zero. This argument, however, neglectsan important physical consideration: the deformability of theparticles. Namely, no matter how stiff the particles are, theywill deform slightly under an applied load. In particular,upon application of torques, the particles will rotate and thenormal vectors at the points of contact would change and nolonger intersect at a single point, and the packing will be ableto resist the applied torques. One may be concerned aboutthe amount of rotation necessary to resist the applied load. Ifthe packing needs to deform significantly to resist appliedloads, should it really be called rigid?
To answer such concerns, one must calculate the particledisplacements needed to resist the load. Such a calculation,carried out for deformable particles in Sec. VIII, points to theimportance of the preexisting �i.e., internal� contact forces.This is easy to understand physically. If the packing is undera high state of compression, the interparticle forces would belarge and even a small change in the packing geometry �de-formation� would resist large torques. If, on the other hand,the internal forces �stresses� are small, the particles wouldhave to deform sufficiently to both induce sufficiently largecontact forces and to change the normal vectors sufficiently.This kind of stability, requiring sufficiently large internalstresses, is well known for engineering structures called“tensegrities.” These structures are built from elastic cablesand struts, and are stabilized by stretching the cables so as toinduce internal stresses. Beautiful and intriguing structurescan be built that are rigid even though they appear not to besufficiently braced �as bridges or other structures would haveto be�.
While the above discussion focused on packings of mac-roscopic elastic particles, similar arguments apply also tosystems such as glasses. For such systems, floppy modes aremanifested as zero-frequency vibrational modes, that is, zeroeigenvectors of the dynamical matrix. The calculations inSec. VIII show that for nonspherical particles, the dynamicalmatrix contains a term proportional to the internal forces andinvolving the contact curvatures. If the system is at a positivepressure, the forces will be nonzero and this term contributesto the overall dynamical matrix. In fact, it is this term thatmakes the dynamical matrix positive definite, i.e., that elimi-nates zero-frequency modes despite the existence of floppymodes.
2. Translational versus rotational degrees of freedom
Having explained that hypoconstrained packings of non-spherical particles can be jammed if the interparticle contactsare sufficiently flat, we now try to understand why packingsof nearly spherical particles are hypoconstrained. The analy-sis will also demonstrate why packings of hard ellipsoids are
necessarily denser than the corresponding sphere packings.The first point to note is that disordered isoconstrained
packings of nearly spherical ellipsoids are hard to construct.In particular, achieving isocounting near the sphere point re-quires such high contact numbers �specifically, Z=d�d+1��that translational ordering will be necessary. Translationallymaximally random jammed �MRJ� sphere packings have Z=2d, and even if one considers the observed multitude ofnear contacts �2�, they fall rather short of Z=d�d+1�. Itseems intuitive that translational crystallization would benecessary in order to raise the contact number that much. Inother words, in order to gain sufficiently many constraints,one would have to sacrifice translational disorder. Further-more, there is little reason to expect packings of nearlyspherical particles to be rotationally jammed. Near the jam-ming point, it is expected that particles can rotate signifi-cantly even though they will be translationally trapped andrattle inside small cages, until of course the actual jammingpoint is reached, at which point rotational jamming will alsocome into play. Therefore, it is not surprising that near thesphere point, the translational structure of the packingschanges little.
Mathematically, jamming is analyzed by using a Taylorexpansion of the interparticle distances in the particle dis-placements. At the first-order level, this expansion containsfirst-order terms coming from translations and from rotationsand involving the contact points and contact normals. Theexpansion also contains second-order terms from transla-tions, rotations, and combined motions, involving addition-ally the contact curvatures. And of course, there are evenmore complicated higher-order terms. One should be carefulof such a Taylor expansion for two reasons. First, the expan-sion assumes that terms coming from translations and rota-tions are of the same order. This is clearly not true for eitherthe case of perfectly spherical particles, when rotationalterms are identically zero, or for the case of rods or plates,where even a small rotation can cause very large overlap.Second, the expansion assumes that various quantities re-lated to the particle and contact geometry �for example, thecontact curvature radii� are of similar order. This fails, forexample, for the case of planar �flat� contacts, where even asmall rotation of the particles leads to significant overlap farfrom the point of contact. These subtle points arise onlywhen considering aspherical particles and should caution onefrom blindly generalizing the mathematical formalism ofjamming developed and tested only within the context ofsphere packings.
In Sec. IX, we will consider packings of nearly sphericalellipsoids as a perturbation of jammed sphere packings inwhich the particles, following a slight change of the particleshape away from perfect spherical symmetry, translate androtate in order to reestablish contacts and jamming. Whilethe necessary particles’ translations are small, the particlerotations are large. In fact, rotational symmetry is broken,and particles must orient themselves correctly, so that con-tacts can be reestablished, and also so that forces and torquesbecome balanced. This symmetry breaking is the cause of thecusp like non analyticity of the density as a function of par-ticle shape �4�. We will see that the particle orientations in
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-5

the final jammed packing of nearly spherical ellipsoids arenot random, but rather, they are determined by the structureof the initial sphere packing. Of course, as aspect ratio in-creases, rotations become more and more on equal footingwith translations, and the packings become both truly trans-lationally and orientationally disordered.
This picture of jamming in the vicinity of the sphere pointalso explains why the density rises sharply near the spherepoint for ellipsoids. Start with a jammed sphere packing andapply an affine transformation to obtain an aligned �nematic�packing with exactly the same density. This packing will notbe rotationally jammed, and by displacing the particles onewill be able to open up free volume between them and there-fore increase the density. We will show that in fact the maxi-mal increase in the density is obtained for the choice of par-ticle orientations that balances the torques on the particles inaddition to the forces. Therefore, the jammed disordered el-lipsoid packings we obtain near the sphere point are thedensest perturbation of the corresponding sphere packings.The added rotational degrees of freedom allow one to in-crease the density beyond that of the aligned �nematic� pack-ing, which for ellipsoids has exactly the same density as thesphere point.
In conclusion, near the sphere point, there is a competi-tion between translational and rotational jamming and alsobetween translational and rotational disorder. At the spherepoint �=1, and in this neighborhood, translational degrees offreedom win. As one moves away from the sphere point,however, translational and rotational degrees of freedom startto play an equal role. For very large aspect ratios, �1, it isexpected that rotational degrees of freedom will dominate,although we do not investigate that region here.
C. Contents
Before proceeding, we give an overview of our notationin Sec. II. In Sec. III, we discuss the nonoverlap conditionsbetween convex hard particles. In Sec. IV, we define jam-ming and investigate the reasons for the failure of the iso-counting conjecture for nonspherical particles. In Sec. V, wedevelop the first- and second-order conditions for jammingin a system of nonspherical particles, and then design anduse a practical algorithm to test these conditions for ellipsoidpackings in Sec. VI. In Sec. VII, we consider the thermody-namical behavior of hypoconstrained packings that are closeto, but not quite at, the jamming point. In Sec. VIII, wediscuss the connections between jammed packings of hardparticles and strict energy minima for systems of deformableparticles. In Sec. IX, we focus on packings of nearly spheri-cal ellipsoids, and finally, offer conclusions in Sec. X.
It is important to note that Secs. III, V, and VI are highlytechnical, and may be either skipped or skimmed by readersnot interested in the mathematical formalism of jamming.Readers interested in specific examples of hypoconstrainedpackings are referred to Sec. IV B 2 and the Appendix.
II. NOTATION
We have tried to develop a clear and consistent notation,however, in order to avoid excessive indexing and notation
complexity we will often rely on the context for clarity. Thenotation is similar to that used in Ref. �15� and attempts tounify two and three dimensions whenever possible. We referto reader to Ref. �15� or Ref. �25� for details on representingparticle orientations and rotations in both two and three di-mensions.
We will use matrix notation extensively, and denote vec-tors and matrices with bolded letters, and capitalize matricesin most cases. Infinite-dimensional or discrete quantitiessuch as sets or graphs will typically be denoted with scriptletters. We will often capitalize the letter denoting a vector todenote a matrix obtained from that vector. Matrix multipli-cation is assumed whenever products of matrices or a matrixand a vector appear. We prefer to use matrix notation when-ever possible and do not carefully try to distinguish betweenscalars and matrices of one element. We denote the dot prod-uct a ·b with aTb, and the outer product a � b with abT. Wedenote a vector with all entries unity by e=1, so that �iai=eTa. We consider matrices here in a more general linearoperator sense, and they can be of order higher than 2 �i.e.,they do not necessarily have to be a rectangular two-dimensional array�. We refer to differentials as gradientseven if they are not necessarily differentials of scalar func-tions. Gradients of scalars are considered to be column vec-tors and gradients of vectors or matrices are matrices or ma-trices �linear operators� of higher rank.
A. Particle packings
A jammed particle packing has a contact network indicat-ing the touching pairs of particles �i , j. We will sometimestalk about a particular particle i or a particular contact �i , j ij and we will usually let the context determine what spe-cific particle or contact is being referred to or, if deemednecessary, put subscripts such as i or ij to make it specificwhat particle or contact is being referred to. The contact ji isphysically the same undirected contact as ij, but the twodirected contacts are considered distinct.
There are two primary kinds of vectors x, particle vectorsX= �xi�= �x1 , . . . ,xN�, which are obtained by concatenatingthe vectors xi �typically of size of the order of the spacedimensionality d� corresponding to each of the N particles,and contact vectors y= �yij�= �y1 , . . . ,yM�, obtained by con-catenating the �typically scalar� values yij corresponding toeach of the M contacts �numbered in arbitrary order from 1to M�. Note the capitalization of particle vectors, which wewill often do implicitly, to indicate that one can view X as amatrix where each row corresponds to a given particle. If acontact vector agglomerates a vector quantity attached toeach contact, for example, the common normal vector n atthe point of contact of two particles, it too would be capital-ized, e.g., N= �nij�.
1. Packing configuration
A packing is a collection of N hard particles in Rd suchthat no two particles overlap. Each particle i has df configu-rational degrees of freedom, for a total of Nf =Ndf degrees offreedom. A packing Q= �Q ,�� is characterized by the con-figuration Q= �q1 , . . . ,qN��RNf, determining the positions
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-6

of the centroid and the orientations of each particle, and thepacking fraction �density� � determining the size of the par-ticles. For spheres QR corresponds to only the positionsof the centroids, and df =d. For nonspherical particles with-out any axes of symmetry there are an additional d�d−1� /2rotational degrees of freedom, for a total of df =d�d+1� /2degrees of freedom. In actual numerical codes particle orien-tation is represented using unit quaternions, which are redun-dant representations in the sense that they use d�d−1� /2+1coordinates to describe orientation. Here we will be focusingon displacements of the particles �Q from a referencejammed configuration QJ, and therefore we will representparticle orientations as a rotational displacement from a ref-erence orientation ��. In two dimensions ��=�� simplydenotes the angle of rotation in the plane, and in three di-mensions the direction of �� gives the axis of rotation andits magnitude determines the angle of rotation. For simplic-ity, we will sometimes be sloppy and not specifically sepa-rate centroid positions from orientations, and refer to qi as �ageneralized� position; similarly, we will sometimes refer toboth forces and torques as �generalized� forces.
2. Rigidity matrix
For the benefit of readers not interested in the mathemati-cal formalism, we briefly introduce the concepts and notationdeveloped in more detail in Sec. III. We denote the distance,or gap, between a pair of hard particles i and j with ij. Whenconsidering all of the M contacts together, the gradient of thedistance function = � ij� with respect to the positions �i.e.,displacements� of the particles is the rigidity matrix A=�Q . This linear operator connects, to first order, thechange in the interparticle gaps to the particle displacements� =AT�Q. We denote the magnitudes of the compressive�positive� interparticle forces carried by the particle contactswith f= �f ij�, f ij 0, where it is assumed that the force vec-tors are directed along the normal vectors at the point ofcontact �since the particles are frictionless�. The total forcesand torques exerted on the particles B �alternatively denotedby �B if thought of as force imbalance� are connected to theinterparticle forces via a linear operator that can be shown tobe the conjugate �transpose� of the rigidity matrix, B=Af.
A subtle point that we will return to later is the role of thedensity �. Since we are interested in �locally� maximallydense disordered packings, we will sometimes consider thedensity as an additional kinematic degree of freedom. Thatis, we will sometimes include the change in density �� inthe deformation �Q. This effectively adds an additional rowto the rigidity matrix. One may similarly include additionalglobal degrees of freedom, such as boundary conditions, andadd further rows to the rigidity matrix. This also adds gen-eralized forces �stresses� as the conjugate variables to thoseadditional kinematic degrees of freedom �25�.
B. Cross products
In three dimensions, the cross product of two vectors is alinear combination of them that can be thought of as matrix-vector multiplication
a � b = Ab = − b � a = − Ba , �1�
where
A = �a�� = � 0 − az ay
az 0 − ax
− ay ax 0 = − AT
is a skew-symmetric matrix which is characteristic of thecross product and is derived from a vector. We will simplycapitalize the letter of a vector to denote the correspondingcross product matrix �such as A above corresponding to a�,or use �a�� when capitalization is not possible. In two dimen-sions, there are two “cross products.” The first one gives thevelocity of a point r in a system which rotates around theorigin with an angular frequency � �which can also be con-sidered a scalar ��,
v = ��r = �− �ry
�rx� = �r , �2�
where
� = �0 − �
� 0� = − �T
is a cross product matrix derived from �. The second kind of“cross product” gives the torque around the origin of a forcef acting at a point �arm� r,
� = f � r = − r � f = �fxry − fyrx� = FLr , �3�
where
FL = �− fy fx� = − �FR�T
is another cross product matrix derived from a vector �the Land R stand for left and right multiplication, respectively�.Note that in three dimensions all of these coincide, FL=FR
=F, and also ��, while in two dimensions they are re-lated via a�b=Ab=−BRa.
III. NONOVERLAP CONSTRAINTS AND INTERPARTICLEFORCES
In this section we will discuss hard-particle overlap po-tentials used to measure the distance between a pair of hardparticles. These potentials will be used to develop analyticexpansions of the nonoverlap conditions in the displacementsof the particles. This section is technical and may be skippedor skimmed by readers not interested in the mathematicalformalism of jamming. Interested readers can find additionaltechnical details on the material summarized in this sectionin Chap. 2 of Ref. �25�.
A. Overlap potentials
The nonoverlap condition between a pair of particles Aand B can be thought of as an inequality between the posi-tions and orientations of the particles. For this purpose, wemeasure the distance between the two ellipsoids using theoverlap potential �A ,B�= �qA ,qB�, whose sign not onlygives us an overlap criterion,
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-7

�A,B� � 0 if A and B are disjoint,
�A,B� = 0 if A and B are externally tangent,
�A,B� � 0 if A and B are overlapping,
but which is also at least twice continuously differentiable inthe positions and orientations of A and B. An additional re-quirement is that �A ,B� be defined and easy to compute forall positions and orientations of the particles.
We define and compute the overlap conditions using aprocedure originally developed for ellipsoids by Perram andWertheim �26�. This procedure is easily generalized to anyconvex particle shape given by the inequality �r��1, wherethe shape function is strictly convex and defined through
�r� = ���r��2 − 1,
where � is the scaling factor by which the particle needs tobe resized in order for the point r to lie on its surface. Theun-normalized normal vector to the surface at a given pointr, if the particle is rescaled so that it passes through it, isn�r�=� �r�. Define also the displacement between the par-ticle centroids rAB=rA−rB, and the unit vector joining thetwo particle centroids with uAB=rAB / �rAB�.
The Perram and Wertheim �PW� overlap potential is de-fined through
= �2 − 1 = max0���1
minrC
�� A�rC� + �1 − �� B�rC�� .
For every multiplier �, the solution of the inner optimizationover rC is unique due to the strict convexity of rC, and sat-isfies the gradient condition
�nA�rC� = − �1 − ��nB�rC� ,
which shows that the normal vectors are parallel �with oppo-site directions�. The solution of the outer optimization prob-lem over � is given through the condition
= A�rC� = B�rC� ,
which means that when the particles are rescaled by a com-mon scaling factor �=1+��=�1+ they are in externaltangency, sharing a common normal direction n=nA / �nA��i.e., normalized to unit length and directed from A to B�, andsharing a contact point rC. When focusing on one particle wecan measure rC with respect to the centroid of the particle, orotherwise specifically denote rAC=rC−rA and rBC=rC−rB.This is illustrated for ellipses in Fig. 4. If the particles aretouching then �=1 and the procedure described above givesus the geometric contact point and therefore the commonnormal vector. In the case of spheres of radius O the PWoverlap potential simply becomes
AB =�rA − rB�T�rA − rB�
�OA + OB�2 − 1 =lAB2
�OA + OB�2 − 1, �4�
which avoids the use of square roots in calculating the dis-tance between the centers of A and B, lAB, and is easilymanipulated analytically.
1. Derivatives of the overlap potentials
We will frequently need to consider derivatives of theoverlap function with respect to the �generalized� positionsof the particles, either first order,
�qi = �i = � �
�qi�
or second order
�qiqj
2 = �ij2 = � �2
�qi�qj� .
To first order, the particles can be replaced by their �parallel�tangent planes at the point of contact and the first order de-rivatives can be expressed in terms of quantities relating tothe two tangent planes. To second order, the particles can bereplaced by paraboloids that have the same tangent plane, aswell as the same principal curvature axes and the same radiiof curvatures as the two particles at the point of contact. It istherefore possible to derive general expressions for the de-rivatives in terms of quantities relating to the normal vectorsand surface curvatures of the particles at the point of contact.
The first-order derivatives can easily be expressed interms of the position of the contact point rC and the �normal-ized and outwardly directed� contact normal vector n. Forthis purpose, it is easier to measure the distance between twoparticles in near contact via the Euclidian interparticle gap hgiving the �minimal� surface-to-surface distance between theparticles along the normal vector. Moving one of the par-ticles by �q= ��r ,��� displaces the contact point by �rC
=�r+���rC and therefore changes the gap by �h=−nT�rC=−nT�r− �rC�n�T��, giving the gradient
�qh = − � n
rC � n� .
The relation between the �small� Euclidian gap h and the�small� gap as measured by the PW overlap potential canbe seen by observing that scaling an ellipsoid by a factor �displaces the contact point by �rC=��rC. Therefore, thescaling factor needed to close the interparticle gap is
FIG. 4. Illustration of the common scaling � that brings twoellipses �dark gray� into external tangency at the contact point rC.
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-8

� �
2�
h
�rBC − rAC�Tn=
h
rABT n
,
giving the gradient of the overlap potential �q =2��qh� / �rAB
T n�,
�A/B = �2
rABT n
� n
r�A/B�C � n� .
For spheres the cross product is identically zero and rotationscan be eliminated from consideration.
The second-order derivatives are not as easily evaluatedfor a general particle shape. In two dimensions, or in threedimensions when the principal radii of curvatures at the pointof contact are equal, one can replace the particle around thepoint of contact with a sphere of the appropriate position andradius. However, when the radii of curvatures are differentthis is not as easy to do. We will give explicit expressions forthe second-order derivatives of for ellipsoids in Sec.VI A 2. Related first- and second-order geometric derivativeshave been derived for general particle shapes �i.e., using thenormal vectors and curvature tensors of the particles at thepoint of contact� in the granular materials literature in moregeneral contexts �20,27�; here we specialize to the case ofhard frictionless ellipsoids.
B. The rigidity matrix
When considering all of the M contacts together, the gra-dient of the overlap potential = � ij� is the important rigiditymatrix
A = �Q� .
This �Nf �M� matrix connects, to first order, the change inthe interparticle gaps to the particle displacements � =AT�Q. It may sometimes be more convenient to work withsurface-to-surface interparticle gaps �h=AE
T�Q �the sub-script E stands for Euclidian�, especially if second-orderterms are not considered �11�. The rigidity matrix is sparseand has two blocks of df nonzero entries in the column cor-responding to the particle contact �i , j, namely, �i ij in theblock row corresponding to particle i and � j ij in the blockrow corresponding to particle j �unless one of these particlesis frozen�. Represented schematically:
A =
�i, j↓
i→
j→ ��
�i ij
�� j ij
� .
C. Interparticle forces
Hard particles in contact can exert a compressive �posi-tive� contact force f= fn, f 0, directed along the normalvector �for frictionless particles�. The total excess force and
torque exerted on a given particle i by the contacts with itsneighbors N�i� is
�bi = − �j�N�i�
f ij� nij
�riCij � nij�
� = � f ij��ihij�
or, considering all particles together,
�B = AEf .
The fact that the matrix �linear operator� connecting forceimbalances to contact forces is the transpose of the rigiditymatrix is well-known and can also be derived by consideringthe work done by the contact forces to displace the particles
W = �bT�Q = �Af�T�Q = fT�AT�Q� = fT�h = fT�AET�Q� ,
showing that A=AET. In this work we will use forces f that
are a rescaled version of the physical forces fE, f ij = �rijTnij�
f ijE /2, so that Af=AEfE. This scaling is more natural for our
choice of overlap potential, and does not affect any of theresults.
In static packings that are under an applied load B, theforce/torque equilibrium condition
Af = − B and f 0
must be satisfied. The actual magnitudes of the forces aredetermined by external loads �for example, the applied pres-sure for a system of deformable particles�, history of thepacking preparation, etc. However, the relation between theforces at different contacts is determined by the packing ge-ometry, or more specifically, by A. Typically forces are res-caled to a mean value of unity eTf=M, and it has been ob-served that the distribution of rescaled contact forces hassome universal features, for example, there is an exponentialtail of contacts carrying a large force, and also a large num-ber of contacts supporting nearly zero force �2,28�. We willsee later that these force chains, or internal stresses, are anessential ingredient of jamming for hard particles.
IV. THE ISOCOUNTING CONJECTURE
In the granular materials literature special attention is of-ten paid to so-called isostatic packings. There are severaldifferent definitions of isostaticity, and most of the discus-sions in the literature are specifically applied to mechanicalstructures composed of elastic bars, to packings of hardspheres, or to packings of frictional particles. In this sectionwe summarize several relevant definitions of and argumentsfor isostaticity and generalize them to nonspherical particles.
We define a packing to be “isoconstrained” if the numberof constraints �contacts� is equal to the total number of de-grees of freedom
Nc = Nf + 1,
where for jammed packings one should count the density �as a single degree of freedom, in addition to the degrees offreedom due to the particles and boundary Nf, as discussedfurther in Sec. IV A 1 and IV A 2. Packings with fewer con-tacts than isoconstrained are called “hypoconstrained” and
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-9

packings with more contacts than isoconstrained are “hyper-constrained.” The isocounting conjecture states that largejammed disordered packings of hard particles are isocon-strained. Defining what precisely is meant by a disorderedpacking is difficult in itself �16,29�. Intuitively, in a disor-dered packing there is only the minimal degree of correla-tions between particles, as necessitated by the constraints ofimpenetrability and jamming. Therefore, it is expected that ina certain sense disordered packings are “generic” �30,31�,and that “special” configurations with geometric degenera-cies will not appear. Note that for large systems the majorityof the degrees of freedom come from the particles them-selves, Nf �Ndf, and the majority of constraints come from
contacts shared between two particles, Nc�M =NZ /2, giv-ing the isocounting property
Z = 2df . �5�
Equation �5� has been verified to very high accuracy forjammed hard-sphere packings �2�. However, disorderedpackings of hard ellipsoids are always hypoconstrained andthus contradict the isocounting conjecture �4�.
The notion of an isoconstrained packing is very closelyrelated to the concept of an isostatic packing, which consid-ers the �linear� independence of the constraints in addition totheir number. An isostatic packing is defined as a packingthat has an invertible �and thus square� rigidity matrix. Thisdefinition has not been formally stated in the literature, and itis the obvious generalization of the definition commonlyused for systems of spheres. One can include the density asan additional degree of freedom when forming the rigiditymatrix, or exclude it, depending on the definition of jammingthat is adopted, as discussed in the next section. This choicechanges the counting arguments by 1. This definition of theterm isostatic implicitly relies on the linearization of the im-penetrability constraints. We try to make our definitions in-dependent of the order of approximation used in some par-ticular expansion. Therefore, we use the simple definition of“isoconstrained” based on counting, and qualify it with“jammed” or “rigid.”
In this section we attempt to deconstruct previous discus-sions of isostaticity and jamming in hard-particle packings,and we hope that through our discussions it will becomeclear why previous “proofs” of the isocounting conjecture donot apply to nonspherical particles, or to put it the other wayaround, what makes disordered sphere packings isocon-strained.
A. Jamming, rigidity, and stability
An essential initial step is defining more precisely what ismeant by a stable, rigid, or jammed packing. All of theseterms have been used in the literature, and in fact we equateeach of them with a particular perspective on jamming.
Kinematic. A packing is jammed if none of the particlescan be displaced in a nontrivial way without introducingoverlap between some particles.
Static. A packing is rigid if it can resolve any externallyapplied forces through interparticle ones, without changingthe packing configuration.
Perturbation. A packing is stable if the structure of thepacking changes smoothly for small perturbations of thepacking.
We will consider each of these approaches separately. Itwill shortly become clear that all of them are closely related,and under certain mild conditions they are actually equiva-lent. We will use the term jamming as an umbrella term, andlater give our preferred definition of jamming, which isbased on the kinematic perspective. We note that it is impor-tant to precisely specify the boundary conditions applied re-gardless of the view used in considering jamming; differentboundary conditions lead to different jamming categories,specifically local, collective, or strict jamming �11,37�. Here,we will sometimes use local jamming in simple examples butmostly focus on collective jamming; all collective particlemotions are blocked by the impenetrability constraints sub-ject to periodic boundary conditions with fixed lattice vec-tors. In order to eliminate trivial uniform translations of thesystems, we can freeze the centroid of one of the particles, toobtain a total of
Nf = Ndf − d
internal degrees of freedom. The exact boundary conditionsaffect the counting of constraints and degrees of freedom,however, the correction is not extensive in N and therefore isnegligible for large system when considering per-particle
quantities such as Z.An important point to note is that the above definitions of
jamming treat all degrees of freedom identically, in particu-lar, translational motion �forces� is treated on the same foot-ing as rotational motion �torques�. This is not necessarily themost appropriate definition, as is easily seen by consideringthe case of spheres, which can rotate in place freely eventhough they are �translationally� jammed. This distinction be-tween translations and rotations will become important inSec. VII when considering packings that are nearly, but notquite jammed. It should also be mentioned that jammed ran-dom particle packings produced experimentally or in simu-lations typically contain a small population of rattlers, i.e.,particles trapped in a cage of jammed neighbors but free tomove within the cage. For present purposes we shall assumethat these have been removed before considering the �possi-bly� jammed remainder. This idea of excluding rattlers canbe further extended to rattling clusters of particles, i.e.,groups of particles that can be displaced collectively eventhough the remainder of the packing is jammed. In fact, wewill consider any packing which has a jammed subpacking�called a “backbone”� to be jammed.
1. Kinematic view
The kinematic perspective considers a packing jammed ifit is not possible to continuously displace the particles in anontrivial way without introducing overlap. We have focusedon this perspective in our work, see Refs. �11,32�. That is,the impenetrability conditions preclude any motion of theparticles. Here trivial motions are those that do not changethe distances between any two particles, such as global trans-lations when periodic boundary conditions are used. We can
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-10

assume that such trivial motions have been eliminated viasome artificial constraint, such as fixing the centroid of oneparticle externally when using periodic boundary conditions.
Mathematically, for any continuous motion �Q�t� thereexists a T�0 such that at least one of the impenetrabilityconstraints between a touching pairs of particles
��QJ + �Q�t�� 0 �6�
is violated for all 0� t�T. A motion �Q�t� such that for all0� t�T none of the constraints are violated is an unjam-ming motion. One can in fact restrict attention to analyticpaths �Q�t�, and also show that a jammed packing is in asense isolated in configuration space, since the only way toget to a different packing is via a discontinuous displacement��Q � �0 �12�.
A similar definition of jamming was used by Alexander inRef. �10�. He considers a packing to be geometrically rigid ifit cannot be “deformed continuously by rotating and trans-lating the constituent grains without deforming any of themand without breaking the contacts between any two grains.”This definition implies that a packing in which particles canbe moved so as to break contacts �for example, imagine apebble resting on other pebbles in gravity, and moving itupward away from the floor� is jammed. Later in the paperAlexander talks about adding constraints to block motionsthat break contacts. We in fact have in a certain sense achoice in the matter, determining whether we work with in-equality or equality constraints. We choose to work with in-equality constraints, since this is the natural choice for fric-tionless hard particles; there is no cohesion between theparticles maintaining contacts. In effect, when counting de-grees of freedom for packings, we count the density � �i.e.,the possible collective rescaling of the particle shapes neces-sary to maintain contacts� as a single degree of freedom, asdiscussed further in Sec. IV A 2.
2. Static view
The static perspective considers a packing rigid if it canresolve any applied forces through interparticle ones. This issometimes referred to as “static rigidity,” to be contrastedwith “kinematic rigidity” as defined in the previous section.For hard particles, there is no scale for the forces, and so theactual magnitude of the forces does not matter, only the rela-tive magnitudes and the directions. The particles do not de-form, but can exert an arbitrary positive contact force.
Mathematically, we consider the existence of a solution tothe force-equilibrium equations
Af = − B, where f 0, �7�
for all resolvable external loads B. The space of resolvableloads is determined by the boundary conditions: certainforces such as pulling on the walls of a container cannot beresolved by any packing and need to be excluded. This issimilar to the definition used in Ref. �7�: A packing is me-chanically stable “if there is a nonzero measure set of exter-nal forces which can be balanced by interbead ones.” Theproblem with this definition of rigidity and in particular Eq.�7� is that it does not take into account the fact that the
geometry of the packing, i.e., the rigidity matrix A, changeswhen an external load is applied on the packing. Physically,forces arise only through deformation, and this deformation,however small, together with the preexisting forces in thepacking, may need to be taken into account. Forces are inessence Lagrange multipliers associated with the impenetra-bility constraints in Eq. �6�; the very existence of suchLagrange multipliers may require a change in the packingconfiguration.
The above formulation also neglects the existence ofsmall interparticle gaps, which cannot be neglected whenanalyzing the response of packings to applied loads, espe-cially for granular materials �8,11�. While mathematically wetalk about ideal jammed packings, where geometric contactsare perfect, in reality one should really analyze packings thatare almost jammed, i.e., where the contacts are almostclosed. This is more appropriate for granular materials,where there is typically some room for the particles to movefreely. Alternatively, one should analyze packings where allthe contacts are indeed closed, however, the system is undersome form of global compression. This is appropriate forglassy systems under a uniform external pressure. When in-terparticle gaps are present, particles must displace slightlyto close the gaps so that they can exert positive contactforces on one another and resist the applied load. The set ofcontacts �i , j that are closed �i.e., have a positive force f ij� isthe set of active contacts. Different applied loads will besupported by different active contact networks, and for suf-ficiently small interparticle gaps finding the active set re-quires solving a linear program, as discussed in Sec. V D 1.When there is a global external compression �pressure� in thesystem that keeps all contacts closed, one has one more ad-ditional force-equilibrium equation in Eq. �7� that has thepressure p on the right hand side. Mathematically, the pres-sure is the conjugate �dual� variable of the density �viewed asa degree of freedom� �25�.
Various counting arguments related to force equilibriumconstraints, starting with the seminal work of Maxwell, haveappeared in the engineering literature on mechanical struc-tures �33�. There are, however, some important differencesbetween elastic structures and packings of hard particles.Most significantly, the non-negativity of the contact forces isan added condition, and it effectively adds +1 to the numberof contacts needed to ensure static rigidity, i.e., adds a singledegree of freedom in various counting arguments. For clas-sical structures of elastic bars, an isostatic framework is suchthat it has exactly as many bars, i.e., unknown internal barforces, as there are force-equilibrium equations M =Nf. Thatis, the rigidity matrix is square and the solution to the force-equilibrium equations is f=−A−1B. Finding the internalforces therefore does not require knowing anything about thespecific elastic properties of the bars: the structure is stati-cally determinate �34�. Reference �8� defines “isostatic struc-tures” as “such that all problems are isostatic, whatever thechoice of the load. More precisely, one requires all loadsorthogonal to the overall rigid body degrees of freedom to besupportable with a unique determination of internal forces.”
On the other hand, a jammed isoconstrained packing, aswe have defined it, has M =Nf +1 contacts, and the additionalone contact is needed in order to ensure that any applied load
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-11

can be resolved by non-negative interparticle forces in theactive contact network. Assuming the existence of �infinitesi-mally� small but positive interparticle gaps, under certainmild non-degeneracy conditions, it can be demonstrated thatif one applies a specific load only Nf of the contacts willactually be active, and one contact will be broken and willcarry no force. Different contacts will be broken for differentloads, however, once it is known which contact is broken�see Sec. V D 1� the active contact network is isostatic in theclassical structural mechanics sense and the forces can bedetermined, f=−Aactive
−1 B, without resorting to constitutiveelastic equations for the contacts. The additional contact ap-pears because of our choice of definition of jamming; if oneconsiders stability under a single external load, then all thecontacts will be active, M =Nf. This difference has somesubtle effects that may lead to confusion when comparing toprevious results in the literature. For example, as we will seein Sec. V, ideal jammed packings posseses a nontrivial inter-nal stress, or self-stress f�0, Af=0. In elastic structuressuch an internal stress is associated with overconstrained�sub�structures, and such stresses do not appear in unloadedgranular piles. The fact that we observe only a single self-stress for packings means that upon removal of any contactfrom the packing there will no longer be self-stresses left,i.e., the system will no longer be overconstrained.
Note that a positive internal �self� stress does appear inglasses under a uniform external pressure �28�, and in thosesystems indeed all Nf +1 contacts are active and participatein the resolution of applied loads. The magnitude of the in-ternal stresses is determined by the external pressure. Forhigh pressures, depending on the stiffness of the packingelements, additional active contacts may form as particlesdeform and one would have to consider the constitutive elas-tic equations for the contacts in order to determine the inter-particle forces.
3. Perturbation view
The perturbation perspective considers a packing to bestable if the structure of the packing changes smoothly forsmall perturbations of the packing. In particular, the structureof the packing includes the positions of the particles and thecontact force network. Perturbations to be considered shouldinclude changes in the grain internal geometry �deforma-tion�, strain, and stress �external forces due to shaking, vi-bration, or a macroscopic load�. In great generality we canrestrict our perturbations to small perturbations of the dis-tances between contacting particles combined with smallperturbations of the applied forces. Such a perspective onjamming was recently presented in Ref. �20�. In this work,however, only perturbations of the applied forces were con-sidered. However, it is realized in Ref. �20� that deformationsof the boundary conditions can easily be incorporated with-out changing the stability conditions. In fact, arbitrary exter-nal perturbations of the geometry of the contacts can be con-sidered in addition to the applied load perturbations withoutany significant complication.
Mathematically, we consider the sensitivity of the con-figuration and force chains to all perturbations of the inter-particle gaps � and applied forces �B away from zero, i.e.,
we look for solutions of the coupled system of equations ofpreserving contacts and maintaining force equilibrium:
�A�Q + �Q���f + �f� = − ��B ,
�Q + �Q� − � � = − ��
eT�f = 0 , �8�
where ��0 is a small number and we have assumed f�0.Note that in Ref. �20�, �f are called the “basic statical un-knowns” and �Q are called the “basic kinematical un-knowns.”
Similarly to the external forces, the space of resolvablegap perturbations is determined by the boundary conditions:global expansions will lead to gaps that cannot all be closedunless the particles grow by a certain scaling factor �=1+��. It is therefore convenient to include � ��2�� as anadditional variable. An added constraint is that the normal-ization eTf=M be maintained. It is important to note that weexplicitly account for the dependence of the rigidity matrixon the configuration in the force-balance equation. Noticethat when we combine perturbations of the geometry andforces together, the total number of variables is M +Nf, andthe total number of constraints is also M +Nf �here we in-clude the global particle rescaling � � as a degree of free-dom�. Therefore there are no underdetermined �linear� sys-tems as found in counting arguments that consider geometryand forces separately, as is typically done in the literature.
B. Isocounting
In this section we will attempt to deconstruct previousarguments in justification of an isocounting conjecture,mostly in the context of sphere packings, and try to identifythe problems when the same arguments are applied to non-spherical particles. The isocounting conjecture �property� is
usually justified in two steps. First, an inequality Z�2df is
demonstrated, then, the converse inequality Z2df is in-
voked to demonstrate the equality Z=2df. We will demon-strate that it is the second of these steps that fails for non-spherical particles, however, first we recall some typical
justifications for the inequality Z�2df. The observation that
the inequality Z2df does not generally apply to nonspheri-cal particles is already made by Roux in Ref. �8�, as we pointout below. Roux also discusses the applicability of the con-
verse inequality Z�2df in significant detail; here we presentour own summary for completeness.
It is important to note that the arguments supporting the
inequality Z2df given below apply only to cohesionlessparticles, that is, particles for which only compressive inter-particle contact forces are allowed. In fact, stable packings ofadhesive �frictionless� particles stability can be hypocon-strained �8�, further reinforcing our criticism of a generallyapplicable isocounting conjecture.
1. Why ZÏ2df applies
A packing with Z�2df is overconstrained, and in a cer-tain sense geometrically degenerate and thus not “random.”
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-12

It can be argued that such a packing is not stable againstsmall perturbations of the packing geometry, since all con-tacts cannot be maintained closed without deforming someof the particles. For example, Tkachenko and Witten �7� con-sider hard-sphere packings with a small polydispersity, sothat particles have slightly different sizes, to conclude that“the creation of a contact network with coordination numberhigher than 2d occurs with probability zero in an ensembleof spheres with a continuous distribution of diameters.”Moukarzel �6,35� considers how the actual stiffness modulusof deformable particles affects the interparticle forces andconcludes that making the particles very stiff will eventuallylead to negative forces and thus breaking of contacts, until
the remaining contact network has Z�2df �36�: “The contactnetwork of a granular packing becomes isostatic when thestiffness is so large that the typical self-stress … would bemuch larger than the typical load-induced stress … granularpackings will only fail to be isostatic if the applied compres-sive forces are strong enough to close interparticle gaps es-tablishing redundant contacts.” A similar argument is madeby Sir Edwards in Ref. �9� for frictional grains: “if z�4 thenthere is a solution with no force on z−4 contacts, and there isno reason why other solutions would have validity.”
These arguments apply also to nonspherical particles,however, it is important to point out that they specificallyonly apply to truly hard-particle packings or to packingsof deformable particles in the limit of zero applied pressure�f→0�. In real physical systems particles will have a finitestiffness and the applied forces will be non-negligible, andsuch packings will have more contacts than the idealizedhard-particle construction.
2. Why ZÐ2df does not apply
The converse inequality, stating that a minimum of M=Nf +1 contacts is necessary for jamming �rigidity�, does notapply to nonspherical particles. We can demonstrate this viv-idly with a simple example of an ellipse jammed betweenthree other stationary �fixed� ellipses, as shown in Fig. 5.This example was also given in Ref. �37�, however, a de-tailed explanation was not provided.
Jamming a disk requires at least three touching disks; theadditional rotational degree of freedom of the ellipse wouldseem to indicate that four touching ellipses would be neededin order to jam an ellipse. However, this is not true: if thenormal contact vectors intersect at a single point, three el-lipses can trap another ellipse, as shown in Fig. 5. We willshortly develop tools that can be used to demonstrate rigor-ously that this example is indeed jammed. Another simple
example demonstrating that Z2df does not apply is therectangular lattice of ellipses, which is collectively jammed
even though Z=4, the minimum necessary even for discs.This example is discussed in the Appendix, where we alsodemonstrate that, in fact, any isostatic packing of spheres canbe converted into a jammed packing of nonspherical par-ticles.
The above example shows that the claim of Ref. �10� that“One requires 4�=3+1� contacts to fix the DOF �degrees offreedom� … of an ellipse in the plane” is wrong. Similarly, it
shows that the argument in Ref. �6�, namely, that the mini-mum number of contacts needed for a packing of N spheresin d dimensions to be rigid is dN, cannot be generalized tononspherical particles by simply replacing d with df. Claimsthat the number of constraints must be larger than the num-ber of degrees of freedom have been made numerous timeswithin the kinematic perspective on jamming, for example,in Ref. �9�. Our careful analysis of the conditions for jam-ming in the next section will elucidate why this is correct forspheres but not necessarily correct for nonspherical particles,and under what conditions a hypoconstrained packing can bejammed.
The example in Fig. 5 is a geometrically degenerate con-figuration which would usually be dismissed as aprobability-zero configuration. However, we will explain inlater sections why such apparently nongeneric �degenerate�configurations must appear for sufficiently small aspect ra-tios for a variety of realistic packing protocols. In Ref. �33�geometrically peculiar examples such as this one are pre-sented, however, they are considered to be in unstable equi-librium, i.e., stable only under special types of loading. Thistype of argument, made within the static perspective on jam-ming �see Eq. �7��, is given in the context of granular mate-rials in Ref. �7�: “The number of equilibrium equations Ndshould not exceed the number of force variables Nc; other-wise these forces would be overdetermined.” The example inFig. 5 demonstrates why this argument cannot be applied to
FIG. 5. �Color online� A mobile ellipse �green� jammed betweenthree fixed ellipses �yellow�. All ellipses are of the same size andhave an aspect ratio �=2. This packing was produced by aLubachevsky-Stillinger–type algorithm, where the three particleswere kept fixed by giving them infinite mass and no initial veloci-ties. The normal vectors at the points of contact intersect at a com-mon point I, as is necessary to achieve torque balance. For thecorresponding disk example, shown in Fig. 7, the number of forcebalance constraints is two, while the number of unknown forces isthree. For the ellipse case the number of unknown forces is thesame, while the number of force balance constraints is two, and thenumber of torque constraints is one, giving a total of three equilib-rium constraints. However, due to the geometric degeneracy, thereare only two independent equations of mechanical equilibrium; thetorques are always balanced. In the notation described in Sec.V A 2, for the ellipse example above Nstresses=Nfloppy=1, while forthe corresponding disk case, Nstresses=1 but Nfloppy=0.
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-13

nonspherical grains. Since the normal vectors at the points ofcontact intersect at a point, a torque around that point cannotbe resolved by any set of normal forces between the par-ticles. Yet the packing is jammed, and if built in the labora-tory it will resist the torque by slight deformations of theparticles, so that the normal vectors no longer intersect inone point and the contact forces can resist the applied torque.The connection between the geometry of the contact net-work, i.e., A, and the packing configuration Q, as well as thepre-existing stresses �forces� in the packing, must be takeninto account when considering the response of hypocon-strained packings to external perturbations. This importantobservation was also recently pointed out independently inRef. �20�, and we elaborate on it in the next section.
V. CONDITIONS FOR JAMMING
In this section we develop first- and second-order condi-tions for jamming, using a kinematic approach. Statics�forces� will emerge through the use of duality theory. Thediscussion here is an adaptation of the theory of first-order,prestress, and second-order rigidity developed for tensegri-ties in Ref. �12�. This section is technical and may beskipped or skimmed by readers not interested in the math-ematical formalism of jamming. In Sec. VIII the rigoroushard-particle results are explained more simply by consider-ing the conditions for local �stable� energy minima in soft-particle systems.
We consider an analytic motion of the particles
�Q�t� = Qt + Qt2
2+ O�t3� ,
where Q are the velocities, and Q are the accelerations. Ex-panding the distances between touching particles to second-order, and taking into account that �QJ�=0, gives
�t� � ATQt + �QTHQ + ATQ�t2
2= t +
t2
2, �9�
where the Hessian H=�Q2 =�QA can be thought of as a
higher-rank symmetric matrix.
A. First-order terms
Velocities Q�0 for which =ATQ0 represent a first-order flex �using the terminology of Ref. �12��. If we can find
an unjamming motion Q such that �0 �note the strict in-equality�, then the packing is first-order flexible, and thereexists a T�0 such that none of the impenetrability condi-
tions �see Eq. �6�� are violated for 0� t�T. We call such a Qa strict first-order flex. If, on the other hand, for at least one
constraint �0 for every Q, then the packing is jammed,since every nontrivial movement of the particles violatessome impenetrability condition for all 0� t�T for some T�0. We call such a packing “first-order jammed.” Finally, a
Q such that =0 is a null first-order flex, often referred to aszero or floppy mode in the physics literature.
A packing is first-order jammed if and only if there are no�nontrivial� first order flexes. A packing is first-order flexibleif there exists a strict first-order flex. Some packings areneither first-order jammed nor first-order flexible; one mustconsider higher-order terms to access whether such packingsare jammed, and if they are not, to identify an unjammingmotion. We will consider the second-order terms later; in thissection we develop conditions and algorithms to verify first-order jamming and identify first-order flexes if they exist.The algorithms are closely based on work in Ref. �11�.
1. Strict self-stresses
Let us first focus on a single contact �i , j, and askwhether one can find a first-order flex that is strict on thatcontact, i.e.,
ij = �ATQ�ij = �ATQ�Teij = �Aeij�TQ � 0,
where eij denotes a vector that has all zero entries other thanthe unit entry corresponding to contact �i , j. If it exists, sucha flex can be found by solving the linear program �LP�
maxQ
�Aeij�TQ
ATQ 0 . �10�
If this LP has optimal objective value of zero, then there isno first-order flex that is strict on the contact in question.Otherwise, the LP is unbounded, with an infinite optimalobjective value. The dual LP of Eq. �10� is a feasibility prob-lem
A�f + eij� = 0
f 0, �11�
where the contact forces f are the Lagrange multipliers cor-
responding to the impenetrability constraints ATQ0. If thedual LP �11� is feasible, then the primal LP �10� is bounded.
If we identify f= f+eij 0, f i j 1, we are naturally led toconsider the existence of nontrivial solutions to the force-equilibrium equations
Af = 0 and f 0 . �12�
A set of non-negative contact forces f�0 that are in equi-librium as given by Eq. �12� is called a “self-stress”�38�. InRef. �12� these are called “proper self-stresses,” as opposedto self-stresses which are not required to be non-negative.Self-stresses can be scaled by an arbitrary positive factor, sowe will often add a normalization constraint that the averageforce be unity, eTf=M. A self-stress that is strictly positive ona given contact is strict on that contact. A self-stress f�0 isa strict-self stress. The existence of a �strict� self-stress canbe tested by solving the linear program
maxf,�
� ,
Af = 0 ,
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-14

f �e ,
eTf = M �13�
and seeing whether the optimal value is negative �no self-stress exists�, positive �a strict self-stress exists�, or zero �aself-stress exists�. What we showed above using linear dual-ity is that if there is a self stress that is strict on a givencontact, there is no flex strict on that contact. In particular,this means that packings that have a strict self-stress can onlyhave null first-order flexes.
We can also show that there is a first-order flex that isstrict on all contacts that do not carry a force in any self-stress �i.e., no self-stress is strict on them�. To this end, welook for a first-order flex that is strict on a given subset of thecontacts, as denoted by the positions of the unit entries in thevector e
maxQ,�
� ,
ATQ �e . �14�
The dual program is the feasibility problem
Af = 0 ,
eTf = 1,
f 0 , �15�
which is infeasible if there is no self-stress that is positive onat least on the contacts under consideration, since eTf0.Therefore the primal problem �13� is unbounded, that is, onecan find a self-stress that is strict �since �→�� on the givenset of contacts. This shows that packings that do not have aself-stress are first-order flexible. In other words, the exis-tence of force chains in a packing is a necessary criterion forjamming.
In summary, if a packing has no self-stress, it is notjammed, and one can easily find a strict first-order flex bysolving a linear program �11�. The analysis is simplified ifthe packing has a strict self-stress, since in that case all first-order flexes are null, i.e., they are solutions of a linear system
of equalities ATQ=0. This is the case of practical importanceto jammed packings, so we will focus on it henceforth.
2. Floppy modes
The linear system ATQ=0 has Nfloppy=Nf −r solutions,where r=M −Nstresses is the rank of the rigidity matrix, andNstresses is the number of �not necessarily proper� self-stresses�more precisely, the dimensionality of the solution space ofAf=0�. We know that Nstresses1 for a jammed packing. Ifthe packing is not hypoconstrained, or more precisely, if thenumber of contacts is sufficiently large
M = Nf + Nstresses Nf + 1,
then there are no nontrivial null first-order flexes �floppymodes�, Nfloppy=0. Therefore, a packing that has a strict self-
stress and a rigidity matrix of full-rank is �first-order�jammed. We will later show that this sufficient condition forjamming is also necessary for sphere packings, that is,jammed sphere packings are never hypoconstrained.
However, we will see that jammed ellipsoid packings maybe hypoconstrained, M �Nf +1. Such a hypoconstrainedpacking always has floppy modes,
Nfloppy = Nf + Nstresses − M Nf + 1 − M .
Every floppy mode can be expressed as a linear combinationof a set of Nfloppy basis vectors, i.e.,
Q = Vx for some x , �16�
where the matrix V is a basis for the null-space of AT. Todetermine whether any of the null first-order flexes can beextended into a true unjamming motion, we need to considersecond-order terms, which we do next.
B. Second-order terms
Consider a given null first-order flex ATQ=0. We want to
look for accelerations Q that make the second-order term inthe expansion �9� non-negative, i.e.,
ATQ − QTHQ . �17�
If we cannot find such a Q for any first-order flex, then the
packing is second-order jammed. If we find a Q such that allinequalities in Eq. �17� are strict, than we call the unjamming
motion �Q ,Q� a strict second-order flex, and the packing issecond-order flexible, since there exists a T�0 such thatnone of the impenetrability conditions �see Eq. �6�� are vio-
lated for 0� t�T. If for all first-order flexes Q at least oneof the inequalities in Eq, �17� has to be an equality, then weneed to consider even third-or higher-order terms, however,we will see that for sphere and ellipsoid packings this is notnecessary.
1. The stress matrix
In order to find a strict second-order flex, we need to solvethe LP
maxQ,�
�
ATQ �e − QTHQ , �18�
the dual of which is
minf
�QTHQ�Tf ,
Af = 0 ,
eTf = 1,
f 0 , �19�
where the common optimal objective function is
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-15

�* = �QTHQ�Tf = QT�Hf�Q = QTHQ ,
where H=Hf is a form of reduced Hessian that incorporatesinformation about the contact force and the curvature of thetouching particles. The �Nf �Nf� matrix H plays an essentialrole in the theory of jamming for hypoconstrained ellipsoidpacking and we will refer to it as the stress matrix followingRef. �12�.
The stress-matrix has a special block structure, where allof the blocks are of size �df �df�, and both the block-rowsand the block-columns correspond to particles. The blockentry corresponding to the pair of particles �i , j� is nonzero ifand only if there is a contact between them. Written explic-itly, the stress matrix is a force-weighted sum of contribu-tions from all the contacts
H = ��i,j
f ijHij ,
where the contribution from a given contact �i , j is
i ¯ j ,
↓ ¯ ↓ ,
Hij =
i→]
j→ ��ii2 ij ¯ � ji
2 ij
] � ]
�ij2 ij ¯ � j j
2 ij . �20�
If QTHQ�0 then �*�0 and therefore the first-order flex
Q cannot be extended into a second-order flex. We say that
the stress matrix blocks the flex Q. If, on the other hand,
QTHQ�0, then �*�0 and by solving the LP �18� we canfind an unjamming motion, i.e., the packing is second-orderflexible. Therefore, finding an unjamming motion at thesecond-order level essentially consists of looking for a null
first-order flex �floppy mode� Q, ATQ=0, that is also a posi-tive curvature vector for the stress matrix.
Recalling that every floppy mode can be expressed as Q=Vx �see Eq. �16��, we see that
QTHQ = xT�VTHV�x = xTHVx .
If the matrix HV is negative definite, than the packing issecond-order jammed. In Ref. �12� such packings are calledprestress stable, since the self-stress f rigidifies the packing�i.e., blocks all of the floppy modes�. If HV is indefinite, thanthe packing is second-order flexible since any of the positive-curvature directions can be converted into a strict self-stressby solving the LP �18�.
If a packing has more than one �proper� self-stress, than itis not clear which one to use in the stress-matrix. One can tryto find a self-stress that provides for jamming �prestress sta-bility� by looking for a solution to Eq. �13� such that HV�0 �i.e., HV is negative-semidefinite�. This is known assemidefinite programming �SDP�, and is a powerful gener-alization of linear programming that has received lots of at-tention recently �39�. It is, however, possible that differentself-stresses are needed to block different portions of the
space of floppy modes, and this general case of a second-order jammed packing is difficult to test for algorithmically.In our study of disordered sphere and ellipsoid packings, wewill see that in practice the jammed packings only have onestrict self-stress. In this case, testing for jamming reduces tocalculating the smallest eigenvalue of HV. We will discussactual numerical algorithms designed for ellipsoid packingsin subsequent sections, but first we explain what makessphere packings special.
2. The stress matrix for hard spheres
For hard spheres it is easy to write down the explicit formfor Hij since the overlap function is given explicitly by Eq.�4� and its second-order derivatives are trivial,
�ii2Fij = � j j
2 Fij = − �ij2 Fij = − � ji
2 Fij =2Id
�Oi + Oj�2 ,
where Id is the �d�d� identity matrix. This implies that Hij
is a positive-definite matrix, since
RTHijR = �ri − r j�T�ri − r j� 0.
Therefore, any first-order flex in fact represents a true unjam-
ming motion, since QTHQ0 and we can trivially use Q=0 in Eqs. �18�. In other words, a sphere packing is jammedif and only if it is first-order jammed, and therefore it cannotbe hypoconstrained. To test for jamming in hard-spherepackings we need only focus on the velocities of the spherecentroids and associated linear programs in Sec. V A. Thisimportant conclusion was demonstrated using a simple cal-culation in Ref. �11�.
For general particle shapes, however, Hij may be indefi-nite for some contacts, and testing for jamming may requireconsidering second-order terms. If one considers generalconvex particle shapes but freezes the orientations of theparticles, the packing will behave similar to a hard-spherepacking. In particular, a jammed packing of nonsphericalparticles must have at least as many contacts as the corre-sponding isoconstrained packing of spheres would, that is
Z 2d
for any large jammed packing of convex hard particles.
C. Testing for jamming
We now summarize the theoretical conditions for jam-ming developed in this section in the form of a procedure fortesting whether a given packing of nonspherical particles isjammed. We assume that the contact network of the packingis known and available as input. For spherical particles, asalready discussed, second-order terms never need to be con-sidered, and testing for jamming can be done by solving oneor two linear programs, as discussed in detail in Ref. �11�. Inthe formulation below, we avoid solving linear programs un-less necessary, but rather use basic linear algebra tools when-ever possible.
�1� Find a basis F for the null-space of the rigidity matrixA, i.e., find Nstresses linearly independent solutions to the lin-
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-16

ear system of equations Af=0, normalized to mean of unity.This can be done, for example, by looking for zero eigenval-ues and the associated eigenvectors of the matrix ATA. If �a�Nstresses=0, �b� Nstresses=1 but the unique self-stress is notnon-negative, or �c� Nstresses�1 but the linear feasibility pro-gram �13� is infeasible, then declare the packing not jammed�first-order flexible�, optionally identify an unjamming mo-
tion by solving the linear feasibility program ATQe, andterminate the procedure. Otherwise, if the identified self-stress f is not strict, declare the test inconclusive and termi-nate.
�2� If Nfloppy=Nf +Nstresses−M =0, then declare the packing�first-order� jammed and terminate the procedure. Otherwise,find a basis V for the null-space of AT, i.e., Nfloppy linearlyindependent solutions to the linear system of equationsAT�Q=0. Compute the stress matrix H using thepreviously-identified strict self-stress f, and compute its pro-jection HV on the space of null first-order flexes.
�3� Compute the smallest eigenvalue �min and associatedeigenvector xmin of the matrix HV. If �min�0, declare thepacking �second-order� jammed and terminate the procedure.If �min�0 and Nstresses=1 declare the packing not jammed�second-order flexible�, optionally compute an unjamming
motion by solving the LP �18� with Q=Vxmin, and terminatethe procedure. Otherwise, declare the test inconclusive andterminate.
We will discuss the actual numerical implementation ofthis algorithm later, and see that in practice we do not need tosolve linear programs to test for jamming in hypoconstrainedellipsoid packings. Essentially, the packings we encounter inour work with disordered packings of hard ellipsoids alwayshave a single strict self-stress and a negative-definite HV. Therectangular lattice of ellipses offers a different kind of ex-ample, namely, one with simple regular geometry but mul-tiple self-stresses, and we analyze this example theoreticallyin the Appendix.
D. Outside the kinematic perspective
It is worthwhile to briefly consider the connections be-tween the jamming criteria developed above using the kine-matic approach to jamming, and the static and perturbationapproaches.
1. Static view
We have already seen that forces appear naturally asLagrange multipliers corresponding to impenetrability con-straints, in the form of a strict self-stress f�0. In the staticview, we ask whether a packing can support a given appliedexternal force B by a set of non-negative interparticle forces.The key observation is that we can add an arbitrary positivemultiple of a self-stress to any set of interparticle forces thatsupport B in order to make them non-negative, without af-fecting force balance. Therefore, if the rigidity matrix A is offull rank, as it has to be for jammed sphere packings, any�supportable� load B can be balanced with non-negative in-terparticle forces, and kinematic and static rigidity becomeequivalent �40�.
The addition of arbitrary multiples of the self-stress to fis, however, a product of the mathematical idealization of thepacking. In fact, each specific applied load in an isocon-strained packing with M =Nf +1 contacts will be supportedby a well-defined f. The self-stress is only physical if allNf +1 contacts are active, which requires that the packingalready be compressed by some pre-existing applied load.Otherwise, the density will be slightly smaller than the jam-ming density and upon application of an external load one ofthe contacts will break and only Nf of the contacts will beactive. In general, finding the active set of contacts requiressolving the linear program �11�
minf
eTf for virtual work
such that Af = − B for equilibrium
f 0 for repulsion only. �21�
At the solution, modulo degenerate situations, only Nf of theforces will be positive, the remaining ones will be zero.
For jammed hypoconstrained ellipsoid packings, such asthe one in Fig. 5, supporting some loads may require a smalldeformation of the packing, such as a slight rotation of themobile ellipse in the example in Fig. 5. After this small de-formation, the normal vectors at the points of contact willchange slightly and the interparticle forces f can support theapplied force B. The larger the magnitude of the forces is,the smaller the deformation needed to support the load is.Therefore every jammed packing can support any appliedforce in a certain generalized sense. Another way to look atthis is to observe that, if the interparticle forces are muchlarger than the applied ones, the applied load will act as asmall perturbation to the packing and the static view be-comes equivalent to the perturbation view �with � =0�. Weconsider the perturbation view next and show how the stressmatrix appears in the response of the packing to perturba-tions.
2. Perturbation view
In the perturbation view we consider how the configura-tion and the contact forces respond to perturbations consist-ing of small changes of the contact geometry and small ap-plied forces. Counting geometric and force constraintsseparately, as done in the literature, is incorrect when f�0:There is coupling between the particle positions and the in-terparticle forces as represented by the Hessian H=Hf.
With this in mind, we can expand Eq. �8� to first order in���Q� , ��f�, to get the linear system of equations
�A − H 0
0 AT − 2e
e 0 0 � �f
�Q
�� = − ���B
�
0 . �22�
It can be demonstrated that if the reduced Hessian HV isdefinite, this system will have a solution for any �B and � .Furthermore, if HV is negative-definite the response to per-turbations will be stable, in the sense that applied forces willdo a positive work in order to perturb the packing. This is
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-17

explained in greater detail in Ref. �20�, where the conditions��Q�=O���B�� and �BT�Q�0 are stated in a more generalsetting, and then a linearization of the response of the pack-ing to perturbations is considered �recall that in Ref. �20�� 0�.
Equation �22� can be used to find the jamming point start-ing with a packing that is nearly jammed, i.e., a packing thathas nonzero interparticle gaps �� and a self-stress that hasa small imbalance ��B=Af. This works well for small pack-ings, however, for large disordered packings, the force chainsare very sensitive to small changes in the geometry and thelinearization of the perturbation response is not a good ap-proximation even for packings very close to the jammingpoint. Additionally, we note that to first order in �, the solu-tion to Eq. �22� has �� /�= fT� /2M = fE
Th /2M, which canbe used to quickly estimate the jamming gap of a nearlyjammed packing from just the interparticle gaps � = andthe interparticle forces, without knowing the actual jammingpoint �2�.
VI. NUMERICALLY TESTING FOR JAMMING INHYPOCONSTRAINED ELLIPSOID PACKINGS
In this section we will apply the criteria for jamming andthe algorithm to test for jamming from Sec. V C to our com-putationally generated hypoconstrained packings of ellip-soids. This section is technical and may be skipped orskimmed by readers not interested in the mathematical for-malism of jamming. The numerical results show that thepackings are indeed second-order jammed, even very closeto the sphere point. Before discussing the numerical detailsof the algorithm, we need to calculate the first and second-order derivatives of the overlap potential for ellipsoids.
A. Overlap potentials for ellipsoids
Numerical algorithms for calculating the PW overlap po-tential =�2−1 for ellipsoids are presented in the secondpart of Ref. �15�. Here we review the essential notation andgive the first and second-order derivatives of the overlap po-tential, necessary to build the rigidity and stress matrices fora given packing.
An ellipsoid is a smooth convex body consisting of allpoints r that satisfy the quadratic inequality
�r − r0�TX�r − r0� � 1, �23�
where r0 is the position of the center �centroid�, and X is acharacteristic ellipsoid matrix describing the shape and ori-entation of the ellipsoid
X = QTO−2Q , �24�
where Q is the rotational matrix describing the orientation ofthe ellipsoid, and O is a diagonal matrix containing the majorsemi-axes of the ellipsoid along the diagonal. Consider twoellipsoids A and B and denote
Y = �XB−1 + �1 − ��XA
−1, �25�
where � is defined in Sec. III. The contact point rC of the twoellipsoids is
rC = rA + �1 − ��XA−1n = rB − �XB
−1n , �26�
where
n = Y−1rAB �27�
is the un-normalized common normal vector at the point ofcontact.
In principle the overlap potential is a function of the nor-malized quaternions describing the particle orientations, andderivatives of need to be projected onto the unit quaternionsphere. This projection can be avoided if we do not do atraditional Taylor series in the quaternions, namely, an addi-tive perturbation �q, but rather consider a multiplicative per-turbation to the quaternions in the form of a small rotationfrom the current configuration ��.
1. First-order derivatives
The gradient of the overlap potential, which enters in thecolumns of the rigidity matrix, can be shown to be
�B = − �A = ��rB
��B � = 2��1 − ��� n
rBC � n� ,
as we derived in Sec. III A 1 for a general convex particleshape by using the normalized normal vector n=n / �n� �notethat =��1−��rAB
T n−1=0�. Additionally, it is useful to knowthe derivatives of �,
�rB� = −
2
f��
n ,
where
f�� = 2rBC
T Y−1rAC
��1 − ��� 0,
n = �nB + �1 − ��nA = �Y−1rAC + �1 − ��Y−1rBC
and
��B� = −
2
f��
�MBnA − ��rBC � n�� ,
where
MB = �NLXB−1 + RCB
L .
2. Second-order derivatives
The explicit expressions for the Hessian of the overlappotential are
�rB
2 = 2��1 − ��Y−1 −4
f��
�nnT� � 0 ,
��BrB
2 = 2��1 − ��MBY−1 + 2����B��nT�
and finally
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-18

��B
2 = − f������B�����B
��T�
+ 2��1 − ����1
2�rBCnT + nrBC
T � − �rBCT n�I�
+ �NLXB−1NR + MBY−1MB
T� .
The derivatives with respect to the position and orientationof particle A can be obtained by simply exchanging the rolesof particles A and B, however, there are also mixed deriva-tives involving motion of both particles
��BrA
2 = − ��BrB
2
��ArB
2 = − ��ArA
2
��B�A
2 = − ��B
2 + ���BrB
2 �RABR −
1
2���B
��.
The stress-matrix is built from these blocks as given in Eq.�20�, where each of the four blocks ���
2 �� and � denoteeither A or B� involves both translations and rotations,
���2 = � �r�
2 ���r�
2
�r���
2 �r�
2 � .
B. Numerically testing for jamming
The numerical implementation of the algorithm given inSec. V C poses several challenges. The most important issueis that that algorithm was designed for ideal packings, that is,it was assumed that the true contact network of the packingis known. Packings produced by the MD algorithm, althoughvery close to jamming �i.e., very high pressures�, are notideal. In particular, it is not trivial to identify which pairs ofparticles truly touch at the jamming point. Disordered pack-ings have a multitude of near contacts that play an importantrole in the rigidity of the packing away from the jammingpoint �41�, and these near contacts can participate in thebackbone �force-carrying network� even very close to thejamming point. Additionally, not including a contact in thecontact network can lead to the identification of spuriousunjamming motions, which are actually blocked by the con-tact that was omitted in error.
For hard spheres, the algorithms can use linear program-ming to handle the inclusion of false contacts �11�. For ellip-soids, we look at the smallest eigenvalues of ATA, i.e., theleast-square solution to Af=0. The solution will be positiveif we have identified the true contact network, f�0, but theinclusion of false contacts will lead to small negative forceson those false contacts. The problem comes about becausethe calculation of the self-stress by just looking at the rigiditymatrix does not take into account the actual proximity tocontact between the particles. One way to identify the truecontact network of the packing is to perform a long molecu-lar dynamics run at a fixed density at the highest pressurereached, and record the list of particle neighbors participat-
ing in collisions as well as average the total transfer of col-lisional momentum between them in order to obtain the�positive� contact forces �2�.
Once the contact network is identified, we want to lookfor null vectors of the rigidity matrix. This can be done usingspecialized algorithms that ensure accurate answers �42�,however, we have found it sufficient in practice to simplycalculate the few smallest eigenvalues of the semi-definitematrix ATA. We used MATLAB’s sparse linear algebra tools toperform the eigenvalue calculation �internally MATLAB usesthe ARPACK library, which implements the implicitly re-started Arnoldi method�. We consistently found that thesmallest eigenvalue is about 3−6 orders of magnitudesmaller than the second-smallest eigenvalue, indicating thatthere is a near linear-dependency among the columns of A inthe form of a self-stress. The self-stress, which is simply theeigenvector corresponding to the near-zero eigenvalue, wasalways strictly positive; in our experience, disordered pack-ings of ellipsoids have a unique strict self-stress f. Thismeans that there are Nfloppy=Nf +1−M solutions to AT�Q=0, Nf −M of which are exact, and one which is approximate�corresponding to the approximate self-stress�. This can beseen, for example, by calculating the eigenvalues of AAT,since Nf −M will be zero to numerical precision, one will bevery small, and the remaining ones will be orders of magni-tude larger.
Verification of second-order jamming. Once a strict self-stress is known, second-order jamming or flexibility can bedetermined by examining the smallest eigenvalue of HV,which requires finding a basis for the linear space of floppymodes. However, it is computationally demanding to find abasis for the null-space of AT due to the large number offloppy modes, and since sparsity is difficult to incorporate innullspace codes. There are algorithms to find sparse basis forthis null-space �42�, however, we have chosen a differentapproach.
Namely, we calculate the smallest eigenvalues of
Hk = kAAT − H ,
which as we saw in Sec. VIII B is the Hessian of the poten-tial energy for a system of deformable ellipsoids where thestiffness coefficients are all k. For very large k �we use k=106�, any positive eigenvalue of AAT is strongly amplifiedand not affected by H, and therefore only the floppy modescan lead to small eigenvalues of Hk, depending on how theyare affected by H. We have found that MATLAB’s eigs func-tion is not able to converge the smallest eigenvalues of Hkfor large stiffnesses k, however, the convergence is quick ifone asks for the eigenvalues closest to zero or even closest to−1. This typically reveals any negative eigenvalues of Hkand the corresponding floppy modes.
It is also possible to perform a rigorous numerical test forpositive-definiteness of Hk using properly rounded IEEE ma-chine arithmetic and MATLAB’s �sparse� Cholesky decompo-sition of a numerically reconditioned Hk �43�. We have usedthe code described in Ref. �43� to show that indeed for ourpackings Hk�0 and therefore the packings are second-orderjammed. For spheroids, that is, ellipsoids that have an axesof symmetry, there will be trivial floppy modes correspond-
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-19

ing to rotations of the particles around their own centroid.These can be removed most easily by penalizing any com-ponent of the particle rotations �� that is parallel to the axisof symmetry. For example, one can add to every diagonalblock of Hk corresponding to the rotation of an ellipsoid withaxes of symmetry u a penalization term of the form kuuT.
We have not performed a detailed investigation of a verywide range of samples since our goal here was to simplydemonstrate that under appropriate conditions the packingswe generate using the modified Lubachevsky-Stillinger algo-rithm are indeed jammed, even though they are very hypo-constrained near the sphere point. In this work we have giventhe fundamentals of the mathematics of jamming in thesepackings. A deeper understanding of the mechanical and dy-namical properties of nearly jammed hypoconstrained ellip-soid packings is a subject for future work.
VII. NEARLY JAMMED PACKINGS
So far we have considered ideal jammed packings, whereparticles are exactly in contact. Computer-generated pack-ings however always have a packing fraction � slightlylower than the jamming packing fraction �J, and the par-ticles can rattle �move continuously� to a certain degree ifagitated thermally or by shaking �2�. We can imagine that westarted with the ideal jammed packing and scaled the particlesizes by a factor �=1−��1, so that the packing fraction islowered to �=�J�1−��d. We call � the jamming gap or dis-tance to jamming.
It can be shown that if � is sufficiently small the rattlingof the particles does not destroy the jamming property, in thesense that the configuration point Q=QJ+�Q remainstrapped in a small jamming neighborhood or jamming basinJ�Q�RNf around QJ, which can be shown rather generallyusing arguments similar to those in Ref. �13� for tensegrities.In the limit �→0 the set of accessible configurations J�Q→ �QJ, and in fact this is the definition of jamming used bySalsburg and Wood in Ref. �44�. Rewritten to use our termi-nology, this definition is: “A configuration is stable if forsome range of densities slightly smaller than �J, the configu-ration states accessible from QJ lie in the neighborhood ofQJ. More formally, if for any small ��0 there exists a ��0 such that all points Q accessible from QJ satisfy �Q−QJ��� provided ��J�1−��d.” We call this the trappingview of jamming, most natural one when considering thethermodynamics of nearly jammed hard-particle systems�45�. Note that the trapping definition of jamming is in factequivalent to our kinematic definition of jamming �13�.
To illustrate the influence of the constraint curvature onjamming, we show in Fig. 6 four different cases with twoconstraints in two dimensions. In all cases a self-stress existssince the normals of the two constraints are both horizontal.If both constraint surfaces are concave �have negative or out-ward curvature�, as constraints always are for hard-spheres,two constraints cannot close a bounded region J�Q aroundthe jamming point. One needs at least three constraints andin that case J�Q will be a curved triangle. If however at leastone of the constraints is convex �has positive curvature�, twoconstraints can bound a closed jamming basin. Specifically,
if the sum of the radii of curvatures of the two constraints atthe jamming point R1+R2 is positive, there is no unjammingmotion. On the other hand, if it is negative then there is anunjamming motion in the vertical �floppy� direction. This isequivalent to looking at the smallest eigenvalue of the stressmatrix in higher dimensions.
The jamming basin J�Q��� for a given jamming gap � isthe local solution to the relaxed impenetrability equations
��Q� − � = 1 − � 1
1 − ��2
.
One way to determine J�Q��� for a wide range of �’s is toconsider the function of the particle displacements
���Q� = �1 + min� ��Q�� − 1, �28�
that is, to calculate by how much the particles need to beshrunk to make a given particle displacement �Q feasible�preserving nonoverlapping�. The contours �level-sets� of the
function ���Q� denote the boundaries of J�Q���, that is,
J�Q���= ��Q � ���Q���.
A. First-order jammed packings
As a simple but illustrative example, we will consider asingle mobile disk jammed between three other stationarydisks, as shown in Fig. 7, an analog of the ellipse examplefrom Fig. 5. This packing is first-order jammed, and the fig-
ure also shows a color plot of the function ���Q� along withits contours. It is seen that for small � the jamming basinJ�Q is a closed curved triangle.
These observations are readily generalized to higher di-mensions. For sufficiently small �, the jamming basin ap-
FIG. 6. �Color online� The feasible region around a jammingpoint �black circle� for two curved constraints in two dimensions�black circles�. The region of the plane forbidden by one of theconstraints is colored red and colored blue for the other constraint.The region forbidden by both constraints is purple. The distancefrom the jamming point to the constraints is approximately � andchosen small. Four cases are shown, going from left to right. �a�Both constraints are concave and the region is not bounded. Movingalong the vertical direction unjams the system �this is typical ofhard spheres�. �b� Both constraints are convex and the yellow re-gion is closed, even though it is very elongated along the verticaldirection �of order ���. This is an example of pre-stress stability�second-order jamming�. �c� One of the constraints is convex, butnot enough to block the unjamming motion in the vertical direction.The motion has to curve to avoid the convex constraint, i.e., anonzero acceleration is needed to unjam the system �second-orderflexible�. �d� Only one of the constraints is convex, but enough toclose the yellow region �second-order jammed�. If the radii of cur-vatures R1 and R2 are very close in magnitude, this region canbecome a very elongated bananalike shape.
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-20

proaches a convex jamming polytope �a closed polyhedronin arbitrary dimension� P�Q. For spheres all constraint sur-faces are concave and therefore P�Q�J�Q �44,46�. Thejamming polytope is determined from the linearized impen-etrability equations
AT�Q − � � − 2� , �29�
and we can see that its volume, which determines the �non-equilibrium� free-energy, scales as �Nf. This leads to the free-volume divergence of the pressure in the jamming limit
p =PV
NkT�
df
1 − �/�J, �30�
which has been verified numerically for disordered isocon-strained hard sphere packings �2�.
B. Second-order jammed packings
The ellipse analog from Fig. 5 has three degrees of free-dom, two translational and one orientational. If we fix theorientation of the �mobile� ellipse, that is, we take a planar
cut through ���Q�, the situation is identical to that for thedisk example above: For small � the jamming basins J�Q areclosed curved triangles. However, the range of accessibleorientations is rather large, on the order of ��, since even fora small � the ellipse can rotate significantly. This is a conse-quence of the rotation of the ellipse being a floppy mode, andonly being blocked by second-order effects as given by thecurvature of the impenetrability constraints. In a certainsense, the packing is trapped to a greater extent in the sub-space of configuration space perpendicular to the space offloppy modes than it is in the space of floppy modes. This isillustrated in Fig. 8.
C. Pressure scaling for hypostatic jammed ellipsoid packings
The observations in Fig. 8 are readily generalized tohigher dimensions, however, it is no longer easy to determine
the volume of J�Q �and thus the free energy� in the jamminglimit. If we consider the simple two-constraint example inFig. 6, we find that the area A of the feasible region scalesas �3/2 instead of �2,
A =16
3� R1R2
R1 + R2�3/2.
An obvious generalization of this result to higher dimensionscan be obtained by assuming that the jamming basin J�Q hasextent �� along all Nfloppy�Nf −M directions correspondingto floppy modes, where as it has extent � along all otherperpendicular directions. The volume would then scale as
�J�Q� � �M��Nf−M�/2 = �N�df/2+Z/4� = �Ndf�1+s�/2,
where we quantify the hypostaticity of the packing by s
= Z /2df. The corresponding scaling of the pressure in thejamming limit is
p =PV
NkT�
df�1 + s�/21 − �/�J
.
However, as � becomes very small, the jamming regionbecomes so elongated along the space of floppy modes thatthe time-scales for rattling along the elongated directionsbecomes much larger than the time for rattling in the perpen-dicular directions. This manifests itself as a remarkably largeand regular oscillation of the “instantaneous” pressure �asmeasured over time intervals of tens of collisions per par-ticle� during molecular-dynamics runs at a fixed �, as illus-trated in Fig. 9. The oscillations are more dramatic thesmaller � is, and can span six or more orders of magnitudesof changes in the instantaneous pressure. The period ofoscillation, as measured in numbers of collisions per particle,is dramatically affected by the moment of inertia of the el-lipsoids I, most naturally measured in units of mO2, where mis the particle mass and O is the �say smallest� ellipsoidsemiaxis.
FIG. 7. �Color online� �Top� An example of a mobile disk jammed between three fixed disks. This is analogous to the ellipse packing
shown in Fig. 5. �Bottom� A color plot of the function ���Q� for this disk packing along with its contours �level sets�.
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-21

We do not understand the full details of these pressureoscillations, however, it is clear that dynamics near the jam-ming point for the hypoconstrained ellipsoid packings is notergodic on small time scales. In particular, as a packing iscompressed during the course of the packing algorithm, thetime scale of the compression may be shorter than the timescale of exploring the full jamming basin. Over shorter timescales the packing can only explore the directions perpen-dicular to the floppy modes, and in this case we expect thatthe pressure would scale as
p �dfs
1 − �/�J.
In Fig. 10 we show C= p�1−� /�J� as a function of the jam-ming gap for compressions of systems of ellipses of differentaspect ratios close to unity. The compression started with adense liquid and the particles were grown slowly at an ex-pansion rate �=10−5 to a high pressure �jamming� p=109.The figure shows for each aspect ratio the lower bound CL=dfs=3s and the upper bound CU=df�1+s� /2=1.5�1+s�,where s was calculated by counting the almost perfect con-
FIG. 8. �Color online� �Left� A plot of the function ���Q� for the packing from Fig. 5. The horizontal axes correspond to the translationaldegrees of freedom and the vertical to the rotational degree of freedom �the rotation angle of the major axes�. The �Q=0 cut is also shown�horizontal colored plane�, to be compared to the right part of Fig. 7. We also show the jamming basin J�Q��=0.0035� �dark blue region�,illustrating that this region is shaped like a banana, elongated along the direction of the floppy mode. �Right� Several contours �isosurfaces�of ���Q�, bounding the banana-shaped regions J�Q���.
0 2000 4000 6000Number of collisions (100s per particle)
p
I=1, δ=10−12
I=0.01, δ=10−12
I=1, δ=10−11
I=0.01, δ=10−11
I=1, δ=10−10
I=0.01, δ=10−10
1012
1011
1010
109
FIG. 9. �Color online� The “instantaneous” reduced pressure fora jammed hypoconstrained packing of three-dimensional ellipsoidswith semi-axes ratio 1.025−1: 1: 1.025, at different �estimated� dis-tances from the jamming point �. Molecular dynamics runs using anatural moment of inertia of the particles as well as ones using amuch smaller moment of inertia are shown. The pressure oscilla-tions are sustained for very long periods of time, however, it is notclear whether they eventually dissipate.
0.000001 0.00001 0.0001 0.001 0.01
1−φ/φJ
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
C=
p(1−
φ/φ J)
α=1α=1.01α=1.025α=1.05α=1.075α=1.1
FIG. 10. �Color online� The pressure scaling coefficient C= p�1−� /�J� as systems of hard ellipses are compressed from adense liquid to the jamming point. The value of C is not constant;however, it seems to remain between the bounds CL �shown with adashed line in the same color as C� and CU �shown with a solidline�.
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-22

tacts at the highest pressure �2�. As expected from the argu-ments above, we see that very close to the jamming pointC�CL, however, further away from jamming C�CU. Forpackings that are not hypoconstrained CL=CU=df, and fordisks CU=CL=2.
VIII. ENERGY MINIMA IN SYSTEMS OF DEFORMABLEPARTICLES
In this section we consider the connections between jam-ming in hard particle packings and stable �local� energyminima �inherent structures �23�� for systems of deformable�soft� particles. This has a twofold purpose. Firstly, in physi-cal systems particles are always deformable, and therefore itis important to establish that the hard-particle conditions forjamming we established in Sec. V are relevant to systems ofdeformable particles. We expect that if the particles are suf-ficiently stiff, to be made more quantitative shortly, the be-havior of the soft-particle system will approach that of thecorresponding hard-particle packing. Secondly, consideringthe conditions for the existence of a stable energy minimumwill enable us to derive in a simpler fashion and better un-derstand the jamming conditions from the previous section.
We consider systems with short-ranged continuous inter-particle potentials that are a monotonically decreasing func-tion E of the overlap between particles
Uij = E� �qi,q j�� . �31�
That is, we assume that the elastic behavior of the particles issuch that the interaction energy only depends on the distancebetween the particles as measured by the overlap potential .An example of such an elastic potential is an inverse powerlaw
E� � = �1 + �−�, �32�
which in the limit �→� approaches a hard-particle interac-tion
EH� � = �0 if � 0,
� if � 0.�
For sufficiently large power exponents � the interaction islocalized around particles in contact and the overall energy
U = �ij
Uij → maxij
Uij = �1 + minij
ij�−� = �1 + �2�−�
is dominated by the most overlapping pair of particles �see
Eq. �28� for the definition of ��. Additionally, as � grows theinterparticle potential becomes stiff in the sense that smallchanges in the distance between the particles cause largechanges of the interparticle force
f = −dE
d 0
and the stiffness coefficient
k =d2E
d 2 0
becomes very large and positive. This indicates a physicalinterpretation of the hard-particle interaction potential: It isthe limit of taking an infinite stiffness coefficient while theforce between particles is kept at some non-negative value,which can be tuned as desired by infinitesimal changes in thedistance between the particles �but note that the forces indifferent contacts are correlated since the motion of particlesaffects all of them simultaneously�.
A. Stable energy minima correspond to jammed packings
Assume that we have a packing of hard particles and thatwe can find a set of interparticle interaction potentials Uij forthe geometric contacts such that the configuration is a stableenergy minimum. This means that any motion of the par-ticles leads to increasing the energy U, i.e., to overlap ofsome pair of particles. Therefore, the packing of hard par-ticles is jammed. This gives a simple way to prove that agiven packing is jammed: Find a set of interparticle poten-tials that makes the configuration a stable energy minimum�12,13�. We examine the conditions for a stable energy mini-mum when the interaction potentials are twice differentiablenext.
The converse is also true, in the sense that arbitrarily neara jammed packing there is an energy minimum for a suffi-ciently “hard” interaction potential �in some cases the poten-tial energy U may have to be discontinuous at the origin�12��. We demonstrate this in the examples from Figs. 7 and8 for a power-law interaction potential with increasing expo-nent � in Figs. 11 and 12, respectively. It is clear that in thelimit p→�, the contours of the interaction potential become
those of ���Q� and are thus closed near the origin, i.e., theenergy has a minimum. The higher the exponent p is, how-ever, the more anharmonic the interaction potential becomesand the contours are no longer ellipsoidal near the energyminimum.
It should be emphasized that the energy minima in soft-particle systems have a variable degree of overlap betweenneighboring particles and therefore do not correspond tohard-particle packings. In particular, at large pressures or ap-plied forces the deformability of the particles becomes im-portant and the energy minima no longer have the geometricstructure of packings. However, in the limit of no externallyapplied forces, i.e., f→0, the only interacting particles arethose that barely overlap, i.e., that are nearly touching.Therefore energy minima for purely repulsive interaction po-tentials and a finite cutoff correspond to jammed packings ofhard particles in the limit of zero external pressure �alterna-tively, one can keep the applied forces constant and make thegrains infinitely stiff �6��. Therefore, the packings of softparticles studied in Ref. �3� very slightly above the “jammingthreshold” �c are closely related to collectively jammed idealpackings of spheres of diameter D=� �polydispersity istrivial to incorporate� �47�.
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-23

B. Hessian eigenvalues and jamming
It is well known that for smooth interactions a given con-figuration is a stable energy minimum if the gradient of theenergy is zero and the Hessian is positive definite, and theconverse is also true if positive definite is replaced with posi-tive semidefinite. This has been used as a criterion for jam-ming in systems of deformable particles �3,47�.
The gradient of U=�ijUij is
�QU = �ij
dE
d ij��Q ij� = ��Q ��� E� = A�� E� = − Af .
The first-order necessary condition for a stable energy mini-mum is therefore exactly the force/torque balance condition
Af = 0 and f 0,
as we derived using linear programming and duality theoryfor hard-particle packings. The Hessian is
�Q2 U = ��Q�� E��AT + ��Q
2 ��� E�
= �A�� 2E��AT + ��QA��� E�
= AKAT − Hf = AKAT − H ,
where K=� 2�=Diag�kij is an �M �M� diagonal matrix
with the stiffness coefficients along the diagonal, and H=�QA=�Q
2 is the Hessian of the overlap constraints. Notethat more careful notation with derivatives of vectors andmatrices can be developed and should in principle be em-ployed in calculations to avoid confusions about the order ofmatrix multiplications and transpositions �48�.
The Hessian
HU = �Q2 U = AKAT − H
consists of two terms, the stiffness matrix HK=AKAT, andthe stress matrix H that we already encountered in thesecond-order expansion of the impenetrability constraints.The importance of not neglecting the stress matrix is alsonoted independently in Ref. �20�, where also expressions aregiven for this matrix for certain types of contact geometry.
The second-order sufficient condition for a strict energyminimum is
HU � 0 .
Since K�0, the stiffness matrix HC is positive-semidefinite:For any vector �Q that is not a floppy mode, �QTHK�Q�0, while �QTHK�Q=0 if �Q is a floppy mode �i.e.,
FIG. 11. �Color online� The total interaction energy U��Q� for the example in Fig. 7 when the disks are deformable and interact via apower-law potential. We show U as a color plot with overlaid contours for power exponents �=12,25, and 100 �going from left to right�.Compare the �=100 case to the contours of ���Q� in Fig. 7.
FIG. 12. �Color online� The contours �isosurfaces� of the total interaction energy U��Q� for the example in Fig. 8 when the ellipses are
deformable and interact via a power-law potential. Going from left to right, we show �=12 and 25, as well as the hard ellipsoid ���Q�,corresponding to the limit �→�.
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-24

AT�Q=0�. Therefore, for any direction of particle motionthat is not a floppy mode, one can make the stiffness coeffi-cients large enough to make �QTHK�Q�0, regardless ofthe value of �QTH�Q. Floppy modes, however, correspondto negative curvature directions of the Hessian HU if they arepositive-curvature directions of the stress matrix,�QTH�Q�0. Therefore, the energy minimum is strict ifand only if the stress matrix is negative-definite on the spaceof floppy modes. This is exactly the same result as thesecond-order condition for jamming we derived in Sec. Vusing duality theory.
For deformable particles, the stiffness coefficients are fi-nite. Therefore, for sufficiently large interparticle forces, thestress matrix may affect the eigenspectrum of the HessianHU and therefore the stability of potential energy minima.For cohesionless �f�0� spheres, as we derived earlier, H�0 and therefore interparticle forces may only destabilizepackings: This is the well known result that increasing theinterparticle forces leads to buckling modes in sphere pack-ings �10�. Jamming in systems of soft spheres is thereforeconsidered in the limit of f→0, i.e., the point when particlesfirst start interacting �3,41�. For ellipsoids however, theforces can, and in practice they do, provide stability againstnegative or zero-frequency vibrational modes. The magni-tude of the forces becomes important, and will determine theshape of the density of states �DOS� spectrum �41� for smallvibrational frequencies. To quote from Ref. �10�, “ The basicclaim … is that one cannot understand the mechanical prop-erties of amorphous materials if one does not explicitly takeinto account the direct effect of stresses.”
The density of states �vibrational modes� in packings ofsoft spheres has been the subject of recent interest�41,49,50�. In particular, a Boson peak of low-frequencymodes has been identified and attributed to the marginal ri-gidity �isostaticity� of the packings �49�. The effect of pre-stresses �pressure� on the density of vibrational modes hasalso been studied �50�. Such studies should be carried outalso for packings of soft ellipsoids. In this case additionallow-frequency modes will appear due to the floppy modes,especially at low pressures and for nearly spherical ellip-soids. These floppy modes will affect the mechanical re-sponse of the system, and there will be a subtle interplaybetween the low-frequency modes due to the marginal rigid-ity and those that appear because of the floppy modes inher-ent to hypoconstrained systems.
C. An example of pre-stress stability
Figure 13 shows a very simple example in which pre-stressing, i.e., pre-existing forces, stabilize a structure. Al-though the example is not a packing, it illustrates well someof the essential features. First, the geometry of the system isdegenerate, since the two springs are exactly parallel. Thisdegeneracy insures that a self-stress exists, since one canstretch/compress both springs by an identical amount andstill maintain force balance.
Observe that geometrically the change in the position ofthe joint �x causes a quadratic change in the length of eachspring �l��x2. To balance an applied force F, the force
inside each spring f needs to be f�x=F. If the system is notprestressed, then the potential energy is quartic around theorigin, �U= 1
2k�l2� 12k�x4, and the applied force causes a
very large deformation of the structure �x= �F /k�1/3. Thestructure is stable �i.e., corresponds to a jammed packing�,however, its response to perturbations is not harmonic. If,however, there is an initial force f in the springs, then thepotential energy is quadratic around the origin �U� f�l= f�x2 and the deformation is linear in the applied force�x=F / f . If f �0, then the system is unstable and willbuckle, and if f �0 the system is stable and its response toperturbations is harmonic. This is exactly the form of stabil-ity that hypoconstrained ellipsoid packings have.
It is instructive to compare the simple example in Fig. 13with the example given in Fig. 5. In the latter there is also asingle floppy mode. Let the small displacement of the centralmobile particle along this floppy mode, due to an appliedtorque �, be �q. This involves both a small rotation and asmall displacement of the centroid, and causes a quadraticchange in the contact distances �l��q2. If the packing isprestressed by a slight compression �or expansion of the cen-tral ellipse�, so that the contact forces are a positive multipleof the self-stress, f=�fself, ��0, then the potential energy isquadratic, �U= fT�l���q2. The deformation needed to re-sist the applied torque is determined from �= fT�N=��q�fself
T �qN�, i.e., �q�� /�. Here �qN denotes the sensitivityof the normal vectors N �represented in a suitable matrixform� at the points of contact with respect to the position ofthe mobile ellipse. The response of the system is thereforestrongly dependent upon the magnitude of the pre-stress �,just as the response in the example in Fig. 13 is dependentupon f .
IX. PACKINGS OF NEARLY SPHERICAL ELLIPSOIDS
In this section we will consider nearly spherical ellip-soids, that is, ellipsoids with aspect ratio � close to unity. Inparticular, we try to understand why these packings are hy-poconstrained and to quantitatively explain the sharp rise inthe density and contact numbers of disordered packings asasphericity is introduced. We propose that the packings ofnearly spherical ellipsoids should be looked at as continuousperturbations of jammed disordered sphere packings, and es-tablish the leading order terms in the expansion around thesphere point.
A. Rotational and translational degreesof freedom are not equal
One might at first sight expect a discontinuous change inthe contact number, and therefore the structure, as aspheric-ity is introduced. After all, the number of degrees of freedomjumps suddenly from df =d to �for nonspheroids� df =d�d+1� /2�d. However, such an expectation is not reasonable.First, the number of degrees of freedom is df =d�d+1� /2even for spheres, since spheres can rotate too. This rotationdoes not affect the non-overlap conditions and therefore isnot coupled to translational degrees of freedom. If the ellip-soids are nearly spherical, particle rotation is only mildly
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-25

coupled to particle translations and rotation only affects thenon-overlap conditions very close to the jamming point. Thisis seen, for example, through a violation of the equipartitiontheorem in nonequilibrium MD simulations of hard ellip-soids, depending on the moment of inertia of the particlesand the time scale of the system evolution. We thereforeexpect that thermodynamically and kinetically, at least at thelevel of translations, systems of nearly spherical ellipsoidswill behave identically to systems of spheres until the inter-particle gaps become comparable to the difference betweenthe semiaxes. It is therefore not really surprising that the
properties of the jammed packings such as �J or Z changecontinuously with �.
What is somewhat surprising, however, is that �J and Zare not differentiable functions of particle shape. In particu-lar, starting with a unit sphere and changing a given semiaxesby +��1 increases the density linearly in �, and changing itby −� also increases the density by the same amount, ��J����. As we will show through our calculations, this nondif-ferentiability is a consequence of the breaking of rotationalsymmetry at the sphere point. The particle orientations them-selves are not differentiable functions of particle shape andchange discontinuously as the sphere point is crossed.
Finally, there is little reason to expect packings of nearlyspherical particles to be rotationally jammed. After all,sphere packings are never rotationally jammed, since thespheres can rotate in place arbitrarily. Similarly, near thejamming point, it is expected that particles can rotate signifi-cantly even though they will be translationally trapped andrattle inside small cages, until of course the actual jammingpoint is reached, at which point rotational jamming will alsocome into play. It is therefore not surprising that near thesphere point, the parameters inside the packing-generationprotocol, such as the moment of inertia of the particles andthe expansion rate of the particles, can significantly affect thefinal results. In particular, using fast particle expansion or toolarge of a moment of inertia leads to packings that are clearlynot rotationally jammed, since the torques are not balanced,however, they are translationally jammed and have balancedcentroid forces. We do not have a full understanding of thedynamics of our packing-generation algorithm, even near thejamming point.
In this paper we will focus on packings that are also ro-tationally jammed. In general one may need to distinguish
between translational and rotational jamming. For example,the ellipsoid packing produced by simply stretching the crys-tal packing of spheres along a certain axis by a scaling factorof � is translationally but not rotationally �strictly �11��jammed. This is because by changing the axis along whichthe stretch is performed one gets a whole family of ellipsoidpackings with exactly the same density. Therefore, it is pos-sible to shear the packing by changing the lattice vectorsused in the periodic boundary conditions, without changingthe density, as illustrated in Fig. 14 in two dimensions.
Isostatic packings are translationally ordered. As we al-ready demonstrated, in order for a hypoconstrained packingof ellipsoids to be jammed, the packing geometry must bedegenerate. The existence of a self-stress f requires that theorientations of particles be chosen so that the torques arebalanced in addition to the forces on the centroids. This leadsto a loss of “randomness” in a certain sense, since the num-ber of jammed configurations is reduced greatly by the factthat geometrically “special” �not generic� configurations areneeded to balance the torques.
However, it is also important to point out that disorderedisoconstrained packings of nearly spherical ellipsoids arehard to construct. In particular, achieving isocounting nearthe sphere point requires translational ordering. In two di-mensions, the average number of contacts per particle
needed is Z=6, however, the maximal kissing number nearthe sphere point is also Zmax=6. Therefore the only possibil-ity is that every particle have exactly Z=6 contacts. Thisinevitably leads to translational ordering on a triangular lat-tice. In other words, the only isoconstrained packing of el-lipses in the limit �→1 is the hard disk triangular crystal.
Similarly, in three dimensions, Z=Zmax=12 for nonsphe-roids, and therefore every particle must have exactly Z=12neighbors. While it not rigorously known what are the spherepackings with all particles having twelve neighbors, it islikely that only stacking variants of the fcc/hcp latticeachieve that property. For spheroids, the isoconstrained num-
ber of contacts is Z=10 and the results in Fig. 1 indicate thatthis value is nearly reached for sufficiently large aspect ra-tios. For nonspheroids, however, we only observe a maxi-mum of 11.4 contacts per particle, consistent with the factthat achieving the isoconstrained value requires more trans-lational ordering.
B. Two near spheres (nearly) touching
In what follows we will need first-order approximationsof the impenetrability constraints between two nearly spheri-cal ellipsoids. Assume there are two spheres A and B ofradius OA/B touching. Transform the spheres into ellipsoidswith semiaxes OI+�O, and orientation described by the ro-tation matrix Q, and denote �O=O−1�O. Finally, define thematrix
T = QT�OQ ,
which in the case of turning a disk into an ellipse with semi-axes O and O�1−��, i.e., aspect ratio �=1+�, ��1, be-comes
FIG. 13. �Color online� An example of a pre-stress stable sys-tem. Two elastic springs of stiffness k and length l are connected viaa joint that can move in the horizontal direction under the influenceof an external force F.
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-26

T = − �� sin2 � − sin � cos �
− sin � cos � cos2 �� = − �T�,
where � is the angle of orientation of the ellipse. It can beshown that to first order in � the new distance between theellipsoids is
� = 2uABT SuAB,
where
S =OA
OA + OBTA +
OB
OA + OBTB.
The torque exerted by the contact force f= fn on a givenparticle, to first order in asphericity �, comes about becausethe normal vector no longer passes through the centroid ofthe particle �as it does for spheres�. One can ignore the smallchanges in the magnitude of the normal force or the changein the contact point rC, and only consider the change in thenormal vector
n � Xu � �I − 2T�u = u − 2Tu ,
giving a torque
� = rC � f � 2of�Tu� � u .
C. Maintaining jamming near the sphere point
Assume now that we have a collectively jammed isocon-strained sphere packing with density �J
S and that we want tomake the disks slightly ellipsoidal by shrinking them along agiven set of axes, while still preserving jamming. Keepingorientations fixed, one can expand each near sphere by ascaling factor �� and displace each centroid by �r, so thatall particles that were initially in contact are still in contact.Note that because the matrix S is proportional to �, so will�� and �R. In other words, the change in the density will belinear in asphericity. However, the value of the slope dependson the choice of orientations of the ellipsoids. Referring backto Sec. V D 2 we see that to first order in �, �� is
�� =1
MfT� =
1
M��i,j
f ijuijTSijuij =
1
2M�
i�
j�N�i�f ijuij
TTiuij ,
giving a new jamming density
�J/�JS = �1 + ���d�
k=1
d
�1 + �iO� � 1 + d�� + eT�O.
Keeping all ellipsoids aligned produces an affine deforma-tion of the sphere packing that has the same jamming den-sity, but is not �first-order� jammed. Therefore, the true jam-ming density must be higher �J�J
S. This explains why thejamming density increases with aspect ratio near the spherepoint. The added rotational degrees of freedom allow one toincrease the density beyond that of the aligned �nematic�packing, which for ellipsoids has exactly the same density asthe sphere point.
Can we find a set of orientations for the ellipsoids so thatthe resulting packing is jammed? The first condition for jam-ming is that there exist a self-stress that balances both forcesand torques on each particle. Just from the force-balancecondition, one can already determine the interparticle forcesf. These will change little as one makes the particles slightlyaspherical, because the normal vectors barely change. There-fore, the self-stress is already known a priori, without regardto the choice of particle orientations. The orientations mustbe chosen so that the torques are also balanced. As shownabove, to first order in asphericity �, the torque balance con-dition for particle i is
�j�N�i�
f ij�Tiuij� � uij = �j
f ijUijTiuij = 0. �33�
This gives for each particle a set of possible orientations,given the contact network of the isoconstrained sphere pack-ing. The torque balance condition �33� is in fact the first-order optimality condition for maximizing the jamming den-sity, as expected. It is worth pointing out that for a randomassignment of orientations to ellipses the expected change indensity is identically zero; in order to get an increase in thedensity one must use orientations correlated with the trans-lational degrees of freedom.
Ellipses. In two dimensions, for a particular contact withu= �cos � , sin �� we have the simple expressions
uT�u = sin2�� − �� ,
u � �T�u� =1
2sin�2�� − ��� .
Considering 2� as the variable, one easily finds the solutionto Eq. �33�
2� = arctan�±�i
f i sin 2�i, ± �i
f i cos 2�i� . �34�
If we calculate the second derivative for the density increasewe find that
d2
d�2��i
f i sin2�� − �i�� = ± 1,
and therefore in order to maximize the jamming density weneed to choose the minus signs in Eq. �34�. Once we find theunique orientation of each ellipse that ensures torque bal-ance, we can calculate the jamming density
FIG. 14. The triangular packing of ellipses is not rotationallyjammed since one can shear the packing continuously without in-troducing overlap or changing the density. The figure shows a se-quence of snapshots as this shearing motion proceeds. The packingis, however, �strictly �11�� translationally jammed.
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-27

�J/�JS � 1 + s�� , �35�
where
s� = 2
�i
�j�N�i�
f ij�uijTTi
�uij�
�i
�j�N�i�
f ij
− 1.
We have calculated the slope s� for disordered binary diskpackings �with �J
S�0.84� numerically, and find a value s�
�0.454. We compare this theoretical value with numericalcalculations in Fig. 15. The first comparison is directly to thepacking fractions obtained using the Lubachevsky-Stillingeralgorithm, which do not have anything to do with perturbinga sphere packing. Although the simulation jamming densitiesare not linear over a wide range of aspect ratios, near �=1they are and the slope is close to the theoretically predicteds�. We also compare to results obtained by perturbing ajammed disk packing using MD. Specifically, we start with ajammed disk packing at a relatively high pressure �p=1000� and assign an orientation according to Eq. �34� toevery disk, and then we start growing the large semiaxesslowly while performing a form of constant pressure MD.The density changes automatically to keep the pressure con-stant, and from the instantaneous density we estimate thejamming density using Eq. �30�. In Fig. 15 we show how the�estimated� jamming density changes with aspect ratio. If wefreeze the orientations �i.e., use an infinite moment of iner-tia�, we obtain results that follow the theoretical slope pre-diction closely. Very good agreement with the results fromthe LS algorithm is obtained over a wide range of � if westart with the correct orientations and then allow the ellipseorientations to change dynamically. For comparison, in theinset we show that the packing density actually decreases ifwe use the LS algorithm and freeze orientations at their ini-tial �random� values, demonstrating that balancing thetorques and �maximally� increasing the density requires aparticular value for the particle orientations.
For ellipses, there are unique orientations that guaranteethe existence of self-stresses near a given isoconstrainedjammed disk packing. Do these orientations actually lead tojammed packings, that is, are the second-order conditions forjamming also satisfied? If one starts with a jammed diskpacking and transforms the disks into ellipses of aspect ratiosufficiently close to unity, the packing will remain transla-tionally jammed �13�. Subsequent increase in the size of theparticles must eventually lead to a packing of maximal den-sity. It is not however a priori obvious whether this packingis rotationally and translationally jammed or has some kindof peculiar unjamming motions that preserve the density,such as the ones shown in Fig. 14. For small disk packings,we have found the perturbed ellipse packings to be second-order jammed sufficiently close to the sphere point. Forlarger systems, even for very small asphericities, it is diffi-cult numerically to perturb a given disk packing into an el-lipse packing without leading to new contacts or breaking ofold ones, as discussed shortly. An analytical investigationmay be able to prove that the perturbed packings are actuallysecond-order jammed, and therefore prove that there exist
�large� jammed ellipse packings with Z=4, the absoluteminimum contact number possible for a jammed packing.
Finally, we note that in three dimensions the torque bal-ance equations �33� involve quaternions and are quartic, andit does not seem an analytical solution is possible as it is intwo dimensions. We however expect that the calculationsperformed here in d=2 can be generalized to higher dimen-sions as well. One interesting question to answer theoreti-cally in d=3 is whether the middle axes ��� affects the slopeof the density s� or whether only the ratio of the largest tothe smallest semiaxes ���, matters. In Ref. �4� we proposedthat the rapid increase in packing fraction could be attributedto the need to increase the contact numbers, since formingmore contacts requires a denser packing of the particles. Thisis supported by the observation that the maximal packingdensity is achieved for the most aspherical shape ��=1/2�.However, numerical results very close to the sphere point areconsistent with a slope s� independent of �. The argumentsof this section indicate that the density rise is independent ofthe rise of the coordination number, at least near the spherepoint.
D. Contact number near the sphere point
In our perturbation approach to ellipsoid packings nearthe sphere point, we assumed that the contact network re-mains that of the disk packing even as the aspect ratio movesaway from unity. However, as the aspect ratio increases andthe packing structure is perturbed more and more, some newcontacts between nearby particles will inevitably close, andsome of the old contacts may break. In Fig. 16 we show asystem that the linear perturbation prediction produces at �=1.025. While the original contacts in the jammed disk pack-ing are maintained relatively well, we see that many newoverlaps form that were not contacts in the disk packing.
1 1.01 1.02 1.03 1.04 1.05 1.06 1.07 1.08 1.09 1.1
Aspect ratio α
0.85
0.855
0.86
0.865
0.87
0.875
Est
imat
edφ J
MD algorithmFree orientationsFrozen orientationsTheory
1 1.2 1.4 1.60.84
0.85
0.86
0.87
0.88
0.89
0.9
Frozen random
FIG. 15. �Color online� The estimated jamming density near thedisk point for binary packings of hard ellipses, as obtained from theLS packing algorithm, from perturbing the disk packing usingconstant-pressure MD, and from the first-order perturbation theory.The inset shows some of the data over a larger range of aspect ratioand also shows the packing densities obtained when the ellipseshave infinite moment of inertia in the LS algorithm.
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-28

This means that the contact number will increase from Z=4 as asphericity is introduced.
These observations suggest a way to calculate the leading
order term of Z���−2d: We simply count the overlaps intro-duced by orienting and displacing the centroids of the ellip-soids according to the linear perturbation theory. It is well-known that jammed disordered sphere packings have anunusual multitude of nearly-touching particles, as manifestedby a power-law divergence in the pair correlation functionnear contact of the form g2�r���r−D�−0.4 �once rattlers areremoved� �2�. For binary disks in two dimensions the exactexponent has not been calculated, but it appears close to ahalf �51�. These near contacts will close to form true contacts
and cause the rapid increase in Z���, and we expect that thegrowth will be of the form
Z��� − 2d � Z��� − 1. �36�
A more rigorous analysis is difficult since we do not reallyhave an understanding of the geometry of the near contacts.We have numerically estimated the coefficient Z� and plottedthe prediction of Eq. �36� in Fig. 2. It is seen that the predic-tion matches the actual simulation results well sufficientlyclose to the sphere point.
X. CONCLUSIONS
In this paper we presented in detail the mathematicaltheory of jamming for packings of nonspherical particles andtried to understand the properties of jammed packings ofnonspherical particles of aspect ratio close to unity, focusingon hard ellipses and ellipsoids. In this section we summarizeour findings and also point to directions for future investiga-tion.
Mathematically, understanding jamming in hard-particlepackings is equivalent to understanding the behavior of largesystems of nonlinear inequalities as given by the impenetra-bility conditions. These inequalities can be written explicitlyby introducing a continuously differentiable overlap potentialwhose sign determines whether two particles overlap. In Sec.III we generalized the overlap potential proposed by Perramand Wertheim for hard ellipsoids to arbitrary smooth strictlyconvex particle shapes and determined its first order deriva-tives.
In Sec. IV, we discussed the conjecture that large disor-dered jammed packings of hard particles are isoconstrained,i.e., that they have an equal number of constraints and de-
grees of freedom, Z=2df. It is not possible to make thisconjecture into a theorem since the term “disordered” ishighly nontrivial to define �17�. However, arguments havebeen made in the literature in support of isocounting. Weshowed that this conjecture can be supported with reasonablearguments only for spheres, where particle rotations are not
considered. In particular, while it is expected that Z�2df for
“random” packings, the converse inequality Z2df only ap-plies to spheres. Packings of nonspherical particles can bejammed and have less than 2df contacts per particle, i.e., behypoconstrained. A minimally rigid ellipsoid packing, i.e., a
packing that has the minimal number of contacts needed forjamming, satisfied only the inequality Z2d, since at least2d contacts per particle are needed to block particle transla-tions. Particle rotations, however, and combined rotation/translation motions, can be blocked by the curvature of theparticle surfaces at the point of contact. In essence, if theradii of curvatures at the point of contact are sufficientlylarge, i.e., the particle contact is sufficiently “flat,” rotation ofthe particles is blocked. This can be visualized by consider-ing the limit of infinite radii of curvatures, when have acontact between two flat surfaces. Such contacts, in a certainsense, count as several “contact points” and block severaldegrees of freedom.
In Sec. V, we generalized the mathematics of first andsecond-order rigidity for tensegrity frameworks developed inRef. �12� to packings of nonspherical particles. We provedthat in order for a packing to be jammed there must exist aset of �nonzero� non-negative interparticle forces that are inequilibrium, i.e., the packing must have a self-stress. Further-more, we considered second-order terms for hypoconstrainedpackings that do have a self-stress but also have floppymodes, that is, particle motions that preserve interparticledistances to first order. The second-order analysis showedthat jammed packings of strictly convex particles cannothave less than 2d contacts per particle. We found that floppymodes involving particle rotations can be blocked �rigidified�by the stressmatrix, which includes second-order informationabout the particle surfaces at the point of contact. We pro-posed that this is exactly the type of jamming found in dis-ordered ellipsoid packings near the sphere point, and in Sec.VI we presented a numerical algorithm for testing hypocon-strained ellipsoid packings for jamming and applied it tosome computer-generated samples. We demonstrated that thepackings are indeed jammed even very close to the sphere
FIG. 16. Overlaps introduced at �=1.025 by the naive linearperturbation theory, which only takes into account the original con-tact network of the disk packing �black lines�. We see many over-laps forming between particles that were nearly touching when �=1.
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-29

point, where they have close to 2d contacts per particle.In Sec. VII we considered the thermodynamics of pack-
ings that are close to, but not exactly at, the jamming point,so that particles have some room to rattle �free volume�. Wefound that for hypoconstrained packings the jamming basinJ�Q, which is localized around the jamming point in con-figuration space, is very elongated along the space of floppymodes. For isostatic or hyperstatic packings, as jammedsphere packings always are, the jamming basin approaches apolytope in the jamming limit, whereas for hypoconstrainedpackings it approaches a �hyper� banana. The latter leads tovery large oscillations of the instantaneous pressure near thejamming point and a violation of the asymptotic free-volumeequation of state �pressure scaling�.
Real packings are always made from deformable �albeitvery stiff� particles, i.e., particles that interact via some elas-tic interaction potential. The analog of a jammed hard-particle packing for deformable particles are strict energyminima �inherent structures�, i.e., structures where any mo-tion of the particles costs energy �quadratic in the displace-ments�. In Sec. VIII we analyzed the first- and second-orderconditions for a strict energy minimum for twice-differentiable interaction potentials. We found that the first-order condition is exactly the requirement for the existenceof a selfstress, and that the second-order condition is exactlythe condition that the stress-matrix blocks the floppy modes.This deep analogy between jamming in hard-particle pack-ings and energy minima in soft-particle packings is not un-expected since a “soft” potential can approximate the singu-lar hard-particle potential arbitrarily closely. As the potentialbecomes stiffer, the energy minimum will become highlyanharmonic and its shape will closely resemble that of thejamming basin J�Q �even at very small temperatures�.
Finally, in Sec. IX we developed a first-order perturbationtheory for packings of nearly spherical ellipsoids, expandingaround the sphere point. The theory is based on the idea thatpackings of ellipsoids with aspect ratio �=1+� near unityhave the same contact network as a nearby isostatic packingof hard spheres. In order for the ellipsoid packing to also bejammed, the orientations of the ellipsoids must be chosen soas to balance the torques on each particle. These orientationsalso maximize the jamming density, increasing it beyond thatof the disk packing, and we analytically calculated the linearslope of the density increase with � for binary ellipse pack-ings. The calculated coefficient is in good agreement withnumerical results. The perturbation of the sphere packingalso leads to a rapid increase in the average particle coordi-
nation Z, which we attributed to the closing of the multitudeof near contacts present in disordered disk packings. The
predicted Z��� is also in good agreement with numericalobservations.
The observed peculiar behavior of packings of nonspheri-cal particles near the sphere point is a consequence of thebreaking of rotational symmetry. Near the sphere point thecoupling between particle positions and orientations is weakand translations dominate the behavior of the system. In thissense sphere packings are a good model system, and particleshapes close to spherical can be treated as a continuous per-turbation of sphere packings. However, even for aspect ratios
relatively close to unity, the perturbation changes the prop-erties of the system such as density and contact number in asharp fashion, making sphere packings a quantitatively unre-liable reference point for packings of more realistic particleshapes. Furthermore, even qualitative understanding of jam-ming and mechanical rigidity for packings of nonsphericalparticles requires consideration of phenomena that simply donot have a sphere equivalent.
Future work should consider the mathematics of jammingfor packings of hard particles that are convex, but not nec-essarily smooth or strictly convex. In particular, particleswith sharp corners and/or flat edges are of interest, such as,for example, tetrahedra �52�, cylinders and cubes. We alsobelieve that understanding jamming in frictional hard-particle packings, even for the case of spheres, requires amore thorough mathematical foundation. It is also importantto consider packings of soft ellipsoids and in particular de-velop algorithms to generate them computationally and tostudy their mechanical properties and vibrational spectra. In-vestigations of the thermodynamics of very dense ellipsoidsystems also demand further attention.
ACKNOWLEDGMENTS
A.D. and S.T. were supported in part by the National Sci-ence Foundation under Grant No. DMS-0312067. R.C. wassupported in part by the National Science Foundation underGrant No. DMS-0510625. We thank Paul Chaikin for manyinspiring discussions of ellipsoid packings.
APPENDIX: THE RECTANGULAR LATTICEOF ELLIPSES
In this appendix we consider a simple example of a
jammed hypoconstrained packing of ellipses having Z=4,the minimum necessary for jamming even for disks. Namely,the rectangular lattice of ellipses, i.e., the stretched version ofthe square lattice of disks, is collectively jammed, and inparticular, it is second-order jammed. More specifically,freezing all but a finite subset of the particles, the remainingpacking is second-order jammed. An illustration is providedin Fig. 17. At first glance, it appears that one can rotate anyof the ellipses arbitrarily without introducing overlap. How-ever, this is only true up to first order, and at the second-order level the “flat” contacts between the ellipses, that is,the contacts whose normals are along the small ellipse semi-axes, block this rotation through the curvature of the par-ticles at the point of contact.
The set of first-order flexes, i.e., particle motions whichpreserve contact distances to first order, can easily be con-structed in this example due to the simple geometry. Namely,a basis vector for this set is a single ellipse rotating aroundits centroid, giving the total number of first-order flexes Nf=N �25�. The basis formed by these first-order flexes is notorthogonal. However, its advantage is that it is easier to cal-culate the stress matrix, or more specifically, the matrix HV;we only need to consider ellipsoid rotations without consid-ering translations. The same observation applies wheneverone takes a jammed sphere packing and makes the particles
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-30

nonspherical but does not change the normal vectors at thepoint of contact. This can be done, for example, by simplytaking a jammed sphere packing and swelling the particles tobe nonspherical, without changing the geometry or connec-tivity of the contact network. If the particles swell enough tomake all of the contacts sufficiently flat, the new packingwill be jammed, since all of the first-order flexes consist ofparticle rotations only and are blocked by the flat curvatureof the contacts.
The fact that “flat” �the contacts among vertical neighborsin Fig. 17� contacts block rotations can easily be seen ana-lytically by considering the case of one ellipse jammedamong four fixed ellipses �two horizontally, two vertically�.Specifically, any self-stress for which the contact force in the“flat” contacts is larger than the force in the “curved” con-tacts, f flat� fcurv, makes the mobile ellipse jammed, morespecifically, prestress rigid �25�. The same result can beshown to apply to the square lattice of ellipses for an arbi-trary number of ellipses. If the ellipses are not hard but ratherdeformable, the packing would not support a compressionalong the curved contacts, but it would along the flat con-tacts. This is a very intuitive result: If one takes a smoothellipsoid and presses it against a table with its most curvedtip, it will buckle and the only stable configuration is onewhere the flat tip presses against the table. Note, however,
that the hard-ellipse equivalent is jammed and can resist anyfinite external forces, including a compression along thecurved contacts. The anharmonicity of the hard-sphere po-tential becomes essential in this example, since the packingcan choose the correct internal �self-� stresses �forces�needed to provide mechanical rigidity. In �realistic� systemsof deformable particles, the internal stresses are fixed anddetermined by the state of compression.
�1� H. A. Makse, J. Brujic, and S. F. Edwards, The Physics ofGranular Media �Wiley, New York, 2004�, Chap. StatisticalMechanics of Jammed Matter, pp. 45-86.
�2� A. Donev, S. Torquato, and F. H. Stillinger, Phys. Rev. E 71,011105 �2005�.
�3� C. S. O’Hern, L. E. Silbert, A. J. Liu, and S. R. Nagel, Phys.Rev. E 68, 011306 �2003�.
�4� A. Donev, I. Cisse, D. Sachs, E. A. Variano, F. H. Stillinger, R.Connelly, S. Torquato, and P. M. Chaikin, Science 303, 990�2004�.
�5� S. R. Williams and A. P. Philipse, Phys. Rev. E 67, 051301�2003�.
�6� C. F. Moukarzel, Phys. Rev. Lett. 81, 1634 �1998�.�7� A. V. Tkachenko and T. A. Witten, Phys. Rev. E 60, 687
�1999�.�8� J. N. Roux, Phys. Rev. E 61, 6802 �2000�.�9� S. F. Edwards, Physica A 249, 226 �1998�.
�10� S. Alexander, Phys. Rep. 296, 65 �1998�.�11� A. Donev, S. Torquato, F. H. Stillinger, and R. Connelly, J.
Comput. Phys. 197, 139 �2004�.�12� R. Connelly and W. Whiteley, SIAM J. Discrete Math. 9, 453
�1996�.�13� R. Connelly, Invent. Math. 66, 11 �1982�.�14� B. D. Lubachevsky and F. H. Stillinger, J. Stat. Phys. 60, 561
�1990�.�15� A. Donev, S. Torquato, and F. H. Stillinger, J. Comput. Phys.
202, 737 �2005�.�16� For spheres, such jammed disordered packings have tradition-
ally been referred to as random close packing �RCP�.�17� S. Torquato, T. M. Truskett, and P. G. Debenedetti, Phys. Rev.
Lett. 84, 2064 �2000�.
�18� A. Donev, F. H. Stillinger, P. M. Chaikin, and S. Torquato,Phys. Rev. Lett. 92, 255506 �2004�.
�19� W. Man, A. Donev, F. H. Stillinger, M. T. Sullivan, W. B.Russel, D. Heeger, S. Inati, S. Torquato, and P. M. Chaikin,Phys. Rev. Lett. 94, 198001 �2005�.
�20� K. Bagi, Granular Matter 9, 109 �2006�.�21� E. R. Nowak, J. B. Knight, E. Ben-Naim, H. M. Jaeger, and S.
R. Nagel, Phys. Rev. E 57, 1971 �1998�.�22� J. B. Knight, C. G. Fandrich, C. N. Lau, H. M. Jaeger, and S.
R. Nagel, Phys. Rev. E 51, 3957 �1995�.�23� F. H. Stillinger and T. A. Weber, J. Chem. Phys. 83, 4767
�1985�.�24� This threshold is larger than the radius of the �original� hard
disks and dependent upon the exact geometry of the packing.�25� A. Donev, Ph.D. thesis, Princeton University, Princeton, NJ,
2006�26� J. W. Perram and M. S. Wertheim, J. Comput. Phys. 58, 409
�1985�.�27� M. R. Kuhn and C. S. Chang, Int. J. Solids Struct. 43, 6026
�2007�.�28� C. S. O’Hern, S. A. Langer, A. J. Liu, and S. R. Nagel, Phys.
Rev. Lett. 86, 111 �2001�.�29� T. M. Truskett, S. Torquato, and P. G. Debenedetti, Phys. Rev.
E 62, 993 �2000�.�30� The mathematically formal meaning of the term “generic” is
used in rigidity theory for configurations of points �31�. How-ever, that rigorous meaning of the term almost never applies topackings of monodispersed particles. We use the term “ge-neric” merely to mean “not special,” i.e., typical.
�31� Rigidity Theory and Applications, edited by M. F. Thorpe andP. M. Duxbury, Fundamental Materials Research �Kluwer/
FIG. 17. The rectangular lattice of ellipses �i.e., affinelystretched square lattice of hard disks� with “hard-wall” boundaryconditions created by freezing the ellipses on the boundary. Thispacking is jammed, since the curvature of the flat contacts blocksthe rotations �including collective ones� of the ellipses.
UNDERCONSTRAINED JAMMED PACKINGS OF… PHYSICAL REVIEW E 75, 051304 �2007�
051304-31

Plenum, Dordrecht, 1999�.�32� S. Torquato and F. H. Stillinger, J. Phys. Chem. B 105, 11849
�2001�; S. Torquato, A. Donev, and F. H. Stillinger, Int. J.Solids Struct. 40, 7143 �2003�.
�33� C. H. Norris and J. B. Wilbur, Elementary Structural Analysis�McGraw-Hill, New York, 1960�.
�34� A hyperconstrained packing is statically underdetermined,since there are multiple ways to resolve almost any appliedload. In this case constitutive �elastic� laws need to be invokedto determine the forces. A hypoconstrained packing, on theother hand, is statically overdetermined, and as such is consid-ered unstable in the classical literature on mechanical struc-tures �33�.
�35� C. F. Moukarzel, Granular Matter 3, 41 �2001�.�36� Specifically, a packing of stiff particles will have only as many
contacts closed as there are degrees of freedom, M �Nf. Theadditional single degree of freedom due to the density � doesnot count unless the packing is compressed to close the addi-tional one contact that is discussed in Sec. IV A 2. Closingmore than M =Nf +1 contacts will require further compressionand significantly larger deformation of the particles.
�37� P. M. Chaikin, A. Donev, W. Man, F. H. Stillinger, and S.Torquato, Ind. Eng. Chem. Res. 45, 6960 �2006�.
�38� Note that in our notation a self-stress has dimensions of force,rather than force per unit area as in the engineering literature.
�39� M. Todd, Acta Numerica 10, 515 �2001�.�40� R. Connelly, Struct. Topology 14, 43 �1988�.�41� M. Wyart, Ann. Phys. �Paris� 30, 1 �2005�.�42� C. Gotsman and S. Toledo, SIAM J. Matrix Anal. Appl. �to be
published�.�43� S. M. Rump, Numer. Math. 43, 001 �2003�.�44� Z. W. Salsburg and W. W. Wood, J. Chem. Phys. 37, 798
�1962�.�45� A. Donev, F. H. Stillinger, and S. Torquato, J. Comput. Phys.
�to be published�.�46� F. H. Stillinger and Z. W. Salsburg, J. Stat. Phys. 1, 179
�1969�.�47� A. Donev, S. Torquato, F. H. Stillinger, and R. Connelly, Phys.
Rev. E 70, 043301 �2004�.�48� H. Lütkepohl, Handbook of Matrices �Wiley, New York,
1997�.�49� L. E. Silbert, A. J. Liu, and S. R. Nagel, Phys. Rev. Lett. 95,
098301 �2005�.�50� M. Wyart, L. E. Stilbert, S. R. Nagel, and T. A. Witten, Phys.
Rev. E 72, 051306 �2006�.�51� There is some ambiguity in defining the pair-correlation func-
tion for bi-dispersed packings, leading to ambiguity in the ex-ponent.
�52� J. H. Conway and S. Torquato, Proc. Natl. Acad. Sci. U.S.A.103, 10612 �2006�.
DONEV et al. PHYSICAL REVIEW E 75, 051304 �2007�
051304-32





![A Linear Programming Algorithm to Test for Jamming in …Donev/Packing/Jamming_LP.JCP.pdfpackings into locally, collectively and strictly jammed packings proposed in Ref. [24]. In](https://img.pdfslide.net/doc/110x75/5ec020f6f2b00e3c677a0cf5/a-linear-programming-algorithm-to-test-for-jamming-in-donevpackingjamminglpjcppdf.jpg)