Embed Size (px)
Citation preview

UNIVERSIDAD NACIONAL DE INGENIERÍA FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
PLANIFICACIÓN DE INVERSIONES EN SUBTRANSMISIÓN ELÉCTRICA CONSIDERANDO RIESGOS E INCERTIDUMBRES
TESIS
PARA OPTAR EL GRADO ACADÉMICO DE MAESTRO EN CIENCIAS CON
MENCIÓN EN SISTEMAS DE POTENCIA
ELABORADO POR HÉCTOR RAÚL CHÁVEZ ARIAS
ASESOR Ms. Ing. DANIEL CÁMAC GUTIÉRREZ
LIMA – PERÚ
2014

DEDICATORIA
Dedico este proyecto a Dios por darme la vida y el conocimiento, a mis padres por su
gran amor y sacrificio en los momentos más duros, a mis hijos y hermano Jacob que son
la fuente de mi superación y a Flor por su gran apoyo y comprensión.
ii
INDICE
INTRODUCCIÓN ................................................................................................................. 1
CAPÍTULO I ......................................................................................................................... 3
PLANEAMIENTO DE LA EXPANSIÓN DE LA SUBTRANSMISIÓN .................................. 3
1.1 Alcances ................................................................................................................... 3
1.2 Aspectos regulatorios respecto la planificación de inversiones de la
subtransmisión en el sistema eléctrico peruano ...................................................... 5
1.3 Importancia del planeamiento de la expansión de los sistemas de subtransmisión 6
1.4 Motivación para el estudio de planeamiento de la subtransmisión .......................... 8
1.5 Objetivos de la investigación .................................................................................... 9
1.6 Justificación ............................................................................................................ 10
1.7 Estructura del Trabajo ............................................................................................ 10
CAPÍTULO II ...................................................................................................................... 12
PROBLEMA DEL PLANEAMIENTO DE LA EXPANSIÓN DE SISTEMAS DE
SUBTRANSMISIÓN ELÉCTRICA ..................................................................................... 12
2.1 Principales herramientas en la planificación de sistemas de subtransmisión ........ 13
2.2 Tratamiento del tiempo en el planeamiento ........................................................... 14
2.3 Tratamiento del criterio de confiabilidad “n-1” en el planeamiento ........................ 15
2.4 Tratamiento de las incertidumbres en el planeamiento ......................................... 16
2.5 Optimización en el planeamiento de la expansión ................................................. 17
2.6 Trabajos de planeamiento en el sistema de subtransmisión peruano ................... 18
2.7 Trabajos que han considerado el problema de planeamiento de la expansión ..... 19
2.8 Trabajos que han considerado el problema de planeamiento con variaciones
respecto al tradicional ............................................................................................ 21
CAPÍTULO III ..................................................................................................................... 22
MODELOS MATEMÁTICOS UTILIZADOS PARA REPRESENTAR EL PROBLEMA DE
PLANEAMIENTO Y TÉCNICAS DE SOLUCIÓN .............................................................. 22
3.1 Modelos matemáticos ............................................................................................ 23
3.1.1 Modelo de transportes ........................................................................................... 23
3.1.2 Modelo DC ............................................................................................................. 28
iii

3.1.3 Modelo híbrido no lineal ......................................................................................... 31
3.1.4 Modelo básico considerando generación ficticia .................................................... 33
3.1.5 Modelo lineal disyuntivo ......................................................................................... 36
3.1.6 Modelo AC ............................................................................................................. 37
3.2 Técnicas de solución .............................................................................................. 39
3.2.1 Algoritmos heurísticos constructivos ...................................................................... 39
3.2.2 Algoritmos de optimización clásica ........................................................................ 42
3.2.3 Algoritmos metaheuristicos .................................................................................... 44
3.3 Técnicas para el análisis de riesgos económicos y toma de decisiones ante
incertidumbres ........................................................................................................ 45
3.3.1 Técnica compromiso/riesgo (trade-off/risk) ............................................................ 45
3.3.2 Técnica de costo esperado .................................................................................... 51
3.3.3 Técnica de costo de oportunidad máximo ............................................................. 52
3.3.4 Técnica Hurvics ...................................................................................................... 52
CAPÍTULO IV .................................................................................................................... 54
METODOLOGÍA DE SOLUCIÓN ...................................................................................... 54
4.1 Metodología propuesta .......................................................................................... 56
4.2 Determinación de planes de expansión ................................................................. 58
4.2.1 Formulación del problema de expansión estático .................................................. 59
4.2.2 Formulación del problema de expansión estático con criterio “n-1” ....................... 60
4.2.3 Formulación del problema de expansión multietapa .............................................. 62
4.2.4 Formulación del problema de expansión multietapa con criterio n-1 ..................... 63
4.2.5 Formulación del problema de expansión multietapa considerando el criterio n-1 en
los enlaces radiales ................................................................................................ 65
4.3 Cálculo de la energía no suministrada (ENS) ........................................................ 66
4.3.1 Cálculo de la demanda no atendida debido a contingencias ................................. 66
4.3.2 Cálculo de la demanda no atendida debido a incertidumbres en la demanda ...... 68
4.4 Cálculo de pérdidas ............................................................................................... 68
4.5 Cálculo de las pérdidas económicas debido a inversiones ineficientes ................. 69
4.6 Descripción de software CBC, GLPK y OCTAVE .................................................. 71
CAPÍTULO V ..................................................................................................................... 72
APLICACIÓN DE MODELO DE OPTIMIZACIÓN ............................................................. 72
5.1 Sistema Garver ...................................................................................................... 72
5.1.1 Modelo estático ...................................................................................................... 73
5.1.2 Modelo estático considerando criterio “n-1” ........................................................... 74
5.1.3 Modelo dinámico .................................................................................................... 75
iv

5.1.4 Modelo dinámico considerando criterio “n-1” ......................................................... 76
5.1.5 Modelo dinámico considerando criterio “n-1” en enlaces radiales ......................... 77
5.2 Sistema IEEE 24 barras ......................................................................................... 78
5.3 Sistema subtransmisión de Luz del Sur ................................................................. 80
CAPÍTULO VI .................................................................................................................... 86
APLICACIÓN DE METODOLOGÍA PROPUESTA AL SISTEMA DE SUBTRANSMISION
DE LUZ DEL SUR ............................................................................................................. 86
6.1 Sistema de subtransmisión de Luz del Sur ............................................................ 86
6.2 Determinación de planes de expansión ................................................................. 90
6.3 Definición de escenarios ........................................................................................ 90
6.4 Análisis trade off ..................................................................................................... 91
6.5 Análisis risk ............................................................................................................ 92
6.6 Resultados ............................................................................................................. 94
CONCLUSIONES .............................................................................................................. 97
APORTES .......................................................................................................................... 99
RECOMENDACIONES .................................................................................................... 100
BIBLIOGRAFIA ................................................................................................................ 101
APÉNDICE A ................................................................................................................... 111
APÉNDICE B ................................................................................................................... 121
v

INDICE DE TABLAS Tabla 3.1 Ejemplo de técnica costo esperado ................................................................... 51
Tabla 3.2 Ejemplo de técnica costo oportunidad máximo ................................................. 52
Tabla 3.3 Ejemplo de técnica Hurvicz ............................................................................... 53
Tabla 3.4 Ejemplo de técnica Hurvicz, variación α ............................................................ 53
Tabla 5.1 Resultados del modelo estático ......................................................................... 74
Tabla 5.2 Resultados del modelo estático considerando el criterio n-1 ............................ 74
Tabla 5.3 Resultados del modelo dinámico ....................................................................... 75
Tabla 5.4 Resultados del modelo dinámico considerando el criterio n-1 .......................... 76
Tabla 5.5 Resultados del modelo dinámico ....................................................................... 77
Tabla 5.6 Resultados en Sistema IEEE 24 barras ............................................................ 79
Tabla 5.7 Resultados en Sistema Subtransmisión de Luz del Sur .................................... 83
Tabla 6-1 Atributos de planes de expansión con mejores atributos .................................. 92
Tabla 6.2 Análisis Risk ...................................................................................................... 93
Tabla 6.3 Análisis Risk (todos los escenarios) .................................................................. 93
Tabla 6.4 Análisis Risk ...................................................................................................... 94
vi

INDICE DE FIGURAS Figura 1.1 Planificación de la subtransmisión y su relación con las demás etapas de
planificación ........................................................................................................ 4
Figura 3.1 Representación del sistema de tres barras ...................................................... 26
Figura 3.2 Primera ley de Kirchhoff ................................................................................... 26
Figura 3.3 Segunda ley de Kirchhoff ................................................................................. 29
Figura 3.4 Análisis Trade-Off – Relación Tipo A ............................................................... 48
Figura 3.5 Análisis Trade-Off – Relación Tipo B ............................................................... 48
Figura 3.6 Análisis Trade-Off – Relación Tipo C ............................................................... 49
Figura 3.7 Análisis Trade-Off – Relación Tipo D ............................................................... 50
Figura 3.8 Evaluación de Atributos con el Método Trade-Off/Risk .................................... 50
Figura 4.1 Metodología Propuesta .................................................................................... 58
Figura 4.2 Determinación de planes de expansión ........................................................... 59
Figura 4.3 Determinación de ENS ..................................................................................... 66
Figura 4.4 Determinación de pérdidas ............................................................................... 69
Figura 4.5 Determinación de PEI ....................................................................................... 70
Figura 5.1 Sistema Garver: configuración inicial ............................................................... 73
Figura 5.2 Sistema IEEE 24 barras: configuración inicial .................................................. 78
Figura 5.3 Sistema Subtransmisión de Luz del Sur ........................................................... 82
Figura 6.1 Sistema Subtransmisión de Luz del Sur: Configuración Actual ...................... 88
Figura 6.2 Sistema Subtransmisión de Luz del Sur: Alternativa de Enlaces .................... 89
Figura 6.3 Atributos VPI vs ITE ......................................................................................... 91
Figura 6.4 Atributos VPI vs CTI ......................................................................................... 91
Figura 6.5 Atributos ITE vs CTI ......................................................................................... 92
Figura 6.6 Plan de expansión del sistema de subtransmisión de Luz del Sur ................. 96
vii
RESUMEN
El desarrollo de este proyecto comienza identificando la problemática de la
planificación de inversiones en los sistemas de subtransmisión, que con frecuencia
resultan ineficientes debido a que se requieren de continuos ajustes o inversiones
adicionales para corregir las desadaptaciones entre la capacidad de transporte y la
demanda, ocasionando tarifas eléctricas ineficientes y pérdidas al inversionista. Para
afrontar dicho problema se han estudiado las metodologías de planificación desarrollados
en el ámbito nacional, el estado del arte de los modelos de planeamiento de la expansión
y la literatura especializada disponible en éste campo.
La metodología que se propone en esta investigación considera técnicas de
optimización y de análisis de riesgos e incertidumbres. El método de optimización
desarrollado integra el modelo de transportes, la técnica Branch and Bound y un
algoritmo de flujo de potencia. Esta integración sistemática reemplaza al modelo ideal AC
y hace posible incluir los aspectos de planificación multietapa y confiabilidad en la
formulación del problema; asimismo, es la base para obtener los planes de expansión en
la subtransmisión. Los “planes” obtenidos se combinan con los “futuros” (realización de
incertidumbres) y se definen “escenarios”. Luego, para cada “escenario” se determinan
sus “atributos”, y utilizando la técnica del trade off/risk se determina un plan “flexible” y
con menores riesgos debido a las incertidumbres.
La propuesta esta implementada en VBA de Excel, utiliza los solver CBC ó GLPK
para resolver el problema de tipo lineal entero mixto y el GNU Octave para el algoritmo de
flujo de potencia. El modelo de optimización propuesto se valida en los sistemas Garver e
IEEE de 24 barras. Finalmente, la metodología es aplicada al sistema de subtransmisión
de Luz del Sur.
viii

ABSTRACT
The development of this project begins by identifying the issues of investment
planning subtransmission systems, which are often inefficient because it is require
continuous adjustments or additional investments to correct mismatches between
transport capacity and demand, causing investor losses and inefficient electricity rates. To
address this problem have been studied planning methodologies developed at the
national level, the state of the art models and expansion planning the literature available in
this field.
The methodology proposed in this research considers optimization techniques and
analysis of risks and uncertainties. The optimization method developed integrated
transport model, the Branch and Bound technique and power flow algorithm. This
systematic integration ideal model replaces the AC and can include aspects of multistage
reliability planning and problem formulation; also is the basis for expansion plans in the
subtransmission. The "plan" obtained are combined with the "future" (creating
uncertainties) and "scenarios" are defined. Then, for each "stage" is determined by its
"attributes" and using the technique of tradeoff / risk a "robust and flexible" plan is
determined.
The proposal is implemented in Excel VBA, or CBC uses GLPK solver to solve the
problem of mixed integer linear type and GNU Octave for power flow algorithm. The
proposed optimization model is validated on the IEEE Garver and 24 bar systems. Finally,
the methodology is applied to the subtransmission system of Luz del Sur.
ix
INTRODUCCIÓN
Uno de los elementos primordiales que conforman un sistema eléctrico de potencia
para el transporte de energía eléctrica lo constituyen los sistemas de subtransmisión¨ [87], considerados como un punto intermedio entre la transmisión y la distribución. Su
misión es enlazar los puntos de frontera del sistema de transmisión, a través de las
barras de interconexión en muy alta tensión; con los sistemas de distribución, a través de
las subestaciones de potencia.
En el pasado, la planificación de inversiones en la subtransmisión contemplaba
períodos de corto y mediano plazo, motivo por el cual los estudios de planeamiento de la
expansión de dichos sistemas eran resueltos utilizando métodos de evaluación directa de
alternativas, planteados en base a la experiencia del planificador y su conocimiento del
sistema. La disponibilidad de espacios para la construcción de futuras ampliaciones,
pocas restricciones por parte de los organismos gubernamentales y de regulación,
facilitaban aún más la tarea del planificador.
El crecimiento de la economía ha hecho que dichas variables sean cada vez más
rígidas, escasas en algunos casos, e inciertas debido a la dinámica del crecimiento en el
tiempo, ocasionando mayor dificultad en la planificación y la ejecución de inversiones
ineficientes en el corto, mediano y largo plazo. Otro aspecto negativo en la planeación de
dichos sistemas, es la aplicación de métodos tradicionales “deterministas”, cuya solución
consiste en evaluar directamente alternativa por alternativa hasta hallar la mejor de entre
todas las opciones, sin duda, con grandes esfuerzos computacionales y de tiempo en el
desarrollo de la planificación de la red. De aquí que la planificación de inversiones en
dichos sistemas resulta ser un problema de alta complejidad debido a la gran cantidad de
combinaciones posibles a ser analizadas, que en una manera sistematizada se centra
básicamente en resolver problemas de optimización matemática y técnicas para mitigar el
riesgo económico.
Para el caso peruano, el marco regulatorio vigente reconoce dos tipos de
clasificación para los sistemas de subtransmisión: según su antigüedad, se tiene a los
sistemas secundarios de transmisión (SST) y los sistemas complementarios de
transmisión (SCT) [46]; y según su ubicación, de demanda (SSTD y SCTD), de

generación (SSTG y SCTG), y los de generación/demanda (SSTGD y SCTGD) [56]. Los
más relevantes en tamaño y con mayores dificultades en la planificación corresponden a
los SSTD y SCTD. Para dichos sistemas, los organismos reguladores han elaborado
normas técnicas con mayores exigencias de calidad y confiabilidad en el planeamiento de
la expansión, y como consecuencia en la planificación de inversiones.
Este proyecto está orientado a resolver el problema del planeamiento de la
expansión de corto, mediano y largo plazo en los sistemas de subtransmisión tipo “SSTD
y SCTD”, considerando las variantes de planificación multietapa y de confiabilidad
(criterio n-1), así como la mitigación de los riesgos ocasionados por las incertidumbres del
sistema, con el objeto de determinar un plan de inversiones “flexible” en el corto y
mediano plazo.
2

CAPÍTULO I PLANEAMIENTO DE LA EXPANSIÓN DE LA SUBTRANSMISIÓN
1.1 Alcances
La planificación del transporte de la energía eléctrica consta de dos niveles o tipos:
(1) la planificación de la red de transmisión (SPT y SGT, para el caso peruano) y, (2) la
planificación de la subtransmisión (SST y SCT, para el caso peruano). Por lo general la
red de transmisión se planifica en conjunto con la generación y generalmente tienen tres
objetivos: servir a la carga, velar por la seguridad del sistema y asegurar la capacidad de
la red de transmisión, los dos últimos previstos desde la perspectiva de la generación
para proporcionar estabilidad al sistema frente a posibles perturbaciones en las plantas.
En este caso, la planificación de la transmisión no se refiere directamente a la entrega,
sino al nivel de generación y transmisión del sistema; por lo tanto, es una actividad que
se encuentra al margen de la planificación de la subtransmisión. Respecto a éste último,
también puede definirse como la planificación de la capacidad de transferencia a las
subestaciones de potencia (transformación a la distribución), referida directamente a la
entrega y relevante para la distribución.
Por lo tanto, el aspecto clave en la planificación del transporte de la energía eléctrica
es abarcar dos funciones bien definidas: la planificación de la "generación-transmisión“, la
cual se centra en el establecimiento de una red fuerte con la seguridad y la libertad de
despacho y el cumplimiento de todos los requisitos del mercado; y la planificación de la
"sub-transmisión", que incluye todas las actividades de planificación relacionados con el
transporte de energía a las subestaciones de transformación, de manera que pueden ser
distribuidos a los clientes (es netamente una función de planificación de la entrega de
potencia). En la figura 1 se muestra la relación de la planificación de la subtransmisión
con las demás etapas de planificación en el sector eléctrico [87].

Planificación de Generación
Planificación del Mercado Mayorista
Planificación de la Red de Transmisión
Planificación de la Subtransmisión
Planificación de las Subestaciones de Potencia
Planificación del Sistema de Distribución
Proyección Espacial de la Demanda
Figura 1.1 Planificación de la subtransmisión y su relación con las demás etapas de planificación
(Fuente: Power Distribution Planning Reference Book [87])
La planificación de las subestaciones de potencia es un aspecto clave en la
planificación de los sistemas de subtransmisión (figura 1). Tiene como objetivo principal,
determinar las nuevas subestaciones de potencia para el horizonte de estudio, y una
asignación adecuada de la demanda en conjunto con las existentes. Este estudio
corresponde a una etapa previa y de vital importancia en la planificación de la
subtransmisión. Una variable adicional a considerar en la planificación multietapa o
planificación dinámica, es la definición de nuevas subestaciones de potencia por etapas,
en el corto, mediano y largo plazo. En el apéndice B se desarrolla la metodología utilizada
para la planificación de subestaciones y los resultados de su aplicación en el sistema de
subtransmisión de Luz del Sur.
La aplicación de la metodología propuesta en este proyecto, considera como
información base (en cuanto a topología de la red): las barras de interconexión en muy
alta tensión (nodos de generación), la red base del sistema de subtransmisión, los
4

resultados de la planificación de subestaciones y todas las variantes de enlaces entre las
subestaciones de potencia (existentes y futuras).
1.2 Aspectos regulatorios respecto la planificación de inversiones de la subtransmisión en el sistema eléctrico peruano
Uno de los objetivos principales de la reforma del sector eléctrico peruano, iniciada
en 1992, fue el de incrementar la productividad de las empresas de electricidad,
mejorando la competitividad y eficiencia del sector eléctrico, para lo cual se establecieron
nuevas normas, contenidas principalmente en la Ley de Concesiones Eléctricas (LCE), su
reglamento y modificaciones posteriores [44, 45]. De esta manera, dentro del sector se
reconocen las actividades de generación, transmisión y distribución. Para la transmisión
se distingue dos tipos de instalaciones: el sistema principal de transmisión (SPT) y el
sistema secundario de transmisión (SST). Las tarifas correspondientes a dichos sistemas
eran establecidas en base a costos de un Sistema Económicamente Adaptado (SEA); es
decir, aquél sistema cuyo costos de inversión (tecnologías de producción y tamaños
óptimos), operación y mantenimiento permiten cubrir la demanda de la manera más
económica. Asimismo, para el caso de los “SST”, a partir del año 2002 se establece que
el horizonte de largo plazo para la determinación del SEA corresponden a un período de
quince (15) años.
Con la promulgación de la Ley 25832 publicada el 23 de julio de 2006, se modifica el
marco regulatorio de la transmisión y se introducen dos tipos de instalaciones: el sistema
garantizado de transmisión (SGT) y el sistema complementario de transmisión (SCT).
Bajo dicho esquema, el sistema de transmisión del Sistema Eléctrico Interconectado
Nacional (SEIN) está integrado por cuatro tipo de instalaciones: las instalaciones tipo
“SPT y SST”, aquéllas cuya puesta en servicio se ejecutó antes del 23 de julio de 2006; y
las instalaciones tipo “SGT y SCT”, aquellas cuya puesta en servicio se realiza con fecha
posterior a la promulgación de la citada Ley [46]. Los sistemas principal y garantizado
“SPT y SGT” están conformados por los sistemas de transmisión troncal y regional del
SEIN, y permiten el intercambio de electricidad y la libre comercialización de la energía
eléctrica; los sistemas secundario y complementario “SST y SCT” están conformados por
los sistemas de transmisión local, las cuales conectan las cargas o las centrales de
generación al SEIN [55]. En el sector eléctrico, los sistemas “SST y SCT” son
denominados como “sistemas de subtransmisión”.
Respecto a los sistemas de subtransmisión “SST y SCT”, la normatividad vigente
reconoce tres tipos de instalaciones: de demanda “SSTD y SCTD”, conformada por
5
aquellas instalaciones destinadas a transportar la energía desde los puntos de
interconexión con la transmisión hasta la distribución; de generación “SSTG y SCTG”,
conformada por aquellas instalaciones que sirven para transportar la energía producida
por los generadores hasta los puntos de interconexión con la transmisión; y los de
generación/demanda “SSTGD y SCTGD”, utilizado para los dos fines [56]. Para dichas
instalaciones, las normas vigentes establecen la necesidad de contar con un Plan de
Inversiones cada cuatro (04) años y su ejecución es de carácter obligatorio. Dicho plan
debe ser elaborado y propuesto por todos los Agentes del sistema que cuentan con
instalaciones “SST y SCT”. Es competencia del organismo regulador (OSINERGMIN)
aprobar los respectivos planes de inversión para su reconocimiento a través de la tarifa
eléctrica [47].
Las normas vigentes establecen que los Planes de Inversión aprobados deben ser el
resultado de un estudio de planificación de la expansión para un horizonte de treinta (30)
años en el largo plazo, diez (10) para el mediano plazo y cuatro (04) para el corto plazo,
para este último se establece una evaluación año a año; además se establece evaluar los
años cinco (05) y ocho (08), respectivamente. Asimismo, se establece el cumplimiento
obligatorio de las tolerancias en cuanto a los niveles de tensión y capacidad de las
instalaciones, y la necesidad de justificar la redundancia del sistema bajo el criterio de
confiabilidad “n-1” [56].
En cuanto a la metodología, se establece un enfoque determinista basado en el
análisis de alternativas de expansión excluyentes entre sí. Bajo dicho esquema, la
solución óptima corresponde a aquella alternativa técnicamente factible y con menores
costos de inversión, operación y mantenimiento, y pérdidas. El proceso de expansión de
cada alternativa evaluada, consiste en determinar la configuración para el año horizonte y
el desarrollo progresivo de la red en el corto y mediano plazo, en todos los casos,
teniendo siempre como objetivo la configuración definida para el año horizonte [56]. La
viabilidad técnica de las alternativas es obtenido de los estudios de flujos de potencia,
cortocircuito y de confiabilidad.
1.3 Importancia del planeamiento de la expansión de los sistemas de subtransmisión
En la planificación de los sistemas de transmisión, la subtransmisión y distribución
están representadas por cargas concentradas en las barras de interconexión y/o nodos
de generación, las cuales representan aguas abajo a toda la carga atendida por las
distribuidores y clientes en alta tensión. La necesidad de nuevos nodos de generación,
6

involucra conocer la dinámica del crecimiento de la subtransmisión; sin embargo, ésta
tarea no forma parte del problema del planeamiento de la expansión de la trasmisión. Por
lo tanto, una tarea importante a tomar en cuenta en los procesos de planeamiento de la
subtransmisión es la determinación de los futuros nodos de generación y/o barras de
interconexión al sistema.
El planeamiento de la subtransmisión es de vital importancia para proporcionar un
servicio de abastecimiento de energía con buena calidad, bajo costo, con el menor riesgo
y con los menores impactos económicos y ambientales para la sociedad. No efectuar un
estudio de planeamiento o realizarla de forma inapropiada, ocasiona consecuencias
negativas que conducen a operaciones ineficientes. Una planeación optimista ocasiona
un exceso en la capacidad instalada, ocasionando pérdidas económicas al inversionista y
a los usuarios del servicio debido al incremento de la tarifa; por otra parte, una planeación
pesimista conduce a la pérdida de la calidad del servicio, provocando racionamientos de
carga debido a las restricciones de capacidad del sistema. Por lo tanto, la planificación
del sistema de subtransmisión impacta en el mercado eléctrico de tres aspectos
importantes: 1) tarifas eléctricas e inversiones eficientes, 2) posible reducción de
pérdidas; y 3) representa un insumo importante para el planeamiento de la expansión de
los sistemas de transmisión.
De acuerdo a los aspectos de carácter técnico y económico, el segmento de la
subtransmisión posee características de monopolio natural en la industria eléctrica. Bajo
ese contexto, las entidades normativas han establecido mecanismos para que dicho
sistema funcione de manera eficiente, estableciendo normas y procedimientos para una
adecuada planificación y su reconocimiento a través de la tarifa eléctrica. Estas
exigencias normativas han motivado al inversionista a una planeación de inversiones
cada vez más eficiente, e allí que la planificación eléctrica de la subtransmisión es una de
las tareas más importantes que enfrentan actualmente las empresas distribuidoras y
transmisoras.
En el ámbito nacional, con la reforma del sector eléctrico iniciada el año 1992 y los
constantes cambios en el marco regulatorio, se asigna al organismo regulador la tarea de
aprobar los planes de inversión de los sistemas de subtransmisión cada cuatro (04) años,
la cual es de cumplimiento obligatorio [45] y es el resultado del planeamiento de la
expansión en el corto, mediano y largo plazo, abarcando un horizonte de hasta 30 años
[56]. Los proyectos que no forman parte de dicho plan no son reconocidos en la tarifa
eléctrica. Este último punto a considerar, es de vital importancia en el desarrollo de los
7

estudios de planeamiento, ya que elimina la posibilidad de obtener soluciones de corto
plazo (con inversiones mínimas) que resultan ineficientes en el mediano y largo plazo.
Debido a dichas reformas, cada cuatro años, los Agentes del sector están en la
necesidad de elaborar sus respectivos estudios de planeación, con el objeto de presentar
una propuesta de plan de inversiones, el cual debe ser revisado y aprobado por el
regulador. Ante una omisión, el regulador está autorizado a elaborar dicho estudio de
planeación y aprobar un plan de inversiones para afrontar el crecimiento futuro de la
demanda, y evitar poner en riesgo la operación de dicho sistema y el suministro de
energía a los usuarios. Estos menesteres, tanto en los Agentes del sistema y el
regulador, reafirman la importancia de realizar los estudios de planeamiento de la
expansión en la subtransmisión, con el objeto de definir un plan de inversiones en el corto
plazo.
1.4 Motivación para el estudio de planeamiento de la subtransmisión
La mayoría de estudios realizados en este campo, está orientada a resolver el
problema de la subtransmisión en base a métodos tradicionales, los cuales en su mayoría
no son rigurosos ya que no contemplan métodos y algoritmos de optimización, y técnicas
para mitigar el riego. Dadas las características de estos sistemas, con pocos nodos de
generación y generalmente de menor dimensión que los sistemas de transmisión (como
el caso peruano); considerar los aspectos del planeamiento multietapa, confiabilidad a
través de criterio n-1 e incertidumbres, motiva la investigación ya que permite explorar
nuevas alternativas de solución que pueden producir beneficios económicos y operativos
en los sistemas reales.
Con el presente estudio se pretende dar un aporte metodológico basado en un
modelo de optimización y técnicas de análisis de riesgos, con el objeto de proponer
planes de inversión eficientes y sólidos en el corto plazo a partir de la verificación de su
necesidad en el mediano y largo plazo, a fin de superar las deficiencias existentes en los
métodos de planificación tradicionales en esta materia. Asimismo, formar parte de una
base para futuros desarrollos y estudios de investigación, y prestar su atención en este
campo a futuras investigaciones, es una motivación particular en el desarrollo de este
proyecto.
En el plano nacional, la necesidad de contar con un plan de inversiones flexible y
sostenible en el tiempo, es un reto adicional que debe ser considerado en los estudios de
8

planeamiento de la expansión de los sistemas de subtransmisión; esto motivo la
elaboración de este proyecto en este campo.
1.5 Objetivos de la investigación
Los objetivos planteados son los siguientes:
a) Objetivo general
El objetivo general de este trabajo es desarrollar e implementar una metodología
para la planificación de inversiones en los sistemas de subtransmisión; para lo cual se
integra el modelo de transportes, la técnica Branch and Bound y un algoritmo de flujo de
potencia para resolver el problema del planeamiento de la expansión y la técnica del
trade off/risk para obtener un plan de expansión con menores riesgos debido a las
incertidumbres.
b) Objetivos específicos
• Formular el problema de la expansión de los sistemas de subtransmisión
considerando: planificación estática, planificación estática con n-1, planificación
dinámica, planificación dinámica con n-1 y la planificación dinámica con n-1para los
enlaces radiales.
• Validar los modelos del punto anterior en los sistemas Garver e IEEE 24 barras.
• Aplicar la metodología propuesta al sistema de subtransmisión de Luz del Sur.
c) Interrogantes por resolver
En el ámbito del proceso de búsqueda y elección de una metodología de
planificación de la expansión de la red de manera sistematizada, el presente estudio
deberá absolver las siguientes interrogantes:
• ¿Existen metodologías que obtengan planes de expansión de la subtransmisión
óptimos?
• ¿Cómo afecta el riesgo económico en la determinación de un plan de expansión de
la subtransmisión?
• ¿Las metodologías de búsqueda pueden complementarse con otras para lograr
mitigar el riesgo económico y ayudar así en la toma de decisiones con fines de
obtener un plan de expansión flexible y sostenible en el tiempo?
9

1.6 Justificación
En la planificación de la red de subtransmisión, el proceso de búsqueda y toma de
decisión del plan de expansión resulta ser un proceso de alta complejidad debido a la
gran cantidad de combinaciones posibles a ser analizadas, que en una manera
sistematizada se centran básicamente en resolver problemas de optimización
matemática. De no contar con un proceso sistematizado, se pueden tomar decisiones
afectadas por criterios particulares y como consecuencia soluciones más costosas.
En el ámbito nacional no se cuenta con estudios basados en técnicas especializadas
para el desarrollo de la expansión de los sistemas eléctricos de subtransmisión.
Asimismo, dada su importancia en el transporte de energía y debido a las exigencias del
organismo regulador en la determinación de inversiones, existe la necesidad de
desarrollar e implementar una metodología de la expansión para dicho sistema y que
sirva de base para la planificación de inversiones.
Debido a las necesidades planteadas, el presente trabajo contribuye con poner a
disposición una metodología basada en la bibliografía especializada sobre el tema, con el
fin de lograr satisfacer el requerimiento mencionado. Adicionalmente, la metodología
propuesta incluye técnicas para la mitigación del riesgo debido a las incertidumbres.
1.7 Estructura del Trabajo
El trabajo se encuentra organizado de la siguiente forma:
Inicialmente se presenta un capítulo de introducción con aspectos importantes
relacionados con los sistemas de subtransmisión, como la necesidad del planeamiento de
la expansión y sus alcances, el reconocimiento de inversiones en sistema peruano y las
motivaciones de la investigación en este campo. Se presentan también los objetivos,
justificación, alcances y limitaciones del presente proyecto de investigación.
En el capítulo 2 se presenta una descripción del problema del planeamiento de la
expansión en los sistemas de subtransmisión considerando los aspectos de tiempo
(horizonte y etapas intermedias), confiabilidad (criterio n-1) y riesgos; asimismo, se
describe la problemática de la planificación en el ámbito nacional. Se complementa con
una breve descripción de los problemas resueltos en el planeamiento de la expansión
según la literatura especializada.
10

En el capítulo 3 se detallan los modelos matemáticos utilizados en el desarrollo de la
investigación, los algoritmos de optimización para resolver el problema y las técnicas de
análisis de riesgos como parte del proceso de solución.
En el capítulo 4 se describe la metodología propuesta en este trabajo para la
obtención de un plan de inversiones “flexible” que permite incorporar el análisis de
riesgos.
En el capítulo 5 se muestran las pruebas realizadas a los modelos Garver e IEEE 24
barras. Asimismo, en el capítulo 6 se aplica la metodología propuesta en el sistema de
subtransmisión de Luz del Sur.
Finalmente se muestran los aportes y conclusiones, y se proponen trabajos para
investigaciones futuras.
11

CAPÍTULO II PROBLEMA DEL PLANEAMIENTO DE LA EXPANSIÓN DE SISTEMAS DE
SUBTRANSMISIÓN ELÉCTRICA
En los últimos años, aspectos como: el desarrollo de nuevas tecnologías de
generación de energía eléctrica de menor escala (generación distribuida), la falta de
inversión privada en el segmento de la subtransmisión, la dificultad de conseguir
autorizaciones para nuevas trazas, la operación de los sistemas eléctricos con menores
márgenes de confiabilidad y principalmente la presencia de significativas incertidumbres
en las decisiones de mediano y largo plazo, han modificado y complicado aún más la
tarea de los planificadores de conducir satisfactoriamente la expansión de los sistemas
de subtransmisión. Dichas incertidumbres se han profundizado a tal punto que los
métodos usualmente empleados para resolver la tarea de planificación, basados en un
enfoque tradicional determinista, carecen de eficacia y resultados prácticos.
En la práctica se producen con frecuencia significativas desadaptaciones entre la
capacidad de transporte y el crecimiento de la demanda. Por ello, los planes de
expansión propuestos, cuyo objetivo principal es la de minimizar los costos; usualmente
son ineficientes debido a que requieren de continuos ajustes y/o inversiones adicionales
con el objeto de mitigar las consecuencias económicas negativas de tales
desadaptaciones. El planeamiento de la expansión se traduce entonces, en un problema
de decisión/optimización cuyo objetivo es la selección de un plan “flexible”, que permita
una adecuada operación del sistema y mitigue las consecuencias económicas negativas
ocasionadas debido a las incertidumbres propias de un sistema.
El planeamiento de un sistema eléctrico particular, parte de su topología existente y
busca encontrar dónde y cuántos elementos deben ser adicionados al sistema para que
opere adecuadamente en un futuro, asegurando el transporte de energía y reduciendo el
riesgo de racionamiento y la ejecución de inversiones subutilizadas. El planeamiento
además puede contener aspectos como: cuándo deben ser adicionados los elementos
de transmisión, denominado también, planeamiento en múltiples etapas o planeamiento
dinámico; y de seguridad del sistema, representadas generalmente por el criterio “n-1”;

dichas variables hacen mucho más complejo aún el problema de la expansión de la
transmisión, respecto al problema clásico de planeamiento estático.
La normativa peruana respecto al planeamiento de la expansión de los sistemas de
subtransmisión, considera un horizonte de planeamiento de hasta 30 años para el largo
plazo, y el análisis de los años 01, 02, 03, 04, 05, 08 y 10 el corto y mediano plazo;
establece también, sustentar la redundancia del sistema bajo el criterio de confiabilidad
“n-1” [56]. En este estudio se resuelve este problema utilizando el modelo de transportes
y la técnica de optimización del Branch and Bound, implementado en el software libre
CBC o GUSEK.
2.1 Principales herramientas en la planificación de sistemas de subtransmisión
La planificación de la subtransmisión se traduce en verificar el cumplimiento de los
criterios de calidad, capacidad, seguridad y confiabilidad establecidos en los procesos de
planeación de la expansión. A continuación se describe brevemente las principales
herramientas utilizadas para evaluar dicho criterios.
Análisis de flujo de potencia
El flujo de potencia es la herramienta básica para determinar el estado de una red en
régimen estacionario. El análisis consiste en determinar el flujo de potencia activa y
reactiva en los elementos de la red y las magnitudes de tensión en todas las barras.
Asimismo, verificar el cumplimiento de las restricciones de capacidad del sistema y su
operación dentro de los límites establecidos en la normatividad. Las ecuaciones del flujo
de potencia son de carácter no-lineal, por lo que se tiene que recurrir a métodos iterativos
para resolver tales ecuaciones.
Análisis de contingencias
El análisis de contingencias es una herramienta que permite evaluar la seguridad con
la que se opera un sistema. El objetivo es determinar si existe alguna condición insegura
en la red después de la pérdida de un elemento en el sistema de transmisión. Para
evaluar el estado de la red después de la salida de un elemento se pueden utilizar los
flujos de potencia; sin embargo, esto demandaría un gran esfuerzo computacional. En la
práctica se usan algoritmos simplificados que permite evaluar la seguridad de la red de
forma más eficiente.
Evaluación de la confiabilidad
13
La confiabilidad de un sistema es la probabilidad de una operación satisfactoria
durante un periodo de tiempo. Denota la capacidad para suministrar un adecuado servicio
eléctrico con pocas interrupciones sobre un determinado periodo. Existen dos enfoques
para analizar la confiabilidad de un sistema: el método de contingencias, que consiste en
una selección y evaluación sistemática de eventos en el sistema; y la simulación de
Montecarlo [71], que consiste en generar aleatoriamente diversos estados del sistema y
calcular los índices de confiabilidad respectivos. En la práctica ambos enfoques se
complementan.
2.2 Tratamiento del tiempo en el planeamiento
El horizonte de planeamiento (corto, mediano y largo plazo) juega un rol importante
en la planificación de los sistemas eléctricos. De acuerdo al período de estudio, la
expansión del sistema puede ser resuelta a través de una planificación estática y/o
planificación dinámica (multietapa). El estático es más simple de resolver que el
dinámico, debido a que este último toma en consideración las restricciones de tiempo que
acoplan la evolución del sistema año tras año dentro del horizonte de planificación, lo
cual ocasiona mayores esfuerzos computacionales. En tal sentido, la planificación de la
expansión en los sistemas de subtransmisión puede ser analizada como un problema
estático o dinámico dependiendo de la forma como se considere el horizonte de
planificación y el tipo de inversión a realizar.
En la planificación estática, el tiempo no es importante en la realización de los
proyectos, el objetivo es la búsqueda de la solución óptima para el horizonte de
planificación. En general, se resuelve el problema para un horizonte de largo plazo; para
el mediano y corto plazo, el planificador representa el modelo eléctrico del sistema con un
mayor grado de detalle y efectúa los estudios de flujo de potencia, cortocircuito,
confiabilidad y estudios económicos. Finalmente, se elabora el Plan de Inversiones para
el sistema.
En cambio, la planificación dinámica propone un plan de proyectos, y por ende, una
secuencia temporal de la realización del plan óptimo. Lo que busca es optimizar las
inversiones en el corto, mediano y largo plazo, mediante la incorporación del tiempo
como variable de decisión. Se considera que los resultados de este tipo de modelos es
más completo; sin embargo, se convierte en un problema muy complejo, ya que no sólo
toma en cuenta el número y ubicación de los elementos en el sistema, sino define el
tiempo en que éstos serán instalados considerando el costo de oportunidad del capital
14
invertido; precisamente, debido a la inclusión de estas nuevas variables, las restricciones
y el esfuerzo computacional para resolver el problema aumentan.
En el ámbito nacional no se cuenta con estudios que contemplan la planificación
dinámica en el planeamiento de la expansión de los sistemas de transmisión y
subtransmisión. Para el caso de la subtransmisión, la normatividad establece la
necesidad de aprobar planes de inversión cada cuatro años, las cuales a su vez,
obedecen a un planeamiento de 30 años para el largo plazo y de años intermedios (01,
02, 03, 04, 05, 08 y 10) para el mediano y corto plazo; por tanto, existe la necesidad de
formular y resolver el problema de la planificación dinámica en la expansión de dichos
sistemas, con el objeto de formular el plan de inversiones de corto plazo.
2.3 Tratamiento del criterio de confiabilidad “n-1” en el planeamiento
La incorporación de políticas de regulación en seguridad y confiabilidad, plantea
nuevos escenarios competitivos en los cuales el problema de inversión en la expansión
del sistema juega un papel crucial debido a que permanentemente se debe acondicionar
la estructura del sistema eléctrico para permitir la integralidad operativa del sistema. En
tal sentido, el problema del planeamiento de la expansión debe evolucionar y tomar en
cuenta desde el inicio del planeamiento dichas políticas de regulación.
Uno de los criterios de confiabilidad más utilizados en la planificación y operación de
los sistemas eléctricos es el “criterio “n-1”, el cual consiste en simular la pérdida o falla de
un elemento de la red de manera que el resto del sistema pueda afrontar dicha falla sin
que se genere una caída del sistema, o provoque una operación de las instalaciones por
sobre sus capacidades permitidas. Una forma de enfrentar dicho problema, es mediante
la ejecución de mayores inversiones en la infraestructura de la red, la cual es bien vista
por los Agentes del sistema, pues se asegura una operación confiable y una rentabilidad
sobre los costos de inversión, operación y mantenimiento; no obstante, esta opción es la
menos preferida por quiénes ven encarecido el precio de su energía al pagar por una
infraestructura de transporte adicional.
Existen dos formas de realizar el planeamiento de la expansión de sistemas
eléctricos considerando contingencias. En la primera, el planeamiento es realizado en
dos fases, en la primera fase se encuentra el plan óptimo sin contingencias
(planeamiento tradicional), y en la segunda fase, se toma el plan de expansión obtenido
previamente y se adicionan nuevos circuitos simulando la salida de cada circuito
considerando el criterio de contingencia simple “n-1”. Para adicionar los circuitos en la
15

fase 2 se utiliza el mismo criterio que se empleó en la fase 1. La segunda propuesta es
introducir el criterio de contingencias “n-1” desde el comienzo del planeamiento, o sea
que cada configuración propuesta por el algoritmo de solución ya tiene en cuenta el
criterio de contingencia [06, 22, 73].
En el sistema peruano, la aplicación del criterio de confiabilidad “n-1” en la
planificación de los sistemas de subtransmisión ha sufrido cambios importantes desde la
publicación del Reglamento de la Ley de Concesiones Eléctricas (LCE), hasta el día de
hoy. Al principio se regía por decisiones de libre mercado y estaba supeditada a las
decisiones de los demandantes y oferentes; este problema intentó ser resuelto el año
2008, mediante la inclusión del criterio “n-1” en la regulación; sin embargo, los resultados
de su aplicación fueron negativos debido al incumplimiento en la ejecución de los
proyectos por el alto nivel de inversiones. A consecuencia de dichos resultados, la
normatividad vigente (modificada el 2013) establece que la necesidad de la redundancia
bajo el criterio “n-1” debe ser justificada [56]. En tal sentido, para el presente estudio se
incluye a la formulación del problema cumplir con el “n-1” en todos los enlaces radiales;
de este modo se evita una salida total de la subestación de potencia.
2.4 Tratamiento de las incertidumbres en el planeamiento
En los últimos años, debido a diversos cambios que han tomado lugar en los
mercados eléctricos, las incertidumbres se han profundizado a tal punto que los métodos
usualmente empleados para resolver la tarea de la planificación de expansión de los
sistemas eléctricos carecen de eficacia y de resultados prácticos. En la práctica, con
frecuencia se producen significativas desadaptaciones entre la capacidad transporte y el
crecimiento de la demanda. Por ello, los planes de expansión propuestos, al requerir
continuos ajustes y/o inversiones adicionales (realizados con el objeto de mitigar las
consecuencias económicas negativas de tales desadaptaciones), usualmente son
ineficientes.
Un camino sólido y prometedor para enfrentar adecuadamente las incertidumbres del
problema es invertir en planes de expansión flexibles, los cuales permitan al planificador
responder con decisiones contingentes ante la ocurrencia de escenarios adversos. Un
ejemplo palpable en el caso peruano, es el desarrollo del “plan de transmisión” mediante
un enfoque basado en incertidumbres, establecido como parte de la política de regulación
en la transmisión; que a diferencia del enfoque tradicional determinista (un solo
escenario), está basado en la evaluación de una cantidad limitada de escenarios. Al
respecto, uno de los objetivos de este proyecto es introducir como aporte en la
16

planificación de los sistemas de subtransmisión, una técnica para evaluar los “riesgos e
incertidumbres” y proponer futuros cambios a la regulación vigente respecto a los
sistemas “SST y SCT”.
2.5 Optimización en el planeamiento de la expansión
La planificación de la expansión es un problema clásico de la ingeniería eléctrica que
ha tomado gran importancia en los sistemas eléctricos de hoy en día. Existen diversas
metodologías que se han propuesto para solucionar el problema. El primer intento de
solución consistía en evaluar directamente alternativa por alternativa hasta hallar la mejor
de entre todas las opciones, sin duda, un gran esfuerzo computacional. A medida que
avanzaron las investigaciones en el tema, surgieron metodologías más sofisticadas que
permiten identificar las alternativas de planificación más atractivas sin necesidad de un
esfuerzo computacional exhaustivo. La aplicación de técnicas de optimización son
algunas de las herramientas utilizadas para resolver el problema.
En la actualidad, la metodología basada en técnicas de optimización es utilizada para
formular el problema de la planificación de la expansión. Esta metodología minimiza los
costos de inversión sujeto a las ecuaciones de la red y los criterios de planificación,
recurriendo a la teoría de la investigación de operaciones para obtener soluciones. La
ventaja respecto a las metodologías tradicionales es que permite el estudio de un gran
número de alternativas y escenarios, en tiempos relativamente cortos.
Desde el punto de vista de la optimización, el modelo ideal del problema de la
planificación corresponde a un problema de programación no lineal entera mixta. Al
respecto, hasta el momento no existe ninguna técnica de solución que asegure obtener
el óptimo global para sistemas de gran tamaño. No obstante, mediante simplificaciones
pueden obtenerse soluciones bastante aproximadas [68].
Los primeros trabajos comenzaron con modelos linealizados del problema y se
plantearon los llamados algoritmos heurísticos como técnica de solución. Posteriormente
se aplicaron técnicas de solución basadas en algoritmos de optimización clásica entre las
que se incluyen la descomposición de Benders y el algoritmo Branch and Bound. Dichos
algoritmos pueden hallar soluciones óptimas y son bastante eficientes en la solución de
problemas de pequeño y mediano tamaño, pero a costa de grandes simplificaciones en el
modelamiento matemático; sin embargo, para problemas de gran tamaño con variables
de naturaleza real y entera, se presentan problemas de convergencia y elevado esfuerzo
computacional [35].
17

En el Perú, la planificación de la subtransmisión basada en técnicas de optimización
no ha sido un tema muy investigado. En este trabajo, se propone utilizar el “modelo de
transportes” para formular el problema de la expansión, y la aplicación de la técnica del
Branch and Bound para la obtención de los planes de expansión.
2.6 Trabajos de planeamiento en el sistema de subtransmisión peruano
Hasta el año 2001 la planificación de los sistemas de subtransmisión fueron
desarrollados en base a modelos y métodos simplificados y sin contemplar el horizonte
de largo plazo. Esto originó un vacío considerable en el cálculo de las tarifas eléctricas
correspondientes a dichos sistemas, provocando ineficiencias en los inversionistas y los
usuarios de electricidad. A partir del año 2002, para obtener tarifas eléctricas que
representen apropiadamente las inversiones ejecutadas, se desarrolla el planeamiento de
la expansión de dichos sistemas considerando los criterios establecidos en la
normatividad vigente en dicho momento, entre las más relevantes: la determinación de
un sistema económicamente adaptado (SEA) y un horizonte de planeamiento de quince
(15) años. A continuación se describe algunos:
• EDELNOR (2002), para la definición del SEA correspondiente a la zona de concesión
de Lima Norte, desarrolló la planificación de su sistema considerando el período
comprendido entre los años 2000 y 2014 (15 años). Entre los criterios empleados
para determinar el SEA, destacan: El desarrollo de la red de subtransmisión cuya
configuración es diferente al existente, es decir, se determinan nuevas ubicaciones
para las subestaciones y nuevos enlaces entre ellos; asimismo, desarrolla el criterio
“n-1” para el caso de líneas y subestaciones. En este estudio, por primera vez se
utilizó una metodología de optimización basado en el “modelo de transportes” en la
obtención del plan de largo plazo (año 15). La determinación de los años intermedios
y aplicación del criterio “n-1”, fue resuelto a través de simulaciones de flujo de
potencia [09].
• Hidrandina, Electrocentro, Electronorte y Electronoroeste (2002), en estos casos, el
criterio general empleado para la determinación del SEA fue el principio de
adaptación económica de sus instalaciones de transmisión existentes y el
cumplimiento de los niveles de calidad y seguridad establecidos en la norma técnica
de calidad. El horizonte de planeamiento abarcó un período de 10 años (2002-2011)
[12].
18
• LUZ DEL SUR (2003), en este caso, entre los criterios empleados para determinar el
SEA correspondiente a la zona de concesión de Lima Sur, destacan: considera como
base inicial la configuración del sistema existente en cuanto a ubicación de
subestaciones y topología de la red (previamente, elimina redundancias); asimismo,
desarrolla el criterio “n-1” para el caso de líneas, y plantea transformadores de
reserva para las subestaciones. La metodología desarrollada comprende: 1)
desarrolla la expansión de subestaciones utilizando la técnica de los polígonos de
Voronoi; 2) determina la configuración de la red para el año horizonte, en base a un
proceso iterativo en los cuales se plantean y procesan varias alternativas, y de éstas
se selecciona la de mejor costo y técnicamente factible, y; 3) se desarrolla
progresivamente la expansión del sistema “año-año”, tomando como punto de partida
el año base y como objetivo la configuración del año horizonte, previamente
obtenido. El horizonte de planeamiento abarcó un período de 15 años (2003-2017)
[39].
Debido a los cambios en el marco regulatorio de la transmisión [46], las normas y
procedimientos publicados a partir del 2006 establecieron una metodología para el
planeamiento de la expansión de la subtransmisión basado en un enfoque determinista
(metodología de evaluación directa de alternativas), la cual consiste en evaluar distintas
alternativas de expansión y seleccionar aquella que constituye la solución de mínimo
costo de inversión, operación y mantenimiento, y pérdidas. En el proceso de expansión
de cada alternativa, se determina la configuración para el año horizonte (30), luego se
define el desarrollo progresivo de la red en el corto (04 años) y mediano plazo (año 10);
en todos los casos, teniendo siempre como objetivo la configuración del sistema definido
para el año horizonte. Asimismo, a través de los flujos de potencia, se determina la
viabilidad técnica de cada alternativa propuesta [56].
Como consecuencia de la aplicación de dichas normas, a partir del 2006, los
Titulares de los sistemas de subtransmisión utilizan dicha metodología en los estudios de
planeamiento de la expansión para proponer sus planes de inversión respectivos [10, 11,
40, entre otros]. El año 2013, Luz del Sur plantea una metodología de optimización
utilizando el modelo de transportes y la técnica del Branch and Bound para resolver el
problema de la expansión de largo plazo (modelo estático) [41].
2.7 Trabajos que han considerado el problema de planeamiento de la expansión
La mayoría de estudios realizados en este campo, está orientada a resolver el
problema de la transmisión; sin embargo, es importante hacer notar que la
19

subtransmisión cuenta con características similares que posibilitan la aplicación de la
literatura especializada a dicho sistema. Para este caso, los nodos de generación
quedarían representados por las barras de interconexión, y los nodos de carga por las
subestaciones de potencia.
El problema de planeamiento de la expansión de la transmisión ha tenido una
evolución tanto en el modelo matemático usado para representar el problema como en la
forma de resolver el problema resultante. Garver fue el primero en proponer un modelo
basado en el concepto de flujo de carga y también fue el primero en sugerir el uso de
técnicas de optimización para resolver el problema resultante [26]. Luego, se
desarrollaron métodos de optimización matemática exacta que combinan programación
lineal y programación dinámica [34], y los denominados métodos heurísticos
constructivos basados en sensibilidad [50].
De los anteriores trabajos, surgen en la literatura especializada varias
investigaciones con el propósito de desarrollar modelos para resolver este problema
utilizando técnicas exactas como la programación lineal [84], descomposición de Benders
[03, 69, 70], programación lineal entera mixta [01, 67], algoritmo de Branch and Bound
[30, 61], programación no lineal [72], y el método de punto interior [62]; técnicas basadas
en heurísticas, dividiéndose en funciones de sensibilidad [50, 58] y en funciones
sigmoides [50]; después se desarrollaron los métodos clasificados como sistemas
inteligentes, como son: algoritmos genéticos [24, 65, 75], simulated annealing [64],
búsqueda tabú [23], greed y randomized adaptive search procedure (GRASP) [04], teoría
de juegos [07, 78], entre otros. Asimismo, existen trabajos que consideran modelos
diferentes en el planeamiento de la expansión, siendo representados a través de los
modelos híbridos [25], modelo AC [60], modelado de flujo de potencia óptimo [02] ó a
través de modelos lineales relajados obtenidos a partir del método de flujo de carga AC
[80].
Puede encontrarse una revisión de las publicaciones y modelos que han sido
utilizados para el problema de planeamiento en [36, 66]. En [69] se encuentra un
resumen de los tipos de planeamiento, y en [37] se presenta una clasificación de los
algoritmos utilizados. En [13] también se presenta un resumen de los diversos trabajos
realizados en el planeamiento de la transmisión.
20

2.8 Trabajos que han considerado el problema de planeamiento con variaciones respecto al tradicional
Dentro el proceso de incorporación de aspectos económicos en el planeamiento de
la expansión, los estudios de planeamiento deben considerar condiciones de
competencia [54, 82, 86], diferentes escenarios de operación [16, 19, 20, 21, 32, 33],
condiciones de seguridad y/o confiabilidad [05, 77, 83], condiciones de confiabilidad y
riesgo [05, 73], entre otros.
Otros aspectos que afectan el planeamiento de la transmisión son la incertidumbre
en la demanda y la generación futura [18, 76, 81], el análisis de confiabilidad incluyendo
la incertidumbre en la demanda y generación futura [51, 52], los que consideran
incertidumbre en el mercado de electricidad [88]; asimismo, existen trabajos que
consideran múltiples objetivos, como en [42, 43, 48], entre otros.
Con relación al periodo de tiempo analizado, el planeamiento puede realizarse en un
horizonte de tiempo (tradicional) o puede analizarse un periodo de interés en varios
intervalos de tiempo (planeamiento de múltiples etapas) [14, 29, 74]. Luego, es de gran
importancia la inclusión de restricciones que ayuden a disminuir el espacio de solución
tanto en el planeamiento tradicional [27] como en el de múltiples etapas [15, 43, 85].
21

CAPÍTULO III MODELOS MATEMÁTICOS UTILIZADOS PARA REPRESENTAR EL PROBLEMA DE
PLANEAMIENTO Y TÉCNICAS DE SOLUCIÓN
El problema de la expansión de la subtransmisión, es un problema clásico de los
sistemas de energía eléctrica y su modelo matemático ideal corresponde a un problema
de programación no lineal entero mixto (PNLEM); además de eso, posee el fenómeno de
explosión combinatoria y un número muy elevado de óptimos locales, lo que lleva a la
mayoría de métodos aproximados a parar en una solución óptima local, muchas veces de
baja calidad. La solución de este problema posee dos etapas consecutivas claramente
definidas: el modelo matemático para la formulación, y la técnica de solución escogida
para resolver dicha formulación.
Existen varios modelos matemáticos que se pueden usar en la planificación de la
expansión de sistemas de subtransmisión, el ideal es el modelo de flujo de carga AC
(modelo AC); a partir de este modelo se obtienen diversas versiones simplificadas, entre
ellas: el modelo de transportes, el modelo DC, los modelos híbridos (lineal y no lineal) y el
modelo lineal disyuntivo. El modelo AC es la representación más realista de la red ya que
planifica de forma integral la potencia activa y reactiva; sin embargo, es poco utilizado en
los estudios de planeamiento de la expansión debido a que no se cuenta con una técnica
de optimización eficiente para resolver este problema bastante complejo y de difícil
solución. En la literatura especializada el modelo DC es el más utilizado en estudios
planteamiento de la expansión estática con horizontes de largo plazo; sin embargo, la
inclusión de variables que incluyen aspectos como el planeamiento multietapa (dinámico),
seguridad e incertidumbre en la demanda, hacen que el modelo DC encuentre apenas
soluciones de buena calidad, debido a su elevada complejidad. El modelo de transporte,
debido a su representación más simplificada de la red, es de menor complejidad respecto
a los modelos DC y AC; por tanto, es posible considerar en la formulación del problema,
aspectos como la planificación multietapa y el criterio de confiabilidad “n-1”.
Las técnicas utilizadas para resolver el problema del planeamiento de la expansión
se clasifican en técnicas basadas en algoritmos heurísticos, algoritmos de optimización
clásica y metaheurísticas. Los algoritmos de optimización clásica son los únicos capaces
de obtener el óptimo global; sin embargo, para problemas de gran tamaño presentan
problemas de convergencia debido a su elevado esfuerzo computacional. Por otro lado,
para afrontar el problema de las incertidumbres en el sistema, se utilizan técnicas de
toma de decisiones para la mitigación del riesgo, mediante los cuales es posible
encontrar una solución flexible y robusta en el horizonte de planeamiento. Entre las
técnicas más utilizadas se tiene: la técnica de costo esperado, la técnica de costo de
oportunidad máximo, la técnica Hurvicz y la técnica de compromiso/riesgo (trade off/risk).
A continuación se describen los modelos matemáticos usados en la planificación de
la expansión de los sistemas de transmisión y/o subtransmisión. De la misma forma se
exponen las técnicas de solución propuestas por los investigadores en ésta área.
3.1 Modelos matemáticos
Existen varios modelos matemáticos que se pueden usar en la planificación de la
expansión de sistemas de subtransmisión. Generalmente estos modelos matemáticos
son versiones simplificadas del modelo ideal de operación, modelo AC. En este capítulo,
analizaremos los siguientes modelos matemáticos: (1) modelo de transporte, (2) modelos
híbridos, (3) modelo DC, (4) modelo lineal disyuntivo y (5) modelo AC.
3.1.1 Modelo de transportes
El modelo de transporte fue la primera propuesta de modelo matemático usado con
bastante éxito en la planificación de sistemas de transmisión. Fue propuesto por Garver
en [26] y dio inicio a una forma sistemática para resolver el problema de la planificación
de la expansión. Utiliza la programación lineal (PL) y sirve de base para evaluar la
complejidad de cualquier sistema de prueba, así como herramienta de desarrollo de
nuevas propuestas para adaptarlas al problema de planeamiento, razón por lo cual se
utiliza ampliamente en muchas investigaciones.
Debido a los grandes problemas de usar el modelo de carga AC (utilizado
generalmente para los análisis de la operación), Garver sugiere el uso de modelos más
simples que permitan encontrar topologías o configuraciones atractivas para el
crecimiento del sistema eléctrico, de manera que estas propuestas sean aproximadas. De
esta forma, sugiere la utilización de un modelo matemático que debe satisfacer
solamente la primera ley de Kirchhoff (aplicada a las barras o nodos); es decir, las
potencias que ingresan a la barra son iguales a las potencias que salen de dicha barra.
Obviamente, esta representación es la menos adecuada ya que no incluye en la
23

formulación del problema a la segunda ley de Kirchhoff (aplicada a los lazos o enlaces);
por lo tanto, la solución encontrada puede ser la menos adecuada en un problema real. A
continuación se desarrolla la formulación matemática del problema de planificación de la
expansión utilizando el modelo de trasportes, en la cual el objetivo es encontrar la
solución con menores costos de inversión:
Min. 𝑣 = ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 (3.1)
s.a.:
S.f + g = d
|fij| ≤ (nij + nij0).fij-max
0 ≤ g ≤ gmax
0 ≤ nij ≤ nij-max
nij y nij0 Entero
fij Irrestricto
(i, j) ∈ Ω
En el sistema (3.1),ves la inversión debido a adicionar circuitos al sistema, cij es el
costo de adicionar un circuito en la rama i-j, Ω representa el conjunto de los corredores de
transmisión existentes en la red base y corredores de transmisión nuevos, S es la matriz
de incidencia nodo-rama del sistema eléctrico, f es el vector de flujos cuyos elementos
representan el flujo total en el camino i-j, g es el vector de generaciones nodales, d es el
vector de demandas nodales, fij-max es el flujo máximo permitido para un circuito en el
camino i-j, gmax es el vector de máxima generación nodal, nij es el número de circuitos
adicionados en la rama i-j, nij-max es el número máximo de circuitos que pueden ser
adicionados en la rama i-j, y nij0 es el número de existentes en la rama i-j en la
configuración base o inicial.
El primer conjunto de restricciones representa las ecuaciones que describen la
primera ley de Kirchhoff, una ecuación para cada barra del sistema; el segundo conjunto
de restricciones representa la restricción de capacidad de transmisión de los circuitos
(líneas y/o transformadores), el valor absoluto es necesario debido a que los flujos de
potencia pueden fluir en los dos sentidos. Las otras restricciones son triviales y
representan restricciones de límite de generación y de circuitos adicionados en cada
24
camino candidato i-j. Por último, las restricciones fij son irrestrictas en valor y las variables
nij deben ser enteras lo que representa la mayor fuente de complejidad en el problema.
En este modelo se tiene un problema de programación lineal entera mixta (PLEM), la
solución del problema (3.1) no es simple, especialmente para sistemas de gran
dimensión. Por el contrario, si fuesen permitidas adiciones fraccionarias de circuitos
(líneas de transmisión y/o transformadores), es decir, si se permite que los nij asuman
valores reales, entonces el sistema (3.1) se transforma en un simple problema de
programación lineal (PL) lo mismo ocurre con los sistemas de gran tamaño. De esta
forma, es evidente que la restricción nij entera produce la mayor complejidad en el
problema (3.1). Estas características serán aprovechadas para desarrollar varios tipos de
algoritmos para resolver el problema de planificación de sistema de transmisión cuando
es usado el modelo de transporte, algoritmos exactos como Branch and Bound,
enumeración implícita y los cortes de Benders (usado inicialmente para el modelo DC).
Sin embargo, si el problema de planeamiento es complejo puede requerirse de sistemas
sofisticados en manejo de memoria y amplio conocimiento en programación para resolver
el problema además de tener elevados esfuerzos computacionales en el proceso de
solución. El inconveniente más grande parte de la concepción de los métodos ya que en
estos se construyen bases de datos dinámicas que almacenan el camino que sigue el
algoritmo realizando procesos de enumeración. Este inconveniente puede apreciarse
mejor en la siguiente comparación: si un problema posee 64 variables binarias el número
de posibles soluciones del problema es 264, lo cual constituye una cantidad muy grande
de alternativas.
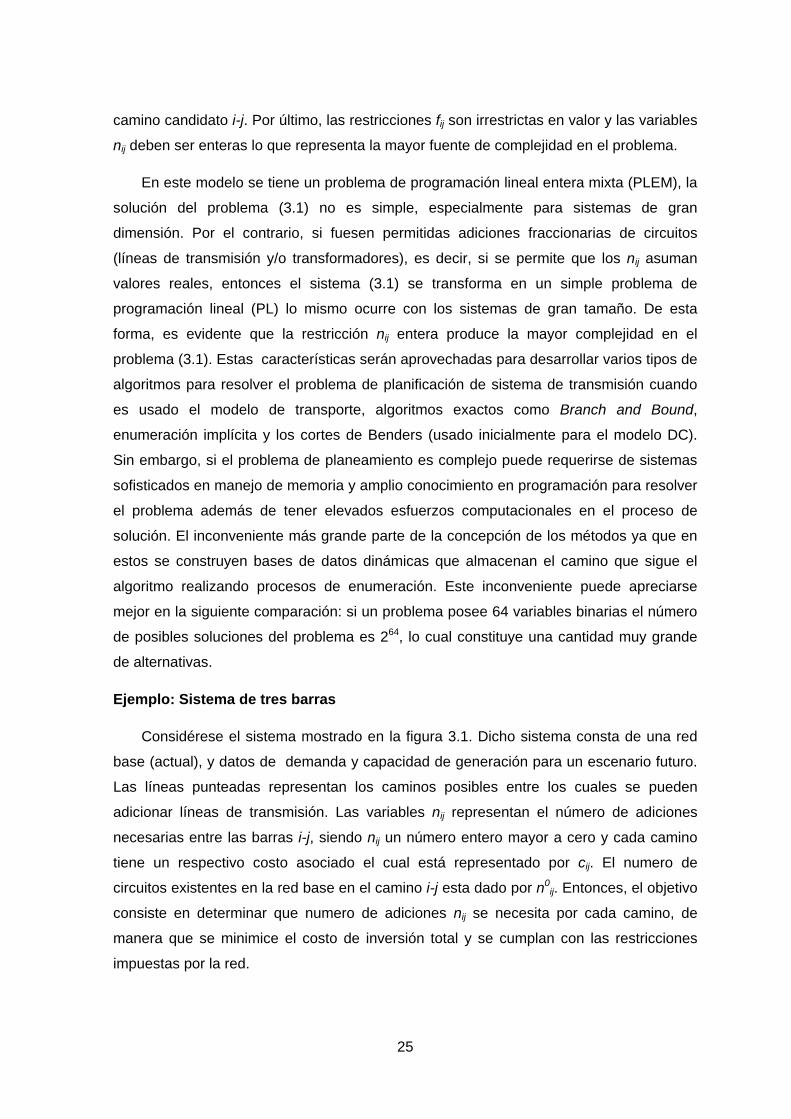
Ejemplo: Sistema de tres barras
Considérese el sistema mostrado en la figura 3.1. Dicho sistema consta de una red
base (actual), y datos de demanda y capacidad de generación para un escenario futuro.
Las líneas punteadas representan los caminos posibles entre los cuales se pueden
adicionar líneas de transmisión. Las variables nij representan el número de adiciones
necesarias entre las barras i-j, siendo nij un número entero mayor a cero y cada camino
tiene un respectivo costo asociado el cual está representado por cij. El numero de
circuitos existentes en la red base en el camino i-j esta dado por n0ij. Entonces, el objetivo
consiste en determinar que numero de adiciones nij se necesita por cada camino, de
manera que se minimice el costo de inversión total y se cumplan con las restricciones
impuestas por la red.
25

n12f12
f23
f13
n23
n13
1
2 3
g2 g3
g1
d3d2
d1
Figura 3.1 Representación del sistema de tres barras (Fuente: elaboración propia)
Luego, la función objetivo está dada por:
Minimizar c12.n12 + c13.n13 + c23.n23 Min.∑ 𝒄𝒊𝒋. 𝒏𝒊𝒋
Para modelar las restricciones de la red se utiliza las ecuaciones de la primera ley de
Kirchhoff del flujo de potencia mostrados en la siguiente figura 3.2:
nodo i
0=∑ if
Figura 3.2 Primera ley de Kirchhoff (Fuente: elaboración propia)
Las variables fij representan el flujo total por el camino i-j , considerando las líneas
existentes y las futuras adiciones. Luego, las restricciones de la primera Ley de Kirchhoff
en el sistema de tres nodos de la figura 3.1, quedan representadas por:
26

111312 dgff =+−−
221223 dgff =++−
331323 dgff =+++
=
+
−
−−
3
2
1
3
2
1
23
13
12
.110101
011
ddd
ggg
fff
Las ecuaciones se pueden representar por: S.f + g = d.
Donde: S es la matriz de incidencia nodo-rama del sistema eléctrico, f es el vector de
flujos cuyos elementos representan el flujo total en el camino i-j, g es el vector de
generaciones nodales yd es el vector de demandas nodales.
Como criterio de planificación, se adopta que el sistema no debe tener sobrecargas
en condiciones normales. Entonces, las restricciones de flujos están dadas por:
|f12| ≤ (n12 + n120).f12-max
|f13| ≤ (n13 + n130).f13-max
|f23| ≤ (n23 + n230).f23-max
Dichas ecuaciones se pueden representar por:|fij| ≤ (nij + nij0).fij-max
Donde, fij-max es el flujo máximo permitido para un circuito en el camino i-j, nij es el
número de circuitos adicionados en la rama i-j, y nij0 es el número de existentes en la
rama i-j en la configuración base o inicial. En el ejemplo n120 = n13
0 = 1 y n230 = 0.
Finalmente, se modelan las restricciones de capacidad de generación en cada barra
y el límite máximo de circuitos que pueden ser adicionados por cada rama i-j. Dichas
restricciones están dadas por:
0 ≤ g1 ≤ g1-max 0 ≤ g3 ≤ g3-max
0 ≤ g2 ≤ g2-max 0 ≤ n13 ≤ n13-max
0 ≤ g3 ≤ g3-max 0 ≤ n23 ≤ n23-max
Las ecuaciones se pueden representar por:
0 ≤ g ≤ gmax 0 ≤ nij ≤ nij-max
Donde, gmax es el vector de máxima generación nodal y nij-max es el número máximo
de circuitos que pueden ser adicionados en la rama i-j. En el ejemplo, n12=n13=2 y n23=1.
Finalmente, la formulación matemática del problema de la expansión del sistema
mostrado en la figura 3.1, queda según la siguiente ecuación:
27

Min. c12.n12 + c13.n13 + c23.n23 (3.2)
s.a.:
- f12 - f13 + g1 = d1
- f23 + f12 + g2 = d2
+ f23 + f13 + g3 = d3
|f12| ≤ (n12 + 1).f12-max
|f13| ≤ (n13 + 1).f13-max
|f23| ≤ (n23 + 0).f23-max
0 ≤ g1 ≤ g1-max
0 ≤ g2 ≤ g2-max
0 ≤ g3 ≤ g3-max
0 ≤ n12 ≤ 2
0 ≤ n13 ≤ 2
0 ≤ n23 ≤ 1
n12 ,n13 ,n23 Entero
f12,f13 , f23 Irrestricto
3.1.2 Modelo DC
El modelo DC es considerado ideal para trabajar en el problema de planeamiento de
la expansión de la red de transmisión. Su desempeño ha sido probado una y otra vez en
diferentes investigaciones reportadas en la literatura especializada [14, 16, 24, 62, 65].
Este modelo considera las dos leyes de Kirchhoff y representa un problema de PNLEM
de difícil solución, debido a la presencia de variables de tipo entero el cual representa el
número de circuitos adicionados en cada rama; y a la existencia de las restricciones
correspondiente a la segunda ley de Kirchhoff, que son no lineales. La formulación del
problema asume la siguiente forma:
Min. 𝑣 = ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 (3.3)
s.a.:
28

S.f + g = d
fij – Bij (θi – θj) (nij + nij0) = 0
|fij| ≤ (nij + nij0).fij-max
0 ≤ g ≤ gmax
0 ≤ nij ≤ nij-max
nij y nij0 Entero
fij Irrestricto
θj Irrestricto V j ∈ Ω0
(i, j) ∈ Ω
En el sistema (3.2), Bij es la susceptancia de un circuito en el corredor i−j, Ω0 es el
conjunto de barras y θj son los ángulos de fase de las barras que pertenecen a Ω0. Las
dos primeras restricciones del modelo representan la primera y segunda ley de Kirchhoff,
el conjunto restante de restricciones son operativas o de inversión: límites de flujo de
potencia por las líneas, límites en generación y límites de adición de circuitos.
Las experiencias ya realizadas con este modelo mostraron que las soluciones
encontradas suministran un buen desempeño cuando son evaluados con los modelos
tradicionales de operación de sistemas de energía eléctrica, como el flujo de carga AC.
Ejemplo: Sistema de tres barras de figura 3.1
Para la formulación del problema de la figura 3.1 en el modelo DC, se adiciona un
conjunto de restricciones asociadas a la segunda ley de Kirchhoff del flujo de potencia
mostrado en la figura 3.3. Las variables θi y θj representan los ángulos asociados a los
nodos i, j; y xij representa la reactancia correspondiente al ramal i-j.
i j
θi θj
ijjiij xf /)( θθ −=
xij
Figura 3.3 Segunda ley de Kirchhoff
29

(Fuente: elaboración propia)
Las restricciones de la segunda ley de Kirchhoff están dadas por:
f12 – x12 (θ1 – θ2) (n12 + n120) = 0
f13 – x13 (θ1 – θ3) (n13 + n130) = 0
f23 – x23 (θ2 – θ3) (n23 + n230) = 0
Pueden ser simplificada según:fij – Bij (θi – θj) (nij + nij0) = 0
Donde, Bij es la susceptancia de un circuito en el corredor i−j.
Finalmente, la formulación del problema según en el modelo DC queda según la
siguiente ecuación:
Min. c12.n12 + c13.n13 + c23.n23 (3.4)
s.a.:
- f12 - f13 + g1 = d1
- f23 + f12 + g2 = d2
+ f23 + f13 + g3 = d3
f12 – x12 (θ1 – θ2) (n12 + 1) = 0
f13 – x13 (θ1 – θ3) (n13 + 1) = 0
f23 – x23 (θ2 – θ3) (n23 + 0) = 0
|f12| ≤ (n12 + 1).f12-max
|f13| ≤ (n13 + 1).f13-max
|f23| ≤ (n23 + 0).f23-max
0 ≤ g1 ≤ g1-max
0 ≤ g2 ≤ g2-max
0 ≤ g3 ≤ g3-max
0 ≤ n12 ≤ 2
0 ≤ n13 ≤ 2
30

0 ≤ n23 ≤ 1
n12 ,n13 ,n23 Entero
f12,f13 , f23 Irrestricto
Otra representación muy útil para el modelo DC (después de algunas manipulaciones
algebraicas), se describe en la siguiente ecuación:
Min. 𝑣 = ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 (3.5)
s.a.:
B.θ + g = d
|Bij (θi – θj) (nij + nij0)| ≤ (nij + nij
0).fij-max
0 ≤ g ≤ gmax
0 ≤ nij ≤ nij-max
nij y nij0 Entero
fij Irrestricto
θj Irrestricto V j ∈ Ω0
(i, j) ∈ Ω
En el sistema (3.5), B es la matriz de susceptancias del sistema eléctrico y θ es el
vector de ángulos nodales.
3.1.3 Modelo híbrido no lineal
La representación del modelo híbrido propuesto originalmente en [84], tiene en
cuenta la aplicación de la primera ley de Kirchhoff en todos los nodos del sistema de
potencia, y la aplicación de la segunda ley de Kirchhoff solo en la topología base. Lo que
quiere decir, que dicho modelo es una combinación entre el modelo de transporte y el
modelo DC. La representación del modelo corresponde a un problema tipo PNLEM y
asume la siguiente forma:
Min. 𝑣 = ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 (3.6)
s.a.:
31
S.f + g = d
fij – Bij (θi – θj) (nij + nij0) = 0 V (i,j) ∈ Ω1
|fij| ≤ (nij + nij0).fij-max V (i,j) ∈ Ω2
0 ≤ g ≤ gmax
0 ≤ nij ≤ nij-max
nij y nij0 Entero
fij Irrestricto
θj Irrestricto V j ∈ Ω3
(i, j) ∈ Ω
En el sistema (3.6), Ω1 es el subconjunto de circuitos existentes en la configuración
base, Ω2 es el subconjunto de circuitos correspondientes a los nuevos caminos, Ω3 es el
subconjunto de barras que son parte de la configuración base; es decir, barras conexas
(no aisladas) y θj es el ángulo de fase de las barras que existen en la configuración base,
es decir, que pertenecen aΩ3.Ω es igual a Ω1U Ω2.
La idea de usar el modelo híbrido en el problema de planificación de sistemas de
transmisión es para superar algunos problemas que presentaba el modelo de transporte y
DC. El modelo de transporte tiene una excelente flexibilidad para trabajar con redes no
conexas, pero las soluciones pueden estar lejos de la solución óptima del modelo DC. De
esta manera, el modelo híbrido permite encontrar soluciones que estén próximas al
óptimo del modelo DC y con la ventaja de trabajar eficientemente en las partes no
conexas del sistema. Sin embargo, encontrar la solución óptima del problema de
planificación usando el modelo híbrido no lineal, definido anteriormente, es de una
complejidad casi equivalente a la del modelo DC. Debido a este hecho el modelo híbrido
no lineal no es usado de forma independiente en la solución de los problemas de
planificación, sino apenas para auxiliar en el proceso de solución del modelo DC. Sin
embargo, en la investigación se utiliza un modelo adicional, denominado híbrido lineal
continuo, que si puede ser utilizada de forma independiente para la solución del problema
y asume la siguiente forma:
Modelo hibrido lineal continuo:
32

Es denominado continuo debido a que en su forma básica [17], tiene la condición de
variable tipo entera para nij con sus respectivos límites. Al resolver el problema de
planeamiento de la expansión se determina el número de circuitos que deben adicionarse
a la red para solucionar el sistema. Debe observarse que al no exigir la condición de
entero para las variables nij, la solución puede entregar valores de adiciones fraccionarias
para varios corredores. La representación del modelo corresponde a un problema de
PLEM.
Min. 𝑣 = ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 (3.7)
s.a.:
S.f‘ +S0.f0 + g = d
fij0 – Bij.nij0.(θi – θj) = 0 V (i,j) ∈ Ω1
|fij0| ≤ nij0.fij-max V (i,j) ∈ Ω1
|f‘ij| ≤ nij .fij-max V (i,j) ∈ Ω
0 ≤ g ≤ gmax
0 ≤ nij ≤ nij-max
fij Irrestricto
θj Irrestricto V j ∈ Ω3
(i, j) ∈ Ω
En el sistema (3.7), S0 es la matriz de incidencia nodo-rama del sistema existente en
la configuración base, f0 es el vector de flujos en los circuitos existentes en la
configuración base, f′ es el vector de flujos en los corredores artificiales formado por los
elementos f′ijy f′ij es el flujo de potencia a través del circuito artificial en el corredor i − j.
3.1.4 Modelo básico considerando generación ficticia
Para el desarrollo de algunas técnicas en el planeamiento de la expansión de la
transmisión existen modificaciones efectuadas al modelo básico. La modificación más
común es la inclusión de generadores artificiales o generadores ficticios que se adicionan
al sistema original, en todos los nodos donde existe carga, con el propósito de suplir esta
demanda en los casos en que la red de transmisión no tiene capacidad suficiente para
transportar la potencia hacia dichos nodos o redes no conexas en caso de nodos futuros.
33

Esta técnica es equivalente a simular los cortes de carga necesarios para lograr la
factibilidad del sistema, con esto facilita la solución del problema en los casos en que la
red propuesta es insuficiente, y al mismo tiempo permite determinar la potencia no
suministrada (PNS). Estos generadores ficticios no operan cuando la red existente tiene
capacidad suficiente, ya que su inclusión incrementaría el costo de la solución obtenida y
el proceso de optimización los elimina automáticamente.
En los modelos de transporte, DC e híbrido modificados descritos en las ecuaciones
(3.8), (3.9) y (3.10) respectivamente, r es el vector de generadores artificiales, α es un
parámetro de penalización asociado a la potencia no servida y Ω4 es el subconjunto de
nodos de carga.
Modelo de transportes con generación ficticia:
Min. 𝑣 = ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 + 𝛼 ∑ 𝑟𝑖𝑖∈𝛺4 (3.8)
s.a.:
S.f + g + r = d
|fij| ≤ (nij + nij0).fij-max
0 ≤ r ≤d
0 ≤ g ≤ gmax
0 ≤ nij ≤ nij-max
nij y nij0 Entero
fij Irrestricto
(i, j) ∈ Ω
Modelo DC con generación ficticia:
Min. 𝑣 = ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 + 𝛼 ∑ 𝑟𝑖𝑖∈𝛺4 (3.9)
s.a.:
S.f + g + r = d
fij – Bij (θi – θj) (nij + nij0) = 0
0 ≤ r ≤d
34

|fij| ≤ (nij + nij0).fij-max
0 ≤ g ≤ gmax
0 ≤ nij ≤ nij-max
0 ≤ r ≤ d
nij y nij0 Entero
fij Irrestricto
θj Irrestricto V j ∈ Ω0
(i, j) ∈ Ω
Modelo hibrido no líneal con generación ficticia:
Min. 𝑣 = ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 + 𝛼 ∑ 𝑟𝑖𝑖∈𝛺4 (3.10)
s.a.:
S.f + g + r = d
fij – Bij (θi – θj) (nij + nij0) = 0 V (i,j) ∈ Ω1
|fij| ≤ (nij + nij0).fij-max V (i,j) ∈ Ω2
0 ≤ r ≤d
0 ≤ g ≤ gmax
0 ≤ nij ≤ nij-max
nij y nij0 Entero
fij Irrestricto
θj Irrestricto V j ∈ Ω3
(i, j) ∈ Ω
En todos los casos, el segundo término de la función objetivo penaliza la potencia no
suministrada por el sistema (una medida de racionamiento) a los nodos de carga
haciendo poco atractivas propuestas de inversión con valores de ri diferentes de cero en
el proceso de optimización [64]. Al incluir las variables ri se obtiene un problema de mayor
tamaño pero es muy conveniente usarlas cuando se usan algoritmos aproximados como
35

simulated annealing [64], algoritmos genéticos [24, 65], búsqueda tabú [23, 24], GRASP
[23] entre otros, para construir propuestas de inversión del problema de planeamiento, las
cuales desde el punto de vista matemático siempre van a ser factibles.
3.1.5 Modelo lineal disyuntivo
El modelo lineal disyuntivo, al igual que el modelo DC, sirve para caracterizar el
comportamiento de la red de transmisión en el problema de planeamiento de la
expansión. Un aspecto importante de este modelo es que presenta la misma solución
óptima del modelo DC, a través de un sistema equivalente que linealiza el modelo DC
convencional. El modelo está representado por el sistema (3.11):
Min. 𝑣 = ∑ ∑ 𝑐𝑖𝑗 . 𝑦𝑖𝑗,𝑘𝑘∈𝛺2 + 𝛼 ∑ 𝑟𝑖𝑖∈𝛺0(𝑖,𝑗)∈𝛺=𝛺1∪𝛺2 (3.11)
s.a.:
S0.f0 + S1.f1 + g + r = d
fij0 – Bij0.nij
0.(θi – θj) = 0 V (i,j) ∈ Ω1
fij,k1-Bij,k1.(θi – θj)≤ M.(1 – yij,k)
fij,k1-Bij,k1.(θi – θj)≥ -M.(1 – yij,k)
0 ≤ g ≤ gmax
0 ≤ r ≤ d
yij∈ {0, 1} ∀(i, j) ∈Ω2
fij0 , fij1 , i, gi, ri Irrestricto
(i, j) ∈ Ω
En el sistema (3.11), M es un parámetro con un valor muy grande, incluido en el
proceso de linealización; Ω representa el conjunto de los corredores de transmisión
existentes en la red base y corredores de transmisión nuevos,Ω0 es el conjunto de nodos
de carga, Ω1 es el conjunto de circuitos existentes en la red base, Ω2 representa el
número de circuitos posibles en cada corredor; yij,k es una variable binaria que representa
la adición de un circuito en la posición k del corredor i − j, con valor ”1” en el caso de
adición y ”0” en el caso contrario; S0 es la matriz de incidencia nodo-rama de los circuitos
existentes en la configuración base con flujos f0 y S1 es la matriz de incidencia de ramas
36

de los circuitos candidatos considerados como variables binarias y con flujos f1.Se deben
hacer las siguientes aclaraciones en el modelo:
• La restricciónS0f0 +S1f1 + g + r = d, representa de manera compacta a todas las
restricciones asociadas a la primera ley de Kirchhoff, cuando ésta se aplica a los n0
nodos del sistema. Todas son restricciones lineales de igualdad.
• La restricción fij0 – Bij0nij
0 .(θi – θj) = 0 representa la segunda ley de Kirchhoff aplicada
a los nij0 circuitos existentes en el corredor i-j de la red actual. En esta expresión Bij
0
representa la suceptancia de un circuito que hace parte del camino i-j y se asume
que todos los circuitos tienen la misma reactancia y la misma capacidad. S0 es la
matriz de incidencia nodo-rama de los circuitos existentes en la configuración base.
• El grupo de restricciones|fij,k1- Bij,k1.(θi – θj)| ≤ M.(1 – yij,k), representan la segunda ley
de Kirchhoff para cada circuito candidato que ha sido seleccionado para adición. Es
decir, si el elemento yij,k asume el valor 1. Si el elemento yij,k no es seleccionado para
adición, entonces yij,k = 0 y no se aplica la segunda ley de Kirchhoff.
Una descripción más detallada del modelo lineal disyuntivo se encuentra en [17].
3.1.6 Modelo AC
El modelo AC es una generalización del flujo de potencia AC [49], siendo la red de
transmisión representada por las dos leyes de Kirchhoff no lineales. Este modelo es el
más apropiado para los estudios de planeamiento de la expansión de la transmisión de
corto y mediano plazo (PETCP); sin embargo, aún es poco utilizado en la literatura
especializada. El modelo AC propuesto en [59] asume la siguiente forma:
Min. 𝑣 = ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗 + 𝛼 ∑ 𝑐𝑖 . 𝑞𝑐𝑖𝑖∈𝛺𝑐(𝑖,𝑗)∈𝛺1 (3.12)
s.a.:
P(V,θ,n) – Pg + Pd = 0
Q(V,θ,n,qc) – Qg + Qd = 0
Si.(V,θ,n,qc) ≤ Smax
Sj.(V,θ,n,qc) ≤ Smax
Vmin ≤ V ≤ Vmax
Pg-min ≤ P ≤ Pg-max
37

Qg-min ≤ Q ≤ Qg-max
0 ≤ nij ≤ nij-max
0 ≤ qc ≤ qc-max
nij , qc Entero
En el sistema (3.7), cij es el costo de adicionar un circuito en la rama i-j,nij es el
número de circuitos adicionados en la rama i-j, qcies la cantidad de MVAr adicionado en la
barra i, cies el costo de la adición de 1 MVAr en la barra i, Ω1 es el conjunto de circuitos
nuevos y/o refuerzos, Ωc es el conjunto de barras para compensación reactiva, Ves el
vector de las magnitudes de las tensiones nodales, P es el vector de potencia activa
líquida inyectada en los nodos, Q es el vector de potencia reactiva líquida inyectada en
los nodos, Pd es el vector de potencia activa de las cargas, Pg es el vector de potencia
activa de los generadores, Qd es el vector de potencia reactiva de las cargas, Qg es el
vector de potencia reactiva de los generadores, S es el vector de potencia aparente en
las ramas; Vmax, Pg-max, Qg-max y qc-max, corresponden a los valores máximos de dichas
variables y Pg-min y Qg-min corresponden a los valores mínimos de dichas variables.
Este modelo es un problema PNLEM de elevada complejidad. En este modelo, la
función objetivo tiene dos partes. La primera corresponde al costo de inversión
decurrente de la adición de las líneas de transmisión. La segunda corresponde al costo
de inversión decurrente de la adición de la compensación reactiva. Entre las restricciones
tenemos las ecuaciones convencionales del flujo de potencia AC (ecuación 3.7,
restricción 1° y 2°), equivalentes a las dos leyes de Kirchhoff no lineales. Entre las
restricciones tenemos también los límites operaciones de sobrecarga en las líneas
(ecuación 3.7, restricción 3° y 4°), de tensiones en las barras (ecuación 3.7, restricción 5°)
y de potencia generada en los generadores (ecuación 3.7, restricción 6° y 7°). En esta
formulación se tienen variables continuas de operación tales como las tensiones en las
barras, los flujos en los circuitos, etc., y variables de inversión tales como la cantidad de
nuevos circuitos y de nuevos bancos de capacitores.
La principal ventaja de este modelo (en comparación con el modelo DC) es que los
resultados obtenidos son más realistas y menos propensos a futuras correcciones,
debido a una mejor representación de las ecuaciones de flujo de potencia. Otra ventaja
importante del modelo descrito en [59], es la realización simultánea de la adición de
nuevos circuitos y de la compensación reactiva en el sistema. La utilización de este
modelo permite también la determinación exacta de las pérdidas activas en el sistema. La
38

principal limitación de este modelo está en el hecho de no considerar un aspecto
importante en la planificación de la expansión de corto plazo: la operación en régimen
permanente del sistema ante contingencias (típicamente evaluados con un programa de
flujo de potencia). Otra limitación importante es que no considera la evolución de las
inversiones en el tiempo, ya que el horizonte de estudio sólo considera un periodo de
tiempo (planificación multietapa y/o dinámica).
Hasta la actualidad, no existen muchas técnicas de optimización propuestas en la
literatura especializada para resolver la formulación del modelo presentado. Sin embargo,
se reconoce que metodologías utilizadas para resolver el modelo DC podrían ser
adaptadas para resolver el modelo AC [63].
3.2 Técnicas de solución
De las principales contribuciones de la literatura especializada [17], se pueden
clasificar en técnicas basadas en algoritmos heurísticos constructivos, técnicas basadas
en algoritmos de optimización clásica y técnicas que poseen características de ambos
grupos, denominados metaheurísticas.
3.2.1 Algoritmos heurísticos constructivos
Son procedimientos paso a paso guiados por un indicador de sensibilidad hasta
encontrar una solución (propuesta de expansión del sistema eléctrico). Quedan atrapados
fácilmente en óptimos locales y no poseen mecanismos para escapar de estos óptimos
locales; sin embargo, permiten construir propuestas de muy buena calidad para resolver
el problema de planeamiento sin ser necesariamente la óptima. Estos algoritmos sirven
de base para guiar otro tipo de metodologías como las metaheurísticas, que poseen
mecanismos para escapar de óptimos locales, permitiéndoles que exploren en espacios
discretos reducidos que contienen soluciones de mejor calidad sin renunciar a encontrar
el óptimo global. Los principales algoritmos heurísticos desarrollados son: El algoritmo de
Garver que utiliza el modelo de transportes, los algoritmos de mínimo esfuerzo y mínimo
corte de carga que utilizan el modelo DC; y los algoritmos Villasana-Garver y red marginal
de Levi Calovic [38] entre otros que utilizan modelos mixtos (Híbridos).
Algoritmo de Garver
Esta es la primera propuesta que usa modelos de programación lineal (PL) para
resolver el problema de planeamiento [26]. Consiste en permitir que las variables nij de la
39

ecuación (3.1) sean continuas (valores reales) obteniendo un problema de PL según lo
descrito en la ecuación (3.13).
Min. 𝑣 = ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 (3.13)
s.a.:
S.f + g = d
|fij| ≤ (nij + nij0).fij-max
0 ≤ g ≤ gmax
0 ≤ nij ≤ nij-max
nij ,fij Real
(i, j) ∈Ω
Garver propone que la línea que conduce mayor flujo de potencia (mayor nij.fij-max)
obtenido después de resolver (3.8) se adicione al sistema de potencia. El proceso se
repite iterativamente hasta que la solución en (3.8) de todas las variables nij es cero.
Como se puede apreciar una de las grandes ventajas del algoritmo de Garver es la
simplicidad en la implementación computacional puesto que solo requiere de la solución
iterativa de problemas de programación lineal. En la práctica el algoritmo encuentra con
facilidad las configuraciones óptimas de sistemas pequeños, pero en sistemas de gran
tamaño esas configuraciones pueden estar bastante alejadas de la configuración óptima.
Algoritmo de mínimo esfuerzo
Utiliza el mismo principio de adición de un circuito en cada paso. La diferencia básica
está en el tipo de modelo utilizado (no tiene en cuenta restricciones de transmisión en los
elementos del sistema) y en el índice de sensibilidad que guía la construcción del plan de
expansión [50]. En cada paso se resuelve un problema de flujo de carga, solucionando el
siguiente problema:
Min. 𝑤 = 𝛼 ∑ 𝑟𝑖 (3.14)
s.a.:
B.θ + g = d
0 ≤ g ≤ gmax
40

0 ≤ r ≤ d
θj Irrestricto
(i, j) ∈ Ω
Luego de evaluar (3.14) se observan los flujos de potencia en todos los enlaces de
transmisión. Si existe sobrecarga en el sistema, se calculan los indicadores de
sensibilidad de mínimo esfuerzo (ISijme). El indicador de sensibilidad también puede incluir
el costo del circuito; es decir:
𝐼𝑆𝑖𝑗𝑚𝑒 = −
12
�𝜃𝑖 − 𝜃𝑗�2𝐵𝑖𝑗 𝐼𝑆𝑖𝑗𝑚𝑒 = −
12
�𝜃𝑖 − 𝜃𝑗�2𝐵𝑖𝑗/𝑐𝑖𝑗
El circuito de mayor medida de sensibilidad se adiciona al sistema y el proceso se
repite hasta que desaparecen las sobrecargas en el sistema de transmisión. El gran
problema que se presenta en la implementación del algoritmo, es que si existen nodos
aislados (inconexos),el modelo matemático no tiene solución debido a que el índice de
sensibilidad propuesto requiere los valores de θ en todos los nodos. Esta dificultad se
supera si se considera una red ficticia que une nodos inconexos con valores de
suceptancias muy bajas (usualmente: nij = 0.001).
Algoritmo de mínimo corte de carga
La sobrecarga permitida en el algoritmo de mínimo esfuerzo para solucionar los
problemas de operación del sistema, pierde validez en el algoritmo de mínimo corte de
carta; en lugar de esto, el problema de convergencia se soluciona permitiendo
racionamientos. En otras palabras, se admiten cortes de carga representados en
generadores artificiales.
Como en los anteriores algoritmos, en este se adiciona un circuito en cada paso con
la guía de un indicador de sensibilidad. El proceso termina cuando las adiciones hechas
satisfacen el sistema de tal forma que no se presenta corte de carga. Respecto a la
formulación anterior (3.14), en este caso se adiciona una restricción que limita el flujo en
los circuitos manteniéndolo dentro de sus límites de operación.
Min. 𝑤 = 𝛼 ∑ 𝑟𝑖 (3.15)
s.a.:
B.θ + g = d
41
|θi – θj| ≤ fij-max/ Bij
0 ≤ g ≤ gmax
0 ≤ r ≤ d
θj Irrestricto
(i, j) ∈ Ω
El indicador de sensibilidad (ISijmc) es obtenido de la siguiente expresión (al igual que
el caso anterior, también puede incluir el costo):
𝐼𝑆𝑖𝑗𝑚𝑒 = −�𝜃𝑖 − 𝜃𝑗��𝜋𝑖 − 𝜋𝑗� 𝐼𝑆𝑖𝑗
𝑚𝑒 = −�𝜃𝑖 − 𝜃𝑗��𝜋𝑖 − 𝜋𝑗�/𝑐𝑖𝑗
Las variables πi y πj, son variables duales asociadas a la restricción B.θ+g+r=d.
El circuito de mayor medida de sensibilidad se adiciona al sistema y el proceso se
repite hasta que desaparece el racionamiento en el sistema. Ante la presencia de nodos
aislados (mismo problema que el método de mínimo esfuerzo), se procede con una
solución similar (red ficticia con nij = 0.001).
Algoritmo de Garver-Villanasa-Salon
La propuesta de Villasana-Garver-Salon consiste básicamente en utilizar el modelo
híbrido lineal dentro de un algoritmo heurístico constructivo. En cada paso del algoritmo
se resuelve la formulación (3.7) hasta encontrar una solución que también es factible para
el modelo DC (debido a que los circuitos adicionados cumplen las dos leyes de Kirchhoff)
[84]. Como todo algoritmo heurístico constructivo el índice de sensibilidad “nij.fij-max“ es
calculado utilizando la solución del modelo híbrido lineal.
3.2.2 Algoritmos de optimización clásica
Uno de los modelos de mayor aceptación para resolver el problema del planeamiento
de la expansión en sistemas eléctricos de transmisión es el modelo DC; sin embargo,
resolver este problema en sistemas de mediano y gran tamaño envuelve una gran
complejidad matemática, lo que ha impulsado a los investigadores en todo el mundo a
encontrar metodologías adecuadas que resuelvan el modelo, que es en esencia, un
problema de programación no lineal entero mixto.
Bajo esta óptica, uno de los primeros métodos propuestos fue la descomposición de
Benders [28, 67]; posteriormente, manifestó relevancia en la solución del problema el
42

algoritmo de Branch and Bound [30, 31, 53]. Estos algoritmos tienen la ventaja de poder
encontrar el óptimo global y todas las soluciones del problema de expansión y son
eficientes en la solución de problemas de pequeño y mediano tamaño, y que
adicionalmente no presentan una formulación matemática sofisticada; sin embargo, para
problemas de gran tamaño con variables de naturaleza real y entera, presentan
problemas de convergencia debido al elevado esfuerzo computacional.
Algoritmo de Descomposición de Benders
En [28] y [67] se exponen aplicaciones relacionadas con la utilización de la
descomposición de Benders para el problema de planeamiento de la expansión de
sistemas de transmisión, el cual divide el problema en dos subproblemas: un
subproblema de inversión, en la que se determina el costo de inversión asociado con la
adición de uno o más elementos; y un subproblema de operación, que es un
complemento y determina las condiciones bajo las cuales opera el sistema. En otros
términos, en el subproblema de operación, se determinan los elementos necesarios para
que el sistema opere bajo condiciones normales y en el caso de presentarse una
necesidad o una violación de alguna de las restricciones, se envía esa necesidad al
subproblema de inversión, quien es el que toma la decisión de qué elementos se deben
adicionar a la topología base. Una vez se encuentra la nueva configuración, esta se le
informa al problema de operación, quien evalúa las condiciones de operación y determina
la necesidad de nuevos elementos.
El método de descomposición de Benders y sus posteriores modificaciones,
encontraron las soluciones óptimas para sistemas como Garver de 6 nodos y 15 líneas y
el sistema Sur brasilero de 46 nodos y 79 líneas, sin embargo, para problemas grandes
como el sistema eléctrico colombiano 2012 de 93 nodos y 155 líneas y el sistema Norte-
Nordeste brasilero, de 87 nodos y 183 líneas, el sistema no converge al generar gran
cantidad de cortes que dificultan el procesamiento y almacenamiento de los datos [27].
Algoritmo de Branch and Bound
Este algoritmo permite encontrar la solución óptima de un problema lineal con
variables enteras (PLE) o variables enteras y continuas (PLEM). Consiste en resolver un
conjunto de problemas de programación lineal (PL) que son versiones menos complejas
del PLEM [30]. Inicialmente se resuelve el problema original permitiendo que las variables
enteras adquieran valores continuos (problema P0); si P0 tiene solución entera en todas
las variables enteras entonces se obtiene la solución óptima global. Si el problema no
43

presenta solución entera, se debe dividir el problema en dos subproblemas escogiendo
una variable con valor actual no entero para dividir, de la siguiente manera:
Subproblema P1: Es el problema P0 más una restricción de la forma nij ≤ [nij]
Subproblema P2: Es el problema P0 más una restricción de la forma nij ≥ [nij]
Siendo nij el mayor entero contenido en la variable nij que se divide. Estos
subproblemas se deben resolver al igual que P0 y repetir el proceso hasta que el espacio
de soluciones se cubra totalmente. Para tratar de evitar expandir de manera exponencial
la cantidad de opciones que se analizan al generar subproblemas de PL se siguen unas
reglas para cortar las ramas que se van obteniendo; efectuadas cuando el subproblema:
1) tiene solución entera, 2) no tiene solución entera pero presenta una solución de peor
calidad que otra solución entera ya encontrada y 3) cuando la solución es infactible.
Inicialmente se cuenta con una herramienta que explora el espacio discreto de
soluciones de una manera exhaustiva lo cual garantiza que se obtiene la solución óptima
al finalizar el proceso. Sin embargo, en problemas de gran complejidad matemática el
almacenamiento de la información de los subproblemas de PL puede alcanzar niveles
prohibidos además de incrementar el esfuerzo computacional considerablemente, pues la
solución de un subproblema involucra aplicar algoritmos de PL con bases muy grandes
que poseen matrices de gran tamaño que se deben invertir en cada pivotaje.
Existen otras metodologías con las cuales resolver problemas PLEM, entre las
cuales se puede nombrar el método de cortes de Gomory [3]. Trabajos como [30, 31]
desarrollan este algoritmo utilizando el modelo de transportes; asimismo, en [53], se
utiliza el modelo lineal disyuntivo. En términos generales, no logran resolver el problema
en sistemas de alta complejidad.
3.2.3 Algoritmos metaheuristicos
Surgen debido a la gran dificultad en la obtención de soluciones en sistemas de alta
complejidad. A causa de esta gran dificultad se abre el campo de investigación hacia
métodos de búsqueda de soluciones de muy alta calidad, tal vez muy cercanas a la
solución óptima, usando métodos de optimización combinatorial. La ventaja de estos
métodos radica en que, aunque no garantizan la obtención de la solución óptima del
problema, el esfuerzo computacional que se requiere para hallar soluciones de muy alta
calidad es bajo ya que combinan exploración con explotación del espacio discreto del
44

problema de optimización, evolucionando con base en reglas tomadas de procesos que
funcionan en la naturaleza.
Los algoritmos metaheurísticos se caracterizan por ser algoritmos aproximados de
optimización que realizan una búsqueda “inteligente”, tomando decisiones basándose en
la emulación de procesos de la naturaleza para explorar el espacio de soluciones. Su
aplicación en la planificación de sistemas de transmisión se inicia a partir de la década de
los noventa. En esta categoría se encuentran: los algoritmos génicos, la búsqueda tabú,
GRASP, simulated annealing, etc. Estos algoritmos demostraron que puede encontrar
soluciones óptimas o casi óptimas para muchos tipos de problemas complejos del campo
de la investigación de operaciones. Para el problema de planificación de la expansión de
la transmisión estos algoritmos encontraron soluciones óptimas en sistemas de pequeño
tamaño y soluciones casi óptimas para sistemas de gran tamaño. Actualmente, se está
estudiando intensivamente el algoritmo particle swarm optimization (PSO).
3.3 Técnicas para el análisis de riesgos económicos y toma de decisiones ante incertidumbres
Como se mencionó en el capítulo anterior, la planificación de la expansión de la
transmisión en el largo plazo está sujeta a grandes incertidumbres propias del sistema,
para afrontar dicho problema, existen diversos métodos de toma de decisiones para
mitigar el riesgo mediante los cuales es posible encontrar una solución robusta. Entre las
técnicas se pueden encontrar: la técnica de compromiso/riesgo (trade-off/risk), la técnica
de costo esperado, la técnica de costo de oportunidad máximo y la técnica Hurvicz, entre
otros. A continuación se describe cada una ellas y se desarrollan ejemplos prácticos.
3.3.1 Técnica compromiso/riesgo (trade-off/risk)
La técnica compromiso/riesgo (trade-off/risk), es aplicable cuando en el proceso de
decisión en la planificación existen diversos objetivos que pueden estar en conflicto y no
es posible identificar un único plan que optimice simultáneamente todos los objetivos, por
tanto se intenta buscar la solución más robusta que cumpla en la mejor manera posible
con todos los objetivos, pero que puede que no sea el mejor en la mayoría de ellos. El
análisis trade-off o de compromiso entre objetivos de cada escenario, encuentra el plan
más robusto y/o flexible; de no conseguirlo, se procede con el análisis risk o de riesgo.
Esta técnica de selección se muestra como un método sencillo de aplicar, que no
requiere del proceso de optimización matemática para encontrar planes de expansión
óptimos, el cual es su principal ventaja. Sin embargo entre sus principales desventajas
45

están el tener que evaluar un gran número de planes para poder identificar el plan que
domine al resto; y que al contar con planes definidos sin criterios de óptimalidad alguno,
se seleccione un plan no óptimo. El método trade-off/risk toma en cuenta las siguientes
definiciones para su aplicación:
• Opción: es una alternativa que se puede optar y especificar: Por ejemplo, para el
caso de la subtransmisión, algunas opciones pueden ser: la capacidad de inyección
en los “nodos de interconexión”, ubicación de los futuros “nodos de interconexión” y
los posibles enlaces entre subestaciones.
• Plan: es un conjunto de opciones específicas que definen un proyecto sobre el cual
se puede tomar una decisión. Por ejemplo, para el caso de la subtransmisión, un
plan puede contemplar una alternativa de inyección y el desarrollo de la red
correspondiente considerando conductores de alta temperatura en las redes
existentes.
• Incertidumbre: Es una variable sobre la cual no se tiene control y que generalmente
está relacionada con factores exógenos. Por ejemplo, las proyecciones de demanda,
variaciones de precios en los cables subterráneos y conductores de alta temperatura,
el costo de las compensaciones, el factor de carga, entre otros.
• Futuro: Es un conjunto de resultados o realizaciones de todas las incertidumbres. Por
ejemplo, 3% de crecimiento de la demanda y una caída de 10% en el precio de
cables subterráneos con uso de conductores de alta temperatura para el caso de
instalaciones existentes.
• Escenario: Es un conjunto completo de opciones e incertidumbres específicas, es
decir, es un plan particular combinado con un futuro específico.
• Atributos: Son medidas de la bondad de un plan de acuerdo con los objetivos
considerados, pueden ser cuantitativos o cualitativos. Los atributos pueden ser
minimizados o maximizados y miden si un plan es adecuado, a la luz de las
incertidumbres. Por ejemplo, los atributos pueden ser el costo de inversión, las
pérdidas y el costo de la energía no atendida.
• Lista corta o conjunto de decisión: Es un conjunto de planes atractivos que podrían
cumplir de la mejor manera con todos los objetivos considerados. Son planes que no
son dominados, en términos de atributos, y se encuentran cerca del codo de la curva
trade-off.
46

• Riesgo: Es una contingencia a la cual se está expuesta si se selecciona un plan en
vez de otro, debido a las incertidumbres. El riesgo tiene que ver con los atributos
pero aún más con las decisiones. Una medida del riesgo es la probabilidad que un
plan sea inferior a otro. También es medido en términos de exposición.
• Plan robusto y/o flexible: Es un plan que sería seleccionado en cada futuro sin
importar como se presenten las incertidumbres.
• Exposición: Es una medida del riesgo. Es una evaluación para la identificación de las
condiciones (futuros) por las cuales un plan no está en la lista corta y del grado de
arrepentimiento en caso de selección de dicho plan.
Formulación del Problema
La formulación del problema comprende en definir las opciones, identificación de las
incertidumbres y determinar los planes que serán medidos a través de atributos. En la
aplicación del método trade-off/risk, la selección de un número grande de planes
consistentes y/o relevantes es la clave para el éxito del análisis que se plantea.
Análisis Trade-Off
El análisis trade-off/risk usa los siguientes conjuntos de información: lista de planes,
lista de futuros, lista de escenarios y atributos para cada escenario. Una vez que se han
identificado las opciones e incertidumbres, estas son usadas para representar planes y
futuros discretos. Esto es realizado inicialmente tomando todas las combinaciones de las
realizaciones de las incertidumbres para desarrollar los futuros. En esta etapa es
necesaria la participación del evaluador para establecer planes y futuros razonables. Una
vez los planes y futuros han sido desarrollados, el evaluador combina cada plan con cada
futuro para crear escenarios. Los valores de los atributos para cada escenario, es decir,
la medida del rendimiento de cada plan bajo cada futuro, pueden ser obtenidos por
simulación. Estos objetivos, medidos en términos de atributos, pueden tener, en general,
cuatro tipos de relación.
Tipo A: Sin conflicto
Este tipo de relación se presenta cuando se encuentra un plan que optimiza a la vez
los dos atributos en evaluación. Si hay otros atributos a evaluar, uno de los dos puede ser
descartado, simplificando el análisis trade-off [08].
47

Figura 3.4 Análisis Trade-Off – Relación Tipo A (Fuente: referencia [08])
Tipo B: Con compromisos atractivos
Este tipo de relación se presenta cuando no se encuentra un plan que optimice a la
vez los dos atributos en evaluación. Sin embargo, se presentan una serie de planes que
en cierto sentido son óptimos (se ubican en la curva trade-off), ya que dominan a los
planes al interior de esta curva, en términos de ambos atributos [08].
Figura 3.5 Análisis Trade-Off – Relación Tipo B (Fuente: referencia [08])
Los planes cerca del codo de la curva trade-off conforman una lista corta de planes
atractivos, es decir, son los mejores planes teniendo en cuenta ambos atributos.
Tipo C: Sin compromisos atractivos
48
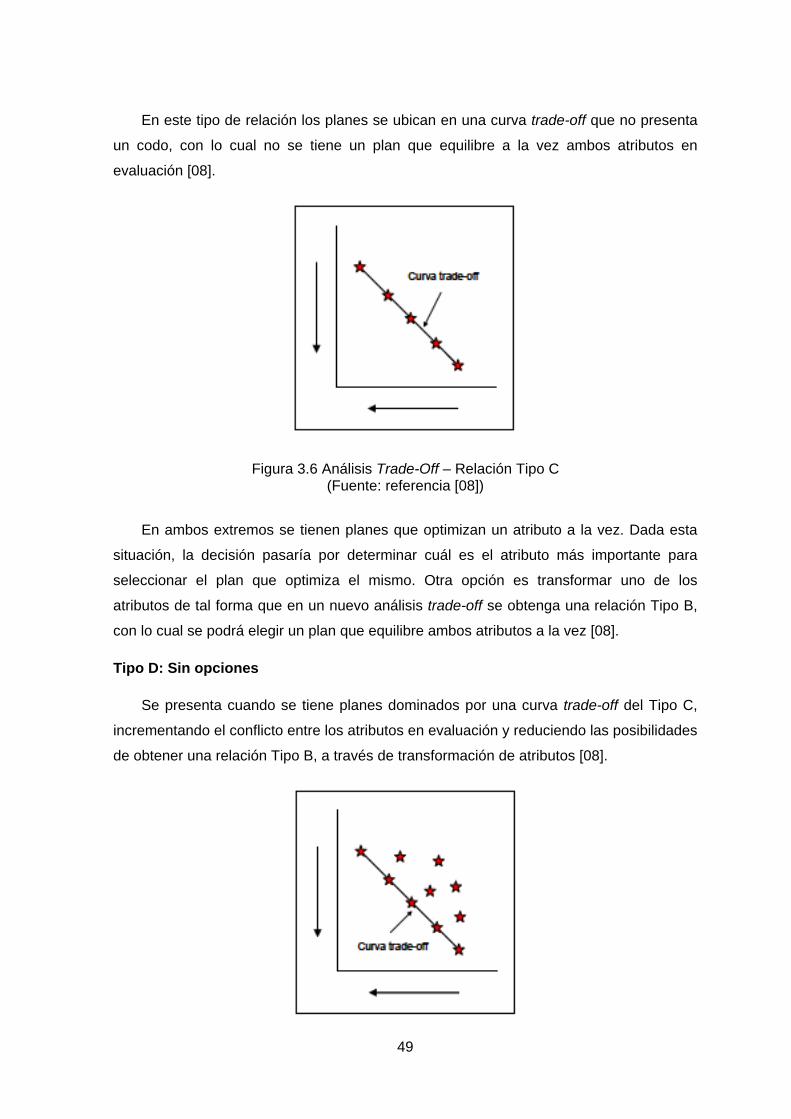
En este tipo de relación los planes se ubican en una curva trade-off que no presenta
un codo, con lo cual no se tiene un plan que equilibre a la vez ambos atributos en
evaluación [08].
Figura 3.6 Análisis Trade-Off – Relación Tipo C (Fuente: referencia [08])
En ambos extremos se tienen planes que optimizan un atributo a la vez. Dada esta
situación, la decisión pasaría por determinar cuál es el atributo más importante para
seleccionar el plan que optimiza el mismo. Otra opción es transformar uno de los
atributos de tal forma que en un nuevo análisis trade-off se obtenga una relación Tipo B,
con lo cual se podrá elegir un plan que equilibre ambos atributos a la vez [08].
Tipo D: Sin opciones
Se presenta cuando se tiene planes dominados por una curva trade-off del Tipo C,
incrementando el conflicto entre los atributos en evaluación y reduciendo las posibilidades
de obtener una relación Tipo B, a través de transformación de atributos [08].
49

Figura 3.7 Análisis Trade-Off – Relación Tipo D (Fuente: referencia [08])
Aplicación:
En la Figura 3.8 se presenta gráficamente la evaluación de dos atributos en tres
escenarios (caso de minimización de atributos). Como se aprecia, la alternativa A es
robusta debido a que se encuentra en el codo de la curva trade-off para todos los
escenarios [08].
Figura 3.8 Evaluación de Atributos con el Método Trade-Off/Risk (Fuente: referencia [08])
La curva trade-off se construye de las opciones dominantes, es decir, de aquellas
que son mejores al resto en por lo menos un atributo. Por ejemplo, en la Figura 3.8, la
alternativa B domina a la alternativa C en el atributo 1 mientras que la alternativa A
domina a la alternativa C en ambos atributos [08].
La curva trade-off representa la relación existente entre los atributos evaluados. En el
codo de la curva se ubica la alternativa más robusta y/o las alternativas que son factibles
de seleccionar (aquellas cercanas al codo). De no encontrar una solución robusta, se
procede con el análisis de riesgo o análisis risk de las alternativas más interesantes
ubicadas cercanas al codo de la curva trade-off [08].
Análisis Risk
50

El análisis “risk” utiliza el método “minimax”, el cual minimiza el máximo
arrepentimiento. La aplicación consta de las siguientes etapas:
• A partir de una matriz de decisión se construye la matriz de pérdidas, la cual muestra
para cada escenario (en columna) la diferencia en valor asociado, de cada
estrategia, con respecto a la mejor.
• Luego se determina cual es el peor escenario, en estos términos, para cada
estrategia.
• Por último se elige como estrategia óptima la de menor pérdida relativa en el peor de
los casos.
3.3.2 Técnica de costo esperado
La técnica de costo esperado consiste en definir probabilidades de ocurrencia para
cada escenario evaluado, y se selecciona a la alternativa con “menor costo ponderado”.
La deficiencia de este método incide en la definición de variables probabilísticas las
cuales generalmente son subjetivas. En el ejemplo mostrado a continuación se explica
brevemente la metodología [57]:
Tabla 3.1 Ejemplo de técnica costo esperado (Fuente: referencia [57])
En este ejemplo se tienen cinco escenarios para los cuales se han encontrado cinco
planes de expansión o soluciones, considerando una probabilidad de ocurrencia de cada
escenario y evaluando el costo de operación e inversión de cada solución sobre cada
escenario, se evalúa el costo esperado de cada plan de expansión. En ellos se puede
observar que si bien el plan S1 es la mejor solución para el escenario E1, no es tan
bueno en el conjunto de escenarios [57].
En el ejemplo se muestra que el plan S2 es la mejor alternativa para el conjunto de
escenarios, seguido del plan S3, siendo el último plan el S4.
MejorSolución S1 S2 S3 S4 S5
E1 S1 100 0.2 100 108 115 142 121E2 S2 80 0.3 120 80 93 137 118E3 S3 90 0.05 115 112 90 138 132E4 S4 130 0.18 142 145 138 130 133E5 S5 110 0.27 117 123 118 139 110
CM 118.9 110.51 112.1 137.33 119.84
Planes de expansiónProbabilidadEscenario
51

3.3.3 Técnica de costo de oportunidad máximo
La técnica de costo de oportunidad máximo selecciona la solución de menor “máxima
pérdida económica” de cada plan de expansión ante la ocurrencia de cualquier escenario
evaluado. Esta técnica de selección resulta ser de gran simplicidad y factible de
aplicación en la búsqueda de un plan de expansión robusto. Los pasos seguidos son los
siguientes [57]:
• Evaluar los planes de expansión sobre todos los escenarios posibles.
• Evaluar la pérdida económica de cada plan, para ello se considera que la pérdida es
el sobre-costo de haber optado por dicho plan y no por el plan de menor costo sobre
el escenario analizado.
• Identificar la máxima pérdida económica posible de cada plan de expansión.
• Identificar el plan de expansión de menor riesgo económico, el cual corresponde al
que obtenga la menor máxima pérdida económica.
Siguiendo el ejemplo anterior y aplicando los criterios explicados se obtienen los
siguientes resultados [57]:
Tabla 3.2 Ejemplo de técnica costo oportunidad máximo (Fuente: referencia [57])
Se pude observar que para el ejemplo, el plan S3 obtiene un máximo riesgo de 15
ante la ocurrencia del escenario E1, sin embargo es el plan que tiene el menor máximo
riesgo de todos los planes y por tanto el seleccionado.
3.3.4 Técnica Hurvics
La técnica Hurvicz plantea que cada plan de expansión puede llevar a diversos
costos desde un mínimo hasta máximo, los cuales están determinados según los costos
que se obtengan en cada escenario posible. Las distintas estrategias pueden compararse
MejorSolución S1 S2 S3 S4 S5
E1 100 0 8 15 42 21E2 80 40 0 13 57 38E3 90 25 22 0 48 42E4 130 12 15 8 0 3E5 110 7 13 8 29 0
Rmax 40 22 15 57 42
Riesgo de la SoluciónEscenario
52

introduciendo un factor que exprese la actitud del riesgo en las opciones que mueven el
proceso de planificación. Para cada estrategia se puede trazar una curva con la siguiente
expresión matemática [57]:
RL= VALmax * α + (1 - α)*VALmin (3.8)
Esta técnica de selección resulta sencilla de aplicar, sin embargo conlleva una
variable subjetiva notable, que significará el riesgo que el planificador deba considerar en
la elección del plan de expansión. En el siguiente ejemplo seguido podemos obtener los
valores máximos y mínimos siguientes [57]:
Tabla 3.3 Ejemplo de técnica Hurvicz (Fuente: referencia [57])
El valor α=1 significa la condición de mínimo riesgo, por tanto la opción seleccionada
corresponde a la de menor valor y por tanto se selecciona el plan S5.
El valor α=0 significa la condición de máximo riesgo, y por tanto se selecciona el
plan el plan S2.
Tabla 3.4 Ejemplo de técnica Hurvicz, variación α (Fuente: referencia [57])
S1 S2 S3 S4 S5Máximo 142 145 138 142 133Mínimo 100 80 90 130 110
Solución
Menor Plan S1 S2 S3 S4 S5 Valor Seleccionado
0 100 80 90 130 110 80 S20.1 104.2 86.5 94.8 131.2 112.3 86.5 S20.2 108.4 93 99.6 132.4 114.6 93 S20.3 112.6 99.5 104.4 133.6 116.9 99.5 S20.4 116.8 106 109.2 134.8 119.2 106 S20.5 121 112.5 114 136 121.5 112.5 S20.6 125.2 119 118.8 137.2 123.8 118.8 S30.7 129.4 125.5 123.6 138.4 126.1 123.6 S30.8 133.6 132 128.4 139.6 128.4 128.4 S3,S50.9 137.8 138.5 133.2 140.8 130.7 130.7 S51 142 145 138 142 133 133 S5
Solución α
53

CAPÍTULO IV METODOLOGÍA DE SOLUCIÓN
La gran mayoría de trabajos y estudios realizados a nivel mundial, están orientados a
resolver el problema de la expansión de la transmisión. Los sistemas de subtransmisión
pueden ser representado como un sistema de transmisión de menor dimensión, en
donde las barras de inyección que permiten la interconexión con el resto del sistema
aguas arriba, se denominan ”nodos de generación”. En ese sentido, es válida su
aplicación de la literatura disponible en la expansión de los sistemas de subtransmisión.
El planeamiento de la expansión de la transmisión ha tenido una evolución en el
modelo matemático usado para representar el problema, desde el modelo de transportes
propuesto por primera vez por Garver en 1970 [26] hasta su representación ideal a través
de modelo AC [60], incluyendo a su vez, aspectos como el planeamiento multietapa [14,
29, 74] y criterio de confiabilidad “n-1” [05, 77, 83], entre otros; así como en la técnica
utilizada para resolver el problema resultante del modelo, desde el más básico como la
programación lineal hasta el más complejo como la programación no lineal entera mixta y
la implementación de técnicas heurísticas y metaheurísticas.
En la actualidad, gran parte de los estudios realizados para resolver el problema de
la expansión, consideran como objetivo determinar la alternativa de menor costo que el
modelo propuesto represente en lo posible la operación real de la red. Para tal fin, se han
desarrollado modelos cada vez más complejos hasta conseguir representarlo idealmente
como el modelo AC [60], optimizando de este modo los costos asociados a la inversión,
operación y pérdidas en la red. Sin embargo, en el modelo AC no se ha encontrado aún
variantes para formular las restricciones de seguridad y de la planificación multietapa.
Para el caso del modelo DC, la aplicación de una de estas variantes consigue apenas
soluciones de buena calidad en sistemas de mediana y gran dimensión, el problema es
mayor si se considera las dos variantes a la vez. Incluso para sistemas de mediana
dimensión, incluir estas dos variables (la planificación multietapa y el criterio n-1), no
sería posible debido a la complejidad del problema. Para el caso del modelo de
transportes, en sistemas de tamaño y complejidad media, utilizando técnicas de

optimización como el Branch and Bound, es posible incluir en la modelación aspectos
como la confiabilidad y la planificación multietapa; sin embargo, las soluciones obtenidas
muchas veces pueden encontrarse muy alejada de la solución óptima.
Al respecto, la normativa peruana vigente respecto a los sistemas de subtransmisión
de alta densidad de carga, establece que el horizonte de planeamiento de la expansión
es de hasta treinta (30) años para el largo plazo, diez (10) años para el mediano plazo y
de cuatro (04) para el corto plazo. Asimismo, establece que se debe justificar la
necesidad de redundancia en el sistema el criterio N-1. Para resolver dicho problema, la
normativa estable que se deben evaluar distintas alternativas de expansión y seleccionar
aquella que constituye la solución con menores costos de inversión, operación y
mantenimiento, y pérdidas; en cada alternativa propone el desarrollo progresivo de la red
manteniendo como patrón la configuración del sistema definido para el año horizonte [56].
En la práctica se realiza el análisis estático para el año horizonte de planeamiento (largo
plazo), y luego con la solución se establece el plan de obras a partir de un equipamiento
progresivo año a año, verificando la factibilidad de la operación a través de las
simulaciones de flujo de potencia.
Otra variable a considerar en la planificación son las desadaptaciones entre la
capacidad de transporte y el crecimiento de la demanda ocasionadas debido a las
incertidumbres propias del sistema se subtransmisión como: la demanda y de su perfil de
carga, los futuros nodos de inyección, la operación de los sistemas eléctricos con
menores márgenes de confiabilidad debido a una definición subjetiva del costo de
compensaciones, la volatilidad de precios en los cables subterráneos, variaciones de
precios en conductores de alta temperatura (cada vez menores), dificultad de conseguir
autorizaciones para nuevas trazas, entre otros. Dichas incertidumbres se han
profundizado a tal punto que los métodos usualmente empleados para resolver la tarea
de planificación carecen de eficacia y resultados prácticos.
Por otro lado, según los resultados obtenidos en el capítulo V de este informe, la
inclusión del criterio de confiabilidad n-1 en la modelación da como resultado elevados
costos de inversión en la subtransmisión (mayor que 1,75 veces al obtenido sin
considerar dicho criterio, para los casos del sistema Garver, IEEE 24 barras y el sistema
de subtransmisión de Luz del Sur). En ese sentido, utilizar dicho criterio bajo diferentes
perspectivas puede alcanzar objetivos en conflicto: 1) los clientes pueden requerir una
mejor confiabilidad del servicio eléctrico pero a la vez las empresas pueden priorizar una
reducción de costos en sus inversiones, ó 2) los clientes pueden requerir una menor
costo del servicio eléctrico pero a la vez las empresas pueden priorizar la seguridad del
55

sistema. En este caso, se presenta un conflicto entre objetivos para los cuales hay que
encontrar un equilibrio. Al respecto, la normativa peruano no exige el cumplimiento del
criterio n-1; sin embargo, establece que ésta puede ser justificada cuando la demanda es
superior a los 30 MW [56].
Por lo tanto, para afrontar dicha problemática, en este proyecto se desarrolla una
metodología de solución al problema de la expansión de la subtransmisión, considerando
las variantes de planificación multietapa, confiabilidad en los enlaces radiales según
criterio n-1 e incertidumbres. El objetivo principal es la obtención de un plan “flexible” y
sostenible en el corto, mediano y largo plazo. Para ello, se desarrolla una metodología
que integra un modelo de optimización, un algoritmo de flujo de potencia para evaluar
soluciones técnicamente viables y técnicas de análisis de riesgos.
La ventaja de utilizar el modelo de transportes y la técnica del Branch and Bound en
la expansión de los sistemas de subtransmisión, radica en la obtención del óptimo global
del sistema (desde el punto de vista de inversión). Sin embargo, como se indicó
anteriormente, ésta solución puede estar alejada de la óptima desde el punto de vista
“técnico-económico”, debido a que sólo se modela la primera ley de Kirchhoff; es decir,
que dicha solución puede resultar técnicamente inviable debido a posibles problemas de
sobrecarga en las líneas y/o de tensión en las barras. Esto puede ser resuelto
introduciendo una variante al modelo para conseguir el resto de soluciones (segundo
óptimo, tercero y así sucesivamente), las cuales posteriormente deben ser validadas
mediante simulaciones de flujo de potencia. La implementación sistemática de esta
variante al modelo de transportes y la de un algoritmo de flujo de potencia, permitirán
obtener la alternativa de menor costo técnicamente factible en un determinado escenario
futuro. En este proyecto se ha implementado dicho análisis sistemático que reemplaza al
modelo ideal AC, y que a su vez hace posible considerar los aspectos de la planificación
multietapa y confiabilidad.
4.1 Metodología propuesta
La metodología propuesta integra un modelo de optimización basado en el modelo
de transportes que contempla la planificación multietapa y el criterio de confiabilidad n-1
en los enlaces radiales, un algoritmo de flujo de potencia para determinar soluciones
técnicamente viables y la evaluación de incertidumbres utilizando la técnica trade-off/risk
o de compromiso/riesgo para encontrar el plan con menores riesgos debido a las
incertidumbres. Comprende tres etapas y se esquematiza en la figura 4.1:
56

• Primera etapa: se determinan los planes de expansión de la subtransmisión y se
desarrollan los futuros, luego se combina cada plan con cada futuro y se crean
escenarios.
Los planes de expansión son obtenidos considerando las opciones: futuros “nodos
de inyección” y/o de interconexión, capacidad de inyección en los “nodos” existentes
y futuros, posibles enlaces entre las subestaciones nuevas y proyectadas
(considerando además el uso de conductores de alta temperatura). Para determinar
dichos planes, se desarrolla un modelo de “planificación multietapa que considera el
criterio de confiabilidad n-1 en los enlaces radiales”.
Los futuros son obtenidos considerando combinaciones de realización de las
siguientes incertidumbres: la proyección de demanda y de su perfil de carga (factor
de carga), el costo de compensación asociado a la energía no suministrada, el precio
de los cables subterráneos y de conductores de alta temperatura, y el precio de
generación.
• Segunda etapa: se determinan los atributos para todos los escenarios obtenidos.
Los atributos considerados en este estudio son: el valor presente de las inversiones,
las variaciones de la tarifa eléctrica asociada a la subtransmisión y el costo total de
ineficiencias. A continuación un breve resumen:
Valor Presente de Inversiones (VPI), representa el costo de las inversiones a
ejecutar en el corto y mediano plazo (horizonte de 10 años, según la normatividad
vigente [56]), traídos a valor presente considerando una tasa de actualización anual
de 12%. Este atributo está asociado a la planificación de corto, mediano y largo
plazo, y está expresado en US$.
Incremento de la Tarifa Eléctrica (ITE), representa el incremento de la tarifa en el
corto plazo correspondiente a la subtransmisión (horizonte de 04 años, según la
normatividad vigente [56]). Dicho valor resulta de dividir (en valor presente) las
inversiones entre la demanda de dicho período, considerando una tasa de
actualización anual de 12%. Este atributo está asociado al plan de inversiones de
corto plazo (04 años) y está expresado en US$/MWh.
Costo Total de Ineficiencias (CTI), representa el costo total correspondiente a las
pérdidas técnicas, el costo de la energía no suministrada y las inversiones
ineficientes. Este atributo también está asociado al plan de inversiones de corto plazo
(04 años) y está expresado en US$.
57

• Tercera etapa: se realiza el análisis del trade-off/risk o para encontrar el plan con
menores riesgos.
Escenarios(1)
Trade/Off – Risk(3)
“Plan Robusto”
Incertidumbres:
Opciones:
- Demanda- Costo de compensación- Factor de carga- Precio de cables y conductores “alta temperatura”
- Futuros “nodos” de inyección - Capacidad de inyección en “nodos” existentes y futuros- Enlaces posibles entre subestaciones (cables, conductor de alta temperatura…)
- VPI- ITE- CTI
Planes
Futuros
Atributos:(2)
Figura 4.1 Metodología Propuesta (Fuente: elaboración propia)
4.2 Determinación de planes de expansión
Para determinar los planes de expansión se ha implementado una aplicación en VBA
de Excel que formula el problema de expansión utilizando el modelo de transportes y es
resuelto utilizando los solvers libre CBC (COIN Branch and Cutsolver) y/o GLPK (GNU
Linear Programming Kit). La aplicación formula el problema y los guarda en archivos de
texto con extensión “lp”; luego, es resuelto con los solvers CBC o GLPK, y los resultados
se guardan en un archivo texto con extensión “out”. Este proceso es secuencial, se inicia
con la obtención del óptimo global (costo1) reportado en el archivo “XXX1.out” luego de
ejecutar el primer “pl” (XXX1.pl) formulado; luego se genera el segundo “pl” (XXX2.pl)
58
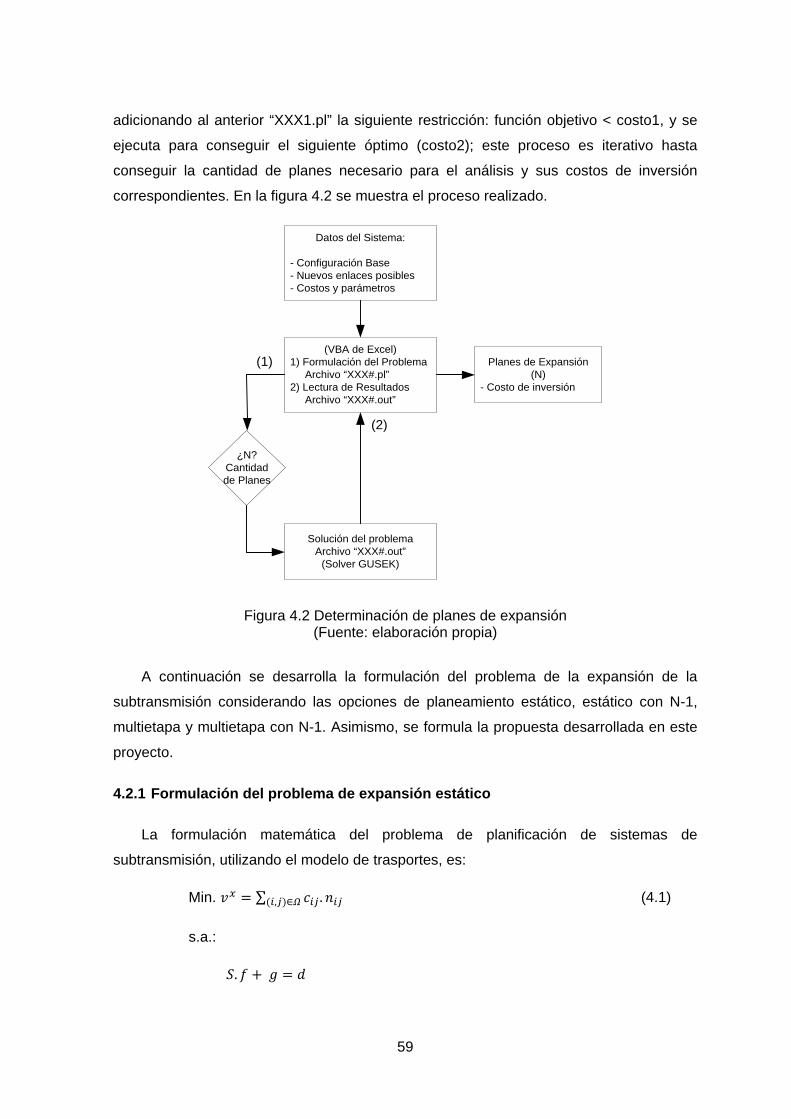
adicionando al anterior “XXX1.pl” la siguiente restricción: función objetivo < costo1, y se
ejecuta para conseguir el siguiente óptimo (costo2); este proceso es iterativo hasta
conseguir la cantidad de planes necesario para el análisis y sus costos de inversión
correspondientes. En la figura 4.2 se muestra el proceso realizado.
Datos del Sistema:
- Configuración Base- Nuevos enlaces posibles- Costos y parámetros
(VBA de Excel)1) Formulación del Problema Archivo “XXX#.pl”2) Lectura de Resultados Archivo “XXX#.out”
¿N?Cantidad de Planes
Solución del problemaArchivo “XXX#.out”
(Solver GUSEK)
Planes de Expansión(N)
- Costo de inversión
(1)
(2)
Figura 4.2 Determinación de planes de expansión (Fuente: elaboración propia)
A continuación se desarrolla la formulación del problema de la expansión de la
subtransmisión considerando las opciones de planeamiento estático, estático con N-1,
multietapa y multietapa con N-1. Asimismo, se formula la propuesta desarrollada en este
proyecto.
4.2.1 Formulación del problema de expansión estático
La formulación matemática del problema de planificación de sistemas de
subtransmisión, utilizando el modelo de trasportes, es:
Min. 𝑣𝑥 = ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 (4.1)
s.a.:
𝑆. 𝑓 + 𝑔 = 𝑑
59

�𝑓𝑖𝑗� = �𝑛𝑖𝑗0 + 𝑛𝑖𝑗�. 𝑓𝑖𝑗−𝑚𝑎𝑥
0 ≤ 𝑔 ≤ 𝑔𝑚𝑎𝑥
0 ≤ 𝑛𝑖𝑗 ≤ 𝑛𝑖𝑗−𝑚𝑎𝑥
∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 ≤ 𝑣𝑥−1 V x > 1
𝑛𝑖𝑗0 , 𝑛𝑖𝑗 Entero
𝑓𝑖𝑗 Irrestricto
(i, j) ∈Ω
En el sistema (4.1), vx es el costo del plan x que se desea optimizar, cij es el costo de
adicionar un circuito en la rama i−j, Ω representa el conjunto de los enlaces existentes en
la red base y de nuevos enlaces, S es la matriz de incidencia nodo-rama del sistema
eléctrico, f es el vector de flujos cuyos elementos representan el flujo total en el camino
i−j(circuitos existentes y nuevos), g es el vector de generaciones nodales, d es el vector
de demandas nodales, fij-max es el flujo máximo permitido para un circuito en el camino i−j,
gmax es el vector de máxima generación nodal, nij es el número de circuitos adicionados
en la rama i−j, nij-max es el número máximo de circuitos que pueden ser adicionados en la
rama i−j, y nij0 es el número de existentes en la rama i−j en la configuración base o inicial.
El primer conjunto de restricciones representa las ecuaciones que describen la
primera ley de Kirchhoff, una ecuación para cada barra del sistema; el segundo conjunto
de restricciones representa la restricción de capacidad de transmisión de los circuitos
(líneas y/o transformadores), el valor absoluto es necesario debido a que los flujos de
potencia pueden fluir en los dos sentidos. Las otras restricciones son triviales y
representan restricciones de límite de generación y de circuitos adicionados en cada
camino candidato i–j. Las restricciones fij son irrestrictas en valor y las variables nij deben
ser enteras lo que representa la mayor fuente de complejidad en el problema. Por último,
la restricción ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 ≤ 𝑣𝑥−1es aplicable a partir del segundo plan. En este modelo
se tiene un problema de programación lineal entera mixta (PLEM)
4.2.2 Formulación del problema de expansión estático con criterio “n-1”
La formulación matemática del problema anterior incluyendo la confiabilidad a través
del criterio “n-1” queda como:
Min. 𝑣𝑥 = ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 (4.2)
60

s.a.:
𝑆. 𝑓 + 𝑔 = 𝑑
�𝑓𝑖𝑗� = �𝑛𝑖𝑗0 + 𝑛𝑖𝑗�. 𝑓𝑖𝑗−𝑚𝑎𝑥
0 ≤ 𝑔 ≤ 𝑔𝑚𝑎𝑥
0 ≤ 𝑛𝑖𝑗 ≤ 𝑛𝑖𝑗−𝑚𝑎𝑥
∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 ≤ 𝑣𝑥−1 V x > 1
𝑛𝑖𝑗0 , 𝑛𝑖𝑗 Entero
𝑓𝑖𝑗 Irrestricto
(i, j) ∈Ω
Criterio N-1:
𝑆. 𝑓𝑝 + 𝑔𝑝 = 𝑑𝑝
�𝑓𝑖𝑗𝑝� = �𝑛𝑖𝑗
0 + 𝑛𝑖𝑗�. 𝑓𝑖𝑗−𝑚𝑎𝑥 V (i,j) ∈ 1, 2, 3, … n y (i,j) ≠ p
�𝑓𝑖𝑗𝑝� = �𝑛𝑖𝑗
0 + 𝑛𝑖𝑗 − 1�. 𝑓𝑖𝑗−𝑚𝑎𝑥 (i,j) = p
0 ≤ 𝑔𝑝 ≤ 𝑔𝑚𝑎𝑥
�𝑛𝑖𝑗0 + 𝑛𝑖𝑗 − 1� ≥ 0
𝑓𝑖𝑗𝑝 Irrestricto
En el sistema (4.2),p representa al camino i–j en la cual en uno de sus circuitos
ocurre la contingencia, fp es el vector de flujos cuyos elementos representan el flujo total
en el camino i–j para la contingencia del elemento p, gp es el vector de generaciones
nodales para la contingencia del elemento p y dp es el vector de demandas nodales para
la contingencia del elemento p (dp es igual a d para el caso normal, sin contingencias; sin
embargo, el valor de gp es diferente a g debido a la contingencia).
La interpretación de las ecuaciones adicionales de este modelo son similares al
anterior, las restricciones S.fp + gp = d representan las ecuaciones que describen la
primera ley de Kirchhoff ante la salida del elemento p, una ecuación para cada barra del
sistema; la inecuación |fijp| ≤ (nij + nij0).fij-max representa la restricción de capacidad de
61

transmisión de los circuitos distintos al elemento fallado cuando sale de servicio el
elemento p, la inecuación |fijp| ≤ (nij + nij0 - 1).fij-max representa la restricción de capacidad
de transmisión de los circuitos que forman parte del elemento fallado cuando sale de
servicio el elemento p. Las otras restricciones son triviales y representan restricciones de
límite de generación y de circuitos adicionados en cada camino candidato i–j. Las
restricciones fijp son irrestrictas en valor. Por último, la restricción ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗(𝑖,𝑗)∈𝛺 ≤ 𝑣𝑥−1es
aplicable a partir del segundo plan. En este modelo se tiene un problema de PLEM.
4.2.3 Formulación del problema de expansión multietapa
La formulación matemática para resolver el problema de planificación de la
expansión multietapa, es:
Min. 𝑣𝑥 = ∑ �𝛿𝑖𝑛𝑣𝑡 ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗
𝑡(𝑖,𝑗)∈𝛺 �𝑇
𝑡=1 (4.3)
s.a.:
𝑆. 𝑓𝑡 + 𝑔𝑡 = 𝑑𝑡
�𝑓𝑖𝑗𝑡 � = �𝑛𝑖𝑗
0 + � 𝑛𝑖𝑗𝑚
𝑡
𝑚=1
� . 𝑓𝑖𝑗−𝑚𝑎𝑥
0 ≤ � 𝑛𝑖𝑗𝑚
𝑡
𝑚=1
≤ 𝑛ij−max
0 ≤ 𝑔𝑡 ≤ 𝑔𝑚𝑎𝑥𝑡
∑ �𝛿𝑖𝑛𝑣𝑡 ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗
𝑡(𝑖,𝑗)∈𝛺 �𝑇
𝑡=1 ≤ 𝑣𝑥−1 V x > 1
𝑛𝑖𝑗𝑚 Entero
𝑓𝑖𝑗𝑡 Irrestricto
(i, j) ∈Ω
En el sistema (4.4), T es el número de etapas, t es la etapa de planificación, 𝛿𝑖𝑛𝑣𝑡 es
el factor que lleva la inversión realizada en la etapa t a valor presente, ft es el vector de
flujos cuyos elementos representan el flujo total en el camino i–j correspondiente a la
etapa t, gt es el vector de generaciones nodales correspondiente a la etapa t, dt es el
vector de demandas nodales, fij-max es el flujo máximo permitido para un circuito en el
camino i–j, gmaxt es el vector de máxima generación nodal correspondiente a la etapa t,
62

nijm es el número de circuitos adicionados en la rama i–j en la etapa m previo a la etapa t,
nij-max es el número máximo de circuitos que pueden ser adicionados en la rama i−j, y nij0
es el número de existentes en la rama i−j en la configuración base o inicial.
La interpretación de las ecuaciones adicionales de este modelo son similares a los
anteriores, las restricciones 𝑆. 𝑓𝑡 + 𝑔𝑡 = 𝑑𝑡 representan las ecuaciones que describen la
primera ley de Kirchhoff correspondiente a la etapa t, una ecuación para cada barra del
sistema; la inecuación �𝑓𝑖𝑗𝑡 � = �𝑛𝑖𝑗
0 + ∑ 𝑛𝑖𝑗𝑚𝑡
𝑚=1 �. 𝑓𝑖𝑗−𝑚𝑎𝑥 representa la restricción de
capacidad de transmisión de los circuitos en la etapa t, el valor absoluto es necesario
debido a que los flujos de potencia pueden fluir en los dos sentidos. Las otras
restricciones son triviales y representan restricciones de límite de generación y de
circuitos adicionados en cada camino candidato i−j. Las restricciones 𝑓𝑖𝑗𝑡 son irrestrictas
en valor y las variables 𝑛𝑖𝑗𝑚 deben ser enteras lo que representa la mayor fuente de
complejidad en el problema. Por último, la restricción ∑ �𝛿𝑖𝑛𝑣𝑡 ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗
𝑡(𝑖,𝑗)∈𝛺 �𝑇
𝑡=1 ≤ 𝑣𝑥−1es
aplicable a partir del segundo plan. En este modelo se tiene un problema de PLEM.
4.2.4 Formulación del problema de expansión multietapa con criterio n-1
La formulación matemática del para resolver el problema de planificación de la
expansión multietapa incluyendo la confiabilidad a través del criterio “n-1” es:
Min. 𝑣𝑥 = ∑ �𝛿𝑖𝑛𝑣𝑡 ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗
𝑡(𝑖,𝑗)∈𝛺 �𝑇
𝑡=1 (4.4)
s.a.:
𝑆. 𝑓𝑡 + 𝑔𝑡 = 𝑑𝑡
�𝑓𝑖𝑗𝑡 � = �𝑛𝑖𝑗
0 + � 𝑛𝑖𝑗𝑚
𝑡
𝑚=1
� . 𝑓𝑖𝑗−𝑚𝑎𝑥
0 ≤ � 𝑛𝑖𝑗𝑚
𝑡
𝑚=1
≤ 𝑛ij−max
0 ≤ 𝑔𝑡 ≤ 𝑔𝑚𝑎𝑥𝑡
∑ �𝛿𝑖𝑛𝑣𝑡 ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗
𝑡(𝑖,𝑗)∈𝛺 �𝑇
𝑡=1 ≤ 𝑣𝑥−1 V x > 1
𝑛𝑖𝑗𝑚 Entero
𝑓𝑖𝑗𝑡 Irrestricto
63

(i, j) ∈Ω
Criterio N-1:
𝑆. 𝑓𝑡,𝑝 + 𝑔𝑡,𝑝 = 𝑑𝑡,𝑝
�𝑓𝑖𝑗𝑡,𝑝� = �𝑛𝑖𝑗
0 + ∑ 𝑛𝑖𝑗𝑚𝑡
𝑚=1 �. 𝑓𝑖𝑗−𝑚𝑎𝑥 V (i,j) ∈ 1, 2, 3, … n y (i,j) ≠
p
�𝑓𝑖𝑗𝑡,𝑝� = �𝑛𝑖𝑗
0 + ∑ 𝑛𝑖𝑗𝑚𝑡
𝑚=1 − 1�. 𝑓𝑖𝑗−𝑚𝑎𝑥 (i,j) = p
0 ≤ 𝑔𝑡,𝑝 ≤ 𝑔𝑚𝑎𝑥
�𝑛𝑖𝑗0 + 𝑛𝑖𝑗 − 1� ≥ 0
𝑓𝑖𝑗𝑝 Irrestricto
En el sistema (4.4),p representa al camino i−j en la cual en uno de sus circuitos
ocurre la contingencia, ft,p es el vector de flujos cuyos elementos representan el flujo total
en el camino i−j para la contingencia del elemento p en la etapa t, gt,p es el vector de
generaciones nodal es para la contingencia del elemento p en la etapa t y dt,p es el vector
de demandas nodal es para la contingencia del elemento p en la etapa t (dt,p es igual a dt
para el caso normal, sin contingencias; sin embargo, el valor de gt,p es diferente a g t
debido a la contingencia).
La interpretación de las ecuaciones adicionales de este modelo son similares al
anterior, las restricciones 𝑆. 𝑓𝑡,𝑝 + 𝑔𝑡,𝑝 = 𝑑𝑡,𝑝representan las ecuaciones que describen la
primera ley de Kirchhoff ante la salida del elemento pen la etapa t, una ecuación para
cada barra del sistema; la inecuación �𝑓𝑖𝑗𝑡,𝑝� = �𝑛𝑖𝑗
0 + ∑ 𝑛𝑖𝑗𝑚𝑡
𝑚=1 �. 𝑓𝑖𝑗−𝑚𝑎𝑥representa la
restricción de capacidad de transmisión del los circuitos distintos al elemento fallado
cuando sale de servicio el elemento p en la etapa t, la inecuación �𝑓𝑖𝑗𝑡,𝑝� = �𝑛𝑖𝑗
0 +
∑ 𝑛𝑖𝑗𝑚𝑡
𝑚=1 − 1�. 𝑓𝑖𝑗−𝑚𝑎𝑥representa la restricción de capacidad de transmisión del los
circuitos que forman parte del elemento fallado cuando sale de servicio el elemento pen
la etapa t. Las otras restricciones son triviales y representan restricciones de límite de
generación y de circuitos adicionados en cada camino candidato i−j. Las restricciones fijt,p
son irrestrictas en valor. Por último, la restricción ∑ �𝛿𝑖𝑛𝑣𝑡 ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗
𝑡(𝑖,𝑗)∈𝛺 �𝑇
𝑡=1 ≤ 𝑣𝑥−1es
aplicable a partir del segundo plan. En este modelo se tiene un problema de PLEM.
64

4.2.5 Formulación del problema de expansión multietapa considerando el criterio n-1 en los enlaces radiales
La formulación matemática para resolver el problema de planificación de la
expansión multietapa considerando el criterio n-1 en los enlaces radiales, es:
Min. 𝑣𝑥 = ∑ �𝛿𝑖𝑛𝑣𝑡 ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗
𝑡(𝑖,𝑗)∈𝛺 �𝑇
𝑡=1 (4.5)
s.a.:
𝑆. 𝑓𝑡 + 𝑔𝑡 = 𝑑𝑡
�𝑓𝑖𝑗𝑡 � = �𝑛𝑖𝑗
0 + � 𝑛𝑖𝑗𝑚
𝑡
𝑚=1
� . 𝑓𝑖𝑗−𝑚𝑎𝑥
0 ≤ � 𝑛𝑖𝑗𝑚
𝑡
𝑚=1
≤ 𝑛ij−max
0 ≤ � � 𝑛𝑖𝑗𝑚
𝑡
𝑚=1𝑏∈𝛺2 ≤ 2
0 ≤ 𝑔𝑡 ≤ 𝑔𝑚𝑎𝑥𝑡
∑ �𝛿𝑖𝑛𝑣𝑡 ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗
𝑡(𝑖,𝑗)∈𝛺 �𝑇
𝑡=1 ≤ 𝑣𝑥−1 V x > 1
𝑛𝑖𝑗𝑚 Entero
𝑓𝑖𝑗𝑡 Irrestricto
(i, j) ∈Ω
En el sistema (4.5), Ω2 representa el conjunto de barras en la red (existentes y
futuras), el resto de parámetros es similar al descrito anteriormente. Para modelar el
criterio n-1 en los enlaces radiales se adicional la cuarta restricción
0 ≤ ∑ ∑ 𝑛𝑖𝑗𝑚𝑡
𝑚=1𝑏∈𝛺2 ≤ 2, con la cual se garantiza que todas las barras cuenten al menos
con dos circuitos de alimentación. La interpretación del resto de ecuaciones es similar al
descrito en los modelos anteriores. Similar a los otros casos descritos, en este modelo
también se tiene un problema de PLEM.
65

4.3 Cálculo de la energía no suministrada (ENS)
Para el cálculo de la energía no suministrada, previamente se determina la demanda
no atendida en cada plan, luego utilizando el factor de carga del sistema se determina la
ENS. El cálculo previo de la demanda no atendida se realiza para dos situaciones:
contingencias e incertidumbres. En el primer caso el cálculo considera contingencias en
todos los elementos de un determinado plan; en el segundo, se consideran los
escenarios de demanda “pesimistas y optimistas”. Los planes obtenidos están diseñados
para un escenario de demanda (base); si se consideran escenarios optimistas (mayor al
base), se tendrá una mayor demanda no atendida; y si se consideran escenarios
pesimistas (menor al base), se tendrá una mayor demanda no atendida.
Para determinar la demanda no atendida, se formula un problema de programación
lineal (“pl”) en la que se minimiza la demanda no atendida por el sistema sujeto a las
restricciones de capacidad de la red. Luego utilizando el factor de carga del sistema se
determina la energía no suministrada. En la figura 4.3 se muestra el procedimiento para
determinar la demanda no atendida; asimismo, en los sistemas 4.6 y 4.7 se muestra la
formulación matemática para los dos casos: planes que no cumplen con el criterio n-1 y
para aquéllos escenarios de incertidumbre en la demanda, respectivamente.
Datos del Sistema:
- Configuración Base- Parámetros
(VBA de Excel)1) Formulación de problema Archivo “XXX#_ENS.pl”2) Lectura de resultados Archivo “XXX#_ENS.out”
Solución del problemaArchivo “XXX#_ENS.out”
(solver GUSEK)
Energía No Suministrada(N)
(1) (2)
Planes de Expansión(N)
- Costo de inversión
Figura 4.3 Determinación de ENS (Fuente: elaboración propia)
4.3.1 Cálculo de la demanda no atendida debido a contingencias
A continuación de desarrolla la formulación matemática utilizado para optimizar la
demanda no atendida en caso de contingencias.
66

Min. 𝐸𝑁𝑆𝑥 = ∑ ∑ �𝑑𝑗𝑥 − 𝑑𝑗
𝑘�𝑗∈𝛺2𝑘∈𝛺1 (4.6)
s.a.:
� (𝑆. 𝑓𝑘 + 𝑔𝑘)𝑘
= 𝑑𝑘
�𝑓𝑖𝑗𝑘� = 𝑛𝑖𝑗
𝑘 . 𝑓𝑖𝑗−𝑚𝑎𝑥
𝑔𝑗𝑘 ≤ 𝑔𝑗−𝑚𝑎𝑥
𝑑𝑗𝑘 ≤ 𝑑𝑗−𝑚𝑎𝑥
𝑛𝑖𝑗𝑘 Entero
𝑓𝑖𝑗𝑘 Irrestricto
k ∈Ω1
i ∈Ω2
(i,j) ∈Ω3
En el sistema (4.6),x representa a un determinado plan, 𝑑𝑗𝑥es el vector de demanda
nodal base del plan x (dicha demanda debe ser el mismo en todos los planes), 𝑑𝑗𝑘es el
vector de demanda nodal a calcular,Ω1 representa el conjunto de los enlaces del plan
“x”,Ω2 representa el conjunto de nodos del plan “x”, S es la matriz de incidencia nodo-
rama del sistema eléctrico, f es el vector de flujos cuyos elementos representan el flujo
total en el camino i−j, g es el vector de generaciones nodales, d es el vector de demandas
nodales, fij-max es el flujo máximo permitido para un circuito en el camino i−j, dix es el
nuevo vector de máxima demanda nodal correspondientes al plan “x” debido a la
incertidumbre, gix es el vector de máxima generación nodal correspondientes al plan “x”,
nijx es el número de circuitos en la rama i−j correspondientes al plan “x”.
El primer conjunto de restricciones representa las ecuaciones que describen la
primera ley de Kirchhoff, una ecuación para cada barra del sistema; el segundo conjunto
de restricciones representa la restricción de capacidad de transmisión de los circuitos, el
valor absoluto es necesario debido a que los flujos de potencia pueden fluir en los dos
sentidos. Las otras restricciones son triviales y representan restricciones de límite de
generación y demanda. Por último, las restricciones fij son irrestrictas en valor y las
67

variables nij deben ser enteras lo que representa la mayor fuente de complejidad en el
problema.
4.3.2 Cálculo de la demanda no atendida debido a incertidumbres en la demanda
A continuación de desarrolla la formulación matemática utilizado para optimizar la
demanda no atendida debido a incertidumbres en la demanda (escenarios pesimistas y
optimistas).
Min. 𝐸𝑁𝑆𝑥 = ∑ ∑ �𝑑𝑗𝑦 − 𝑑𝑗
𝑘�𝑗∈𝛺2𝑘∈𝛺1 (4.7)
s.a.:
� (𝑆. 𝑓𝑘 + 𝑔𝑘)𝑘
= 𝑑𝑘
�𝑓𝑖𝑗𝑘� = 𝑛𝑖𝑗
𝑘 . 𝑓𝑖𝑗−𝑚𝑎𝑥
𝑔𝑗𝑘 ≤ 𝑔𝑗−𝑚𝑎𝑥
𝑑𝑗𝑘 ≤ 𝑑𝑗−𝑚𝑎𝑥
𝑛𝑖𝑗𝑘 Entero
𝑓𝑖𝑗𝑘 Irrestricto
k ∈Ω1
i ∈Ω2
(i,j) ∈Ω3
En el sistema (4.7), x representa a un determinado plan, 𝑑𝑗𝑦es el vector de demanda
nodal correspondiente a un escenario optimista (dicha demanda debe ser el mismo en
todos los planes). El resto de parámetros y ecuaciones son similares al descrito en el
sistema 4.5.
4.4 Cálculo de pérdidas
Para determinar las pérdidas en cada plan, la aplicación ejecuta un algoritmo de flujo
de carga implementado en el software libre OCTAVE. En la figura 4.3 se muestra el
proceso realizado.
68

Datos del Sistema:
- Configuración Base- Parámetros
(VBA de Excel)1) Archivo datos “FC” Archivo “XXX#.m”2) Lectura de Resultados Archivo “XXX#.mat”
Algoritmo de FCArchivo “XXX#.Mat”
(OCTAVE)
Pérdidas(N)
(1) (2)
Planes de Expansión(N)
- Costo de inversión
Figura 4.4 Determinación de pérdidas (Fuente: elaboración propia)
4.5 Cálculo de las pérdidas económicas debido a inversiones ineficientes
Los planes obtenidos tiene un costo de inversión asociado y comparables en el
escenario base, si se consideran escenarios pesimistas, es probable que en algunos
planes se presente un exceso de inversiones. Esto situación no se presentaría en
escenarios optimistas. El exceso de inversiones (escenarios pesimistas) se determina de
la diferencia del costo de cada plan y el costo de la solución óptima considerando el
nuevo escenario de demanda. En la figura 4.5 se muestra el proceso realizado, y en el
sistema 4.8 se muestra la formulación matemática para determinar la solución óptima
considerando los nuevos escenarios de demanda.
Datos del Sistema:
- Configuración Base- Parámetros
(VBA de Excel)Formulación de problema
Archivo “XXX#_PEI.pl”
Solución del problemaArchivo “XXX#PEI.out”
(solver GUSEK)
PEI(N)
Incertidumbre:- Escenario de Demanda
Planes de Expansión(N)
- Costo de inversión
(+)(-)Costo de Solución
“óptimo”
69

Figura 4.5 Determinación de PEI (Fuente: elaboración propia)
Min. 𝑣𝑥 = ∑ �𝛿𝑖𝑛𝑣𝑡 ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗
𝑡(𝑖,𝑗)∈𝛺 �𝑇
𝑡=1 (4.8)
s.a.:
𝑆. 𝑓𝑡 + 𝑔𝑡 = 𝑑𝑡
�𝑓𝑖𝑗𝑡 � = �𝑛𝑖𝑗
0 + � 𝑛𝑖𝑗𝑚
𝑡
𝑚=1
� . 𝑓𝑖𝑗−𝑚𝑎𝑥
0 ≤ � 𝑛𝑖𝑗𝑚
𝑡
𝑚=1
≤ 𝑛ij−max
0 ≤ 𝑔𝑡 ≤ 𝑔𝑚𝑎𝑥𝑡
∑ �𝛿𝑖𝑛𝑣𝑡 ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗
𝑡(𝑖,𝑗)∈𝛺 �𝑇
𝑡=1 ≤ 𝑣𝑥−1 V x > 1
𝑛𝑖𝑗𝑚 Entero
𝑓𝑖𝑗𝑡 Irrestricto
(i, j) ∈Ω
Criterio N-1:
𝑆. 𝑓𝑡,𝑝 + 𝑔𝑡,𝑝 = 𝑑𝑡,𝑝
�𝑓𝑖𝑗𝑡,𝑝� = �𝑛𝑖𝑗
0 + 𝑛𝑖𝑗�. 𝑓𝑖𝑗−𝑚𝑎𝑥 V (i,j) ∈ 1, 2, 3, … n y (i,j) ≠ p
�𝑓𝑖𝑗𝑡,𝑝� = �𝑛𝑖𝑗
0 + 𝑛𝑖𝑗 − 1�. 𝑓𝑖𝑗−𝑚𝑎𝑥 (i,j) = p
0 ≤ 𝑔𝑡,𝑝 ≤ 𝑔𝑚𝑎𝑥
�𝑛𝑖𝑗0 + 𝑛𝑖𝑗 − 1� ≥ 0
𝑓𝑖𝑗𝑝 Irrestricto
En el sistema (4.4),p representa al camino i−j en la cual en uno de sus circuitos
ocurre la contingencia, ft,p es el vector de flujos cuyos elementos representan el flujo total
en el camino i−j para la contingencia del elemento p en la etapa t, gt,p es el vector de
70

generaciones nodales para la contingencia del elemento p en la etapa t y dt,p es el vector
de demandas nodales para la contingencia del elemento p en la etapa t.
La interpretación de las ecuaciones adicionales de este modelo son similares al
anterior, las restricciones 𝑆. 𝑓𝑡,𝑝 + 𝑔𝑡,𝑝 = 𝑑𝑡,𝑝representan las ecuaciones que describen la
primera ley de Kirchhoff ante la salida del elemento pen la etapa t, una ecuación para
cada barra del sistema; la inecuación �𝑓𝑖𝑗𝑡,𝑝� = �𝑛𝑖𝑗
0 + 𝑛𝑖𝑗�. 𝑓𝑖𝑗−𝑚𝑎𝑥representa la restricción
de capacidad de transmisión del los circuitos distintos al elemento fallado cuando sale de
servicio el elemento p, la inecuación �𝑓𝑖𝑗𝑡,𝑝� = �𝑛𝑖𝑗
0 + 𝑛𝑖𝑗 − 1�. 𝑓𝑖𝑗−𝑚𝑎𝑥representa la
restricción de capacidad de transmisión de los circuitos que forman parte del elemento
fallado cuando sale de servicio el elemento p. Las otras restricciones son triviales y
representan restricciones de límite de generación y de circuitos adicionados en cada
camino candidato i−j. Las restricciones fijt,p son irrestrictas en valor. Por último, la
restricción ∑ �𝛿𝑖𝑛𝑣𝑡 ∑ 𝑐𝑖𝑗 . 𝑛𝑖𝑗
𝑡(𝑖,𝑗)∈𝛺 �𝑇
𝑡=1 ≤ 𝑣𝑥−1es aplicable a partir del segundo plan. En este
modelo se tiene un problema de PLEM.
4.6 Descripción de software CBC, GLPK y OCTAVE
Cbc (Coin or Branch and Cut) es un programa desarrollado para resolver problemas
de programación lineal entera mixta de gran escala escrito en C++. Puede ser utilizado
como una biblioteca que se puede llamar o utilizando un ejecutable independiente. Se le
puede llamar a través de AMPL (nativa), GAMS (usando los enlaces proporcionados por
los servicios de optimización y proyectos GAMSlinks), OpenSolver de Excel, entre otros.
GLPK (GNU Linear Programming Kit) es un programa libre que está desarrollado
para la resolución de problemas de programación lineal de gran escala, problemas de
programación entera mixta y otros problemas relacionados. Es un conjunto de funciones
construidas en ANSI C organizadas en forma de librería. Puede utilizarse para la
resolución directa de problemas mediante el intérprete glpsol.
Octave es un programa libre para realizar cálculos numéricos. Es considerado el
equivalente libre de MATLAB. Entre varias características que comparten se puede
destacar que ambos ofrecen un intérprete permitiendo ejecutar órdenes en modo
interactivo.
En este trabajo, para resolver el problema de optimización se utiliza los solver CBC
(cbc.exe) y/o GLPK (glpsol.exe), y para los flujos de carga se utiliza el OCTAVE
(octave.exe), ambos son ejecutados desde una aplicación desarrollada en VBA de Excel.
71
CAPÍTULO V APLICACIÓN DE MODELO DE OPTIMIZACIÓN
En este capítulo se pone a prueba los modelos formulados en el capítulo IV sobre dos
sistemas eléctricos existentes en la literatura especializada: el sistema Garver y el
sistema IEEE de 24 barras. Los resultados obtenidos son comparados con soluciones
conocidas en la literatura especializada. Asimismo, se muestran los resultados de su
aplicación al sistema de subtransmisión de Luz del Sur.
5.1 Sistema Garver
Este sistema fue inicialmente presentado en la referencia [25], poniendo a disposición
los datos necesarios para las simulaciones del planeamiento de la expansión de la
transmisión que consideren la formulación CC o alguna de sus variantes. La topología
inicial del sistema es mostrada en la Figura 5.1. En la misma se observa que el sistema
posee 6 barras, 3 generadores (totalizando una capacidad máxima de 1100 MW) y 5
centros de carga (totalizando una demanda proyectada de 760 MW). Se observa también
en trazos gruesos la red inicial, y en trazos punteados las posibles nuevas rutas para la
expansión de la red.
La expansión de la red puede ser efectuada de dos maneras: con la construcción de
refuerzos (circuitos construidos en paralelo a un circuito ya existente), o con la
construcción de adiciones (circuitos construidos en una de las posibles nuevas rutas). En
la figura 5.1 se observa que existen 6 rutas donde podrían ser construidos refuerzos y 9
rutas donde podrían ser construidas adiciones, totalizando 15 rutas de expansión (en
cada una de las cuales se podrían construir como máximo 5 líneas de transmisión). El
detalle completo de los datos del sistema puede ser encontrado en el Apéndice A.1.

Barra 1
Barra 2
Barra 5
Barra 3
Barra 6 Barra 4
50.0
80.0
165.0
545.0
240.0
240.0
160.0
40.0
R1
R3R13
R7R10
R14
R9
R12 R15 R5
R11
R4
R2
R6
R8
Figura 5.1 Sistema Garver: configuración inicial (Fuente: elaboración propia)
El análisis de efectúa para dos escenarios de generación: el primero, considera una
generación total de 50 MW en la barra 1 y 165 MW en la barra 3 (conocido como el caso
sin redespacho); y el segundo, considera una generación total de 150 MW en la barra 1 y
360 MW en la barra 3 (conocido como el caso con redespacho).
Adicionalmente, para el planeamiento multietapa se considera un horizonte de
planeamiento de veinte (20) años con tres (03) etapas intermedias: año 5, año 10, año
15. Asimismo, para determinar el factor de actualización se considera una tasa anual de
12%.
5.1.1 Modelo estático
Para el escenario de generación 1 se encuentran cinco (05) soluciones óptimas con
un costo de US$ 200 x 106. Asimismo, para el escenario de generación 2 se encuentran
73

cuatro (04) soluciones óptimas con un costo de US$ 110 x 106. En la tabla 5.1 se
muestran los resultados obtenidos y la cantidad de circuitos adicionados en cada enlace.
Tabla 5.1 Resultados del modelo estático (Fuente: elaboración propia)
Enlaces “n”
Circuitos Existentes
Escenario SIN Redespacho (nuevos circuitos)
Escenario CON Redespacho (nuevos circuitos)
N0 N1 N2 N3 N4 N5 N1 N2 N3 N4
n1-2 1 0 0 0 0 0 0 0 0 0
n1-3 0 0 0 0 0 0 0 0 0 0
n1-4 1 0 0 0 0 0 0 0 0 0
n1-5 1 1 0 1 0 0 0 0 0 0
n1-6 0 0 0 0 0 0 0 0 0 0
n2-3 1 0 0 0 0 0 0 0 0 0
n2-4 1 0 0 0 0 0 0 0 0 0
n2-5 0 0 0 0 0 0 0 0 0 0
n2-6 0 4 5 3 4 3 3 2 1 0
n3-4 0 0 0 0 0 0 0 0 0 0
n3-5 1 0 1 0 1 1 1 1 1 1
n3-6 0 0 0 0 0 0 0 0 0 0
n4-5 0 0 0 0 0 0 0 0 0 0
n4-6 0 2 1 3 2 3 0 1 2 3
n5-6 0 0 0 0 0 0 0 0 0 0
Costo (mlls ): 200 200 200 200 200 110 110 110 110
Del tabla se observa que las soluciones óptimas obtenidas son igual a los obtenidos
en la literatura especializada [13, 15, 17, 22, 24, 30, entre otros].
5.1.2 Modelo estático considerando criterio “n-1”
La solución óptima encontrada para los escenarios de generación 1 y 2 corresponden
a un costo de US$ 357 x 106 y de US$ 201 x 106, respectivamente. En la tabla 5.2 se
muestran los resultados obtenidos y la cantidad de circuitos adicionados en cada enlace.
Tabla 5.2 Resultados del modelo estático considerando el criterio n-1 (Fuente: elaboración propia)
Enlaces “n”
Circuitos Existentes
Escenario SIN Redespacho
(nuevos circuitos)
Escenario CON Redespacho
(nuevos circuitos) N0 N1 N1
n1-2 1 0 0
n1-3 0 0 0
n1-4 1 0 0
74

Enlaces “n”
Circuitos Existentes
Escenario SIN Redespacho
(nuevos circuitos)
Escenario CON Redespacho
(nuevos circuitos) N0 N1 N1
n1-5 1 0 0
n1-6 0 0 0
n2-3 1 0 0
n2-4 1 0 0
n2-5 0 0 0
n2-6 0 3 2
n3-4 0 0 0
n3-5 1 1 1
n3-6 0 2 n4-5 0 0 0
n4-6 0 3 2
n5-6 0 1 1
Costo (mlls ): 357 201
De la tabla se observa que al incluir el criterio n-1 en la modelación el costo de las
soluciones obtenidas para los escenarios de generación 1 y 2 se incrementa en 78,5% y
82,7%, respectivamente.
5.1.3 Modelo dinámico
La solución óptima encontrada para el escenario de generación 1 tiene un costo de
US$ 50.1 x 106 en valor presente (US$ 200 x 106 como suma aritmética); dicha solución
además es técnicamente factible. Para el escenario 2, la solución óptima tiene un costo
de US$ 20.5 x 106 en valor presente; sin embargo, no es técnicamente factible. La mejor
solución factible tiene un costo de US$ 52 x 106 en valor presente (US$ 110 x 106 como
suma aritmética), y corresponde al cuarto de menor costo. En la tabla 5.3 se muestran los
resultados obtenidos y la cantidad de circuitos adicionados en cada enlace.
Tabla 5.3 Resultados del modelo dinámico (Fuente: elaboración propia)
Enlaces “n”
Circuitos Existentes
Escenario SIN Redespacho (nuevos circuitos)
Escenario CON Redespacho (nuevos circuitos)
N0 N1 N2 N3 N5 N1 N2 N3 N4
n1-2 1 0 0 0 0 0 0 0 0
n1-3 0 0 0 0 0 0 0 0 0
n1-4 1
n1-5 1
n1-6 0
n2-3 1
75

Enlaces “n”
Circuitos Existentes
Escenario SIN Redespacho (nuevos circuitos)
Escenario CON Redespacho (nuevos circuitos)
N0 N1 N2 N3 N5 N1 N2 N3 N4
n2-4 1
n2-5 0
n2-6 0 1 1 2 1
n3-4 0
n3-5 1 1 1
n3-6 0
n4-5 0
n4-6 0 1 1 2
n5-6 0
Costo (mlls ): 30 60 30 80 20 60 30
VP (mlls ): 50.1154 20.5113
5.1.4 Modelo dinámico considerando criterio “n-1”
La solución óptima encontrada para el escenario de generación 1 tiene un costo de
US$ 97.5 x 106 en valor presente (US$ 357 x 106 como suma aritmética. Para el
escenario 2, la solución óptima tiene un costo de US$ 41.3 x 106 en valor presente (US$
208 x 106 como suma aritmética). Las soluciones obtenidas son técnicamente factibles.
En la tabla 5.4 se muestran los resultados obtenidos y la cantidad de circuitos
adicionados en cada enlace.
Tabla 5.4 Resultados del modelo dinámico considerando el criterio n-1 (Fuente: elaboración propia)
Enlaces “n”
Circuitos Existentes
Escenario SIN Redespacho (nuevos circuitos)
Escenario CON Redespacho (nuevos circuitos)
N0 N1 N2 N3 N5 N1 N2 N3 N4
n1-2 1 0 0 0 0 0 0 0 0
n1-3 0 0 0 0 0 0 0 0 0
n1-4 1
n1-5 1
n1-6 0
n2-3 1
n2-4 1
n2-5 0
n2-6 0 1 1 1 1 1
n3-4 0
n3-5 1 1 1 1
n3-6 0 1 1 1
n4-5 0
n4-6 0 1 1 1 1 1
76

Enlaces “n”
Circuitos Existentes
Escenario SIN Redespacho (nuevos circuitos)
Escenario CON Redespacho (nuevos circuitos)
N0 N1 N2 N3 N5 N1 N2 N3 N4
n5-6 0 1
Costo (mlls ): 60 128 60 109 20 30 50 108
VP (mlls ): 97.5197 41.3385
5.1.5 Modelo dinámico considerando criterio “n-1” en enlaces radiales
La solución óptima encontrada para el escenario de generación 1 tiene un costo de
US$ 50.1 x 106 en valor presente (US$ 200 x 106 como suma aritmética); dicha solución
además es técnicamente factible. Para el escenario 2, la solución óptima tiene un costo
de US$ 20.5 x 106 en valor presente; sin embargo, no es técnicamente factible. La mejor
solución factible tiene un costo de US$ 52 x 106 en valor presente (US$ 110 x 106 como
suma aritmética), y corresponde al cuarto de menor costo. En la tabla 5.5 se muestran los
resultados obtenidos y la cantidad de circuitos adicionados en cada enlace.
Tabla 5.5 Resultados del modelo dinámico (Fuente: elaboración propia)
Enlaces “n”
Circuitos Existentes
Escenario SIN Redespacho (nuevos circuitos)
Escenario CON Redespacho (nuevos circuitos)
N0 N1 N2 N3 N5 N1 N2 N3 N4
n1-2 1 0 0 0 0 0 0 0 0
n1-3 0 0 0 0 0 0 0 0 0
n1-4 1
n1-5 1
n1-6 0
n2-3 1
n2-4 1
n2-5 0
n2-6 0 1 1 2 1
n3-4 0
n3-5 1 1 1
n3-6 0
n4-5 0
n4-6 0 1 1 2
n5-6 0
Costo (mlls ): 30 60 30 80 20 60 30
VP (mlls ): 50.1154 20.5113
77

5.2 Sistema IEEE 24 barras
Este sistema consta de 24 barras, 41 líneas, una demanda total de 8,550 MW, y se
pueden adicionar 5 líneas por corredor. La topología inicial es presentada en la figura 5.2,
y los datos eléctricos de este sistema pueden ser consultados en el apéndice A.2.
Figura 5.2 Sistema IEEE 24 barras: configuración inicial (Fuente: referencia [72])
Para el modelo dinámico se considera un horizonte de planeamiento de veinte (20)
años con tres (03) etapas intermedias: año 5, año 10, año 15. La demanda se ha
obtenido considerando una tasa de 4% anual y la generación se ha mantenido constante
en el período. Asimismo, para determinar el factor de actualización se considera una tasa
anual de 12%.
Los resultados obtenidos son:
78
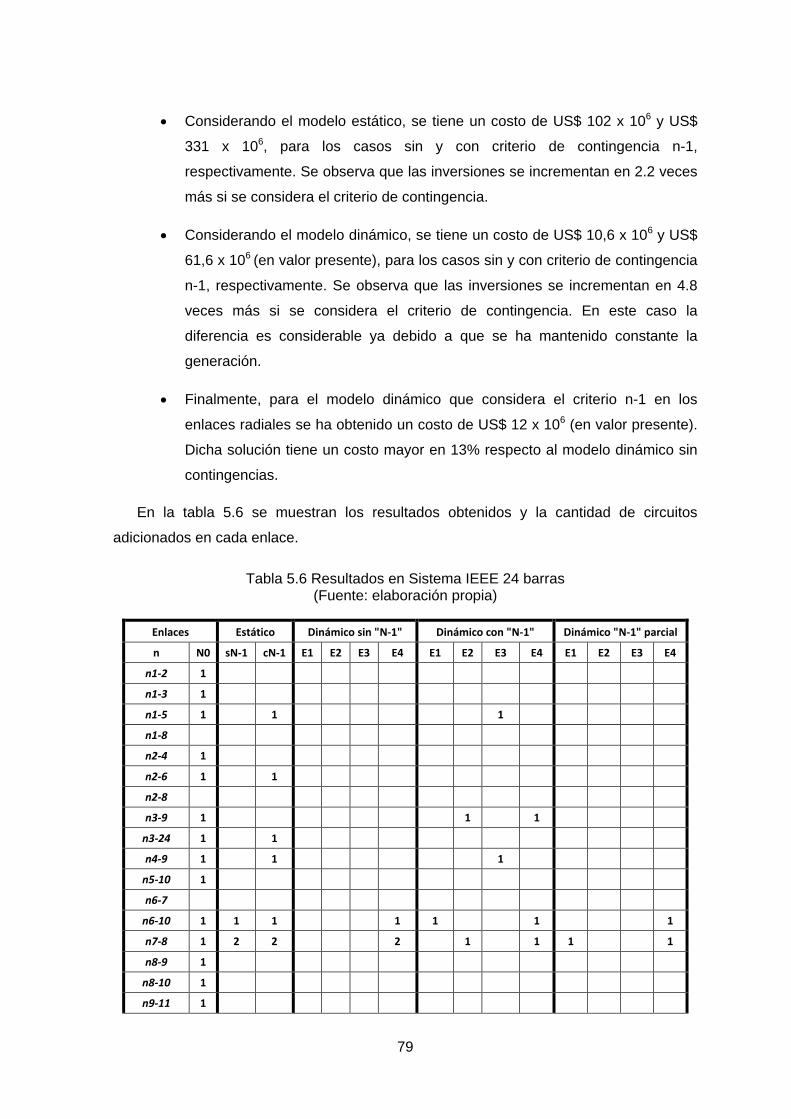
• Considerando el modelo estático, se tiene un costo de US$ 102 x 106 y US$
331 x 106, para los casos sin y con criterio de contingencia n-1,
respectivamente. Se observa que las inversiones se incrementan en 2.2 veces
más si se considera el criterio de contingencia.
• Considerando el modelo dinámico, se tiene un costo de US$ 10,6 x 106 y US$
61,6 x 106 (en valor presente), para los casos sin y con criterio de contingencia
n-1, respectivamente. Se observa que las inversiones se incrementan en 4.8
veces más si se considera el criterio de contingencia. En este caso la
diferencia es considerable ya debido a que se ha mantenido constante la
generación.
• Finalmente, para el modelo dinámico que considera el criterio n-1 en los
enlaces radiales se ha obtenido un costo de US$ 12 x 106 (en valor presente).
Dicha solución tiene un costo mayor en 13% respecto al modelo dinámico sin
contingencias.
En la tabla 5.6 se muestran los resultados obtenidos y la cantidad de circuitos
adicionados en cada enlace.
Tabla 5.6 Resultados en Sistema IEEE 24 barras (Fuente: elaboración propia)
Enlaces Estático Dinámico sin "N-1" Dinámico con "N-1" Dinámico "N-1" parcial
n N0 sN-1 cN-1 E1 E2 E3 E4 E1 E2 E3 E4 E1 E2 E3 E4
n1-2 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n1-3 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n1-5 1 0 1 0 0 0 0 0 0 1 0 0 0 0 0
n1-8 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n2-4 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n2-6 1 0 1 0 0 0 0 0 0 0 0 0 0 0 0
n2-8 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n3-9 1 0 0 0 0 0 0 0 1 0 1 0 0 0 0
n3-24 1 0 1 0 0 0 0 0 0 0 0 0 0 0 0
n4-9 1 0 1 0 0 0 0 0 0 1 0 0 0 0 0
n5-10 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n6-7 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n6-10 1 1 1 0 0 0 1 1 0 0 1 0 0 0 1
n7-8 1 2 2 0 0 0 2 0 1 0 1 1 0 0 1
n8-9 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n8-10 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n9-11 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
79

Enlaces Estático Dinámico sin "N-1" Dinámico con "N-1" Dinámico "N-1" parcial
n N0 sN-1 cN-1 E1 E2 E3 E4 E1 E2 E3 E4 E1 E2 E3 E4
n9-12 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n10-11 1 0 0 0 0 0 0 0 0 0 1 0 0 0 0
n10-12 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n11-13 1 0 0 0 0 0 0 0 0 0 1 0 0 0 0
n11-14 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n12-13 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n12-23 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n13-14 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0
n13-23 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n14-16 1 1 0 0 0 0 1 0 0 1 0 0 0 0 1
n14-23 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n15-16 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n15-21 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n15-24 1 0 1 0 0 0 0 0 0 0 0 0 0 0 0
n16-17 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n16-19 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n16-23 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n17-18 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n17-22 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n18-21 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n19-20 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n19-23 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n20-23 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0
n21-22 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Costo (mlls): 102 331 0 0 0 102 16 47 103 179 16 0 0 86
VP (mlls): 10.574 61.5857 11.9942
Del tabla se observa que las soluciones óptimas obtenidas en el modelo estático son
igual a los obtenidos en la literatura especializada [30, 64, 73, entre otros].
5.3 Sistema subtransmisión de Luz del Sur
A continuación se describe las premisas que fueron consideradas para modelar el
sistema de subtransmisión de Luz del Sur:
• El sistema existente está conformado por dos inyecciones en 500 kV (Chilca y
Planicie REP) y una en 220 kV a través de la línea Pomacocha – San Juan;
cinco (05) subestaciones 220 kV (San Juan, Chilca, Santa Rosa, Balnearios e
80
Industriales). Se considera también la inyección en 550 kV a través de la
futura S.E. Carapongo, prevista para el 2018 (año 05 en la modelación).
• Según lo establecido en la normatividad vigente, se han modelado el corto
mediano y largo plazo (años 05, 08, 10, 20 y 30).
• Para la modelación, se han introducido once (11) nodos de derivación en 220
kV a fin de optimizar el uso de los trazos existentes en el largo plazo y
aprovechar de este modo las redes aéreas.
• De los resultados obtenidos en la planificación de subestaciones, para el largo
plazo se tienen 18 futuras subestaciones 220/60/22,9/10 kV. Asimismo, para
esta simulación se ha considerado la necesidad de dos nuevas subestaciones
en 500 kV (NEW1 y NEW2).
• El sistema consta de 44 barras, 22 existentes al año 05 y 22 proyectadas al
año 30. Asimismo cuenta con 78 enlaces, 34 existentes (considera los
enlaces incluyendo los nodos de derivación) y 44 enlaces que se pueden
adicionar (se pueden adicionar 2 circuitos por cada enlace como máximo).
La topología inicial es presentada en la figura 5.3. En dicha figura se observa también
a las futuras subestaciones y futuros enlaces. Los datos eléctricos de este sistema
pueden ser consultados en el apéndice A.3.
81
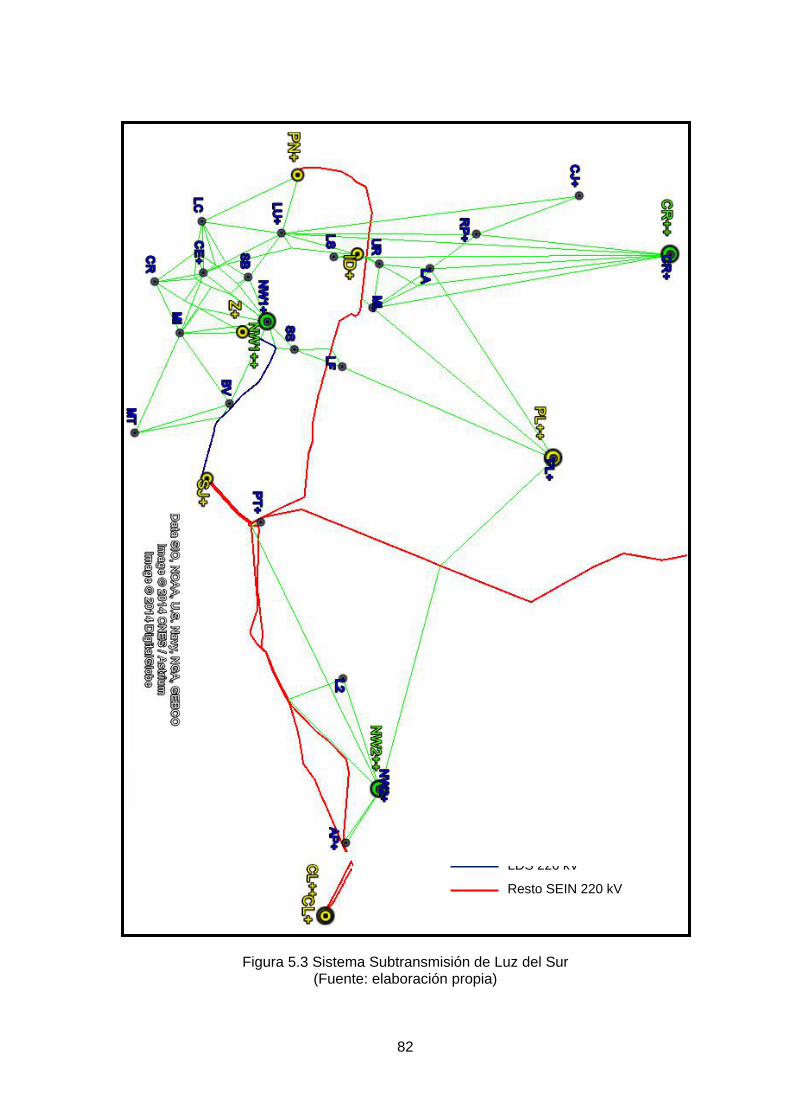
Figura 5.3 Sistema Subtransmisión de Luz del Sur (Fuente: elaboración propia)
LDS 220 kV
Nuevos enlaces 220 kV
Resto SEIN 220 kV
82

Los resultados obtenidos son:
• Considerando el modelo estático, para el año horizonte (año 30) se tiene un
costo de US$ 27,5 x 106 y US$ 58,8 x 106, para los casos sin y con criterio de
contingencia n-1, respectivamente. Se observa que las inversiones se
incrementan en 1.1 veces más si se considera el criterio de contingencia.
• Considerando el modelo dinámico, se tiene un costo de US$ 29,7 x 106 (en
valor presente), para los casos sin considerar el criterio de contingencia n-1.
• Finalmente, para el modelo dinámico que considera el criterio n-1 en los
enlaces radiales se ha obtenido un costo de US$ 35,8 x 106 (en valor
presente). Dicha solución tiene un costo mayor en 20% respecto al modelo
dinámico sin contingencias.
En la tabla 5.7 se muestran los resultados obtenidos y la cantidad de circuitos
adicionados en cada enlace.
Tabla 5.7 Resultados en Sistema Subtransmisión de Luz del Sur (Fuente: elaboración propia)
Enlaces Estático Dinámico sin "N-1" Dinámico con "N-1" parcial
n N0 sN-1 cN-1 E1 E2 E3 E4 E5 E1 E2 E3 E4 E5
PL++PL+ 1 0 0 0 0 0 0 0 0 0 0 0 0
CR++CR+ 1 0 0 0 0 0 0 0 0 0 0 0 0
CL++CL+ 1 0 0 0 0 0 0 0 0 0 0 0 0
NW1++NW1+ 0 1 1 1 0 0 0 0 1 0 0 0 0
NW2++NW2+ 0 1 1 1 0 0 0 0 1 0 0 0 0
PL+ML 0 0 0 0 0 0 0 1 0 0 0 0 0
PL+LF 0 0 0 0 0 0 0 1 0 0 0 0 1
PL+N3 2 0 0 0 0 0 0 0 0 0 0 0 0
PL+S5 0 0 0 0 0 0 0 0 0 0 0 0 0
PL+LA 0 0 0 0 0 0 0 0 0 0 0 1 0
CR+CJ+ 2 0 0 0 0 0 0 0 0 0 0 0 0
CR+RP+ 0 0 0 0 0 0 2 0 0 0 0 0 2
CR+LA 0 0 0 0 0 0 0 0 0 0 0 0 0
CR+ML 0 0 0 0 0 0 0 0 0 0 0 0 0
CL+S1 4 0 0 0 0 0 0 0 0 0 0 0 0
NW1+Z+ 0 0 1 0 1 0 0 0 0 1 0 0 0
NW1+CE+ 0 0 0 0 0 0 1 1 0 0 0 0 1
NW1+SB 0 0 1 0 0 0 1 0 0 0 0 2 0
NW1+N6 0 0 0 0 0 0 0 0 0 0 0 0 0
NW1+SS 0 0 0 0 0 0 0 0 0 0 0 0 0
83

Enlaces Estático Dinámico sin "N-1" Dinámico con "N-1" parcial
n N0 sN-1 cN-1 E1 E2 E3 E4 E5 E1 E2 E3 E4 E5
NW1+MI 0 0 0 0 1 0 0 0 0 2 0 0 0
NW2+AP+ 0 1 2 0 0 0 1 1 0 0 0 1 0
NW2+L2 0 0 0 0 0 0 1 0 0 0 0 1 0
NW2+S1 0 0 1 0 0 0 0 0 0 0 0 0 0
NW2+S2 0 0 0 0 0 0 0 0 0 0 0 0 0
NW2+S5 0 0 0 0 0 0 0 2 0 0 0 0 2
Z+MI 0 0 0 0 0 0 0 0 0 0 0 0 0
Z+CE+ 0 0 0 0 0 0 0 0 0 0 0 0 0
Z+CR 0 0 0 0 0 0 0 0 0 0 0 0 0
Z+N6 2 0 0 0 0 0 0 0 0 0 0 0 0
SJ+N5 2 0 0 0 0 0 0 0 0 0 0 0 0
SJ+S3 8 0 0 0 0 0 0 0 0 0 0 0 0
ID+LS 0 0 1 0 0 0 1 0 0 0 0 2 0
ID+UR 0 0 0 0 0 0 0 0 0 0 0 0 0
ID+LU+ 0 2 1 2 0 0 0 0 2 0 0 0 0
ID+N1 2 0 0 0 0 0 0 0 0 0 0 0 0
ID+N3 2 0 0 0 0 0 0 0 0 0 0 0 0
PN+CJ+ 2 0 0 0 0 0 0 0 0 0 0 0 0
PN+LC 0 0 0 0 0 0 0 0 0 0 0 0 0
PN+N1 2 0 0 0 0 0 0 0 0 0 0 0 0
CJ+RP+ 0 0 0 0 0 0 0 0 0 0 0 1 0
AP+S1 0 1 2 1 0 0 0 0 2 0 0 0 0
LU+LC 0 0 0 0 0 0 1 0 0 0 0 1 0
LU+LS 0 0 1 0 0 0 0 0 0 0 0 0 0
LU+SB 0 0 1 0 0 0 0 0 0 0 0 0 0
CE+LC 0 0 0 0 0 0 1 0 0 0 0 1 0
CE+CR 0 0 0 0 0 0 1 0 0 0 0 1 0
CE+MI 0 0 0 0 0 0 0 0 0 0 0 0 0
PT+S3 0 0 0 0 0 1 0 1 0 0 2 0 0
RP+LA 0 0 0 0 0 0 1 0 0 0 0 1 0
BVMI 0 0 0 0 0 0 0 0 0 0 0 0 0
BVMT 0 0 0 0 0 0 0 0 0 0 0 0 0
BVN5 0 0 0 0 0 0 1 0 0 0 0 2 0
CRMI 0 0 0 0 0 0 0 0 0 0 0 1 0
L2S2 0 0 0 0 0 0 0 0 0 0 0 1 0
LAN3 0 0 0 0 0 0 0 0 0 0 0 0 0
LAUR 0 0 0 0 0 0 0 0 0 0 0 0 0
LAML 0 0 0 0 0 0 0 0 0 0 0 0 0
LCSB 0 0 0 0 0 0 0 0 0 0 0 0 0
LFSS 0 0 0 0 0 0 0 0 0 0 0 0 0
LFN4 0 0 0 0 0 0 0 1 0 0 0 0 1
MIMT 0 0 0 0 0 0 0 0 0 0 0 0 0
84

Enlaces Estático Dinámico sin "N-1" Dinámico con "N-1" parcial
n N0 sN-1 cN-1 E1 E2 E3 E4 E5 E1 E2 E3 E4 E5
MLUR 0 0 0 0 0 0 0 0 0 0 0 0 0
MLN2 0 0 0 0 0 0 1 0 0 0 0 2 0
MLN3 0 0 0 0 0 0 0 0 0 0 0 0 0
MTN5 0 0 0 0 0 0 1 0 0 0 0 2 0
SSN6 0 0 0 0 1 0 0 0 0 2 0 0 0
SSN4 0 0 0 0 0 0 0 1 0 0 0 0 1
URN1 0 0 0 0 0 1 0 0 0 0 2 0 0
URN3 0 0 0 0 0 0 0 0 0 0 0 0 0
N1N2 2 0 0 0 0 0 0 0 0 0 0 0 0
N2N4 2 0 0 0 0 0 0 0 0 0 0 0 0
N4S4 2 0 0 0 0 0 0 0 0 0 0 0 0
N5N6 2 0 0 0 0 0 0 0 0 0 0 0 0
S1S2 4 0 0 0 0 0 0 0 0 0 0 0 0
S2S3 4 0 0 0 0 0 0 0 0 0 0 0 0
S3S4 4 0 0 0 0 0 0 0 0 0 0 0 0
S4S5 2 0 0 0 0 0 0 0 0 0 0 0 0
Costo (mlls $): 27.5 58.8 26.3 10.4 2.07 84.6 35.6 26.3 16.5 4.13 112 36.4
VP (mlls $): 29.7479 35.7542
85

CAPÍTULO VI APLICACIÓN DE METODOLOGÍA PROPUESTA AL SISTEMA DE SUBTRANSMISION
DE LUZ DEL SUR
En este capítulo se desarrolla la metodología propuesta al sistema de subtransmisión
de Luz del Sur.
6.1 Sistema de subtransmisión de Luz del Sur
El sistema está conformado por líneas de transmisión de 220 y 60 kV, subestaciones
de 220/60 kV y 60/22,9/10 kV. A diferencia del análisis efectuado en el capítulo V, para
aplicar la metodología propuesta en esta tesis se desarrolla la planificación de la
subtransmisión incluyendo la red de 60 kV. A continuación se describe las premisas
consideradas:
• El sistema existente está conformado por dos inyecciones en 500 kV (Chilca y
Planicie REP) y una en 220 kV a través de la línea Pomacocha – San Juan;
cinco (05) subestaciones 220 kV (San Juan, Chilca, Santa Rosa, Balnearios e
Industriales).
• Según lo establecido en la normatividad vigente, se han modelado el corto
mediano y largo plazo. En la primera fase se modela los años 05, 08, 10, 20 y
30. En la segunda fase, se modelan los años 01, 02, 03, 04, 05, 08 y 10. El
año base corresponde al año 2013.
• Se considera también la inyección en 550 kV a través de la futura S.E.
Carapongo, prevista para el 2018 (año 05). Asimismo, se considera las líneas
220 kV Carapongo – Santa Rosa (año 05) y Planicie REP – Industriales (Año
04).
• Para la modelación, se han introducido once (11) nodos en 220 kV y trece
(13) nodos en 60 kV a fin de optimizar el uso de los trazos existentes en el
largo plazo y aprovechar de este modo las redes aéreas.

• De los resultados obtenidos en la planificación de subestaciones, para el largo
plazo se tienen 18 futuras subestaciones 220/60/22,9/10 kV y siete (07)
futuras subestaciones en 60/22,9/10 kV.
• El sistema consta de 98 barras, 65 existentes al año 05 (de los cuales 24 son
nodos) y 33 proyectadas al año 30. Asimismo cuenta con 156 enlaces, 71
existentes (considera los enlaces incluyendo los nodos de derivación) y 85
enlaces que se pueden adicionar (se pueden adicionar 2 circuitos por cada
enlace como máximo).
• Para el caso de futuras inyecciones, se ha considerado la necesidad de dos
nuevas subestaciones en 500 kV, una ubicada en la zona centro de Luz del
Sur (NEW1), otra ubicada en la zona sur (NEW2) y una tercera en la
subestación San Juan. En cada una se considera una inyección máxima de
4x600 = 2400 MVA.
La topología inicial es presentada en la figura 6.1. Los datos eléctricos de este
sistema pueden ser consultados en el apéndice A.4.
Figura 6.1 y Figura 6.2
(Fuente: elaboración propia)
87

Figura 6.1 Sistema Subtransmisión de Luz del Sur: Configuración Actual
LDS 220 kV
LDS 60 kV
Resto SEIN 220 kV
88

Figura 6.2 Sistema Subtransmisión de Luz del Sur: Alternativa de Enlaces
60 kV
220 kV
89

6.2 Determinación de planes de expansión
Para determinar los planes de expansión se desarrolla un modelo de planificación
multietapa que considera el criterio de confiabilidad n-1 en los enlaces radiales;
asimismo, se considera las opciones: futuros “nodos de inyección” y/o de interconexión,
capacidad de inyección en los “nodos” existentes y futuros; y todos los posibles enlaces
entre las subestaciones nuevas y proyectadas. Para un mejor análisis del corto plazo, e la
modelación se ha considerado los años 03, 05, 08, 10 y 30.
Las opciones consideradas se obtienen combinando las inyecciones en 500 kV
existentes en el corto plazo (Chilca, Planicie REP y Carapongo) y las futuras (NEW1,
NEW2 y San Juan), en cada una se considera una inyección máxima de 2x600 = 1200
MVA.
Para el presente análisis se ha obtenido 49 planes de expansión.
6.3 Definición de escenarios
Previamente, para definir los futuros se considera lo siguiente:
• Proyección de demanda, un escenario pesimista (-1%) y un escenario
optimista (+1%), en total cinco (03) incluyendo el base.
• Precio de generación, un escenarios de incremento de precios en10%, en
total tres (02) incluyendo el base.
• Costo de compensaciones, un escenario de incremento de dicho costo a 1,0
$/kWh, en total tres (02) incluyendo el base.
Según lo indicado en los puntos anteriores, en total se tienen 54 futuros (3x3x2).
Luego, considerando los 49 planes de la tabla 6.1 y los 12 futuros se tiene en total
588 escenarios.
Utilizando el procedimiento descrito en el capítulo IV, para cada uno de dichos
escenarios se determina las pérdidas, la energía no suministrada y las inversiones
ineficientes. A partir de dichos resultados se determinan los atributos de cada plan
asociado a un futuro: Valor Presente de Inversiones (VPI), está expresado en US$;
Incremento de la Tarifa Eléctrica (ITE), expresado en US$/MWh; y, Costo Total de
Ineficiencias (CTI), expresado en US$.
90

6.4 Análisis trade-off
En las figuras 6.3, 6.4 y 6.5 se muestran las curvas trade-off que relaciona los
atributos VPI vs ITE, VPI vs CTI y ITE vs CTI, respectivamente.
Figura 6.3 Atributos VPI vs ITE
(Fuente: elaboración propia)
Figura 6.4 Atributos VPI vs CTI
0.0
5.0
10.0
15.0
20.0
25.0
56.0 58.0 60.0 62.0 64.0 66.0 68.0
ITE
VPI
VPI vs ITE
0.0
5.0
10.0
15.0
20.0
25.0
56.0 58.0 60.0 62.0 64.0 66.0 68.0
CTI
VPI
VPI vs CTI
91
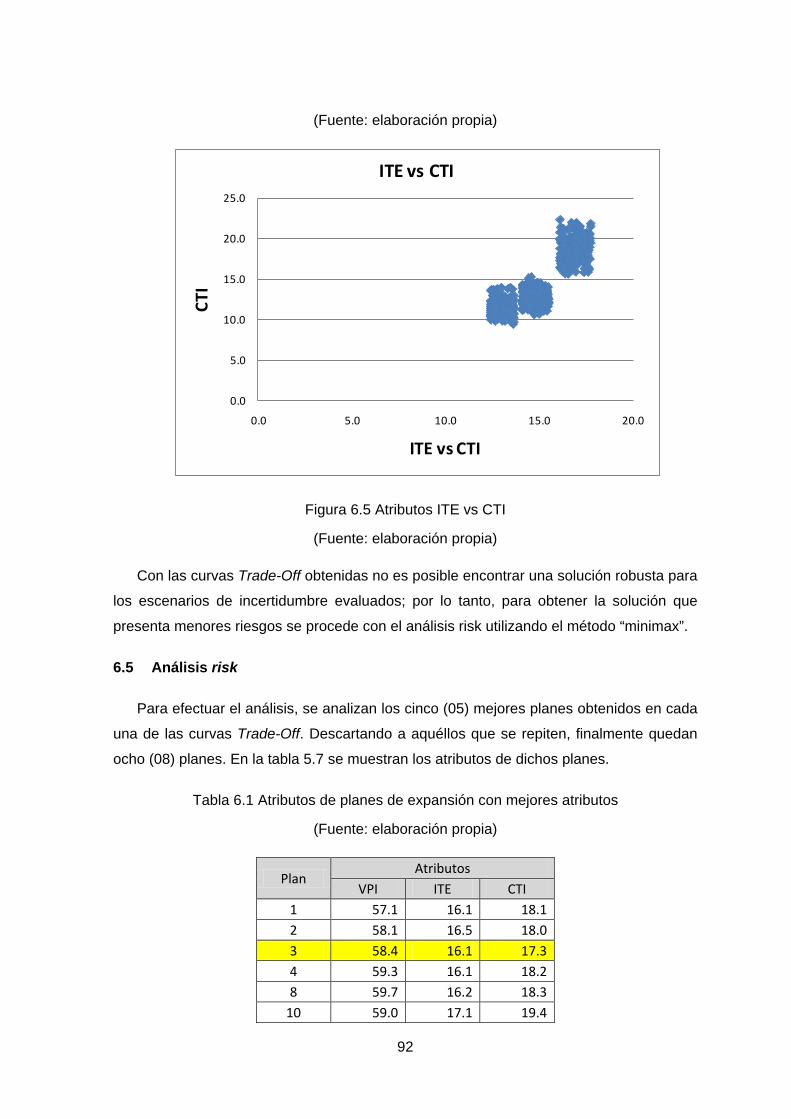
(Fuente: elaboración propia)
Figura 6.5 Atributos ITE vs CTI
(Fuente: elaboración propia)
Con las curvas Trade-Off obtenidas no es posible encontrar una solución robusta para
los escenarios de incertidumbre evaluados; por lo tanto, para obtener la solución que
presenta menores riesgos se procede con el análisis risk utilizando el método “minimax”.
6.5 Análisis risk
Para efectuar el análisis, se analizan los cinco (05) mejores planes obtenidos en cada
una de las curvas Trade-Off. Descartando a aquéllos que se repiten, finalmente quedan
ocho (08) planes. En la tabla 5.7 se muestran los atributos de dichos planes.
Tabla 6.1 Atributos de planes de expansión con mejores atributos
(Fuente: elaboración propia)
Plan Atributos
VPI ITE CTI 1 57.1 16.1 18.1 2 58.1 16.5 18.0 3 58.4 16.1 17.3 4 59.3 16.1 18.2 8 59.7 16.2 18.3
10 59.0 17.1 19.4
0.0
5.0
10.0
15.0
20.0
25.0
0.0 5.0 10.0 15.0 20.0
CTI
ITE vs CTI
ITE vs CTI
92

Plan Atributos
VPI ITE CTI 22 57.7 16.7 20.0 48 65.0 16.2 18.0
Luego, utilizando el método “minimax” se determina a aquel plan que minimiza el
máximo arrepentimiento. Los resultados se muestran en las tablas 7.4 y 7.5.
Tabla 6.2 Análisis Risk
(Fuente: elaboración propia)
Plan Máximo Arrepentimiento (%) MINIMAX
(Es5) VPI ITE CTI TOTAL 1 0% 5% 5% 5% 2 2% 2% 4% 8% 8% 3 2% 2% 2% 4 4% 5% 9% 9% 8 4% 0% 6% 11% 11%
10 3% 6% 12% 22% 22% 22 1% 4% 15% 20% 20% 48 14% 1% 4% 18% 18%
Tabla 6.3 Análisis Risk (todos los escenarios)
(Fuente: elaboración propia)
Plan Máximo Arrepentimiento (%)
Es1 Es2 Es3 Es4 Es5 Es6 Es7 Es8 Es9 Es10 Es11 Es12 1 5% 5% 5% 5% 5% 4% 5% 5% 5% 5% 5% 4% 2 8% 8% 8% 8% 8% 8% 8% 8% 8% 8% 8% 8% 3 2% 2% 2% 2% 2% 2% 2% 2% 2% 2% 2% 2% 4 6% 6% 7% 9% 9% 10% 6% 6% 7% 9% 8% 10% 8 8% 8% 9% 11% 11% 12% 8% 8% 8% 10% 10% 12%
10 20% 20% 21% 22% 22% 22% 20% 20% 20% 22% 21% 22% 22 17% 17% 18% 20% 20% 22% 17% 17% 17% 20% 19% 21% 48 17% 17% 18% 19% 18% 19% 17% 17% 18% 19% 18% 19%
De los resultados obtenidos se muestra que el plan con menor costo de inversión
corresponde al plan de expansión 1 y tiene un costo de 57.1 x 106 US$. Asimismo, el plan
con menores riesgos debido a incertidumbres consideradas corresponde al plan de
expansión 3, el costo de dicho plan es de 58.4 x 106 US$. En la tabla 7.5 se muestran los
resultados obtenidos por etapas.
93

6.6 Resultados
En la tabla 7.5 se muestran los resultados del plan de expansión de corto, mediano y
largo plazo del sistema de subtransmisión de Luz del Sur (por etapas). Adicionalmente,
en dicha tabla se muestran los resultados obtenidos en el plan de expansión con
menores costos de inversión (para fines comparativos).
Tabla 6.4 Análisis Risk
(Fuente: elaboración propia)
Enlaces "n"
PLAN EXPANSIÓN 1 PLAN EXPANSIÓN 3 N1 N2 N3 N4 N5 N1 N2 N3 N4 N5
SJ++SJ+ 1 0 0 0 1
NW1++NW1+ 1 0 0 0 1
NW2++NW2+ 1 0 0 0 1
PL+S5 0 0 0 0 0 0 0 0 0 1
PL+CG 1 0 0 0 0 1 0 0 0 0
CP+RP+ 0 0 0 0 1 0 0 0 0 1
CP+CP 1 0 0 0 0 1 0 0 0 0
NW1+Z+ 0 0 0 0 2 0 0 0 0 3
NW1+CE+ 0 1 0 0 0 0 0 0 0 0
NW1+SB 0 0 0 0 1 0 0 0 0 1
NW2+AP+ 0 0 0 0 0 0 0 0 0 1
NW2+L2 0 0 0 0 0 0 0 0 0 1
NW2+S5 0 0 0 0 0 0 0 0 0 1
Z+MI 0 0 1 0 0 0 0 1 0 0
Z+CR 0 0 0 0 0 0 0 0 0 1
ID+LS 0 0 0 0 2 0 0 0 0 2
ID+LU+ 0 0 0 0 0 0 1 0 0 0
CJ+CJ 0 0 0 0 1 0 0 0 0 1
AP+S1 0 0 1 0 0 0 0 1 0 0
AP+AP 0 0 1 0 0 0 0 1 0 0
LU+LS 0 0 1 0 0 0 0 2 0 0
LU+LU 0 0 1 0 0 0 1 0 0 0
CE+LC 0 0 0 0 1 0 0 0 0 1
CE+CR 0 0 0 0 2 0 0 0 0 1
CE+MI 0 0 1 0 0 0 0 1 0 0
CE+CE 0 1 0 0 0 0 0 0 0 0
PT+S3 0 0 0 2 0 0 0 0 2 0
PT+PT 0 0 0 0 1 0 0 0 0 1
RP+LA 0 0 0 0 2 0 0 0 0 2
RP+RP 0 0 0 0 1 0 0 0 0 1
BJ+BJ 1 0 0 0 0 1 0 0 0 0
94

Enlaces "n"
PLAN EXPANSIÓN 1 PLAN EXPANSIÓN 3 N1 N2 N3 N4 N5 N1 N2 N3 N4 N5
BVN5 0 0 0 0 2 0 0 0 0 2
L2S2 0 0 0 0 2 0 0 0 0 1
LCSB 0 0 0 0 1 0 0 0 0 1
LFN4 0 0 0 0 2 0 0 0 0 2
MLN2 0 0 0 0 2 0 0 0 0 2
MTN5 0 0 0 0 2 0 0 0 0 2
SSN6 0 0 2 0 0 0 0 2 0 0
SSN4 0 0 0 0 1 0 0 0 0 0
URN1 0 0 0 2 0 0 0 0 2 0
CGMN 0 2 0 0 0 0 1 0 0 1
CPNA 2 0 0 0 0 2 0 0 0 0
CPHY 0 0 0 2 0 0 0 0 2 0
APPR 0 0 1 0 2 0 0 1 0 2
MND10 0 0 0 0 1 0 1 0 0 0
CJD6 1 0 0 0 0 1 0 0 0 0
ETD11 0 2 0 0 0 0 2 0 0 0
LUD8 0 0 1 0 0 0 0 0 1 0
LUC 0 0 0 0 0 0 1 0 0 1
LUCE 0 0 0 0 0 0 0 0 0 1
PTD13 0 0 0 0 1 0 0 0 0 1
PTD14 0 0 0 0 1 0 0 0 0 1
CESI 0 1 0 0 0 1 0 0 0 0
CEC 1 0 0 0 0 1 2 0 0 0
CED2 1 0 0 0 0 0 0 0 0 1
RPD9 0 0 0 0 1 0 0 0 0 1
RSD7 0 0 2 0 0 0 0 2 0 0
Costo (mlls $): 9.21 42.9 50.8 5.6 118 9.89 42.3 48.6 7.64 159
VP (mlls $): 57.13024363 58.42060593
En la figura 6.6 se muestra los resultados gráficamente.
(Fuente de Figura 6.6: elaboración propia)
95

Figura 6.6 Plan de expansión del sistema de subtransmisión de Luz del Sur
96

CONCLUSIONES
1. La propuesta desarrollada en este presente trabajo contribuye con poner a
disposición una metodología para la definición de los planes de inversión en los sistemas
de subtransmisión bajo un esquema multiobjetivo, considerando adicionalmente, respecto
a los métodos tradicionales, los riesgos e incertidumbres.
2. Las soluciones parciales obtenidas en desarrollo de la metodología propuesta
fueron satisfactorios y validados con resultados obtenidos en la literatura especializada.
Se ha verificado que el modelo multietapa es más eficiente que el modelo estático;
asimismo, la inclusión del criterio n-1 eleva considerablemente los costos de inversión.
Bajo dicho contexto, en este trabajo se propone incluir el criterio n-1 en los enlaces
radiales y/o en aquellos enlaces que el planificador considera necesario.
3. La metodología propuesta permite evaluar escenarios futuros como la proyección
de demanda, variaciones de precios en los cables, conductores de alta temperatura,
precio de generación, factor de carga, tasas de falla, entre otros; variables que en el
planeamiento tradicional se mantienen constante.
4. Un aspecto importante que puede ser evaluado eficazmente mediante la aplicación
de la metodología propuesta, es la determinación de los futuros nodos de inyección y/o
de interconexión con el sistema. Este punto es de mucha importancia y representa un
insumo base para los estudios de planificación de la transmisión y la generación.
Caso Luz del Sur:
5. El modelo de optimización desarrollado considera un modelo dinámico de cinco
(05) etapas y el criterio n-1 para el caso de enlaces radiales. Para el tamaño del sistema
se han obtenido soluciones en intervalos de tiempo de 5 a 10 minutos para un plan de
expansión. Al incrementar el número de etapas a seis (06), el tiempo se incrementa de 20
a 30 minutos. La aplicación del criterio n-1 a todos los circuitos no pudo ser resuelto
debido a la magnitud del problema (más de 106 ecuaciones). Sin embargo, si es posible
considerar dicho criterio a algunos enlaces, por ejemplo a aquéllos que provienen de los
nodos de inyección.
97

6. Para el caso evaluado, la mayoría de planes de expansión obtenidos presentan
soluciones similares en el corto y mediano plazo (año 03, 05, 08 y 10). Por lo se
recomienda su evaluación en dos fases: en la primera, un modelo de mediano y largo
plazo para determinar opciones de enlaces a considerar en la segunda fase (se sugiere
evaluar los años 10, 20 y 30); en la segunda, un modelo de corto y mediano plazo (años
01, 03, 05, 08 y 10). Esta variante permitirá obtener una gran cantidad de planes de
expansión en el corto y mediano plazo, los necesarios para un mejor análisis del trade-
off/risk. El incrementa del número de etapas en la primera fase, aumenta los tiempos en
el proceso de optimización; sin embargo, no incrementa el abanico de soluciones en el
mediano plazo. Para la segunda fase, para reducir los tiempos, se recomienda evaluar
aquéllos años que presenten nuevas subestaciones de potencia.
98

APORTES
1. En este proyecto, se pone a disposición una metodología que puede ser
implementada en el VBA de Excel. Asimismo, ésta se puede enlazar con los solver libre
CBC y/o GLPK para resolver los problemas de optimización y el software libre OCTAVE
para los análisis de flujo de carga. Con dicha herramienta se obtienen resultados en
tiempos muy cortos los cuales son de gran ayuda en los procesos de planificación.
Debido a que los recursos de software no tienen costo, la metodología propuesta puede
ser implementada fácilmente por las empresas de distribución y/o el organismo regulador,
con la finalidad de contar con una herramienta útil para la definición de los planes de
inversión en la subtransmisión.
2. Los modelos de optimización desarrollados en esta tesis (modelo estático,
dinámico y con contingencias) asociados a un algoritmo de flujo de potencia, pueden ser
utilizados para determinar la planificación de inversiones en los sistemas de
subtransmisión en cumplimiento de lo establecido en la normatividad vigente. Un aporte
adicional de este proyecto consiste en incluir el análisis de riesgos e incertidumbres.
3. El desarrollo de este proyecto pretende formar parte de una base para futuros
desarrollos y estudios de investigación en la planificación de inversiones de los sistemas
de subtransmisión.
99

RECOMENDACIONES
1. Una etapa previa a la modelación de un sistema real y que es muy importante para
el desarrollo de la expansión de la subtransmisión es “modelar apropiadamente las redes
existentes”; es decir, no debe ser fijo entre dos subestaciones existentes debido a que en
la práctica real, la configuración es dinámica y puede variar en el tiempo con el ingreso
futuras subestaciones de potencia. Por lo tanto, para la modelación se recomienda
adicionar “nodos de derivación” que permitan reconfigurar la red existente y futura a fin de
aprovechar un mejor uso de las redes existentes (mayormente aéreas) y obtener planes
de expansión con menores costos.
2. Para tener una visión integral de la subtransmisión se recomienda complementar el
método de proyección espacial de la demanda a nivel subestaciones de distribución
descrito en el apéndice B (considera un crecimiento vertical), incluyendo el crecimiento
horizontal a través de las densidades de carga.
3. Para evaluar alternativas de cambio de tensión en la subtransmisión se debe
evaluar previamente la planificación de subestaciones, luego continuar con el desarrollo
según lo descrito en la metodología propuesta.
4. Finalmente, se recomienda que en los proceso tarifarios correspondientes a la
fijación de planes de inversión en los sistemas de subtransmisión se utilice la
metodología propuesta en esta tesis.
100

BIBLIOGRAFIA
1. Alguacil N., Motto A. L., Conejo A. J. (2003). “Transmission expansion planning: a
mixed-integer lp approach”. IEEE Transactions on Power Systems, v. 18, n. 3, p.
1070–1077.
2. Bent R., Toole G. L., Berscheid A. (2012). “Transmission network expansion
planning with complex power flow models”. IEEE Transactions on Power Systems,
v. 27, n. 2, p. 904–912.
3. Binato S. (2000). “Expansão Ótima de Sistemas de Transmissão Através de
Decompocição de Benders e Técnicas de Planos Cortantes”, Tese de doutorado,
UFRJ. URL disponible en: http://www.psr-
inc.com.br/portal/psr_pt_BR/iframe.html?altura=4000&url=/app/teses.aspx
4. Binato S., Oliveira G., Araujo J. (2001). “A greedy randomized adaptive search
procedure for transmission expansion planning”. IEEE Transactions on Power
Systems, v. 16, n. 2, p. 247–253.
5. Cámac D., Bastidas R., Nadira R.; Dortolina C., Merrill H. M. (2010).
“Transmission planning criteria and their application under uncertainty”. IEEE
Transactions on power systems, v. 25, n. 4, p. 1996–2003.
6. Choi J., Mount T. D., Thomas, R. J. (2007). “A transmission expansion planning
using contingency criteria”. IEEE Transactions on Power Systems, v. 22, n. 4, p.
2249–2261.
7. Contreras J., Wu F. (1999). “Coalition formation in transmission expansion
planning”. IEEE Transactions on Power Systems, v. 14, n. 3, p. 1144–1152.
8. Collantes R. (2010). “Análisis de Mejora de la Confiabilidad de los Sistemas de
Distribución Eléctrica de Alta Densidad de Carga”. PP 134.
101

9. Edelnor (2002). “Propuesta de Tarifas y Compensaciones para Sistemas
Secundarios de Transmisión de Edelnor”. URL disponible en:
http://www.osinergmin.gob.pe/
10. Edelnor (2009). “Propuesta de Tarifas y Compensaciones para Sistemas
Secundarios de Transmisión y Complementarios de Transmisión, correspondiente
al Área de Demanda 6”. URL disponible en: http://www.osinergmin.gob.pe/
11. Edelnor (2013). “Propuesta de Plan de Inversiones en Transmisión,
correspondiente al Área de Demanda 6”. URL disponible en:
http://www.osinergmin.gob.pe/
12. Electrocentro, Electronorte, Electronoroeste y Hidrandina. (2002). “Propuesta
de Tarifas y Compensaciones para Sistemas Secundarios de Transmisión”. URL
disponible en: http://www.osinergmin.gob.pe/
13. Escobar A. H. (2008). “Análise críıtica de aspectos de modelagem matemática no
planejamento da expansao a longo prazo de sistemas de transmissao”. Tese
(Doutorado) — Universidade Estadual Paulista Julio de Mesquita Filho - UNESP,
Campus de Ilha Solteira. URL disponible en:
http://acervodigital.unesp.br/handle/unesp/242093
14. Escobar A. H., Gallego R. A., Romero R. A. (2004). “Multistage and coordinated
planning of the expansion of transmission systems”. IEEE Transactions on Power
Systems, v. 19, n. 2, p. 735–744.
15. Escobar A. H. (2002). “Planeamiento dinámico de la expansión de sistemas de
transmisión usando algoritmos combinatoriales”. Dissertacao (Mestrado) -
Universidad Tecnológica de Pereira, Pereira. URL disponible en:
http://www.utp.edu.co/~aescobar/PlaneamientoDinamico.pdf
16. Escobar A. H., Romero R. A., Gallego R. A. (2008). “Transmission network
expansión planning considering multiple generation scenarios”. IEEE/PES
Transmission and Distribution Conference and Exposition: Latin America, p. 1–6.
17. Escobar A. H., Romero R. A., Gallego R. A. (2010). “Modelos usados en el
planeamiento de la expansión a largo plazo de sistemas de transmisión de energía
eléctrica”. Risaralda - Pereira: Universidad Tecnológica de Pereira, Colombia. PP
179.
102

18. Fan H., Gao L., Cheng H., Zhong Zhang, J. (2011). “Study on transmission
network expansion planning considering uncertainties”. Power Engineering and
Automation Conference (PEAM), IEEE Transactions on Power Systems, v. 3, p. 82–
85.
19. Fang R., Hill D. (2003). “A new strategy for transmission expansion in competitive
electricity markets”. IEEE Transactions on Power Systems, v. 18, n. 1, p. 374–380.
20. Fang R. S., David A. K. (1999). “Transmission congestion management in an
electricity market”. IEEE Transactions on Power Systems, v. 14, n. 3, p. 877–883.
21. Fisher E. B., O’Neill R. P., Ferris M. C. (2008). “Optimal transmission switching”.
IEEE Transactions on Power Systems, v. 23, n. 3, p. 1346–1355.
22. Gallego L. A. (2005). “Planeamiento de la expansión de redes de transmisión de
energía eléctrica considerando contingencias”. Dissertacao (Mestrado) -
Universidad Tecnológica de Pereira, Pereira. URL disponible en:
http://www.utp.edu.co/~aescobar/PlaneamientoContingencias.pdf
23. Gallego R., Monticelli A., Romero R. (2000). “Tabu search algorithm for network
synthesis”. IEEE Transactions on Power Systems, v. 15, n. 2, p. 490–495.
24. Gallego R. A. (1997). “Planejamento a longo prazo de sistemas de transmisao
usando técnicas de otimizacao combinatorial”. Tese (Doutorado) - FEEC DSEE,
Universidade Estadual de Campinas, Campinas. URL disponible en:
http://www.feis.unesp.br/#!/departamentos/engenharia-eletrica/pesquisas-e-
projetos/lapsee/producao-bibliografica/teses-de-doutorado/
25. Gallego R. A., Romero R., Escobar A. (2000). “Static planning of colombian´s
transmission system using genetic algorithms”. In: Proceeding 16th International
Conference CAD/CAM. Trinidad & Tobago. URL disponible en:
http://www.utp.edu.co/~planeamiento/prod_aca/articulos/statical_planning_colombia
26. Garver L. L. (1970). “Transmission network estimation using linear programming”.
IEEE Transactions on Power Apparatus and Systems, PAS-89, n. 7, p. 1688–1697.
27. Gómez G. A. (2008). “Algoritmos GRASP y simulated annealing como
inicializadores de Branch and Bound en la solución de planeamiento estático de
sistemas de transmisión”. Dissertacao (Mestrado) - Universidad Tecnológica de
103

Pereira, Colombia. URL disponible en:
http://www.utp.edu.co/~aescobar/PlaneamientoBB_GRASP_SA.pdf
28. Granville S., Pereira M. V. F. (1985). "Analysis of the Linearized Power Flow Model
in Benders Decomposition", Epri-report, research Project Stanford University,
Febrero 1985, pp. 2473-2479.
29. Haffner S. O. (2000). “Planejamento da expansao dos sistemas elétricos no
contexto de um ambiente competitivo”. Tese (Doutorado) - Universidade Estadual
de Campinas, Campinas. URL disponible en:
http://www.feis.unesp.br/#!/departamentos/engenharia-eletrica/pesquisas-e-
projetos/lapsee/producao-bibliografica/teses-de-doutorado/
30. Haffner S., García, A., Romero, R. (2000). “Branch and bound algorithm for
transmission system expansion planning using a transportation model”. Proceedings
of the IEEE - Generation, Transmission and Distribution, v. 147, n. 3, p. 149–156.
31. Haffner M.A., García A. V., Romero R. (2001). "Specialized Branch and Bound
Algorithm for Transmission Network Expansion Planning", IEEE Proceedings of
Generation, Transmission and Distribution, v. 148, n. 5, pp. 482-488.
32. Junior H. de F. (2005). “Uma nova metaheurística para problemas combinatórios
aplicada ao planejamento da expansao de sistemas de transmissao de energia
elétrica”. Tese (Doutorado) —Universidade Federal do Rio de Janeiro, COPPE.
URL disponible en: http://www.pee.ufrj.br/teses/textocompleto/2005090251.pdf
33. Junior I. de J. S. (2005). “Planejamento da expansao de sistemas de transmissao
considerando seguranca e planos de programacao da geracao”. Tese (Doutorado) -
Universidade Estadual de Campinas, Campinas. URL disponible en:
http://www.feis.unesp.br/#!/departamentos/engenharia-eletrica/pesquisas-e-
projetos/lapsee/producao-bibliografica/teses-de-doutorado/
34. Kaltenbatch J. C., Person J., Gehrig E. H. A. (1970). “Mathematical optimization
technique for the expansion of electrical power transmission systems”. IEEE
Transactions on Power Apparatus and Systems, PAS 89, p. 113–119.
35. Kwang Y., Lee and Mohamed A., El-Sharkawi (2008). “Modern heuristic
optimization: techniques theory and applications to power systems”. PP 616.
104

36. Latorre G., Cruz R., Areiza J. (2003). “Classification of publications and models on
transmission expansion planning”. IEEE Transactions on Power Systems, v. 18, n.
2, p. 938–946.
37. Lee, C. W., Ng, S. K. K., Zhong J., Wu F. F. (2006). “Transmission expansion
planning from past to future. Power Systems Conference and Exposition”.
IEEE/PES, p. 257–265.
38. Levi V. A., C.M.S. (1991). "A new decomposition based method for optimal
expansion planning of large transmission networks", IEEE Transactions on Power
Systems, v. 6, n. 3, pp. 937-943.
39. Luz del Sur (2003). “Propuesta de Tarifas y Compensaciones para Sistemas
Secundarios de Transmisión de Luz del Sur”. URL disponible en:
http://www.osinergmin.gob.pe/
40. Luz del Sur (2009). “Propuesta de Tarifas y Compensaciones para Sistemas
Secundarios de Transmisión y Complementarios de Transmisión, correspondiente
al Área de Demanda 7”. URL disponible en: http://www.osinergmin.gob.pe/
41. Luz del Sur (2013). “Propuesta de Plan de Inversiones en Transmisión,
correspondiente al Área de Demanda 7”. URL disponible en:
http://www.osinergmin.gob.pe/
42. Maghoul P., Hosseini S. H., Buygi M. O., Shahidehpour M. (2009). “A multi-
objective framework for transmission expansion planning in deregulated
environments”. IEEE Transactions on power systems, v. 24, n. 2, p. 1051–1061.
43. Maghoul P., Hosseini S. H., Buygi M. O., Shahidehpour M. (2011). “A scenario-
basedmulti-objective model formulti-stage transmission expansion planning”. IEEE
Transactions on power systems, v. 26, n. 1, p. 470–478.
44. Ministerio de Energía y Minas (1992). “Ley de Concesiones Eléctricas”, Ley N°
25844. URL disponible en: http://www.minem.gob.pe/
45. Ministerio de Energía y Minas (1993). “Reglamento de Ley de Concesiones
Eléctricas”, Decreto Supremo N° 009-1993-EM. URL disponible en:
http://www.minem.gob.pe/
105

46. Ministerio de Energía y Minas (2006). “Ley Para Asegurar el Desarrollo Eficiente
de la Generación Eléctrica”, Ley N° 28832, 2006. URL disponible en:
http://www.minem.gob.pe/
47. Ministerio de Energía y Minas (2007). “Reglamento de Transmisión”, Decreto
Supremo N° 027-2007-EM. URL disponible en: http://www.minem.gob.pe/
48. Molina J., Rudnick H. (2011). “Transmission expansion plan: ordinal and
metaheuristic multiobjective optimization”. PowerTech, IEEE Trondheim. URL
disponible en: http://web.ing.puc.cl/~power/paperspdf/Powertech2011.pdf
49. Monticelli A. (1983). “Fluxo de carga em redes de energia elétrica”. Sao Paulo:
Editora Edgar Bucher Ltda. URL disponible en:
http://www.eletrica.ufpr.br/ufpr2/professor/8/Liv-
Monticelli%20Fluxo%20De%20Carga-1983.pdf
50. Monticelli A., Santos A., Pereira M. V. F. (1982). “Interactive transmission network
planning using a least-effort criterion”. IEEE Transactions on Power Apparatus and
Systems, PAS-101, n. 10, p. 3919–3925.
51. Motamedi A., Zareipour H., Buygi M. O., Rosehart W. D. (2010). “A transmission
planning framework considering future generation expansions in electricity markets”.
IEEE Transactions on power systems, v. 25, n. 4, p. 1987–1995.
52. Negrete L. P. G. (2010). “Planejamento da expansao de sistemas de transmissao
considerando análise de confiabilidade e incertezas na Demanda Futura”. Tese
(Doutorado) - Universidade Estadual Paulista Júlio de Mesquita Filho - UNESP,
Campus de Ilha Solteira. URL disponible en:
http://www.athena.biblioteca.unesp.br/exlibris/bd/bis/33004099080P0/2010/garcesn
egrete_lpg_dr_ilha.pdf
53. Oliveira G. C., B.S., Pereira M. V. F., Thome L. M. (2000). "Multi-stage
Transmission Expansion Planning Considering Mutiple Dispatches and Contingency
Criterion", In Anais do XV Congresso Brasileiro de Automática (CBA 2004I,
Universidade Federal do Rio do Sul, Gramado, Brasil. PP 5.
54. Oliveira E. J. de, Silva I. C. da, Carneiro J. S. (2005). “Transmission system
expansion planning using a sigmoid function to handle integer investment variables”.
IEEE Transactions on Power Systems, v. 20, n. 3, p. 1616–1621.
106

55. Organismo Supervisor de Inversión en Energía y Minas (2013), “Procedimiento
Técnico PR-20 del Comité de Operación Económica del Sistema: Ingreso,
Modificación y Retiro de Instalación en el SEIN”, Resolución N° 035-2013-OS/CD.
URL disponible en: http://www.osinergmin.gob.pe/
56. Organismo Supervisor de Inversión en Energía y Minas (2013). “Norma Tarifas
URL disponible en: http://www.osinergmin.gob.pe/y Compensaciones para los
Sistemas Secundarios de Transmisión y Sistemas Complementarios de
Transmisión”, Resolución N° 217-2013-OS/CD. URL disponible en:
http://www.osinergmin.gob.pe/
57. Pajan P. (2010). “Análisis de riesgo y su impacto en el desarrollo de los sistemas de
transmisión. PP 137.
58. Pereira M. V., Pinto L. M. V. G. (1985). “Application of sensitivity analysis of load
supplying capability to interactive transmission expansion planning”. IEEE
Transactions on Power Apparatus and Systems, PAS-104, 1985.
59. Rider M. J., Gallego L.A., Romero R., García A.V. (2007). “Heuristic Algorithm to
Solve the Short Term Transmission Expansion Planning”. Power Engineering
Society General Meeting, 2007. IEEE. URL disponible en:
http://www.researchgate.net/publication/4263435_Heuristic_Algorithm_to_Solve_the
_Short_Term_Transmission_Network_Expansion_Planning
60. Rider M., García A., Romero R. (2007). “Power system transmission network
expansion planning using ac model”. IET Generation, Transmission and Distribution,
v. 1, n. 5, p. 731–742.
61. Rider M., García A., Romero R. (2008). “Transmission system expansion planning
by a Branch-and-Bound algorithm”. Generation, Transmission and Distribution, IET,
v. 2, n. 1, p. 90–99.
62. Rider M., García A. V., Romero R. A. (2004). “Short term transmission network
expansion planning using an interior point method”. IX SEPOPE, Rio de Janeiro. PP
7.
63. Rider M. J. (2006). “Planejamento da expansao de sistemas de transmissao
usando os modelos CC CA e tecnicas de programacao nao linear”. Tese
(Doutorado) - Universidade Estadual de Campinas, Campinas. URL disponible en:
107

http://www.feis.unesp.br/#!/departamentos/engenharia-eletrica/pesquisas-e-
projetos/lapsee/producao-bibliografica/teses-de-doutorado/
64. Romero R., Gallego R., Monticelli A. (1996). “Transmission system expansion
planning by simulated annealing”. IEEE Transactions on Power Systems, v. 11, n. 1,
p. 364–369.
65. Romero R., Gallego R., Monticelli A. (1998). “Transmission system expansión
planning by extended genetic algorithms”. IEEE Proceedings Generation,
Transmission and Distribution, v. 145, n. 3, p. 329–335.
66. Romero R., García A., Haffner S. (2002). “Test systems and mathematical models
for transmission network expansion planning”. IEEE Proceedings Generation,
Transmission and Distribution, v. 149, n. 1, p. 27–36.
67. Romero R., Monticelli A. (1994). “A hierarchical decomposition approach for
transmission network expansion planning”. IEEE Transactions on Power Systems,
v. 9, n. 1, p. 373–380.
68. Romero R., Monticelli A. (2000). “Planejamento a Longo Prazo de Sistemas de
Transmissão de Energía Eléctrica”, DEE – FEIS – UNESP. PP 397.
69. Romero R. A. (1989). “Planejamento da expansao de sistemas de transmissao por
decomposicao de Benders hierarquizada”. Dissertacao (Mestrado) - Universidade
Estadual de Campinas, Campinas. URL disponible en:
http://www.feis.unesp.br/#!/departamentos/engenharia-eletrica/pesquisas-e-
projetos/lapsee/producao-bibliografica/dissertacoes-de-mestrado/
70. Romero R. A. (1993). “Um método de decomposicao para o planejamento a longo
prazo de sistemas de transmissao”. Tese (Doutorado) - Universidade Estadual de
Campinas, Campinas. URL disponible en:
http://www.feis.unesp.br/#!/departamentos/engenharia-eletrica/pesquisas-e-
projetos/lapsee/producao-bibliografica/teses-de-doutorado/
71. Roy Billington (1970). “Power system reliability evaluation”. URL disponible en:
http://books.google.com.pe/books/about/Power_System_Reliability_Evaluation.html
?id=WYPp9i2aYeMC&redir_esc=y
72. Sanchez I. G., Romero R., Mantovani J. R. S. (2005). Transmission expansión
planning using the dc model and nonlinear programming technique. IEE Proceeding
in Generation Transmission and Distribution, v. 152, n. 6, p. 763–769.
108

73. Santos H. C. (2007). “Planejamento da expansao de sistemas de transmissao
considerando a retirada de linhas de transmissao”. Dissertacao (Mestrado) -
Universidade Estadual Paulista J´ulio de Mesquita Filho - UNESP, Campus de Ilha
Solteira. URL disponible en:
http://www.feis.unesp.br/Home/departamentos/engenhariaeletrica/pos-
graduacao/210-dissertacao_helio_clementino_dos_santos.pdf
74. Silva A. L. da, Rezende L., Honorio L. Manso L. (2011). “Performance
comparison of metaheuristics to solve the multi-stage transmission expansión
planning problem”. Generation, Transmission and Distribution, IET, v. 5, n. 3, p.
360–367.
75. Silva E. L. da, Gil H. A., Areiza J.M. (2000). “Transmission network expansion
planning under an improved genetic algorithm”. IEEE Transactions on Power
Systems, v. 15, n. 4, p. 1168–1175.
76. Silva I., Rider M., Romero R. (2006). “Transmission network expansion planning
considering uncertainty in demand”. IEEE Transactions on Power Systems, v. 21, n.
4, p. 1565–1573.
77. Silva I., Rider M., Romero R., García A., Murari C. (2005). “Transmission network
expansion planning with security constraints”. IEEE Proceedings Generation,
Transmission and Distribution, v. 152, n. 6, p. 828–836.
78. Styczynski Z. A. (1999). “Power network planning using game theory”. In
Proceeding 13th Power Systems Compututation Conference, Trondheim. URL
disponible en: http://www.gbv.de/dms/tib-ub-hannover/311192335.pdf
79. Sum-Im T., Taylor G., Irving M., Song Y. (2009). “Differential evolution algorithm
for static and multistage transmission expansion planning. Generation, Transmission
and Distribution”. IET, v. 3, n. 4, p. 365–384.
80. Taylor J. A., Hover F. S. (2011). “Linear relaxations for transmission system
planning”. IEEE Transactions on power systems, v. 26, n. 4, p. 2533–2538.
81. Tor O. B., Guven A. N., Shahidehpour M. (2008). “Congestion-driven transmission
planning considering the impact of generator planning”. IEEE Transactions on
Power Systems, v. 23, n. 2, p. 781–789.
109

82. Torre S. de la, Conejo A. J., Contreras J. (2008). “Transmission expansion
planning in electricity markets”. IEEE Transactions on Power Systems, v. 23, n. 1, p.
238–248.
83. Verma A., Panigrahi B., Bijwe P. (2010). “Harmony search algorithm for
transmission network expansion planning”. Generation, Transmission and
Distribution, IET, v. 4, n. 6, p. 663–673.
84. Villasana R., Garver L., Salon S. (1985). “Transmission network planning using
linear programming”. IEEE Transactions on Power Apparatus and Systems, PAS–
104, n. 2, p. 349–356.
85. Vinasco G., Rider M. J., Romero R. (2011). “A strategy to solve the multistage
transmission expansion planning problem”. IEEE Transactions on power systems, v.
26, n. 4, p. 2574–2576.
86. Xu Z., Dong Z. Y., Wong K. P. (2003). “Transmission planning in a desreguled
environment”. IEE Proceedings Generation, Transmission and Distribution, v. 153,
n. 3, p.826–831.
87. Willis, H. L. (2004). “Power Distribution Planning Reference Book”, Marcel Dekker,
Inc., 2nd ed. PP 832. URL disponible en:
http://books.google.com.pe/books/about/Power_Distribution_Planning_Reference_B
o.html?id=34Kd7ol1dMUC&redir_esc=y
88. Zhao J. H., Dong Z. Y., Lindsay P., Wong K. P. (2009). “Flexible transmission
expansion planning with uncertainties in an electricity market”. IEEE Transactions
on power systems, v. 24, n. 1, p. 479–488.
110

APÉNDICE A
A.1 Sistema Garver de 06 barras
Barra 1
Barra 2
Barra 5
Barra 3
Barra 6 Barra 4
50.0
80.0
165.0
545.0
240.0
240.0
160.0
40.0
R1
R3R13
R7R10
R14
R9
R12 R15 R5
R11
R4
R2
R6
R8
A.1.1. Datos de demanda
Número de
Barra
Carga [MW]
Año05 Año10 Año15 Año20
1 20 40 60 80 2 80 133 187 240 3 10 20 30 40 4 60 93 127 160
111

Número de
Barra
Carga [MW]
Año05 Año10 Año15 Año20
5 100 147 193 240 6
Suma 270.0 433.0 597.0 760.0
A.1.2. Datos de generación
Número de
Barra
Generation Sin Redespacho [MW]
Generation Con Redespacho [MW]
Año05 Año0 Año5 Año20 Año05 Año10 Año15 Año20 1 50 50 50 50 150 50 50 50 2 3 165 165 165 165 240 360 360 360 4 5 6 545 545 545 545 600 600 600 600
Suma 760 760 760 760 990 1,010 1,010 1,010
A.1.3. Datos de generación
Número de
Línea
Barra Inicial
Barra Final
Líneas Existentes
Reactancia [pu]
Capacidad de
Transmisión [MW]
Costo [US$ .103]
1 1 2 1 0.40 100.0 40 2 1 3 0.38 100.0 38 3 1 4 1 0.60 80.0 60 4 1 5 1 0.20 100.0 20 5 1 6 0.68 70.0 68 6 2 3 1 0.20 100.0 20 7 2 4 1 0.40 100.0 40 8 2 5 0.31 100.0 31 9 2 6 0.30 100.0 30 10 3 4 0.59 82.0 59 11 3 5 1 0.20 100.0 20 12 3 6 0.48 100.0 48 13 4 5 0.63 75.0 63 14 4 6 0.30 100.0 30 15 5 6 0.61 78.0 61
112

A.2 Sistema IEEE de 24 barras
A.2.1. Datos de demanda y generación
Número de
Barra
Carga [MW] Generación[MW]
Año05 Año10 Año15 Año20 Año05 Año10 Año15 Año20
1 179.9 218.9 266.3 324.0 576 576 576 576 2 161.6 196.6 239.2 291.0 576 576 576 576 3 299.8 364.8 443.8 540.0 - - - - 4 123.3 150.0 182.5 222.0 - - - - 5 118.3 143.9 175.1 213.0 - - - - 6 226.5 275.6 335.3 408.0 - - - - 7 208.2 253.3 308.2 375.0 900 900 900 900 8 284.9 346.6 421.6 513.0 - - - - 9 291.5 354.7 431.5 525.0 - - - -
10 324.8 395.2 480.8 585.0 - - - - 11 - - - - - - - -
113

Número de
Barra
Carga [MW] Generación[MW]
Año05 Año10 Año15 Año20 Año05 Año10 Año15 Año20
12 - - - - - - - - 13 441.4 537.1 653.4 795.0 1,773 1,773 1,773 1,773 14 323.2 393.2 478.4 582.0 - - - - 15 528.1 642.5 781.7 951.0 645 645 645 645 16 166.6 202.7 246.6 300.0 465 465 465 465 17 - - - - - - - - 18 554.7 674.9 821.1 999.0 1,200 1,200 1,200 1,200 19 301.5 366.8 446.3 543.0 - - - - 20 213.2 259.4 315.6 384.0 - - - - 21 - - - - 1,200 1,200 1,200 1,200 22 - - - - 900 900 900 900 23 - - - - 1,980 1,980 1,980 1,980 24 - - - - - - - -
Suma 4,747.5
5,776.1
7,027.5
8,550.0
10,215
10,215
10,215
10,215
A.2.3. Datos de líneas
Número de
Línea
Barra Inicial
Barra Final
Líneas Existentes
Reactancia [pu]
Capacidad de
Transmisión [MW]
Costo [US$ .106]
1 1 2 1 0.01 175.0 3.0 2 1 3 1 0.21 175.0 55.0 3 1 5 1 0.08 175.0 22.0 4 2 4 1 0.13 175.0 33.0 5 2 6 1 0.19 175.0 50.0 6 3 9 1 0.12 175.0 31.0 7 3 24 1 0.08 400.0 50.0 8 4 9 1 0.10 175.0 27.0 9 5 10 1 0.09 175.0 23.0 10 6 10 1 0.06 175.0 16.0 11 7 8 1 0.06 175.0 16.0 12 8 9 1 0.17 175.0 43.0 13 8 10 1 0.17 175.0 43.0 14 9 11 1 0.08 400.0 50.0 15 9 12 1 0.08 400.0 50.0 16 10 11 1 0.08 400.0 50.0 17 10 12 1 0.08 400.0 50.0 18 11 13 1 0.05 500.0 66.0 19 11 14 1 0.04 500.0 58.0 20 12 13 1 0.05 500.0 66.0 21 12 23 1 0.10 500.0 134.0 22 13 23 1 0.09 500.0 120.0 23 14 16 1 0.04 500.0 54.0 24 15 16 1 0.02 500.0 24.0 25 15 21 2 0.05 500.0 68.0 26 15 24 1 0.05 500.0 72.0
114

Número de
Línea
Barra Inicial
Barra Final
Líneas Existentes
Reactancia [pu]
Capacidad de
Transmisión [MW]
Costo [US$ .106]
27 16 17 1 0.03 500.0 36.0 28 16 19 1 0.02 500.0 32.0 29 17 18 1 0.01 500.0 20.0 30 17 22 1 0.11 500.0 146.0 31 18 21 2 0.03 500.0 36.0 32 19 20 2 0.04 500.0 55.0 33 20 23 2 0.02 500.0 30.0 34 21 22 1 0.07 500.0 94.0 35 1 8 0 0.13 500.0 35.0 36 2 8 0 0.13 500.0 33.0 37 6 7 0 0.19 500.0 50.0 38 13 14 0 0.04 500.0 62.0 39 14 23 0 0.06 500.0 86.0 40 16 23 0 0.08 500.0 114.0 41 19 23 0 0.06 500.0 84.0
115

A.3 Sistema Subtransmisión de Luz del Sur 220 kV
116

A.3.1. Datos de demanda
Barra Carga [MW] N° Código Año05 Año08 Año10 Año20 Año30 6 PL+ 24.9 29.1 31.5 48.6 70.4 8 CL+ 64.1 72.5 78.6 117.1 167.3
11 Z+ 445.8 414.3 447.0 296.5 382.2 12 SJ+ 356.7 409.5 279.5 305.4 407.9 13 ID+ 344.8 394.3 385.9 353.0 441.2 14 PN+ 85.2 79.3 85.8 96.3 122.2 15 CJ+ 207.2 239.3 264.5 189.9 326.8 16 AP+ 141.3 162.0 178.1 269.7 385.9 17 LU+ 305.8 355.4 391.0 260.3 358.0 18 CE+ - - - 412.8 433.4 19 PT+ - - 171.3 265.3 361.7 20 RP+ - - - 337.6 452.4 21 BV - - - 125.9 183.7 22 CR - - - 52.0 182.2 23 L2 - - - 21.8 90.3 24 LA - - - 43.1 62.5 25 LC - - - 85.3 150.3 26 LF - - - - 76.3 27 LS - - - 103.9 161.3 28 MI - 85.3 95.1 145.4 197.8 29 ML - - - 32.6 123.9 30 MT - - - 100.0 177.6 31 SB - - - 74.4 171.1 32 SS - 39.1 53.9 108.3 192.3 33 UR - - 48.2 112.3 171.6
Suma 1,975.8 2,280.0 3,957.7 5,850.4
A.3.1. Datos de generación
Barra Generación Máxima [MW] N° Código Año05 Año08 Año10 Año20 Año30 1 PL++ 1,200 1,200 1,200 1,200 1,200 2 CR++ 1,200 1,200 1,200 1,200 1,200 3 CL++ 1,200 1,200 1,200 1,200 1,200 4 NW1++ - - 1,200 1,200 1,200 5 NW2++ - - 1,200 1,200 1,200
44 S5 200 200 - - - Suma 3,800 3,800 6,000 6,000 6,000
117

A.4 Sistema Subtransmisión de Luz del Sur 220 y 60 kV
118
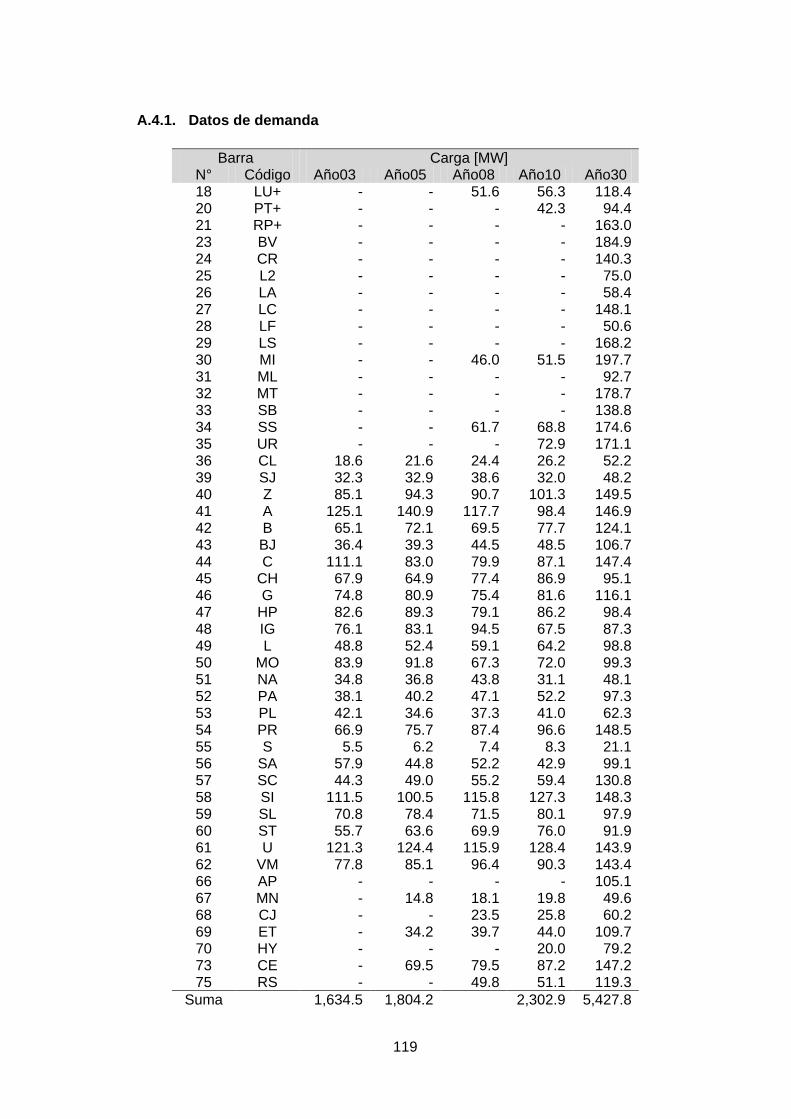
A.4.1. Datos de demanda
Barra Carga [MW] N° Código Año03 Año05 Año08 Año10 Año30 18 LU+ - - 51.6 56.3 118.4 20 PT+ - - - 42.3 94.4 21 RP+ - - - - 163.0 23 BV - - - - 184.9 24 CR - - - - 140.3 25 L2 - - - - 75.0 26 LA - - - - 58.4 27 LC - - - - 148.1 28 LF - - - - 50.6 29 LS - - - - 168.2 30 MI - - 46.0 51.5 197.7 31 ML - - - - 92.7 32 MT - - - - 178.7 33 SB - - - - 138.8 34 SS - - 61.7 68.8 174.6 35 UR - - - 72.9 171.1 36 CL 18.6 21.6 24.4 26.2 52.2 39 SJ 32.3 32.9 38.6 32.0 48.2 40 Z 85.1 94.3 90.7 101.3 149.5 41 A 125.1 140.9 117.7 98.4 146.9 42 B 65.1 72.1 69.5 77.7 124.1 43 BJ 36.4 39.3 44.5 48.5 106.7 44 C 111.1 83.0 79.9 87.1 147.4 45 CH 67.9 64.9 77.4 86.9 95.1 46 G 74.8 80.9 75.4 81.6 116.1 47 HP 82.6 89.3 79.1 86.2 98.4 48 IG 76.1 83.1 94.5 67.5 87.3 49 L 48.8 52.4 59.1 64.2 98.8 50 MO 83.9 91.8 67.3 72.0 99.3 51 NA 34.8 36.8 43.8 31.1 48.1 52 PA 38.1 40.2 47.1 52.2 97.3 53 PL 42.1 34.6 37.3 41.0 62.3 54 PR 66.9 75.7 87.4 96.6 148.5 55 S 5.5 6.2 7.4 8.3 21.1 56 SA 57.9 44.8 52.2 42.9 99.1 57 SC 44.3 49.0 55.2 59.4 130.8 58 SI 111.5 100.5 115.8 127.3 148.3 59 SL 70.8 78.4 71.5 80.1 97.9 60 ST 55.7 63.6 69.9 76.0 91.9 61 U 121.3 124.4 115.9 128.4 143.9 62 VM 77.8 85.1 96.4 90.3 143.4 66 AP - - - - 105.1 67 MN - 14.8 18.1 19.8 49.6 68 CJ - - 23.5 25.8 60.2 69 ET - 34.2 39.7 44.0 109.7 70 HY - - - 20.0 79.2 73 CE - 69.5 79.5 87.2 147.2 75 RS - - 49.8 51.1 119.3
Suma 1,634.5 1,804.2 2,302.9 5,427.8
119

A.4.1. Datos de generación
Barra Generación Máxima [MW] N° Codigo Año03 Año05 Año08 Año10 Año30 1 CL++ 1,200 1,200 1,200 1,200 1,200 2 PL++ 1,200 1,200 1,200 1,200 1,200 3 CP++ 1,200 1,200 1,200 1,200 1,200 4 SJ++ 1,200 1,200 5 NW1++ 1,200 6 NW2++ 1,200
86 S5 200 200 200 Suma 3,800 3,800 3,800 4,800 7,200
120

APÉNDICE B
La metodología desarrollada para la expansión de nuevas subestaciones se
muestra en el Esquema B.1. Según dicho esquema, el plan de expansión de las
subestaciones de potencia es efectuado sobre la base de una proyección espacial
de demanda a nivel subestaciones de distribución y clientes de media tensión.
Esquema B.1 Modelo de Expansión de Subestaciones de Potencia
Información Histórica de
Ventas
- Proyección de ventas Distritos Sectores de Consumo
- Factor de Crecimiento Distritos Sectores de Consumo
- Distritos - Sectores (residencial, comercial, industrial,…)
Información de Subestaciones de
Potencia (SEP) y NODOS
Proyección Espacialde Demanda
(NODOS)
Determinación de Nuevas SEP
(Polígonos de VORONOI)
Proyección de Demandaen NODOS
(coincidente con la máxima Demanda de las SEP)
Coordenadas UTM- SEP
- NODOS
Capacidad Máxima deDiseño en SEP
Demanda Base:- SEP
- NODOS
- Nuevas SEP
- Proyección de Demanda en SEP Existentes y Nuevas
Modelo de Proyección (Econométrico y/o
Tendencias)
121

B.1 Proyección espacial de energía
Sobre la base de la información histórica disponible, se proyectan las ventas de
energía utilizando modelos estadísticos y/o econométricos a grupos de consumo
agrupados por sectores de consumo (residencial, comercial, industrial, alumbrado público
y otros) y por distritos, según la zonas que correspondan los alcances de la planificación
de subestaciones de potencia.
Como resultado del análisis efectuado se tiene la proyección de ventas por sectores
de consumo y a nivel de distritos; y se obtienen factores de crecimiento anual
correspondientes. Dichas factores son utilizados para proyectar las ventas en cada
subestación de distribución y cliente de media tensión, denominados NODOS.
Dado que para los “nodos” se tiene como información, su ubicación (distrito al que
pertenece) y ventas de energía correspondiente al año base y de su composición
(residencial, comercial, industrial, alumbrado público y otros); sobre la base de los
factores de crecimiento obtenidos previamente, se determina la proyección de ventas en
cada “nodo” existente y su factor de crecimiento correspondiente. En el Esquema B.2 se
muestra un ejemplo:
Esquema B.2. Determinación de “factor de crecimiento en NODOS”
B.2 Proyección espacial de demanda
122

En esta etapa se tiene como objetivo proyectar la demanda espacialmente a nivel de
NODOS. Para conseguir tal objetivo, se sigue el siguiente procedimiento:
• Sobre la base de los registros de medición efectuados en cada SEP existente, se
determina el día y la hora en la cual se registra su máxima demanda.
• Para dicho instante se determina la demanda registrada en cada “nodo”, dado que
para la mayoría de “nodos” no se dispone dicha data, se utiliza la demanda en
hora punta y/o fuera de punta, según sea el caso.
• Se determina factor de ajuste (KMD) para aquéllos “nodos” que no disponen
registros en el instante de máxima demanda de la SEP. Para ello se utiliza la
siguiente formulación:
∑∑==
+=m
kk
n
iijMDjSEP NodoDNodoDKMD
11)().( )()(*
MDSEP(j) : Máxima Demanda de la SEP “j”.
D(Nodo)i : Demanda del nodo “i” que no cuenta con registro en el instante de
máxima demanda de la SEP al que pertenece.
D(Nodo)k : Demanda del nodo “k” registrada en el instante de máxima
demanda de la SEP al que pertenece.
KMD(j) : Factor de ajuste del nodo “i”.
• Se determina la demanda base para aquéllos “nodos” que no disponen registros
en el instante de máxima demanda de la SEP, utilizando la siguiente formulación:
ijMDi NodoDKNodoDM )(*)( )(=
• Finalmente, se proyecta la demanda la demanda de cada “nodo”, multiplicando a
la demanda base el factor de crecimiento del año correspondiente:
AñoBASEAñoYAñoY XNodoDMXNodoFactorXNodoDM )""(*)""()""( =
B.3 Plan de expansión de subestaciones de potencia (SEP)
Para el desarrollo se sigue el siguiente procedimiento:
123

• Proyección de demanda en SEP existentes: Terminado la proyección de demanda
de los “nodos”, se agrupa a todos aquellos que pertenecen a una subestación de
potencia existente; luego, mediante una simple sumatoria se determina la
demanda asignada a cada subestaciones de potencia, el cálculo se efectúa para
todos los años. De este modo se determina la proyección de demanda en las SEP
existentes.
• Necesidad de nuevas SEP: Se determina cuando la demanda proyectada
(obtenida en el cálculo anterior) supera la capacidad máxima de diseño de las
SEP. Para dicho año se plantea la necesidad de una nueva SEP.
• Dado que el proceso es iterativo y secuencial en el tiempo, la necesidad de
nuevas SEP se evalúa considerando la demanda de los “nodos” correspondiente
al año horizonte.
• Para el horizonte de planeamiento, aleatoriamente se ubican futuras nuevas SEP
cercanos a aquellas que presentan problemas de sobrecarga. Dicha ubicación
inicial puede ser el centro geométrico entre tres o cuatro SEP existentes.
𝑢𝑡𝑚_𝑥(𝑁𝑣𝑎𝑆𝐸𝑇) =1𝑛
× � 𝑢𝑡𝑚_𝑥(𝑆𝐸𝑇𝑖)𝑛
𝑖=1
𝑢𝑡𝑚_𝑦(𝑁𝑣𝑎𝑆𝐸𝑇) =1𝑛
× � 𝑢𝑡𝑚_𝑦(𝑆𝐸𝑇𝑖)𝑛
𝑖=1
Donde: n = número de subestaciones agrupadas
• Estas ubicaciones iniciales sirven para evaluar la carga que tomaría cada SEP
según los polígonos de Voronoi. Los polígonos de Voronoi representan una
subdivisión en regiones formadas por los lugares más próximos a determinados
puntos de referencia; para éste estudio, los puntos de referencia estarían dados
por las SEP existentes y nuevas. Es decir, se asigna cada “nodo” a la SEP más
cercana y a partir de ello se determina la demanda de dicha SEP. Este criterio
permite optimizar el metrado de redes de media tensión, y con ello reducir
pérdidas y caída de tensión.
• Agrupados los “nodos” que forman parte de una SEP se procede a determinar el
centro de carga en cada SEP nueva; luego, con esta nueva ubicación se
desarrolla nuevamente el procedimiento anterior. Este proceso es iterativo y se
realiza hasta que la ubicación de la nueva SEP se ubique en su centro de carga.
124

• Al final del proceso de los dos puntos anteriores, en ninguna SEP existente y
nueva se debe tener problemas de sobrecarga. De ocurrir dicho problema, se
deben adicionar nuevas SEP necesarios para resolver las sobrecargas.
• El cálculo efectuado en los tres puntos anteriores debe contener como resultado
la menor cantidad de nuevas SEP.
• Finalmente, el año entrada de una nueva SEP corresponde a aquél año en la se
sobrecarga una de las existente al año anterior.
B.4 Resultados
Como resultado se tiene las nuevas subestaciones con sus respectivas coordenadas.
Asimismo se tiene la demanda año a año de cada subestación de potencia existente y
nueva, durante los 30 años de evaluación. En las tablas B.1 y B.2 se muestran las
demandas al año 30 de las SEP existentes y nuevas, respectivamente; asimismo, para el
caso de las nuevas, se indica el año en el que es necesaria su puesta en servicio.
Tabla B.1. Demanda de año 30 y coordenadas de SEP Existentes
SET EXISTENTE
CAPACIDAD MÁXIMA DISEÑO
COORDENADA UTM_X
COORDENADA UTM_Y
DEMANDA (MVA)
A 150.00 285725.79 8666500.55 147.28 B 150.00 280672.07 8656423.95 140.87 BJ 100.00 325351.16 8593872.16 112.31 C 150.00 280556.37 8663023.66 146.12
CH 100.00 282231.07 8651152.29 94.21 CL 100.00 312209.87 8617964.39 54.98 G 150.00 278757.12 8665640.33 122.24
HP 100.00 291114.57 8672319.71 81.09 IG 100.00 287982.04 8666349.37 91.85 L 100.00 295087.34 8643821.97 96.68
MO 100.00 285130.93 8662902.13 95.53 NA 50.00 301788.95 8673942.48 46.90 PA 100.00 290825.29 8647700.77 98.45 PL 100.00 290439.15 8663260.22 65.56 PR 150.00 299471.61 8639708.35 138.80 S 100.00 307289.91 8630363.51 22.24
SA 100.00 288190.33 8650388.91 93.50 SC 150.00 294783.84 8670935.89 137.71
125
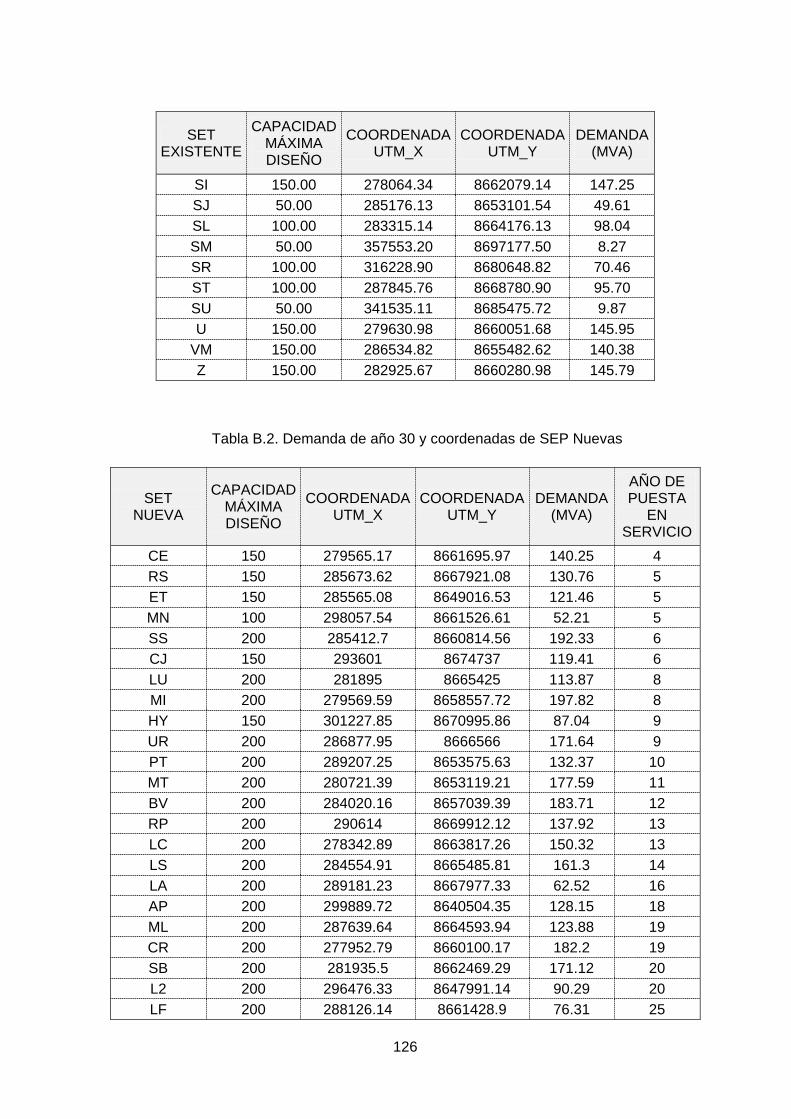
SET EXISTENTE
CAPACIDAD MÁXIMA DISEÑO
COORDENADA UTM_X
COORDENADA UTM_Y
DEMANDA (MVA)
SI 150.00 278064.34 8662079.14 147.25 SJ 50.00 285176.13 8653101.54 49.61 SL 100.00 283315.14 8664176.13 98.04 SM 50.00 357553.20 8697177.50 8.27 SR 100.00 316228.90 8680648.82 70.46 ST 100.00 287845.76 8668780.90 95.70 SU 50.00 341535.11 8685475.72 9.87 U 150.00 279630.98 8660051.68 145.95
VM 150.00 286534.82 8655482.62 140.38 Z 150.00 282925.67 8660280.98 145.79
Tabla B.2. Demanda de año 30 y coordenadas de SEP Nuevas
SET NUEVA
CAPACIDAD MÁXIMA DISEÑO
COORDENADA UTM_X
COORDENADA UTM_Y
DEMANDA (MVA)
AÑO DE PUESTA
EN SERVICIO
CE 150 279565.17 8661695.97 140.25 4 RS 150 285673.62 8667921.08 130.76 5 ET 150 285565.08 8649016.53 121.46 5 MN 100 298057.54 8661526.61 52.21 5 SS 200 285412.7 8660814.56 192.33 6 CJ 150 293601 8674737 119.41 6 LU 200 281895 8665425 113.87 8 MI 200 279569.59 8658557.72 197.82 8 HY 150 301227.85 8670995.86 87.04 9 UR 200 286877.95 8666566 171.64 9 PT 200 289207.25 8653575.63 132.37 10 MT 200 280721.39 8653119.21 177.59 11 BV 200 284020.16 8657039.39 183.71 12 RP 200 290614 8669912.12 137.92 13 LC 200 278342.89 8663817.26 150.32 13 LS 200 284554.91 8665485.81 161.3 14 LA 200 289181.23 8667977.33 62.52 16 AP 200 299889.72 8640504.35 128.15 18 ML 200 287639.64 8664593.94 123.88 19 CR 200 277952.79 8660100.17 182.2 19 SB 200 281935.5 8662469.29 171.12 20 L2 200 296476.33 8647991.14 90.29 20 LF 200 288126.14 8661428.9 76.31 25
126

En la tabla B.3 se muestran los nombres de las subestaciones existentes:
Tabla B.3. Subestaciones de potencia existentes
Código Nombre Código Nombre A Puente SC Santa Clara B Barranco SI San Isidro BJ Bujama SJ San Juan C Limatambo SL Salamanca
CH Chorrillos SM San Mateo CL Chilca SR Chosica G Galvez ST Santa Anita
HP Huachipa SU Surco IG Ingenieros U Luis Neyra L Lurin VM Villa María
MO Monterrico Z Balnearios NA Ñaña PA Pachacamac PL La Planicie PR Las
Praderas S San Bartolo
SA El Salvador
127





























