Embed Size (px)
Citation preview

Institute of Communications Engineering, EE, NCTU 1
Unit 2 Best Linear UnbiasedEstimator (BLUE)

Institute of Communications Engineering, EE, NCTU 2
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
The constraints or limitations on finding the MVU Do not know the PDF Or not willing to a assume a model for the PDF Not able to produce the MVU estimator even if the PDF is
given Faced with our inability to determine the optimal MVU
estimator, it is reasonable to resort to a suboptimal one An estimator which is linear in the data The linear estimator is unbiased as well and has minimum
variance The estimator is termed the best linear unbiased estimator Can be determined with the first and second moments of the
PDF, thus complete knowledge of the PDF is not necessary
Institute of Communications Engineering, EE, NCTU 3
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
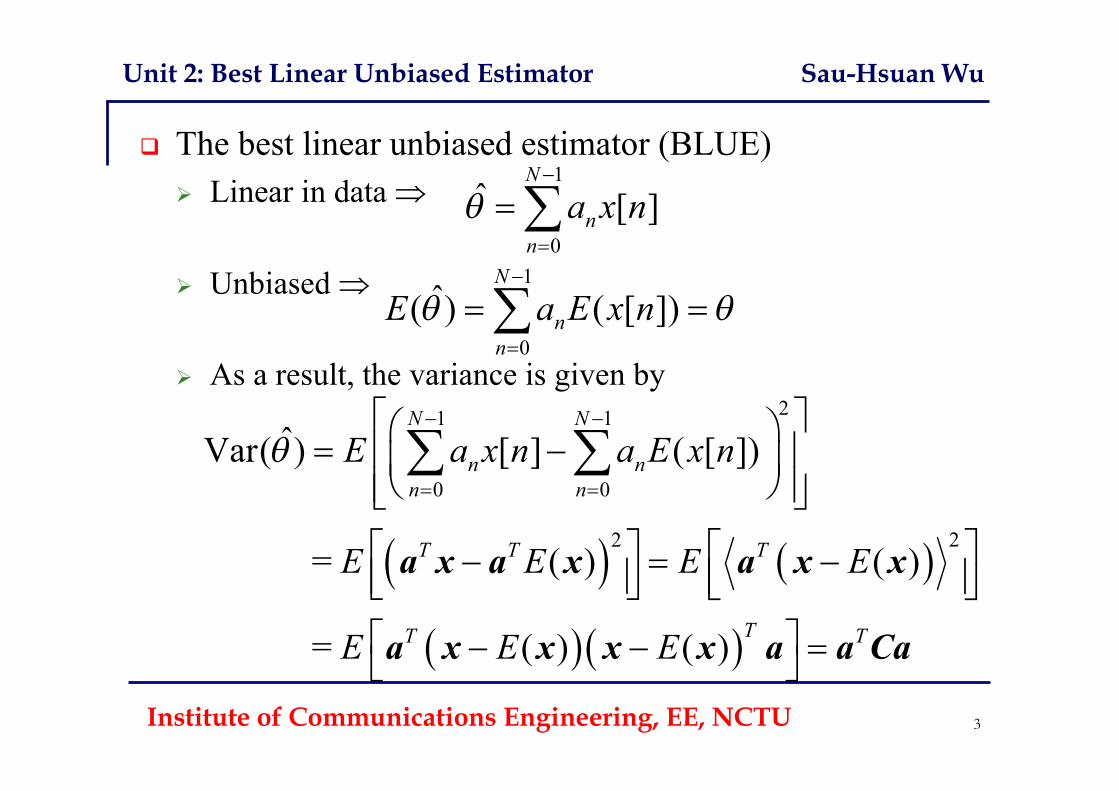
The best linear unbiased estimator (BLUE) Linear in data
Unbiased
As a result, the variance is given by
1
0
ˆ [ ]N
nn
a x n
1
0
ˆ( ) ( [ ])N
nn
E a E x n
21 1
0 0
22
ˆVar( ) [ ] ( [ ])
= ( ) ( )
= ( ) ( )
N N
n nn n
T T T
TT T
E a x n a E x n
E E E E
E E E
a x a x a x x
a x x x x a a Ca

Institute of Communications Engineering, EE, NCTU 4
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
To satisfy the unbiased constraint, E(x[n]) must be linearin , namely
E(x[n]) = s[n] where s[n]’s are known
Rewrite x[n] asx[n]= E(x[n]) + [x[n]- E(x[n])]= s[n] +w[n]
This means that the BLUE is applicable to amplitudeestimation of known signals in noise
Let s=[s[0], s[1],…,s[N-1]]T. Based on the aboveassumption, we reformulate the BLUE as
ˆ arg min subject to 1T T a
a Ca a s
Institute of Communications Engineering, EE, NCTU 5
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
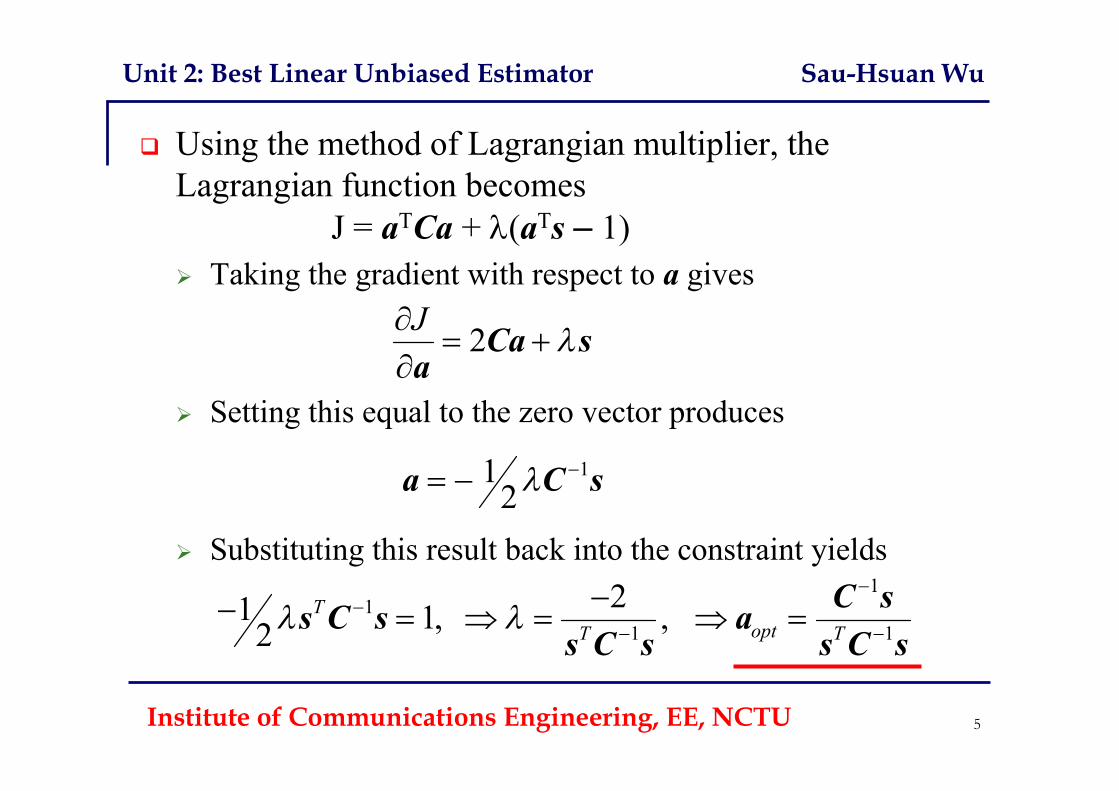
Using the method of Lagrangian multiplier, theLagrangian function becomes
J = aTCa + (aTs –1) Taking the gradient with respect to a gives
Setting this equal to the zero vector produces
Substituting this result back into the constraint yields
2J
Ca s
a
112
a C s
11
1 1
21 1, ,2T
optT T
C s
s C s as C s s C s

Institute of Communications Engineering, EE, NCTU 6
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
The corresponding variance is given by
The resultant estimator is
since E(x) = s To determine the BLUE, we only require knowledge of s or the scaled mean C, the covariancewhich are the first and second moments, but not the entire PDF
1 1
1 1 1
1TTopt opt T T T
s C C s
a Ca Cs C s s C s s C s
1
1ˆ
T
T
s C xs C s

Institute of Communications Engineering, EE, NCTU 7
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
Ex. x[n]= A + w[n], n=0,1,…,N-1 with var(w[n]) = n2
Since E(x[n]) = A s[n]=1 s = 1 Then
The min variance is
1
1ˆ
T
TA
1 C x1 C 1
1
20
1ˆvar( )1N
n n
A
2 10
2 21 0
1
2201
0 0 [ ]0 0 ˆwith A=
1
0 0
N
n nN
n nN
x n
C

Institute of Communications Engineering, EE, NCTU 8
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
Extension to a vector parameter If the parameters to be estimated are = [1,…,p]T
Then for the estimator to be linear
In matrix form, this is In order for to be unbiased
1
0
ˆ [ ], i=1,...,pN
i inn
a x n
1
ˆ , where [ ,..., ]Tp θ Ax A a a
θ̂
1 2
ˆ ( )
( ) p
E E
E
θ A x θ
x h h h θ Hθ
AH I

Institute of Communications Engineering, EE, NCTU 9
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
Similarly, we havex= E(x) + [x - E(x)]= H+w with w ~ N(0, C)
The optimization problem becomes
The Lagrangian function for each ai is given byJi = ai
TCai + (aiTH –ei
T) i with i = [1(i),…, p
(i)] Taking the gradient with respect to ai gives
Setting this equal to the zero vector produces
ˆ arg min trace subject toT A
θ ACA AH I
2ii i
i
J
Ca Hλ
a
112i i
a C Hλ
Institute of Communications Engineering, EE, NCTU 10
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
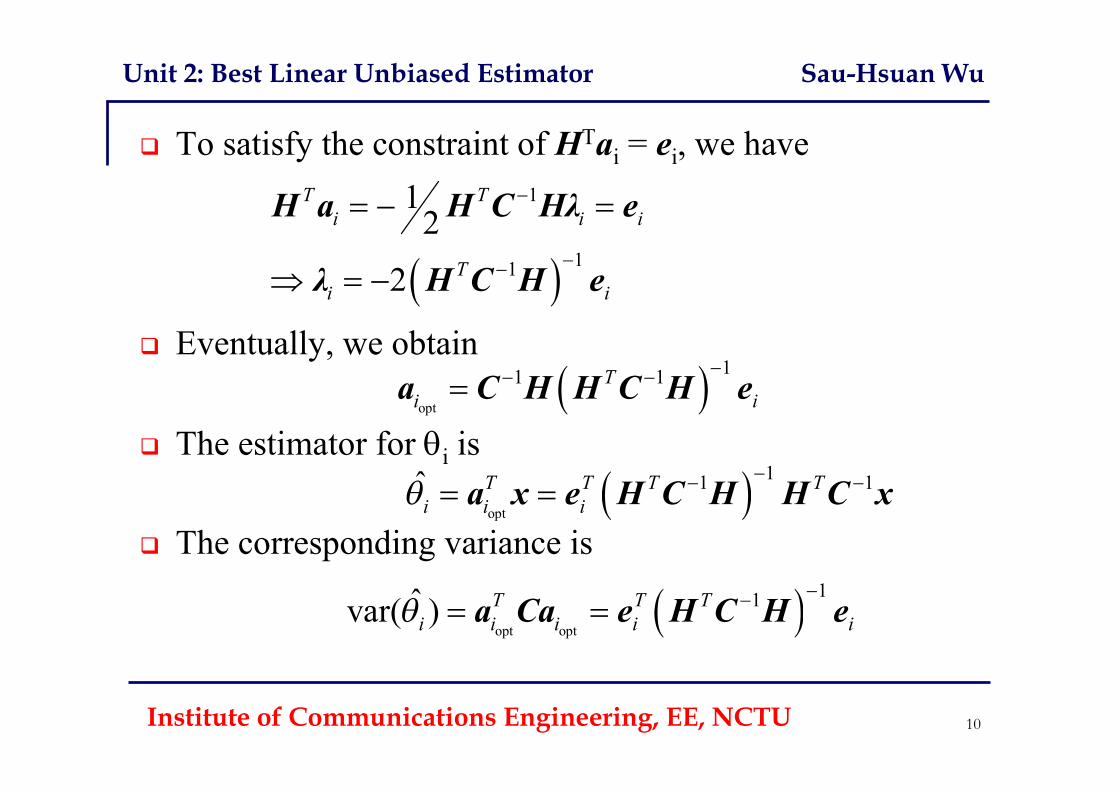
To satisfy the constraint of HTai = ei, we have
Eventually, we obtain
The estimator for i is
The corresponding variance is
1
11
12
2
T Ti i i
Ti i
H a H C Hλ e
λ H C H e
opt
11 1Ti i
a C H H C H e
opt opt
11ˆvar( ) T T Ti i i i i
a Ca e H C H e
opt
11 1ˆ T T T Ti i i
a x e H C H H C x

Institute of Communications Engineering, EE, NCTU 11
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
Now, if we put the estimators into a vector form
The corresponding covariance matrix is
where
Thus
Hence,
11 1ˆ T T θ H C H H C x
Institute of Communications Engineering, EE, NCTU 12
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
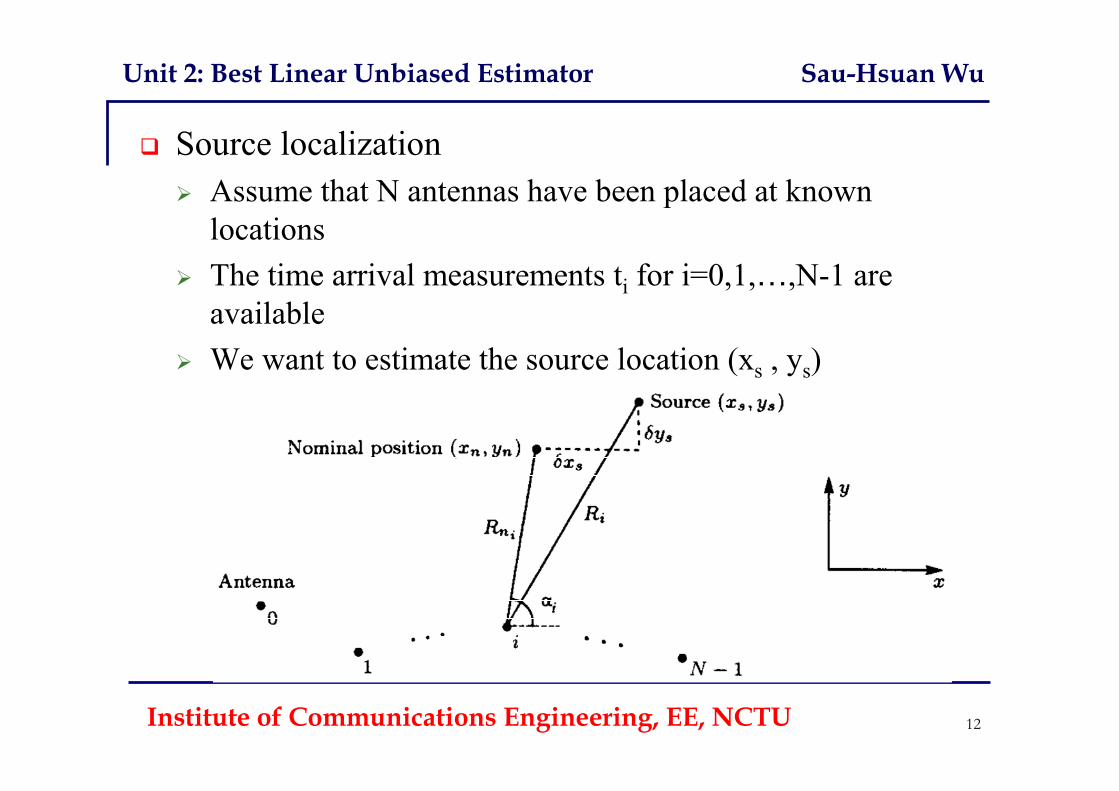
Source localization Assume that N antennas have been placed at known
locations The time arrival measurements ti for i=0,1,…,N-1 are
available We want to estimate the source location (xs , ys)

Institute of Communications Engineering, EE, NCTU 13
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
The measurements are modeled byti =T0 + Ri / c + i, i = 0,1,…,N-1
No assumptions are made about the PDF of i while we doknow its zero mean with variance 2
Let the position of the i-th antenna be (xi, yi)
Define = [xs , ys]T. ti is a function nonlinear in To apply the Gauss-Markov theorem, we assume a nominal
position (xn, yn) close to (xs , ys) is available We next update the position (xn+1, yn+1) to make it
approximate (xs , ys) sequentially. To this end, we require anestimate of
= [xs - xn, ys - yn]T = [xs , ys]T

Institute of Communications Engineering, EE, NCTU 14
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
Now use a first-order Taylor expansion of Ri (xs, ys) at(xn, yn)
and xs = xs-xn, ys = ys - yn
With this model we have
As defined in the figure
The model simplifies to
cos , sini i
n i n ii i
n n
x x y yR R
0cos sin
in i ii s s i
Rt T x y
c c c

Institute of Communications Engineering, EE, NCTU 15
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
Since is a known constant. Let i = ti -
In practice, knowledge of T0 would require accurate clocksynchronization between the source and the receiver
To avoid the synchronization requirement, it is customaryto consider time difference of arrivals (TDOA)
Generate the TDOAs asi = i - i-1, for i=1,2,…,N-1
0cos sini i
i s s iT x yc c
1 1 11 1
cos cos sin sini i i s i i s i ix yc c
Institute of Communications Engineering, EE, NCTU 16
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
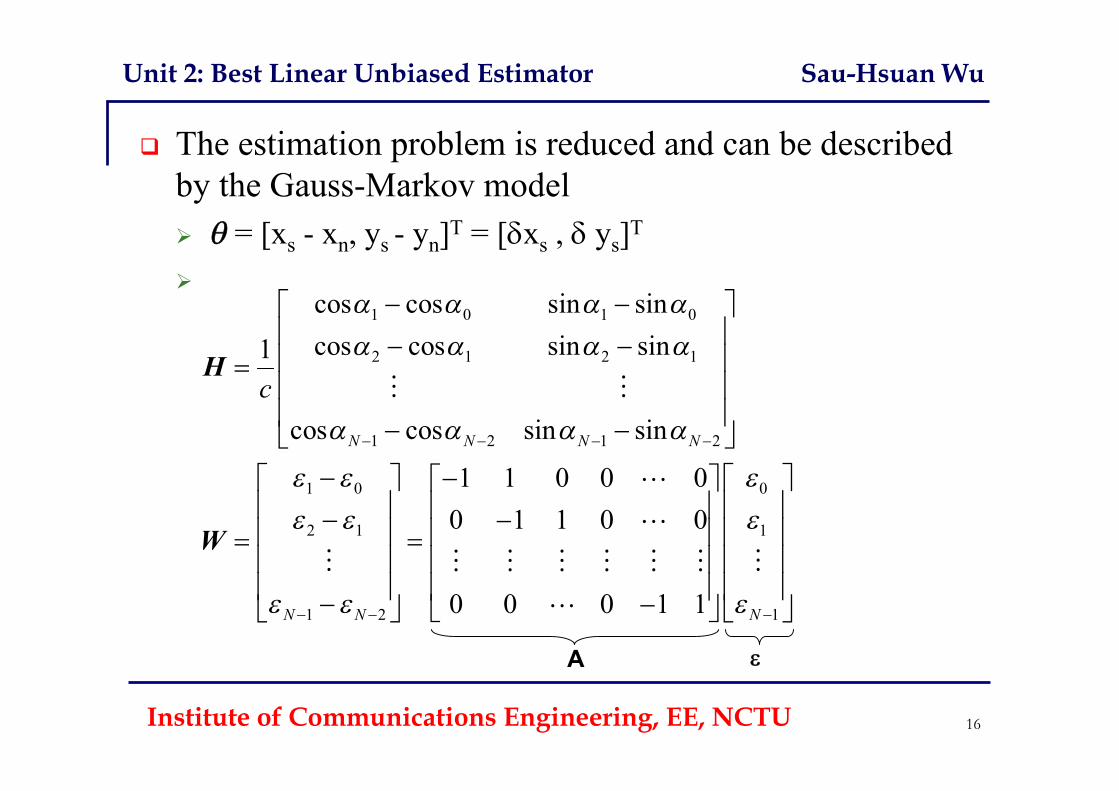
The estimation problem is reduced and can be describedby the Gauss-Markov model = [xs - xn, ys - yn]T = [xs , ys]T
1 0 1 0
2 1 2 1
1 2 1 2
1 0 0
2 1 1
1 2 1
cos cos sin sincos cos sin sin1
cos cos sin sin
1 1 0 0 00 1 1 0 0
0 0 0 1 1
N N N N
N N N
c
H
W
A
Institute of Communications Engineering, EE, NCTU 17
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
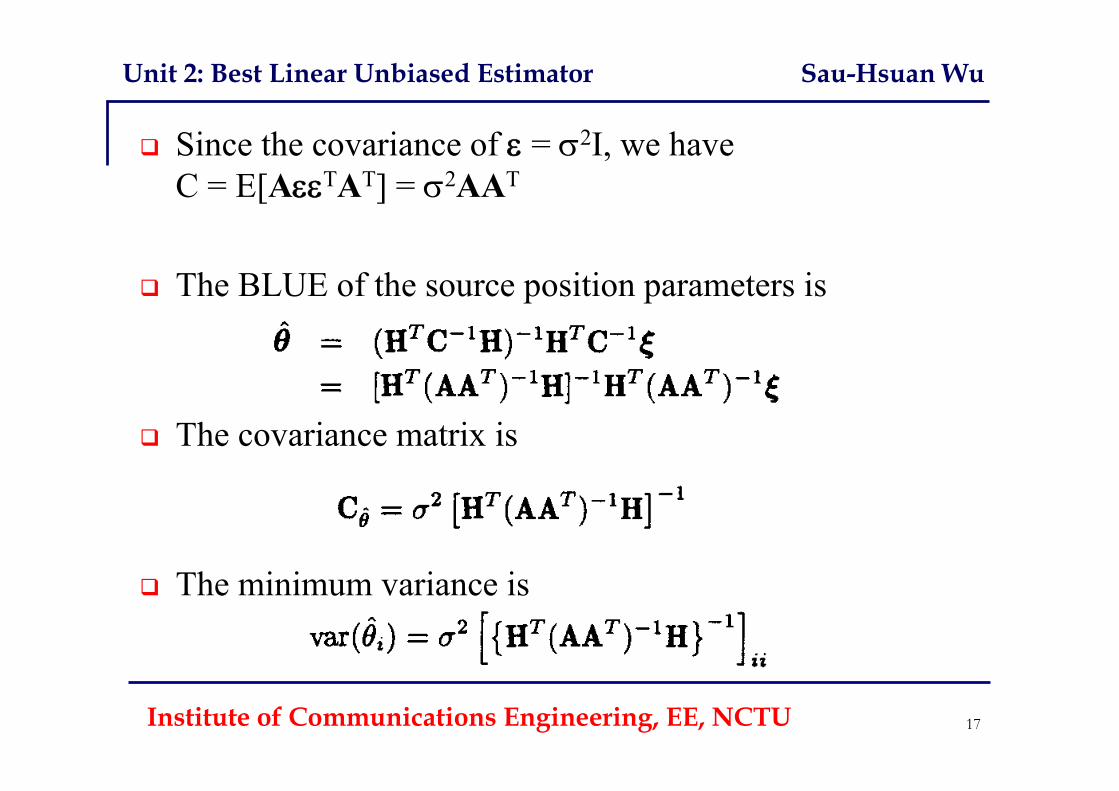
Since the covariance of = 2I, we haveC = E[ATAT] = 2AAT
The BLUE of the source position parameters is
The covariance matrix is
The minimum variance is

Institute of Communications Engineering, EE, NCTU 18
Unit 2: Best Linear Unbiased Estimator Sau-Hsuan Wu
Suppose we have a three antenna linear array Then
For the best localization, we would like to be small d between antenna can be make large





























